Prądy wirowe -wprowadzenie
Wykorzystanie efektu prądów wirowych do diagnozowania
stanu materiałów
1. Charakterystyka ogólna zasady wykorzystania efektu prądów
wirowych w nieniszczących badaniach materiałów
Metody wykorzystujące efekt prądów wirowych do badania stanu materiału w sposób
nieniszczący polegają na wykrywaniu za pomocą zmiennego pola magnetycznego lokalnych
różnic fizycznych własności materiału badanych elementów powodujących zmianę natężenia
tych prądów. W praktyce wykonuje się to w ten sposób, że badany element, o określonych
wymiarach, wykonany z materiału o danej elektrycznej przewodności właściwej i
przenikalności magnetycznej, poddaje się działaniu zmiennego pola magnetycznego
wytwarzanego przez cewkę zbliżoną do
elementu (metoda cewki stykowej) lub przez
cewkę otaczającą ten element (metoda cewki
obwodowej).
Pod wpływem tego
zmiennego
pola
magnetycznego
w
elemencie indukują się prądy wirowe, które
z kolei wytwarzają własne pole, skierowane
zgodnie z regułą Lenza, przeciwnie do pola
cewki. Pole magnetyczne od
prądów
wirowych występuje także poza elementem
badanym i w obrębie cewki powstaje wobec
tego pole wypadkowe różne od pierwotnego.
Zmiana ta zależy od elektrycznych i
magnetycznych własności materiału tego
elementu i jego wymiarów oraz od
Rys. 1. Schemat ilustrujący efekt prądów
konstrukcji cewki i częstotliwości pola
wirowych dla cewki zewnętrznej. Ho –
wzbudzającego. Schematycznie konfigurację
pole wzbudzane przez cewkę, Hs – pole
obu pól pokazano na Rys. 1 dla przypadku
wytwarzane przez prądy wirowe
cewki stykowej ,[1].
Rozkład prądów wirowych a zatem i wypadkowego pola magnetycznego zostaje zakłócony w
przypadku pojawienia się wady o charakterze nieciągłości materiału. Obecność takiej wady
zmniejsza czynny przekrój dla przepływu prądów wirowych, dając w przybliżeniu efekt taki,
jak zmniejszanie się przewodności właściwej w obszarze działania cewki.
Sonda prądów wirowych (przetwornik) składa się z dwóch lub więcej cewek. W
pierwszym przypadku przetwornik zawiera cewkę nadawczą (generująca zmienne pole
magnetyczne) oraz cewkę detekcyjną umieszczoną wewnątrz cewki nadawczej. Taki
przetwornik nazywa się przetwornikiem bezwzględnym. Napięcie indukowane w cewce
detekcyjnej podczas ruchu sondy względem badanego obiektu jest analizowane tak, aby
zauważyć względne zmiany w amplitudzie lub fazie napięcia indukowanego w tej cewce.
Zazwyczaj zamiast jednej cewki detekcyjnej stosuje się dwie takie same cewki umieszczone
obok siebie. Są one połączone anty-równolegle po to, aby uzyskać sygnał napięciowy tylko
wówczas, gdy różne są strumienie indukcji przenikających obie cewki. Taki przetwornik
nazywa się ‘różnicowym’.
1
Prądy wirowe -wprowadzenie
Na Rys. 2. zilustrowano dwie podstawowe konfiguracje przetworników różnicowych
(a - przelotowy – i b - stykowy), [2]. Należy zwrócić uwagę na kierunek nawinięcia uzwojeń
cewek detekcyjnych. Sygnał różnicowy napięć z obu cewek jest największy wówczas, gdy
tylko jedna z cewek znajduje się w obszarze nieciągłości.
Wielkość zakłócenia powodowanego przez wadę zależy od wielkości powierzchni przekroju
prostopadłego do kierunku prądów wirowych, który nazywamy czynnym przekrojem wady.
