This series presents continuation of Zeszyty Naukowe Politechniki Poznańskiej Elektryka
Editorial Board
prof. dr hab. inż. RYSZARD NAWROWSKI (Chairman), dr hab. inż. JÓZEF LORENC, prof. nadzw.,
dr hab. inż. ZBIGNIEW NADOLNY, dr hab. inż. ANDRZEJ KASIŃSKI, prof. nadzw.
Scientific Secretaries of the Conference ZKwE
dr inż. ANDRZEJ TOMCZEWSKI (Scientific Secretary of the Conference)
mgr DOROTA WARCHALEWSKA-HAUSER (Organising Secretary of the Conference)
Reviewers
KAROL BEDNAREK, KRZYSZTOF BUDNIK, ARKADIUSZ DOBRZYCKI, RYSZARD FRĄCKOWIAK,
MICHAŁ GWÓŹDŹ, PAWEŁ IDZIAK, LESZEK KASPRZYK, MICHAŁ KRYSTKOWIAK, WOJCIECH LIPIŃSKI,
JÓZEF LORENC, WOJCIECH MACHCZYŃSKI, ZBIGNIEW NADOLNY, RYSZARD NAWROWSKI,
WŁADYSŁAW OPYDO, RYSZARD PORADA, ALEKSANDRA RAKOWSKA, KRZYSZTOF SIODŁA,
RADOSŁAW SZCZERBOWSKI, ANDRZEJ TOMCZEWSKI, GRZEGORZ TWARDOSZ, MARIA ZIELIŃSKA
Cover design
PIOTR GOŁĘBNIAK
Edition based on ready-to-print materials submitted by authors
ISSN 1897-0737
Edition I
© Copyright by POZNAN UNIVERSITY OF TECHNOLOGY, Poznan, Poland, 2014
PUBLISHING HOUSE OF POZNAN UNIVERSITY OF TECHNOLOGY
60-965 Poznań, pl. M. Skłodowskiej-Curie 2
tel. +48 61 6653516, fax +48 61 6653583
e-mail: [email protected], www.ed.put.poznan.pl
Sale of the publication:
Poznańska Księgarnia Akademicka
61-138 Poznań, ul. Piotrowo 3
tel. +48 61 6652324; fax +48 61 6652326
e-mail: [email protected], www.politechnik.poznan.pl
Księgarnia Uniwersytetu Ekonomicznego
ul. Powstańców Wielkopolskich 16 61-695 POZNAŃ
tel. +48 61 8543148, faks 61 8543147
e-mail: [email protected]
http://www.ksiegarnia-ue.pl
Press: Binding and duplication in Perfekt Druk
60-321 Poznań, ul. Świerzawska 1
tel. +48 61 8611181-83
CONTENTS
Preface............................................................................................................... 7
1.
Radosław SZCZERBOWSKI
Modelowanie systemów energetycznych ............................................................
9
2.
Jerzy TCHÓRZEWSKI
Modele rozwoju Krajowego Systemu Elektroenergetycznego w ujęciu
teorii sterowania i systemów ..............................................................................
17
3.
Wojciech BĄCHOREK, Janusz BROŻEK
Zastosowanie algorytmu ewolucyjnego w rekonfiguracji sieci
dystrybucyjnej ................................................................................................
27
4.
Janusz BROŻEK, Wojciech BĄCHOREK
Optymalizacja struktur elektroenergetycznych sieci promieniowych ..................
35
5.
Jarosław M. SZYMAŃDA
Identyfikacja propagacji zaburzeń w sieciach elektroenergetycznych .................
43
6.
Piotr PRUSKI, Stefan PASZEK
Obliczenia elektromechanicznych wartości własnych na podstawie
analizy różnych przebiegów zakłóceniowych w systemie
elektroenergetycznym ........................................................................................
51
7.
Andrzej KSIĄŻKIEWICZ
Let-through energy of miniature circuit breaker in function of phase
angle of short-circuit current ..............................................................................
59
8.
Andrzej KSIĄŻKIEWICZ, Jerzy JANISZEWSKI
Electrical contact temperature change after short-circuit current ................................
65
9.
Piotr MILLER, Marek WANCERZ
Wykorzystanie baz danych w aplikacji realizującej obliczanie
nastawień zabezpieczeń pól średniego napięcia ..................................................
71
10. Ryszard FRĄCKOWIAK, Piotr PIECHOCKI
Wartości czasu trwania zwarcia podczas zakłóceń w rozdzielniach
najwyższych napięć w świetle badań symulacyjnych ................................ 81
11. Ryszard NAWROWSKI, Zbigniew STEIN, Maria ZIELIŃSKA
Analiza wartości napięć wyjściowych transformatorów SN/nn
w zależności od charakteru i wartości obciążenia ...............................................
89
12. Bartosz OLEJNIK
Alternatywne
metody
pomiaru
średniego
napięcia
97
w elektroenergetycznej sieci rozdzielczej ...........................................................
4
Contents
13. Ryszard NAWROWSKI, Zbigniew STEIN, Maria ZIELIŃSKA
Analiza wpływu harmonicznych w napięciu na straty mocy w linii NN
zasilającej silnik indukcyjny z kompensacją mocy biernej przy
zastosowaniu kondensatorów ................................................................ 105
14. Artur ADAMOWICZ
Wykorzystanie elektrycznych schematów zastępczych próbek izolacji
celulozowo-olejowej do symulacji charakterystyk napięcia
powrotnego ................................................................................................
113
15. Marek LEPICH
Analiza charakterystyk czasowych prądu depolaryzacji próbek
izolacji aramidowo-olejowej pod kątem oceny wpływu stopnia ich
zestarzenia ...............................................................................................
121
16. Łukasz NAGI, Piotr SCHNEIDER
Wykorzystanie środowiska MATLAB do tworzenia aplikacji i symulacji
wspomagających badania nad wyładowaniami niezupełnymi ................................
129
17. Grzegorz DOMBEK, Zbigniew NADOLNY, Piotr PRZYBYŁEK
Właściwości cieplne nanocieczy elektroizolacyjnych w aspekcie ich
wykorzystania
w
układzie
izolacyjnym
transformatorów
energetycznych ................................................................................................
135
18. Grzegorz MALINOWSKI, Krzysztof SIODŁA
Porównanie programów Maxwell oraz FEMM do symulacji rozkładu
natężenia pola elektrycznego ................................................................ 143
19. Piotr FRĄCZAK
Prąd upływnościowy powierzchniowy izolatora ceramicznego podczas
eksploatacji w ujęciu teorii perkolacji ................................................................
149
20. Filip POLAK, Wojciech SIKORSKI, Krzysztof SIODŁA
Lokalizacja źródeł wyładowań niezupełnych przy użyciu matrycy
157
przetworników ................................................................................................
21. Jerzy JANISZEWSKI, Andrzej KSIĄŻKIEWICZ
Badania modelowe rezystancji zestykowej łączników próżniowych ...................
167
22. Władysław OPYDO, Zdzisław JUSZCZYK
Wpływ rodzaju materiału elektrod, temperatury i gęstości
sześciofluorku siarki na jego wytrzymałość elektryczną ................................
175
23. Arkadiusz DOBRZYCKI
Wpływ wyposażenia komputerowego na parametry energii
elektrycznej w przedsiębiorstwach ................................................................
185
Contents
5
24. Marcin FELINCZAK, Jarosław JAJCZYK
Mikroprocesorowy analizator widma harmonicznych w sieciach
niskiego napięcia ...............................................................................................
193
25. Ryszard PORADA, Adam GULCZYŃSKI
Sterowanie energoelektronicznym źródłem napięcia z zastosowaniem
regulatorów ułamkowych ...........................................................................................
201
26. Ryszard PORADA
Model
częstotliwościowy
układów
energoelektronicznych
z modulacją ................................................................................................
209
27. Seweryn MAZURKIEWICZ, Janusz WALCZAK
Analiza właściwości filtru parametrycznego I rzędu ................................ 217
28. Rafał STĘPIEŃ
Wykorzystanie pakietu testów statystycznych NIST STS 2.1.1 do
testowania sekwencji generatorów DLFSR ........................................................
225
29. Adam TOMASZUK
Microcontroller based step-up DC-DC converter driver with MPPT
algorithm implementation ..................................................................................
233
30. Mikołaj KSIĄŻKIEWICZ
Badania symulacyjne prostownika półsterowanego ................................ 241
31. Mikołaj KSIĄŻKIEWICZ
Badania symulacyjne stabilizatora prądu ............................................................
247
32. Karol BEDNAREK
Poziom niezawodności a wzrost obciążalności systemów zasilania
gwarantowanego (UPS) .....................................................................................
255
Authors index ................................................................................................ 263
PREFACE
The publication includes contents of selected lectures delivered during the
debates of the Conference on Computer Application in Electrical Engineering that
was held in Poznan on April 28-29, 2014.
The Institute of Electrical Engineering and Electronics of the Poznan University
of Technology organized the Conference on Computer Application in Electrical
Engineering for the 19th time. The first Conference was held in 1996 and, since that
time, has been held every year. Total number of 3302 lectures have been published
from 1996 to 2014. During the past eighteenth years about 3500 persons
participated to the Conferences, inclusive of the workers of universities, research
centres, and industry, also from Czech, Germany, Romania and Ukraine.
The Conference is aimed at presenting the applications of existing computer
software and original programs in the field of modelling, simulation,
measurements, graphics, databases, and computer-aided scientific and engineering
works related to electrical engineering.
The following thematic groups are foreseen:
1. ELECTRICAL ENGINEERING
a.
b.
c.
d.
e.
f.
g.
h.
i.
j.
k.
l.
m.
Electromagnetic field, electromagnetic compatibility
Theory of circuits and signals
Bioelectromagnetism
Power engineering, renewable energy
Electronics and power electronics
Electrical engineering of vehicles
Electrical heating
Electrical machines, electrical drive
Materials technology
Mechatronics
Electrical and electronic metrology
Microprocessor technology and control systems
Lighting technology
2. DIDACTICS, EDUCATION AND SCIENTIFIC INFORMATION
Chairman of the Organising Committee ZKwE'2014
Prof. Ryszard Nawrowski, DSc
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Radosław SZCZERBOWSKI*
MODELOWANIE SYSTEMÓW ENERGETYCZNYCH
Jednym z ważniejszych sektorów gospodarki narodowej jest sektor energetyczny. Szereg
zmian zachodzących w tym sektorze uzależnionych jest od wielu czynników nie tylko
technicznych i ekonomicznych, ale także społecznych i politycznych. Polski sektor
energetyczny stoi obecnie przed poważnymi wyzwaniami. Wysokie zapotrzebowanie na
energię finalną, nieadekwatny poziom infrastruktury wytwórczej i przesyłowej, uzależnienie od
zewnętrznych dostaw gazu ziemnego i ropy naftowej oraz zobowiązania w zakresie ochrony
klimatu powodują konieczność podjęcia zdecydowanych działań. W celu realizacji zadań
prawidłowego funkcjonowania systemu energetycznego niezbędnym elementem jest proces
ciągłej obserwacji i przewidywania zmian stanu systemu w różnych horyzontach czasowych.
Złożoność problemów gospodarki paliwami i energią powoduje, że modele komputerowe są
obecnie podstawowym narzędziem dla ich analiz. Żadna decyzja o wprowadzeniu regulacji w
zakresie polityki energetycznej i ekologicznej nie obejdzie się bez wcześniejszych badań
skutków, które można oszacować właśnie za pomocą modeli.
SŁOWA KLUCZOWE: system energetyczny, polityka energetyczna, modele systemów
energetycznych
1. WPROWADZENIE
Od kilku lat temat związany z przyszłością energetyki stanowi jeden z
najważniejszych problemów w polityce krajowej. Obecny stan bezpieczeństwa
energetycznego w poszczególnych sektorach polskiej energetyki jest mocno
zróżnicowany. W elektroenergetyce oraz ciepłownictwie, które oparte są na własnych
zasobach węgla kamiennego i brunatnego, Polska jest samowystarczalna. W sektorze
gazu oraz paliw płynnych, w znacznej mierze uzależniona jest od importu, głównie z
Rosji. Polska posiada spore zasoby energii odnawialnych, lecz ich wykorzystanie jak
dotąd jest niewielkie. W oparciu o bilanse paliwowo-energetyczne konieczne jest
wypracowanie wieloletniej strategii energetycznej, która uwzględni rosnące potrzeby
odbiorców indywidualnych oraz przemysłowych, a jednocześnie zapewni
bezpieczeństwo energetyczne. Dlatego od kilku lat podejmowane są próby określenia
nowego modelu strategii energetycznej, która z jednej strony uwzględniałaby potrzeby
odbiorców, a z drugiej odpowiadałaby na wyzwania stawiane przez Unię Europejską.
Możliwa do zrealizowania strategia energetyczna powinna uwzględniać nasze zasoby
__________________________________________
* Politechnika Poznańska.
10
Radosław Szczerbowski
naturalne, których głównym źródłem jest węgiel oraz w znacznym stopniu zapewniać
dużą samowystarczalność. Możliwe jest także zwiększenie wydobycia gazu z
zasobów krajowych, w tym być może, złóż gazu łupkowego. Ogromne znaczenie
będzie miało także wykorzystanie odnawialnych, jest to tym bardziej istotne, że
zwiększony udział energii odnawialnych w bilansie energetycznym państw
członkowskich popiera Unia Europejska. Coraz częściej rozważa się także budowę
elektrowni jądrowych.
System paliwowo-energetyczny to złożony system zależności występujących
pomiędzy poszczególnymi elementami składowymi. Relacje jakie zachodzą
pomiędzy poszczególnymi podsystemami są głównym kryterium prowadzenia
badań nad prognozowaniem rozwoju systemu energetycznego. Modelowanie
systemów energetycznych jest zadaniem czasochłonnym, wymagającym
interdyscyplinarnej wiedzy (między innymi z zakresu matematyki, informatyki,
energetyki, polityki energetycznej) oraz bardzo dobrej znajomości modelowanego
sektora. Jest to operacja złożona, wymagająca zastosowania odpowiedniej
metodyki postępowania w celu uniknięcia błędów, które mogą się pojawić
praktycznie na każdym etapie budowy [4, 5, 6].
2. METODYKA MODELOWANIA SYSTEMÓW
ENERGETYCZNYCH
Modelowanie rozwoju systemu energetycznego ma istotne ograniczenia. Wraz z
postępem procesów liberalizacji sektorów energetycznych pojawiły się nowe czynniki
determinujące proces wyboru technologii wytwórczych. Ze względu na ryzyko
związane z działalnością na rynku konkurencyjnym inwestorzy zaczęli preferować
technologie z krótkim okresem zwrotu nakładów i krótkim okresem budowy. Na
sektor energetyczny w coraz większym stopniu oddziaływać będzie także polityka w
zakresie ochrony środowiska, w tym konieczność redukcji emisji CO2. Wymusza to
diametralną zmianę w kierunkach rozwoju sektora wytwórczego, zwłaszcza na korzyść
czystych technologii węglowych oraz energii jądrowej, a także na korzyść źródeł
energii odnawialnych (w tym systemów zdecentralizowanych). Wybór przyszłych
technologii będzie uzależniony od wielu czynników. Zestawienie podstawowych cech
technologii wytwórczych przedstawiono w tabeli 1.
Skomplikowany charakter relacji zachodzących w systemach energetycznych
powoduje, że w procesie modelowania systemu niezbędne jest zastosowanie wielu
uproszczeń (rys. 1). Ponadto duży wpływ na wiarygodność prognoz ma materiał
statystyczny, który bardzo często jest niewystarczający. W prognozach energetycznych
stosuje się trzy podstawowe metody modelowania:
ekonometryczną – jest to metoda, która bazuje na statystycznej analizie danych
historycznych i budowie modeli opisujących procesy ekonomiczne dla celów
prognostycznych,
Modelowanie systemów energetycznych
11
optymalizacyjną, która wykorzystuje metody programowania matematycznego
dla ustalenia optymalnej struktury systemu,
symulacyjną, w której system jest przedstawiany za pomocą zbioru formuł
opisujących pojedyncze, wzajemnie powiązane procesy, a prognoza jego rozwoju
jest wyliczana jako wynik współdziałania tych procesów w czasie [15].
Narzędzia analityczne, które tworzone są do badań rozwoju systemów
energetycznych, wykorzystują dwie podstawowe techniki modelowania: bottom-up
i top-down. W modelach bottom-up uwzględnia się zarówno stronę podażową,
czyli pozyskanie nośników energetycznych oraz technologie konwersji, a także
stronę popytową, która charakteryzowana jest przez zapotrzebowanie na
poszczególne rodzaje energii finalnej. Cechą tych modeli jest brak powiązań
systemu energetycznego z resztą gospodarki, natomiast kryterium decyzyjne to
minimalizacja kosztów bezpośrednich. Modele typu top-down, czyli modele
równowagi ogólnej obejmują stronę podażową i popytową. Oparte są na
założeniach idealnego rynku oraz równowagi pomiędzy produkcją i popytem.
Modele te zakładają konieczność uwzględnienia kosztów zewnętrznych w
decyzjach producentów energii, np. koszty emisji [4, 5, 6, 13].
Tabela 1. Zestawienie cech technologii energetycznych [1, 2]
Technologia
CCGT
Elektrownie
węglowe
Elektrownie
jądrowe
Elektrownie
wodne
Elektrownie
wiatrowe
Elektrownie z
silnikami
tłokowymi
Ogniwa
paliwowe
Ogniwa
fotowoltaiczne
Okres
Wielkość
Koszty
Koszty
Koszty
projektowania
jednostki
kapitału/kW operacyjne paliwa
i wdrażania
Średnia
Krótki
Niskie
Niskie
Wysokie
Emisje
CO2
Ryzyko
regulacyjne
Średnia
Niskie
Duża
Długi
Wysokie
Średnia
Średnia
Wysokie
Wysokie
Bardzo
duża
Długi
Wysokie
Średnia
Niskie
Brak
Wysokie
Duża
Długi
Bardzo
wysokie
Brak
Brak
Wysokie
Mała
Krótki
Wysokie
Bardzo
niskie
Bardzo
niskie
Brak
Brak
Średnia
Mała
Bardzo
krótki
Niskie
Niskie
Wysokie
Średnia
Średnia
Bardzo
krótki
Bardzo
krótki
Bardzo
wysokie
Bardzo
wysokie
Średnia
Wysokie
Średnia
Niskie
Bardzo
niskie
Brak
Brak
Niskie
Mała
Bardzo
mała
Modele służące do prognozowania rozwoju systemów
energetycznych można podzielić na:
modele systemów energetycznych,
modele energetyczno-ekonomiczne,
zintegrowane modele energetyczno-ekonomiczno-środowiskowe.
paliwowo-
12
Radosław Szczerbowski
Modele systemów energetycznych wykorzystują podejście inżynierskie
(bottom-up), gdzie nie ma potrzeby analizowania zachowań pozostałych rynków
nie związanych z produkcją energii. W związku z tym niezbędne dane o popycie na
pierwotne nośniki energii oraz energię finalną pochodzi z prognoz
makroekonomicznych. W modelach systemów energetycznych paliwa konkurują
ze sobą na rynku dostaw energii pierwotnej, a technologie produkcyjne w zakresie
ich przetwarzania. Najważniejsze zmienne modelu to: wielkość zużycia
pierwotnych nośników energetycznych, wielkość produkcji energii elektrycznej i
ciepła, poziom nakładów inwestycyjnych, emisja zanieczyszczeń gazowych itp. Do
najbardziej znanych modeli tego typu należą MARKAL i MESSAGE.
Rys. 1. Schemat ideowy modelu strategii rozwoju systemu energetycznego,
(opracowanie własne)
Modele energetyczno-ekonomiczne, wykorzystywane są do analizy powiązań
systemu energetycznego z gospodarką. Są to modele makroekonomiczne,
posiadające bardziej rozbudowaną, w stosunku do poprzednich, strukturę
zależności ekonomicznych. Modele te wykorzystują tzw. podejście top-down,
oparte są na teorii równowagi ogólnej. Określają one stronę podażową i popytową
zależnościami rynkowymi. Przykładami modeli wykorzystanymi w badaniach nad
sektorami energetycznymi są: GLOBAL 2100, GREEN, Dynamic General
Equilibrium Model i PRIMES.
Zintegrowane modele energetyczno-ekonomiczno-środowiskowe, łączą kilka
wyspecjalizowanych i uzupełniających się wzajemnie modeli, ze względu na
Modelowanie systemów energetycznych
13
wielopłaszczyznowy charakter analizy. W badaniach tego typu dąży się zatem do
szczegółowego odwzorowania istotnych relacji technologicznych, ekonomicznych i
środowiskowych, a z uwagi na trudności obliczeniowe nie dokonuje się tego w jednym
modelu, lecz poprzez zastosowanie wcześniej stworzonych narzędzi [4, 5, 6, 13].
3. CHARAKTERYSTYKA WYBRANYCH MODELI
Model MARKAL (MARKet ALlocation) jest narzędziem wykorzystanym do
programowania modeli rozwoju systemów energetycznych, ze szczególnym
uwzględnieniem struktury wytwórczej, na podstawie bilansu energii [3]. Model
MARKAL pozwala na rozwiązywanie problemów programowania liniowego
opartych na minimalizacji zaktualizowanej wartości netto kosztów dostawy energii do
odbiorcy końcowego. Zmiennymi decyzyjnymi są m.in.: wielkość mocy
zainstalowanej i wielkość rocznej produkcji w technologiach przetwarzania różnych
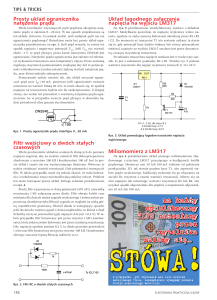
form energii. Schemat ideowy struktury danych wejściowych i rezultatów
uzyskiwanych za pomocą modelu MARKAL przedstawiono na rys. 2. Kryterium
optymalizacji zastosowane w modelu MARKAL jest minimalizacja zdyskontowanej
sumy zaktualizowanej wartości strumienia kosztów rocznych, generowanych przez
system energetyczny we wszystkich latach horyzontu czasowego.
Rys. 2. Schemat ideowy struktury modelu budowanego za pomocą pakietu MARKAL [3]
Model POLES należy do grupy pięciu globalnych modeli typu energia –
ekologia – ekonomika (3E). Model ułatwia jednoczesną ocenę opcji popytowych i
podażowych przy różnych ograniczeniach, w szczególności obejmujących
dostępność zasobów i cele emisyjne. Model „POLES” uwzględnia dwa
podstawowe czynniki, warunkujące zapotrzebowanie energii: potencjał
demograficzny i przyrost PKB na mieszkańca [7, 13].
Model LEAP (The Long-range Energy Alternatives Planning System), to
rozwinięte przez Stockholm Environment Institute wykorzystywane narzędzie do
analizy polityki energetycznej. Służy do zintegrowanego planowania energetycznego
14
Radosław Szczerbowski
oraz analizy zmian klimatycznych. Jest użytkowany w wielu różnych skalach, od miast
i regionów, do zastosowań krajowych czy kontynentalnych, uwzględniając problem
emisji. W programie LEAP nie zaimplementowano modelu konkretnego systemu
energetycznego, lecz stanowi on narzędzie, które można stosować do tworzenia modeli
różnych systemów energetycznych. LEAP umożliwia korzystanie także z szeregu
opcjonalnych wyspecjalizowanych metod modelowania obejmujących na przykład
zużycie energii (paliw) w sektorze transportu, czy obciążenia systemu
elektroenergetycznego. LEAP oferuje szereg metod symulacji, które są wystarczające
do modelowania sektora wytwarzania energii elektrycznej i planowania rozbudowy
jego zdolności produkcyjnych [8, 9].
Model EnergyPLAN jest modelem komputerowym przeznaczonym do analizy
systemów energetycznych. Jest to model deterministyczny, który optymalizuje działanie
danego systemu energetycznego na podstawie danych wejściowych i wyjściowych,
określonych przez użytkownika. Głównym celem modelu jest pomoc w projektowaniu
krajowych lub regionalnych strategii planowania energetycznego na podstawie analiz
technicznych i ekonomicznych skutków realizacji różnych systemów energetycznych i
inwestycji. Model obejmuje cały krajowy lub regionalny system energetyczny, w tym
produkcji ciepła i elektryczności, a także transport i przemysł [10].
Model MAED ocenia przyszłe zapotrzebowanie na energię w oparciu o średnio-i
długoterminowe scenariusze rozwoju społeczno-gospodarczego, technologicznego i
demograficznego. Zapotrzebowanie na energię w tym modelu dzieli się na dużą liczbę
kategorii użytkowników końcowych, odpowiadających różnym usługom, w różnych
sektorach. Szacowane są czynniki społeczne, ekonomiczne i technologiczne z danego
scenariusza i połączone dają ogólny obraz przyszłego wzrostu zapotrzebowania na
energię. MAED wykorzystuje makra programu Excel [11]. Model ten został
wykorzystany przy opracowaniu Prognozy zapotrzebowania na paliwa i energię do
2030 roku, Załącznik 2 do projektu „Polityki energetycznej Polski do 2030 roku”.
Model optymalizacyjny MESSAGE pozwala na wyznaczenie prognozy
zapotrzebowania na energię elektryczną i ciepło sieciowe oraz prognozy rozwoju
źródeł wytwarzania w skali kraju. Zasada działania modelu MESSAGE opiera się na
minimalizacji sumarycznych zdyskontowanych kosztów systemowych w całym
rozpatrywanym przedziale czasowym, wykorzystując metody programowania
liniowego. MESSAGE umożliwia budowę modelu systemu energetycznego o
praktycznie dowolnej złożoności, zawierającego technologie wytwarzania i przesyłu
paliw i energii, uwzględniającego większość ograniczeń technicznych i
środowiskowych występujących w rzeczywistym systemie. Daje to szerokie
możliwości symulacji zachowania systemu w różnych warunkach oraz badania
wpływu poszczególnych czynników na dobór optymalnej struktury technologii
[10,12]. Wiele elementów tego modelu zostało wykorzystanych podczas tworzenia
„Modelu optymalnego miksu energetycznego dla Polski do roku 2060”.
Model PRIMES symuluje rozwiązania dla rynkowej równowagi podaży i
popytu. Algorytmy modelu poszukują cen dla każdej postaci energii, przy których
Modelowanie systemów energetycznych
15
ilościowe zapotrzebowanie konsumenta jest najlepiej zaspokajane przez ilościową
ofertę producentów. Model oddaje zachowania uczestników rynku oraz
wykorzystuje dostępne technologie popytowe i podażowe oraz technologie
ograniczania emisji. Model wyróżnia podsystemy podażowe (produktów
ropopochodnych, gazu, węgla, energii elektrycznej, ciepła i pozostałe) oraz sektory
użytkowania końcowego (mieszkalnictwo, usługi, transport, dziewięć sektorów
przemysłu), przy czym możliwe jest łączenie funkcji producenta i konsumenta (na
przykład w procesach kogeneracyjnych) [14].
4. WNIOSKI
Jednym z warunków zapewnienia bezpieczeństwa dostawy energii elektrycznej do
odbiorców jest utrzymywanie równowagi między zapotrzebowaniem na energię
elektryczną i moc szczytową a dostępnością mocy wytwórczych w Krajowym
Systemie Energetycznym (KSE). Porównanie obecnego stanu i struktury mocy źródeł
wytwórczych w KSE oraz zapotrzebowania na energię elektryczną i moc szczytową, a
także przewidywanego w najbliższych latach jego wzrostu, wskazuje, że w polskiej
elektroenergetyce pilnie są potrzebne nowe inwestycje źródeł wytwórczych. Wybór
technologii dla nowych źródeł wytwórczych w długiej perspektywie czasowej musi
być jednak oparty tylko na kryterium ekonomicznym, którego podstawą jest
znajomość przewidywanych, całkowitych kosztów wytwarzania energii elektrycznej,
łącznie z kosztami środowiskowymi.
Dochodzenie do odpowiedniego modelu energetyki będzie długim i trudnym
procesem. Obecnie niezbędne jest podejmowanie działań zabezpieczających
bezpieczeństwo energetyczne Polski w zakresie niezakłóconych dostaw
tradycyjnych nośników energii, głownie gazu i ropy naftowej poprzez ich
dywersyfikację. Perspektywa deficytu energii powoduje, że już dziś trzeba się
zastanawiać, czy i co budować. Wydaje się, że w obecnej sytuacji trzeba stawiać
na górnictwo węgla kamiennego i brunatnego, a także na odnawialne źródła
energii i na energetykę jądrową - bowiem każda forma energii będzie w naszym
systemie energetycznym coraz bardziej potrzebna.
LITERATURA
[1]
[2]
[3]
[4]
Projected Cost of Generating Electricity 2005, OECD PUBLICATIONS.
Projected Costs of Generating Electricity 2010, OECD PUBLICATIONS.
Jaskólski M., Application of MARKAL model tooptimisation of electricity
generation structure in Poland in the long-term time horizon Part I– concept of the
model, Acta Energetica 3/12 (2012), str. 15-20.
Kudełko M., Znaczenie analizy systemowej w prognozowaniu rozwoju sektorów
paliwowo-energetycznych. Polski. Polityka Energetyczna tom 8, z. specjalny. Wyd.
Instytutu GSMiE PAN, s. 245-260, Kraków 2005.
16
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
Radosław Szczerbowski
Kamiński J., Modelowanie systemów energetycznych - ogólna metodyka budowy
modeli. Polityka Energetyczna tom 13, z. 2. Wyd. Instytutu GSMiE PAN, s. 219 226. Kraków 2010.
Popławski T., Problematyka budowy modelu długoterminowej prognozy
zapotrzebowania na energię elektryczną dla Polski. Polityka Energetyczna tom 15,
z. 3. Wyd. Instytutu GSMiE PAN, s. 293 – 304, Kraków 2012.
Malko J., Model „POLES” – ocena transformacji energetyki XXI wieku, Polityka
Energetyczna tom 14, z. 1, Wyd. Instytutu GSMiE PAN, s. 107-121, Kraków 2011.
http://www.regna.eu
http://www.energycommunity.org
http://www.energyplan.eu
Model For Analysis Of Energy Demand (MAED-2), IAEA, Vienna, 2006.
http://webarchive.iiasa.ac.at/Research/ENE/model/message.html
Kamiński J., Liberalizacja rynku energii elektrycznej a zużycie węgla w sektorze
elektroenergetycznym - ujęcie modelowe. Polityka Energetyczna tom 10, z. 2. Wyd.
Instytutu GSMiE PAN, s. 253-275, Kraków 2007.
Capros P. The PRIMES Energy System Model, National Technical University of
Athens, 2008.
Suwała W., Problemy budowy i wykorzystania modeli komputerowych w
gospodarce paliwami i energią. Polityka Energetyczna tom 16, z. 3. Wyd. Instytutu
GSMiE PAN, s. 47 – 58, Kraków 2013.
MODELING OF ENERGY SYSTEMS
One of the most important sectors of the national economy is the energy sector. A
number of changes occurring in this sector are dependent on factors not only related to
technology and the economy, but also on social and political conditions. The Polish energy
sector faces serious challenges at the moment. The high demand for final energy, the in
adequate level of production and transfer infrastructure, the dependence on external gas and
crude oil supplies, and the requirements to comply with climate and environmental
protection mandates make it necessary to take serious actions. In order to achieve a
correctly functioning energy system, a crucial element is to monitor and forecast instant
changes in the state of the system over different time horizons. The complexity of fuels and
energy systems development makes mathematical modeling the basic tool for their
analyses. Decisions on energy or environmental policy regulation are always preceded by
impact assessment, which is an analysis performed using a variety of models.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Jerzy TCHÓRZEWSKI*
MODELE ROZWOJU KRAJOWEGO SYSTEMU
ELEKTROENERGETYCZNEGO W UJĘCIU TEORII
STEROWANIA I SYSTEMÓW
Do identyfikacji Krajowego Systemu Elektroenergetycznego (KSE) wykorzystano
podstawy teorii sterowania i systemów oraz teorii identyfikacji rozwoju systemów, co
umożliwiło wygenerowanie odpowiednich modeli rozwoju, w tym modeli
matematycznych rozwoju w postaci macierzy th oraz równań w przestrzeni stanów (ss).
Następnie na tej podstawie opracowano systemowy model rozwoju KSE, który
zaimplementowano w Simulink’u, definiując kolejne bloki modelu jako charakterystyki
poszczególnych podsystemów KSE, zidentyfikowanych w środowisku MATLAB z
wykorzystaniem System Identification Toolboxa oraz transformowanych na postać modeli
w przestrzeni stanów za pomocą Control System Toolboxa. W wyniku rozwiązania układu
równań zmiennych stanu z wykorzystaniem m-pliku w środowisku MATLAB otrzymano
trzy zmienne stanu. Następnie na bazie otrzymanego rozwiązania uzyskano w Simulinku
odpowiedzi systemu KSE (zmiennej wyjściowej y1) na wymuszenia typu: skok
jednostkowy 1(θ), impuls Diraca δ(θ) oraz funkcja sin(θ). Wyniki badań zinterpretowano.
SŁOWA KLUCZOWE: identyfikacja, modele rozwoju,
systemu elektroenergetycznego, MATLAB i Simulink
przestrzeń stanów, rozwój
1. WPROWADZENIE
Przeprowadzenie identyfikacji krajowego systemu elektroenergetycznego
(KSE) jest zadaniem bardzo czasochłonnym, wymaga dokładnych badań
statystycznych w celu zgromadzenia odpowiednich danych możliwych do
wykorzystania w procesie identyfikacji dotyczących reprezentatywnego okresu,
np. lat 1946-20071[11, 13]. Tak przeprowadzona identyfikacja KSE, umożliwia
uwzględnienie w modelu rozwoju zarówno zmian parametrycznych jak też zmian
strukturalnych KSE.
1
Dobór danych liczbowych dotyczących lat 1946-2007 wynikał z faktu, iż badania zostały zakończone w 2008
roku, gdy nie były jeszcze znane wyniki za 2008 rok, natomiast dobór roku 1946 wynikał z faktu, iż dane za
wcześniejszy okres (lata wojny 1939-1945 i lata przedwojenne) nie były w pełni dostępne. Przyjęcie danych w
liczbie 61 lat uznałem za próbkę reprezentatywną, gdyż umożliwiła ona wygenerowanie 33 modeli krajowego
systemu elektroenergetycznego z wysoką dokładnością (99,14%) w systemie kroczącym.
__________________________________________
* Uniwersytet Przyrodniczo-Humanistyczny w Siedlcach.
18
Jerzy Tchórzewski
2. MODEL KSE W PRZESTRZENI STANÓW
Przykład modelu rozwoju KSE otrzymany na bazie danych eksperymentalnych
z lat 1946-2007 dla 14 zmiennych wejściowych oraz jednego wyjścia y1
reprezentującego moc osiągalną w elektrowniach ogółem [MW] (model MISO) 2 w
przestrzeni stanów można zapisać równaniami stanu i wyjścia [11, 13, 16-18]:
x
1 0 ,13
x 0
2
x 3 0
0 ,34
0 ,05
0 ,14
1
0
0
0 x1
1 x 2
0 x 3
0, 2
0 ,78
5,19
0 ,37
14 ,5
9 ,72
0 ,16
0 ,05
0, 01
0 ,03
0 ,05
0 ,28
0 , 003
0 ,01
0 ,03
0 ,11
0 ,09
0 ,3
0 ,13
0 ,06
0 ,02
0 ,01
0 ,03
0 .13
0 ,33
29 ,52
14 ,17
0 ,07
0, 01
0 ,61
0 ,03
0 , 03
0 ,15
0 ,05
0 ,01
0 , 23
0 ,02 u 1
0 ,32 u 2 (1)
0 ,03 u 3
0 ,1342
0 ,
0
y 1 1 0
0 ,
gdzie: x1 – zmienna stanu możliwa do interpretacji jako możliwa do wyprodukowania
energia elektryczna w elektrowniach (ogółem) [kWh], x2 - zmienna stanu możliwa do
interpretacji jako moc osiągalna generatorów [MW], x3 – zmienna stanu możliwa do
interpretacji jako szybkość zmian mocy osiągalnej generatorów w ciągu roku
[MW/rok].
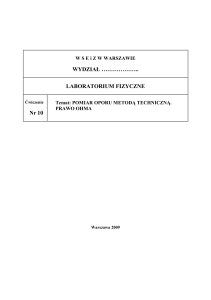
Szczegółowy schemat blokowy zmiennych stanu utworzony na podstawie
równań stanu i wyjścia (1) zamieszczono na rys. 1. Rozwiązanie układu równań
zmiennych stanu (1) wiąże się z koniecznością wyznaczenia dwóch składowych
[1, 4, 5,16-19]:
składowej swobodnej zależnej od warunków początkowych:
xs e A x (0),
( 2)
składowej wymuszonej:
xw e A ( ) B u ( ) d ,
(3)
0
co wiąże się na początku z koniecznością wyznaczenia macierzy podstawowej
(macierzy tranzycyjnej) przy wykorzystaniu odwrotnej transformaty Laplace’a
e A L -1 ([s 1 A]1 ),
(4)
przy czym:
s 0.13 1 0
[ s 1 A ] 0
s 1 ,
0
0
s
2
MISO – Multi Input Single Output
(5)
Modele rozwoju Krajowego Systemu Elektroenergetycznego w ujęciu teorii …
19
Rys. 1. Schemat blokowy zmiennych stanu modelu rozwoju KSE dla lat 1946-2007.
Oznaczenia w tekście. Opracowanie własne
dla której wyznacznik wynosi:
det( s1 A) s 2 ( s 0.13),
(6)
a więc
s 1 A1
1
A TD ,
det( s 1 A )
(7)
gdzie ADT jest transponowaną macierzą dopełnień.
