ĆWICZENIE 4
BADANIE STABILIZATORÓW NAPIĘCIA STAŁEGO
Cel ćwiczenia: zapoznanie z podstawowymi metodami stabilizacji napięcia stałego oraz
porównanie parametrów i właściwości różnych układów stabilizacji.
4.1. Podstawy teoretyczne
4.1.1. Stabilizowane wtórne źródła zasilania
Źródło zasilania jest jednym z podstawowych bloków każdego urządzenia
elektronicznego. Pierwotne źródła zasilania, jakimi są np.:
− sieć przemysłowa prądu przemiennego (3×400/230V 50 Hz),
− elektrochemiczne źródła prądu (ogniwa pierwotne, akumulatory),
− baterie słoneczne i termoogniwa,
nie są w stanie sprostać wszystkim wymaganiom stawianym źródłom zasilającym we
współczesnych urządzeniach elektronicznych. Z tego też powodu, między źródłem energii
(pierwotnym źródłem zasilania) a odbiornikiem stosuje się wtórne źródłami zasilania zwane
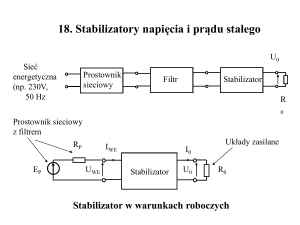
zasilaczami. Schemat blokowy zasilacza prądu stałego zawierającego wszystkie z możliwych
bloków funkcjonalnych przedstawia rys.4.1.
Rys.4.1 Schemat blokowy zasilacza napięcia stałego
Zasilanie urządzeń. Laboratorium
78
Podstawowymi zadaniami zasilaczy napięcia stałego są:
− przekształcenie napięcia zmiennego w napięcie stałe,
− oddzielenie galwaniczne zasilanych urządzeń od siebie oraz od obwodów
pierwotnych źródeł zasilania,
− regulacja napięć wyjściowych w sposób ręczny lub automatyczny,
− zabezpieczenie pierwotnego źródła zasilania itp.
Obok wymienionych zadań zasilacze powinny cechować się dużą niezawodnością i
sprawnością. W związku z tym miniaturyzacja zasilaczy przy jednoczesnym zwiększeniu ich
sprawności stanowi jedno z podstawowych zagadnień przy projektowaniu i ich konstrukcji.
Jednym z podstawowych sposobów rozwiązywania tego zagadnienia jest zwiększenie
częstotliwości przetwarzania energii elektrycznej w zasilaczach. Prowadzi to do znacznego
zmniejszenia masy i gabarytów elementów magnetycznych (transformatorów i cewek filtrów)
Jednym z elementów wtórnego źródła zasilania jest stabilizator, spełniający funkcję
utrzymania napięcia na stałym poziomie, niezależnie od zmian napięcia zasilającego
(wejściowego), prądu obciążenia, temperatury otoczenia i czasu
Uwy=const przy (Uwe, T, Iwy, t)=var .
(4.1)
4.1.2. Podstawowe parametry stabilizatorów napięcia stałego
Poniżej przedstawiono podstawowe parametry stabilizatorów. Ponieważ nie ma
jednoznacznych oznaczeń i definicji w tej dziedzinie - określonych przez normy - dlatego
podano definicje i oznaczenia spotykane w literaturze i kartach katalogowych gotowych
wyrobów. Wielu producentów zasilaczy (w tym również stabilizatorów) podaje tylko
wybrane parametry swojego wyrobu i to często wg najkorzystniejszej definicji.
Definiując parametry i oznaczenia w nawiasach podano oznaczenia alternatywne
spotykane w literaturze lecz nie stosowane w dalszej części podręcznika:
1. Znamionowe napięcie wyjściowe (na obciążeniu) prądu stałego Uwy, (UL, Uo) jest to
napięcie, dla którego stabilizator zaprojektowano.
2. Znamionowe napięcie wejściowe prądu stałego Uwe, (Uz, Ui) jest to napięcie, jakim należy
zasilić stabilizator, aby uzyskać na wyjściu znamionowe napięcie wyjściowe.
3. Zakres zmian napięcia wejściowego określający minimalną i maksymalną wartość
napięcia wejściowego stabilizatora. Napięcie minimalne jest to wartość napięcia, przy
której stabilizator uzyskuje zdolność stabilizowania napięcia na poziomie Uwys. Napięcie
Ćwiczenie 4. Badanie stabilizatorów napięcia stałego
79
maksymalne jest to wartość napięcia, powyżej której stabilizator nie może pracować
poprawnie (rys.4.2).
Rys.4.2 Zależność napięcia wyjściowego Uwy od zmian napięcia wejściowego Uwe
4. Różnica napięcia wejście-wyjście, określona jako minimalna i maksymalna różnica
między niestabilizowanym napięciem wejściowym Uwe a stabilizowanym napięciem
wyjściowym Uwy. Minimalna wartość różnicy napięć określa minimalny spadek napięcia
na elemencie regulacyjnym niezbędny do rozpoczęcia stabilizacji. Maksymalna wartość
różnicy zależy od parametrów zastosowanych elementów.
5. Znamionowy prąd wyjściowy Iwy (IL, Io) jest to maksymalna wartość prądu, jakim można
obciążyć stabilizator w warunkach normalnych przy założeniu, że nie przekracza się jego
dopuszczalnej mocy.
6. Prąd wyjściowy maksymalny, jest to prąd, przy którym rozpoczyna się działanie układu
nadprądowego zabezpieczenia stabilizatora Iwym(w stabilizatorach kompensacyjnych).
7. Napięcie tętnień jest to największa międzyszczytowa wartość składowej napięcia
wyjściowego,
której
częstotliwość
jest
wielokrotnością
częstotliwości
napięcia
zasilającego i częstotliwości przełączania generowanej przez zasilacz.
8. Współczynnik pulsacji (tętnień) napięcia wyjściowego stabilizatora kp, definiowany jako
stosunek amplitudy składowej zmiennej napięcia wyjściowego Uzm do wartości średniej
napięcia wyjściowego U0wy przy (U0we, Iwy, T =const).
kp =
U zm
U 0 wy
79
.
(4.2)
Zasilanie urządzeń. Laboratorium
80
9. Współczynnik tłumienia tętnień Kt określa zdolność stabilizatora do zmniejszania
składowej zmiennej napięcia na wyjściu Uzwy w stosunku do jej wartości na wejściu Uzwe i
wyraża się stosunkiem współczynnika tętnień na wejściu stabilizatora do współczynnika
tętnień na jego wyjściu (przy stałych Iwy=const, Uwe = const, T=const)
k pwe
Kt =
k pwy
.