Nawet głęboka wada biegnąca w kierunku zgodnym z liniami prądów wirowych nie daje
prawie żadnego zakłócenia prądów wirowych, podczas gdy nawet płytka wada, ale prostopadła do linii prądów.
Charakterystyczne dla rozkładu prądów wirowych jest także to, że ich natężenie, największe
2. Podstawowe
konfiguracje
różnicowych:
naRys.
powierzchni
elementu,
zmniejszaprzetworników
się w miarę posuwania
się w głąb i spada do poziomu
a)
przetwornik
stykowy,
b)
przetwornik
przelotowy;
1
–
element
– cewka
bliskiemu zera na głębokości określonej jako głębokość wnikania. badany,
Wskutek2tego
największe
magnesująca,
3 dwie
cewki detekcyjne,
4 –sąlinie
siłwady
pola powierzchniowe,
generowanego przez
cewkę
zakłócenia
prądów
wirowych
powodowane
przez
które
z tego
magnesującą,
nieciągłość,
6 – linieod
prądów
wirowych
właśnie
powodu5są– łatwiej
wykrywalne
wad wewnętrznych.
Na Rys. 2. zilustrowano dwie podstawowe konfiguracje przetworników różnicowych (a przelotowy – i b - stykowy), [2]. Należy zwrócić uwagę na kierunek nawinięcia uzwojeń
cewek detekcyjnych. Sygnał różnicowy napięć z obu cewek jest największy wówczas, gdy
tylko jedna z cewek znajduje się w obszarze nieciągłości.
Wielkość zakłócenia powodowanego przez wadę zależy od wielkości powierzchni
przekroju prostopadłego do kierunku prądów wirowych, który nazywamy czynnym
przekrojem wady. Nawet głęboka wada biegnąca w kierunku zgodnym z liniami prądów
wirowych nie daje prawie żadnego zakłócenia prądów wirowych, podczas gdy nawet płytka
wada, ale prosto-padła do linii prądów.
Charakterystyczne dla rozkładu prądów wirowych jest także to, że ich natężenie,
największe na powierzchni elementu, zmniejsza się w miarę posuwania się w głąb i spada do
poziomu bliskiemu zera na głębokości określonej jako głębokość wnikania. Wskutek tego
największe zakłócenia prądów wirowych powodowane są przez wady powierzchniowe, które
z tego właśnie powodu są łatwiej wykrywalne od wad wewnętrznych.
2
Prądy wirowe -wprowadzenie
2. Podstawy fizyczne efektu prądów wirowych
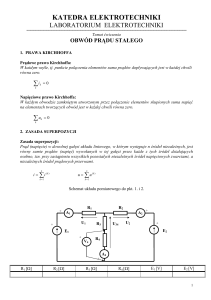
2.1. Podstawowe prawa
2.1.1. Uogólnione prawo indukcji Faradaya
Siła elektromotoryczna Є w obwodzie zamkniętym jest
efektem wystąpienia wirowego pola elektrycznego
indukowanego wokół obszaru zmiennego w czasie pola
magnetycznego
Całka po konturze L umieszczonym w zmiennym w
czasie polu magnetycznym o natężeniu B
dS
dl
B
E
Rys. 2. Ilustracja dla prawa Faradaya
Є ≡ ∫Edl = ∫ Ecosdl
E dl
L
(1)
d Φm
1
B dS
dt
dt S
(2)
Zmiana w czasie strumienia indukcji magnetycznej m generuje wirowe pole elektryczne E o
natężeniu takim, iż całka po krzywej zamkniętej L z iloczynu skalarnego E i elementu krzywej dl
równa się pochodnej ze strumienia m przez powierzchnię zamkniętą S rozpiętą na konturze L
2.1.2 Prawo Ohma
Pole elektryczne E w przewodniku powoduje przepływ prądu o gęstości powierzchniowej j
j=E,
(3)
gdzie jest przewodnictwem właściwym. Uwaga: = 1/ρ, ρ – opór właściwy.