W konsekwencji przekształceń otrzymano:
s 2
1
[ s 1 A ]1 2
0
s ( s 0.13)
0
oraz
s ( s 0.13)
s 0.13 ,
0
s ( s 0.13)
s
1
(8)
20
Jerzy Tchórzewski
e A
0.13
e
-1
1
L ([ s 1 A] ) 0
0
1
(e 0.13 1( ))
0.13
1( )
0
1
1 0.13
(
e
)
0.13 0.13
,
1( )
(9)
a zatem:
Xkse e A
0.13
e
B u ( ) 0
0
1
(e0.13 ) 1( ))
0. 13
1( )
0
1
1 0.13 )
(
e
)
0.13 0.13
1( )
u1
u
2
u3
u4
u5
u
0,01 0, 05 0,01 0, 03 0,09 0,13
0,06 0,03 0,02 6
0,34 0, 20 5,19 14,51 0,16
u
0, 05 0,78 0,37
9,72 0,05 0,03 0, 28 0,01 0,11 0,30 0,06 0,01 0.13 0,30 7 (10)
u8
0,14 0,33 29,52 14,17
0,07
0,01 0,61 0,03 0,03 0,15 0,05 0,01 0, 23
0,03
u
9
u10
u11
u12
u13
u14
oraz
Ykse 1 C Xkse 1 0
0 Xkse.
(11)
Wyniki otrzymanych w Simulinku odpowiedzi systemu KSE (zmiennej wyjściowej
y1) na wymuszenia typu: skok jednostkowy 1(θ), impuls Diraca δ(θ) oraz funkcja
sin(θ) [4, 5, 8, 14, 16, 19] zestawiono w tabeli 1, przy czym rozwiązaniem układu
równań zmiennych stanu są 3 następująco wyrażone zmienne stanu:
x1 (7.6736 e 0.1342 1.0753 0.4024 1( )) u1 (12.1333 e 0.1342 2.4322 5.7735 1( )) u 2
(1637.7976 e 0.1342 220.003 2.7444 1( )) u 3 (845.1465 e 0.1342 105.5932 72 .3957 1( )) u 4
(3.5398 e 0.1342 0.5067 0.3994 1( )) u 5 (0.4358 e 0.1342 0.0499 0,0499 1( )) u 6
(12)
(36.0245 e 0.1342 4.5485 0.0523 1( )) u 7 (0.0889 e 0.1342 0.1967 0.0551 1( )) u 8
(2.4298 e 0.1342 0.2147 0.7996 1( )) u 9 (10.8674 e 0.1342 1.1483 2.2179 1( )) u10
(2.0381 e 0.1342 0.3532 0,4642 1( )) u11 (0.5923 e 0.1342 0,715 0.0745 1( )) u12
(1,2001 e 0.1342 0.0745 0.0715 1( )) u13 (1.5974 e 0.1342 0,1982 0.1416 1( )) u14 0.1342,
x 2 (0.1443 0.0539 1( )) u1 (0.3264 0.7748 1( )) u 2 29.5244 0.3683 1( )) u 3
(14.1706 9.7155 1( )) u 4 (0.068 0.0528 1( )) u 5 (0.0067 0.0275 1( )) u 6
( 0.6104 0.2766 1( )) u 7 (0.0264 0.0074 1( )) u 8 ( 0.0288 0.1073 1( )) u 9
(0.1541 0.2976 1( )) u10 ( 0.0474 0.0623 1( )) u11 (0.0096 0.01 1( )) u12
(0.2337 0.1287 1( )) u13 (0.0266 0.3011 1( )) u14 ,
(13)
Modele rozwoju Krajowego Systemu Elektroenergetycznego w ujęciu teorii …
21
x3 1( ) ( 0.1443 u1 0.3264 u 2 29.5244 u 3 14.1706 u 4 0.068 u 5 0.0067 u 6 0.6104 u 7
0.0264 u 8 0. 0288 u 9 0. 1541 u10 0.0474 u11 0.0096 u12 0.2337 u13 0.0266 u14 ),
(14)
oraz zmienna wyjściowa:
y1 c11 x1 (7.6736 e 0.1342 1.0753 0.4024 1( )) u1 (12.1333 e 0.1342 2.4322 5.7735 1( )) u 2
(1637.7976 e 0.1342 220.003 2.7444 1( )) u 3 (845.1465 e 0.1342 105.5932 72.3957 1( )) u 4
(3.5398 e 0.1342 0.5067 0.3994 1( )) u 5 (0.4358 e 0.1342 0.0499 0,0499 1( )) u 6
(15)
( 36.0245 e 0.1342 4.5485 0.0523 1( )) u 7 (0.0889 e 0.1342 0.1967 0.0551 1( )) u 8
( 2.4298 e 0.1342 0.2147 0.7996 1( )) u 9 (10.8674 e 0.1342 1.1483 2.2179 1( )) u10
( 2.0381 e 0.1342 0.3532 0,4642 1( )) u11 ( 0.5923 e 0.1342 0,715 0.0745 1( )) u12
(1,2001 e 0.1342 0.0745 0.0715 1( )) u13 (1.5974 e 0.1342 0,1982 0.1416 1( )) u14 0.1342.
3. ANALIZA MODELI ROZWOJU KSE
1)
W przypadku wymuszenia [4, 5, 14, 16, 19]:
sinusoidalnego, tzn. gdy u1-u14 = sinθ (dla ω = 1) zmienne stanu można
wyrazić następująco:
x1 (k11 e s3 k12 k13 1( )) sin 0.1342,
x2 ( k 22 k 23 1( )) sin ,
x3 k 33 1( )) sin ,
2)
przy czym: s3 = 0.1342, k11 = 2 484,2353, k12 = 107,58, k13 = -72,2246,
k22 = k33 = 43,6964, k23 = 8,9252,
czyli zmienna stanu x1, a więc także zmienna wyjściowa y1 mają przebiegi
wynikające z 3 składowych: składowej ekspotencjalnej (k11·es3·θ), składowej
prostoliniowej k12·θ oraz składowej skoku jednostkowego o wartości k13
(odpowiednio zmienne stanu: x2 oraz x3),
skoku jednostkowego, tzn. gdy u1-u14=1(θ) zmienne stanu wynoszą:
x1 (k11 e s k12 k13 1( )) 1( ),
x2 (k 22 k 23 1( )) 1( ),
(17)
x1 (k 33 1( )) 1( ),
impulsu Diraca, tzn. gdy u1-u14=δ(θ) zmienne stanu wynoszą:
x1 (k11 e s k12 k13 1( )) ( ),
x2 (k 22 k 23 1( )) ( ),
(18)
x1 (k 33 1( )) ( ).
3
3)
(16)
3
22
Jerzy Tchórzewski
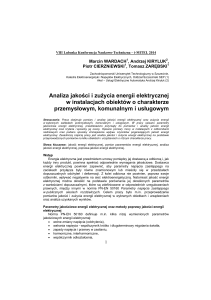
Przebiegi zmiennych stanu: x1, x2 i x3 występujących w modelu KSE (6.16)
otrzymanych w środowisku MATLABA w wyniku rozwiązania układu równań
zmiennych stanu w czasie θ3 zamieszczono na Rys. 2 [16].
Rys. 2. Przebiegi zmiennych stanu modelu ciągłego (ss133) systemu KSE opisanego równaniami
zmiennych stanu (1) na wymuszenie sin(t): a) wyniki w skali dla θ = 0 - 62 lat, b) wyniki w skali
dla θ = 0 - 30 lat. Oznaczenia: oś y: x1 – energia elektryczna możliwa do wyprodukowania w ciągu
roku [kWh], x2 – prognozowana moc generatorów w ciągu roku [MW], x3 – szybkość zmian
prognozowanej mocy generatorów w ciągu roku [MW/rok], oś x – czas długi (θ) [lata]. Opracowanie
własne w MATLABIE
Szczegółowe przebiegi poszczególnych zmiennych stanu na wymuszenie sin(t)
zamieszczono na rys. 3-5.
Rozwiązywanie w czasie układu równań zmiennych stanu w MATLABIE przy wykorzystaniu funkcji ode45:
function xprim=kse1(tkse,xkse)
u=[sin(tkse);sin(tkse);sin(tkse);sin(tkse);sin(tkse);sin(tkse);sin(tkse);sin(tkse);sin(tkse);sin(tkse);sin(tkse);sin(tkse);sin(tkse);sin(t
kse);];
A=[0.1342 1 0; 0 0 1; 0 0 0];
B=[0.343013563367551, -0.196466073063211, -5.19121774603053,-14.5048469093668, 0.155364926402085,
0.0133508185876721, 0.0523419760633733, -0.00271779072167615, -0.0301527090971463, 0.0884092203462071,
0.130991507592293, 0.0154625644988539, -0.0285731557112965, -0.0219814655744797;
-0.0538712635106949, -0.774791061746606, 0.368263066405472, 9.71549145728839, -0.0529259182073755,
0.0275476833477622, -0.276563635485946, -0.00740840299183130, 0.107301367048242, 0.297567075473233,
0.0623074556509041, -0.00996107830542531, -0.128658322480848, 0.301927808385236;
-0.144334900395375, 0.326373209014219, 29.5243564724218, 14.1705518163727, 0.0680336110776643,
0.00673903539076534, -0.610373279646815, 0.0263927369801369, -0.0288269565794885, 0.154056578872873, 0.0473553534880257,-0.00960802128595807, 0.233658739059553, 0.0265544975310566;];
xprim=A*xkse+B*u;
end
Xkse0=[0;0;0;0];tkse0=0; tksee=61; [tkse,xkse]=ode45('kse1',[tkse0,tkkse],Xkse0); plot(tkse,xkse(:,1),'-', tkse,xkse(:,2),'.',
tkse,xkse(:,3),'*'); plot(tkse,xkse(:,1));
3
Modele rozwoju Krajowego Systemu Elektroenergetycznego w ujęciu teorii …
23
Rys. 3. Przebieg zmiennej stanu x1 (energia elektryczna możliwa do wyprodukowania w ciągu roku)
występującej w modelu ciągłym (ss133) systemu KSE przy wymuszeniu u = sin(θ) - wyniki dla θ = 0
- 62 lat. Oznaczenia: oś y: x1 – energia elektryczna możliwa do wyprodukowania w ciągu roku
[kWh], oś x – czas długi (θ) [lata]. Opracowanie własne w MATLABIE
Rys. 4. Przebieg zmiennej stanu x2 (prognozowana moc generatorów w ciągu roku [MW])
występującej w modelu ciągłym (ss133) systemu KSE przy wymuszeniu u = sin(θ). Oznaczenia: oś y:
x1 – prognozowana moc generatorów w ciągu roku [MW], oś x – czas długi (θ) [lata]. Opracowanie
własne w MATLABIE
Rys. 5. Przebieg zmiennej stanu x3 (szybkość zmian prognozowanej mocy osiągalnej w ciągu roku)
występującej w modelu ciągłym (ss133) systemu KSE na wymuszenie u = sin(θ) - wyniki dla θ = 0 62 lat. Oznaczenia: oś y: x3 – szybkość zmian mocy osiągalnej generatorów w ciągu roku [MW/rok],
oś x – czas długi (θ) [lata]. Opracowanie własne w MATLABIE
24
Jerzy Tchórzewski
4. DALSZE KIERUNKI BADAŃ I WNIOSKI
Z punktu widzenia wzrostu stopnia wewnętrznego zorganizowania KSE istotne są
badania pierwiastków równania charakterystycznego, a więc m.in. elementów macierzy A.
Natomiast z punktu widzenia zmiany poziomu sterowania istotne są badania m.in.
elementów macierzy B. Tego typu zagadnienia zostały omówione m.in. w pracach [16-18].
Badania tego typu dotyczą wspomagania systemu elektroenergetycznego metodami
sztucznej inteligencji takimi jak m.in. systemy ekspertowe, sztuczne sieci neuronowe oraz
algorytmy genetyczne [2, 3, 10, 15], co związane jest z systemowym ujęciem procesów
sterowania funkcjonowaniem i rozwojem krajowego systemu elektroenergetycznego m.in.
z punktu widzenia efektywności i bezpieczeństwa z jednej strony oraz wzrostu poziomu
sterowania i wewnętrznej organizacji KSE z drugiej strony [6, 7, 9, 12, 16, 19]. Ujęcie
rozwoju KSE z punktu ww. kryteriów sterowania prowadzi m.in. do następujących
wniosków:
­ rozwój systemu KSE wynikający z przebiegu zmiennej x1 (energia elektryczna
możliwa do wyprodukowania w ciągu roku) jest na granicy stabilności, gdyż dwa
pierwiastki równania charakterystycznego s1,2 przyjmują wartość 0,
­ na przebieg zmiennej stanu x1 mają wpływ trzy składowe: przebieg ekspotencjalny
(k11·eθ/T), liniowy k12·θ oraz skokowy k13·1(θ),
­ stała czasowa występująca w charakterystyce wykładniczej zmiennej stanu x1 (T1)
ma wartość ujemną i wynosi T1 = -1/0.1342 = -7.4516,
można zauważyć, że w wyniku wymuszenia sinusoidalnego zmienna stanu:
a) x1 po stosunkowo krótkim stanie przejściowym wywołanym wymuszeniem
sinusoidalnym (trwającym w czasie długim rozwoju systemu 1,8 lat przy
okresie rozwoju 61 lat – 2,95%) wróciła do stanu równowagi ekspotencjalnego
wzrostu, czyli zmienna stanu x1 (energia możliwa do wyprodukowania w ciągu
roku) przy wymuszeniu sinusoidalnym posiada przebieg wynikający z drgań
sinusoidalnych tłumionych ekspotencjalnie (k11·es3·θ, szybkość tłumienia
określa s3 = 0.1342), drgań sinusoidalnych tłumionych wykładniczo w
przedziałach zmienności sinusoidy wzdłuż linii prostej (k12·θ) oraz drgań
sinusoidalnych wzdłuż prostej równoległej do osi czasu θ o wartości k13 w
prawej półpłaszczyźnie,
b) x2 w wyniku wymuszenia sinusoidalnego zachowała kierunek zmian, przy
czym zmiany były oscylacyjne niezanikające (pojawiły się drgania wynikające
z przebiegu funkcji sin(θ),
c) x3 w wyniku wymuszenia sinusoidalnego miała przebieg sinusoidalny o
drganiach niegasnących wynikających z funkcji sin (θ).
LITERATURA
[1]
[2]
Bolkowska B.: Planowanie systemu elektroenergetycznego w ujęciu teorii sterowania.
Archiwum Energetyki nr 4/1974.
Cichocki A., Osowski S., Siwek K.: MATLAB w zastosowaniu do obliczeń obwodowych
i przetwarzania sygnałów. OW PW. Warszawa 2006.
Modele rozwoju Krajowego Systemu Elektroenergetycznego w ujęciu teorii …
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
25
Helt P., Parol M., Piotrowski P.: Metody sztucznej inteligencji w elektroenergetyce. Wyd.
PW. Warszawa 2000.
Kaczorek T.: Teoria sterowania i systemów. PWN. Warszawa. 1996.
Kremens Z., Sobierajski M.: Analiza układów elektroenergetycznych. WNT. Warszawa 1996.
Malko J.: Planowanie systemów elektroenergetycznych. PWN. Warszawa 1976.
Mielczarski W.: Rynki energii elektrycznej. Wybrane aspekty techniczne i ekonomiczne.
ARE S.A. Warszawa 2000.
Osowski S.: Modelowanie i symulacja układów i procesów dynamicznych. OW PW.
Warszawa 2007.
Paska J.: Niezawodność systemów elektroenergetycznych. OW PW, Warszawa 2005.
Rebizant W.: Metody inteligentne w automatyce zabezpieczeniowej. PN IE Seria;
Monografie Nr 29 (93). OW PWr., Wrocław 2004.
Rocznik Statystyczny. Główny Urząd Statystyczny, Warszawa 1947-2008.
Sienkiewicz P.: Teoria efektywności systemów. Ossolineum. Wrocław 1987
Statystyka Elektroenergetyki Polskiej. ARE. Warszawa 1946-2006.
Staniszewski R.: Sterowanie procesem eksploatacji. WNT. Warszawa 1990.
Tadeusiewicz R.: Badanie właściwości układów samodzielnych współpracujących ze
stochastycznie zmiennym środowiskiem. Postępy Cybernetyki. 4/1976.
Tchórzewski J.: Rozwój system elektroenergetycznego w ujęciu teorii sterowania i
systemów. OW PWR. Wrocław 2013.
Tchórzewski J.: Development of Electrical Power System from the Point of View of
Efficiency. Part 1. Basic development models based on IEEE IRS testing data. Computer
Applications in Electrical Engineering. IEEP PP, EEC PAN, IEEE Poland Section, PP,
Poznań 2009.
Tchórzewski J.: Development of Electrical Power System from the Point of View of
Efficiency. Part 2. Dynamic development models based on IEEE TRS testing data.
Computer Applications in Electrical Engineering. IEEP PP, EEC PAN, IEEE Poland
Section, PP, Poznań 2009.
Zajczyk R.: Modele matematyczne systemu elektroenergetycznego do badania
elektromechanicznych stanów nieustalonych i procesów regulacyjnych. Wyd. PG. Gdańsk 2003.
DEVELOPMENT MODELS OF THE NATIONAL POWER SYSTEM APPROACH
CONTROL THEORY AND SYSTEMS
To identify the National Power System (NPS) was used basics of control theory and systems
theory identification and development of systems, allowing the generation of relevant models of
development, including the development of mathematical models in the form of a matrix th and
equations in the state space (ss). Then, on this basis, a system model of the development of NPS,
which was implemented in Simulink defining successive blocks of the model as the
characteristics of each sub-NPS, identified in the MATLAB environment using the System
Identification Toolbox, and transformed in the form of models in state space using the Control
System Toolbox. As a result of solving the system of equations of state variables using the mfile in the MATLAB environment was obtained three state variables. Then, on the basis of the
obtained solution was obtained in Simulink system response NPS (output variable y1) to enforce
type: step - 1(θ) , the Dirac impulse δ(θ) and the function sin(θ). The results were interpreted.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Wojciech BĄCHOREK*
Janusz BROŻEK*
ZASTOSOWANIE ALGORYTMU EWOLUCYJNEGO
W REKONFIGURACJI SIECI DYSTRYBUCYJNEJ
Elektroenergetyczne sieci rozdzielcze średniego napięcia (SN) mają struktury otwarte
lub zamknięte, przy czym zawsze pracują w konfiguracjach otwartych. W torach głównych
linii instalowane są łączniki umożliwiające realizację stałych podziałów w sieci, tzw.
rozcięć. W referacie przedstawia się sposób określenia najlepszych lokalizacji rozcięć w
sieci rozdzielczej średniego napięcia przy założeniu zmienności obciążeń w analizowanym
okresie. Przyjętym kryterium lokalizacji rozcięć jest minimalizacja strat mocy czynnej w
sieci. Do rozwiązania przedstawionego problemu zastosowano algorytm ewolucyjny. W
artykule przedstawia się przykład obliczeniowy ilustrujący zastosowanie opracowanego
programu komputerowego.
SŁOWA KLUCZOWE: elektroenergetyczne sieci rozdzielcze, optymalizacja, straty mocy
1. WSTĘP
Elektroenergetyczne sieci rozdzielcze średniego napięcia (SN) mają struktury
otwarte lub zamknięte, przy czym zawsze pracują w konfiguracjach otwartych. W
torach głównych linii instalowane są łączniki umożliwiające realizację stałych
podziałów w sieci, tzw. rozcięć.
Kryterium lokalizacji rozcięć związane jest zazwyczaj z ograniczeniem straty
mocy czynnej. W takim przypadku wybór punktów podziałów sieci uzależniony
jest m.in. od zmian obciążeń sieci elektroenergetycznej. Obciążenia te zmieniają
się w np. w cyklu rocznym i dobowym, przez co wybór lokalizacji rozcięć dla
wybranego poziomu obciążenia (najczęściej szczytowego) nie jest optymalny w
całym rozpatrywanym okresie analizy.
W referacie przedstawia się metodę wyboru najlepszych lokalizacji rozcięć w
sieci rozdzielczej średniego napięcia przy założeniu zmienności obciążeń w
analizowanym okresie optymalizacyjnym. Przyjętym kryterium lokalizacji są
straty mocy czynnej w sieci. Do rozwiązania przedstawionego problemu
zastosowano opracowany algorytm ewolucyjny. W referacie zostaną omówione
wyniki obliczeń oraz dokonana analiza celowości i efektywności przyjętej metody
optymalizacji.
__________________________________________
* AGH Akademia Górniczo-Hutnicza w Krakowie.
28
Wojciech Bąchorek, Janusz Brożek
2. ZADANIE OPTYMALIZACYJNE
2.1. Sformułowanie problemu
Rozcięcia w sieciach dystrybucyjnych SN wyznacza się na podstawie rozpływu
mocy wyznaczając straty mocy czynnej powstające w jej obwodach. Optymalnym
miejscem rozcięcia w sieci jest to, które gwarantuje najmniejsze straty mocy. W
celu wyznaczenia rozpływu mocy, a następnie strat, konieczna jest znajomość
obciążeń stacji transformatorowo-rozdzielczych SN/nn. Obciążenia te nie są
jednak znane ze względu na brak opomiarowania tych stacji. W praktyce dokonuje
się zatem estymacji wielkości obciążeń na podstawie rejestrowanego w polach
zasilających rozdzielni SN (w stacji WN/SN) obciążenia. Jedną z metod estymacji
jest rozdział tego obciążenia proporcjonalnie do mocy znamionowych
transformatorów SN/nn zainstalowanych w danym obwodzie. Oznacza to
przyjęcie założenia o jednakowym obciążeniu względnym wszystkich
transformatorów, co z oczywiście nie jest zgodne ze stanem faktycznym. W
okolicznościach braku opomiarowania nie jest celowe częste wyznaczanie
rozpływów mocy i dokonywanie korekty rozcięć w sieci. W praktyce rozpływy
wyznaczane są dla obciążeń szczytowych w szerszym horyzoncie czasowym, a
rozcięcia w sieci są korygowane sporadycznie np. sezonowo.
Rozwijające się technologie inteligentnych systemów pomiarowych (smart
metering) pozwolą wkrótce na poznanie rzeczywistych obciążeń stacji SN/nn i
uzasadnią częstsze korekty rozcięć, o ile będzie to prowadziło do odpowiednich
zysków związanych ze zmniejszeniem strat mocy w sieci.
W referacie założono znajomość dobowych przebiegów obciążeń wszystkich
stacji SN/nn przykładowego obwodu sieci SN. Analizowany obwód stanowi sieć
SN zasilaną z dwóch głównych punktów zasilających (GPZ) - stacji WN/SN.
Przebiegi obciążenia każdej stacji SN/nn zostały w sposób losowy zróżnicowane
tak, aby stanowiły one symulację jednoczesnych pomiarów niezależnych. Na tej
podstawie określono najkorzystniejsze lokalizacje rozcięcia, zakładając w
dobowym okresie analizy możliwość cogodzinnego zmiany jego położenia.
2.2. Funkcja celu
Przyjmuje się, że funkcją celu (FC) zadania optymalnej lokalizacji rozcięć są
straty moc czynnej wyznaczanej na podstawie rozpływu prądów w sieci.
Obliczenia rozpływu prądów wyznaczane są niezależnie dla każdego przyjętego
okresu optymalizacji, w którym zakłada się stały poziom obciążenia. W takim
przypadku otrzymuje się optymalny harmonogram zmian położeń rozcięć
scharakteryzowany najmniejszymi sumarycznymi stratami mocy czynnej. Funkcję
celu zadania opisuje zależność (1).
Zastosowanie algorytmu ewolucyjnego w rekonfiguracji sieci dystrybucyjnej
o
m
FC 3 I i2j R j
min
29
(1)
i 1 j 1
gdzie: o – liczba okresów analizy, m – liczba odcinków sieci, Iij – prąd j-ego
odcinka w i-tym okresie analizy, Rj – rezystancja j-ego odcinka sieci.
2.3. Metoda rozwiązywania zadania
Opisany problem optymalizacyjny jest zadaniem dyskretnym. Miejsca
lokalizacji rozcięć są wybierane z określonego zbioru lokalizacji dopuszczalnych.
Dodatkowo problem jest utrudniony ze względu na możliwość wzajemnej
zależności położeń rozcięć w sieciach o licznych powiązaniach. W takim
przypadku dowolna lokalizacja rozcięć może przyczynić się do pozbawienia
zasilania fragmentu sieci elektroenergetycznej. Przedstawione zadanie lokalizacji
rozcięć komplikuje dodatkowo fakt zmienności obciążenia sieci. Złożoność
obliczeniowa zadania jest w tym przypadku zwielokrotniona poprzez konieczność
analizy wielu stanów obciążenia sieci i dla każdego z nich wyznaczenia
optymalnych lokalizacji rozcięć. W rozwiązywanym zadaniu uwzględniono
dodatkowe założenie polegające na ograniczeniu zmian punktów podziałów sieci w
przyjmowanym okresie analizy. Założenie to wynika z konieczności upraszczania
czynności eksploatacyjnych oraz wydłużenia trwałości łączników sekcjonujących.
Dla niewielkich sieci elektroenergetycznych oraz sieci, dla których, ze
względów praktycznych, ogranicza się zbiór możliwych lokalizacji rozcięć zadanie
można rozwiązać stosując techniki przeglądu zupełnego. W przypadku analizy
pełnej, obejmującej wszystkie odcinki sieci, metoda przeglądu zupełnego natrafia
na jej główne ograniczenie jakim jest długi czas obliczeń, szczególnie przy
konieczności ustalania lokalizacji rozcięć dla wielu stanów obciążenia sieci. W
takim przypadku z powodzeniem mogą być zastosowane metody optymalizacji
heurystycznej [4] jak np. algorytm ewolucyjny czy genetyczny [2].
Algorytm ewolucyjny operuje na całych grupach rozwiązań zadania,
nazywanych populacjami [2], [2], [1]. Populacje składają się z osobników, czyli
konkretnych rozwiązań przedstawionego problemu zapisanych w postaci ciągu
kodowego.
Pierwszym etapem działania algorytmu jest utworzenie tzw. populacji
początkowej. Ta populacja składa się z losowo utworzonych osobników
reprezentujących różne, na ogół nieoptymalne, rozwiązania postawionego zadania.
Dalsze działanie algorytmu polega na cyklicznej realizacji mechanizmów ewolucji,
którymi są: reprodukcja (selekcja), krzyżowanie, mutacja. Ogólny schemat
opracowanego algorytmu wraz z krótkim opisem zastosowanych operatorów
ewolucyjnych, został opisany w publikacji [1]. Algorytm ewolucyjny należy do
grupy algorytmów metaheurystycznych, co oznacza, że wykorzystując uniwersalny
mechanizm funkcjonowania algorytmu, możliwe jest jego zastosowanie do
30
Wojciech Bąchorek, Janusz Brożek
rozwiązania różnych problemów optymalizacyjnych. Cechą unikalną każdego
problemu optymalizacyjnego jest sposób utworzenia ciągu kodowego
(chromosomu).
W prezentowanym zadaniu optymalizacyjnym ciąg kodowy obejmuje szereg
wartości liczbowych (rys. 1). Liczba pozycji ciągu odpowiada liczbie będącej
iloczynem liczby rozcięć (r) i okresów optymalizacyjnych (o). Wartość elementu
każdej pozycji identyfikuje jedną z dopuszczalnych lokalizacji rozcięcia w sieci
(j = 1 ÷ m). Taka konstrukcja ciągu kodowego we właściwy sposób odwzorowuje
rozwiązania przedstawionego problemu.
Rys. 1. Postać chromosomu
Jakość otrzymanych rozwiązań wyznacza wartość funkcji przystosowania.
Przystosowanie osobników określane jest na podstawie wartości poszczególnych
elementów ciągu kodowego. Każdy, opisany w ten sposób osobnik populacji
charakteryzuje się pewnym przystosowaniem wyznaczającym jego użyteczność na
tle całej populacji. W rozwiązywanym zadaniu przystosowanie (P) wyznaczane
jest na podstawie zależności (2).
(2)
P C FC
gdzie: C – stała, FC – funkcja celu wyznaczana wg (1).
3. PRZYKŁAD OBLICZENIOWY
3.1. Charakterystyka sieci elektroenergetycznej
Do analizy został wybrany fragment rzeczywistej sieci dystrybucyjnej SN. W
normalnym układzie pracy sieć pracuje w konfiguracji otwartej tzn. ustalony jest
punkt podziału sieci tzw. rozcięcie. Zakłada się, ze podział sieci może być
realizowany we wszystkich odcinkach. Optymalną lokalizacją rozcięcia jest to
miejsce które zapewnia najmniejsze straty mocy czynnej. Uproszczony schemat
sieci (bez odgałęzień od toru głównego) przedstawiono na rysunku 2. Symbol
transformatora, przedstawiony na rysunku, może reprezentować odgałęzienie
zasilające zbiór transformatorów.
Analizowany obwód obejmuje łącznie 72 stacje transformatorowe SN/nn.
Zainstalowane w nich transformatory to jednostki o mocach 50630 kVA. W
obliczeniach przyjęto zróżnicowany poziom obciążenia stacji transformatorowych
– założono znajomość dobowych przebiegów obciążeń wszystkich stacji SN/nn.
Zastosowanie algorytmu ewolucyjnego w rekonfiguracji sieci dystrybucyjnej
31
Rys. 2. Schemat fragmentu sieci dystrybucyjnej
Przyjęto 24 stany obciążenia dobowego. Opisywaną sieć 15 kV stanowią w
większości linie napowietrzne (88%). Długość analizowanego toru głównego
wynosi 38.73 km. W torze głównym wyszczególniono 47 węzłów dzielących
magistralę na 48 odcinków.
3.2. Wyniki obliczeń
Lokalizacje rozcięć ustalono stosując dwie metody. Pierwsza metoda, nazwana
analityczną, polegała na wyznaczeniu rozpływów mocy dla każdego z 24 stanów
obciążenia. Zastosowano w tym celu program komputerowy realizujący obliczenia
iteracyjne metodą Gaussa-Seidla. Rozpływy były wyznaczane dla sieci pracującej
w konfiguracji zamkniętej, co pozwoliło na określenie tzw. punktów spływu
prądów i następnie ustaleniu najlepszych miejsc rozcięć sieci. Wyniki
przedstawiono w tabeli 3.1. W tabeli podano, dla każdej godziny doby, najlepszą
lokalizację rozcięcia (oznaczenia węzłów zgodne z rysunkiem 2) oraz wartość
strat mocy w poszczególnych okresach optymalizacyjnych. Łączne straty mocy
wyniosły 3755.04 kW. Przedstawione wyniki obliczeń pozwoliły na ocenę jakości
rozwiązań uzyskanych drugą metodą polegającą na obliczeniach z zastosowaniem
opracowanego algorytmu ewolucyjnego.
Wyniki dla metody analitycznej pozwalają stwierdzić, że optymalny
harmonogram zmiany położeń rozcięć wiąże się z dokonaniem 9 przełączeń w
ciągu doby. Stosując do obliczeń algorytm ewolucyjny wykorzystano dodatkową
opcję programu umożliwiającą obliczenia lokalizacji rozcięć dla zadanej
maksymalnej liczby przełączeń. Zrealizowano obliczenia dla maksymalnej liczby
przełączeń od 1 do 9. W obliczeniach przyjęto: populację 20 osobników, 2000
iteracji (pokoleń), prawdopodobieństwo krzyżowania 0.85, prawdopodobieństwo
mutacji 0.02.
32
Wojciech Bąchorek, Janusz Brożek
Tabela 3.1. Wyniki obliczeń lokalizacji rozcięć dla metody analitycznej
Godzina
Rozcięcie
ΔP [kW]
1
24-25
91.84
2
24-25
84.24
3
24-25
79.97
4
24-25
84.71
5
24-25
82.1
6
24-25
86.4
7
23-24
101.82
8
22-23
174.01
Godzina
Rozcięcie
ΔP [kW]
9
21-22
183.34
10
22-23
206.09
11
22-23
198.09
12
22-23
194.07
13
22-23
211.11
14
22-23
193.59
15
22-23
181.13
16
22-23
173.13
Godzina
Rozcięcie
ΔP [kW]
17
23-24
162.5
18
23-24
214.51
19
23-24
206.18
20
23-24
201.21
21
24-25
197.16
22
23-24
172.2
23
24-25
148.76
24
23-24
126.88
W tabeli 3.2 przedstawiono wyniki obliczeń optymalizacyjnych. Prezentowane
wyniki dotyczą okresu jednej doby. Analizując otrzymane wyniki można
stwierdzić, że dla 24 dopuszczalnych przełączeń (możliwość zmiany rozcięć co
godzinę) otrzymano ten sam wynik co w przypadku metody analitycznej. Dla
mniejszej liczby dopuszczalnych łączeń otrzymano, zgodnie z przewidywaniami,
wyniki o wyższych wartościach strat mocy czynnej. Badania wykazały, że bez
dokonywania zmian położenia punktu rozcięcia najniższe łączne straty mocy
otrzymano by dla rozcięcia w odcinku 23-24 i straty te wyniosły by 3767.31 kW.
Porównując ten wynik z wartościami z tabeli 3.2 można stwierdzić, że największy
zysk uzyskuje się realizując jedno lub dwa przełączenia (zmiany rozcięć) w ciągu
doby. Zwiększanie liczby przełączeń wiąże się z coraz mniejszym zyskiem, a w
praktyce tak częste zmiany położenia rozcięć w sieci są kłopotliwe.
Rys. 3. Przebieg procesu ewolucyjnego
Zastosowanie algorytmu ewolucyjnego w rekonfiguracji sieci dystrybucyjnej
33
Zauważalną wadą przedstawionej metody optymalizacyjnej jest długi czas
trwania obliczeń. Dla populacji liczącej 20 osobników i 100 iteracji czas obliczeń
wyniósł ok. 8 m i 40 s. Obliczenia wykonano na komputerze PC CPU 2.5 GHz,
RAM 4GB. Na rysunku 3 przedstawiono przebieg procesu ewolucyjnego bez
ograniczenia dobowej liczby przełączeń. Wyniki o wysokiej jakości (małe straty)
można otrzymać już od pokolenia 200.
Tabela 3.2. Wyniki obliczeń lokalizacji rozcięć dla algorytmu ewolucyjnego
Liczba
dopuszczalnych i
zrealizowanych
przełączeń (wartość
w nawiasie)
Łączne
straty
mocy
[kW]
24 (9)
3755.04
8; 7 (7)
3755.09
6 (6)
3755.29
5 (5)
3755.55
4 (4)
3755.86
3 (3)
3756.56
2 (2)
3756.87
1 (1)
3760.85
Harmonogram realizacji rozcięć
(odcinek z rozcięciem godziny)
24-25 1÷6; 23-24 7; 22-23 8;
21-22 9; 22-23 10÷16;
23-24 17÷20; 24-25 21; 23-24 22;
24-25 23; 23-24 24
24-25 1÷6; 23-24 7; 22-23 8;
21-22 9; 22-23 10÷16; 23-24 17÷20;
24-25 21÷23; 23-24 24
24-25 1÷6; 23-24 7, 8; 21-22 9;
22-23 10÷16; 23-24 17÷20;
24-25 21÷23; 23-24 24
24-25 1÷6; 23-24 7; 22-23 8÷16;
23-24 17÷20; 24-25 21÷23; 23-24 24
24-25 1÷6; 22-23 7÷16;
23-24 17÷20; 24-25 21÷23; 23-24 24
24-25 1÷6; 23-24 7; 22-23 8÷16;
23-24 17÷24
24-25 1÷6; 22-23 7÷16;
23-24 17÷24
24-25 1÷6; 22-23 7÷24
4. PODSUMOWANIE
Niniejszy artykuł przedstawia metodę wyboru najkorzystniejszych miejsc
lokalizacji rozcięć w sieci dystrybucyjnej SN. Jako kryterium lokalizacji przyjęto
wartość najmniejszych strat mocy czynnej.
Rozwijające się technologie smart metering umożliwią w niedalekiej
przyszłości powszechną rejestrację obciążeń stacji transformatorowych SN/nn. Tak
obszerny zbiór informacji pomiarowych będzie uzasadniał opracowanie nowych
algorytmów i metod zarządzania pracą sieci elektroenergetycznych. Próbą
34
Wojciech Bąchorek, Janusz Brożek
wykorzystania takich informacji jest metoda opisana w niniejszym referacie.
Opracowany algorytm ewolucyjny umożliwia otrzymanie rozwiązań optymalnych
przy założeniu maksymalnej liczby przełączeń (zmian położeń rozcięć) w zadanym
okresie optymalizacji. Przyjęcie w praktyce tego parametru może okazać się
konieczne m.in. ze względu na trwałość instalowanych łączników sekcjonujących.
Zauważalną wadą opracowanego algorytmu jest długi czas obliczeń, który wynika
z konieczności realizacji obliczeń rozpływów mocy dla każdej analizowanej
konfiguracji sieci. Obliczenia te jednak są konieczne w celu wyznaczenia strat
mocy czynnej. Dalsze badania będą miały na celu poprawę efektywności
algorytmu dynamicznej rekonfiguracji sieci.
LITERATURA
[1]
[2]
[3]
[4]
Bąchorek W., Brożek J., Zastosowanie algorytmu ewolucyjnego do optymalnej
lokalizacji łączników w sieci rozdzielczej średniego napięcia, Poznan University of
Technology Academic Journals. Electrical Engineering, 17th conference on
Computer Application in Electrical Engineering: Poznań, April 23–24, 2012.
Goldberg D. E., Algorytmy genetyczne i ich zastosowania, Warszawa WNT 1998.
Kulczycki J. (red.), Straty energii w sieciach dystrybucyjnych, Polskie
Towarzystwo Przesyłu i Rozdziału Energii Elektrycznej, Poznań, 2009.
Michalewicz Z., Algorytmy genetyczne + struktury danych = programy
ewolucyjne, Warszawa WNT 2003.
APPLICATION OF EVOLUTIONARY ALGORITHMS FOR DISTRIBUTION
NETWORK RECONFIGURATION
The MV networks mostly forms a closed structures, but operates in an open
configuration. In the distribution feeders there are installed switches that enable the
realization of permanent divisions of the network (tie-points). The paper presents the
method to determine the best location of the tie-points in the MV distribution network,
assuming the network load changes in the optimization period. The criterion of tie-points
location is minimization of active power losses in the network. The optimization task were
solved with using evolutionary algorithm. The paper presents a calculation example that
illustrates the use of a developed computer program.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Janusz BROŻEK*
Wojciech BĄCHOREK*
OPTYMALIZACJA STRUKTUR
ELEKTROENERGETYCZNYCH SIECI PROMIENIOWYCH
Optymalizacja promieniowych struktur sieci elektroenergetycznych należy do
problemów NP – trudnych. Funkcją celu analizowanego problemu stanowią koszty roczne
struktury sieci elektroenergetycznej (roczny koszt inwestycyjny i zmienny). Do
poszukiwania rozwiązań suboptymalnych zaproponowano metodę wykorzystującą
algorytm genetyczny i algorytm symulowanego wyżarzania. Oba algorytmy optymalizują
(minimalizują) tą samą funkcję celu. Uzyskanie takich samych rozwiązań dwoma
algorytmami zwiększa prawdopodobieństwo, że otrzymana struktura sieci promieniowej
jest strukturą optymalną w sensie przyjętej funkcji celu. W artykule przedstawiono
przykład obliczeniowy ilustrujący zastosowanie programu komputerowego do
optymalizacji struktury sieci promieniowej. Uzyskane wyniki porównano z rozwiązaniem
otrzymanym w wyniku przeglądu zupełnego.
SŁOWA KLUCZOWE:
symulowane wyżarzanie
optymalizacja,
struktury
sieci,
algorytmy
genetyczne,
1. WSTĘP
1.1. Sformułowanie problemu
W promieniowej sieci rozdzielczej zakładu przemysłowego składającej się z
Głównego Punktu Zasilania (GPZ), stacji transformatorowych SN/nn oraz
odbiorów znane są:
a) położenie (lokalizacja) GPZ,
b) m możliwych lokalizacji stacji transformatorowych SN/nn,
c) lokalizacje wszystkich n odbiorów,
d) szczytowe obciążenia mocą czynną i bierną Si = Pi + jQi, i = 1,..., n odbiorów,
e) czas użytkowania mocy szczytowej w linii Ti,
f) czas trwania maksymalnych strat w linii i,
g) jednostkowe koszty strat mocy kp i energii ka,
h) koszty i parametry elementów sieci,
__________________________________________
* AGH Akademia Górniczo-Hutnicza w Krakowie.
36
Janusz Brożek, Wojciech Bąchorek
i)
minimalne koszty roczne wszystkich możliwych połączeń każdego odbioru z
każdą stacją transformatorową.
Optymalizacja struktury sieci promieniowej polega na zaprojektowaniu
optymalnej struktury sieci zasilającej, którą tworzą:
sieć średniego napięcia SN – łączącej k stacji transformatorowych ST z
głównym punktem zasilania GPZ, przy czym 1 k m,
sieć niskiego napięcia nn – łączącej n odbiorów z k stacjami
transformatorowymi ST.
Zaprojektowana sieć musi spełniać następujące wymagania techniczne [4]:
prądowe i napięciowe prawa Kirchhoffa,
nieprzekroczenie dopuszczalnej obciążalności cieplnej i zwarciowej elementów
sieci,
nieprzekroczenie dopuszczalnych spadków napięcia,
dotrzymanie warunków minimalnego przekroju przewodów ze względów
mechanicznych.
