Wrocław University of Technology
SPOTKANIE 4:
Podstawowe rozkłady prawdopodobieństwa
Maciej Zięba
Studenckie Koło Naukowe ”Estymator”
[email protected]
27.10.2015
Pojęcie prawdopodobieństwa
Prawdopodobieństwo reprezentuje pewne przekonanie
dotyczące zjawisk.
Przekonanie to wyraża się pewną wartością rzeczywistą
z przedziału [0, 1].
Suma przekonań odnośnie wszystkich możliwych
zdarzeń jest równa 1.
Możliwe zdarzenia reprezentowane są za pomocą
zmiennej losowej X.
Przykład: rzut kostką sześcienną
X = {1, 2, 3, 4, 5, 6},
2/29
Interpretacja częstościowa prawdopodobieństwa
Rzuciłem kostką 15 razy:
3
2
2
3
2
3
razy
razy
razy
razy
razy
razy
wypadła
wypadła
wypadła
wypadła
wypadła
wypadła
”1”
”2”,
”3”
”4”,
”5”,
”6”.
Prawdopodobieństwo wylosowania ”6”
jest równe:
p(X = 6) = p(6) =
3
1
= .
15
5
3/29
Bayesowska interpretacja prawdopodobieństwa
Mamy informację, że ze względu na
własności fizyczne kostek
prawdopodobieństwo wylosowania ”6”
jest równe 16 .
Dla jednej na pięć kostek
wykorzystywanych w kasynach
prawdopodobieństwo wylosowania ”6”
równe 13 .
Prawdopodobieństwo wylosowania ”6”
jest równe:
p(6) =
1
4 1 1 1
· + · = .
5 6 5 3
5
4/29
Dyskretne zmienne losowe
Zbiór możliwych wartości X jest co
najwyżej przeliczalny.
Suma prawdopodobieństw równa się 1:
X
p(X = x) =
x∈X
X
p(x) = 1.
x∈X
Dla podzbioru A ⊆ X :
X
x∈A
p(x) = 1 −
X
p(x),
x∈¬A
gdzie ¬A stanowi dopełnienie zbioru A.
5/29
Ciągłe zmienne losowe
Rozkład opisuje funkcją gęstości p(x).
Prawdopodobieństwo X ∈ [a, b]:
p(a ¬ X ¬ b) =
Zb
p(x)dx
a
Dystrybuanta:
p(X ¬ b) = P (b) =
Zb
p(x)dx
−∞
Funkcja gęstości spełnia
reguły:
R
brzegową: p(x) = p(x, y)dy
łańcuchową: p(x, y) = p(x|y)p(y)
6/29
Wartość oczekiwana
Typową własnością rozkładu jest wartość oczekiwana
(średnia), którą dla rozkładu dyskretnego definiuje się
następująco:
E[X] =
X
x · p(x),
x∈X
dla rozkładu ciągłego definiuje się następująco:
E[X] =
Z
x · p(x)dx,
x∈X
Wartość oczekiwana dla rzutu monetą:
E[X] = 1 · θ + 0 · (1 − θ) = θ.
7/29
Wariancja i odchylenie standardowe
Wariancja jest własnością która opisuje rozpiętość
rozkładu (jak bardzo odchylają się wartości x od średniej)
i definiuje się następująco:
V ar[X] = E[(X − E[X])2 ] = E[X 2 ] − (E[X])2
Odchylenie standardowe definiowane jest jako
pierwiastek z wariancji:
std[X] =
q
V ar[X]
Wariancja dla rzutu monetą:
V ar[X] = θ · (1 − θ).
8/29
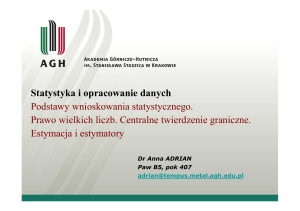
Korelacja i kowariancja
Miarą liniowej zależności pomiędzy zmienną losową X i
Y jest kowariancja zadana wzorem:
cov[X, Y ] = E[(X − E[X])(Y − E[Y ])]
= E[XY ] − E[X]E[Y ].
Kowariancja przyjmuje wartości z przedziału
(−∞, ∞), w praktyce wygodniej jest operować na
znormalizowanej postaci kowariancji nazywanej
korelacją:
cov[X, Y ]
,
corr[X, Y ] = q
V ar[X]V ar[Y ]
która przyjmuje wartości z przedziału [−1, 1].
9/29
Korelacja i kowariancja
10/29
Rozkład dwupunktowy
:
Zmienna losowa X ∼ Ber(θ) przyjmuje wartości ze
zbioru: X = {0, 1}.
Funkcja rozkładu prawdopodobieństwa:
Ber(x|θ) = θI(x=1) (1 − θ)I(x=0) = θx (1 − θ)1−x
Rozkład ma interpretację pojedynczego rzutu monetą.