2.1.3. Relacja między B i H
Wewnątrz materiału o względnej przenikalności magnetycznej μr umieszczonym w
zewnętrznym polu magnetycznym o natężeniu H powstaje indukcja magnetyczna B o
natężeniu
B = μo μr H,
(4)
gdzie μo jest stałą przenikalności magnetycznej; μo = 4 ·10-7 H/m
Uwaga: zaniedbuje się efekt brzegowe, a w szczególności efekt demagnetyzacji obiektu.
1.2.4. Pole magnetyczne wytwarzane przez prąd wirowy
W środku pętli o promieniu r z prądem o natężeniu i wytwarza się pole magnetyczne H o
natężeniu :
H = i / 2r
(5)
3
Prądy wirowe -wprowadzenie
Problem do rozwiązania
Założenia:
1. cewka stykowa zbliżona jest do przewodzącej płyty o wymiarach znacznie większych
od średnicy czy wysokości cewki.
2. cewka wytwarza zmienne w czasie pole magnetyczne o natężeniu H = Ho sin (ω t ).
3. płyta jest wykonana z materiału o przenikalności magnetycznej μr = i
przewodnictwie właściwym o wartości
Pytania:
1. jaka jest gęstość prądu wirowego płynącego w płycie?
2. jakie jest natężenie pola magnetycznego generowanego przez ten prąd?
Odpowiedź
Ad 1. Natężenie prądu wirowego płynącego wzdłuż konturu L będącego okręgiem o
promieniu r i polu przekroju poprzecznego s (materiał o przewodnictwie elektrycznym )
można wyliczyć z gęstości prądu j danej przez (3)
i=sj = sE
(6)
Natężenie E wirowego pola elektrycznego wg. (2) zależy od długości konturu L = 2 r oraz
od szybkości zmian strumienia indukcji magnetycznej B wg. (2):
E = ½ r · dB/dt .
(7)
Przyjmując, iż spełniona jest zależność (4) między polem w cewce stykowej a indukcją
magnetyczna wewnątrz płyty, uzyskuje się oszacowanie na i :
i = μr r s · dH/dt
(8)
Wynika stąd, iż natężenie prądów wirowych w przewodniku magnesowanym zmiennym
polem magnetycznym zależy od przewodnictwa elektrycznego przewodnika. Im większe
przewodnictwo, tym większe jest natężenie prądów wirowych. Na to natężenie mają także
wpływ właściwości magnetyczne przewodnika. Im większa jest jego przenikalność
magnetyczna tym większy jest strumień indukcji magnetycznej a zatem większa jest wartość
siły elektromagnetycznej a tym samym i natężenie prądu wirowego.
Ad. 2. Natężenie magnetycznego pola generowanego wewnątrz materiału przez prąd wirowy
oszacować można na podstawie (5). Znając to pole można oszacować wynikający stąd
poziom indukcji magnetycznej stosując ponownie (4):
Bi = (μ r) 2 · · ¼ dH/dt
(9)
Natężenie magnetycznego pola rozproszonego przy powierzchni magnesowanego materiału
jest sumą pola od cewki stykowej i pola magnetycznego wytwarzanego przez prądy wirowe.
Z wyrażenia (9) wynika wniosek, iż pole rozproszone jest złożoną funkcją właściwości
elektrycznych i magnetycznych badanego materiału.
Uwaga: Dokładne obliczenia wartości pola rozproszonego wymagają zastosowania techniki
elementów skończonych(MES)
4
Prądy wirowe -wprowadzenie
3. Opis układu pomiarowego
3.1 . Przetwornik różnicowy
Na Rys. 3.