Minimalizowaną funkcją celu jest koszt roczny Kr projektowanej sieci
rozumiany jako suma rocznych kosztów stałych Ks i rocznych zmiennych Kz (1).
k
n
k
K r K nn ij K sn j K trj min
j
i 1
(1)
j 1
gdzie: Knnij – minimalny koszt roczny linii niskiego napięcia i – tego odbioru, Ksnj –
minimalny koszt roczny linii średniego napięcia, Ktrj – minimalny roczny koszt
transformatorów.
Prezentowana praca jest kontynuacją prac [1], [2].
2. METODA OPTYMALIZACJI STRUKTUR SIECI
PROMIENIOWYCH
Do optymalizacji struktury elektroenergetycznych sieci promieniowych
wykorzystano algorytmy genetyczne AG oraz symulowanego wyżarzania SW.
Zmienne decyzyjne badanego problemu (ilość stacji transformatorowych
wybranych do rozwiązania) w obu algorytmach są zakodowane w postaci „0” – „1”
ciągu kodowego. W proponowanej metodzie „1” oznacza akceptację danej stacji
transformatorowej, a „0” jej brak w strukturze sieci elektroenergetycznej. Każdy
ciąg kodowy składa się z m elementów. Wyniki uzyskane algorytmem
genetycznym stanowią dane wejściowe do algorytmu symulowanego wyżarzania.
W algorytmie genetycznym AG, każdy chromosom (ciąg kodowy) składa się m
genów. Algorytm genetyczny zawiera standardowe procedury [3].
Populacja początkowa jest tworzona w sposób losowy tak, aby każdy
chromosom w populacji początkowej reprezentował dopuszczalne rozwiązanie
zadania. Przyjęto stałą liczebność populacji N będącą parametrem zadania.
Optymalizacja struktur elektroenergetycznych sieci promieniowych
37
Funkcja oceny (przystosowania) stanowi miernik użyteczności ciągu
kodowego. Funkcję oceny ciągu kodowego zdefiniowano jako:
N
pi f i ( x) / f i ( x)
(2)
i 1
gdzie: gdzie fi(x) jest wartością funkcji przystosowania i-tego ciągu kodowego, a
N
f ( x)
i
jest sumą przystosowania wszystkich ciągów. Funkcja przystosowania
i 1
zazwyczaj jest wprost funkcją celu.
Krzyżowanie proste. Ciągi kodowe kojarzy się w sposób losowy z puli
rodzicielskiej (nowej populacji) w pary. Następnie każda para z określonym
prawdopodobieństwem pk będącym parametrem zadania przechodzi proces
krzyżowania.
Mutacja polega na sporadycznej (zachodzącej z pewnym niewielkim
prawdopodobieństwem pm określonym jako parametr zadania) przypadkowej
zmianie wartości genu ciągu kodowego na inną wartość określoną przez allel
reprezentujący dany gen.
W algorytmie SW [1] zakłada się możliwość akceptacji rozwiązań o wyższych
kosztach rocznych niż dotychczas uzyskane. Postępowanie według algorytmu SW
sprowadza się do następujących reguł:
w każdym kroku iteracji wylicza się zmianę kosztów K jako różnicę
rozwiązania bieżącego i ostatnio zaakceptowanego,
jeżeli koszty ulegają zmniejszeniu (K< 0) to rozwiązanie jest akceptowane,
zwiększenie kosztów (K > 0) nie powoduje bezpośredniego odrzucenia
obliczonej konfiguracji sieci. Dopuszcza się jej akceptację, gdy spełniony jest
warunek:
r exp(K / T )
(3)
gdzie: T – parametr symulujący temperaturę wyrażoną w jednostkach kosztów; r –
liczba losowa rozkładu równomiernego z przedziału (0, 1).
Parametr T oblicza się według zależności Tn = ·Ts gdzie Tn i Ts to aktualna i
poprzednia wartość parametru T, - współczynnik “oziębienia”.
3. OPRACOWANIE PROGRAMU KOMPUTEROWEGO
DO OPTYMALIZACJI STRUKTURY PROMIENIOWEJ SIECI
ELEKTROENERGETYCZNEJ
Wykorzystując algorytm genetyczny AG i symulowanego wyżarzania SW
utworzono roboczą wersję programu komputerowego do optymalizacji struktury
elektroenergetycznej sieci promieniowej. Opracowany algorytm został
oprogramowany w środowisku PASCAL, a na potrzeby tej pracy przeniesiony do
38
Janusz Brożek, Wojciech Bąchorek
środowiska C++ [5]. Uproszczony schemat blokowy algorytmu AG-SW do
optymalizacji promieniowej sieci elektroenergetycznej przedstawiano na rys. 1.
START
Czytaj: Parametry AG i SA. Dane sieci elektroenergetycznej. Parametry sieci
elektrycznej. Katalogi elementów.
Budowa chromosomu reprezentującego strukturę sieci (losowe określenie
wartości poszczególnych alleli chromosomu).
Utworzenie początkowej populacji rozwiązań w sposób przypadkowy, ale tak,
aby każde rozwiązanie było rozwiązaniem dopuszczalnym.
Obliczenie wartości funkcji celu dla każdego chromosomu, obliczenie kosztu
rozwiązań w populacji wg wzorów (1).
Reprodukcja proporcjonalna populacji i utworzenie populacji tymczasowej.
Krzyżowanie ciągów kodowych z populacji tymczasowej do populacji potomnej.
Mutacja genów w populacji potomnej.
Obliczenie wartości funkcji celu dla każdego chromosomu populacji potomnej,
obliczenie kosztu rozwiązań w populacji wg wzorów (1).
Zapamiętanie najlepszego rozwiązania i wartości funkcji celu: Krmin.
it=0
Wczytanie parametrów struktury sieci Krmin do algorytmu SW.
Przeprowadzenie procedury „wyżarzania”.
Akceptacja rozwiązań mniejszych kosztach i rozwiązań zgodnie z regułą (3).
Obliczenie kosztu rozwiązań zaakceptowanych struktur sieci wg wzoru (1).
Zapamiętanie najlepszego rozwiązania i wartości funkcji celu: Kr.
tak
it=it+1
nie
Jeżeli
it<itmax
Jeżeli
Krmin >Kr
nie
Wyprowadzenie wyników (struktury sieci) dla
najlepszego zapamiętanego rozwiązania o koszcie Krmin
tak
Podstaw
Krmin = Kr
Rys. 1. Uproszczony schemat blokowy algorytmu AG-SW do optymalizacji promieniowej
sieci elektroenergetycznej
Optymalizacja struktur elektroenergetycznych sieci promieniowych
39
4. PRZYKŁAD OBLICZENIOWY
Wzajemne usytuowanie n = 30 odbiorów, m = 17 możliwych lokalizacji stacji
transformatorowych ST i GPZ elektroenergetycznej sieci modelowej
przedstawiono sieci na rys. 2. Podano lokalizacje stacji transformatorowych ST
oraz odbiorów, obciążenie odbiorów mocą czynną P i bierną Q. Znane są koszty
inwestycyjne wszystkich urządzeń oraz współczynniki umożliwiające obliczenie
funkcji celu wg zależności (1). Przyjęto następujące główne parametry algorytmu
AG-SW: liczebność populacji N = 2·m = 34, prawdopodobieństwo krzyżowania
pk = 0.95, prawdopodobieństwo mutacji pm = 0.001, wartość maksymalna
parametru Tmax = 101128, wartość minimalna parametru Tmin= 11065,
współczynnik oziębienia = 0.9, liczba iteracji w programie SW itmax = 10.
Rys. 2. Schemat struktury promieniowej sieci elektroenergetycznej otrzymany przy użyciu programu
AG-SW; m = 17, n = 30, koszt roczny, Krmin = 702687.1 zł, wybrano 5 stacji transformatorowych ST
Obliczenia wykonano na komputerze PC – Duo CPU 2.4 GHz, RAM 3GB. Na
rysunku 2 pokazano najlepszy (w sensie kosztów rocznych) projekt sieci
elektroenergetycznej zawierający 5 wybranych do rozwiązania stacji
40
Janusz Brożek, Wojciech Bąchorek
% różnica w stosunku do najlepszego rozwiązania
transformatorowych ST. Całkowity koszt roczny tego rozwiązania wynosi
Krmin = 702687.1 zł. W celu zbadania powtarzalności algorytmu AG-SW wykonano
obliczenia dla osobno działających algorytmów AG i SW oraz algorytmu AG-SW.
Na rysunku 3 przedstawiono procentowe różnice pomiędzy uzyskanymi
rozwiązaniami z programów AG i SW w odniesieniu do najlepszego rozwiązania.
Na rysunku 4 przedstawiano wyniki powtarzalności działania programu AG-SW
(koszty podano jednostkach względnych w stosunku do najlepszego rozwiązania).
Porównanie czasów obliczeń rozwiązań struktur sieci paragramami AG, SW z
czasem przeglądu zupełnego w funkcji ilości stacji transformatorowych
przedstawiano na rysunku 5.
10
9
8
Algorytm_SW
Algorytm_AG
7
6
5
4
3
2
1
0
0
10
20
30
40
50
60
kolejny test
70
80
90
100
Rys. 3. Procentowe różnice kolejnych rozwiązań w stosunku do rozwiązania najlepszego
uzyskane w 100 próbach algorytmów AG i SW
5. WNIOSKI
1.
2.
3.
Wykonane badania potwierdziły skuteczność opracowanego algorytmu i
programu AG-SW do optymalizacji struktur elektroenergetycznych sieci
promieniowych.
Połączenie algorytmów genetycznego AG i symulowanego wyżarzania SW
pozwoliło uzyskać dużą powtarzalność wyników.
W dalszych analizach przewiduje się badanie jakości otrzymywanych
rozwiązań w zależności od parametrów algorytmów AG i SW.
Optymalizacja struktur elektroenergetycznych sieci promieniowych
41
działanie algorytmu AG-SW koszty wyrażone w
jednostkach względnych
1.05
AG_dane wejściowe
SW_wyniki
1.04
1.03
1.02
1.01
1
0.99
0
2
4
6
8
10
12
14
16
18
20
nr kolejnego testu
70
350000
60
300000
algorytm AG
50
250000
algorytm SW
pełny przegląd
40
200000
30
150000
20
100000
10
50000
0
0
5
6
7
8
9
10
11
12
13
14
15
16
17
liczba stcji transformatorowych
Rys. 5. Porównanie czasów obliczeń rozwiązań struktur elektroenergetycznej sieci promieniowej
obliczonymi algorytmami AG, SW z czasem przeglądu zupełnego, w zależności od liczby
możliwych lokalizacji stacji transformatorowych ST
Czas obliczeń - przegląd zupełny [ms]
Średni czas obliczeń (algotymy SW i AG )
[ms]
Rys. 4. Działanie algorytmu AG–SW, koszty wyrażone w jednostkach względnych
w stosunku do najlepszego rozwiązania Krmin = 702687.1 zł
42
4.
Janusz Brożek, Wojciech Bąchorek
Porównanie czasów obliczeń uzyskiwanych rozwiązań przy użyciu
algorytmów AG i SW z czasem uzyskanym przy przeglądzie zupełnym
wskazuje, że dla analizowanego problemu czas rozwiązania zadania przez
przegląd zupełny (około 6 minut) jest do zaakceptowania. Czas ten szybko
wzrasta z rozmiarem zadania (liczbą stacji transformatorowych ST) co należy
uwzględnić przy analizie większych problemów.
LITERATURA
[1] Brożek J., Projektowanie optymalnych elektroenergetycznych sieci promieniowych
przy użyciu symulowanego wyżarzania, Archiwum Energetyki,15 (1996), nr 4-5, str.
1-14.
[2] Brożek J., Tylek W., Zastosowanie algorytmów genetycznych do projektowania
promieniowych sieci elektroenergetycznych, VIII Międzynarodowa Konferencja
Naukowa, Aktualne Problemy w Elektroenergetyce APE’ 97, Gdańsk - Jurata, 11-13
czerwca 1997, tom V, str. 179 –186.
[3] Goldberg D. E., Genetic Algorithms in Search, Optimization and Machine Learning,
Addison-Wesley Publishing Company, 1989.
[4] Kulczycki J., Optymalizacja struktur sieci elektroenergetycznych, WNT, Warszawa,
1990.
[5] Suder M., Optymalizacja struktur elektroenergetycznych sieci promieniowych, Praca
dyplomowa, AGH, Kraków, 2013.
OPTIMIZATION OF THE STRUCTURES OF ELECTRIC POWER RADIAL
In the paper, the problem of the optimal design of the structures of two-voltage electric
power radial networks is analyzed.The optimization of the structure of electric power
networks is an NP-hard problem. The aim function of the analyzed problem is the annual
cost of the electric power network structure (the annual investment cost + the annual
variable cost). In order to find (suboptimal) solutions to the problem a method using genetic
algorithms and simulated annealing is proposed. Both algorithms optimize (minimize) the
same function. Obtaining the same solution with the use of two different algorithms
increases the probability that the resulting network structure is optimal given the aim
function. The paper includes also an example, which illustrates the application of the
proposed method (implemented in a computer program) to the optimization of the structure
of a radial network. A comparison of the obtained results with the solution resulting from
the use of a complete (i.e., non-heuristic) method, is also provided.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Jarosław M. SZYMAŃDA*
IDENTYFIKACJA PROPAGACJI ZABURZEŃ
W SIECIACH ELEKTROENERGETYCZNYCH
W referacie przedstawiono propozycję identyfikacji obiektów dyskretnych wykorzystującej
koncepcje filtrów estymacyjnych. Podstawę proponowanej metody identyfikacji stanowią
zmodyfikowane algorytmy estymacji. Postuluje się dołączenie filtrów estymacyjnych do
kategorii pojęć związanych z filtrami adaptacyjnymi, sieciami neuronowymi i algorytmami
genetycznymi. Kontekstem aplikacyjnym artykułu są zagadnienia logistyki wybranych
elementów wytwarzania i dystrybucji energii elektrycznej, w szczególności kontroli jakości
energii dostarczanej do odbiorców końcowych. Prezentowane wyniki obejmują wybrane
elementy projektu w ramach prac podstawowych w zakresie archiwizacji i szybkiej
identyfikacji sygnałów elektrycznych. Modelowanie systemu propagacji zaburzeń
zrealizowano przy wykorzystaniu pakietu PSCAD X4.
SŁOWA KLUCZOWE: estymacja, filtry adaptacyjne,
elektroenergetycznych, identyfikacja obiektów, logistyka
zakłócenia
w
sieciach
1. WPROWADZENIE
W dobie intensywnie rozwijających się technologii pozyskiwania energii ze
źródeł odnawialnych (energia słoneczna, elektrownie wodne i wiatrowe, źródła
geotermalne) istotnego znaczenia nabierają zagadnienia związane z oceną jakości
dystrybuowanej energii. Aktualny stan techniki znacząco wpływa na wzrost
znaczenia jakości energii elektrycznej z jednej strony wprowadza się do użytku
coraz więcej urządzeń wymagających energii o wysokiej jakości, z drugiej strony
odbiorniki te istotnie oddziałują na tę jakość. Analiza w tym zakresie coraz
częściej odwołuje się do systemów logistycznych ułatwiających monitorowanie i
akwizycję danych (e-logistyka) [1, 2, 3]. Do podlegających kontroli parametrów
jakości energii elektrycznej należą m.in.: częstotliwość, wartość, wahania i skoki
napięcia, zapad napięcia, przerwy w zasilaniu, napięcia przejściowe asymetria
napięcia zasilającego, harmoniczne dla napięcia i prądu. Szczegółowe wymagania
określające procedury znormalizowanych badań zamieszczone są w odpowiednich
normach i rozporządzeniach (m.in. PN-EN 50160). Logistyka to także zarządzanie
i nadzorowanie elementów odpowiedzialnych za bezpieczną eksploatację całych
systemów od wytwórców i dystrybutorów energii do odbiorców końcowych.
__________________________________________
*Politechnika Wrocławska.
44
Jarosław M. Szymańda
Obecnie na rynku znanych jest wiele rozwiązań koncentrujących się na
świadczeniu usług informacyjnych i doradczych z zakresu wykorzystania
odnawialnych źródeł energii oraz energooszczędności [3]. Realizowane projekty
najczęściej mają na celu promocję „czystej energii” oraz zobrazowanie niezwykle
istotnego związku pomiędzy odnawialnymi źródłami energii a ochroną
środowiska. W referacie prezentowana jest propozycja mająca wspomagać
zarządzanie elementami wytwarzania i dystrybucji energii elektrycznej, w
szczególności kontroli jakości energii dostarczanej do odbiorców końcowych.
Pierwszy etap projektu w ramach prac podstawowych obejmuje elementy systemu
w kontekście archiwizacji i szybkiej identyfikacji sygnałów elektrycznych.
Przedstawiona propozycja identyfikacji obiektów dyskretnych wykorzystuje
koncepcje filtrów estymacyjnych. Podstawę proponowanej metody identyfikacji
stanowią zmodyfikowane algorytmy estymacji. W pewnym ogólnym sensie
zagadnienia systematyki filtracji, filtry estymacyjne można zestawiać z takimi
pojęciami jak algorytmy adaptacyjne, sieci neuronowe czy algorytmy genetyczne .
W pierwszym etapie badań, problem identyfikacji obiektów dyskretnych
powiązano z określeniem możliwości filtracji próbek sygnałów podług
zdefiniowanej a priori funkcji celu. Prezentowane wyniki obejmują wybrane
elementy projektu w ramach prac podstawowych w kontekście archiwizacji i
szybkiej identyfikacji sygnałów elektrycznych [1, 2, 3].
2. FUNKCJA IDENTYFIKACJI ZDARZEŃ I OBIEKTÓW
DYSKRETNYCH
Algorytm definiowania funkcji celu jest złożoną procedurą przetwarzania
charakterystycznych parametrów (cech) próbek z określonym dla danego
zagadnienia ograniczeniem. W ogólnym przypadku przedmiotowe ograniczenie
może być łączone także z elementami optymalizacji, na przykład z minimalizacją
warunków brzegowych niezbędnych do rozwiązania problemu [1, 2]. Dla
przedstawionego modelu filtracji przyjęto w pierwszej fazie zasadę rozdzielenia
obserwacji zdarzeń od kontekstu technicznego. Takie podejście zwiększyło
możliwość doboru metod analizy z szerszego repozytorium narzędzi badawczych.
W konsekwencji powyższych rozważań, zaproponowano wykorzystanie metod
estymacyjnych, w których szczególną rangę przypisuje się zależnościom
funkcjonalnym oraz statystyce kwalitatywnej. W wyniku wstępnej analizy danych
w zakresie przyjmowanych wartości oraz rozłożeniu w wektorze porządkowym
(może być przyporządkowany zdarzeniom czasowym), stwierdzono występowanie
charakterystycznych cech podług których można było zdefiniować estymacyjną
funkcję celu. Dla celów klasyfikacji można wyróżnić między innymi: ze względu
na sposób szacowania próby estymację punktową i przedziałową oraz ze względu
na dobór próby estymację sekwencyjną i z ustaloną wielkością próby.
Identyfikacja propagacji zaburzeń w sieciach elektroenergetycznych
45
W pierwszym etapie badań symulacyjnych wykonano testy skorelowania metod
estymacyjnych ze schematem optymalizacyjnym metody simpleks dla kilku
reprezentatywnych algorytmów. Przykładowy diagram organizacji algorytmu
określania istotnych cech obiektów przedstawiono na rysunku 1. Na diagramie
zaznaczono trzy charakterystyczne obszary związane z wyznaczaniem funkcji celu:
1. „Rejestracja zdarzeń (obiektów)” – obejmuje procedury odwzorowywania
obiektów monitorowanego systemu, najczęściej dyskretyzacja obiektów ciągłych
(np. próbkowanie sygnałów) oraz akwizycja i archiwizacja obiektów;
2. „Procedury estymacyjne” – wstępna analiza statystyczna obiektów (próbek)
oraz wybór estymatora wraz z algorytmem wyostrzania cech (tj. rekurencyjnej
adaptacji parametrów estymatora); 3. „Optymalizacja” – wyznaczanie
charakterystycznych i istotnych cech obiektu. Cechy istotne są podzbiorem cech
charakterystycznych obiektu, i wybierane podług kryteriów estymacyjnych (tutaj
filtracji próbek) dla zdefiniowanych a priori warunków brzegowych zdarzenia.
Należy tutaj podkreślić, iż ewentualne zaniedbanie weryfikacji warunków
brzegowych dla procedury estymacyjnej, może być przyczyną błędnego
oznaczania istotnych i charakterystycznych cech obiektu.
Rys. 1. Wariant diagramu przepływu informacji w procedurach wyznaczania istotnych cech obiektu
Dla wstępnych analiz postuluje się zawsze oznaczanie istotnych cech obiektu na
podstawie rejestrowania obiektów w stanach wyróżnionych, na przykład podczas
wystąpienia awarii systemu. Zdarzenia awaryjne, będące często splotem bardzo
wielu okoliczności, w typowych algorytmach deterministycznych są bardzo
trudnym elementem do zaprogramowania. Model identyfikacji obiektów poprzez
estymacyjną funkcję celu, jest właśnie propozycją dedykowaną dla takich
przypadków. Przewiduje się możliwość rejestrowania i gromadzenia
charakterystycznych cech obiektu w stanach istotnych na przykład z punktu
widzenia zabezpieczeń i automatyki systemów elektroenergetycznych.
46
Jarosław M. Szymańda
Rys. 2. Algorytm ESTFILTER wybierający istotne cechy obiektu X dla funkcji celu
(FC): lokalne ekstremum
Propozycja realizacji technicznej takiego systemu została zaprezentowana
między innymi w artykułach [2, 3]. Identyfikacja obiektów, a w szczególności
identyfikacja obiektów dyskretnych, może być oczywiście postrzegana jako
zagadnienie filtracji. Dla ustalenia uwagi, dalszy opis odnosi się do przypadku
filtracji próbek sygnału przy wykorzystaniu przykładowej estymacyjnej funkcji
celu. W naszym przypadku funkcja celu dla estymatora określona została na
podstawie cech charakterystycznych obiektu spełniające lokalne kryterium
monotonicznie malejących amplitud próbek sygnału. Algorytm ESTFILTER
filtrujący charakterystyczne cechy obiektu X i wybierający istotne cechy obiektu
przedstawiono na rysunku 2. W referacie zamieszczono przykład filtracji próbek
sygnału podług funkcji celu określonej dla lokalnych ekstremów estymowanych na
podstawie warunków ograniczających. Cechą charakterystyczną filtrowanych
obiektów są co do wartości bezwzględnej monotonicznie malejące amplitudy
lokalnych maksimów próbek. Zgodnie z postulatami proponowanej metody
identyfikacji, estymator zaimplementowany jest w algorytmie w formie
sparametryzowanego opisu funkcyjnego. Omówiona zasada filtracji i efekt
działania filtru estymacyjnego z określoną jak wyżej funkcją celu został
przedstawiony na rysunkach 3 i 4.
Identyfikacja propagacji zaburzeń w sieciach elektroenergetycznych
Rys. 3. Przykład identyfikacji istotnych cech
obiektu X spełniających kryterium dla funkcji
celu (FC): monotonicznie malejących amplitud
(oś x ozn. jest numerami porządkowymi obiektów)
47
Rys. 4. Przykład identyfikacji istotnych cech
sygnału elektrycznego, spełniających kryterium
funkcji celu (FC:) monotonicznie malejących
wartości amplitud
3. PROPAGACJA ZABURZEŃ W SIECIACH
ELEKTROENERGETYCZNYCH
3.1 Definicja pieczątki węzła systemu elektroenergetycznego NPSS
Proponowana metoda identyfikacji zdarzeń może być przedstawiona w kontekście
logistyki systemu wytwarzania i dystrybucji energii elektrycznej. W pierwszym
wariancie oceny możliwości monitorowania systemu elektroenergetycznego przy
wykorzystaniu estymacyjnej funkcji celu, przyjęto iż w wybranych węzłach systemu
możliwa będzie indywidualna rejestracja charakterystycznych cech obiektu, ze
szczególnym uwzględnieniem rejestracji obiektów w stanach wyróżnionych.
Przykładem mogą być stany awarii systemu. Przykładowy diagram funkcjonalny
takiego ujęcia zagadnienia przedstawiony został na rysunku 5. Wyszczególnione tam
obiekty reprezentują w sposób symboliczny wybrane newralgiczne z punktu widzenia
bezpieczeństwa i niezawodności pracy węzły systemu elektroenergetycznego. W
każdym z tych węzłów rejestrowana jest i archiwizowana w systemie indywidualna
metryka węzła, którą również można określać przez analogię do wykorzystywanej w
systemach bazodanowych pieczątki czasowej, pieczątką węzła systemu
elektroenergetycznego. Proponuje się także, na potrzeby projektu, wprowadzenie
uniwersalnego akronimu NPSS od angielskiej nazwy pieczątki Node Power System
Stamp. Zarejestrowane w pieczątce wartości uwzględniają nie tylko wartości własne
węzła (obiektu), ale także umiejscowienie węzła w całym systemie, innymi słowy,
wartości NPSS są efektem wzajemnej interakcji węzła i systemu. Realizowane prace
weryfikacyjne projektu, zmierzają właśnie w kierunku określenia stopnia korelacji
zdarzeń oraz możliwości identyfikacji węzła poprzez analizę danych telemetrycznych
48
Jarosław M. Szymańda
w sieciach elektroenergetycznych w dowolnym
(monitorującym, dyspozytorskim, logistycznym).
węźle
obserwacyjnym
Rys. 5. Diagram funkcjonalny propagacji i identyfikacji zaburzeń w sieciach elektroenergetycznych
Uwzględniając kompleksową obsługę logistyczną całego systemu elektroenergetycznego, na potrzeby projektu, przyjęto także określenie dedykowanego
akronimu dla węzła logistycznego NPSLogistics (Node Power System Logistics).
Poglądowy schemat sieci elektroenergetycznej z naniesionymi węzłami NPSS oraz
NPSLogistics przedstawiono na rysunku 6.
3.2 Model symulacji propagacji zaburzeń w systemie elektroenergetycznym
Modelowanie systemu propagacji zaburzeń zrealizowano przy wykorzystaniu
pakietu PSCAD X4 w wersji 4.4.0/2011. Pakiet PSCAD jest uznanym,
komercyjnym zestawem programów umożliwiających projektowanie i badanie
złożonych systemów elektroenergetycznych. PSCAD posiada bogatą bibliotekę
standardowych elementów gotowych do wstawienia do badanego modelu
symulacyjnego. Bardzo ważną cechą pakietu jest uwzględnianie dla większości
zdefiniowanych elementów zaleceń oraz obowiązujących norm technicznych.
Oprócz prostych elementów pasywnych, mogą być wykorzystywane także
złożone komponenty, takie jak modele linii napowietrznych i kablowych, stacji
rozdzielczych oraz wielu innych. Przykładowe modele umożliwiające badanie
zależności pomiędzy węzłami NPSS a węzłami NPSLogistics przedstawiono na
rysunkach 7 i 8.
Identyfikacja propagacji zaburzeń w sieciach elektroenergetycznych
Rys. 6. Poglądowy schemat fragmentu sieci
elektroenergetycznej z naniesionymi węzłami
NPSS oraz NPSLogistics
Rys. 7. Wybrany prosty wariant indywidualnego bloku z przykładowymi parametrami
elektrycznymi obiektu;
„Timed Fault Logic“ – programator zdarzeń
czasowych dla zdefiniowanych lokalnych awarii
(np.zwarcia)
Rys. 8. Diagram funkcjonalny propagacji i
identyfikacji symulowanych zaburzeń w
sieciach elektroenergetycznych
Rys. 9. Obserwacje charakterystycznych
przebiegów czasowych obiektu w węźle
NPSLogistics A
49
50
Jarosław M. Szymańda
4. PODSUMOWANIE
Po przeprowadzonych w pierwszym etapie badaniach symulacyjnych
stwierdzono możliwość wykorzystania estymacyjnej funkcji celu podczas
identyfikacji obiektów na podstawie ustalonych cech charakterystycznych.
Podniesiony w projekcie kontekst analizy propagacji zaburzeń w sieciach
elektroenergetycznych uznano jako ważną propozycję, która w perspektywie
dalszych prac weryfikacyjnych, mogłaby wzbogacić elementy logistyki w zakresie
zarządzania i nadzorowania tych systemów. Podkreślono, że szybka identyfikacja i
lokalizacja stanu awaryjnego w węzłach ma również strategiczne znaczenie w
zakresie bezpieczeństwa energetycznego całych systemów od wytwórców i
dystrybutorów energii do odbiorców końcowych. Na potrzeby projektu
wprowadzono
nowe
pojęcia
lokalizacyjne
w
strukturach
sieci
elektroenergetycznych: pieczątki węzła systemu NPSS oraz węzła logistycznego
PSLogistics .
Projekt został sfinansowany ze środków Narodowego Centrum Nauki przyznanych
na podstawie decyzji numer DEC-2011/01/B/ST8/02515
LITERATURA
[1]
[2]
[3]
Szymańda J.M.: System archiwizacji i identyfikacji sygnałów elektrycznych.:
Transactions on computer applications in electrical engineering : XV Conference
ZKwE '10, Poznan, April 19-21, 2010 / [sci. ed. Ryszard Nawrowski]. Poznań :
Agencja Reklamowa COMPRINT, 2010. s. 75-76.
Szymańda J.M.: The automatic data acquisition in distributed systems
teletransmission: Logistyka 6/2010, CD Rom, Poland, 2010, 6, ADE, str.: 35873599: ISSN: 1231-5478.
Sikorski T. Szymańda J.M, Zenger M.: Monitoring i analiza stanów
zakłóceniowych w sieciach elektroenergetycznych.: 2012 Przegląd Elektrotechniczny 2012. ISSN: 0033-2097: R. 88, nr 11b: s.178-181.
IDENTIFICATION OF ELECTRICAL DISTURBANCES IN THE POWER GRID
In this paper the proposal of the identification of discrete objects using concepts of
estimation filters is presented. Estimation methods and mathematical programming have
been the subject of the first stage of the research project: “Novel signal processing methods
and global power quality indices for assessment of power systems with distributed
generation”. The results are presented in the context of archiving and quick identification
of electrical signals. Modeling system of propagation disturbance using PSCAD X4
package was carried out.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Piotr PRUSKI*
Stefan PASZEK*
OBLICZENIA ELEKTROMECHANICZNYCH WARTOŚCI
WŁASNYCH NA PODSTAWIE ANALIZY
RÓŻNYCH PRZEBIEGÓW ZAKŁÓCENIOWYCH
W SYSTEMIE ELEKTROENERGETYCZNYM
W artykule przedstawiono wyniki obliczeń wartości własnych macierzy stanu systemu
elektroenergetycznego (SEE) związanych ze zjawiskami elektromechanicznymi (czyli
elektromechanicznych wartości własnych). Porównano dokładność obliczeń wartości własnych wykonanych na podstawie analizy przebiegów zakłóceniowych mocy chwilowej,
prędkości kątowej oraz kąta obciążenia generatorów poszczególnych zespołów wytwórczych SEE. Wykorzystana w artykule metoda obliczeń wartości własnych polega na
aproksymacji przebiegów zakłóceniowych zespołów wytwórczych przebiegami stanowiącymi superpozycję składowych modalnych, których parametry zależą od poszukiwanych
wartości własnych i ich czynników udziału. Do minimalizacji funkcji celu określonej jako
błąd średniokwadratowy, występujący między przebiegami aproksymowanymi i aproksymującymi wykorzystano algorytm hybrydowy, stanowiący połączenie algorytmu genetycznego i gradientowego.
SŁOWA KLUCZOWE: system elektroenergetyczny, wartości własne związane ze
zjawiskami elektromechanicznymi, stany nieustalone, stabilność kątowa
1. WSTĘP
Zachowanie stabilności kątowej systemu elektroenergetycznego (SEE) jest
jednym z najważniejszych warunków jego poprawnej pracy. Ocenę stabilności
kątowej SEE można przeprowadzić z wykorzystaniem wskaźników stabilności [1],
obliczanych na podstawie wartości własnych macierzy stanu SEE związanych ze
zjawiskami elektromechanicznymi (zwanych w artykule elektromechanicznymi
wartościami własnymi). Elektromechaniczne wartości własne można obliczyć na
podstawie równań stanu SEE, jednak wyniki obliczeń zależą wówczas od wartości
elementów macierzy stanu SEE, a pośrednio od przyjętych modeli elementów SEE
i ich niepewnych parametrów [2]. Te wartości własne można również obliczyć z
dobrą dokładnością na podstawie analizy rzeczywistych przebiegów
zakłóceniowych, pojawiających się w SEE po różnych zakłóceniach [3, 4].
__________________________________________
* Politechnika Śląska.
52
Piotr Pruski, Stefan Paszek
Celem niniejszej pracy jest porównanie dokładności
obliczeń
elektromechanicznych wartości własnych na podstawie analizy przebiegów
zakłóceniowych mocy chwilowej, prędkości kątowej oraz kąta obciążenia
generatorów zespołów wytwórczych SEE.
2. ZLINEARYZOWANY MODEL SEE
Zlinearyzowany w punkcie pracy model SEE opisany jest równaniem stanu
i równaniem wyjścia [4]:
X AX BU ,
(1)
ΔY CX DU ,
(2)
gdzie: ΔX , ΔU , ΔY – odchyłki wektora zmiennych stanu, wektora wymuszeń i
wektora zmiennych wyjściowych. Elementy macierzy A, B, C i D są obliczane dla
ustalonego punktu pracy.
Przebiegi wielkości wyjściowych zlinearyzowanego modelu SEE można
obliczyć bezpośrednio, całkując równanie stanu, lub na podstawie wartości
własnych i wektorów własnych macierzy stanu A [4]. Przebieg danej wielkości
wyjściowej stanowi superpozycję składowych modalnych zależnych od wartości
własnych i wektorów własnych macierzy stanu. Przy zakłóceniu (w chwili t0) w
postaci impulsowej zmiany j-tej wielkości wymuszającej Uj(t) = U(t–t0)
przebieg i-tej wielkości wyjściowej (przy D = 0 i założeniu występowania tylko
jednokrotnych wartości własnych) ma postać [4]:
n
yi t Fih e h t t0 U , t t0 ,
(3)
h1
Fih C iVhW hT B j ,
(4)
gdzie: h h j h – h-ta wartość własna macierzy stanu, Fih – czynnik udziału
h-tej wartości własnej w przebiegu i-tej wielkości wyjściowej, Ci – i-ty wiersz
macierzy C, Vh, Wh – h-ty prawostronny i lewostronny wektor własny macierzy
stanu, Bj – j-ta kolumna macierzy B, n – wymiar macierzy stanu A.
W przypadku przebiegów zakłóceniowych mocy chwilowej, prędkości kątowej
oraz kąta obciążenia generatorów zespołów wytwórczych SEE duże znaczenie mają
składowe modalne związane z elektromechanicznymi wartościami własnymi. Te
wartości własne w różny sposób ingerują w przebiegach zakłóceniowych
poszczególnych zespołów wytwórczych, co związane jest z różnymi wartościami
ich czynników udziału.
3. METODA OBLICZEŃ WARTOŚCI WŁASNYCH
W obliczeniach wykorzystano przebiegi zakłóceniowe odchyłek wielkości
wyjściowych zespołów wytwórczych, które pojawiają się po celowym
Obliczenia elektromechanicznych wartości własnych na podstawie analizy …
53
wprowadzeniu małego zakłócenia do SEE. Przyjęto zakłócenie w postaci impulsu
prostokątnego w przebiegu napięcia zadanego regulatora napięcia Vref w jednym z
zespołów wytwórczych. Odpowiedź układu na wymuszenie w postaci
krótkotrwałego impulsu prostokątnego (o odpowiednio dobranej wysokości i
szerokości) jest zbliżona do odpowiedzi tego układu na wymuszenie w postaci
impulsu Diraca [4, 5].
Wykorzystana w badaniach metoda obliczeń elektromechanicznych wartości
własnych polega na aproksymacji przebiegów zakłóceniowych w poszczególnych
zespołach wytwórczych za pomocą wyrażenia (3). Elektromechaniczne wartości
własne i czynniki udziału poszczególnych składowych modalnych są nieznanymi
parametrami tej aproksymacji. W procesie aproksymacji parametry te dobierane są
iteracyjnie w taki sposób, aby zminimalizować wartość funkcji celu, określonej
jako błąd średniokwadratowy εw, występujący między przebiegiem
aproksymowanym a aproksymującym:
N
w λ,F Wk ( m) Wk (a ) λ,F 2 ,
(5)
k 1
gdzie: λ – wektor elektromechanicznych wartości własnych, F – wektor
czynników udziału, ΔW – przebieg odchyłek analizowanej wielkości, k – numery
próbek przebiegów, N – liczba próbek przebiegów, indeks m oznacza przebieg
aproksymowany, a indeks a – przebieg aproksymujący, obliczony na podstawie
wartości własnych i czynników udziału według wzoru (3).
Aby wyeliminować wpływ szybko zanikających składowych modalnych,
pochodzących od rzeczywistych oraz zespolonych wartości własnych, nie
związanych ze zjawiskami elektromechanicznymi, analizę przebiegów
rozpoczynano po pewnym czasie tp od chwili wystąpienia zakłócenia [4].
Z przeprowadzonych obliczeń wynika, że w przebiegach odchyłek mocy
chwilowej ΔP ingerują w sposób znaczący (w czasie po zaniknięciu silnie
tłumionych składowych modalnych) tylko elektromechaniczne wartości własne. W
przebiegach odchyłek prędkości kątowej Δω ingerują w sposób znaczący także
inne wartości własne, lecz wpływ elektromechanicznych wartości własnych także
jest znaczący. Wpływ elektromechanicznych wartości własnych na przebiegi
odchyłek kąta mocy Δδ jest stosunkowo niewielki w porównaniu do innych
wartości własnych. Ponadto wartości ustalone przebiegów Δδ po zakłóceniu
różnią się od wartości początkowych tych przebiegów przed zakłóceniem. Na
podstawie przeprowadzonych badań stwierdzono, że w celu umożliwienia
poprawnej aproksymacji przebiegu Δω należy w przypadku zakłócenia
impulsowego uwzględnić jedną zastępczą oscylacyjną składową modalną o
stosunkowo małej częstotliwości, która odwzorowuje wpływ pominiętych
składowych modalnych na ten przebieg. Natomiast dla przebiegu Δδ należy w tym
przypadku uwzględnić dwie zastępcze składowe modalne: oscylacyjną (jak dla
54
Piotr Pruski, Stefan Paszek
przebiegu Δω) oraz aperiodyczną. Parametry zastępczych składowych modalnych
również podlegają optymalizacji.
Z powodu występowania minimów lokalnych funkcji celu, w których algorytm
optymalizacyjny może utknąć, proces aproksymacji przeprowadzano wielokrotnie
na podstawie tego samego przebiegu zakłóceniowego. Odrzucano wyniki o
wartościach funkcji celu większych, niż pewna przyjęta wartość graniczna. Jako
wynik końcowy obliczeń części rzeczywistych i części urojonych poszczególnych
wartości własnych przyjęto średnie arytmetyczne z wyników nie odrzuconych w
kolejnych obliczeniach.
4. PRZYKŁADOWE OBLICZENIA
Przykładowe obliczenia przeprowadzono dla 7-maszynowego testowego SEE
CIGRE (rys. 1). Analizowano przebiegi pojawiające się po wprowadzeniu
zakłócenia impulsowego ΔVref = –5% Vref0 w zespole G4 o czasie trwania timp =
200 ms (Vref0 oznacza wartość początkową napięcia zadanego regulatora napięcia).