(4.3)
10. Współczynnik stabilizacji napięcia wyjściowego przy zmianach napięcia wejściowego
zwany też stabilnością wejściową jest wskaźnikiem oddziaływania zmian napięcia
wejściowego na napięcie wyjściowe, przy niezmiennym obciążeniu i temperaturze.
SU =
ΔU 0 we
,
ΔU 0 wy
(4.4)
gdzie: U0we, U0wy - wartość średnia napięcia na wejściu i wyjściu stabilizatora
lub w mierze względnej
ΔU 0 we
ΔU 0 we [%] U 0 Nwe
,
=
SU % =
ΔU 0 wy [%] ΔU 0 wy
U 0 Nwy
(4.5)
gdzie: ΔU0wy - zmiana napięcia wyjściowego przy zmianie napięcia wejściowego U0we, od
minimum do maksimum (tzn. o ΔU0we),
U0Nwy - nominalne napięcie wyjściowe (wartość średnia),
U0Nwe - nominalne napięcie wejściowe (wartość średnia).
Z punktu widzenia zasilanego urządzenia ważne jest, aby niestabilność napięcia
wyjściowego Uwy stabilizatora od powodujących ją czynników była jak najmniejsza. Czasem
zamiast współczynnika stabilizacji określa się niestabilność napięcia wyjściowego przy
zmianie napięcia zasilania. Definiuje się ją jako zmianę napięcia wyjściowego ±ΔU0wy
podawaną w [mV] lub [%] napięcia wyjściowego nominalnego U0wy, przy zmianie napięcia
wejściowego w ustalonych granicach ±ΔU0we. Niestabilność napięcia wyjściowego podaje się
dla zmian napięcia wejściowego o ±10%, o 1V lub dla całego zakresu dopuszczalnego zmian
napięcia wejściowego
δU 0(U ) =
( ±U 0 wy )U
U 0 wy
⋅ 100 %.
(4.6)
Ćwiczenie 4. Badanie stabilizatorów napięcia stałego
81
11. Współczynnik stabilizacji napięcia wyjściowego przy zmianach prądu obciążenia zwany
też
stabilnością
obciążenia
rozumiany
jako
zmiana
stabilizowanego
napięcia
wyjściowego wywołana określoną zmianą prądu wyjściowego Iwy (obciążenia) przy stałej
temperaturze i napięciu wejściowym.
SI =
ΔI 0 wy
ΔU 0 wy
,
(4.7)
lub w mierze względnej
ΔI 0 wy
SI % =
ΔI 0 wy [%]
ΔU 0 wy [%]
=
I 0 Nwy
ΔU 0 wy
(4.8)
U 0 Nwy
gdzie: ΔU0wy - zmiana napięcia wyjściowego przy zmianie prądu obciążenia I0wy od
minimum do maksimum (tzn. o ΔI0wy),
U0Nwy - nominalne napięcie wyjściowe (wartość średnia),
I0Nwy - nominalny prąd obciążenia (wartość średnia).
Często zamiast stabilności obciążenia podaje się jako parametr równoważny
rezystancję wyjściową Rwy dla prądu stałego zdefiniowaną jako stosunek zmiany napięcia
wyjściowego ΔU0wy do wywołującego tę zmianę przyrostu prądu obciążenia ΔI0wy przy
U0we=const i T=const
Rwy =
ΔU 0 wy
ΔI 0 wy
.
(4.9)
Innym parametrem, zamiast stabilności obciążenia, określającym wpływ prądu
obciążenia na napięcie stabilizowane jest niestabilność napięcia wyjściowego przy zmianach
prądu obciążenia. Określa się ją jako zmianę napięcia wyjściowego, odpowiadająca zmianie
prądu obciążenia najczęściej od wartości minimalnej do wartości nominalnej lub dla zmiany
prądu w określonych granicach i jest podawana w [mV] lub [%] napięcia wyjściowego
δU 0( I ) =
( ±U 0 wy ) I
U 0 wy
⋅ 100 % .
(4.10)
12. Stabilność statystyczna pełna określa wpływ równoczesnego działania wszystkich
czynników destabilizujących. Stabilizowane napięcie wyjściowe zależy od czterech
81
Zasilanie urządzeń. Laboratorium
82
określonych zmiennych niezależnych Uwy= f(Iwy, Uwe, T, t) i dlatego stabilność pełna jest
sumą stabilności cząstkowych
dU wy =
∂U wy
∂I wy
⋅ dI wy +
∂U wy
∂U we
⋅ dU we +
∂U wy
∂T
⋅ dT +
∂U wy
∂t
⋅ dt .
(4.11)
Z energetycznego punktu widzenia ważne jest, aby stabilizator przekazywał energię z
wejścia na wyjście przy możliwie małych stratach. Skuteczność tego procesu określa
sprawność mocy stabilizatora, będąca stosunkiem mocy wyjściowej do mocy wejściowej.
Moc wejściowa jest równa sumie mocy wyjściowej i mocy strat w stabilizatorze.
η=
Pwy
Pwe
=
Pwy
Pwy + Pstr
⋅100%
(4.12)
4.1.3. Metody stabilizacji napięcia stałego
Stabilizowane napięcie do zasilania urządzeń elektronicznych można uzyskać za
pomocą stabilizatorów napięcia stałego przetwarzających niestabilizowane napięcie stałe na
napięcie stałe stabilizowane.
Wśród wielu podziałów różniących się rodzajem przyjętego kryterium (rys.4.3), istnieje
podział z punktu widzenia sprzężenia zwrotnego na:
−
stabilizatory bez sprzężenia zwrotnego (parametryczne),
−
stabilizatory z jednym lub kilkoma obwodami sprzężenia zwrotnego
kompensacyjne).
Ze względu na sposób pracy elementu regulacyjnego stabilizatory kompensacyjne
można podzielić na:
−
stabilizatory o działaniu ciągłym,
−
stabilizatory o działaniu impulsowym,
−
stabilizatory kombinowane (impulsowo-ciągłe).
Ćwiczenie 4. Badanie stabilizatorów napięcia stałego
83
Rys. 4.3. Podział stabilizatorów napięcia
Z kolei stabilizatory kompensacyjne o działaniu ciągłym ze względu na sposób
włączenia elementu regulacyjnego w stosunku do obciążenia dzielimy na:
−
stabilizatory szeregowe (element regulacyjny włączony szeregowo z obciążeniem),
−
stabilizatory równoległe (element regulacyjny włączony równolegle do obciążenia).
W tym miejscu należy wspomnieć, że również stabilizator parametryczny zaliczany jest
do stabilizatorów o regulacji ciągłej, choć nie jest to stabilizator kompensacyjny.