Rys. 3. Schemat budowy przetwornika różnicowego: L1 – cewka
magnetyzująca, L2 i L3 – cewki detekcyjne
Rys. 4. Schemat modelu przetwornika
różnicowego przy badaniu elementu o zakrzywionej
powierzchni
5
Prądy wirowe -wprowadzenie
3.2. Układ analizy sygnałów napięciowych z przetwornika
Rys. 5. Schemat blokowy analizatora – generator prądu zasilającego przetwornik
L1, L2, L3 – cewki przetwornika; A1 i A2 wzmacniacze wstępne (z przesuwnikami
fazowymi i regulacją wzmocnienia), A3 – wzmacniacz różnicowy, A4 – układ
mnożący, A5 – wzmacniacz wyjściowy, A6 – układ filtra dolno przepustowego; U2,
U3, UA1, UA4 i U) – sygnały na wyjściach elementów układu
Opracowany analizator sygnałów napięciowych indukowanych w obu cewkach ma za
zadanie wyznaczać w sposób syntetyczny i różnicę faz i różnicę amplitud dla napięcia U2 w
cewce aktywnej i napięcia U3 w cewce odniesienia. Za miarę syntetyczną tych różnic
przyjęto wielkość Uo, która jest wartością średnią po czasie z wartości iloczynu napięcia U3
i różnicy napięć U2 i U3. Opracowaną metodę wyznaczania wartości Uo ilustruje
schematycznie rysunek 2. Sygnał napięciowy (1) jest wzmocnioną różnicą napięć U3 - U2
a sygnał (2) to przebieg iloczynu U3 i różnicy napięć U2 i U3. Wartość średnia sygnału (2)
jest ujemna, co pokazuje przebieg napięcia Uo (3). Napięcie Uo uzyskuje się w analizie
Fouriera napięcia (2), jako składową częstotliwościową fF = 0 Hz. W praktyce - dla
porównania różnych układów pomiarowych a także i porównania z wynikami modelowania –
stosowana jest nie bezpośrednio wartość Uo ale wielkość bezwymiarowa Uor. Jest ona
wyliczana jako iloraz wartości Uo i kwadratu amplitudy napięcia: Uor = 100*Uo/(U3)2.
6
Prądy wirowe -wprowadzenie
Poniżej pokazano efekt symulacji komputerowej działania analizatora
4
3
U[V]
2
1
0
U3
U2
-1
-2
-3
-4
0
50
100
150
200
250
time [ s ]
Rys. 6. Symulacja sygnałów indukowanych w cewkach
detekcyjnych z podkreśleniem różnicy faz między nimi
30
1 - k*(U3 - U2);
20
2
2 - UA3*U3;
3 - U0
1.0
0.5
0.0
0
-0.5
3
-10
-20
-30
-1.0
U0 [ V ]
U[V]
1
10
-1.5
0
100
200
300
400
-2.0
500
times ]
Rys. 7. Przebiegi czasowe sygnałów przetworzonych przez analizator
na podstawie sygnałów indukowanych w przetworniku: 1 – sygnał
różnicowy, 2 – iloczyn sygnału różnicowego i sygnału odniesienia, 3 –
wartość średnia z sygnału drugiego
7
Prądy wirowe -wprowadzenie
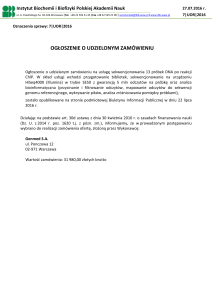
Na rys. 8 pokazano wyniki pomiarów wykonanych dla materiałów modelowych: miedzi
elektrotechnicznej, ołowiu, stali austenitycznych oraz dla stali niskowęglowej (St3). Próbki
miały postać prostopadłościanów o grubości większej niż głębokość wnikania prądów
wirowych. Pokazano też wyniki modelowania uzyskane dla miedzi oraz dla ołowiu.