Parametr θ reprezentuje prawdopodobieństwo sukcesu
w rzucie monetą.
Podstawowe własności rozkładu:
E[X] = θ, V ar[X] = θ · (1 − θ).
11/29
Rozkład wielopunktowy
Wektory binarnych zmiennych losowych spełniające
P
warunek K
i=1 xi = 1.
Funkcja rozkładu prawdopodobieństwa:
Cat(x, θ) =
K
Y
I(xi =1)
θi
i=1
Rozkład ma interpretację rzutu K-wymiarową kostką.
Parametr θi reprezentuje prawdopodobieństwo
wypadnięcia i oczek.
Podstawowe własności rozkładu:
E[Xj ] = θj , V ar[Xj ] = θj · (1 − θj ), cov[Xj , Xi ] = −θj θi
12/29
Rozkład jednostajny
Funkcja gęstości:
p(x) =
1
, x ∈ [a, b],
0,
w.p.p.
b−a
Podstawowe własności rozkładu:
E[X] =
funkcja gęstości
dystrybuanta
(b − a)2
a+b
, V ar[X] =
.
2
12
13/29
Rozkład Gaussa
Funkcja gęstości:
N (x|µ, σ 2 ) = √
(x−µ)2
1
e− 2σ2
2πσ 2
Podstawowe własności rozkładu:
E[X] = µ, V ar[X] = σ 2 .
14/29
Wielowymiarowy rozkład Gaussa
Funkcja gęstości:
N (x|µ, Σ) =
1
q
(2π)K/2 |Σ|−1
e−(x−µ)
T Σ−1 (x−µ)
Podstawowe własności rozkładu:
E[X] = µ, cov[X] = Σ.
Istotną własnością rozkładu jest
macierz precyzji Λ = Σ−1 .
15/29
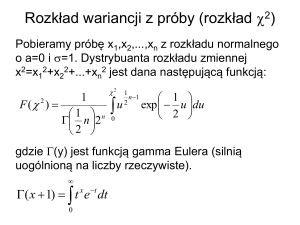
Rozkład Gamma
Funkcja gęstości:
Ga(x|a, b) =
Γ(b) =
Z∞
ba a−1 −bx
x e ,
Γ(b)
ub−1 e−u du.
0
Podstawowe własności rozkładu:
a
a
E[X] = , V ar[X] = 2 .
b
b
16/29
Rozkład Beta
Funkcja gęstości:
Beta(x|a, b) =
xa−1 (1 − x)b−1
,
B(a, b)
B(a, b) =
Γ(a)Γ(b)
Γ(a + b)
Podstawowe własności rozkładu:
E[X] =
V ar[X] =
a
a+b
ab
(a +
b)2 (a
+ b + 1)
.
17/29
Funkcja wiarygodności
Dysponujemy danymi
D = {(xn )}N
n=1 .
Rozpatrujemy model, który
generuje dane z pewnego rozkładu
p(x|θ).
Funkcję wiarygodności (ang.
likelihood function) definiuje się
następująco:
p(D|θ) =
N
Y
p(xn |θ).
n=1
18/29
Funkcja wiarygodności
Dysponujemy ciągiem obserwacji dotyczących
rzutu monetą D = {o, o, o, r, r, o, r, o, r}
Chcemy ocenić, czy bardziej wiarygodne jest,
że dane zostały wygenerowane:
z rozkładu Ber(x|0.5),
czy też z rozkładu Ber(x|0.75).
Wartości funkcji wiarygodności Ber(D|θ)
dla rozkładów wynoszą:
Ber(D|0.5) = 0.59 = 0.001953125,
Ber(D|0.75) = 0.754 · 0.255 = 0.00030899.
19/29
Funkcja wiarygodności
Dysponujemy ciągiem obserwacji dotyczących
rzutu monetą D = {o, o, o, r, r, o, r, o, r}
Chcemy ocenić, czy bardziej wiarygodne jest,
że dane zostały wygenerowane:
z rozkładu Ber(x|0.5),
czy też z rozkładu Ber(x|0.75).
Wartości funkcji wiarygodności Ber(D|θ)
dla rozkładów wynoszą:
Ber(D|0.5) = 0.59 = 0.001953125,
Ber(D|0.75) = 0.754 · 0.255 = 0.00030899.
19/29
Funkcja wiarygodności
Dysponujemy ciągiem obserwacji
D = {0.24, 0.32, 0.21, −0.2, −0.87,
0.23, −0.12, 0.01}
Chcemy ocenić, czy bardziej wiarygodne jest,
że dane zostały wygenerowane:
z rozkładu N (0, 1),
czy też z rozkładu N (1, 0.1).
Wartości funkcji wiarygodności
N (D|0, 1) = 0.00037608,
N (D|1, 0.1) = 2.15 · 10−20 .