G6
L4
G5
5
L2
9
7
G7
L1
0
L6
8
L5
L13
L3
L1
6
4
L9
10
3
1
L1
2
L7
L8
G3
G4
G2
L1
2
1
G1
Rys. 1. Analizowany 7-maszynowy SEE CIGRE
Wartości własne (w tym elektromechaniczne wartości własne) macierzy stanu
systemu można obliczyć bezpośrednio na podstawie modelu i parametrów SEE w
programie Matlab-Simulink. Te elektromechaniczne wartości własne są nazywane
w artykule oryginalnymi wartościami własnymi. Porównanie wartości własnych
obliczonych na podstawie minimalizacji funkcji celu (5) i oryginalnych wartości
własnych jest miarą dokładności obliczeń [4]. W tabeli 1 zestawiono oryginalne
wartości własne analizowanego SEE CIGRE.
Tabela 1. Oryginalne wartości własne analizowanego SEE CIGRE
λ1
λ4
–0,881±j10,443
–0,527±j8,748
λ2
λ5
–0,826±10,620
–0,417±j7,872
λ3
λ6
–0,763±j9,669
–0,189±j6,542
Obliczenia elektromechanicznych wartości własnych na podstawie analizy …
55
W obliczeniach wzięto pod uwagę modele: generatora synchronicznego
GENROU z nieliniową charakterystyką magnesowania [5, 6, 7], statycznego
układu wzbudzenia, pracującego w Krajowym Systemie Elektroenergetycznym
[5], turbiny parowej IEEEG1 [6] i stabilizatora systemowego PSS3B [5, 6].
4.1. Analiza wpływu wyboru wielkości wyjściowej na czynniki udziału
Jak wynika ze wzoru (1), przy założeniu D = 0, wartości wektora ΔY zależą
od wartości wektora zmiennych stanu ΔX oraz macierzy C. Przebieg i-tej
wielkości wyjściowej otrzymuje się poprzez przemnożenie i-tego wiersza
macierzy C oraz wektora ΔX . Ze wzoru (4) wynika, że czynnik udziału Fih
zależy od wartości elementów w kolejnych wierszach macierzy C. Zatem czynniki
udziału wartości własnej są różne w przebiegach zakłóceniowych poszczególnych
wielkości wyjściowych SEE.
Przykładowo w tabeli 2 zestawiono względne moduły czynników udziału |F|pu
elektromechanicznych wartości własnych w przebiegach odchyłek mocy
chwilowej ΔP, prędkości kątowej Δω oraz kąta mocy Δδ zespołu G1 (w
odniesieniu do największych modułów czynników udziału elektromechanicznych
wartości własnych w tych przebiegach).
Tabela 2. Czynniki udziału elektromechanicznych wartości własnych
w przebiegach zespołu G1
Przebieg ΔP
Przebieg Δω
Przebieg Δδ
|F1|pu
0,0371
0,0226
0,0141
|F2|pu
0,0199
0,0119
0,0073
|F3|pu
0,0099
0,0065
0,0044
|F4|pu
0,3044
0,2229
0,1665
|F5|pu
0,0147
0,0120
0,01
|F6|pu
1
1
1
Z tabeli 2 wynika, że względne moduły czynników udziału poszczególnych
elektromechanicznych wartości własnych w analizowanych przebiegach
zakłóceniowych wielkości wyjściowych zespołu G1 znacząco się różnią. Podobna
sytuacja występuje w przypadku przebiegów pozostałych zespołów analizowanego
SEE CIGRE. Na podstawie przeprowadzonych badań stwierdzono, że wartości
własne można zazwyczaj obliczyć z zadowalającą dokładnością na podstawie
przebiegów, w których względne moduły czynników udziału są większe, niż 0,1.
Z przebiegów zespołu G1 można więc obliczyć wartości własne λ1 i λ6.
4.2. Obliczenia elektromechanicznych wartości własnych
Przykładowo na rys. 2 przedstawiono przebiegi zakłóceniowe odchyłek mocy
chwilowej ΔP, prędkości kątowej Δω oraz kąta mocy Δδ zespołu G1 oraz pasma
przebiegów aproksymujących, odpowiadających nieodrzuconym wynikom
56
Piotr Pruski, Stefan Paszek
obliczeń. Pasmo przebiegów aproksymujących określa zakres zmian wielkości
wyjściowej, w którym „znajdują się” wszystkie przebiegi aproksymujące
odpowiadające poszczególnym wynikom obliczeń.
b)
4
5
2
4
, obr/min
P, MW
a)
0
-2
przebiegi aproksymujące
przebieg aproksymowany
-4
-6
0
2
4
6
8
przebiegi aproksymujące
przebieg aproksymowany
3
2
1
0
10
-1
0
2
4
t, s
6
8
10
t, s
c)
, p.u.
0,2
0,1
przebiegi aproksymujące
przebieg aproksymowany
0
0
2
4
6
8
10
t, s
Rys. 2. Przykładowe przebiegi zakłóceniowe odchyłek: mocy chwilowej ΔP (a),
prędkości kątowej Δω, (b) oraz kąta mocy Δδ (c) zespołu G1
W tabeli 3 zestawiono błędy bezwzględne Δλ obliczeń elektromechanicznych
wartości własnych na podstawie przebiegów zakłóceniowych ΔP, Δω oraz Δδ
zespołów wytwórczych SEE CIGRE. Wartości własne były na ogół obliczane na
podstawie przebiegów różnych zespołów. W tabeli zestawiono średnie arytmetyczne
błędów wszystkich uzyskanych wyników obliczeń tych wartości własnych.
Z tabeli 3 wynika, że wszystkie elektromechaniczne wartości własne zostały
obliczone z zadowalającą dokładnością. Błędy obliczeń wartości własnych na
podstawie przebiegów poszczególnych zespołów były porównywalne. Średnie
arytmetyczne błędów obliczeń części rzeczywistych i części urojonych wartości
własnych na podstawie przebiegów różnych zespołów wytwórczych na ogół były
najmniejsze (co do modułu) w przypadku przebiegów Δω.
Obliczenia elektromechanicznych wartości własnych na podstawie analizy …
57
Tabela 3. Błędy bezwzględne obliczeń wartości własnych
Δλ1
Δλ4
Δλ1
Δλ4
Δλ1
Δλ4
Przebiegi zakłóceniowe odchyłek mocy chwilowej ΔP
–0,0357±j0,2104 Δλ2 0,0310 j0,0526 Δλ3
0,0524 j0,1105
–0,0275 j0,0345 Δλ5 0,0219 j0,0091 Δλ6 –0,0167±j0,0191
Przebiegi zakłóceniowe odchyłek prędkości kątowej Δω
0,0582±j0,0386
Δλ2 0,0201 j0,0708 Δλ3
0,0052 j0,0920
0,0070 j0,0683
Δλ5 –0,0075±j0,0411 Δλ6
0,0124 j0,0200
Przebiegi zakłóceniowe odchyłek kąta mocy Δδ
–0,0921 j0,3990 Δλ2 0,0268±j0,0105 Δλ3
0,0886 j0,1789
0,0231 j0,0129
Δλ5 –0,0215±j0,1317 Δλ6
0,0081 j0,0442
W przypadku przebiegów odchyłek kąta mocy Δδ występowały liczne minima
lokalne funkcji celu, odpowiadające nieprawidłowym wynikom obliczeń
elektromechanicznych wartości własnych. Mogło to być spowodowane
stosunkowo małymi amplitudami składowych modalnych związanych z
obliczanymi wartościami własnymi. Inną przyczyną mogła być konieczność
uwzględnienia w obliczeniach dwóch zastępczych składowych modalnych (por.
punkt 3). Z powodu istnienia tych minimów lokalnych często nie było możliwe
dokładne obliczenie wartości własnych pomimo, że miały one duże moduły
czynników udziału w analizowanych przebiegach.
5. PODSUMOWANIE
Przeprowadzone badania pozwoliły stwierdzić, że:
Badania przeprowadzone dla SEE CIGRE wykazały, że możliwe jest
wyznaczenie z dobrą dokładnością elektromechanicznych wartości własnych
na podstawie analizy przebiegów mocy chwilowej, prędkości kątowej oraz kąta
mocy po wprowadzeniu zakłócenia impulsowego w układzie regulacji napięcia
jednego z zespołów wytwórczych.
W przypadku przebiegów mocy chwilowej i prędkości kątowej wartości własne
zostały obliczone z dobrą dokładnością na podstawie analizy większości
przebiegów, w których miały one dostatecznie duże moduły czynników
udziału. Zastosowana metoda obliczeń wartości własnych na podstawie tych
przebiegów sprawdza się także w przypadku dużych SEE takich, jak Krajowy
System Elektroenergetyczny.
Uśrednianie wyników obliczeń kolejnych wartości własnych na podstawie
analizy przebiegów prędkości kątowej różnych zespołów pozwoliło na
zwiększenie dokładności obliczeń.
58
Piotr Pruski, Stefan Paszek
LITERATURA
[1]
[2]
[3]
[4]
[5]
[6]
[7]
Paszek S., Nocoń A., The method for determining angular stability factors based on
power waveforms, AT&P Journal Plus2, Power System Modeling and Control,
Bratislava, Slovak Republic 2008, pp. 71-74.
Cetinkaya H.B., Ozturk S., Alboyaci B., Eigenvalues Obtained with Two
Simulation Packages (SIMPOW and PSAT) and Effects of Machine Parameters on
Eigenvalues, Electrotechnical Conference, 2004, MELECON 2004, Proceedings of
the 12th IEEE Mediterranean, Vol. 3, pp. 943-946.
Saitoh H., Miura K., Ishioka O., Sato H., Toyoda J., On-line modal analysis based
on synchronized measurement technology, Power System Technology, 2002,
Proceedings, PowerCon 2002, International Conference on, vol. 2, pp. 817 – 822.
Pruski P., Paszek S.: Obliczenia elektromechanicznych wartości własnych na
podstawie przebiegów mocy chwilowej zarejestrowanych w elektrowni, Acta
Energetica, Konferencja „Aktualne Problemy w Elektroenergetyce”, Systemy
elektroenergetyczne, Jurata, 12-14.06.2013, s. 153-161.
Paszek S., Wybrane metody oceny i poprawy stabilności kątowej systemu
elektroenergetycznego, Wydawnictwo Politechniki Śląskiej, Gliwice 2012.
Power Technologies, a Division of S&W Consultants Inc., Program PSS/E
Application Guide, Siemens Power Technologies Inc., 2002.
de Mello F. P., Hannett L. H., Representation of Saturation in Synchronous
Machines, IEEE Transactions on Power Systems 1986, Vol. PWRS-1, November,
No.4, pp. 8-18.
CALCULATIONS OF ELECTROMECHANICAL EIGENVALUES
BASED ON ANALYSIS OF DIFFERENT DISTURBANCE WAVEFORMS
IN A POWER SYSTEM
In the paper there are presented the calculation results of the power system state matrix
eigenvalues associated with electromechanical phenomena (i.e. electromechanical
eigenvalues). There is compared the accuracy of eigenvalue calculations carried out on the
basis of the analysis of disturbance waveforms of the instantaneous power, angular speed
and power angle of generators of particular generating units of the power system. The
method of eigenvalue calculations used consists in approximation of the disturbance
waveforms of generating units with the waveforms being a superposition of modal
components whose parameters depend on the searched eigenvalues and their participation
factors. A hybrid algorithm, being a combination of genetic and gradient algorithms, is used
for minimization of the objective function defined as a mean square error between the
approximated and approximating waveforms.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Andrzej KSIĄŻKIEWICZ*
LET-THROUGH ENERGY OF MINIATURE CIRCUIT
BREAKER IN FUNCTION OF PHASE ANGLE OF SHORTCIRCUIT CURRENT
Let-through energy (Joule heat) is an important factor in proper protection of electrical
installations and devices. Studies were preformed during which the relationship between
amount of energy and phase angle of short-circuit current was examined. Typically used
miniature circuit breaker was utilized as a protective device. Scilab software for numerical
computation was used to calculate the let-through energy based on recorded oscillograms of
short-circuit current. Results of this calculations are presented.
KEYWORDS: MCB, let-through energy, Joule's heat
1. MINIATURE CIRCUIT BREAKERS CONSTRUCTION
Figure 1 shows schematically the main parts of a low voltage circuit breaker
and its four essential functions [1]:
– circuit-breaking components, comprising the fixed and moving contacts and the
arc-dividing chamber,
– latching mechanism which becomes unlatched by the tripping device on
detection of abnormal current conditions, this mechanism is also linked to the
operation handle of the breaker,
– trip-mechanism actuating device:
either: a thermal-magnetic device, in which a thermally-operated bi-metal
strip detects an overload condition, while an electromagnetic striker pin
operates at current levels reached in short-circuit conditions, or
an electronic relay operated from current transformers, one of which is
installed on each phase,
– space allocated to the several types of terminal currently used for the main
power circuit conductors.
Use of miniature circuit breakers (MCB) as protection devices for electrical
installations is required by Polish law [2].
__________________________________________
* Poznan University of Technology.
60
Andrzej Książkiewicz
Fig. 1. Main parts of a circuit breaker
Miniature circuit breakers are used as protection devices against overload and
short-circuit currents. Basic principles on how to protect electrical circuits and
devices against this hazards are known and described in many publications [3, 4].
However there are not many information on the influence of phase angle on shortcircuit current and the let-through energy (Joule heat).
2. TEST CIRCUIT AND RESULTS
Joule heat is the energy in joules liberated in one ohm of resistance in a circuit
protected by a fuse is equal to the value of the operating I2t expressed in A2•s [5].
In is also referred to as let-through energy as a parameter used for proper selection
of protecting device for electrical installations (eq. 1).
i dt A s
2
2
(1)
In order to evaluate the relation between phase angle and the let-through energy
a test circuit was created (Fig. 2). Its main parts were a miniature circuit breaker,
with nominal current of 16 amperes and B-type characteristic, an electromagnetic
relay, used to close the circuit, and a synchronization device, which enabled to
close the circuit at a specific phase angle. Parameters of test circuit are presented in
Table 1. Test circuit was measured using a Metrel MI 2086 EUROTEST 76155
multifunctional digital measuring instrument for low voltage electrical installation
safety. Prospective current was set close to a value of 10 IN of used MCB. The
circuit has a high power factor of 0,998, so we can treat that supply voltage and
current are phase alainged.
Let-through energy of miniature circuit breaker in function of phase angle ...
61
Fig. 2. Test circuit schematic: R – electromagnetic relay, MCB- miniature circuit breaker,
Rlim – limiting resistor, SYNCH – phase synchronization device
Table 1. Test circuit parameters
Impedance
Z
Reactance
X
Resistance
R
Prospective
current
IK
Power factor
cos φ
[Ω]
[Ω]
[Ω]
[A]
[-]
1,49
0,08
1,49
162
0,998
For each of nine arbitrary selected phase angles five test were conducted. Using
a GDS-3154 digital oscilloscope and HAMEG HZO51 current probe the shortcircuit current was measured. Acquired data was then processed in Scilab as
described in [6]. For each set phase the let-through energy (Joule heat), maximum
current and short-circuit times were calculated. Average values obtained are
presented in Table 2. Selected current-time oscillograms for different set phase
angles are presented on Figure 3.
For five phase angels: 20º, 40º, 60º, 80º and 100º short-circuit time was in range
between 10 and 4,5 ms, with shorter times observed for higher phase angles. This
can be correlated with current reaching zero value every 10 ms and thus the MCB
can break the short-circuit current naturally. For 120º, 140º and 160º short-circuit
time often exceeded 10 ms. It can be assumed that there is a relationship between
this fact and the miniature circuit breaker opening time. Since the main contacts of
MCB haven’t started to open there is no contact gap.
62
Andrzej Książkiewicz
Fig. 3. Short-circuit current graph for different set starting phase
Table 2. Average values of let-through energy, maximum current and short-circuit time
for different set starting phase
Let-through energy
2
Max current i
Short-circuit
time tZ
[º]
[A2s]
[A]
[ms]
0
201,03
217,08
9,85
20
197,55
218,03
9,11
40
190,84
219,60
10,98
60
176,61
220,16
8,11
80
138,93
217,64
7,48
100
87,70
205,97
4,54
120
116,43
183,69
8,85
140
204,62
218,12
11,57
160
195,04
217,14
11,00
Phase angle
∫
i dt
Let-through energy of miniature circuit breaker in function of phase angle ...
63
There is also a requirement that the current reaches at least value of 80 amperes in
order to trigger the circuit breaker mechanism. For high phase angles that isn't
always true. Summing the above statements the break process for high phase
angles may start after the current reaches zero. This also explains higher shortcircuit current times.
With this higher times the let-through energy rises, according to eq. 1. Figure 4
presents the relationship between let-through energy and phase angle of shortcircuit current.
Fig. 4. Average value of let-through energy for different set starting phase
It can be seen that, similar as with short-circuit time, Joule heat reaches lower
values for higher phase angles up to 100º. With higher short-circuit times letthrough energy rises. For phase angles up to 40º the difference between energy
level is minimal.
Different conclusions can be drawn for the maximum short-circuit current
values, as there is no apparent relation between its value and the phase angle.
Because there is little or none inductance in the circuit short-circuit current can
reach high values almost instantly, phased with source voltage value. This can be
observed on figure 3 for short-circuit current oscillograms for 40º to 160º. At the
beginning for short-circuit the current values rises fast in a very short time.
64
Andrzej Książkiewicz
3. CONCLUSION
Use of miniature circuit breakers is obligatory so it seems important to know
every aspect of how they work. There is a clear relation between phase angle and the
let-through energy (also true for short-circuit time). High values of Joule heat can be
observed for low, between 0º and 60º, and high, above 140º, phase angles. That
means the thermal effects for the electrical circuit and devices protected by MCB
differ with different phase angle and this relation isn't linear. However there is no
obvious change of maximum short-circuit current value with change of phase angle.
REFERENCES
[1] Schneider Electric, Electrical installation guide, 2009.
[2] Rozporządzenie Ministra Infrastruktury z dn. 12 kwietnia 2002 r. w sprawie
warunków technicznych, jakim powinny odpowiadać budynki i ich usytuowanie,
(Dz. U. nr 75, poz. 690 z późn. zm.) (in Polish).
[3] Markiewicz H., Urządzenia elektroenergetyczne, WNT, Warszawa, 2006 (in Polish).
[4] Niestępski S. et al, Instalacje elektryczne: budowa, projektowanie i eksploatacja, PW
2011 (in Polish).
[5] IEC 60050-441
[6] Książkiewicz A., Use of free and open-source software in analysing experimental
research data, Poznan University of Technology Academic Journals. Electrical
Engineering, No 69, 2012, p. 193-198.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Andrzej KSIĄŻKIEWICZ*
Jerzy JANISZEWSKI*
ELECTRICAL CONTACT TEMPERATURE CHANGE
AFTER SHORT-CIRCUIT CURRENT
Theoretical analysis is preformed concerning temperature rise of electrical contacts
exposed to short-circuit current. This temperature is calculated for three different contact
materials: AgNi, AgCdO and AgSnO2, used in low voltage electromagnetic relays. An
assumption is made that the heat process is adiabatic. Amount of heat is calculated based on
let-through energy (Joules heat) of miniature circuit breaker and on real electrical contact
resistance. A simplified model of electrical contact heating is proposed.
KEYWORDS: contact materials, contact resistance, Joule's heat
1. CONTACT MATERIALS USED IN ELECTROMAGNETIC RELAYS
Electrical contacts are exposed to various hazards during their life cycle. To
analytically present them many simplifying assumptions have to be made because of
the complexity of considered issues. Those hazardous phenomena include thermal
risks. One of them is high short-circuit current that leads to high temperature rise of
contact spot and may cause contact welding or may reduce relay life time.
Many different materials are used for electrical contacts, and most commonly
utilized in low voltage relays are AgNi, AgSnO2 and AgCdO. Few selected
physical and electrical properties are presented in Table 1.
Table 1. Selected contact materials properties
Density
Melting
point
temperature
Hardness
Thermal
conductivity at
20 ºC
Electrical
conductivity
[g/cm3]
[ºC]
[HB]
[W/(K m)]
[m/(Ωmm2)]
AgNi10
10,3
961
50
350
54
AgCdO10
10,2
961
70
313
48
AgSnO210
9,9
961
70
307
49
Material
__________________________________________
* Poznan University of Technology.
66
Andrzej Książkiewicz, Jerzy Janiszewski
2. POINT HEAT SOURCE AS A CONTACT SPOT
Electromagnetic relays are often used as parts of actuators used in building
automation systems such as KNX, LCN or any other Building Management System
(BMS). These systems include traditional electrical installations. This installations
and electrical devices used in them have to be properly protected against shortcircuit currents. For this purpose the Miniature Circuit Breakers (MCBs) are used.
Important parameter of MCBs is let-through energy, that defines the amount of
energy which electrical circuit and devices in it have to withstand. This factor will
be used in later calculations of contact spot temperature.
Real contact spot of electrical contacts is significantly smaller than contact rivet
[1, 2, 3, 4, 5]. Electrical current is conducted through this spots, called a-spots [3,
4, 5]. Because these a-spots are so small in diameter there is a high temperature rise
on them [6]. A short-circuit current, which reaches a lot higher values than nominal
current of the relay, can generate so much heat that the contact material in that aspot can be melted and create a weld [7]. In order to calculate rise of a-spot
temperature a model is proposed based on this presumptions:
– electric contacts are closed, no electrical arc influence,
– real contact area is represented as a single a-spot,
– this a-spot is treated as a point heat source (PHS) in an infinite space.
Figure 1 shows the heat source in infinite space [8]. Assuming that inner radius
rw 0 we can treat this heat source as a single point that generates energy Q.
Fig. 1. Heat Source in infinite space [8]
Temperature rise created by this PHS can be calculated using eq. 1, where: Q –
amount of energy generated in heat source, c – specific heat, ρ – density, a – temperature
compensation coefficient a =
λ
, t – time, r – radius, distance from PHS.
c ρ
Electrical contact temperature change after short-circuit current
Θ=
Q
3
c ρ 4 π a t 2
r2
e 4 a t
67
(1)
Important issue was to bind the energy Q with let-through energy of MCB.
Using know electrical contact resistance Rk and the let-through energy amount of
energy generated by a short-circuit current can be calculated using eq. 2.
Q = i 2 dt Rk J
(2)
A script was written using Scilab scientific program for numerical calculations
(Fig. 2).
Fig. 2. Point Heat Source (PHS) function realization in Scilab
The PHS function calculates temperature rise based on equation 1. Its
parameters are: I2t – let-through energy, Rz – contact resistance, r – distance form
point heat source, t – time, l - thermal conductivity, c – specific heat, ro – density
of the material.
3. RESULT OF CALCULATIONS
With help of this program calculations were made for three contact materials
(table 1) and two different let-through energy values: 2 kA2s and 15 kA2s. These
values were take from data sheet of a typical MCB for two prospective short-circut
current values of 1 kA and 6 kA respectively.
Radius r was calculated using eq. 3. It defines the a-spot radius assuming that
the contact spot is a singe sphere. This radius is a function of contact force F and
contact material hardness HB. The ξ coefficient was assumed equal to one. Contact
force was measured on electromagnetic relays under question.
rZ =
F
π ξ HB
(3)
Contact resistance RZ was measured on the same relays as contact force.
Presented value is a median from 10 measurements of contact resistance. Resulting
values of contact resistance and a-spot radius are presented in Table 2. Time t was
68
Andrzej Książkiewicz, Jerzy Janiszewski
equal to 10 ms, which is a typical short-circuit time for a circuit with high power
factor cos φ ≈ 0,998 and protected by a MCB.
Table 2. Contact resistance and contact spot size
RZ
rZ
[mΩ]
[μm]
AgNi
1,445
11,95
AgCdO
4,745
9,63
AgSnO2
8,876
10,77
Material
Based on data presented earlier in Table 1 and 2 contact spot temperature rise Θ
was calculated using the Scilab script and the results are presented in Table 3.
Table 3. Contact spot temperature rise depending on contact material
and let-through energy
Let-through energy
∫
i 2 dt = 2000 A2s
Q
θmax
[J]
[K]
AgNi
2,89
15,70
AgCdO
9,49
62,61
AgSnO2
17,75
Material
Let-through energy
112,78
∫
2
i dt = 15000 A2s
AgNi
21,68
117,77
AgCdO
71,18
466,59
AgSnO2
133,14
845,88
For the three analysed contact materials with the rise of contact resistance the
temperature rise increases. This rise is only around 16 degrees Kelvin for the AgNi
contact material up to 113 degrees Kelvin for AgSnO2 with AgCdO in the middle
for the let-through energy of 2 kA2s. Although high, these temperatures are way
below melting point temperature of contact materials used in this relays. We can
assume that they do not present real threat for the normal operation of relays under
tests. The same situation is with energy level Q for three three contact materials.
Electrical contact temperature change after short-circuit current
69
For the 15 kA2s let-through energy the temperature rise for AgSnO2 reaches a
value high enough that may result in contact spot material melting temperature. For
the two remaining materials the temperature rise reaches high values, but below the
melting point.
For this calculations the radius r was equal to the contact spot diameter rZ as
defined by eq. 3 and shown in table 2. If the heat penetration was greater, that is
radius r had higher values, the temperature rise would have been less significant.
Figure 3 shows the temperature rise for three contact materials and two let-through
energy values in question.
Fig. 3. Contact spot temperature as a function of penetration depth radius for two considered
letthrough energy values
Radius r can not be grater than the real dimensions of contact rivet. It is clear
that with greater penetration depth the temperature rise is smaller, as more material
absorbs the energy.
Change in temperature rise in function of r is negligible for AgNi contact, as it
had the lowest contact resistance. As for AgSnO2 and AgCdO contact materials
temperature decreases with higher r values. However with low r, less than 0,2 mm,
70
Andrzej Książkiewicz, Jerzy Janiszewski
the difference between the temperature rise is insignificant. It can lead to a
conclusion that if the real a-spot radius would be higher, for example with higher
contact force F, the temperature rise wouldn't change drastically.
4. CONCLUSION
Presented model of contact spot heating with point heat source has to be
verified practically. First results appear to be probable for the presented conditions.
Model itself can be improved by taking into account that the temperature is not
conducted in every direction the same way. Instead of a single point heat source a
small surface heat source can be used.
REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
[7]
Au A., Maksymiuk J., Pochanke Z., Podstawy obliczeń aparatów
elektroenergetycznych, WNT, Warszawa, 1976 (in Polish).
Ciok Z., Procesy łączeniowe w ukłądach elektroenergetycznych, WNT, Warszawa,
1983 (in Polish).
Braunovic M., Konchits V., Myshkin N., Electrical Contacts. Fundamentals,
Applications and Technology, CRC Press, 2007.
Greenwood J. A., Constriction resistance and the real area of contact, Volume 17,
Issue 12, 1966, p. 1621-1632.
Timsit, R.S., Electrical conduction through small contact spots, Proceedings of the
50th IEEE Holm Conference on Electrical Contacts and the 22nd International
Conference on Electrical Contacts Electrical Contacts, 2004, p. 184 - 191.
Książkiewicz A., Batura R., Thermal and electrodynamic characteristics of
electrical contacts in steady state, Computer Applications in Electrical Engineering,
2013, p. 137-142.
Li Zhenbiao, Cheng Lichun, Zou Jiyan, The metallurgical research on contact
surface deterioration of AgNi, AgW, AgFe, AgCu contact materials, Proceedings of
the Forty-First IEEE Holm Conference on Electrical Contacts, 1995, p. 346 – 349.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Piotr MILLER*
Marek WANCERZ*
WYKORZYSTANIE BAZ DANYCH W APLIKACJI
REALIZUJĄCEJ OBLICZANIE NASTAWIEŃ
ZABEZPIECZEŃ PÓL ŚREDNIEGO NAPIĘCIA
W artykule zaprezentowano program komputerowy, wykorzystujący bazę danych
w formacie MS Access, którego zadaniem jest ułatwienie ewidencji i obliczania nastaw
zabezpieczeń pól w sieci SN. Zadaniem bazy danych jest gromadzenie informacji
dotyczących topologii sieci, parametrów elementów wchodzących w jej skład oraz
zastosowanych zabezpieczeń i ich nastaw. Interfejs aplikacji wspomaga proces budowy
topologii sieci oraz doboru zabezpieczeń i ich nastaw. Umożliwia także sprawdzanie
skuteczność działania zabezpieczeń poprzez kontrolę ich czułości, zasięgu, rezerwowania
oraz koordynacji czasów działania.
SŁOWA KLUCZOWE: bazy danych, Elektroenergetyczna Automatyka Zabezpieczeniowa,
sieci średniego napięcia, zabezpieczenia pół średniego napięcia, algorytmy nastawieniowe
1. WSTĘP
Procesy związane z doborem i nastawianiem zabezpieczeń pól średniego
napięcia
(liniowych,
transformatorowych,
potrzeb
własnych,
baterii
kondensatorów, pomiarowych itp.) wymagają uwzględnienia wielu czynników. Są
to przede wszystkim:
konfiguracja sieci,
sposób pracy punktu neutralnego sieci,
parametry elektryczne zabezpieczanych elementów.
Czynniki te mają podstawowe znaczenie przy wyborze rodzaju zabezpieczenia
co z kolei przekłada się na skuteczność jego działania. Przystępując do wyboru i
konfiguracji zabezpieczeń należy więc koniecznie dysponować kompletem
informacji pozwalających zrealizować to zadanie.
Informacje te powinny być łatwo dostępne i przechowywane w sposób
bezpieczny. Spełnienie tych postulatów zapewniają systemy baz danych
wykorzystywane nie tylko w energetyce [4, 7], ale także w wielu innych
dziedzinach.
__________________________________________
* Politechnika Lubelska.
72
Piotr Miller, Marek Wancerz
W artykule opisano program komputerowy (aplikacja Katalog ZSN), który
korzysta z bazy danych Microsoft Access [3]. Jest to baza danych typu desktop,
przeznaczona głównie do wykorzystania przez jednego użytkownika. Łatwo można
jednak przekształcić aplikację i dostosować ją do współpracy z innym, bardziej
profesjonalnym systemem baz danych. Zasada działania oraz oferowana
funkcjonalność aplikacji będą takie same.
2. TOPOLOGIA SIECI SN
Centralnym punktem aplikacji Katalog ZSN (jej menu głównym) jest lista GPZ.
Pojęcie GPZ stosowane w aplikacji jest potraktowane nieco szerzej niż
w rzeczywistości i wymaga wyjaśnienia. W systemie elektroenergetycznym GPZ
(Główny Punkt Zasilający) to rozdzielnia SN w stacji 110/SN, która pełni rolę punktu
zasilającego sieci SN. W opisywanej aplikacji na listę GPZ trafiają wszystkie te
elementy systemu elektroenergetycznego (reprezentowane przez obiekty bazy danych),
w których znajdują się pola wyposażone w automatykę zabezpieczeniową. Na liście
GPZ można więc znaleźć rozdzielnie 110 kV, w których zainstalowane są
zabezpieczenia pól transformatorowych i pomiarowych, właściwe GPZ, czyli
rozdzielnie SN zasilane z transformatora 110/SN, a także RS (Rozdzielnie Sieciowe) i
PZ (Punkty Zasilające) zlokalizowane w głębi sieci SN. Założono więc, że GPZ w
pojęciu aplikacji, to każdy punkt sieci, z którego wychodzą (bądź do którego wchodzą)
pola wymagające zastosowania automatyki zabezpieczeniowej. Założono także, że
rozdzielnie 110 kV, bądź rozdzielnie SN, które pracują zwykle z otwartym
wyłącznikiem w polu sprzęgłowym, będą podstawą do utworzenia dwóch pozycji na
liście GPZ w aplikacji (każdy z nich będzie zasilał odrębną sieć SN). W celu
odróżnienia poszczególnych rodzajów GPZ (w rozumieniu aplikacji) utworzono cztery
typy obiektów bazy danych reprezentujących GPZ w aplikacji:
GPZ 110 kV – wydzielony system szyn w rozdzielni 110 kV,
GPZ SN – wydzielony system szyn w rozdzielni SN zasilanej bezpośrednio
transformatorem 110/ SN,
RS – rozdzielnia sieciowa zlokalizowana w głębi sieci SN zasilania
bezpośrednio z GPZ SN, bądź z innej rozdzielni sieciowej,
PZ – punkt zasilający zlokalizowany w głębi sieci SN zasilany bezpośrednio z
GPZ SN bądź RS.
Omawiane typy GPZ tworzą punkty węzłowe sieci, której topologię można
odwzorować w aplikacji.
Pola, będące częścią składową obiektów typu GPZ oraz skojarzone z nimi elementy
systemu elektroenergetycznego (linie, transformatory, baterie kondensatorów itp.),
pełną rolę gałęzi łączących poszczególne punkty węzłowe. W aplikacji przewidziano
możliwość wprowadzania siedmiu różnych typów pól. Są to:
pola liniowe odbiorcze,
Wykorzystanie baz danych w aplikacji realizującej obliczanie nastawień …
73
pola liniowe synchroniczne (zasilające),
pola transformatorowe,
pola transformatora potrzeb własnych,
pola łącznika szyn,
pola baterii kondensatorów,
pola pomiaru napięcia.
Tylko GPZ typu GPZ SN udostępnia możliwość wprowadzenia każdego z
powyższych typów pól. GPZ pozostałych typów wprowadzają tutaj pewne
ograniczenia. W GPZ 110 kV dostępne są tylko pola transformatorowe i pola
pomiaru napięcia. W RS brakuje pola baterii kondensatorów, natomiast w PZ
można tworzyć tylko pola liniowe odbiorcze. Interfejs aplikacji odpowiada za to,
żeby dostępność poszczególnych typów pól była ściśle skorelowana z typem GPZ.
Z każdym polem skojarzony jest konkretny element systemu
elektroenergetycznego, którego typ jest ściśle zależny od typu pola. Każdy z tych
elementów opisany jest zestawem parametrów, których wartości są
wykorzystywane przy wyznaczaniu nastaw zabezpieczeń służących do ochrony
tych elementów. Zestaw parametrów opisujących element jest także zależny od
jego typu (i jednocześnie od typu pola).
3. ZABEZPIECZENIA PÓL SIECI SN
Podstawowym celem aplikacji Katalog ZSN jest wspomaganie procesu doboru
i obliczania nastawień zabezpieczeń chroniących pola poszczególnych typów oraz
skojarzonych z nimi obiektów elektroenergetycznych. W aplikacji uwzględniono
wszystkie wymagane rodzaje zabezpieczeń przewidziane do ochrony linii
elektroenergetycznych, transformatorów, baterii kondensatorów, a także łączników
szyn i pól pomiarowych [1, 5, 6, 8]. Logika zaimplementowana w aplikacji, której
jednym z elementów jest tabela zaprezentowana na rys. 1, automatycznie dobiera
rodzaje zabezpieczeń do ochrony pól poszczególnych typów. Takie rozwiązanie
pozwala na elastyczne jej dopasowanie do wymagań związanych z rodzajami
stosowanych zabezpieczeń, przy czym zaawansowany użytkownik, mający
uprawnienia do modyfikacji obiektów bazy danych może te wymagania zmieniać
w trakcie działania aplikacji.
Poszczególnym rodzajom zabezpieczeń odpowiadają kryteria wykrywania
stanów zakłóceniowych [5, 8]. Są one zależne nie tylko od typu pola (i
zabezpieczanego obiektu) ale także od rodzaju zabezpieczenia. Także w tym
przypadku zależności te zostały odwzorowane w bazie danych przy pomocy tabeli,
której fragment zaprezentowano na rys. 2. Rozwiązane to pozwala w sposób
elastyczny przyporządkować kryteria wykrywania stanów zakłóceniowych do
poszczególnych rodzajów zabezpieczeń uwzględniając jednocześnie typ pola
i chronionego obiektu.
74
Piotr Miller, Marek Wancerz
Rys. 1. Rodzaje zabezpieczeń i ich przyporządkowanie do typów pól
Rys. 2. Kryteria wykrywania stanów zakłóceniowych i ich przypisanie do rodzajów zabezpieczeń
i poszczególnych typów pól – fragment tabeli danych
4. BAZA DANYCH
Bazę danych, będącą tzw. back end aplikacji Katalog ZSN [2], tworzy ponad
40 tabel przechowujących wszystkie dane przez nią wykorzystywane. Część z tych
tabel reprezentuje obiekty elektroenergetyczne opisane w poprzednich punktach
wraz z parametrami je charakteryzującymi. Są to obiekty typu GPZ, pola,
chronione elementy systemu oraz zabezpieczenia. Niektóre z tych tabel pełnią rolę
tzw. tabel słownikowych [2], które pozwalają wprowadzić podziały obiektów bazy
danych na poszczególne typy i kategorie. Typy GPZ, typy pól, rodzaje
zabezpieczeń oraz kryteria wykrywania zakłóceń, to przykłady tabel
słownikowych, przy czym w omawianej aplikacji rozszerzono ich funkcję
wprowadzając pewne elementy logiki, pozwalającej np. przypisać właściwe typy
pól do obiektów typu GPZ, czy też właściwe rodzaje zabezpieczeń do
poszczególnych typów pól. Działanie tej logiki scharakteryzowano w p.3. Tabele
łączące [2] pozwalają z kolei odwzorować topologię zabezpieczanej sieci oraz
przyporządkować obiekty chronione do pól poszczególnych typów. Na rys. 3
zaprezentowano fragment diagramu ERD (ang. Entity Relationship Diagram)
opisywanej bazy danych.
Wykorzystanie baz danych w aplikacji realizującej obliczanie nastawień …
75
5. PROGRAM KATALOG ZSN
Na podstawie opisanych w poprzednich punktach zagadnień informatycznych
oraz energetycznych opracowana została aplikacja bazodanowa – Katalog ZSN,
która umożliwia nastawianie i ewidencję zabezpieczeń elementów sieci SN.
System informatyczny, który ma wspierać pracę inżyniera zabezpieczeniowca musi
zawierać następujące elementy składowe:
bazę danych z tabelami przechowującymi wszystkie dane niezbędne do pracy z
programem – opis topologii, wybór zabezpieczanego elementu oraz jego
parametry, typy zabezpieczeń oraz parametry nastawieniowe,
narzędzia eksportu i importu danych do zewnętrznych programów
obliczeniowych (programy realizujące obliczenia rozpływowe i zwarciowe),
biblioteka DLL udostępniająca algorytmy obliczania parametrów zwarciowych,
moduł generujący karty nastawień dobranych zabezpieczeń.
Rys. 3. Fragment diagramu ERD bazy danych aplikacji Katalog ZSN
Ekranem startowym prezentowanej aplikacji bazodananowej jest formularz
Lista GPZ (rys. 4). Z tego poziomu można dokonywać przeglądu wprowadzonych
już rozdzielni, dodawać je do bazy lub usuwać. Prezentowane są: nazwa kodowa,
nawa długa (pełna), poziom napięcia oraz typ rozdzielni.
76
Piotr Miller, Marek Wancerz
Każde okno programu udostępnia przyciski pozwalające przeprowadzić
zaawansowane operacje edycyjne, sortowanie oraz wyszukiwanie. Algorytmy
dostępne w opisywanej bazie danych pozwalają na dodawanie, modyfikację lub
usuwanie istniejących obiektów, dowolne sortowanie oraz wyszukiwania obiektów
(dostępna jest bardzo duża liczba kryteriów). W celu usprawnienia pracy z aplikacją
zostały zaimplementowane liczne funkcje ułatwiające pracę z bazą danych, np. nie
można przyłączyć linii do GPZ’tu, którego nie ma w bazie, nie można usunąć typu
zabezpieczenia gdy ma ono opisane parametry, nie można usunąć obiektu gdy posiada
on zdefiniowane zabezpieczenia, dobór właściwego zabezpieczenia uzależniony jest od
sposobu pracy punktu neutralnego sieci i wiele innych. Możliwości systemu zostaną
zaprezentowane na przykładzie pola liniowego 15 kV. Po wybraniu przez użytkownika
interesującego GPZ’u możliwe jest przejście do jego edycji (rys. 5.).