Rys. 8. Zależność częstotliwościowa parametru Uor uzyskana dla:
1 - Cu – miedzi, 2 - Pb – ołowiu, 3 - Aus – austenit, 4 - St3 –stal
niskowęglowa; linią przerywaną zaznaczono wyniki modelowania
uzyskane dla miedzi (1t) oraz dla ołowiu (2t)
W każdym z przypadków materiałem ‘odniesienia’ było powietrze. W obliczeniach dla
miedzi i ołowiu przyjęto dla przewodnictwa elektrycznego wartości odpowiednio 58*106
S oraz 5*106 S. Na podstawie wyników pokazanych na Rys. 3 można stwierdzić dwie
podstawowe właściwości dla zależności częstotliwościowych parametru Uor. Są to: quasi
eksponencjalne malenie wartości Uor w miarę wzrostu częstotliwości badania oraz
przesuniecie w kierunku wartości dodatnich poziomu początkowego Uor (dla małych
częstotliwości) w miarę malenia przewodnictwa elektrycznego oraz wzrostu przenikalności
magnetycznej. Wartości Uor dla materiałów niemagnetycznych (miedź i ołów) są zawsze
ujemne. Wykres (3) dla austenitu pokazuje, iż dla małych częstotliwości Uor jest dodatnie i
staje się ujemne dla większych częstotliwości od około 5 kHz. Wyniki dla stali
ferromagnetycznej są zawsze i to znacząco dodatnie. Modelowane zależności Uor od
częstotliwości magnesowania zgadzają się, jak widać, bardzo dobrze ilościowo z danymi
doświadczalnymi. Przyczyną ‘fizyczną’ obserwowanych zależności jest głównie zmiana
amplitudy napięcia indukowanego w cewce ‘aktywnej’. Amplituda sygnału U2 jest tym
mniejsza od amplitudy sygnału U3 im większe jest przewodnictwo elektryczne materiału
badanego. Wzrost przenikalności magnetycznej skutkuje efektywnie wzrostem amplitudy
sygnału U2 w porównaniu z sygnałem dla materiału niemagnetycznego. Wpływ przesunięcia
fazowego (opóźnienie fazy U2 względem U3 rzędu 1 stopnia) na parametr Uor jest
znacząco mniejszy.
8
Prądy wirowe -wprowadzenie
4. Wyniki modelowania rozkładu pola
Modelowanie dotyczyło rozkładu przestrzennego B wokół płyty o grubości h = 5 mm
wykonanej z różnych materiałów . Płyta magnesowana jest za pomocą cewki z przetwornika
różnicowego z częstotliwością f = 5 kHz . Wewnątrz przetwornika widoczne są dwie cewki
detekcyjne. Kolejne rysunki przedstawiają:
- model geometryczny (sieć węzłów)
- rozkłady modułu B dla powietrza oraz dla miedzi, austenitu i stali .
Uwaga: dla stali pokazano także stan dla f = 0.
Należy zwrócić uwagę równicę w natężeniu B w obu cewkach detekcyjnych.
9
Prądy wirowe -wprowadzenie
Rys. 4.1. Model MES płyty z sondą dotykową
Rys. 4.2. Rozkład przestrzenny modułu indukcji magnetycznej; materiał – powietrze
10
Prądy wirowe -wprowadzenie
Rys. 4.3. Rozkład przestrzenny modułu indukcji magnetycznej; materiał – Cu, częstotliwość 5 kHz
Rys. 4.4. Rozkład przestrzenny modułu indukcji magnetycznej; materiał – austenit, częstotliwość 5 kHz
11
Prądy wirowe -wprowadzenie
Rys. 4.5. Rozkład przestrzenny modułu indukcji magnetycznej; materiał – stal, częstotliwość 0 kHz
Rys. 4.6. Rozkład przestrzenny modułu indukcji magnetycznej; materiał – stal, częstotliwość 5 kHz
12
Prądy wirowe -wprowadzenie
5. Artykuł
B. Augustyniak, M. Chmielewski, M. Augustyniak, L. Piotrowski, M. Sablik; O zastosowaniu metody prądów
wirowych do technicznego pomiaru własności elektrycznych i magnetycznych metali, MIT 2006. Materiały i
Technologie, no. 4,.wyd. Wydział Mechaniczny PG, (2006), s. 13-16
O ZASTOSOWANIU METODY PRĄDÓW WIROWYCH DO TECHNICZNEGO
POMIARU WŁASNOŚCI ELEKTRYCZNYCH I MAGNETYCZNYCH METALI
ABOUT APPLICATION OF EDDY CURRENT METHOD FOR TECHNICAL
MEASUREMENT OF ELCTRIC AND MAGNETIC PROPERTIES OF
METALS
Bolesław Augustyniak1, Marek Chmielewski1, Marek Augustyniak1, Leszek Piotrowski1,
Wojciech Sadowski1, Martin Sablik2
1
Politechnika Gdańska, Wydział Fizyki Technicznej i Matematyki Stosowanej, Katedra
Fizyki Ciała Stałego
ul. G. Narutowicza 11/12, 80-952 Gdańsk, [email protected]
2
Southwest Research Institute, San Antonio, P.O. Drawer 28610, USA
Słowa kluczowe: prądy wirowe, właściwości elektromagnetyczne, metale, modelowanie
Key words: eddy currents, electromagnetic properties, metals, modelling
STRESZCZENIE
Opisano wyniki badań nad wykorzystaniem efektu prądów wirowych do badania własności
elektrycznych i magnetycznych metali. Badania wykonywano za pomocą sondy różnicowej.