Stabilizatory impulsowe są układami zawierającymi przetwornice tranzystorowe i są
wyposażone w układ sprzężenia zwrotnego. Stabilizatory te ze względu na układ
występującej w nich przetwornicy dzielimy na:
−
stabilizatory dławikowe,
−
stabilizatory transformatorowe.
Ze względu na sposób sterowania elementu wykonawczego stabilizatora impulsowego
można wyróżnić:
−
stabilizatory samowzbudne o regulacji dwupołożeniowej,
−
stabilizatory o ciągłej regulacji współczynnika wypełnienia impulsu.
83
Zasilanie urządzeń. Laboratorium
84
4.1.3.1. Parametryczny stabilizator napięcia
Stabilizacja parametryczna polega na takiej samoistnej zmianie parametrów układu, pod
wpływem zmian napięcia lub prądu, że wielkość stabilizowana na wyjściu układu zmienia się
tylko w granicach dopuszczalnych. W parametrycznych stabilizatorach napięcia, stabilizacja
napięcia stałego jest realizowana za pomocą elementów o nieliniowej charakterystyce
prądowo-napięciowej takich jak np: diody Zenera, warystory, termistory, dławiki nasyconepołączonych szeregowo lub równolegle z obciążeniem.
Podstawowy układ parametrycznego stabilizatora napięcia na diodzie Zenera
przedstawia rys. 4.4
a)
b)
Rys.4.4. Parametryczny stabilizator napięcia a) układ podstawowy b) charakterystyka prądowo-napięciowa
diody Zenera (Dz − element nieliniowy, R − rezystor, Ro – obciążenie)
Dioda Zenera włączona zaporowo może pracować jako stabilizator napięcia dopiero po
przekroczeniu pewnego napięcia progowego zwanego napięciem Zenera UBR. Wartość tego
napięcia ustalana jest w procesie produkcji diody na poziomie od kilku aż do kilkudziesięciu
woltów. Stabilizacja parametryczna będąca przykładem stabilizacji ciągłej, realizowana jest
w zakresie liniowej części charakterystyki elementu nieliniowego, jakim jest dioda Zenera
rys. 4.4b. Stabilizator parametryczny pracuje poprawnie w zakresie określonym przez
minimalny i maksymalny prąd stabilizacji Iz elementu nieliniowego.
Działanie stabilizatora polega na tym, że do chwili osiągnięcia przez napięcie na
obciążeniu wartości UBR prąd w diodzie Zenera jest bardzo mały. Po osiągnięciu przez
napięcie wartości progowej prąd w diodzie gwałtownie rośnie, powodując także gwałtowny
Ćwiczenie 4. Badanie stabilizatorów napięcia stałego
85
wzrost prądu wypadkowego płynącego przez rezystor R a tym samym i spadku napięcia na
nim. W konsekwencji działanie takie kompensuje przyrost napięcia wejściowego i utrzymuje
napięcie na obciążeniu na poziomie prawie stałym, mimo dalszego zwiększania napięcia
wejściowego. Podobnie i zmiana prądu obciążenia Iwy kompensowana jest przez element
nieliniowy. Przykładowy proces samoregulacji stabilizatora parametrycznego w tym
przypadku wygląda następująco:
−
w przypadku wzrostu prądu obciążenia Iwy w pierwszej chwili zwiększy się również
prąd wypadkowy pobierany ze źródła,
−
zmniejszy to napięcie wyjściowe Uwy gdyż wzrośnie spadek napięcia na R,
−
spadek napięcia na obciążeniu spowoduje również spadek napięcia na Dz,
−
to z kolei zmniejszy prąd Iz,
−
zmniejszenie prądu Iz spowoduje zmniejszenie prądu wypadkowego i zmniejszenie
spadku napięcia na rezystorze R a w konsekwencji utrzymanie napięcia
wyjściowego Uwy na prawie niezmienionym poziomie.
Stabilizator parametryczny pracuje poprawnie w zakresie określonym przez minimalny
i maksymalny prąd stabilizacji elementu nieliniowego, odpowiednio Izmin i Izmax. Minimalny
prąd stabilizacji określa punkt załamania charakterystyki prądowo-napięciowej (w przypadku
diody Zenera jest to tzw. napięcie Zenera) a prąd maksymalny zależy od mocy rozpraszanej
przez element stabilizujący. Aby zapewnić poprawną pracę stabilizatora zarówno przy
zwiększaniu jak i zmniejszaniu napięcia wejściowego i prądu obciążenia, należy punkt pracy
elementu nieliniowego wybrać na środku pomiędzy Izmin i Izmax. Jeżeli stabilizator pracuje bez
obciążenia wtedy cały prąd układu występuje również w elemencie nieliniowym, dlatego moc
strat elementu stabilizującego musi być odpowiednia.
Spośród wielu parametrów diod stabilizacyjnych, jakie możemy znaleźć w katalogach
najistotniejszymi są:
−
znamionowe napięcie stabilizacji UzN podawane przy znamionowym prądzie IzN i
określonej temperaturze otoczenia (na ogół 25°C). Tolerancja wynikająca z rozrzutu
fabrycznego wynosi zazwyczaj ±5 lub ±10 % wartości UzN ,
−
rezystancja dynamiczna rz nazywana też rezystancją Zenera określana jako stosunek
przyrostu napięcia przy określonej zmianie prądu
rz =
ΔU z
,
ΔI z
85
(4.13)
Zasilanie urządzeń. Laboratorium
−
86
moc strat Pstr jest to maksymalna moc, jaką dioda może oddać do otoczenia bez
niebezpieczeństwa jej uszkodzenia,
−
współczynnik temperaturowy zmiany napięcia Zenera TKUz wyrażony jako stosunek
przyrostu napięcia Zenera w mV na jeden °C (mV/°C).