Rys. 4. Ekran startowy – lista GPZ’ów
Prezentowany zestaw parametrów dotyczy: charakterystyki sieci SN, lokalizacji
GPZ, zastosowanej automatyki i urządzeń pomiarowych oraz widoczna jest lista
zadeklarowanych pól wychodzących z danego GPZ’u. Wybór sposobu pracy
punktu neutralnego sieci, który decyduje min. o zastosowanych zabezpieczeniach
ziemnozwarciowych sprowadza się do wyboru z listy: sieci izolowanej,
kompensowanej, uziemionej przez rezystor lub skutecznie uziemionej (dotyczy
GPZ 110 kV).
Wykorzystanie baz danych w aplikacji realizującej obliczanie nastawień …
77
W zależności od wyboru sposobu pracy punktu neutralnego sieci zmienia się
liczba parametrów niezbędnych do prawidłowego jej opisu. Dla sieci pracującej
z izolowanym punktem neutralnym charakterystyka takiej sieci sprowadza się do
podania wartości całkowitego pojemnościowego prądu zwarcia z ziemią, natomiast
w przypadku sieci kompensowanej zakres parametrów rozszerza się o dodatkowe
parametry związane z działaniem min. układów automatyki wymuszającej AWSC,
AWSB oraz układów umożliwiających nadążną regulację prądu dławika
kompensującego.
Rys. 5. Parametry opisujące GPZ SN
Przykład opisu sieci z punktem neutralnym uziemionym przez rezystor
przedstawiono na rys. 5. Bardzo przydatnymi funkcjami aplikacji jest możliwość
obliczenia mocy zwarciowej na szynach GPZ (komunikacja z programem
zwarciowym poprzez bibliotekę dll), ustalenie maksymalnego czasu pracy
zabezpieczeń odchodzących od analizowanej rozdzielni (parametr niezbędny do
koordynacji czasów działania zabezpieczeń) czy automatycznego doboru
przekładni przekładników pomiarowych. Ostatnią z omawianych części formularza
edycyjnego GPZ-tu jest część dotycząca pól odpływowych i zasilających. W
aplikacji przewidziano możliwość wprowadzania 7 różnych typów pól. Po
wybraniu pola można przejść do jego edycji. Na rys. 6 przedstawione zostały
podstawowe informacje opisujące pole liniowe.
Użytkownik z listy rozwijanej wybiera rodzaj oraz dedykowane kryterium
zabezpieczeniowe (przy czym dostępne rodzaje zabezpieczeń uzależnione są od
typu pola, natomiast kryterium zależy od wybranego typu zabezpieczenia).
Najistotniejszą funkcją bazy danych jest wspieranie procesu doboru zabezpieczeń.
78
Piotr Miller, Marek Wancerz
Z uwagi na ograniczoną objętość artykułu zaprezentowane zostaną jedynie
zabezpieczenia nadprądowe pól liniowych. Na podstawie ogólnie znanej teorii [1,
6, 8], proces doboru nastaw zabezpieczeń oraz sprawdzenia czułości ich działania
został zautomatyzowany.
Rys. 6. Parametry pola liniowego oraz zdefiniowane typy zabezpieczeń
Na rysunku 7 przedstawiono formularz dotyczący doboru zabezpieczenia
nadprądowego.
Rys. 7. Proces doboru zabezpieczenia nadprądowego zwłocznego linii SN
Wykorzystanie baz danych w aplikacji realizującej obliczanie nastawień …
79
Proces doboru zabezpieczenia obejmuje min. ustalenie współczynników
niezbędnych do obliczenia prądu rozruchowego (można wybrać wartości
domyślne), obliczenie prądu rozruchowego maksymalnego i minimalnego (na
podstawie prezentowanych wzorów), wybór wartości nastawieniowych oraz
sprawdzenie czułości i selektywności zabezpieczenia. Przy niewłaściwie
dobranych nastawach system ostrzega użytkownika o konieczności korekty
parametrów zabezpieczenia (rys. 8).
Rys. 8. Przykład procesu weryfikacji nastawień
Inne przykłady wspierania procesu decyzyjnego w nastawianiu zabezpieczeń
przedstawiono na rys. 9. Prezentowane możliwości bazy danych nie oddając
wszystkich jej atutów i zalet. Opisanie wszystkich zastosowanych zabezpieczeń wraz
przedstawieniem procedur ich doboru wykracza poza ramy niniejszego artykułu.
Program pozwala na dobór kilkudziesięciu różnych zabezpieczeń uzależnionych od
rodzaju pola, dobór automatyki SPZ i SZR, zabezpieczeń łukoochronnych,
odwzorowanie topologii sieci jak również obliczenia wielkości zwarciowych.
a)
b)
Rys. 9. Przykłady wspierania procesu doboru zabezpieczeń
a) i b) dla zabezpieczenia kierunkowego - mocowego
Podobną funkcjonalność wspierania procesu nastawiania zabezpieczenia
zastosowano dla pozostałych typów i kryteriów zabezpieczeniowych. Inny jest
oczywiście sposób wyznaczania tych parametrów oraz ich liczba. Po wprowadzeniu
wszystkich pól GPZ’u oraz nastawieniu zabezpieczeń możliwe jest sprawdzenie
koordynacji czasowej wszystkich zabezpieczeń. Możliwe jest również wydrukowanie
kart nastawień z podstawowymi informacjami na temat zabezpieczanego obiektu jak
również zastosowanych zabezpieczeń i automatyki EAZ. Należy podkreślić również
walory prezentowanej aplikacji jako zaawansowanego narzędzia do ewidencji
GPZ’ów, pół odpływowych i zasilających oraz zabezpieczeń i ich parametrów.
80
Piotr Miller, Marek Wancerz
6. PODSUMOWANIE
Zagadnienia związane z doborem i obliczaniem nastaw zabezpieczeń w sieci
SN jest bardzo ciekawym problemem zarówno o znaczeniu teoretycznym jak
i praktycznym. W artykule nie zagłębiano się w zagadnienia dotyczące teorii
zabezpieczeń [5, 6, 8], nie omawiano teorii baz danych, jednak teoria ta znalazła
zastosowanie praktyczne w prezentowanej aplikacji. Aplikacja ta ma szanse stać
się użytecznym narzędziem, które w rękach inżyniera zajmującego się
zabezpieczeniami w sieci SN może być cennym wsparciem działań zmierzających
do poprawy bezpieczeństwa pracy sieci.
LITERATURA
[1] Borkiewicz K.: Automatyka zabezpieczeniowa, regulacyjna i łączeniowa w systemie
elektroenergetycznym, 3rd ed. Bielsko-Biała: "ZIAD" 1998, ISBN 83-909323-0-X.
[2] Garcia-Molina H., Ullman J. D., Widom J., Jurkiewicz M.: Systemy baz danych: Pełny
wykład. Warszawa: Wydawnictwa Naukowo-Techniczne 2006, ISBN 83-204-3082-8.
[3] Groh M., Meryk R.: Access 2010 PL: Biblia : wiedza obiecana. Gliwice:
Wydawnictwo Helion op. 2013, ISBN 978-83-246-7102-1.
[4] Kacejko P., Wancerz M., Miller P.: “Internetowe bazy danych – perspektywa
zastosowania w EAZ”, Automatyka Elektroenergetyczna, Nr 4, str. 5–10, 2005.
[5] Korniluk W., Woliński K. W.: Elektroenergetyczna automatyka zabezpieczeniowa.
Białystok: Wydawnictwo Politechniki Białostockiej 2008, ISBN 978-83-60200-62-9.
[6] Lorenc J.: Admitancyjne zabezpieczenia ziemnozwarciowe. Poznań: Wydawnictwo
Politechniki Poznańskiej 2007, ISBN 978-83-7143-342-9.
[7] Wancerz M., Miller P.: “Problematyka wyznaczania i ewidencji parametrów linii WN
z wykorzystaniem baz danych.”, Poznan University of Technology Academic
Journals. Electrical Engineering, Nr 74, str. 127–136, 2013.
[8] Winkler W., Wiszniewski A.: Automatyka zabezpieczeniowa w systemach
elektroenergetycznych. Warszawa: Wydawnictwa Naukowo-Techniczne 1999, ISBN
83-204-2287-6.
DATABASES USED IN AN APPLICATION DESIGNED TO CALCULATE
PROTECTION SETTINGS FOR MEDIUM VOLTAGE FIELDS
This paper presents a computer software that uses a database of the MS- Access format
and is meant to facilitate management of protection setting calculations for fields in a MV
network system. The database collects and saves information about the network topology,
parameters of its component elements and about the applied protections together with their
settings. Interface of the application supports the process of the network topology
development and the selection of protections and their settings. It also makes possible to
check efficiency of the protection operation by checking their sensitivity, operation range,
redundancy and coordination of the operation times.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Ryszard FRĄCKOWIAK*
Piotr PIECHOCKI**
WARTOŚCI CZASU TRWANIA ZWARCIA PODCZAS
ZAKŁÓCEŃ W ROZDZIELNIACH NAJWYŻSZYCH NAPIĘĆ
W ŚWIETLE BADAŃ SYMULACYJNYCH
Prezentowana problematyka jest kontynuacją badań dotyczących oceny wartości czasu
trwania zwarcia w obliczeniach skutków zwarciowych metodą probabilistyczną. W
artykule przedstawiono opracowany model symulacyjny czasu trwania zwarcia podczas
zakłóceń w rozdzielniach. Model oparto na analizie działania elektroenergetycznej
automatyki zabezpieczeniowej EAZ i wyłączników w rozdzielniach najwyższych napięć
podczas zwarć. Przedstawiono wyniki badań symulacyjnych, mających na celu
oszacowanie częstości występowania określonych wartości czasu trwania zwarcia.
Obliczenia wykonano dla różnych konfiguracji układu EAZ.
SŁOWA KLUCZOWE: czas trwania zwarcia, rozdzielnie najwyższych napięć, symulacja
1. WSTĘP
Podstawę do określenia warunków zwarciowych stanowi znajomość przebiegu
prądu zwarciowego i jego charakterystycznych parametrów. W ogólnym
przypadku parametry te mają charakter losowy [1]. Ze względów praktycznych
wielkości zwarciowe wyznacza się metodami deterministycznymi przyjmując
szereg założeń upraszczających. Jednym z istotnych parametrów wpływających na
skutki cieplne i dynamiczne jest czas trwania zwarcia. Przyjmowanie w
inżynierskich analizach niewłaściwych wartości czasu trwania zwarcia może
prowadzić do strat ekonomicznych. W artykule przedstawiono opracowany model
symulacyjny do oceny wartości czasu trwania zwarcia dla zakłóceń w
rozdzielniach w oparciu o metodę probabilistyczną. Badania przeprowadzono dla
zwarć w rozdzielni a przykładową analizę wykonano dla kilku wybranych
konfiguracji EAZ. Wzięto pod uwagę działanie zabezpieczenia różnicowego szyn
zbiorczych ZSZ, zabezpieczeń odległościowych, zabezpieczeń ziemnozwarciowych oraz odcinkowych, a także automatyki samoczynnego ponownego
załączania SPZ oraz układu lokalnej rezerwy wyłącznikowej LRW. Uwzględniono
także uwspółbieżnianie zabezpieczeń na końcach linii - uwb.
__________________________________________
* Politechnika Poznańska.
** Polskie Sieci Elektroenergetyczne – Zachód S.A.
82
Ryszard Frąckowiak, Piotr Piechocki
2. MODEL CZASU TRWANIA ZWARCIA PODCZAS ZAKŁÓCEŃ
W ROZDZIELNI
2.1. Koncepcja modelu
Podstawę do określania czasu trwania zwarcia w obliczeniach skutków
zwarciowych stanowi analiza wartości czasu działania układu EAZ i wyłączników
likwidujących zakłócenia w rozdzielni. Do wyznaczania wartości czasu trwania
zwarcia posłużono się zależnością:
Tk t zab t wył
(1)
gdzie: Tk – czas trwania zwarcia, tzab – czas zadziałania zabezpieczenia, mierzony od
momentu powstania zwarcia do chwili pojawienia się impulsu "wyłącz" na wyjściu
zabezpieczenia, twył - czas zadziałania wyłącznika, mierzony od chwili otrzymania
impulsu „wyłącz” do chwili przerwania prądu zwarciowego.
Ogólną zasadę wyznaczania wartości Tk wg wzoru (1) na drodze symulacji z
wykorzystaniem metody Monte Carlo w postaci kolejnych etapów (rys. 1) bliżej
omówiono w pracy [2].
Rys. 1. Etapy wyznaczania czasu trwania zwarcia na drodze symulacyjnej
Szczegółowe wymagania dotyczące instalowanych zabezpieczeń w polach
rozdzielni WN i NN i elementów automatyki elektroenergetycznej podaje
Instrukcja Ruchu i Eksploatacji Sieci Przesyłowej (IRiESP) [2].
2.2. Schemat i przyjęte założenia
Schemat fragmentu systemu zawierający badaną rozdzielnię 220 kV
przedstawiono na rys. 2, na którym zaznaczono zabezpieczenia oraz wyłączniki
Wartości czasu trwania zwarcia podczas zakłóceń w rozdzielniach …
83
uczestniczące w likwidacji zwarć w rozdzielni (na szynach oraz w polach) a także
zaznaczono przykładowe zasięgi stref uwzględnianych zabezpieczeń. Działanie
zabezpieczeń podczas zwarć na liniach oraz zasadę budowy programu
komputerowego do wyznacznia czasu trwania takich zwarć omówiono w pracy [3].
Rys. 2. Schemat rozdzielni 220 kV uwzględnianej w obliczeniach symulacyjnych
2.3. Ogólny algorytm obliczeń i program komputerowy
Ogólny algorytm wyznaczania czasu trwania zwarcia w rozdzielni
przedstawiono na rys. 3. Algorytm podzielony jest na dwie zasadnicze części.
Pierwsza dotyczy zwarć na szynach i we fragmentach pól rozdzielni do
przekładników prądowych od strony szyn a druga zakłóceń zwarciowych
występujących w pozostałych częściach pól.
W przypadku zwarcia na szynach i w polach do przekładników prądowych
podstawowe znaczenie ma zabezpieczenie różnicowe szyn, które działa
bezzwłocznie. W przypadku, gdy rozdzielnia nie jest wyposażona w tego typu
zabezpieczenie, zwarcie wykrywane jest przez zabezpieczenia w sąsiednich
rozdzielniach oraz w polu łącznika szyn rozdzielni, w której wystąpiło zakłócenie.
Podczas zwarcia w polu za przekładnikiem prądowym, od strony linii algorytm
jest taki jak dla zwarć w linii [3].
84
Ryszard Frąckowiak, Piotr Piechocki
Rys. 3. Algorytm działania zabezpieczeń w przypadku zwarć występujących w rozdzielni
Po określeniu wszystkich możliwych par zabezpieczenie-wyłącznik
sprawdzana jest awaryjność urządzeń oraz ewentualne działanie układu LRW.
Najmniejsza suma czasów działania sprawnych par zabezpieczenie-wyłącznik jest
przyjmowana jako czas trwania zakłócenia.
Wartości czasu trwania zwarcia podczas zakłóceń w rozdzielniach …
85
2.4. Przykładowe wyniki obliczeń
Przykładową analizę czasu trwania zwarcia przeprowadzono dla rozdzielni
220 kV, której schemat pokazano na rys. 4 (widok okna programu
komputerowego) z 16 polami oraz 2 systemami szyn. Na schemacie pomiędzy
polami nr 15 i 16 na drugim systemie szyn zaznaczono punkt obserwacji czasu
przepływu prądu zwarciowego.
Rys. 4. Schemat badanej rozdzielni 220 kV – punkt obserwacji zaznaczono kwadratem na 2 systemie
szyn pomiędzy polami nr 15 i 16
W obliczeniach przyjęto, że współczynnik zawodności wszystkich
zabezpieczeń oraz wyłączników jest równy 0,03. Czas trwania zwarcia jest liczony
do momentu, gdy wartość prądu zwarciowego spadnie poniżej 2/3 wartości
maksymalnej. W badaniach prowadzonych dla potrzeb oceny skutków
dynamicznych, uznano, że prąd o takiej wartości nie stanowi istotnego zagrożenia.
Z reguły otwarcie wyłącznika w polu łącznika szyn spełnia ten warunek.
Podobnie w przypadku wyłączania zwarcia przez wyłączniki na drugich końcach
linii dołączonych do badanej rozdzielni przyjęto, że spadek prądu zwarciowego o
1/3 wartości maksymalnej wyznacza czas trwania zwarcia. W tabeli 1
przedstawiono wartości czasu trwania zwarcia dla wybranych poziomów ryzyka
Ra (spodziewanej rocznej częstości przekroczeń tych wartości) dla różnych
konfiguracji EAZ podczas zwarć występujących na szynach rozdzielni. Przez znak
(+) oznaczono, że dany element EAZ występuje, znak (-) oznacza jego brak.
W przypadku zwarć na szynach rozdzielni najszybciej działa zabezpieczenie
różnicowe szyn zbiorczych, działające bezzwłocznie. W konfiguracjach od 1 do 8
czasy trwania zwarcia są podobne i na poziomie ryzyka 10-2 i 10-3 są
zdecydowanie krótsze niż w konfiguracji 9 (bez ZSZ), dla której przekraczają
wartość 450 ms. Gdy w rozdzielni nie występuje zabezpieczenie szyn zbiorczych,
na czas trwania zwarcia składa się czas działania zabezpieczenia w polu sprzęgła
(ok. 350 ms) i czas działania wyłącznika (ok. 100 ms) lub czas zadziałania
zabezpieczeń w sąsiednich rozdzielniach, w II strefie czasowej i czas działania
86
Ryszard Frąckowiak, Piotr Piechocki
wyłączników z nimi współpracujących. Nieco mniejsze wartości czasów Tk dla
konfiguracji 1-4 niż 5-8, dla poziomu ryzyka 10-4 1/a i mniejszej, wynikają z faktu
występowania zabezpieczenia w polu łącznika szyn w konfiguracjach 1-4.
ZSZ(+), SP(+),
LRW(+),
uwb(+), SPZ(+)
ZSZ(+), SP(+),
LRW(-), uwb(+),
SPZ(+)
ZSZ(+), SP(+),
LRW(+), uwb(-),
SPZ(-)
ZSZ(+), SP(+),
LRW(-), uwb(-),
SPZ(-)
ZSZ(+), SP(-),
LRW(+),
uwb(+), SPZ(+)
ZSZ(+), SP(-),
LRW(-), uwb(+),
SPZ(+)
ZSZ(+), SP(-),
LRW(+), uwb(-),
SPZ(-)
ZSZ(+), SP(-),
LRW(-), uwb(-),
SPZ(-)
ZSZ(-), SP(+),
LRW(-), uwb(-),
SPZ(-)
Konfiguracja
Tabela 1. Czasy trwania zwarcia w przypadku zwarć na szynach rozdzielni w zależności
od wyposażenia rozdzielni w układy EAZ
1
2
76,8
100,5
531,7
547,6
585,0
76,8
101,3
532,1
548,1
586,0
Ra [1/a]
10-1
10-2
10-3
10-4
10-5
10-6
3
4
5
6
Tk [ms]
miejsce zwarcia - system szyn
76,8
76,8
76,4
76,8
100,9 100,9 100,5 100,9
532,5 532,5 544,8 544,8
548,9 548,9 554,6 554,6
589,0 593,0 595,0 592,0
7
8
9
76,8
100,5
546,0
555,8
596,0
76,8
100,5
546,0
556,2
595,0
453,9
542,7
553,8
561,6
595,0
Wartości czasu trwania zwarcia w polu rozdzielni dla wybranych poziomów
ryzyka przedstawiono w tabeli 2. W przypadku zwarć w polu od strony szyn
zbiorczych do przekładników prądowych włącznie obowiązuje algorytm działania
zabezpieczeń taki, jak dla zwarć występujących na systemie szyn zbiorczych.
Zwarcia występujące w polu za przekładnikami prądowymi są traktowane tak jak
zwarcia na linii, zabezpieczenie szyn zbiorczych nie chroni przed tymi zwarciami.
Dla ryzyka 10-4 1/a zauważa się wpływ zabezpieczenia w polu sprzęgła. Dla
ryzyka 10-3 1/a brak automatyki SPZ oraz uwspółbieżniania zabezpieczeń
(konfiguracje 3, 4 oraz 7, 8) zwiększa czas trwania zwarcia więcej niż o 280 ms
(dotyczy zwarć między przekładnikiem prądowym a linią). Brak ZSZ oraz SPZ
powoduje wzrost wartości czasu trwania zwarcia już dla ryzyka 10-2 1/a.
Wartości czasu trwania zwarcia na szynach i w polu rozdzielni łącznie, dla
wybranych poziomów ryzyka, przedstawiono w tabeli 3.
W przypadku zwarć na szynach i w polu rozdzielni istotny wpływ na
wyznaczane wartości czasu trwania zwarcia ma zabezpieczenie różnicowe szyn
zbiorczych (konfiguracje 1-8, dla ryzyka 10-2 1/a). Dla ryzyka 10-3 1/a widoczny
jest wpływ automatyki SPZ i zabezpieczenia w polu sprzęgła (konfiguracje 1 i 2)
oraz pewien wpływ LRW (porównanie konfiguracji 5 i 6).
Wartości czasu trwania zwarcia podczas zakłóceń w rozdzielniach …
87
ZSZ(+), SP(+),
LRW(+), uwb(+),
SPZ(+)
ZSZ(+), SP(+),
LRW(-), uwb(+),
SPZ(+)
ZSZ(+), SP(+),
LRW(+), uwb(-),
SPZ(-)
ZSZ(+), SP(+),
LRW(-), uwb(-),
SPZ(-)
ZSZ(+), SP(-),
LRW(+), uwb(+),
SPZ(+)
ZSZ(+), SP(-),
LRW(-), uwb(+),
SPZ(+)
ZSZ(+), SP(-),
LRW(+), uwb(-),
SPZ(-)
ZSZ(+), SP(-),
LRW(-), uwb(-),
SPZ(-)
ZSZ(-), SP(+),
LRW(-), uwb(-),
SPZ(-)
Konfiguracja
Tabela 2. Czasy trwania zwarcia w przypadku zwarć w polu linii L206 w zależności
od wyposażenia rozdzielni w układy EAZ
1
Ra [1/a]
10-1
10-2
10-3
10-4
10-5
10-6
97,0
116,4
448,6
535,4
581,0
2
3
4
5
6
Tk [ms]
miejsce zwarcia - aparatura w polu
97,0 104,9 104,9 97,0
97,0
116,3 399,3 398,9 116,3 116,3
452,4 455,4 497,2 539,4 540,7
537,0 536,2 546,4 551,3 552,6
582,0 583,0 590,0 593,0 595,0
7
8
9
104,9
438,6
540,7
552,6
595,0
104,9
528,0
549,3
560,0
602,0
404,9
500,6
545,2
555,9
591,0
ZSZ(+), SP(+),
LRW(+),
uwb(+), SPZ(+)
ZSZ(+), SP(+),
LRW(-), uwb(+),
SPZ(+)
ZSZ(+), SP(+),
LRW(+), uwb(-),
SPZ(-)
ZSZ(+), SP(+),
LRW(-), uwb(-),
SPZ(-)
ZSZ(+), SP(-),
LRW(+),
uwb(+), SPZ(+)
ZSZ(+), SP(-),
LRW(-), uwb(+),
SPZ(+)
ZSZ(+), SP(-),
LRW(+), uwb(-),
SPZ(-)
ZSZ(+), SP(-),
LRW(-), uwb(-),
SPZ(-)
ZSZ(-), SP(+),
LRW(-), uwb(-),
SPZ(-)
Konfiguracja
Tabela 3. Czasy trwania zwarcia w przypadku zwarć na szynach rozdzielni i w polu linii
L206 w zależności od wyposażenia rozdzielni w układy EAZ
1
Ra [1/a]
10-1
10-2
10-3
10-4
10-5
10-6
2
3
4
5
6
7
Tk [ms]
miejsce zwarcia - system szyn i aparatura w polu
100,4 100,4 110,2 110,3 100,4 100,4 110,3
370,9 372,4 431,4 432,2 437,9 520,2 516,5
531,7 532,1 532,5 537,0 544,8 545,6 546,0
547,8 548,4 549,4 552,2 555,1 555,5 556,3
590,0 590,0 591,0 598,0 598,0 599,0 599,0
8
9
110,2
536,2
552,1
561,6
604,0
455,5
542,8
554,2
562,0
597,0
5. WNIOSKI
Przeprowadzone przykładowe badania symulacyjne potwierdzają przydatność
opracowanego modelu do probabilistycznej oceny wartości czasu trwania zwarcia
podczas zakłóceń występujących w rozdzielni, z uwzględnieniem różnej
konfiguracji EAZ. W ramach dalszych prac przewiduje się wykorzystanie
88
Ryszard Frąckowiak, Piotr Piechocki
opracowanego modelu czasu trwania zwarcia w liniach [3] i na elementach stacji
elektroenergetycznej do oceny skutków dynamicznych przepływu prądu
zwarciowego w rozdzielniach, przy wykorzystaniu podejścia probabilistycznego.
Pozwoli to na opracowanie wskazówek do określania czasu trwania zwarcia
podczas analizy wymienionych wyżej skutków zwarciowych.
LITERATURA
[1]
[2]
[3]
Frąckowiak R. Random type of threat to electrical power devices posed by the short
circuit current flow. Archives of Electrical Engineering, nr 2, 2000 r. pp. 221-242.
IRiESP - Instrukcja Ruchu i Eksploatacji Sieci Przesyłowej – Warunki korzystania,
prowadzenia ruchu, eksploatacji i planowania rozwoju sieci przesyłowej: dostępna
na stronie http://www.pse-operator.pl.
Frąckowiak R., Piechocki P.: Wartości czasu trwania zwarcia w sieci
elektroenergetycznej najwyższych napięć w świetle badań symulacyjnych,
Academic Journals Electrical Engineering, Poznan University of Technology,
nr 70, 2012, s. 75-82.
SHORT-CIRCUIT DURATION VALUES UNDER DISTURBATION
CONDITIONS IN EXTREME HIGH VOLTAGE DISTRIBUTION SUBSTATIONS
- SIMULATION-BASED RESEARCH
Presented question is the continuation of investigations concerning the short-circuit
duration’s estimation in the short-circuit effect calculations using the probabilistic method.
In the paper, the developed simulation model of the short circuit duration under the shortcircuit conditions in the distribution substation is presented. The model development was
based on the analysis of operation of the automatic power protections EAZ and circuitbreakers in the EHV substations during short- circuits. The results of simulation
investigations aiming to estimate the frequency of occurrence of the defined short-circuit
duration are reported. The calculations have been carried out for different configurations
of the EAZ system.
POZNAN UNIVERSITY OF TECHNOLOGY ACADEMIC JOURNALS
No 78
Electrical Engineering
2014
Ryszard NAWROWSKI*
Zbigniew STEIN*
Maria ZIELIŃSKA*
ANALIZA WARTOŚCI NAPIĘĆ WYJŚCIOWYCH
TRANSFORMATORÓW SN/nn W ZALEŻNOŚCI
OD CHARAKTERU I WARTOŚCI OBCIĄŻENIA
W referacie przedstawiono, przy wykorzystaniu programu Mathcad, wyniki obliczeń
wartości napięć wyjściowych transformatorów energetycznych SN/nn przy różnych
wymuszeniach obciążenia, zwłaszcza przy różnych wartościach współczynnika mocy.
Pokazano wpływ niesymetrii obciążenia na wartości napięć.
SŁOWA KLUCZOWE: transformatory, współczynnik niesymetrii napięć, zmienność
napięć, obciążenie niesymetryczne
1. WPROWADZENIE
Transformatory energetyczne nazywane rozdzielczymi, wykorzystywane do
transformacji napięcia średniego na napięcie niskie, pracują bez regulacji napięcia.
Transformatory te mają z reguły trzy zaczepy nastawiane w stanie
beznapięciowym. Transformatory te są eksploatowane w różnych sytuacjach
obciążenia, to znaczy obciążane odbiornikami o różnym charakterze i przy
częstych zmianach impedancji obciążenia. W sieciach niskiego napięcia, z reguły
czteroprzewodowych, czyli z przewodem neutralnym, często występują obciążenia
niesymetryczne jednofazowe. W sieciach przemysłowych występują także
niesymetryczne obciążenia dwufazowe. Transformatory rozdzielcze są
przystosowane do obciążeń niesymetrycznych jednofazowych przez stosowanie
układów połączeń nie wrażliwych na tego typu obciążenia. Wartości napięć
wyjściowych (wtórnych) zależą od wartości napięć wejściowych (pierwotnych)
oraz od spadków napięcia. Spadki napięć zależą od natężenia prądu obciążenia
oraz wartości współczynnika mocy. Podczas obciążeń symetrycznych wartość
spadku napięcia można obliczać przy pomocy prostej zależności (1):
ΔU (I, α) = I(R cos(α) + X sin(α))
(1)
Podczas obliczeń funkcji np. cos i sin przy wykorzystaniu programu Mathcad
konieczne jest posługiwanie się funkcją pomocniczą kąta alfa, czyli zamiast pisać
cosϕ piszemy cos(2α⋅π/3).
__________________________________________
* Politechnika Poznańska.
90
Ryszard Nawrowski, Zbigniew Stein, Maria Zielińska
Na rysunku 1 przedstawiono spadek napięcia w funkcji kąta dla wybranego
przykładu, dla którego I = 5A, R = 2 Ω oraz XL = 5 Ω.
Rys. 1. Wpływ kąta na spadek napięcia
Na rysunku można łatwo zauważyć znaczący wpływ kąta obciążenia wartość
spadku napięcia.
Dla podobnego przykładu, na rys. 2, pokazano wpływ kąta obciążenia na
wartość napięcia wyjściowego. Jako napięcie wejściowe przyjęto znamionowe
napięcie wtórne transformatora 231 V. Napięcie wyjściowe Uwyj = Uwe - ΔU.
U wyj (α) = 231 − (R cos(α) + X sin(α))
Rys. 2. Wpływ kąta na napięcie wyjściowe
Analiza wartości napięć wyjściowych podczas obciążeń niesymetrycznych jest
bardziej złożona. Do analizy zagadnienia jest dogodnie posługiwać się metodą
składowych symetrycznych przy wykorzystaniu programu obliczeniowego Mathcad.
Analiza wartości napięć wyjściowych transformatorów SN/nn w zależności ...
91
240
⎛
⎝
π⎞
⎛
⎝
π⎞
Uwe−ΔU⎜ I , 0.15⋅ 2⋅
Uwe−ΔU⎜ I , 0.5⋅ .2⋅
⎟
4 ⎠ 160
⎟
4⎠
80
0
0
5
10
15
20
I
Rys. 3. Wpływ natężenia prądu na napięcie wyjściowe, przy dwóch różnych wartościach
kąta obciążenia
Przy wykorzystaniu tej metody można obliczać też współczynniki niesymetrii
napięć wyjściowych transformatorów, jako stosunek składowej symetrycznej
kolejności przeciwnej napięcia do składowej zgodnej, lub składowej kolejności
zerowej do składowej kolejności zgodnej. Wartości tych współczynników należą do
charakterystycznych parametrów jakości napięcia sieci. Jest bardzo ważne, by
podczas eksploatacji silników trójfazowych ciągle sprawdzać wartość stosunku
składowej symetrycznej kolejności przeciwnej napięcia do składowej zgodnej.
Przekraczanie dopuszczalnej wartości tego wskaźnika, nie większego niż 0.2, może
powodować przegrzewanie silników trójfazowych.
2. WZORY WYJŚCIOWE DO ANALIZY ZAGADNIENIA
Dla analizy zagadnienia trzeba przyjąć założenia wstępne. Najdogodniej jest
przyjąć wartości impedancji obciążenia poszczególnych faz. Impedancje te można
zapisać w postaci (2):
2π
(2)
Z odb u , v, w = k 1, 2,3 Z odn exp j0.107 ⋅
3
gdzie literami u, v, w oznaczono kolejne fazy.
Na podstawie impedancji poszczególnych faz oblicza się impedancje
składowych symetrycznych kolejności:
zgodnej
przeciwnej
oraz zerowej
( Z u (k 1 ) + aZ v (k 2 ) + a 2 Z w (k 3 ))
3
( Z u (k 1 ) + a 2 Z v (k 2 ) + aZ w (k 3 ))
Z 2 (k 1 , k 2 , k 3 ) =
3
Z1 ( k 1 , k 2 , k 3 ) =
Z 0 (k 1 , k 2 , k 3 ) =
( Z u ( k 1 ) + Z v ( k 2 ) + Z w ( k 3 ))
3
(3)
(4)
(5)
Ryszard Nawrowski, Zbigniew Stein, Maria Zielińska
92
Impedancje w zapisie macierzowym przyjmują postać (6):
⎛ Z1 ⎞ ⎛ 1
⎜ ⎟ ⎜ 2
⎜ Z2 ⎟ = ⎜a
⎜Z ⎟ ⎜ a
⎝ 0⎠ ⎝
1
a
a2
1⎞ ⎛ Z u
⎟ 1⎜
1⎟ ⋅ ⎜ Z v
3
1 ⎟⎠ ⎜⎝ Z w
⎞
⎟
⎟
⎟
⎠
(6)
Po rozłożeniu napięć zasilających oraz prądów i impedancji odbiornika na
składowe symetryczne oraz po przekształceniu równań typu U = IZ na równania
odwrotne typu I = YU otrzymuje się równania prądów składowych symetrycznych
w postaci (7):
⎛ I 1 ⎞ ⎛ M 11
⎜ ⎟ ⎜
⎜ I 2 ⎟ = ⎜ M 21
⎜I ⎟ ⎜M
⎝ 0 ⎠ ⎝ 01
M 12
M 22
M 02
M 10 ⎞
⎛U ⎞
⎟ 1 ⎜ 1⎟
M 20 ⎟ ⋅ ⎜ U 2 ⎟
D⎜
⎟
M 00 ⎟⎠
⎝U0 ⎠
(7)
gdzie:
D1 (k 1 , k 2 , k 3 ) = (Z 0 (k 1 , k 2 , k 3 ) + Z z )(Z 0 (k 1 , k 2 , k 3 ) + Z z )(Z 0 (k 1 , k 2 , k 3 ) + Z μ 0 )
D2 (k1 , k 2 , k 3 ) = −Z1 (k1 , k 2 , k 3 )Z2 (k1 , k 2 , k 3 )[3Z0 (k1 , k 2 , k 3 ) + (Zz + Zz + Zμ0 )]
D3 (k1 , k 2 , k 3 ) = Z1 (k1 , k 2 , k 3 ) 3 + Z 2 (k1 , k 2 , k 3 ) 3
D( k 1 , k 2 , k 3 ) = D 1 ( k 1 , k 2 , k 3 ) + D 2 ( k 1 , k 2 , k 3 ) + D 3 ( k 1 , k 2 , k 3 )
M11(k1 , k2 , k3 ) = (Zz + Z0 (k1 , k2 , k3 ))(Z0 (k1 , k2 , k3 ) + Zμ0 ) − Z1 (k1 , k2 , k3 )Z2 (k1 , k2 , k3 )
M12 (k1 , k 2 , k 3 ) = Z1 (k1 , k 2 , k 3 ) 2 − Z2 (k1 , k 2 , k 3 )(Zμ0 + Z0 (k1 , k 2 , k 3 ))
M10 (k1 , k 2 , k 3 ) = Z 2 (k1 , k 2 , k 3 ) 2 − Z1 (k1 , k 2 , k 3 )(Z0 (k1 , k 2 , k 3 ) + Zz )
M 20 (k1 , k 2 , k 3 ) = Z1 (k1 , k 2 , k 3 ) 2 − Z 2 (k1 , k 2 , k 3 )(Z0 (k1 , k 2 , k 3 ) + Z z )
M 21 (k1 , k 2 , k 3 ) = (Z 2 (k1 , k 2 , k 3 )) 2 − (Z1 (k1 , k 2 , k 3 ))(Z0 (k1 , k 2 , k 3 ) + Zμ0 )
M01 (k1 , k 2 , k 3 ) = Z1 (k1 , k 2 , k 3 ) 2 − Z2 (k1 , k 2 , k 3 )(Z0 (k1 , k 2 , k 3 ) + Zz )
M 02 (k1 , k 2 , k 3 ) = Z 2 (k1 , k 2 , k 3 ) 2 − Z1 (k1 , k 2 , k 3 )(Z0 (k1 , k 2 , k 3 ) + Z z )
M 00 (k1 , k 2 , k 3 ) = (Z z + Z0 (k1 , k 2 , k 3 )) 2 − Z1 (k1 , k 2 , k 3 )Z 2 (k1 , k 2 , k 3 )
M 22 ( k 1 , k 2 , k 3 ) = ( Z 0 ( k 1 , k 2 , k 3 ) + Z z )( Z 0 ( k 1 , k 2 , k 3 ) + Z μ 0 ) − Z1 ( k 1 , k 2 , k 3 ) Z 2 ( k 1 , k 2 , k 3 )
Jeżeli przyjąć, że w napięciu zasilającym uwzględnia się tylko składową
kolejności zgodnej, to składowe symetryczne prądów strony wtórnej
transformatora opisują wzory:
− składowa prądu kolejności zgodnej:
1
(8)
I1 (k 1 , k 2 , k 3 ) = M 11 (k 1 , k 2 , k 3 ) U ntf
D( k 1 , k 2 , k 3 )
− składowa prądu kolejności przeciwnej:
I 2 (k 1 , k 2 , k 3 ) = M 21 (k 1 , k 2 , k 3 ) U ntf
1
D( k 1 , k 2 , k 3 )
− składowa prądu kolejności zerowej:
I 0 (k 1 , k 2 , k 3 ) = M 01 (k 1 , k 2 , k 3 ) U ntf
Prądy fazowe oblicza się według wzorów:
1
D( k 1 , k 2 , k 3 )
(9)
(10)
Analiza wartości napięć wyjściowych transformatorów SN/nn w zależności ...