Wyniki pomiarów zależności częstotliwościowej wykonane dla modelowych materiałów
porównano z wynikami modelowania metodą elementów skończonych.
SUMMARY
Paper describes results of research of application of eddy current technique for electric and
magnetic properties evaluation of metals. Measurements were made with differential probe.
Frequency dependence of output signals obtained for model like materials were compared
with model predictions obtained with FEM method.
WSTĘP
Kontrola stanu materiału i szacowanie pozostałej trwałości elementów instalacji ulegających
procesowi degradacji muszą być wynikiem kompleksowych badań diagnostycznych,
prowadzonych według ściśle przyjętych procedur. Szczególne znaczenie i ekonomiczne i
techniczne mają metody nieniszczące badań a wśród nich – w przypadku stali eksploatowanych
w energetyce metody użyteczne do detekcji zmian właściwości elektro-magnetycznych tych
materiałów. Metodą szczególnie przydatną
do takich zadań wydaje się być metoda
wykorzystująca zjawisko prądów wirowych, gdyż ich natężenie jest tym większe, im większe
jest przewodnictwo materiału i większa względna przenikalność magnetyczna r [1].
Opisane tu wyniki stanowią fragment badań dotyczących zagadnienia detekcji zmian właściwości
elektro-magnetycznych eksploatowanych stali austenitycznych [2]. Przedstawiamy tu wyniki
badań mających na celu weryfikację skuteczności zastosowanej procedury pomiaru właściwości
elektro-magnetycznych. Wyniki pomiarów dla wybranych materiałów ‘wzorcowych’ zostały
porównane z wynikami modelowania wykonanego metodą elementów skończonych.
13
Prądy wirowe -wprowadzenie
METODYKA BADAŃ
3
4
U[V]
Schemat budowy opracowanej głowicy pomiarowej dla efektu prądów wirowych pokazano na
rys. 1. Schemat budowy opracowanej głowicy pomiarowej dla efektu prądów wirowych
pokazano na rys. 1.
30
1,0
1 - k*(U3 - U2); 2 - UA3*U3; 3 - Uo
20
0,5
1
2
10
0,0
0
-0,5
-10
-1,0
2b
2a
1
-20
-30
-1,5
3
0
100
200
300
400
-2,0
500
czas s ]
Rys. 1. Głowica prądów wirowych;
objaśnienie w tekście
Rys. 2. Zmiany głównych sygnałów
napięciowych w układzie detektora
Prądy wirowe są indukowane w materiale badanym (1) za pomocą magnetycznego pola
przemiennego generowanego przez cewkę (3). Zastosowano dwie cewki detekcyjne: aktywną
(2a) i odniesienia (2b). Cewka odniesienia może być ‘obciążana’ płytką (4), którą traktuje
się jako materiał odniesienia. Opracowany analizator sygnałów napięciowych indukowanych
w obu cewkach ma za zadanie wyznaczać w sposób syntetyczny i różnicę faz i różnicę
amplitud dla napięcia U2 w cewce aktywnej i napięcia U3 w cewce odniesienia. Za miarę
syntetyczną tych różnic przyjęto wielkość Uo, która jest wartością średnią po czasie z
wartości iloczynu napięcia U3 i różnicy napięć U2 i U3. Opracowaną metodę wyznaczania
wartości Uo ilustruje schematycznie rysunek 2. Sygnał napięciowy (1) jest wzmocnioną
różnicą napięć U3 - U2 a sygnał (2) to przebieg iloczynu U3 i różnicy napięć U2 i U3.