Rezystancja dynamiczna elementu stabilizacyjnego powinna być jak najmniejsza,
ponieważ decyduje ona o nachyleniu charakterystyki diody w obszarze stabilizacji. W
diodach Zenera rezystancja dynamiczna rz a przez to i napięcie stabilizacji UzN silnie zależą
od temperatury. Termiczny współczynnik zmiany rezystancji dynamicznej wynosi ok. 0,3
%/°C. Rezystancja dynamiczna diody stabilizacyjnej w warunkach statycznych zależna jest
od napięcia stabilizacji (rys. 4.5b), co wiąże się z technologią jej wykonania. Podobnie
termiczny współczynnik zmiany napięcia stabilizacji zależy od napięcia, co uwidoczniono na
rys.4.5a. Należy dodać, że współczynnik termiczny nie jest stały dla danej diody, zależy on
również od aktualnego prądu w diodzie oraz temperatury (rys.4.5b).
a)
b)
Rys. 4.5. Wpływ napięcia stabilizacji na a) współczynnik termiczny zmian napięcia diody; b) rezystancję
dynamiczną ( przy różnych prądach płynących przez diodę)
Schemat zastępczy parametrycznego stabilizatora napięcia z diodą Zenera przedstawia
rys.4.6. Napięcie wyjściowe Uwy układu można określić na podstawie schematu zastępczego z
zależności
U wy = U z N + ΔU w + ΔT ⋅ TKU z + ΔI z ⋅ rz + ΔU dt
gdzie: UzN - znamionowa wartość napięcia stabilizacji,
ΔUw - odchylenie napięcia stabilizacji od wartości znamionowej powstałe
przy produkcji diody,
ΔT- odchylenie temperatury otoczenia diody od znamionowej (25°C),
TKUZ - współczynnik temperaturowy zmian napięcia Zenera,
(4.14)
Ćwiczenie 4. Badanie stabilizatorów napięcia stałego
87
ΔIz - odchylenie prądu diody od wartości znamionowej,
ΔUdt - długoczasowa zmiana napięcia (powodowana np: procesem starzenia...)
Rys.4.6 Schemat zastępczy parametrycznego stabilizatora napięcia z diodą Zenera
Pomijając wpływ zmian temperaturowych i długoczasowych napięcie wyjściowe Uwy
wynosi
U wy = U z N + I z ⋅ rz ,
(4.15)
zaś zmiana napięcia wyjściowego jest równa
ΔU wy = U z N + ΔI z ⋅ rz .
(4.16)
Uwzględniając powyższe założenia napięcie wejściowe stabilizatora można określić z
zależności
U we = ( I z + I wy ) ⋅ R + U z N + I z ⋅ rz
(4.17)
Chcąc zaprojektować stabilizator parametryczny na określoną wartość napięcia
wyjściowe Uwy i prąd obciążenia Iwy należy dobrać odpowiednie napięcie zasilające Uwe oraz
rezystor ograniczający R. W prawidłowo zaprojektowanym stabilizatorze napięcie zasilające
powinno wynosić
U weN = ( 2 ÷ 5) ⋅ U z N
.
(4.18)
Dokładne zależności na określenie tych wielkości są skomplikowane i trudne do
wyprowadzenia. Dla celów praktycznych można skorzystać z zależności uproszczonej
wynikającej z założenia, iż skrajnym przypadkiem dla stabilizatora jest stan jałowy. Przy
nieobciążonym wyjściu cały prąd układu przejmuje dioda Zenera, dlatego rezystor
ograniczający R powinien mieć taką wartość aby prąd Iz nie przekroczył wartości
87
Zasilanie urządzeń. Laboratorium
88
dopuszczalnego prądu diody Izmax. W tym przypadku wartość rezystancji R można obliczyć z
zależności
R=
U we − U z
.
I Z max
(4.19)
Prąd Iz diody Zenera zależy od prądu obciążenia i napięcia zasilającego. Maksymalny
prąd diody Izmax jest określony przez wytwórcę. Jeżeli nie jest podany bezpośrednio, to należy
go wyznaczyć ze wzoru
I zmax =
Pstr
.
U zN
(4.20)
gdzie: Pstr - maksymalna moc strat diody odczytana z katalogu.
Współczynnik stabilizacji napięcia SU stabilizatora parametrycznego obliczony wg.
zależności (4.5) wynosi na ogół 50÷150. Chcąc zwiększyć współczynnik stabilizacji należy
zastosować układ kaskadowy, tzn. szeregowo połączyć dwa (lub więcej) stabilizatory
parametryczne. Napięcie wyjściowe danego układu będzie napięciem wejściowym układu
następnego, a wypadkowy współczynnik stabilizacji będzie iloczynem współczynników
poszczególnych stopni.
Do zalet stabilizatorów parametrycznych należy zaliczyć, małe wymiary i masę, prostą
konstrukcję i dużą niezawodność. Wadami tego rodzaju stabilizacji są stosunkowo mała
wartość współczynnika stabilizacji napięcia wyjściowego, niewielka moc wyjściowa, mała
sprawność i brak możliwości dokładnego zadania napięcia wyjściowego.
Zastosowanie prostych układów stabilizacji parametrycznej jest ograniczone również
możliwością uzyskania stosunkowo niewielkiej mocy na wyjściu. Wynika to bezpośrednio z
zasady działania powyższych układów, mianowicie z faktu, iż wahania napięcia wejściowego
i zmiany prądu obciążenia muszą być skompensowane zmianami prądu w diodzie Zenera.
Zastosowanie wtórnika emiterowego w układzie jak na rys.4.7 umożliwia zwiększenie prądu
wyjściowego, pogarszając tylko w niewielkim stopniu współczynnik stabilizacji całego
układu. Napięcie wyjściowe układu równe jest napięciu UzN na diodzie pomniejszonemu o
spadek napięcia UBE na spolaryzowanym w kierunku przewodzenia złączu baza-emiter
tranzystora T. Spadek napięcia na przewodzącym złączu baza-emiter wynosi ok. 0,6 V i
niewiele zmienia się przy zmianie napięcia wejściowego i prądu obciążenia (co wynika z
charakterystyki UBE=f (IB) tranzystora).
B
U wy = U z N − U BE
(4.21)
Ćwiczenie 4. Badanie stabilizatorów napięcia stałego
89
Rys.. 4.7. Parametryczny stabilizator napięcia z wtórnikiem emiterowym
Kondensator w układzie zastosowany jest dla tłumienia zakłóceń wysokiej
częstotliwości, których źródłem może być dioda Zenera, szczególnie o wyższych napięciach
stabilizacji.
4.1.3.2. Stabilizatory kompensacyjny o pracy ciągłej
Kompensacyjny stabilizator napięcia stanowi układ automatycznej regulacji z
zamkniętą pętlą ujemnego sprzężenia zwrotnego. Moc wyjściowa i sprawność tych
stabilizatorów jest znacznie większa niż stabilizatorów parametrycznych. Stabilizatory
kompensacyjne jednak odznaczają się bardziej skomplikowaną budową, większą masą i
rozmiarami.
Stabilizatory o regulacji ciągłej bywają też nazywane stabilizatorami o działaniu
analogowym. W zależności od sposobu włączenia elementu regulacyjnego (wykonawczego)
w układzie stabilizatora, rozróżniamy stabilizatory szeregowe (element regulacyjny włączony
szeregowo z obciążeniem) i równoległe (element regulacyjny włączony równolegle z
obciążeniem). Najbardziej rozpowszechnionymi – z punktu widzenia sposobu włączenia
elementu regulacyjnego – są układy szeregowe, dlatego zasadę stabilizacji ciągłej
rozpatrzymy na przykładzie takiego właśnie układu, którego schemat blokowy przedstawiono
na rys.4.8.