⎛ I a (k 1 , k 2 , k 3 ) ⎞ ⎛ 1
⎜
⎟ ⎜ 2
⎜ I b (k 1 , k 2 , k 3 ) ⎟ = ⎜ a
⎜ I (k , k , k ⎟ ⎜ a
⎝ c 1 2 3 ⎠ ⎝
1 1⎞⎛ I1 (k 1 , k 2 , k 3 ) ⎞
⎟⎜
⎟
a 1⎟⎜ I 2 (k 1 , k 2 , k 3 ) ⎟
a 2 1⎟⎠⎜⎝ I 0 (k 1 , k 2 , k 3 ) ⎟⎠
Prąd w przewodzie neutralnym opisuje wzór (12):
I po (k 1 , k 2 , k 3 ) = I a (k 1 , k 2 , k 3 ) + I b (k 1 , k 2 , k 3 ) + I c ( k 1 , k 2 , k 3 )
93
(11)
(12)
Napięcia fazowe opisują związki (13):
U a (k1 , k 2 , k 3 ) = I a (k1 , k 2 , k 3 )Z zu (k1 )
U b (k1 , k 2 , k 3 ) = I b (k1 , k 2 , k 3 )Z zv (k 2 )
(13)
U c (k1 , k 2 , k 3 ) = I c (k1 , k 2 , k 3 )Z zw (k 3 )
Składowe symetryczne napięć strony wtórnej transformatora można obliczać
według wzorów (14):
( U (k , k , k ) + aU b (k 1 , k 2 , k 3 ) + a 2 U c (k 1 , k 2 , k 3 ))
U1 ( k 1 , k 2 , k 3 ) = a 1 2 3
3
U 2 (k 1 , k 2 , k 3 ) =
( U a ( k 1 , k 2 , k 3 ) + a 2 U b ( k 1 , k 2 , k 3 ) + aU c ( k 1 , k 2 , k 3 ))
3
(14)
( U a ( k 1 , k 2 , k 3 ) + U b (k 1 , k 2 , k 3 ) + U c ( k 1 , k 2 , k 3 ))
3
Współczynniki niesymetrii napięć strony wtórnej transformatora opisują
związki (15):
U 2 (k1 , k 2 , k 3 )
K u (k1 , k 2 , k 3 ) =
U1 ( k 1 , k 2 , k 3 )
(15)
U 0 (k1 , k 2 , k 3 )
K u 0 (k1 , k 2 , k 3 ) =
U1 ( k 1 , k 2 , k 3 )
U 0 (k 1 , k 2 , k 3 ) =
3. PRZYKŁAD LICZBOWY
Posługując się parametrami transformatora o mocy 630 kVA i napięciach
15000V/420 - 242,5 V oraz napięciu zwarcia 5.6 % obliczono charakterystyczne
wielkości wyjściowe istotne dla tytułu artykułu. Na rysunkach przedstawiono w
postaci graficznej niektóre wyniki obliczeń. Obliczenia przeprowadzono na
przykładzie niesymetrycznego odbiornika o następujących parametrach:
Z zu (k 1 ) = (k 1 Z odn e
j⋅0.107⋅2
Z zv (k 2 ) = ( Z odn ⋅ 1.2e
π
3
)
j⋅0.307⋅2
π
3
)
Ryszard Nawrowski, Zbigniew Stein, Maria Zielińska
94
j⋅0.207⋅2
π
3
Z zw (k 3 ) = (k 3 ⋅ 0.8Z odn e
)
Dla tego przypadku obciążenia niesymetrycznego, przy różnych wartościach
współczynników k1, k2 oraz k3 współczynniki niesymetriii napięć wynoszą:
K u (1,1,1)1 = 0,073
K u (1,0.85,0.9)1 = 0,067
K u (0.9,1,1)1 = 0,076
Dla przykładowych innych obciążeń uzyskuje się np:
K u (1,1,1)1 = 0,022
K u (0.9,1,1)1 = 0,025
K u (1,0.85,0.9)1 = 0,025
Łatwo zauważyć, że dla rozpatrywanego przypadku obciążenia
współczynniki niesymetrii przekraczają dopuszczalną wartość. Zmienność
wartości współczynnika niesymetrii od wartości k1 można prześledzić na
rysunku 7.
1.05
(
U ta k1 , 1 , 1
)
1.02
U tp
(
U tb k1 , 1 , 1
)
1
U tp
(
U tc k1 , 1 , 1
)
0.97
U tp
0.95
0
0.4
0.8
1.2
1.6
2
k1
Rys. 4. Zmienność napięć fazowych w funkcji współczynnika k1
1.05
(
U ta 1 , 1 , k 3
1.05
(
U ta 1 , k 2 , 1
)
(
U tb 1 , k 2 , 1
(
U tc 1 , k 2 , 1
U tp
(
)
1
U tp
)
(
1
U tp
1.02
U tb 1 , 1 , k 3
1.02
U tp
)
U tp
U tc 1 , 1 , k 3
)
U tp
0.97
0.95
)
0.97
0.95
0
0.4
0.8
1.2
1.6
2
k2
Rys. 5. Zmienność napięć fazowych w funkcji
współczynnika k2
0
0.4
0.8
1.2
1.6
k3
Rys. 6. Zmienność napięć fazowych
w funkcji współczynnika k3
2
Analiza wartości napięć wyjściowych transformatorów SN/nn w zależności ...
95
0.1
(
)
0.08
K u k1 , 1 , 1
(
K u k1 , 0.9 , 1.2
(
K u0 k1 , 1 , 1
)
) 0.06
0.04
0.02
0
0
0.5
1
1.5
2
k1
Rys. 7. Zmienność współczynników niesymetrii napięć w funkcji współczynnika k1
4. WNIOSKI
Na skutek przepływu prądu przez uzwojenia transformatora powstają spadki
napięć. Wartości spadków napięć zależą nie tylko od natężenia prądu ale również
od charakteru obciążenia czyli wartości współczynnika mocy. Przy obciążeniach
pojemnościowych napięcia wyjściowe mogą wzrastać w porównaniu z napięciami
wejściowymi. Przy obciążeniach niesymetrycznych napięcia wyjściowe mają w
poszczególnych fazach różne wartości. Przy zasilaniu silników trójfazowych
należy kontrolować wartość współczynnika niesymetrii i bo przy dużej jego
wartości uzwojenia silnika mogą ulec przegrzaniu.
LITERATURA
[1] Stein Z. Eksploatacja maszyn elektrycznych. Rozdz. 5.6 w Poradniku Inżyniera
Elektryka, WNT, Warszawa 2007.
[2] Stein Z. Zielińska M. Wykorzystanie programu MCAD do badania wykorzystania
mocy znamionowej silników indukcyjnych w warunkach niesymetrii 3-fazowego
układu napięć. Materiały ZKwE, Poznań.2009
ANALYSIS OF OUTPUT VOLTAGE IN MV/LV TRANSFORMERS ACCORDING
TO THE LOAD TYPE AND VALUE
The paper presents the results of calculation of output voltage in MV/LV power
transformers for various loads, with consideration of various power factor values. The
computation was carried out with the use of Mcad software. The effect of load asymmetry
on the voltage values is shown.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Bartosz OLEJNIK*
ALTERNATYWNE METODY POMIARU ŚREDNIEGO
NAPIĘCIA W ELEKTROENERGETYCZNEJ SIECI
ROZDZIELCZEJ
W artykule przedstawiono wybrane, alternatywne metody pomiaru średniego napięcia
w sieci elektroenergetycznej. Rozpatrywane są sposoby możliwe do stosowania tak
w rozdzielni, jak i w głębi sieci. Skupiono się głównie na możliwości zastosowania sposobów
alternatywnych oraz potencjalnego wykorzystania ich do współpracy z elektroenergetyczną
automatyką zabezpieczeniową, gdzie nie zawsze wymagana jest duża dokładność pomiaru.
Omawia się przede wszystkim izolatory z wkładkami reaktancyjnymi i rezystancyjnymi jako
urządzenia wnętrzowe. Przedyskutowano także możliwość pomiaru napięcia i jego składowych
symetrycznych na podstawie analizy pola elektromagnetycznego wokół przewodów linii
napowietrznych. W pracy zaprezentowane zostały wyniki badań urządzeń, które mogą posłużyć
jako źródło sygnału napięciowego w elektroenergetycznej automatyce zabezpieczeniowej.
Przedyskutowano także, w końcowej jej części, wady i zalety konkretnych rozwiązań.
SŁOWA KLUCZOWE: przekładnik napięciowy, sensor pomiarowy, izolator reaktancyjny,
dzielnik pojemnościowy, dzielnik rezystancyjno-pojemnościowy, natężenie pola elektrycznego,
efekt Pockels’a
1. WSTĘP
Wysoka efektywność i duża niezawodność pracy sieci rozdzielczej to obecnie
jedne z głównych zadań stawianych operatorom sieci dystrybucyjnych (OSD).
Istnieje wiele dróg do osiągnięcia zadowalających rezultatów. Jedną z nich są, bez
wątpienia, inwestycje w infrastrukturę sieciową, także w dziedzinie
elektroenergetycznej automatyki zabezpieczeniowej. Ta ostatnia, do sprawnego
funkcjonowania, wymaga, między innymi, dostarczania informacji o aktualnej
wartości napięcia na chronionym elemencie systemu.
Współcześnie w Polsce do pomiaru średniego napięcia w sieci dystrybucyjnej
stosuje się głównie magnetyczne przekładniki napięciowe. Są one przystosowane
do transformowania sygnałów o częstotliwości równej 50 Hz. Ich zastosowanie
w przypadku pomiarów wyższych harmonicznych jest ograniczone. Istnieją też
znaczne utrudnienia przy montażu tego typu urządzeń, których przeznaczeniem
__________________________________________
* Politechnika Poznańska.
98
Bartosz Olejnik
jest w zasadzie praca tylko w rozdzielniach wnętrzowych. Cechują się też dość
wysoką ceną, sporymi gabarytami i masą.
Alternatywą do aktualnie stosowanych przekładników napięciowych mogą być
urządzenia oparte na pomiarze pola elektrycznego wokół przewodów [1, 2],
sensory optyczne bazujące na efekcie Pockels’a [3, 4, 5] czy wreszcie dzielniki
pojemnościowe lub pojemnościowo-rezystancyjne [6, 7], także zabudowane
w izolatorach reaktancyjnych.
2. POMIAR NAPIĘCIA BAZUJĄCY NA ANALIZIE POLA
ELEKTROMAGNETYCZNEGO
Jednym z typów alternatywnych czujników do pomiaru napięcia w sieci
dystrybucyjnej są sensory analizujące pole elektromagnetyczne w najbliższym
otoczeniu przewodu. Budowa tego typu urządzeń jest bardzo prosta – składają się
z dwóch elektrod zatopionych w obudowie z tworzywa, która montowana jest
wprost na przewodzie linii napowietrznej. Dodatkowo bardzo często czujnikowi
pola elektrycznego towarzyszy sensor do pomiaru pola magnetycznego i
wyznaczania wartości prądu w fazie. Budowę przykładowego czujnika do pomiaru
napięcia przedstawia rysunek 1.
Rys. 1. Budowa czujnika pola elektrycznego do pomiaru napięcia w linii dystrybucyjnej [1]
Pomiary z wykorzystaniem tego typu czujników są stosunkowo proste. Istotne
jest napięcie między dwiema elektrodami, które powstaje na skutek zjawiska
indukcji
elektrostatycznej.
Pomiary
bazujące
na
analizie
pola
elektromagnetycznego dają wyniki niezależne od temperatury. Wyższe
harmoniczne nie są tutaj tłumione.
W tego typu czujnikach istnieje jednak dość duży problem, którym jest
zjawisko przesuwania fazy, istotne zwłaszcza przy pomiarach energii oraz detekcji
zwarć doziemnych. Istotne jest ułożenie elektrod, przy czym najkorzystniejsza jest
sytuacja, jeśli znajdują się one osiowo w stosunku do przewodnika [1, 2].
Poza czujnikami nakładanymi na przewód, zarówno prądu jak i napięcia,
istnieje też możliwość skonstruowania sensorów zintegrowanych z izolatorami
Alternatywne metody pomiaru średniego napięcia w elektroenergetycznej sieci …
99
wsporczymi [1]. Rozwiązania takie (rys. 2), pomimo utrudnionego procesu
produkcyjnego (dokładne rozmieszczenie elektrod w żywicy), wydają się być
dobrze przemyślanym. Można się spodziewać, że tak zbudowane urządzenia, po
wejściu do seryjnej produkcji, byłyby drogie.
Rys. 2. Izolator wsporczy ze zintegrowanymi sensorami prądu i napięcia
3. POMIAR NAPIĘCIA Z WYKORZYSTANIEM SENSORÓW
OPTYCZNYCH
W energetyce wysokich napięć współcześnie często wykorzystuje się zjawiska
optyczne do pomiaru prądu i napięcia. Ich wykorzystanie jest możliwe także
w sieci dystrybucyjnej.
Sensory do pomiaru napięć, pracujące w oparciu o efekt Pockels’a, odznaczają
się bardzo dobrą dynamiką, wysoką precyzją oraz szerokim widmem pomiarowym
[3]. Wszystkie te cechy są korzystne w przypadku, gdyby czujnik taki miał
współpracować na przykład z detektorem zwarć doziemnych czy analizatorem
jakości energii. Niestety, stosowana technologia nie pozwala na pomiar napięcia
o częstotliwości niższej od ok. 1,5 Hz, także składowej stałej.
Działanie sensora optycznego do pomiaru napięcia opiera się na wysyłaniu
w światłowód spolaryzowanej wiązki światła. Na jej drodze staje kryształ
wykonany z materiału, którego współczynnik załamania światła jest zależny od
natężenia pola elektrycznego w jego otoczeniu. Skutkiem przejścia strumienia
fotonów przez taki kryształ jest opóźnienie jego fazy. Zjawisko to nazywane jest
efektem Pockels’a. Wyróżnia się jego dwa typy.
Jeśli linie pola elektrycznego są prostopadłe do kierunku propagacji wiązki
świetlnej w krysztale to mówi się o poprzecznym efekcie Pockels’a, na którym
bazuje większość stosowanych obecnie czujników. Rozwiązanie to cechuje się
100
Bartosz Olejnik
tym, że sygnał bezpośrednio na wyjściu z układu pomiarowego ma zbyt dużą
amplitudę do jego bezpośredniej obróbki – konieczne jest stosowanie dzielników
napięcia, co znacznie pogarsza właściwości pomiarowe samego sensora [4].
Opóźnienie fazy w przypadku poprzecznego efektu Pockels’a jest dane
zależnością (1).
2 3
n rlE
(1)
0 0
gdzie: λ0 – długość fali promieniowania świetlnego, n0 – współczynnik załamania
światła w krysztale bez działania pola elektrycznego, r – współczynnik
elektrooptyczny, l – długość kryształu na drodze strumienia światła, E – natężenie
pola elektrycznego [5].
Rys. 3. Niepewności pomiaru amplitudy i kąta dla różnych poziomów napięć
oraz ich długoczasowa stabilność – podłużny efekt Pockels’a [3]
Podłużny efekt Pockels’a występuje wtedy, gdy kierunek propagacji światła
i kierunek pola elektrycznego pokrywają się. Ponieważ stosując tę metodę
aktywność kryształu jest mniejsza, na wyjściu czujnika otrzymuje się mniejszą
wartość napięcia niż w przypadku stosowania efektu poprzecznego. Z tego
względu nie ma konieczności używania dodatkowych dzielników
pojemnościowych, a błędy amplitudy i fazy są niewielkie (rys. 4). Opóźnienie fazy
dane jest w tym przypadku zależnością (2) i zależy, między innymi, od grubości
kryształu d [5].
2 3
n0 rdE
(2)
0
Badania pokazują [3], że zastosowanie podłużnego efektu Pockels’a
w pomiarach średniego napięcia może dać bardzo dobre efekty. Błędy pomiarów,
zarówno amplitudy jak i fazy, są bardzo małe i dodatkowo ich zmienność w czasie
także jest niewielka, co pokazuje rysunek 3.
Alternatywne metody pomiaru średniego napięcia w elektroenergetycznej sieci …
101
4. POMIAR NAPIĘCIA Z WYKORZYSTANIEM IZOLATORÓW
REAKTANCYJNYCH
Obecnie produkowane są izolatory wsporcze tzw. reaktancyjne, tak wnętrzowe
jak i napowietrzne, z wbudowanymi dzielnikami napięcia różnego typu.
Struktura dzielników jest bardzo prosta, są tanie i mają szerokie widmo
częstotliwościowe. Pomimo wysokiej dokładności ich cechą są fluktuacje sygnału
na wyjściu w ujęciu długookresowym, co spowodowane jest wpływem warunków
atmosferycznych – jest to ich główna wada.
Schematyczna i uproszczona budowa dzielnika pojemnościowego
przedstawiona jest na rysunku 4.
Rys. 4. Uproszczony schemat budowy dzielnika pojemnościowego
Dzielnik pojemnościowy zbudowany jest z kondensatora wysokonapięciowego
C1 o pojemności, najczęściej, kilkudziesięciu pikofaradów oraz kondensatora C2,
który ma pojemność zwykle kilkuset pikofaradów. Istotna dla pomiarów jest
dokładność wykonania kondensatora C1. Napięcie wyjściowe z dzielnika Up jest
dane znaną zależnością (3). Oczywiście, ze względu na konstrukcję, dzielniki
oparte tylko na pojemnościach nie przetwarzają napięcia stałego, w tym także
składowej stałej. Mają zatem ograniczone zastosowanie.
C1
Up
U
(3)
C1 C 2
Rozwiązaniem tego problemu są dzielniki rezystancyjno-pojemnościowe,
których schematyczna budowa przedstawiona jest na rysunku 5. Zachowując
zależność (4), w przypadku takiego dzielnika, otrzymuje się niezależną od
częstotliwości wartość przekładni oraz
przesunięcia fazowego sygnału
wyjściowego, przy czym to ostatnie jest bliskie zeru.
(4)
R1 C1 R 2 C 2
Napięcie wyjściowe [6] na zaciskach pomiarowych dzielnika jest opisywane
zależnością (5).
R2
Up
(5)
1 R2 jC 2
R2 R1
1 R1 jC1
102
Bartosz Olejnik
Dzielnik RC jest urządzeniem uniwersalnym, nadaje się do pomiaru napięć
stałych i może zostać zastosowany jako źródło sygnału pomiarowego
w automatyce elektroenergetycznej.
Rys. 5. Uproszczony schemat budowy dzielnika RC
Jest możliwość wykorzystania izolatorów reaktancyjnych jako źródła sygnału
w automatyce elektroenergetycznej, także do celów zabezpieczeniowych. Istnieją
jednak dwie przeszkody, które stoją na drodze do realizacji tego zadania.
Rys. 6. Zmienność pojemności kondensatora w zależności od jego temperatury
Pierwszym z problemów jest zależność sygnału wyjściowego od temperatury.
Zjawisko to jest następstwem zmian pojemności kondensatorów, z których
zbudowany jest dzielnik. Badania [7] wskazują jednoznacznie, że zmiany tego
parametru są znaczące (rys. 6). Wadę tę można kompensować programowo w
miernikach współpracujących z konkretnym typem izolatorów.
Drugim problemem w budowie izolatorów reaktancyjnych jest sama
dokładność ich wykonania. Ponieważ, w większości, produkcja tego typu
urządzeń jest daleka od masowej, istnieją dość duże odchyłki w pomiarach, nawet
w przypadku izolatorów tego samego typu i tego samego producenta. Należy mieć
nadzieję, że urządzenia dużych koncernów (np. [8]), które przeznaczone są
typowo do zastosowań pomiarowych, problemu tego są pozbawione.
Prowadzone przez autora badania pokazują, że izolatory reaktancyjne nawet
o najprostszej konstrukcji mogą być źródłem sygnału pomiarowego do wybranych
celów elektroenergetycznej automatyki zabezpieczeniowej. Z użyciem
odpowiednio skalibrowanego miernika prowadzone były pomiary amplitud na
Alternatywne metody pomiaru średniego napięcia w elektroenergetycznej sieci …
103
zaciskach wyjściowych izolatorów reaktancyjnych różnych typów. Zadawane
napięcie było identyczne co do amplitudy i fazy dla każdego izolatora. Otrzymane,
przykładowe wartości błędów względnych amplitudy przedstawiono na rysunku 7.
Rys. 7. Błąd względny pomiaru napięcia z użyciem izolatorów reaktancyjnych
Istnieje także możliwość wykorzystania izolatorów reaktancyjnych do pomiaru
składowej zerowej napięcia, której wartość w ogólnym przypadku dana jest
zależnością (6).
3U 0 U L1 U L 2 U L3
(6)
gdzie: UL1, UL2, UL3 – napięcia fazowe fazy L1, L2, L3 w postaci zespolonej, U0 –
składowa zerowa napięcia w postaci zespolonej.
Napięcia na zaciskach pomiarowych izolatorów różnią się, co najwyżej,
o ok. 1%, stąd wyznaczana składowa zerowa będzie miała bardzo małą wartość.
5. PODSUMOWANIE
W artykule skupiono się na przeglądzie alternatywnych metod pomiaru
napięcia w sieci dystrybucyjnej.
Głównymi zaletami dzielników pojemnościowych i pojemnościoworezystancyjnych jest ich prosta struktura, niski koszt i stosunkowo duża
dokładność, jednakże wyniki pomiarów w dużej mierze uzależnione są od
warunków środowiskowych i jakości wykonania.
Czujniki optyczne do pomiaru średniego napięcia to urządzenia
z założenia drogie, o wysokiej dokładności i skomplikowanej budowie. Ich
zastosowanie do pomiarów średniego napięcia może być dyskusyjne, zwłaszcza,
że większość urządzeń to jak na razie prototypy.
Do czasu udoskonalenia konstrukcji sensorów opartych na analizie pola
elektromagnetycznego wydaje się, że najbardziej optymalnymi do stosowania
w sieci średniego napięcia będą czujniki bazujące na dzielnikach pojemnościoworezystancyjnych, także te zabudowane w izolatorach wsporczych.
104
Bartosz Olejnik
LITERATURA
[1] Furukawa T., Ashikawa M., Ueda Y., Ohchi M., Resin molded type of voltagecurrent sensor for real-time measurement of power factor in power distribution
system, Industrial Electronics Society, 2001. IECON '01. The 27th Annual
Conference of the IEEE (Volume 2).
[2] Kubo T., Furukawa T., Fukumoto H., Ohchi M., Numerical estimation of
characteristics of voltage-current sensor of resin molded type for 22 kV power
distribution systems, ICROS-SICE International Joint Conference 2009 Materials,
Fukuoka.
[3] Parker D., Harlev Y., Presotto D., Optical MV current&voltage sensors as a new
generation instrument transformer for distribution automation, Innovative Smart Grid
Technologies (ISGT), 2012 IEEE PES, Washington DC.
[4] Xiaoguo C., An C., Chuming Y., Senjin Y., Research on the characteristics of voltage
sensor which based on contact less induction technology, China International
Conference on Electricity Distribution 2008, Guangzhou.
[5] Long F., Zhang J., Xie C., Yuan Z., Application od the Pockels effect to high voltage
measurement, The Eight International Conference on Electronic Measurement and
Instruments ICEMI 2007, Xi’an.
[6] Schmid J., Kunde K., Application of non conventional voltage and currents sensors in
high voltage transmission and distribution systems, Smart measurements for future
grids (SMFG), 2011 IEEE International Conference, Bologna.
[7] Nowakowski A., Wlazło P., Badanie wpływu temperatury na parametry przekładnika
reaktancyjnego współpracującego z platformą pomiarową do pomiaru mocy
w sieciach średnich napięć, Elektronika – konstrukcje, technologie, zastosowania, nr
7/2009.
[8] DistribuSense current and voltage sensors – VLS-110 15 kV voltage line post sensor
– bulletin ABB, 2013.
ALTERNATIVE METHODS OF MV MEASUREMENT
IN DISTRUBUTION GRID
The article presents selected, alternative method of MV measurement in distribution
grid. Considered methods are possible for use as a substation, as well as the depth of the
network. The focus is mainly on the possibility of using alternative methods and potential
use them to cooperate with the power system protection, which does not always require
high accuracy. It discusses primarily reactance insulators resistive as indoor unit. Is also
discussed the possibility of voltage and its symmetrical components measurement based on
the analysis of the electromagnetic field around the conductors of overhead lines. The
paper presents the results of equipment tests, which can serve as a source of voltage signal
in power automation and protection devices. Discussed are also the advantages and
disadvantages of specific solutions.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Ryszard NAWROWSKI*
Zbigniew STEIN*
Maria ZIELIŃSKA*
ANALIZA WPŁYWU HARMONICZNYCH W NAPIĘCIU
NA STRATY MOCY W LINII NN ZASILAJĄCEJ SILNIK
INDUKCYJNY Z KOMPENSACJĄ MOCY BIERNEJ PRZY
ZASTOSOWANIU KONDENSATORÓW
W referacie przedstawiono przy wykorzystaniu programu Mathcad, wyniki obliczeń i
analizę wartości strat mocy w odcinku linii elektroenergetycznej niskiego napięcia
zasilającej silnik indukcyjny większej mocy, którego moc bierną kompensuje się przy
zastosowaniu kondensatorów. W sieci z kondensatorami konieczne jest uwzględnianie
harmonicznych występujących w napięciu. Prądy wymuszone tymi harmonicznymi
zwiększają straty mocy. Przedmiotem referatu jest analiza wartości tych strat. Analizę
przeprowadzono dla trzech klas sieci elektroenergetycznej, w zależności od
dopuszczalnych wartości THD.
SŁOWA KLUCZOWE: straty mocy, linia elektroenergetyczna, harmoniczne, wskaźnik THD
1. WPROWADZENIE
Straty mocy w linii elektroenergetycznej, również tej zasilającej silniki
indukcyjne, zależą od rezystancji przewodu oraz kwadratu prądu, czyli ΔP = RI2..
Silniki indukcyjne pobierają z sieci nie tylko moc czynną P, ale również moc
bierną Q, często nazywaną mocą bierną magnesującą. Wartość mocy biernej
(indukcyjnej) silnika zależy nie tylko od jego charakterystycznych parametrów, ale
również od obciążenia, czyli prędkości obrotowej. Zarówno wartości mocy czynnej
jak biernej decydują o wartości takiego charakterystycznego parametru maszyny
jak współczynnik mocy (cosφ).
Ze względu na ograniczanie strat mocy przy przesyłaniu energii elektrycznej
wartość współczynnika mocy powinna być jak największa, a conajmniej taka by
wartość tangensa tego kąta nie była większa niż 0.4. Taką wartość tangensa kąta
określają przepisy. Takiej wartości tangensa kąta odpowiada wartość
współczynnika mocy większa niż 0,928. Ponieważ naturalna wartość
__________________________________________
* Politechnika Poznańska.
106
Ryszard Nawrowski, Zbigniew Stein, Maria Zielińska
współczynnika mocy silników indukcyjnych jest mniejsza od sugerowanej przez
przepisy, dla ograniczenia wartości mocy biernej pobieranej z sieci stosuje się tzw.
kompensację mocy biernej indukcyjnej mocą pojemnościową. Zwykle moc bierną
pojemnościową uzyskuje się z kondensatorów. Kondensatory są wygodnym
elementem układu elektroenergetycznego jako źródła mocy biernej. Wadą
kondensatora jest zależność jego reaktancji (X/f) od częstotliwości. Wada ta jest
istotna wtedy, gdy w napięciu sieci trzeba uwzględniać tzw. wyższe harmoniczne.
Obecnie uwzględnianie harmonicznych w napięciu jest niezbędne praktycznie
zawsze, przy czym w zależności od dopuszczalnej zawartości harmonicznych w
napięciu wyróżnia się klasy (pierwszą, drugą i trzecią). Dla klasy pierwszej
dopuszcza się mniejszą zawartość harmonicznych, dla klasy drugiej wartość
większą a dla klasy trzeciej największą. Dopuszczalną zawartość harmonicznych
określa się na podstawie tzw. wskaźnika THD oraz dopuszczalnych wartości
poszczególnych harmonicznych w napięciu. Żadna z tych wartości nie może być
przekroczona. Wg obowiązujących przepisów harmoniczne w napięciu powinno
się uwzględniać do rzędu 40, jednak w odniesieniu do kondensatorów można się
ograniczyć np. do uwzględniania harmonicznych rzędu 17. W niektórych
przypadkach można brać pod uwagę tylko harmoniczne 5 i 7, których wartości w
napięciu sieci są największe. Wartości wskaźnika THD dla poszczególnych klas
wynoszą: dla klasy pierwszej 5%, dla klasy drugiej 8% natomiast dla klasy trzeciej
10%. Wskaźnik THD oblicza się jako pierwiastek z sumy kwadratów
dopuszczalnych wartości poszczególnych harmonicznych. Dopuszczalne wartości
poszczególnych harmonicznych w napięciu zestawiono w tabeli 1.
Tabela 1. Dopuszczalne wartości harmonicznych w napięciu dla klas 1, 2, 3
Rząd harmonicznych
Klasa 1
Wartość napięć(%)
Klasa 2
Wartość napięć(%)
Klasa 3
Wartość napięć(%)
1
3
5
7
9
11
13
15
17
1
3
3
3
1.5
3
3
0.3
2
1
5
6
5
1.5
3.5
3
0.4
2
1
6
8
7
2.5
5
4.5
2
4
2. ZASADY PRZEDSTAWIANIA WYŻSZYCH HARMONICZNYCH
Dla przyjętej wartości mocy czynnej obciążenia P natężenie prądu I
pobieranego z sieci zależy od wartości cosφ. Przy korzystaniu z programu Mathcad
korzystnie jest posługiwać się nie bezpośrednio funkcją cosinusa, ale funkcją
pomocniczą cos α*2π/3, gdzie α może się zmieniać w takim przedziale w jakim
zamierza się zmieniać wartość cosφ.
Analiza wpływu harmonicznych w napięciu na straty mocy w linii NN ...
107
Natężenie prądu opisuje wzór (1), w którym U jest napięciem
międzyprzewodowym. W sieci niskiego napięcia znamionowe napięcie
międzyprzewodowe wynosi 400 V.
P
I()
(1)
2
3U n cos( )
3
20
I( )
15
10
0
0.1
0.2
0.3
0.4
Rys. 1. Wpływ kąta α na natężenie prądu
Na rysunku 1 przedstawiono zależność prądu odbiornika o mocy 10 kW w
funkcji kąta α. Na rysunku wyraźnie widać, jak silnie współczynnik mocy wpływa
na natężenie prądu. Dla α = 0.3, kiedy współczynnik mocy cosφ = 0.81 natężenie
prądu wynosi 20.3 A podczas gdy dla α = 0.1, kiedy cosφ = 0.978, natężenie prądu
maleje do wartości 16.76 A. Ponieważ straty mocy zależą od kwadratu natężenia
prądu łatwo zauważyć, że przy takiej zmianie współczynnika mocy straty mocy
zmieniają się o około 20%. Podobnie dzieje się w przypadku uwzględniana strat
mocy spowodowanych harmonicznymi w prądzie.
Harmoniczne w napięciu w istotny sposób wpływają na natężenie prądu w
obwodach z kondensatorami, jako że im wyższy jest rząd harmonicznej tym
mniejsza jest reaktancja. Dlatego w przepisach przewidziano mniejsze
dopuszczalne wartości napięć dla poszczególnych harmonicznych wyższych
rzędów. Harmoniczne w napięciu, powodujące przepływy prądów wywołanych
tymi harmonicznymi, wywołują nie tylko wzrost prądów w przewodach
zasilających, ale również, a może przede wszystkim, w kondensatorach powodując
ich intensywne nagrzewanie. Dlatego dostępne są kondensatory o zwiększonej
odporności cieplnej, to znaczy o dopuszczalnym prądzie obciążenia np. 1.3 lub
nawet 1.5 prądu znamionowego. Przy większych prądach harmonicznych
niezbędne jest stosowanie specjalnych dławików. Prąd znamionowy kondensatora
określa się dla częstotliwości znamionowej (50 Hz).
Dla obliczenia natężenia prądu występującego w obwodzie, z uwzględnieniem
wybranych harmonicznych w prądach wymuszonych harmonicznymi w napięciu
108
Ryszard Nawrowski, Zbigniew Stein, Maria Zielińska
(pierwszej, trzeciej, piątej, siódmej, dziewiątej, jedenastej, trzynastej oraz
siedemnastej) można posługiwać się wzorem (2):
2
2
2
2
I I12h I 32h I 52h I 72h I 92h I11
(2)
h I13h I15 h I17 h
w którym prądy poszczególnych harmonicznych Ixh oblicza się ze wzorów:
prąd od pierwszej harmonicznej napięcia wynosi:
U
I1h f
X c1
gdzie Uf jest znamionowym napięciem fazowym, natomiast Xc1 jest reaktancją dla
pierwszej harmonicznej napięcia kondensatora o pojemności Ct:
1
X c1
2f n C t
Dla kolejnych harmonicznych napięcia otrzymuje się odpowiednio:
U
I 3h u 3h f
X c3
gdzie u3h jest dopuszczalną wartością trzeciej harmonicznej napięcia według Tabeli 1,
natomiast Xc3 jest reaktancją kondensatora dla trzeciej harmonicznej
1
X c3
23f n C t
Dla piątej harmonicznej napięcia otrzymuje się związek:
U
I 5h u 5 h f
X c5
gdzie u5h jest dopuszczalną wartością piątej harmonicznej napięcia według Tabeli 1,
natomiast Xc5 jest reaktancją kondensatora dla piątej harmonicznej
1
X c5
25f n C t
Siódmą harmoniczną napięcia przedstawia zależność:
U
I7h u 7h f
X c7
gdzie u7h jest dopuszczalną wartością siódmej harmonicznej napięcia , natomiast
Xc7 jest reaktancją kondensatora dla siódmej harmonicznej:
1
X c7
27f n C t
Dla dziewiątej harmonicznej napięcia otrzymuje się wzór:
U
I 9h u 9h f
X c9
Analiza wpływu harmonicznych w napięciu na straty mocy w linii NN ...
109
gdzie u9h jest dopuszczalną wartością dziewiątej harmonicznej napięcia, natomiast
Xc9 jest reaktancją kondensatora dla dziewiątej harmonicznej:
1
X c9
29f n C t
Jedenastą harmoniczną napięcia opisuje związek:
Uf
I11h u11h
X c11
gdzie u11h jest dopuszczalną wartością jedenastej harmonicznej napięcia, natomiast
Xc11 jest reaktancją kondensatora dla jedenastej harmonicznej:
1
X c11
211f n C t
Dla trzynastej harmonicznej napięcia otrzymuje się:
U
I13 u13h f
X13
gdzie u13h jest dopuszczalną wartością trzynastej harmonicznej napięcia, natomiast
Xc13 jest reaktancją kondensatora dla trzynastej harmonicznej:
1
X c13
213f n C t
Dla piętnastej harmonicznej napięcia otrzymuje się wzór:
U
I15 u 15h f
X15
gdzie u15h jest dopuszczalną wartością piętnastej harmonicznej napięcia, natomiast
Xc15 jest reaktancją kondensatora dla piętnastej harmonicznej
1
X c15
215f n C t
Dla siedemnastej harmonicznej napięcia otrzymuje się odpowiednio:
U
I17 u17h f
X17
gdzie u17h jest dopuszczalną wartością siedemnastej harmonicznej napięcia,
natomiast Xc17 jest reaktancją kondensatora dla siedemnastej harmonicznej:
1
X c17
217f n C t
Poniżej zestawiono, dla zilustrowania zjawiska, wartości poszczególnych
reaktancji oraz dopuszczalnych wartości napięć harmonicznych dla klasy trzeciej i
odpowiadające im natężenia prądów poszczególnych harmonicznych;
110
Ryszard Nawrowski, Zbigniew Stein, Maria Zielińska
Xh1 6.464
Xh9 0.718
Xh3 2.155
Xh5 1.293
Xh11 0.588
Xh13 0.497
Xh7 0.923
Xh15 0.431
Xh17 0.38
Ih1 35.725
Ih9 4.466
Ih3 6.43
Ih5 14.29
Ih11 19.649
Ih15 10.717
Ih7 17.505
Ih13 20.899
Ih17 24.293
Harmonicznych trzeciej i dziewiątej prądu nie uwzględnia się w obwodach
trójfazowych bez przewodu neutralnego, w których te harmoniczne nie mogą płynąć.
3. PRZYKŁAD LICZBOWY
Wyniki obliczeń przedstawiono dla silnika indukcyjnego o mocy znamionowej
10 kW. Przy uwzględnieniu sprawności i znamionowego współczynnika mocy
silnik ten pobiera z sieci moc 14.7 kW. Aby skompensować moc bierną pobieraną
przez silnik zastosowano kondensator o pojemności 4924 mF. Dla tej pojemności
moc bierna kompensująca kondensatora wynosi 8.234 kVAr. Znamionowy prąd
baterii kondensatorów Ink = 35.7 A.
Dla tego prądu obliczono prądy zastępcze uwzględniające harmoniczne w
napięciu. Wzięto pod uwagę dopuszczalne wartości harmonicznych w napięciu,
podane w tab. 1, dla klas pierwszej i trzeciej. Prąd zastępczy płynący do
kondensatora dla klasy pierwszej harmonicznych napięcia wynosi 46.02 A.
Stosunek tego prądu do prądu znamionowego kondensatora wynosi 1.288.
Dla klasy trzeciej harmonicznych napięcia obliczony prąd zastępczy wynosi
58.1 A. Stosunek tego prądu do prądu znamionowego kondensatora wynosi 1.626.
4. WNIOSKI
Łatwo zauważyć, że w obwodzie dla klasy 1 harmonicznych w napięciu natężenie
prądu nie przekracza krotności prądu 1.3 dlatego wystarczy zastosowanie kondensatora o
dopuszczalnym prądzie 1.3. W obwodzie klasy 3 natężenie prądu wynosi ponad 1.5 i
dlatego należy zastosować dławiki. Straty mocy w przewodzie zasilającym rozpatrywany
obwód, spowodowane harmonicznymi w napięciu sieci dla klasy pierwszej wzrosły 1.77
krotnie. Straty mocy w przewodzie zasilającym rozpatrywany obwód, spowodowane
harmonicznymi w napięciu sieci dla klasy trzeciej wzrosły 2.22 krotnie.
Analiza wpływu harmonicznych w napięciu na straty mocy w linii NN ...
111
LITERATURA
[1] PN-EN 60034 – 1/2001 Maszyny elektryczne wirujące. Dane znamionowe i
parametry.
[2] Stein Z. Eksploatacja maszyn elektrycznych, WUPP, Poznań, 1991.
[3] Z. Stein, M. Zielińska Zagadnienia kompensacji mocy biernej w sieci niskiego
napięcia zakładu przemysłowego odbiornikami niesymetrycznymi Materiały
Sympozjum ZKWE 2010.
ANALYSIS OF THE EFFECT OF VOLTAGE HARMONIC COMPONENTS
ON THE POWER LOSS IN LV LINE SUPPLYING AN INDUCTION MOTOR
WITH REACTIVE POWER COMPENSATION WITH THE USE
OF CAPACITORS
The paper presents the results of calculation and analysis of power loss arising in a
segment of an LV electric power line supplying a high-power induction motor, the reactive
power of which is compensated with the use of capacitors. The computation was carried out
with the use of Mcad software. In case of a network including capacitors consideration of
the voltage harmonic components is necessary. The currents forced by these harmonics
increase the power loss. The paper is devoted to analysis of the value of these losses. The
analysis has been carried out for three classes of electric power networks, according to
allowable THD values.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Artur ADAMOWICZ*
WYKORZYSTANIE ELEKTRYCZNYCH SCHEMATÓW
ZASTĘPCZYCH PRÓBEK IZOLACJI CELULOZOWOOLEJOWEJ DO SYMULACJI CHARAKTERYSTYK
NAPIĘCIA POWROTNEGO
W artykule przedstawiono możliwość wykorzystania programu PSpice Schematics pod
kątem zastosowania schematów zastępczych próbek izolacji celulozowo-olejowej do
analizy napięcia powrotnego. Opisano również główne przyczyny awarii transformatorów
energetycznych oraz jedną z nowoczesnych metod używanych do diagnostyki
transformatorów, tzn. spektroskopię częstotliwościową dielektryków (FDS).
SŁOWA KLUCZOWE: spektroskopia częstotliwościowa, izolacja celulozowo-olejowa,
transformatory energetyczne, napięcie powrotne
1. WSTĘP
Na całym świecie przedsiębiorstwa energetyczne poszukują rozwiązań nie tylko
niezawodnych i bezpiecznych podczas eksploatacji transformatorów, ale także
przyjaznych
środowisku.