Wartość średnia sygnału (2) jest ujemna, co pokazuje przebieg napięcia Uo (3). Napięcie Uo
uzyskuje się w analizie Fouriera napięcia (2), jako składową częstotliwościową fF = 0 Hz. W
praktyce - dla porównania różnych układów pomiarowych a także i porównania z wynikami
modelowania – stosowana jest nie bezpośrednio wartość Uo ale wielkość bezwymiarowa Uor
lona przez kwadrat amplitudy napięcia: Uor = 100*Uo/(U3)2. Modelowanie metodą
elementów skończonych przeprowadzono za pomocą oprogramowania typu ANSYS
udostępnionego przez DES-ART w Gdyni. Model geometryczny przeprowadzonych obliczeń
stanowił kopię układu pomiarowego. Obliczenia natężenia prądów wirowych w stali
ferromagnetycznej przeprowadzano zaniedbując efekty histerezowe oraz przyjmując stałą
wartość przenikalności magnetycznej. Sygnały napięciowe indukowane w obu cewkach
detekcyjnych wyznaczano na podstawie całki z szybkości zmian strumienia indukcji
magnetycznej w objętości tych cewek.
Wartości przewodności elektrycznej oraz
przenikalności magnetycznej dla obliczeń przyjęto z danych literaturowych.
14
Prądy wirowe -wprowadzenie
WYNIKI BADAŃ I DYSKUSJA
Badania wykonano dla materiałów modelowych: miedzi elektrotechnicznej, ołowiu, stali
austenitycznych oraz dla stali niskowęglowej (St3). Próbki miały postać prostopadłościanów
o grubości większej niż głębokość wnikania prądów wirowych.
Na Rys. 3 przedstawiono wyniki pomiarów dla wymienionych czterech materiałów oraz
Rys. 3. Zależność częstotliwościowa parametru Uor uzyskana dla:
1 - Cu – miedzi, 2 - Pb – ołowiu, 3 - Aus – austenit, 4 - St3 –stal
niskowęglowa; linią przerywaną zaznaczono wyniki modelowania
uzyskane dla miedzi (1t) oraz dla ołowiu (2t)
przykładowo wyniki modelowania uzyskane dla miedzi oraz dla ołowiu. W każdym z
przypadków materiałem ‘odniesienia’ było powietrze. W obliczeniach dla miedzi i ołowiu
przyjęto dla przewodnictwa elektrycznego wartości odpowiednio 58*106 S oraz 5*106 S.
Na podstawie wyników pokazanych na Rys. 3 można stwierdzić dwie podstawowe
właściwości dla
zależności częstotliwościowych parametru
Uor. Są to:
quasi
eksponencjalne malenie wartości Uor w miarę wzrostu częstotliwości badania oraz
przesuniecie w kierunku wartości dodatnich poziomu początkowego Uor (dla małych
częstotliwości) w miarę malenia przewodnictwa elektrycznego oraz wzrostu przenikalności
magnetycznej. Wartości Uor dla materiałów niemagnetycznych (miedź i ołów) są zawsze
ujemne. Wykres (3) dla austenitu pokazuje, iż dla małych częstotliwości Uor jest dodatnie i
staje się ujemne dla większych częstotliwości od około 5 kHz. Wyniki dla stali
ferromagnetycznej są zawsze i to znacząco dodatnie. Modelowane zależności Uor od
częstotliwości magnesowania zgadzają się, jak widać, bardzo dobrze ilościowo z danymi
doświadczalnymi. Przyczyną ‘fizyczną’ obserwowanych zależności jest głównie zmiana
amplitudy napięcia indukowanego w cewce ‘aktywnej’. Amplituda sygnału U2 jest tym
mniejsza od amplitudy sygnału U3 im większe jest przewodnictwo elektryczne materiału
badanego. Wzrost przenikalności magnetycznej skutkuje efektywnie wzrostem amplitudy
sygnału U2 w porównaniu z sygnałem dla materiału niemagnetycznego. Wpływ przesunięcia
fazowego (opóźnienie fazy U2 względem U3 rzędu 1 stopnia) na parametr Uor jest
znacząco mniejszy.