Stabilizatory kompensacyjne o działaniu ciągłym zawierają element regulacyjny,
którego rezystancja zależy od poziomu sygnału doprowadzonego z układu sterowania.
Najczęściej rolę tego elementu pełni tranzystor w układzie OE sterowany prądem bazy. W
obwodzie ujemnego sprzężenia zwrotnego zachodzi porównanie w komparatorze (części lub
89
Zasilanie urządzeń. Laboratorium
90
całości) napięcia wyjściowego stabilizatora pobieranego z członu pomiarowego (będącego
najczęściej dzielnikiem rezystorowym) z napięciem źródła wzorcowego (referencyjnego).
Rys. 4.8. Schemat blokowy stabilizatora o regulacji ciągłej
Sygnał błędu pojawiający się na wyjściu układu porównującego po wzmocnieniu
przechodzi do układu sterowania. Układ ten oddziałuje na element regulacyjny stabilizatora w
ten
sposób,
że
zachodzi
kompensacja
zaistniałej
zmiany
napięcia
wyjściowego
spowodowanej zmianą napięcia wejściowego lub obciążenia. Przy pracy ciągłej, regulowany
sygnałem sterującym prąd bazy tranzystora wpływa na zmianę rezystancji złącza CE
tranzystora. W efekcie element regulacyjny stabilizatora, pracuje jak rezystancja o
regulowanej wartości. Na elemencie tym występuje spadek napięcia a więc również i mocy co
powoduje wydzielanie ciepła i konieczność zastosowania radiatorów do jego odprowadzania.
Taki rodzaj pracy cechuje się małą sprawnością układu rzędu (30 - 50 %) a zastosowanie
radiatorów zwiększa masę i gabaryty stabilizatora. Stabilizatory o pracy ciągłej zasilane są z
sieci prądu przemiennego przez duży i ciężki transformator sieciowy (50 Hz), co dodatkowo
nie sprzyja wymaganiom współczesnych technologii produkcji związanych z miniaturyzacją.
Regulacja ciągła napięcia ma jednak wiele zalet, dzięki którym jest ona szeroko
stosowana, a mianowicie:
−
stosunkowo prosty układ w porównaniu z układem regulacji impulsowej,
−
najniższy ze wszystkich typów stabilizacji poziom zakłóceń i tętnień napięcia
wyjściowego,
duża szybkość działania.
−
Stabilizatory kompensacyjne o regulacji ciągłej mogą być budowane jako:
−
układy tranzystorowe (wieloelementowe),
Ćwiczenie 4. Badanie stabilizatorów napięcia stałego
−
91
układy zawierające uniwersalny scalony regulator napięcia z ustalonym przez
elementy zewnętrzne lub sposób połączenia napięciem wyjściowym,
−
układy zawierające monolityczny stabilizator na określone przez producenta wartość
napięcia wyjściowego.
Na rysunku 4.9 przedstawiono stabilizator wykonany w oparciu o uniwersalny scalony
regulator napięcia μA 723.
Rys.4.9 Kompensacyjny stabilizator napięcia na układzie μA 723
Regulator μA 723 zawiera w jednej strukturze krzemowej wewnętrzne źródło napięcia
odniesienia (nóżka 5), wzmacniacz błędu (nóżki 4,6,13), wyjściowy tranzystor regulacyjny o
wydajności prądowej 20÷150 mA (nóżki 10,11,13), elementy zabezpieczenia nadprądowego
(nóżki 2,3,13), diodę zabezpieczającą (nóżki 9,10). Źródło napięcia odniesienia tworzy dioda
Zenera skompensowana termicznie i zasilana ze źródła stałoprądowego. Napięcie wyjściowe
źródła napięcia odniesienia wynosi 7,15 V ( na wyj. Uref) a wydajność prądowa 15 mA.
Wzmacniacz błędu jest wzmacniaczem różnicowym zbudowanym z tranzystorów, na
wejścia którego podawane są napięcie odniesienia WE+ (całe lub część) i napięcie wyjściowe
WE− (całe lub część).
Stopień wyjściowy regulacji mocy tworzy tranzystorowy układ Darlingtona składający
się z tranzystora sterującego i wyjściowego T1.
91
Zasilanie urządzeń. Laboratorium
92
Tranzystor zabezpieczenia nadprądowego przy odpowiednim wysterowaniu powoduje
ograniczenie prądu bazy tranzystora sterującego w układzie Darlingtona. Dodatkowa dioda
Zenera w pewnych zastosowaniach może zabezpieczać wyjście układu przed pojawieniem się
zbyt dużego napięcia.
Charakterystyczną cechą wszystkich scalonych uniwersalnych regulatorów napięcia jest
to, że mają one wyprowadzone na zewnątrz istotne punkty obwodu, co umożliwia
użytkownikowi budowę różnych układów stabilizujących o różnych napięciach. W oparciu o
omawiany regulator można budować stabilizatory napięcia od 2 do 37 V. Napięcie wejściowe
układu nie może być mniejsze od 9,5V i większe od 40 V, przy warunku iż różnica między
napięciem wejściowym i wyjściowym zawarta będzie w granicach 3÷38V. Jeżeli chcemy
zbudować stabilizator o prądzie wyjściowym większym od 150 mA to należy zastosować
zewnętrzny tranzystor mocy, w omawianym układzie jest tranzystor BD 647. Zewnętrzny
kondensator C stanowi element kompensacji częstotliwościowej układu.
Ponieważ prezentowany stabilizator ma napięcie wyjściowe większe od napięcia
odniesienia Uref, więc do wzmacniacza błędu doprowadzana jest tylko część napięcia
wyjściowego i całe napięcie odniesienia. W przypadku, gdy napięcie wyjściowe zawiera się
w granicach 2÷7V, wówczas sytuacja jest odwrotna, tzn. całe napięcie wyjściowe podawane
jest do wzmacniacza błędu natomiast napięcie odniesienia jest dzielone przez dzielnik
rezystorowy. Rezystor Rsc polaryzuje złącze baza-emiter tranzystora nadprądowego. Jego
wartość jest tak dobrana, aby przy maksymalnym prądzie wyjściowym spadek napięcia na
nim wynosił ok. 0,6 V. Zabezpieczenie prądowe w omawianym układzie jest układem z
ograniczeniem prądu rys.4.15 charakterystyka a. Regulatory tej klasy, co układ μA723
umożliwiają nie tylko budowę stabilizatorów napięć dodatnich, ale także napięć ujemnych
oraz dławikowych stabilizatorów impulsowych.