Próby
wykorzystania
nowych
materiałów
elektroizolacyjnych np. papierów syntetycznych do produkcji transformatorów nie
przynoszą oczekiwanego rezultatu. Z tego powodu nadal podstawowym elementem
izolacyjnym jest celuloza-olej mineralny [1]. Od stanu technicznego w jakim znajduje
się izolacja celulozowo-olejowa zależy bezpieczeństwo oraz opłacalność dalszej
eksploatacji transformatorów energetycznych. Na rysunku 1 pokazano wyniki analizy
najczęstszych przyczyn uszkodzeń transformatorów [2], które potwierdzają, że
elementem najczęściej ulegającym uszkodzeniu jest układ izolacyjny.
Wzrost zawilgocenia celulozy oraz starzenie celulozy przyczynia się głównie
do uszkodzenia transformatora. Jedną z metod używanych w diagnostyce izolacji
celulozowo-olejowej jest częstotliwościowa spektroskopia dielektryczna (FDS;
Frequency Dielectric Spectroscopy). Metoda ta polega na pomiarze i analizie
zmian pojemności izolacji (Ciz), współczynnika strat dielektrycznych (tgδ) oraz
zespolonej przenikalności elektrycznej w funkcji częstotliwości napięcia
pomiarowego w zakresie od 10-4 do 103 Hz [3, 4].
__________________________________________
* Politechnika Opolska.
114
Artur Adamowicz
Rys. 1. Główne przyczyny awarii transformatorów
2. PROGRAM PSpice SCHEMATICS
Program PSpices Schematics pozwala przeprowadzić symulację komputerową
badanych układów elektronicznych bez potrzeby stosowania w laboratorium
urządzeń pomiarowych oraz podzespołów laboratoryjnych. Skomplikowane
pomiary i analizy pozwalają wyszukać oraz poprawić ewentualne błędy. Dzięki
zastosowaniu programu PSpices Schematics czas wykonywania symulacji ulega
znacznemu skróceniu, a popełnione błędy podczas projektowania układu
elektrycznego w łatwy sposób można zdiagnozować i poprawić. Przeprowadzając
symulację komputerowe należy pamiętać, że działanie układu symulowanego na
komputerze jest zbliżone do działania układu rzeczywistego. Możliwości PSpice
Schematics pozwalają bardzo dokładnie odzwierciedlić działanie rzeczywistego
układu dzięki zastosowanym w programie modelom elementów, które są bardzo
zbliżone do rzeczywistych odpowiedników [5]. Dodatkowym atutem programu
jest wersja PSpice Student, która jest darmowa i pozwala w warunkach domowych
przeprowadzać symulację.
Po zaprojektowaniu schematu elektrycznego w PSpice Schematics można
zdefiniować parametry poszczególnych elementów oraz źródeł sygnałów
potrzebnych do przeprowadzenia symulacji. Każdemu z elementów można
przypisać odpowiedni symbol, dzięki czemu łatwo zdiagnozować źle dobrany
element lub nie odpowiednio przyłączony. Program PSpiece jest jednym z
najpopularniejszych symulatorów działania układów elektronicznych.
Wykorzystanie elektrycznych schematów zastępczych próbek izolacji …
115
3. UKŁAD POMIAROWY
W laboratoryjnym układzie pomiarowym służącym do diagnostyki próbek izolacji
celulozowo-olejowej metodą FDS wykorzystano miernik LCR HiTESTER 3255-50
firmy Hiok. Miernik ten pozwala na wykonywanie pomiarów w zakresie
częstotliwości od 10-3 Hz do 105 Hz przy stałym napięciu odniesienia. Dokładne
cyfrowe ustawienie częstotliwości oraz stałe napięcie odniesienia pozwoliło na
analizę zmian wartości współczynnika stratności (tgδ), pojemności (Ciz) oraz
zespolonej przenikalności elektrycznej (ε’, ε’’) próbek izolacji celulozowo-olejowej.
Próbki izolacji celulozowo-olejowej były umieszczane w metalowym naczyniu
wykonanym ze stali nierdzewnej wypełnionym olejem izolacyjnym. Do pomiarów
wykorzystano papier elektrotechniczny transformatorowy firmy Tervakoski.
Pojedynczą próbkę stanowiły 2 paski papieru o rozmiarze 140 x 700 mm
nawinięte na elektrodę niskiego potencjału. Celem zróżnicowania próbek pod
względem stopnia zawilgocenia papieru, poddano je wstępnemu suszeniu w
temperaturze 120oC w warunkach próżni. W kolejnym etapie określano masę
początkową badanej próbki oraz śledzono przyrost jej wagi w wyniku migracji
wilgoci z powietrza. Dzięki temu otrzymano próbki o zawilgoceniu od wartości
początkowej poniżej 1%, aż do wartości 4%. Kolejnym etapem był proces
impregnacji próbek olejem, w tym ustalenie równowagi hydrodynamicznej
celuloza-olej oraz wytrącenie ewentualnych pęcherzyków powietrza. Ostatecznie
wszystkie próbki poddawano kilkudniowemu sezonowaniu w oleju w
podwyższonej temperaturze. Badania eksperymentalne zostały natomiast
przeprowadzone w temperaturze od 24oC do 60oC.
Tabela 1 przedstawia dokładne oznaczenie próbek izolacji celulozowoolejowej.
Tabela 1. Cykl przygotowania i oznaczenie próbek izolacji celulozowo-olejowej
116
Artur Adamowicz
4. SCHEMAT ZASTĘPCZY PRÓBEK IZOLACJI
CELULOZOWO-OLEJOWEJ
Zastępczy schemat próbek izolacji celulozowo-olejowej można przedstawić w
oparciu o model Cole-Cole, którego empiryczne równanie można zapisać w
postaci [6]:
0
(1)
( )
1 ( j ) 1
gdzie: ε0 – przenikalność elektryczna, ε∞ – przenikalność elektryczna materiału dla
częstotliwości f = ∞, ω – pulsacja, τ – czas relaksacji, α – współczynnik (0≤ α ≤ 1).
Analiza parametrów Cole-Cole (εs, ε∞, α, τ), w postaci elektrycznego
zastępczego schematu dielektryka przedstawia rysunek 2. Relaksacyjne
właściwości materiału przedstawia się w postaci impedancji Za (2), której wartość
zależy od współczynnika α oraz czasu relaksacji τ.
Rys. 2. Elektryczny schemat zastępczy dielektryka
Wzór na impedancję charakterystyczną Za ma postać:
Z a (s)
(C 0 C )( s )
(2)
Do określenia wartości stałej czasowej τ oraz parametru α wykorzystuje się
charakterystykę Cole-Cole zespolonej przenikalności (ε’-ε”, metoda FDS) [3].
Dokładny sposób wyznaczenia wartości poszczególnych elementów schematu
zastępczego impedancji Za został opisany w artykule [7].
5. SYMULACJA KOMPUTEROWA
Celem przeprowadzenia symulacji komputerowej w programie PSpices
Schematics było określenie stopnia oddziaływania zawilgocenia i temperatury na
parametry schematu zastępczego izolacji celulozowo-olejowej. Analiza została
przeprowadzona wykorzystując metodę napięcia powrotnego [8] dla przykładowo
dobranego czasu ładowania 10 s oraz czasu zwarcia 5s.
Wykorzystanie elektrycznych schematów zastępczych próbek izolacji …
117
Na rysunku 3 przedstawiono zaprojektowany w programie szeregoworównoległy schemat zastępczy izolacji celulozowo-olejowej.
Rys. 3. Zaprojektowany w programie szeregowo-równoległy schemat zastępczy
izolacji celulozowo-olejowej
Rysunek 4 przedstawia przykładowe charakterystyki napięcia powrotnego,
otrzymane na drodze symulacji komputerowej przy wykorzystaniu schematów
zastępczych.
a)
b)
Rys. 4. Przykładowe charakterystyki napięcia powrotnego Up w funkcji temperatury (a)
oraz zawilgocenia (b)
Analizując przedstawione na rysunkach 4a oraz 4b charakterystyki napięcia
powrotnego zauważono przesuwanie się maksimów i czoła poszczególnych
charakterystyk w stronę krótszych czasów w miarę wzrostu temperatury (4a) oraz
maksimów w miarę wzrostu zawilgocenia (4b). Powodem przesuwania się
charakterystyk w miarę wzrostu temperatury jest wzrost przewodności skrośnej
badanej próbki celulozowo-olejowej, natomiast w przypadku wzrostu zawilgocenia
przyczyną jest skracanie się czasów relaksacji.
118
Artur Adamowicz
6. WNIOSKI
Przeprowadzone symulacje komputerowe oraz badania eksperymentalne
potwierdzają możliwość wykorzystania elektrycznych schematów zastępczych próbek
izolacji celulozowo-olejowej do symulacji charakterystyk napięcia powrotnego. Analiza
otrzymanych charakterystyk próbek izolacji celulozowo-olejowej pozwala ocenić stan
izolacji pod kątem wpływu na nią temperatury oraz zawilgocenia. Zdaniem autora,
zaprojektowany na podstawie modelu Cole-Cole szeregowo-równoległy schemat
zastępczy próbki izolacji celulozowo-olejowej można wykorzystać do diagnostyki
transformatorów energetycznych. Oceniając stan izolacji urządzeń energetyki
zawodowej należy również uwzględnić polaryzację ładunku przestrzennego na granicy
faz celuloza-olej, która opisuje mechanizm Maxwella-Wagnera.
LITERATURA
[1] Saha T. K.: Review of modern diagnostic techniques for assessing insulation
condition in aged transformers. IEEE Transactions on Dielectrics and Electrical
Insulation, V.10 No 5, 903-917, October 2003
[2] Szrot M., Płowucha J., Subocz J.: Planowanie eksploatacji transformatorów z
wykorzystaniem systemu TrafoGrade. PAK 2008 nr 11, s. 780-782.
[3] Wolny S.: Diagnostyka stanu izolacji papierowo-olejowej z wykorzystaniem metod
polaryzacyjnych. OW Politechniki Opolskiej, Studia i Monografie, z. 222, Opole, 2008.
[4] Gafvert U., Adeen L., Tapper M., Ghasemi P., Jonsson B.: Dielectric spectroscopy in time
and frequency domain applied to diagnostic of power transformers. 6th International
Conference Properties and Applications of Dielectric Materials, vol. 2, 2000.
[5] Porębski J., Korohoda P.: SPICE program analizy nieliniowej układów
elektronicznych. WNT, 1996r.
[6] S.T. Bishay, Numerical methods for the Calculation of Cole-Cole parameters.
Egyptian Journal of Solids, vol. 23, no. 2, 2000, pp. 179-188.
[7] Wolny S., Adamowicz A.: Analiza oddziaływania stopnia zawilgocenia oraz temperatury
na parametry schematu zastępczego izolacji papierowo-olejowej wyznaczonych w oparciu
o model Cole-Cole , Przegląd Elektrotechniczny, 7, 315-317, (2013).
[8] Wolny S., Zdanowski M.: Analysis of Recovery Voltages Parameters of Paper-Oil
Insulation Obtained from Simulation Investigations Using the Cole-Cole Model. IEEE
Transactions on Dielectrics and Electrical Insulation, Vol. 16, No. 6, 1676-1680,
December 2009.
THE USE OF THE EQUIVALENT CIRCUITS OF THE SAMPLES
OF CELLULOSE-OIL INSULATION FOR THE SIMULATION
OF RETURN VOLTAGE DOMAINS
The article describes one of the methods used for the diagnosis of power transformers
frequency dielectric spectroscopy FDS. With the obtained measurements can determine
model parameters Cola-Cola (εs, ε ∞, α, τ), which will enable the appointment of the
Wykorzystanie elektrycznych schematów zastępczych próbek izolacji …
119
substitute schem elements cellulose insulation oil. Designated RC elements designed the
substitute schema in PSpice Schematics program allows to carry out computer simulation.
The time constants specifying the polarization relaxation mechanisms are simulated as a
combination of RC elements. Relaxation mechanisms occurring in isolation diagnosed
determines the number of serial RC branch connected to the scheme. The analysis of the
characteristics through computer simulations allow recovery voltage assess the impact of
the degree of moisture and temperature insulation cellulose-oil.
The article also presents the possibility of using a PSpice Schematics under an angle
suitability characteristics obtained to analysis the voltage a return.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Marek LEPICH*
ANALIZA CHARAKTERYSTYK CZASOWYCH PRĄDU
DEPOLARYZACJI PRÓBEK IZOLACJI ARAMIDOWOOLEJOWEJ POD KĄTEM OCENY WPŁYWU STOPNIA
ICH ZESTARZENIA
W artykule przedstawiono laboratoryjne wyniki badań próbek izolacji aramidowo-olejowej
z wykorzystaniem metody PDC (Polarization and Depolarization Current). Ponadto
przedstawiona została metodologia sporządzania próbek o zróżnicowanym stopniu ich
degradacji zawierająca proces przyśpieszonego starzenia oraz analiza uzyskanych wyników
pomiarów na podstawie rodzin charakterystyk wyznaczonych w oparciu o pomiary prądu
depolaryzacji. Przedstawiona została także funkcja umożliwiająca aproksymację uzyskanych
na podstawie pomiarów charakterystyk o wysokim współczynniku ich odwzorowania.
SŁOWA KLUCZOWE: transformatory dużych mocy, izolacja, aramid
1. WSTĘP
Obecna sytuacja ekonomiczno-gospodarcza na świecie wymusza na
użytkownikach sieci energetycznych podejmowanie kroków umożliwiających
obniżenie kosztów ich eksploatacji. Jednym ze sposobów umożliwiających
osiągniecie powyższego celu jest konstruowanie urządzeń z trwalszych
materiałów jak i prawidłowe ich eksploatowanie poprzez stałą kontrolę ich
kondycji. Dlatego coraz częściej izolacja stała wykonywana dotychczas z celulozy
zastępowana jest komponentami aramidowymi. Główną przyczyną awarii
transformatorów dużych mocy jest uszkodzenie izolacji spowodowane jej
zestarzeniem. Dlatego kluczową sprawą wydaje się być opracowanie metody
umożliwiającej szacowanie stopnia degradacji izolacji stałej. Jednym ze sposobów
bezinwazyjnego szacowania stanu izolacji jest metoda oparta na analizie prądów
depolaryzacji [1, 2, 7].
2. SPOSÓB WYKONANIA POMIARÓW
Po umieszczeniu rozładowanej izolacji w polu napięcia stałego możemy
zaobserwować powstanie prądu związanego ze zjawiskiem polaryzacji
__________________________________________
* Politechnika Opolska.
122
Marek Lepich
dielektryka. Jego wartość będzie zależna od stałej czasowej wynikającej z
przewodności warstwy izolacyjnej oraz jest związana z aktywacją różnych
procesów polaryzacji/depolaryzacji w danym materiale izolacyjnym. Powstający
w ten sposób prąd nazywa się prądem polaryzacji, którego wartość zanika wraz z
procesem porządkowania dipoli występujących w materiale izolacyjnym, aż do
momentu osiągniecia stanu równowagi. Po usunięciu wymuszenia następuje
proces depolaryzacji polegający na zjawisku relaksacji, który wymusza przepływ
prądu w przeciwnym kierunku. Przebiegi prądów i napięć w metodzie PDC
pokazano na rysunku 1. Wartość prądu ściśle powiązana jest z przewodnością
izolacji, większa przewodność charakteryzuje się wyższymi wartościami
płynącego prądu [2, 3]. Przy założeniu że badana izolacja jest całkowicie
rozładowana, a wartość przyłożonego napięcia jest zgodna jak poniżej:
t0
0
U ( t )Uo 0 x tc
0
t tc
(1)
prąd polaryzacji można zatem wyrazić jako [4]:
i p (t ) c 0 u 0 [
f (t)
r
(2)
Dla izolacji złożonej z więcej niż jednego rodzaju materiału σ, εr oraz f(t)
reprezentują odpowiednio: przewodność kompozytu, przenikalność i funkcję
odpowiedzi dielektrycznej tego niejednorodnego materiału. Podczas odłączenia
napięcia i zwarcia obwodu uzyskujemy prąd depolaryzacji o wartości [4]:
i d (t ) c 0 u 0 [f ( t ) f (t t c )]
gdzie tc jest czasem przyłożenia napięciowego wymuszenia zewnętrznego.
Rys. 1. Przebieg prądów i napięć występujące podczas cyklu pomiarowego PDC
(3)
Analiza charakterystyk czasowych prądu depolaryzacji próbek izolacji …
123
Z pomiarów prądu polaryzacji i depolaryzacji możliwe jest wyznaczenie
stałoprądowej przewodności σ, badanego obiektu. Jeżeli badany obiekt jest pod
wpływem pola stałoprądowego odpowiednio długo, równanie (2) i równanie (3)
mogą być połączone i przewodność stałoprądowa może być wyrażona jako:
0
[i p ( t ) i d ( t )]
c0u 0
(4)
Próbki wykorzystane do badań wykonano z papieru aramidowego Nomex® typu
410 o grubości 50 µm. Do nasycenia próbek wykorzystano świeży mineralny olej
izolacyjny firmy Nynas typu Nytro 10GBN. Papier aramidowy przed impregnacją
został poddany suszeniu oraz przyspieszonemu starzeniu termicznemu i
kontrolowanemu wagowo zawilgacaniu. Przyspieszony proces starzenia uzyskano
poprzez degradację termiczną próbek przed impregnacją olejem w wyniku
wygrzewania ich w komorze w temperaturze 250°C przez odpowiedni, wcześniej
zdefiniowany czas (tabela 1). Uzyskano w ten sposób sześć szeregów termicznie
zdegradowanych próbek począwszy od zerowej degradacji (papier nowy
niezestarzony) po próbki starzone kolejno co pięćdziesiąt godzin, aż do próbek o
najwyższym stopniu zestarzenia (papier starzony przez 250 h). Zróżnicowane
zawilgocenie próbek uzyskano poprzez umieszczenie próbek w próżni z
temperaturze 100°C, a następnie zawilgacaniu ich na skutek pochłaniania wody z
atmosfery. Szacowanie zawilgocenia było prowadzone poprzez kontrolę
zmieniającej się wagi próbek, które magazynując wodę zwiększały swoją wagę.
Przyjęto, że na każdy 1% zwiększonej wagi w badanym materiale występował
jedno procentowy wzrost zawilgocenia. Uzyskano w ten sposób 24 próbki o
zróżnicowanym stopniu zestarzenia i zawilgocenia.
Rys. 2. Poglądowy sposób przygotowania próbki. 1- elektroda wysokiego potencjału, 2- izolacja
aramidowo-olejowa, 3- elektroda niskiego potencjału
Próbki izolacji aramidowej wykonano w formie pasów o wymiarach 135 mm x
700 mm, nawiniętych w formie zwijki na elektrodę niskiego potencjału,
oddzielonych elektrodą wysokiego potencjału (rys. 2). Oznaczenie kolejnych
próbek przyjęto zgodne z Tabelą 1.
Układ pomiarowy oraz zasadę jego działania przedstawiono na rysunku 3. Jako
źródło napięcia stałego wykorzystano miernik dużych rezystancji Megger BM25.
124
Marek Lepich
Tabela 1. Sposób oznaczania próbek izolacji aramidowo-olejowej
ABCD-
IA
IB
IC
ID
IIA
IIB
IIC
IID
IIIA
IIIB
IIIC
IIID
IVA
IVB
IVC
IVD
VA
VB
VC
VD
VIA
VIB
VIC
VID
zawilgocenie początkowe (bezpośrednio po osuszeniu papieru, ok. 0,5%)
zawilgocenie A plus wzrost wagi o 1%
zawilgocenie A plus wzrost wagi o 2%
zawilgocenie A plus wzrost wagi o 3%
I – papier niezestarzony (suszenie 100°C pod próżnią )
II - papier zestarzony w temp. 250°C przez 50 h
III- papier zestarzony w temp. 250°C przez 100 h
IV- papier zestarzony w temp. 250°C przez 150 h
V - papier zestarzony w temp. 250°C przez 200 h
VI- papier zestarzony w temp. 250°C przez 250 h
a)
b)
Rys. 3. Układ pomiarowy, a) zasada działania, b) schemat blokowy
Procedurę pomiaru realizował dedykowany układ mikroprocesora, sterujący
czasem załączania i wyłączenia układu poprzez wysokonapięciowe przekaźniki
kontaktronowe. Tor niskoprądowy składał się z elektrometru Keithley 6517A
połączonego z komputerem dla celów rejestracji i archiwizacji wyników badań. Na
podstawie badań wstępnych, całkowity czas pomiaru ustalono odpowiednio: 600 s
polaryzacja oraz 600 s depolaryzacja. Wyniki pomiarów były archiwizowane z
częstotliwością 5 Hz, natomiast napięcie ładowania Uc wynosiło 50 V.
Analiza charakterystyk czasowych prądu depolaryzacji próbek izolacji …
125
3. WYNIKI BADAŃ
Pomiary prądów depolaryzacji wykonano dla próbek o zróżnicowanym stopniu
zestarzenia i zawilgocenia zgodnie z tabelą 1. Aby zniwelować błędy mogące
powstać w związku ze zmienną temperaturą badanej izolacji, wszystkie testy dla
poszczególnych próbek były realizowane w celce wypełnionej olejem o
stabilizowanej temperaturze. Badania wykonywano w przedziale temperatur od
20˚C do 70˚C, ze zmianą o 10˚C (typowy zakres temperatur występujących w
eksploatowanych transformatorach energetycznych). Zarejestrowane zmiany
wartości prądu depolaryzacji w funkcji temperatury dla wybranej próbki
przedstawiono na rysunku 4. Wzrost temperatury izolacji aramidowo-olejowej
pociąga za sobą wzrost wartości prądu depolaryzacji. Wskazuje to jednocześnie na
silną zależność przewodności oraz czasów relaksacji dipolowych badanej izolacji
aramidowo-olejowej od temperatury, tzn. proporcjonalny spadek rezystywności
oraz czasów relaksacji wraz z rosnącą temperaturą izolacji. Jest to zjawisko typowe
dla dielektryków polarnych.
Rys. 4. Charakterystyki prądów depolaryzacji w funkcji czasu w zależności od temperatury badanej
izolacji dla wybranej próbki CI (Tabela 1.) T1 = 20˚C, T2 = 30˚C, T3 = 40˚C, T4 = 50˚C,
T5 = 60˚C, T6 = 70˚C
Rysunek 5 przedstawia wybrane przebiegi prądów depolaryzacji wyznaczone
dla próbek aramidowo-olejowych różniących się stopniem zestarzenia. Analizując
wpływ zestarzenia próbek zauważyć należy, że dla czasów powyżej 100 s
obserwuje się wydłużanie zaniku prądu depolaryzacji wraz z rosnącym
zestarzeniem, niezależnie od temperatury oraz stopnia zawilgocenia próbek.
Zjawisko to zachodzi odwrotne niż w przypadku starzonej izolacji celulozowej [5].
Do analizy wykorzystane zostało okno czasowe w przedziale od 100 s do 600 s ze
126
Marek Lepich
względu na zbyt dynamiczne zmiany wartości prądu depolaryzacji w początkowym
czasie pomiaru, a także aby wyeliminować wpływ właściwości samego oleju
izolacyjnego w tym okresie czasu [6].
a)
b)
Rys. 5. Charakterystyki prądów depolaryzacji w funkcji czasu dla zróżnicowanego zestarzenia
i stałego zawilgocenia papieru aramidowego w temperaturze 50 ˚C; a) izolacja aramidowa
o zawilgoceniu 2%, b) izolacja aramidowa o zawilgoceniu 1%
Wartość współczynnika regresji R2 dla poszczególnych charakterystyk: IC – (R2 = 0,998),
IIIC – (R2 = 0,995), VC – (R2 = 0,997), VIC – (R2 = 0,988)
Rys. 6. Charakterystyki prądów depolaryzacji w funkcji czasu dla zróżnicowanego zestarzenia i stałego
zawilgocenia papieru aramidowego w temperaturze 50 ˚C; izolacja aramidowa o zawilgoceniu 2%
wraz z naniesionymi funkcjami aproksymacyjnymi
Analiza charakterystyk czasowych prądu depolaryzacji próbek izolacji …
127
W oparciu o dane literaturowe [5, 7], charakterystyki czasowe prądów
depolaryzacji można aproksymować między innymi przy pomocy funkcji: Deby’a,
Curie-Schweindlera oraz Jonschera. Jednak dla badanego rodzaju izolacji najlepsze
wyniki w odwzorowaniu prądu depolaryzacji uzyskano wykorzystując funkcję
aproksymującą Curie-Schweindlera (wzór (5)), co zostało przedstawione na
rysunku 6.
ƒc(t) = B• t-N
(5)
gdzie: B, N – współczynniki.
Otrzymane wartości współczynnika regresji R2 dla charakterystyk przykładowo
przedstawionych próbek na rysunku 6 wskazują na dobre odwzorowanie
charakterystyk uzyskane na podstawie funkcji Curie-Schweindlera. Zbliżone
wartości R2 uzyskano dla wszystkich próbek izolacji aramidowo-olejowej.
4. PODSUMOWANIE
Przeprowadzone badania wykazały przydatność stosowania metody PDC do
oceny stanu izolacji aramidowo-olejowej. Widoczna tendencja wzrostu wartości
prądu depolaryzacji wraz z postępującym procesem degradacji izolacji aramidowoolejowej, zdaje się pomyślnie rokować w adaptacji metody do celów szacowania
zaawansowania procesów starzeniowych występujących w transformatorach
energetycznych. Po uwzględnieniu wpływu temperatury oraz zawilgocenia badanej
izolacji, możliwym wydaje się zastosowanie tej metody do diagnostyki
transformatorów energetycznych wykorzystujących izolację aramidową, na
podobnej zasadzie jak w przypadku klasycznej izolacji celulozowo-olejowej. Na
podstawie przeprowadzonych dotychczas badań, autor proponuje zastosować w
analizie aproksymacyjnej prądu depolaryzacji funkcję odpowiedzi dielektrycznej
Curie-Schweindlera. Oczywiście wymaga to jeszcze przeprowadzenia szeregu
badań eksperymentalnych, których ostatecznym celem będzie wypracowania
procedury właściwej adaptacji metody PDC do diagnostyki izolacji aramidowoolejowej w transformatorach energetycznych.
LITERATURA
[1] Saha T. K., Review of Modern Diagnostic Techniques for Assessing Insulation
Condition in Aged Transformers, IEEE Trans. on Dielectr. and Electrical Insul., Vol.
10. October 2003, pp. 903-917.
[2] Saha T. K., Optimal Time Selection for the Polarisation and Depolarisation Current
Measurement for Power Transformer Insulation Diagnosis, 2007 IEEE Power
Engineering Society General Meeting, Tampa, Florida, USA, 24-28 June 2007, pp. 1-7.
[3] Fofana I., Hemmatjou H, Farzaneh M., Gockenbach E., Borsi H., Polarization and
Depolarization Current measurements of oil impregnated paper insulation system under
thermal runaway, 10th IEEE International Conference on Solid Dielectrics, Potsdam,
Germany, 4-9 July 2010, pp. 1-4.
128
Marek Lepich
[4] Muhamad N., Phung B., Blackburn T., Lai K. ,Polarization and Depolarization Current
(PDC) tests on biodegradable and mineral transformer oils at different moisture levels,
Power Engineering Conference, AUPEC 2009, Australia, 2009, pp. 1-6.
[5] Wolny S., Kędzia J., The assessment of the influence of temperature of selected
parameters of the approximation method of depolarization current analysis of paper–oil
insulation, Journal of Non-Crystalline Solids, Vol. 356, April 2010, pp. 809–814.
[6] Silva H., Bassi W., Diogo A., Noninvasive ageing assessment by means of polarization
and depolarization currents analysis and its correlation with moisture content for power
transformer life management, Transmission and Distribution Conference and
Exposition: Latin America, 2004 IEEE/PES, 2004, pp. 611-616.
[7] Wolny S., Diagnostyka stanu izolacji papierowo-olejowej z wykorzystaniem metod
polaryzacyjnych, Oficyna Wydawnicza Politechniki Opolskiej, Studia i Monografie, z.
222, Opole, 2008.
A TIME-DOMINE ANALYSIS OF THE AGENING PROCESS IN ARAMID-OIL
INSULATION USING THE PDC METHOD
This article presents results of laboratory tests on samples of aramid-oil insulation using
the method of PDC (Polarization and Depolarization Current). A methodology is described
for preparing the samples with various degrees of degradation, comprising an accelerated
aging process and an analysis of measurements of the depolarization current. Also, an
approximation function is presented that provides an excellent fit to the measured current
characteristics.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Łukasz NAGI*
Piotr SCHNEIDER*
WYKORZYSTANIE ŚRODOWISKA MATLAB
DO TWORZENIA APLIKACJI I SYMULACJI
WSPOMAGAJĄCYCH BADANIA NAD WYŁADOWANIAMI
NIEZUPEŁNYMI
W artykule przedstawiono wyniki jakie otrzymano w efekcie przeprowadzenia
eksperymentu generowania promieniowania jonizującego przy udziale wyładowań
niezupełnych wywoływanych w wadliwej izolacji elektrycznej. Wykonano symulację
wyżej wymienionego zjawiska fizycznego, opierającą się na rejestrowanych danych
pomiarowych. Na potrzeby eksperymentu utworzono również aplikację do automatycznego
pobierania i wstępnego opracowywania danych. Zarówno utworzona symulacja jak i
aplikacja zostały wykonane w środowisku MATLAB. Artykuł przedstawia również krótki
opis dotychczasowych metod badawczych wyładowań niezupełnych oraz sugeruje dalsze
pomysły na rozwijanie eksperymentu.
SŁOWA KLUCZOWE: wyładowania niezupełne, środowisko MATLAB, promieniowanie
rentgenowskie
1. WYŁADOWANIA NIEZUPEŁNE MOŻLIWOŚCI
DIAGNOSTYCZNE
Jednym z bardziej istotnych działów przemysłu elektroenergetycznego jest
diagnostyka urządzeń i linii przesyłowych. Szczególną uwagę zwraca się na
stosowane izolacje oraz ich parametry wytrzymałościowe i ochronne. Jakość izolacji
ma wpływ nie tylko na jej cenę ale i też skuteczność. Obecnie diagnostyka izolacji
opiera się na jak najszybszym i najdokładniejszym rozpoznaniu czy uszkodzenie
(ubytek) występuje, na odnalezieniu miejsca wystąpienia uszkodzenia oraz ustalenie
poziomu degradacji izolacji. Szereg zjawisk fizycznych występujących w miejscach
uszkodzeń jest istotną informacją na temat ubytków w badanym obiekcie. Jednym z
takich zjawisk są wyładowania niezupełne występujące w zniszczonych izolacjach
przewodów elektrycznych oraz urządzeń elektroenergetycznych. Wyładowania
niezupełne - WNZ (z ang. Partial Discharges - PD) są obiektem licznych badań
laboratoryjnych oraz terenowych. Opracowano wiele sposobów mierzenia tego
__________________________________________
* Politechnika Opolska.
130
Łukasz Nagi, Piotr Schneider
zjawiska, z których najbardziej efektywne są metody nieinwazyjne. Wśród nich
można wymienić takie jak np. metoda ultradźwiękowa, elektromagnetyczna czy
rejestracji widma optycznego [1 - 4]. Jednym z najnowszych odkryć dotyczących
zjawiska WNZ jest zarejestrowanie szpilek promieniowania rentgenowskiego
towarzyszącego wyładowaniom [5, 6]. Energia mierzonej radiacji pozwala na
wykonanie zdjęć rentgenowskich [7]. Możliwe również jest to, że istnieją inne rodzaje
promieniowania towarzyszące wyładowaniom niezupełnym. Ekspozycja obiektów
wszelkiego rodzaju takich jak urządzenia elektroenergetyczne, przewody elektryczne
czy też pracownicy bezpośrednio pracujący przy urządzeniach z wadliwą izolacją, na
to promieniowanie może powodować dodatkowe szkody. Promieniowanie jonizujące
jako zjawisko fizyczne jest istotnym oddziaływaniem na otaczający nas świat.
Reaguje z materią, a jego różne rodzaje (promieniowania jonizującego) mają wpływ
na jej budowę, powstające defekty w strukturze danego materiału oraz zmiany składu
pierwiastkowego wynikającego ze zmian promieniotwórczych. Tym bardziej istotne
jest opracowanie skutecznej metody do wykrywania jednocześnie WNZ i
promieniowania jonizującego towarzyszącego temu zjawisku elektrycznemu.
2. PROMIENIOWANIE JONIZUJĄCE WYNIKAJĄCE Z WNZ
Podczas wyładowań występujących w izolacji kabla obserwowano pojawienie się
promieniowania rentgenowskiego. Zarejestrowana dawka radiacyjna jest w stanie
przeniknąć przez cienkie warstwy lekkich metali. Istnieje szansa zrobienia zdjęcia
rentgenowskiego porów powietrza w izolacji kabli elektrycznych lub innych
uszkodzeń występujących przy WNZ co dałoby możliwość nieinwazyjnego
sprawdzenia poziomu uszkodzeń izolacji.
W publikacjach dotyczących promieniowania X-ray i PD wykazano, że składnik
rentgenowski wyładowań niezupełnych jest tak zwanym promieniowaniem
hamowania, a liczba aktów rejestrowanych jest zależna zarówno od ilości powietrza w
porach, gdzie występuje WNZ, jak i liczby atomowej Z pierwiastków wchodzących w
skład mieszaniny powietrznej. Zgodnie ze wzorem (1):
C( Z( 0 ) bZ 4 )
P
(1)
R2
gdzie: P liczba zliczeń aktów jonizacyjnych, C ilość gazu w porach gdzie
występuje WNZ, Z liczba atomowa pierwiastków gazu, R odległości między
atomami pierwiastków.
Dane, dla których stworzono aplikację pochodzą z badania zależność dawki
promieniowania wynikającej z WNZ od napięcia wywołującego wyładowania oraz w
zależności od odległości sondy od źródła PD. Do symulacji wykorzystano
eksperyment, w którym zmieniany był również materiał, z którego składały się
elektrody wytwarzające wyładowania niezupełne. Widok okna wyboru opcji oraz
generowania wykresów przedstawiono na rys. 1.
Wykorzystanie środowiska MATLAB do tworzenia aplikacji i symulacji …
131
Rys. 1. Widok okna aplikacji wraz z opisem możliwości opracowywania danych
3. APLIKACJA WSPOMAGAJĄCA OPRACOWYWANIE
WYNIKÓW POMIARÓW
Aplikacja pozwala odczytywać dane zapisane w plikach Excel. Po
zaimportowaniu wyników eksperymentu pojawiają się one w oknie gdzie można
łatwo kontrolować czy to właśnie z nimi chcemy w danej chwili pracować. Dzięki
programowi możemy generować wykresy zależności danych rejestrowanych od
warunków początkowych dla różnych materiałów oraz ze względu na różne
kryteria wyboru. Przykładowym wykresem generowanym przez aplikację jest
zależność rejestrowanej mocy dawki od napięcia wywołującego WNZ
przedstawiona na rys. 2, gdzie materiałem elektrod była miedź. Ośrodkiem, w
którym rozpraszane było promieniowanie było powietrze.
Rys. 2. Zależność mocy dawki promieniowania od odległości od źródła WNZ P = f(r)
132
Łukasz Nagi, Piotr Schneider
Aplikacja pozwala również na generowanie kilku wykresów przed
eksportowaniem jednego z nich do pliku jpg w zależności od wybranego rozkładu
matematycznego w celu jak najlepszego dopasowania krzywej do danych.
Przykładowy wykres z najlepszym dopasowaniem przedstawiony jest na rys. 3.
Rys. 3. Zależność mocy dawki promieniowania od napięcia wywołującego WNZ P = f(U). Najlepsze
dopasowanie dzięki rozkładowi logarytmicznemu
4. WNIOSKI
Wykrywanie i opisywanie promieniowania jonizującego wynikającego z WNZ
może stać się kolejną nieinwazyjną metodą detekcji uszkodzeń w izolacjach oraz
występujących w nich wyładowań niezupełnych. Opracowanie danych
pomiarowych sprawiłoby, że można by również lepiej opisywać procesy
energetyczne w tego typu zjawiskach fizycznych. Większa paleta składników w
bilansie energetycznym sprawi, że lepiej będziemy mogli zrozumieć mechanizmy
powstawania i rozchodzenia się zaburzeń związanych z wyładowaniami
elektrycznymi. Ponadto warto zauważyć, że program MATLAB jest również
bardzo dobrym środowiskiem do tworzenia wszelkiego rodzaju aplikacji
wspomagających opracowywanie danych pomiarowych jak i do symulacji samych
zjawisk, które badamy.
LITERATURA
[1]
[2]
D.Wotzka, D. Zmarzly, T. Boczar: Numerical Simulation of Acoustic Wave
Propagating in a Spherical Object Filled with Insulating Oil, Acta Physica Polonica
A, Vol. 118, Is. 6, pp. 1272-1275, 2010.
P. Frącz, “Influence estimation of the voltage value on the measurements results for
the optical radiation generated by partial discharges on bushing isolator”, Acta Phys.
Pol. A, Vol. 120, pp. 604-608, 2011.
Wykorzystanie środowiska MATLAB do tworzenia aplikacji i symulacji …
[3]
[4]
[5]
[6]
[7]
133
A.Cichoń, The application of the selected time-frequency descriptors detection of the
acoustic emission signals generated by multisource partial discharges, Acta Phys. Pol.
A, Vol. 116, pp.290-293, 2009.
S.Borucki, Time-Frequency Analysis of Mechanical Vibrations of the Dry Type
Power Transformer Core, Acta Phys. Pol. A, Vol. 120, pp. 571-574, 2011.
Dwyer, J. R., Z. Saleh, H. K. Rassoul, D. Concha, M. Rahman, V. Cooray, J. Jerauld,
M. A. Uman, and V. A. Rakov (2008), A study of X-ray emission from laboratory
sparks in air at atmospheric pressure, J. Geophys. Res., 113, D23207,
doi:10.1029/2008JD010315.
Cooray, V., J. R. Dwyer, V. Rakov, and M. Rahman (2010), On the mechanism of Xray production by dart leaders of lightning flashes, J. Atmos. Sol. Terr. Phys., 72(11–
12), 848–855, doi:10.1016/j.jastp.2010.04.006.
Novikov G.K., Smirnov A.I., Fedchiskin V.V. Detection of X-Ray Radiation of
Partial Discharges in Polymeric Cable Insulation. Russian Electrical Engineering,
2009.
THE USE OF MATLAB TO CREATE THE APPLICATION AND SUPPORTING
SIMULATION IN PARTIAL DISCHARGE RESEARCH
The article presents the results of which were obtained as a result of an experiment to
generate radiation with the participation of partial discharges caused a faulty electrical
insulation. We performed a simulation of the above-mentioned physical phenomenon,
based on the recorded data. For the purposes of the experiment also created an application
to automatically download and pre-compiling the data. Both of them: simulation which was
created and the application has been made in MATLAB environment. Article also presents
a brief description of current research methods PD and suggests further ideas for
developing the experiment.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Grzegorz DOMBEK*
Zbigniew NADOLNY*
Piotr PRZYBYŁEK*
WŁAŚCIWOŚCI CIEPLNE NANOCIECZY
ELEKTROIZOLACYJNYCH W ASPEKCIE ICH
WYKORZYSTANIA W UKŁADZIE IZOLACYJNYM
TRANSFORMSATORÓW ENERGETYCZNYCH
W artykule przedstawiono informacje dotyczące właściwości elektrycznych i cieplnych
nanocieczy elektroizolacyjnych w aspekcie ich wykorzystania w układzie izolacyjnym
transformatorów energetycznych. Artykuł składa się z pięciu rozdziałów. Pierwszy
rozdział stanowi wprowadzenie. W drugim rozdziale przedstawiono metody
przygotowania nanocieczy. W rozdziale trzecim przedstawione zostały właściwości
nowoczesnych cieczy elektroizolacyjnych zbudowanych na bazie oleju mineralnego i
nanocząsteczek. W rozdziale czwartym porównano lepkość i przewodność cieplną oleju
mineralnego z lepkością i przewodnością nanocieczy. Artykuł zakończony jest
podsumowaniem.