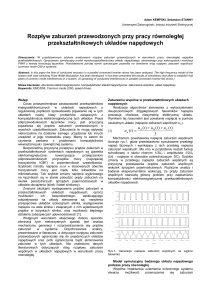
Zbadano również – zgodnie z zasadniczym celem podjętych badań – zależności
częstotliwościowe dla szeregu próbek austenitycznych różniących się zawartością fazy
ferromagnetycznej.
15
Prądy wirowe -wprowadzenie
3
2
1
0
Uor [ au ]
10s05
11S05
12s05
10s1
11s1
12s1
10s2
11s2
12s2
Aus
Aux10
Aux55
-1
-2
-3
-4
-5
-6
-7
-8
0
rozne-materi2-korekty
5
10
15
20
25
30
35
40
f [ kHz ]
Fig. 4. Porównanie zmierzonych wartości Uor dla trzech próbek
austenitycznych ( Aus, Aux10, Aux55,dueż punkty) z zależnościami
modelowanymi (wykresy liniowe+ małe punkty) dla trzech serii
danych (trzy wartości przewodnictwa [106] ( 0.5,1, 2) po trzy
wartości przenikalności magnetycznej μ (1.0, 1.1, 1.2)
Wyniki pomiarów leżą w strefie wykresów odpowiadających austenitowi o przewodnictwie
elektrycznym σ ~ 1 *106 S oraz względnej przenikalności magnetycznej w zakresie od około
μ ~ 1,05 (kwaraty) do około μ ~ 1,3 (otwarte kółka). Jak widać, zmierzone zmiany parametru
Uor dla zbadanych próbek są bardzo dobrze zgodne z przebiegiem modelowanym.
WNIOSKI
Opisano wyniki badań podstawowych nad wykorzystaniem efektu prądów wirowych do badania
własności elektrycznych i magnetycznych metali. Badania wykonywano za pomocą sondy
różnicowej a elektromagnetyczne właściwości materiału opisano za pomocą syntetycznego
parametru Uor. Porównanie wyników pomiarów zależności częstotliwościowej tego parametru
wykonane dla modelowych materiałów z wynikami modelowania
metodą elementów
skończonych dowodzi, że zastosowana metodyka badań jest bardzo skuteczna i przydatna do
szybkiej oceny właściwości elektromagnetycznych metali. Można, jak pokazano, za pomocą
efektu prądów wirowych identyfikować rodzaje materiałów a także wyznaczać – z zależności
częstotliwościowej - obie podstawowe wielkości fizyczne: przewodnictwo elektryczne oraz
przenikalność magnetyczną. Opisany układ pomiarowy jest wykorzystywany w szczególności do
stwierdzania zmian właściwości magnetycznych stali austenitycznych eksploatowanych w
przemyśle energetycznym.
LITERATURA
1. Dudziewicz J.: Podstawy elektromagnetyzmu, NT, Warszawa, 1972.
2. Augustyniak B., Chmielewski M., Piotrowski L., Głowacka M.: Elektro-magnetyczna
metoda badania procesu degradacji stali austenitycznych, Zeszyty Problemowe – Badania
nieniszczące 10 (2005) 178-185.
16