Przykład stabilizatora o takich samych parametrach jak poprzednio, lecz wykonanego w
oparciu o monolityczny stabilizator napięcia LM 7812 z ustalonym w czasie produkcji
napięciem wyjściowym przedstawiono na rys.4.10.
Rys.4.10 Kompensacyjny stabilizator napięcia na układzie LM 7812
Ćwiczenie 4. Badanie stabilizatorów napięcia stałego
93
Jest to układ trójkońcówkowy (wejście-masa-wyjście). Wewnętrzna struktura takiego
układu scalonego jest identyczna ze strukturą regulatora. Stabilizator taki nie potrzebuje
żadnych elementów zewnętrznych oprócz kondensatorów filtrujących. Obecnie produkowane
są stabilizatory na napięcia dodatnie i ujemne o wartościach 3,3; 5; 6; 8; 9; 12; 15; 18; 24 i
wydajności prądowej od 0,5 do 3A w zależności od typu obudowy. Zabezpieczenie prądowe
w tym układzie ma przebieg jak charakterystyka b na rys.4.15.
4.1.3.3. Stabilizator kompensacyjny o regulacji impulsowej
Stabilizatory
impulsowe
w
zależności
od
rodzaju
zastosowanego
elementu
gromadzącego energię w polu magnetycznym dzielimy na:
− stabilizatory dławikowe,
− stabilizatory transformatorowe (przetwornice stabilizowane).
Stabilizatory transformatorowe są układami, w których stosuje się transformatory
wysokiej częstotliwości – najczęściej o rdzeniu ferrytowym. W układzie zasilania
wykorzystującym stabilizator transformatorowy napięcie źródła pierwotnego (∼230V/50Hz)
jest prostowane, filtrowane a następnie poprzez impulsator podawane na uzwojenie pierwotne
transformatora w.cz. Napięcie z uzwojenia wtórnego przetransformowane z odpowiednią
przekładnią jest następnie prostowane i filtrowane w celu uzyskania napięcia stałego.
Stabilizatory dławikowe pracują najczęściej w układzie zasilania z konwencjonalnym
prostownikiem zawierającym transformator 50 Hz jak na rys. 4.11.
W zależności od miejsca usytuowania dławika w układzie stabilizatora może on być:
− stabilizatorem obniżającym napięcie,
− stabilizatorem podwyższającym napięcie,
− stabilizatorem odwracającym polaryzację napięcia.
Idea stabilizacji impulsowej, zostanie wyjaśniona na przykładzie stabilizatora
obniżającego napięcie z szeregowo włączonym dławikiem.
93
Zasilanie urządzeń. Laboratorium
94
Rys.4.11 Stabilizator impulsowy a) schemat blokowy układu, b) przebieg napięcia na wyjściu elementu
regulacyjnego
Kompensacyjne stabilizatory napięcia o regulacji impulsowej do regulacji napięcia
wykorzystują element regulacyjny pracujący (dyskretnie) w dwóch skrajnych stanach
ustalonych: w stanie zwarcia i rozwarcia. W stanie zwarcia prąd płynący przez element
regulacyjny jest duży, ale za to napięcie na nim panujące jest małe, natomiast przy rozwarciu
odwrotnie. Tylko w stanie nieustalonym tj. w trakcie przełączania zarówno napięcie jak i prąd
są znaczne, ale czas trwania tego stanu jest bardzo krótki, a tym samym i straty energii
niewielkie. Z tych właśnie powodów element regulacyjny (np: tranzystor) musi mieć dobre
parametry dynamiczne (krótki czas przełączania). Praca impulsowa elementu regulacyjnego
stabilizatora daje możliwość znacznego zmniejszenia mocy traconej, a tym samym
zwiększenia sprawności układu.
W zależności od sposobu sterowania elementu regulacyjnego można wyróżnić układy z
regulacją:
−
czasu trwania ti stanu zamknięcia lub otwarcia elementu regulacyjnego (regulacja
współczynnika wypełnienia PWM),
Ćwiczenie 4. Badanie stabilizatorów napięcia stałego
−
częstotliwości powtarzania impulsów sterujących,
−
fazy impulsów sterujących,
−
amplitudy impulsów sterujących,
−
kilku parametrów jednocześnie.
95
Napięcie z wyjścia prostownika lub filtru prostowniczego jest przekształcane za
pomocą elementu regulacyjnego w ciąg impulsów prostokątnych o dużej częstotliwości
(rys.4.11). Filtr wygładzający LC zmniejsza udział składowej zmiennej w napięciu
prostokątnym przez eliminację kolejnych składowych harmonicznych o częstotliwościach
będących wielokrotnością częstotliwości impulsowania. Po przejściu przez filtr wygładzający
i ograniczeniu składowej zmiennej rośnie udział składowej stałej w napięciu wyjściowym
stabilizatora.
Obwód ujemnego sprzężenia zwrotnego oddziałuje na element regulacyjny w ten
sposób, że wartość średnia napięcia wyjściowego U0wy nie ulega zmianie. Napięcie z wyjścia
lub jego część (analogicznie jak w stabilizatorze kompensacyjnym o działaniu ciągłym)
porównywane jest z napięciem wzorcowym (odniesienia) a sygnał błędu po wzmocnieniu
podawany jest na układ sterujący tranzystora regulacyjnego. Istota stabilizacji napięcia
wyjściowego polega najczęściej na zmianie współczynnika wypełnienia impulsów a więc na
zmianie średniej wartości napięcia wyjściowego.
Przekształcenie napięcia wejściowego w ciąg impulsów prostokątnych odbywa się przy
udziale generatora, który określa stałą częstotliwość impulsowania. O takich stabilizatorach
mówimy, że są sterowane zewnętrznie w sposób płynny przez zmianę współczynnika
wypełnienia impulsów.
Stabilizator impulsowy może pracować także bez tego generatora w przypadku
wykorzystania drgań własnych układu. O takim układzie mówimy, że jest to układ
samowzbudny o regulacji dwupołożeniowej (przekaźnikowy). W przypadku sterowania
zewnętrznego częstotliwość powtarzania impulsów na wyjściu elementu regulacyjnego jest
stała, natomiast w układach samowzbudnych zależy od napięcia zasilającego oraz od pracy
elementu przekaźnikowego (zamiast elementu porównującego), porównującego napięcie
wyjściowe z napięciem wzorcowym.
Samowzbudne stabilizatory napięcia cechują się szybszym działaniem, jednak z
powodu zmieniającej się częstotliwości przełączania utrudniony jest dobór optymalnych
parametrów filtru wygładzającego.
95
Zasilanie urządzeń. Laboratorium
96
Schemat stabilizatora impulsowego obcowzbudnego wykonanego w oparciu o
uniwersalny scalony regulator LM3524 przedstawiono na rys.4.12. Jest to przykład
stabilizatora dławikowego obniżającego napięcie.