20/29
Funkcja wiarygodności
Dysponujemy ciągiem obserwacji
D = {0.24, 0.32, 0.21, −0.2, −0.87,
0.23, −0.12, 0.01}
Chcemy ocenić, czy bardziej wiarygodne jest,
że dane zostały wygenerowane:
z rozkładu N (0, 1),
czy też z rozkładu N (1, 0.1).
Wartości funkcji wiarygodności
N (D|0, 1) = 0.00037608,
N (D|1, 0.1) = 2.15 · 10−20 .
20/29
Estymator maksymalnej wiarygodności
Interesuje nas znalezienie modelu o
najwyższej wiarygodności.
Formalnie, zadanie to formułujemy jako
zadanie optymalizacji:
θ̂ M LE = arg max p(D|θ)
θ
= arg max
θ
N
Y
p(xn |θ),
n=1
gdzie θ̂ M LE nazywany jest estymatorem
maksymalnej wiarygodności (ang.
maximal likelihood estimate, MLE).
21/29
Estymator maksymalnej wiarygodności
W praktyce definiuje się alternatywne
zadanie optymalizacji:
θ̂ M LE = arg min − log p(D|θ)
θ
= arg min
θ
N
X
− log p(xn |θ).
n=1
Okazuje się, że operacja logarytmu nie
zmienia położenia punktu
optymalnego!
22/29
Estymator maksymalnej wiarygodności
Negatywny logarytm z funkcji wiarygodności:
− log Ber(D|θ) = −
N
X
{xn log θ + (1 − xn ) log(1 − θ)}
n=1
= −m log θ − (N − m) log(1 − θ)
gdzie m oznacza liczbę sukcesów.
Estymator MLE:
θM LE =
m
,
N
23/29
Estymator maksymalnej wiarygodności
Negatywny logarytm z funkcji wiarygodności:
− log N (D|µ, σ 2 ) = −
N
N
1 X
N
(xn − µ)2 − log σ 2 − log 2π
2
2σ n=1
2
2
Estymator MLE parametru µ jest równy:
µM LE =
N
1 X
xn
N n=1
Estymator MLE parametru σ 2 :
2
σM
LE =
N
1 X
(xn − µM LE )2
N n=1
24/29
Estymator maksymalnego a posteriori
Załóżmy, że dysponujemy ciągiem obserwacji dotyczących
rzutu monetą D = {r, r, r, r, r}.
Jeżeli wykonamy estymację parametrów MLE parametru
θ wówczas:
θM LE =
5
m
= = 1.
N
5
W rezultacie otrzymujemy rozkład dwupunktowy dla
którego prawdopodobieństwo sukcesu 1.
W celu rozwiązania tego problemu załóżmy, że parametr
θ charakteryzuje się niepewnością.
25/29
Estymator maksymalnego a posteriori
Formalnie, zadanie to formułujemy jako zadanie
optymalizacji:
θ̂ M AP = arg max p(θ|D),
θ
gdzie θ̂ M AP nazywany jest estymatorem maksymalnego a
posteriori (ang. maximal a posteriori estimate, MAP).
Korzystając z reguły Bayesa ostatecznie mamy:
θ̂ M AP = arg max p(θ)p(D|θ).
θ
26/29
Estymator maksymalnego a posteriori
Wprowadźmy rozkład na parametr θ:
Beta(θ|a, b) =
Γ(a + b) a−1
θ (1 − θ)b−1 .
Γ(a)Γ(b)
Wówczas mamy dla rozkładu a posteriori:
p(θ|D) ∝
Γ(a + b + N ) m+a−1
θ
(1 − θ)l+b−1 ,
Γ(a + m)Γ(b + l)
gdzie l = N − m.
Estymator MAP:
θ̂M AP =
m+a−1
N +a+b−2
27/29
Uczenie Bayesowskie i częstościowe
W przypadku podejścia częstościowego konstrukcja
rozkładu przebiega następująco:
W pierwszym kroku wykonywana jest estymacja θ̂.
W drugim kroku ”wstawiamy” estymator θ̂ do rozkładu:
p(x|D) = p(x|θ̂)
W przypadku podejścia Bayesowskiego następuje
wycałkowanie względem parametrów θ:
p(x|D) =
Z
p(x|θ)p(θ|D)dθ
28/29
Uczenie Bayesowskie
Przykład
Interesuje nas znalezienie p(x = r|D):
p(x = r|D) =
Z1
Przykład:
p(x = r|θ)p(θ|D)dθ
0
=
Z1
0
θp(θ|D)dθ =
m+a
N +a+b
D=
{r, r, r, r, r, o, r}
a = 2, b = 3
6
7
7
=
10
θM LE =
m
N
m+a−1
θ̂M AP =
N +a+b−2
m+a
p(x = r|D) =
N +a+b
θM LE =
θ̂M AP
p(x = r|D) =
2
3
29/29