Rys.4.12 Impulsowy stabilizator napięcia na układzie LM 3524
Układ scalony tego typu może być stosowany w stabilizatorach impulsowych o
dowolnej biegunowości, w przetwornicach DC/DC o sprzężeniu transformatorowym w
beztransformatorowych powielaczach napięcia a także w układach przekazywania energii.
Wewnątrz układu scalonego (oznaczonego prostokątem z szarym tłem) zawarte są wszystkie
obwody niezbędne do prawidłowej i niezawodnej pracy przeciwsobnej przetwornicy DC/DC.
Układ ma wyjścia przeciwsobne dostarczające sygnałów sterujących o modulacji szerokości
impulsu. Tranzystory sterujące T1 i T2 mają otwarte obwody emitera (nóżki 11 i 14) i
kolektora (nóżki 12 i 13). Ze względu na zbyt mały prąd wyjściowy wewnętrznych
tranzystorów (100mA) sterują one zewnętrznym tranzystorem T3, który zwiększa prąd
obciążenia do 1A. Tranzystory T1 i T2 pracują impulsowo modulując szerokość impulsu w
zakresie od 0 do 90% przy stałej ustalonej przez wewnętrzny generator częstotliwości
impulsu. Częstotliwość generatora układu może być regulowana zewnętrznymi elementami
RT i CT aż do 100kHz. Dioda D1 zamyka obwód prądu w czasie, kiedy element regulacyjny
jest w stanie odcięcia. W tym czasie przepływ prądu w obciążeniu jest podtrzymywany dzięki
energii zgromadzonej w dławiku i kondensatorze wyjściowym C6. Dioda D1, zwana diodą
rozładowczą, to najczęściej szybka dioda Shotkiego. Zabezpieczenie prądowe w tym układzie
ma przebieg jak charakterystyka c na rys.4.15.
Ćwiczenie 4. Badanie stabilizatorów napięcia stałego
97
Przykład stabilizatora impulsowego o takich samych parametrach jak poprzednio, lecz
wykonanego w oparciu o monolityczny stabilizator napięcia LM 2575-12 z ustalonym w
czasie produkcji napięciem wyjściowym, na poziomie 12V, przedstawiono na rys.4.13.
Rys.4.13 Impulsowy stabilizator napięcia na układzie LM 2575-12
Wewnętrzna struktura takiego układu scalonego jest bardzo podobna do struktury
regulatora LM3524. Stabilizator taki nie potrzebuje żadnych elementów zewnętrznych oprócz
kondensatorów filtrujących, dławika i diody rozładowczej. Częstotliwość kluczowania
tranzystora T1, określona przez wewnętrzny generator, wynosi 52kHz. Napięcie z wyjścia
układu podawane jest na wewnętrzny dzielnik napięcia w celu dopasowania do poziomu
napięcia wewnętrznego źródła napięcia odniesienia, którego wartość wynosi 1,23V a dalej na
wzmacniacz błędu i komparator. Układ dodatkowo stwarza możliwość przełączania w stan
czuwania napięciem o poziomie TTL podawanym na nóżkę 8, ma zabezpieczenie
temperaturowe i zabezpieczenie prądowe, które działa zgodnie z charakterystyka d na
rys.4.15.
Stabilizatory kompensacyjne o regulacji impulsowej są coraz częściej stosowane w
zasilaczach ze względu na większą sprawność oraz mniejsze wymiary i masę w porównaniu z
układami analogowymi a więc stabilizatorami parametrycznymi i kompensacyjnymi o
regulacji ciągłej.
Zasilacze zawierające stabilizatory analogowe mają zwykle w swojej strukturze
transformator sieciowy oraz radiator do odprowadzania ciepła z elementu regulacyjnego,
które znacznie zwiększają masę i wymiary zasilacza. Natomiast zasilacze impulsowe nie
muszą zawierać tych elementów a znajdujący się ich strukturze dławik lub transformator są
znacznie mniejsze gdyż pracują przy dużej częstotliwości rzędu dziesiątek kHz.
97
Zasilanie urządzeń. Laboratorium
98
Stabilizatory impulsowe mają jednak i wady, do których można zaliczyć przede
wszystkim duży współczynnik pulsacji napięcia wyjściowego. Pomimo zastosowania filtru
LC w strukturze stabilizatora impulsowego na wyjście układu przedostają się zakłócenia
wynikające z impulsowej pracy elementu regulacyjnego oraz harmoniczne będące
wielokrotnością tej częstotliwości.
4.1.3.4. Źródła napięcia odniesienia i zabezpieczenia nadprądowe
Zasadniczy wpływ na jakość stabilizacji napięcia w stabilizatorze kompensacyjnym ma
źródło napięcia odniesienia, będące wzorcem, z którym porównywane jest napięcie
wyjściowe.
Źródłem napięcia odniesienia stosowanym bardzo często w układach stabilizatorów
napięcia są diody Zenera, kompensowane termicznie. Przy omawianiu stabilizatorów
parametrycznych wspomniano o niekorzystnym wpływie temperatury na napięcie
stabilizowane. Kompensację termiczną można uzyskać łącząc diodę Zenera spolaryzowaną
wstecznie z diodą spolaryzowaną w kierunku przewodzenia. Spadek napięcia na diodzie
krzemowej spolaryzowanej w kierunku przewodzenia wynosi ok. 0.6V, natomiast
współczynnik temperaturowy zmiany tego napięcia jest ujemny i wynosi ok. -2mV/°C.
Łącząc szeregowo spolaryzowaną w kierunku zaporowym diodę Zenera o dodatnim
współczynniku temperaturowym napięcia z jedną lub dwiema diodami prostowniczymi lub
diodami Zenera o ujemnym współczynniku termicznym spolaryzowanymi w kierunku
przewodzenia, można uzyskać bardzo dobrą kompensację termiczną napięć tych elementów
(ok. 0,001%/°C). Kompensację termiczną można również uzyskać łącząc szeregowo diodę
Zenera o napięciu UZ > 6V z diodą o UZ < 6V (rys.4.5a). Zestaw taki będzie miał jednak
rezystancję dynamiczną większą niż dioda Zenera z diodą prostowniczą. Współczynnik
termiczny zmiany napięcia TKUZ zestawu diod zależy od wartości przepływającego przez nie
prądu. Przy pewnym prądzie wartość TKUZ osiąga wyraźne minimum. Do kompensacji
termicznej najlepiej nadają się diody o napięciu Zenera 6÷7 V (rys.4.5a). Diody
kompensowane termicznie produkowane są jako pojedynczy element na napięcie 7÷9 V i
rezystancji dynamicznej w granicach 10÷30Ω.
Aby zwiększyć dopuszczalny prąd obciążenia diody Zenera, zmniejszyć rezystancję
dynamiczną i uzyskać kompensację termiczną napięcia wyjściowego, można zastosować
układ z tranzystorem jak na rys. 4.14.
Ćwiczenie 4. Badanie stabilizatorów napięcia stałego
99
Rys.4.14. Źródło napięcia odniesienia o zwiększonej wydajności prądowej
Prąd diody Zenera wywołuje na rezystorze R spadek napięcia, który po osiągnięciu
wartości równej wartości napięcia przewodzenia złącza baza-emiter tranzystora T ustala się,
ponieważ dalszy przyrost prądu przejmowany jest przez tranzystor. Dioda pracuje więc przy
praktycznie stałym prądzie. Kompensację termiczną uzyskuje się za pomocą zrównoważenia
dodatniego współczynnika termicznego diody ujemnym współczynnikiem temperaturowym
napięcia złącza baza-emiter.
W zasilaczach zbudowanych z elementów półprzewodnikowych nie można stosować
bezpieczników topikowych jako zabezpieczenia przed przeciążeniem lub zwarciem, gdyż
mają zbyt duże czasy reakcji. W zasadzie istnieją cztery możliwości zabezpieczenia
nadprądowego, o charakterystykach przedstawionych na rys.4.15.
Rys.4.15. Rodzaje zabezpieczenia nadprądowego
Pokazane przykładowe przebiegi charakterystyk zabezpieczenia nadprądowego to:
− ograniczenie prądowe z ustawionym prądem granicznym (ang. VCL-variable
current limiting) - charakterystyka c ,
99
Zasilanie urządzeń. Laboratorium
100
− ograniczenie stałoprądowe (ang. CCL-constant current limiting) - charakterystyka a
− ograniczenie
powrotne prądu (ang. FCL-foldback outback current limiting)
charakterystyka b,
− ograniczenie będące kombinacją charakterystyki b i c - charakterystyka d .
Przy charakterystyce c napięcie wyjściowe spada, co prawda po osiągnięciu przez prąd
wartości granicznej, ale prąd zwarcia Icmax jest większy od prądu granicznego. Zasilacze o
charakterystyce a (prostokątnej) mogą być stosowane zarówno jako źródła stałonapięciowe
lub stałoprądowe. Zasilacze o charakterystyce powrotnej b mają prąd zwarcia Ibs znacznie
mniejszy od prądu granicznego a tym samym - mniejszą moc strat.
Wszystkie te zabezpieczenia mają tę wspólną cechę, że po usunięciu przeciążenia układ
wraca do normalnej pracy
4.2. Badania laboratoryjne
4.2.1. Badanie charakterystyk statycznych stabilizatorów napięcia stałego
Badanie wszystkich stabilizatorów przeprowadza się w układzie pomiarowym z
rys.4.16.
Rys. 4.16. Układ pomiarowy do badania stabilizatorów napięcia stałego
Wykaz przyrządów:
Ł1 – łącznik dwubiegunowy,
At – autotransformator sieciowy obniżający napięcie sieciowe,
A01,A02 – amperomierze prądu stałego,
V01,V02 – woltomierze prądu stałego,
VZ2 – woltomierz do pomiaru składowej zmiennej napięcia wyjściowego,
Ro – regulowany rezystor
Ćwiczenie 4. Badanie stabilizatorów napięcia stałego
101
Ze względu na brak zabezpieczenia nadprądowego w stabilizatorze parametrycznym
badając ten układ należy zewnętrzny obwód prądowy podłączyć do zacisku I układu
stabilizatora (rys.4.17) zaś woltomierze do zacisku V.
Rys. 4.17. Układ stabilizatora parametrycznego do badania w ćwiczeniu
4.2.2. Pomiar charakterystyki zmian napięcia wyjściowego w funkcji zmian napięcia
wejściowego
Uwy=f(Uwe) przy Iwy=const
W celu wykonania pomiarów należy połączyć układ pomiarowy w/g rys.4.16. Pokrętło
autotransformatora AT ustawić w położenie 0V a rezystancję Ro ustawić na maksymalną
rezystancję i ustawić maksymalne zakresy pomiarowe na przyrządach. Po włączeniu zasilania
układu łącznikiem Ł1, regulując autotransformatorem zmieniać napięcie na wejściu
stabilizatora (U0we) zachowując stały prąd obciążenia (Iwy) (poprzez regulację Ro). Wyniki
pomiarów wpisać do Tab.1.
Tab. 1.
Iwy =const=……..
Stabilizator……………….
U0we[V]
Pomiary
U0wy [V]
UZwy [mV]
kp [-]
Obliczenia
SU [-]
Opracowanie wyników:
− na podstawie wyników pomiarów obliczyć współczynniki stabilizacji SU (z zależności
4.5) oraz współczynnik pulsacji kp (z zależności 4.2) dla wszystkich badanych układów
i porównać je ze sobą,
101
Zasilanie urządzeń. Laboratorium
102
− na wspólnym wykresie współrzędnych narysować charakterystyki zależności
U0wy=f(U0we) dla wszystkich badanych układów.
4.2.3. Pomiar charakterystyki zmian napięcia wyjściowego w funkcji zmian prądu
obciążenia
Uwy=f(Iwy) przy Uwe=const
Badania stabilizatorów przeprowadzone będą w układzie przedstawionym na rys. 4.16.
W celu wykonania pomiarów należy po przygotowaniu układu do włączenia regulując
autotransformatorem ustawić U0we=20V i utrzymywać przez cały czas pomiarów na stałym
poziomie. W czasie badania należy zmieniać prąd obciążenia Iwy przez regulację rezystancji
obciążenia od maksymalnej aż do zwarcia.
Uwaga! DLA STABILIZATORA PARAMETRYCZNEGO TYLKO DO 1A
Wyniki pomiarów wpisać do Tab. 2.
Uwaga! Wyniki pomiarów a w szczególności napięcie wyjściowe (Uwy) odczytywać
z maksymalną rozdzielczością.
Tab. 2.
Uwe =const=……..
Stabilizator………………………
I0wy [A]
I0we [A]
Pomiary
U0wy [V]
UZwy[mV]
Obliczenia
η[%]
SI [-]
Opracowanie wyników:
− na podstawie wyników pomiarów obliczyć współczynniki stabilizacji SI (z zależności
4.8) oraz sprawność (w/g zależności 4.13) dla wszystkich badanych układów i
porównać je ze sobą,
− na wspólnym wykresie współrzędnych narysować charakterystyki zależności
U0wy=f(I0wy) dla wszystkich badanych układów.