SŁOWA KLUCZOWE: nanociecze, transformator, właściwości cieplne
1. WPROWADZENIE
Transformator energetyczny jest jednym z najbardziej newralgicznych i
kosztownych urządzeń wchodzących w skład systemu elektroenergetycznego. Od
ponad stu lat do jego chłodzenia stosuje się głównie oleje mineralne. W
przeszłości niska temperatura zapłonu oraz niezadowalające właściwości cieplne
olejów mineralnych były niejednokrotnie przyczyną awarii i pożaru
transformatora. Skutkiem tego były przede wszystkim duże straty materialne oraz
powstanie zagrożenia dla ludzi i środowiska naturalnego. Skuteczna i bezawaryjna
praca transformatora warunkowana jest m.in. właściwościami cieczy
elektroizolacyjnej, którą jest on wypełniony. Wraz ze wzrostem obciążenia
transformatora rośnie jego temperatura wewnętrzna, a co za tym idzie skraca się
jego żywotność. Długość życia transformatora zależna jest przede wszystkim od
czasu życia izolacji uzwojeń transformatora, który z kolei zależy od czasu
eksploatacji i temperatury [1]. Dotychczas stosowane mineralne oleje
__________________________________________
* Politechnika Poznańska.
136
Grzegorz Dombek, Zbigniew Nadolny, Piotr Przybyłek
transformatorowe mają dość dobre właściwości elektryczne, ale niestety
charakteryzują się słabymi właściwościami cieplnymi, przez co ich właściwości
chłodzące nie są w wielu przypadkach wystarczające.
Obecnie w kilku ośrodkach naukowych na świecie trwają prace związane z
modyfikacją cieczy elektroizolacyjnych w celu poprawienia ich właściwości
zarówno elektrycznych, jak i cieplnych [2, 3, 5-7].
Poprawa właściwości cieplnych cieczy elektroizolacyjnych może zostać
uzyskana poprzez dodanie do nich nanomateriałów. Powstałe w ten sposób
nanociecze mogą mieć charakter roztworów właściwych lub koloidów. W
roztworach właściwych nanomateriały są rozpuszczone w cieczy bazowej
natomiast w koloidach są zdyspergowane i zawieszone w całej objętości.
W niniejszej pracy przedstawiono wyniki badań wpływu obecności dwóch
wybranych nanomateriałów w oleju mineralnym na jego przewodność cieplną i
lepkość. Obie te wielkości determinują w głównej mierze przekazywanie ciepła,
które decyduje o skuteczności chłodzenia. Wykorzystanymi do badań
nanomateriałami były C60 oraz TiO2.
2. PRZYGOTOWANIE NANOCIECZY
W rozdziale omówione zostały metody przygotowania nanocieczy
elektroizolacyjnych zbudowanych na bazie oleju mineralnego i nanocząsteczek.
Nanocząsteczki należą do związków trudno rozpuszczalnych lub
nierozpuszczalnych w cieczach elektroizolacyjnych. Przykładem nanomateriału,
który rozpuszcza się w cieczach elektroizolacyjnych jest fuleren C60. W zależności
od stężenia fulerenu w cieczy bazowej czas jego rozpuszczania wynosi od dwóch
do kilku tygodni. W przypadku innych nanomateriałów, takich jak Al2O3, SiO2,
SiC, Fe2O3 i TiO2, dodanych do cieczy izolacyjnej niemożliwe jest uzyskanie
roztworu właściwego. W celu równomiernego rozproszenia tych materiałów w
cieczy bazowej niezbędne jest dodanie do niej środka powierzchniowo czynnego.
W zależności od stężenia nanocząsteczek w cieczy bazowej, dodanie do niej
samych tylko nanocząsteczek może skutkować zaistnieniem procesu sedymentacji
(opadanie zawiesiny ciała stałego pod wpływem sił grawitacji). W rezultacie spora
ich część może osadzać się na elementach układu izolacyjnego pogarszając jego
właściwości. Jak wcześniej wspomniano jednym z rozwiązań pozwalających na
przeciwdziałanie procesowi sedymentacji jest zastosowanie środków
powierzchniowo czynnych, tzw. dyspergatorów. Dyspergatory są to substancje
powierzchniowo czynne pozwalające na tworzenie stabilnych zawiesin oraz
rozdrabnianie większych cząstek. W zależności od zastosowanych nanocząsteczek
i cieczy bazowej do przygotowywania stabilnych zawiesin koloidalnych konieczne
jest zastosowanie różnych substancji powierzchniowo czynnych. Istotny jest też
dobór odpowiedniego stężenia dyspergatora w cieczy bazowej. Substancje
Właściwości cieplne nanocieczy elektroizolacyjnych w aspekcie …
137
powierzchniowo czynne należy dodawać bezpośrednio do cieczy bazowej, przy
czym w celu uzyskania efektu równomiernego rozproszenia w cieczy, poddaje się
je często procesowi sonikacji (działaniu ultradźwięków). Do tak przygotowanej
cieczy bazowej, dodaje się nanocząsteczki, które również poddaje się działaniu
ultradźwięków. W zależności od rodzaju zastosowanych nanocząsteczek oraz
cieczy bazowej, w celu równomiernego rozproszenia nanocząstek i stabilnego
zawieszenia ich w cieczy bazowej, należy stosować różne czasy procesu sonikacji.
Ponadto sonikację należy przeprowadzać w łaźni zapewniającej utrzymanie stałej
temperatury w nanocieczy. Przed przeprowadzeniem badań próbki nanocieczy
należy odstawić na kilka godzin w celu wyeliminowania mikropęcherzyków
powietrza powstających w trakcie procesu sonikacji.
3. WŁAŚCIWOŚCI NONOCIECZY
W niniejszym rozdziale, w oparciu o dane literaturowe, przedstawione zostały
właściwości elektryczne nanocieczy elektroizolacyjnych powstałych na bazie
takich nanomateriałów jak TiO2 oraz C60.
Pomysł zastosowania nanocieczy elektroizolacyjnych, w miejsce dotychczas
stosowanych mineralnych olejów transformatorowych, pojawił się stosunkowo
niedawno. Jak wcześniej wspomniano w kilku ośrodkach naukowych na świecie
prowadzone są badania dotyczące modyfikacji cieczy elektroizolacyjnych. Mają
one na celu poprawę ich właściwości elektrycznych oraz skuteczności chłodzenia.
W pracy [2] przedstawiono wyniki badań nad wpływem półprzewodnikowych
nanocząsteczek TiO2 na właściwości elektroizolacyjne oleju mineralnego.
Cząsteczki TiO2 dodawane były do oleju transformatorowego w celu utworzenia
półprzewodnikowej nanocieczy (SNF – ang. Semiconductive NanoFluid)
charakteryzującej się ulepszonymi, w stosunku do czystego oleju, właściwościami
elektrycznymi. W tabeli 3.1 przedstawiono porównanie uzyskanych wyników dla
SNF z danymi dla czystego oleju mineralnego. W wyniku przeprowadzonych
testów stwierdzono, że SNF charakteryzuje się o 20% większą wytrzymałością
elektryczną przy napięciu stałym, przemiennym i udarowym, w porównaniu z
czystym olejem mineralnym [5]. Taka nanociecz charakteryzuje się również dużo
większą odpornością na wyładowania niezupełne. Wartość rezystywności SNF
odniesiona do wartości rezystywności oleju mineralnego (tab. 3.2) jest mniejsza,
jednakże nadal spełnia wymagania dotyczące rezystywności stawiane cieczom
elektroizolacyjnym w eksploatacji. Natomiast względna przenikalność elektryczna
SNF przewyższa przenikalność elektryczną oleju mineralnego, co jest korzystne
dla rozkładu pola elektrycznego w izolacji papierowo-olejowej [4].
Wyniki badań zaprezentowane w pracach [6, 8], dotyczące właściwości
mineralnych olejów transformatorowych domieszkowanych fulerenami C60
wskazują, że mogą one mieć pozytywny wpływ na niektóre parametry
138
Grzegorz Dombek, Zbigniew Nadolny, Piotr Przybyłek
elektryczne, zarówno świeżych jak i zestarzonych olejów. Przedstawione w tych
pracach wyniki pokazują, że poprawa parametrów elektrycznych cieczy
elektroizolacyjnej możliwa jest przy różnych stężeniach fulerenu C60. Jednakże ze
względu na uzyskanie poprawy zarówno współczynnika strat dielektrycznych,
rezystywności, jak i przenikalności elektrycznej zaleca się stosowanie stężeń 8
mg/l i 16 mg/l [8]. W zależności od stężenia fulerenu C60 możliwa jest również
zmiana prądu elektryzacji. Ze względu na ten parametr optymalne stężenie C 60 w
oleju mineralnym wynosi 100 mg/l [6].
Tabela 3.1. Porównanie wytrzymałości elektrycznej oleju mineralnego z SNF
dla napięcia przemiennego (AC), stałego (DC+ i DC-) oraz udarowego [5]
Materiał
Napięcie
przebicia
(AC)
Napięcie
przebicia
(DC+)
Napięcie
przebicia
(DC-)
Udarowe
napięcie
przebicia
kV
kV
kV
kV
Czas do
przebicia
przy
napięciu
udarowym
μs
67,9
49,1
66,3
77,6
15,2
30,6
80,9
45,1
84,6
95,9
23,3
33,1
Olej
mineralny
SNF
Napięcie
zapłonu
wyładowań
niezupełnych
kV
Tabela 3.2. Porównanie przenikalności elektrycznej
i rezystywności oleju mineralnego i SNF [5]
Materiał
Olej mineralny
SNF
Przenikalność elektryczna
2,26
3,92
Rezystywność
Ω∙m
1,82∙1012
8,30∙1010
Analizując przedstawione w tym rozdziale właściwości nanocieczy można
stwierdzić, że charakteryzują się one wieloma pozytywnymi właściwościami
istotnymi z punktu widzenia wymagań stawianych cieczom elektroizolacyjnym.
Niewątpliwie konieczne jest przeprowadzenie licznych badań ich właściwości, w
tym także cieplnych, pozwalających w pełni stwierdzić, czy korzystne jest ich
zastosowanie w transformatorach energetycznych.
4. WŁAŚCIWOŚCI CIEPLNE NANOCIECZY – WYNIKI BADAŃ
W rozdziale przedstawione zostały wyniki pomiarów lepkości i przewodności
cieplnej właściwej cieczy elektroizolacyjnych.
Do badań wykorzystano następujące ciecze elektroizolacyjne:
olej mineralny,
olej mineralny + C60 – stężenie fulerenu w oleju 100 mg/l,
Właściwości cieplne nanocieczy elektroizolacyjnych w aspekcie …
139
olej mineralny + SPAN – stężenie SPANU w oleju 5 g/l (SPAN – substancja
powierzchniowo czynna, C18H34O6),
olej mineralny + SPAN + TiO2 – stężenie SPANU i TiO2 kolejno 5 g/l i 0,204 g/l.
Wszystkie domieszkowane ciecze poddano procesowi sonikacji w celu
rozpuszczenia lub zawieszenia dodawanego modyfikatora w cieczy bazowej. W
przypadku fulerenu uzyskano roztwór właściwy. W przypadku nanocząsteczek TiO2
niemożliwe było ich rozpuszczenie w oleju mineralnym. Z tego względu podjęto
próbę uzyskania koloidu poprzez zastosowanie substancji powierzchniowo czynnej.
Pomiary lepkości przeprowadzone zostały przy pomocy układu zbudowanego
zgodnie z normą [9]. Natomiast pomiary przewodności cieplnej wykonano za
pomocą autorskiego układu pomiarowego opisanego w artykule [10].
W tabeli 4.1 i na rysunkach 4.1 i 4.2 przedstawiono wyniki badań lepkości i
przewodności cieplnej oleju mineralnego, oleju mineralnego z środkiem
powierzchniowo czynnym oraz nanocieczy powstałych w wyniku dodania do oleju
mineralnego fulerenu C60 oraz nanocząsteczek TiO2.
Uzyskane wyniki potwierdziły wpływ temperatury na badane właściwości
oleju mineralnego. Wzrost temperatury powodował spadek lepkości i wzrost
przewodności cieplnej oleju. Uzyskane wyniki są zgodne z danymi
literaturowymi. Przeprowadzone badania wykazały wpływ nanomateriałów i
substancji powierzchniowo czynnej na właściwości cieczy elektroizolacyjnych.
Najmniejszy wpływ na lepkość wywierał fuleren C60. W przypadku TiO2
konieczne było dodanie do oleju środka powierzchniowo czynnego w celu
uzyskania koloidu. Dodanie środka powierzchniowo czynnego spowodowało
również wzrost wartości lepkości względem cieczy bazowej. Największy wzrost
lepkości zaobserwowano w przypadku oleju mineralnego modyfikowanego
zarówno cieczą powierzchniowo czynną, jak i TiO2.
Przewodność cieplna oleju mineralnego domieszkowanego nanomateriałem C60
oraz oleju modyfikowanego substancją powierzchniowo czynną nie zmieniła się w
stosunku do przewodności oleju mineralnego. Wzrost przewodności cieplej
zauważalny był tylko w przypadku koloidu powstałego przez dodanie TiO2.
Tabela 4.1. Wyniki badań lepkości i przewodności cieplnej oleju mineralnego,
oleju mineralnego z substancją powierzchniowo czynną oraz nanocieczy
w zależności od temperatury; λ - przewodność cieplna, υ - lepkość
Olej mineralny
Temperatura
25°C
40°C
60°C
80°C
100°C
Olej mineralny
+C60
λ
υ
Olej mineralny
+SPAN
λ
υ
Olej mineralny
+SPAN +TiO2
λ
υ
λ
υ
W/m·K
mm2/s
W/m·K
mm2/s
W/m·K
mm2/s
W/m·K
mm2/s
0,135
0,132
0,128
0,126
0,124
17,11
9,79
5,43
3,44
2,71
0,135
0,132
0,128
0,126
0,124
17,38
9,86
5,46
3,56
2,74
0,135
0,132
0,128
0,126
0,124
17,61
9,87
5,81
3,61
2,78
0,143
0,135
0,130
0,129
0,127
17,99
10,18
6,10
3,69
2,81
140
Grzegorz Dombek, Zbigniew Nadolny, Piotr Przybyłek
Rys. 4.1. Porównanie lepkości badanych cieczy elektroizolacyjnych
Rys. 4.2. Porównanie przewodności cieplnej badanych cieczy elektroizolacyjnych
Właściwości cieplne nanocieczy elektroizolacyjnych w aspekcie …
141
5. PODSUMOWANIE
W kilku ośrodkach naukowych na świecie prowadzone są badania mające na
celu poprawę właściwości cieczy elektroizolacyjnych. Poprawa właściwości
możliwa jest poprzez domieszkowanie cieczy bazowych za pomocą
nanomateriałów. Powstałe w ten sposób nanociecze należy zbadać w aspekcie
kluczowych ze względu na eksploatację transformatora właściwości.
Niewątpliwie, z punktu widzenia skuteczności chłodzenia urządzeń
elektroenergetycznych, konieczne jest zbadanie właściwości cieplnych nanocieczy
elektroizolacyjnych.
Wyniki przedstawionych w artykule badań świadczą o wpływie
nanocząsteczek TiO2 na właściwości cieplne nanocieczy. Przeprowadzone badania
wykazały wzrost lepkości i przewodności cieplnej nanocieczy w stosunku do
czystego oleju mineralnego. Wzrost przewodności cieplnej jest pożądany ze
względu na skuteczność chłodzenia, natomiast wzrost lepkości utrudnia transport
ciepła. Oprócz badanych w artykule lepkości i przewodności cieplnej o
skuteczności chłodzenia decydują również ciepło właściwe, gęstość i
współczynnik rozszerzalności cieplej. Definitywne stwierdzenie, czy badana
nanociecz usprawni transport ciepła wymaga zbadania wszystkich tych
właściwości.
Badania przeprowadzone na oleju mineralnym domieszkowanym fulerenem nie
wykazały poprawy przewodności cieplnej nanocieczy.
LITERATURA
[1] ANSI/IEEE, IEEE Guide for Loading Mineral Oil-Immersed Transformers C57.91,
1995.
[2] Du Y., Lv Y., Li C., Chen M., Zhomg Y., Zhou J., Li X., Zhou Y., Effect of
semiconductive nanoparticles on insulating performances of transformer oil, IEEE
transactions on Dielectrics and Electrical Insulation, Vol. 19, no. 3, June, 2012.
[3] Chiesa M., Sarit K. Das, Experimental investigation of the dielectric and cooling
performance of colloidal suspensions in insulating media, Colloid and surfaces A:
Physicochemical and Engineering Aspects, p. 88-97, 2009.
[4] Dombek G., Nadolny Z., Przybyłek P., Porównanie estrów naturalnych i olejów
mineralnych w aspekcie wykorzystania w transformatorach energetycznych wysokich
napięć, Poznan University of Technology Academic Journals Electrical Engineering,
vol. 74, s. 151-158, Poznań, 2013.
[5] Aksamit P., Zmarzły D., Dielectric properties of fullerene-doped insulation liquids,
IEEE Conference on Electrical Insulation and Dielectric Phenomena, p.212-215, 1821 October, 2009.
[6] Aksamit P. Zmarzły D., Boczar T., Electrostatic properties of aged fullerene-doped
mineral oil, IEEE Transactions and Dielectrics and Electrical Insulation, vol. 18,
no.5, p. 1459-1462, October, 2011.
142
Grzegorz Dombek, Zbigniew Nadolny, Piotr Przybyłek
[7] Li J., Zhang Z., Zou P., Grzybowski S., Zahn M., Preparation of a vegetable oilbased nanofluids and investigation of its breakdown and dielectric properties, IEEE
Electrical Insulation Magazine, vol. 28, no. 5, p. 43-50, Septemper-October, 2012.
[8] Aksamit. P., Zmarzły D., Boczar T., Szmechta M., Aging properties of fullerene
doped transformer oils, Conference Record of the 2010 IEEE International
Symposium on Electrical Insulation (ISEI), p. 1-4, 6-9 June, 2010.
[9] PN-EN 3104:2004, Przetwory naftowe Ciecze przezroczyste i nieprzezroczyste.
Oznaczanie lepkości kinematycznej i obliczanie lepkości dynamicznej.
[10] Dombek G., Nadolny Z., Autorski układ do pomiaru przewodności cieplnej
właściwej cieczy elektroizolacyjnych, Poznan University of Technology Academic
Journals Electrical Engineering, vol. 74, pp. 159-166, Poznań, 2013.
THERMAL PROPERTIES OF INSULATING NANOFLUIDS
IN THE ASPECT OF THEIR USAGE IN THE INSULATING SYSTEM
OF POWER TRANSFORMERS
This paper presents an information regarding the thermal properties of insulating
nanofluids in the aspect of their usage in the insulating system of power transformers. It
consists of five chapters. The first chapter is an introduction. The second chapter presents
the method of preparation of nanofluids The third chapter describes the electrical
properties of modern insulating liquids based on nanoparticles and mineral oil. The fourth
chapter is devoted to the comparison of viscosity and thermal conductivity of mineral oil
with viscosity and thermal conductivity of nanofluids. Article ends with a summary.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Grzegorz MALINOWSKI*
Krzysztof SIODŁA*
PORÓWNANIE PROGRAMÓW MAXWELL ORAZ FEMM
DO SYMULACJI ROZKŁADU NATĘŻENIA POLA
ELEKTRYCZNEGO
W artykule przedstawiono ogólne różnice między dwoma programami służącymi do
wykreślania rozkładu natężenia pola elektrycznego. Omówiono interfejs użytkownika,
jego wady i zalety oraz przedstawiono motywację podjęcia tego typu badań.
Przedstawiono założenia projektowe przyświecające wykreśleniu danych układów.
Pokazano rozkład natężenia pola elektrycznego oraz wykresy funkcji tej wielkości w
zależności od odległości między elementami. Artykuł kończy podsumowanie z wadami i
zaletami każdego programu.
SŁOWA KLUCZOWE: Maxwell, FEMM, FEM, pole elektryczne, symulacja, rozkład
pola elektrycznego, porównanie
1. WPROWADZENIE ORAZ MOTYWACJA
Graficzny interfejs użytkownika Program Ansoft Maxwell jest zaprojektowany
dla środowiska Unixowego (rys. 1.1), przez co dla osoby przyzwyczajonej do
środowiska Windows może sprawiać wrażenie skomplikowanego. Jest płatnym
programem komercyjnym, z darmową wersją studencką 9.0 (SV), z 2006 roku,
która była testowana w wykonywanych badaniach. Program Finite Element
Method Magnetics (FEMM) (rys. 1.1) jest programem wydanym w 2013 roku i
udostępniany jest na licencji publicznej, a autorem jest David C. Meeker (członek
IEEE) [4]. Program pracuje w środowisku Windows i jego wygląd nie odbiega od
innych programów działających w tym środowisku, co powoduje, że jest bardziej
przyjazny dla użytkownika. Testowano wersję 4.2 programu.
Zdecydowano się na symulację rozkładu natężenia pola ze względu na jej
potrzebę przy projektowaniu urządzeń elektrycznych poddawanych obciążeniu
elektrycznemu [2] (np. izolatory, układy badawcze) w celach informacyjnych (np.
czy w projektowanym urządzeniu przy danym napięciu, na detalu wystąpi ulot)
oraz obliczeniowych, np. współczynnik niejednorodności pola. Porównano
__________________________________________
* Politechnika Poznańska.
144
Grzegorz Malinowski, Krzysztof Siodła
działanie obu programów w celu sprawdzenia ich przydatności do wykonywanych
analiz, niezbędnych na etapie projektowania rzeczywistych obiektów badań
eksperymentalnych.
a)
b)
Rys. 1.1. Graficzny interfejs użytkownika programów a) Maxwell, b) FEMM
2. ZAŁOŻENIA PROJEKTOWE
Jako stałe przyjęto średnice kul 2R = 20 mm, odległość elementów (kula, płyta,
walec) od kuli d = 10 mm, oraz siatkę dyskretyzującą na poziomie 4100 trójkątów.
Wynikało to z faktu, że jest to ilość zadana domyślnie w projektowanym układzie
w programie FEMM, co w zupełności wystarcza, żeby dobrze odwzorować
rozkład natężenia pola. W programie Maxwell siatka została zwiększona do 4100
trójkątów. Dokładniej to omówiono w rozdziale trzecim. Ponieważ program
Maxwell ma domyślnie ograniczoną wielkość przestrzeni do szkicowania,
sztucznie ograniczono przestrzeń programu FEMM. Odległości kul i ich promień
dobrano tak, żeby tworzyły układ jednorodny (współczynnik niejednorodności
równy wartości 1).
Zasymulowano trzy układy o zasilaniu niesymetrycznym (tj. jedna elektroda
pod wysokim napięciem równym 100 kV, druga uziemiona): układ kula-kula,
kula-płyta oraz układ dwóch walców współosiowych. W niesymetrycznym
układzie największe natężenie pola elektrycznego jest przy elektrodzie znajdującej
się pod wysokim napięciem oraz gęstość linii ekwipotencjalnych jest największa
[1]. Na rysunkach 2.1-2.3 przedstawiono w formie graficznej rozkład natężenia
pola elektrycznego oraz linie ekwipotencjalne dla w/w układów. Na rysunkach
2.4-2.6 przedstawiono ten sam rozkład w funkcji odległości między elementami.
Porównanie programów Maxwell oraz FEMM do symulacji rozkładu …
a)
b)
Rys. 2.1. Porównanie rozkładu natężenia pola w układzie kula-kula w programie a) Maxwell,
b) FEMM
a)
b)
Rys. 2.2. Porównanie rozkładu natężenia pola w układzie kula-płyta w programie a) Maxwell,
b) FEMM
a)
b)
Rys. 2.3. Porównanie rozkładu natężenia pola w układzie dwóch walców współosiowych
w programie a) Maxwell, b) FEMM
145
146
Grzegorz Malinowski, Krzysztof Siodła
a)
b)
Rys. 2.4. Wykres rozkładu natężenia pola elektrycznego w funkcji odległości dla układu kula-kula
w programie a) Maxwell, b) FEMM. OX – odległość [mm], OY – natężenie pola elektrycznego [V/m]
a)
b)
Rys. 2.5. Wykres rozkładu natężenia pola elektrycznego w funkcji odległości dla układu kula-płyta
w programie a) Maxwell, b) FEMM. OX – odległość [mm], OY – natężenie pola elektrycznego [V/m]
a)
b)
Rys. 2.6. Wykres rozkładu natężenia pola elektrycznego w funkcji odległości dla układu dwóch
walców współosiowych w programie a) Maxwell, b) FEMM. OX – odległość [mm], OY – natężenie
pola elektrycznego [V/m]
Porównanie programów Maxwell oraz FEMM do symulacji rozkładu …
147
3. ANALIZA I WNIOSKI
Jak pokazano na rysunkach 2.1-2.3 przy zbliżonej zadanej ilości trójkątów,
rozkład natężenia pola przyjmuje zbliżone wartości. Linie ekwipotencjalne
pokrywają się w obu programach ze sobą. Sposób zadawania wartości mimo, że z
innym interfejsem użytkownika, dla każdego programu jest podobny. W obu
przypadkach należy najpierw zdefiniować model na siatce. O ile w programie
FEMM nie ma ograniczeń względem wielkości rysowania (teoretycznie, bo
problemy zaczynają się w momencie posiadania obiektów o różnicy wielkości 106
mm na jednej kartce), o tyle w programie Maxwell pole rysowania jest
ograniczone. Sprowadza się to do tego, że projektant musi martwić się o skalę w
przypadku rysowania w programie Maxwell. Program FEMM jest pod tym
względem bardziej podobny do programów typu CAD.
O ile wartości natężenia pola elektrycznego oraz linie ekwipotencjalne są
zbliżone (rys. 2.1-2.3), o tyle wykresy rozkładu pola w funkcji odległości różnią się
i to znacząco: wykresy rysowane w programie Maxwell są uproszczone (mają
mniej punktów pomiarowych). W programie FEMM jest możliwość
zadeklarowania ilości punktów pomiarowych (domyślnie 150). Najlepiej widać to
na rysunku 2.5, gdzie w programie Maxwell widać tyko trzy punkty pomiarowe.
Po wygenerowaniu wykresów XY w programie Maxwell, można opisać osie. Tej
możliwości nie ma w programie FEMM, aczkolwiek dane wyjściowe z tego
programu można zapisać do pliku tekstowego i później je edytować (dzięki czemu
można określić np. współczynnik niejednorodności pola), czego nie można zrobić
w programie Maxwell.
W programie Maxwell wykres rozkładu natężenia pola lub każdej innej funkcji
jest warstwowy, tj. rysowane funkcje nakładają się na siebie w formie stosu [3] i
nie można wrócić do wcześniejszej funkcji bez usunięcia późniejszych. Żeby ją
usunąć, trzeba wybrać opcję usuwania, a następnie dopiero usunąć daną funkcję
lub nadpisać nową. W programie FEMM nie ma funkcji usuwania, bieżąco
rysowana funkcja jest jedyną istniejącą. Nie ma odkładania funkcji na stos.
Sprowadza się to do tego, że jeśli chce się usunąć z rysunku linie ekwipotencjalne,
w programie Maxwell trzeba wejść w funkcje usuwania i wybrać dany element do
usunięcia. W programie FEMM można wyłączyć funkcję linii ekwipotencjalnych.
Dodatkowo, programu Maxwell można używać tylko w minimalnej
rozdzielczości w pionie równej 864 pikseli. Wyświetlanie obrazu poniżej tej
wartości powoduje, że niektóre opcje programu są ucięte dołem ekranu (program
nie zmienia położenia przy zmianie rozdzielczości), co powoduje, że program jest
bezużyteczny dla monitorów 15,6" (16:9, stosowane w laptopach) i mniejszych.
Program FEMM dostosowuje się do wielkości okna, lub rozdzielczości.
Ilość trójkątów w programie FEMM określa się podając minimalny kąt ostry
jednego trójkąta w zakresie 8-30° lub zagęszczając trójkąty przystające do danego
148
Grzegorz Malinowski, Krzysztof Siodła
elementu (co jest funkcją bardziej skomplikowaną, niż w programie Maxwell). Na
potrzeby symulacji nałożono siatkę dyskretyzującą na układ w programie FEMM,
odczytano wartość domyślną (ok 4100 trójkątów) i następnie ze względu na tą
wartość zadano ją w programie Maxwell, gdzie zwiększenie ilości trójkątów
następuje przez zaznaczenie danego obszaru i wpisaniu ilości trójkątów, które mają
być w wewnątrz tego obszaru.
Po opanowaniu programów, szybkość projektowania i analizy pola
elektrycznego jest porównywalna. Z powodu na początkowe wrażenie
skomplikowania programu Maxwell, może on wydawać się trudniejszy do
opanowania. Czas spędzony na uczenie się obsługi programu Maxwell można
przeznaczyć na projektowanie układów w programie FEMM.
Tabela 3.1. Porównanie wybranych funkcji programu Maxwell i FEMM
Ansoft Maxwell
Prosta dyskretyzacja całości oraz wybranego
obszaru
Ograniczony obszar rysowania,
Ograniczenie funkcji programu poprzez
rozdzielczość ekranu
Uproszczone wykresy XY
Warstwowe nakładanie funkcji, konieczność
ręcznego usuwania każdej funkcji
FEMM
Prosta dyskretyzacja całości, skomplikowana
dyskretyzacja obszaru
Nieograniczony obszar rysowania
Dowolna rozdzielczość pracy programu
Dowolna dokładność wykresu XY
Jedna funkcja w danym momencie
LITERATURA
[1]
[2]
[3]
[4]
Mościcka-Grzesiak H. (pod redakcją), Inżynieria Wysokich Napięć w
Elektroenergetyce, tom I i II, Wydawnictwo Politechniki Poznańskiej, Poznań
1999, 2000.
Gacek Z., Wysokonapięciowa technika izolacyjna, Wydawnictwo Politechniki
Śląskiej, Gliwice 2006.
http://www.youtube.com/watch?v=PwEe2OAFTFY (Jak rysować w programie
Maxwell), dostęp 30.01.2014.
http://www.youtube.com/watch?v=aCGnwOkRF24 (Jak rysować w programie
FEMM), dostęp 30.01.2014 .
COMPARISON OF MAXWELL AND FEMM PROGRAMS
FOR SIMULATION OF ELECTRIC FIELD DISTRIBUTION
The paper shows the differences between two FEM based programs used to plot electric
field distribution. In the first section, the GUI and motivation is presented. In the second
section, project’s variables are shown as well as the results. In the third section both
programs pros and cons are presented.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Piotr FRĄCZAK*
PRĄD UPŁYWNOŚCIOWY POWIERZCHNIOWY
IZOLATORA CERAMICZNEGO PODCZAS EKSPLOATACJI
W UJĘCIU TEORII PERKOLACJI
W pracy przedstawiono obliczenia symulacyjne wartości natężenia prądu
upływnościowego powierzchniowego (pup) izolatora ceramicznego podczas eksploatacji za
pomocą teorii perkolacji. W tym celu stworzono model perkolacji dla węzłów na sieci,
który odzwierciedla powierzchnię izolatora ceramicznego. Model ten jest obwodem
elektrycznym, stanowiącym sieć o strukturze kwadratowej jednakowych rezystorów oraz
napięcie wymuszające. W modelu uwzględniono losowy sposób tworzenia węzłów
,,zapełnionych’’ na sieci za pomocą odpowiednich procedur obliczeniowych programu
PSpice. Obliczenia symulacyjne pup izolatora ceramicznego dokonano za pomocą jego
model perkolacji w programie PSpice.
SŁOWA KLUCZOWE: perkolacja, model perkolacji izolatora, prąd perkolacji izolatora
1.WSTĘP
Powierzchnie
izolatorów
napowietrznych
w
danych
warunkach
eksploatacyjnych pokrywają się warstwą zanieczyszczeń w postaci pyłów
pochodzenia przemysłowego lub morskiego. Osiadające cząsteczki przewodzące
pyłu w sposób losowy na powierzchni izolatora powodują wzrost jego
konduktywności powierzchniowej. Należy dodać, że zanieczyszczenia te na
powierzchni izolatorów w stanie zawilgocenia stwarzają możliwość wystąpienia
przeskoku zabrudzeniowego. Wartość napięcia przeskoku zabrudzeniowego
izolatorów wyznacza się szacunkowo ze wzorów empirycznych dla danej
konduktancji powierzchniowej, określonych gabarytów i napięcia wymuszającego.
Z kolei wartości natężenia prądu upływnościowego powierzchniowego, które
występują podczas przeskoku zabrudzeniowego izolatora można wyznaczyć za
pomocą jego modelu perkolacji (model perkolacji dla węzłów na sieci). Schemat
zastępczy powierzchni izolatora przedstawia się za pomocą obwodu elektrycznego
składającego się ze źródła napięcia oraz z sieci o charakterze rezystancyjnym.
Losowy sposób tworzenia węzłów ,,zapełnionych’’ na sieci można dokonać za
pomocą styczników z programowanym czasem zamykania styków. Styki te są
__________________________________________
* Zachodniopomorskie Centrum Edukacji Morskiej i Politechnicznej w Szczecinie.
150
Piotr Frączak
zestawiane w określonej konfiguracji i zaprogramowane na odpowiednie czasy
zwierania stosownych gałęzi na sieci tworzących węzły ,,zapełnione’’. Obliczenia
symulacyjne prądu upływnościowego powierzchniowego izolatora cylindrycznego
można dokonać na podstawie jego modelu perkolacji.
Celem pracy jest wykonanie obliczeń symulacyjnych wartości natężenia prądu
upływnościowego powierzchniowego izolatora porcelanowego podczas
eksploatacji za pomocą modelu perkolacji w programie PSpice.
2. TEORIA PERKOLACJI DLA WĘZŁÓW NA SIECI
Teoria perkolacji [3] uwzględnia element losowości w modelowaniu
matematycznym. W wyniku, takich operacji matematycznych, uzyskuje się modele
perkolacji, które są naturalnymi modelami układów nieuporządkowanych. Istnieją dwa
rodzaje modeli perkolacji na strukturach sieciowych: model perkolacja dla gałęzi i
model perkolacja dla węzłów. Rozpatrując model perkolacji dla węzłów na sieci
zakłada się, że w sieci występuje komplet gałęzi, a węzły zapełniane są obiektami
kulistymi (plamki przewodzące) w sposób losowy. Węzłowi zajętemu obiektem
kulistym przypisuje się prawdopodobieństwo p (gdzie 0 p 1 ), a brak obiektu w
węźle określa się prawdopodobieństwem (1 p ). Obecność plamki przewodzącej w
węźle sieci oznacza, że wszystkie połączenia (gałęzie) pomiędzy nim a zapełnionymi
węzłami najbliższych sąsiadów (połączone – należą do tego samego klastra) mają
rezystancję
równą
zeru.
Mimo
zwiększania
koncentracji
p
(gdzie 0, 000 p 0,593 ), wartość prądu ( I ( p) 0 ) nie ulega zmianie (wszystkie
powstające klastry mają skończony wymiar, tj. nie istnieje ścieżka przewodząca
między elektrodami), aż do momentu, gdy osiągnięta zostanie krytyczna koncentracja
1
1
zapełnionych węzłów (próg perkolacji - pc , pc 0,593 ), przy której nagle pojawia
się prąd I ( p) 0 . Pojawienie się prądu jest związane z powstaniem
długozasięgowego połączenia (gigantyczny klaster) w obwodzie między elektrodami.
Próg perkolacji jest definiowany wzorem [ 3 ]:
1
m
pc W 1i
i 1
n
W j
(2.1)
j 1
gdzie: W 1i liczba zajętych węzłów sieci, W j liczba wszystkich węzłów
sieci.
W miarę wzrostu liczby zapełnionych węzłów sieci przy odpowiednim
wymuszeniu napięciem pojawia się nagle próg perkolacji (2.1). Jego cechą
charakterystyczną jest nagły wzrost wartości natężenia prądu, który zaczyna dążyć
1
do nieskończoności. Należy dodać, że próg pc w rozpatrywanej teorii perkolacji
odpowiada napięciu przeskoku zabrudzeniowego izolatorów.
Prąd upływnościowy powierzchniowy izolatora ceramicznego …
151
3. OPIS MATEMATYCZNY WYBRANYCH PARAMETRÓW
PRACY IZOLATORA CYLINDRYCZNEGO
Wartość prądu upływnościowego powierzchniowego izolatora cylindrycznego
(rys. 3.1) wyznacza się z równania [1, 2]
Iu =
E π D γs
L
(3.1)
w którym: U – napięcie źródła [kV]; D – średnica izolatora [cm]; γs – przewodność
powierzchniowa zabrudzeń, μS; L – droga upływu [cm].
Rys. 3.1. Schemat zastępczy modelu izolatora cylindrycznego: 1- powierzchnia izolatora,
2- elektroda górna, 3- elektroda dolna, L – droga upływu, D - średnica izolatora
Wartość krytyczną prądu rozpatrywanego izolatora cylindrycznego (rys.3.1)
określa się z równania [2]
1
(3.2)
I = (A π D γ s )1+n
k
gdzie: A i n współczynniki o stałej wartości odpowiednio 100 i 0,7 [2].
Z kolei wartość napięcia przeskoku zabrudzeniowego izolatora ujmuje równanie [2]
1
1
1+n
(3.3)
U pz = L A
(π D γ s ) 1+n
4. OBLICZENIA SYMULACYJNE PUP IZOLATORA
CYLINDRYCZNEGO ZA POMOCĄ MODELU PERKOLACJI
W celu dokonania obliczeń symulacyjnych pup izolatora ceramicznego
utworzono model jego powierzchni za pomocą obwodu elektrycznego. Obwód
elektryczny składa się ze źródła napięcia oraz z sieci o strukturze kwadratowej
jednakowych gałęzi o charakterze rezystancyjnym. Niszcząc w sposób losowy
strukturę sieci modelu powierzchni izolatora otrzymano jego model perkolacji
(perkolacja dla węzłów na sieci).
152
Piotr Frączak
4.1. Rozmiar sieci modelu powierzchni izolatora cylindrycznego
Do budowy modelu perkolacji przyjęto sieć, która posiada 100 oczek (badania
początkowe opracowanego modelu perkolacji). Z kolei rozmieszczenie oczek w
sieci odpowiada gabarytom powierzchni izolatora.
Rozwijając powierzchnię zewnętrzną cylindrycznego izolatora o średnicy 20,00
mm i wysokości 18,00 mm otrzymano prostokąt o wymiarze 20,00 mm × 18,85
mm. Dokonując dyskretyzacji (podziału) powierzchni prostokąta 20,00 mm ×18,85
mm) na kwadraty o wymiarze 2,00 mm × 2,00 mm, otrzymano model powierzchni
izolatora cylindrycznego (rys. 3.1), stanowiący obwód elektryczny utworzony z
sieci o kwadratowej strukturze połączeń rezystorów od R1 do R200, zawierającej 100
oczek, rozmieszczonych w 10 wierszach i 10 kolumnach oraz źródła napięcia
wymuszającego.
4.2. Dobór parametrów powierzchni izolatora cylindrycznego
Do obliczeń symulacyjnych prądu upływnościowego powierzchniowego izolatora
cylindrycznego przyjęto następujące dane: E = 20 kV, D = 6 cm, L = 20 cm, γs = 1 μS.
Wykorzystując te dane za pomocą równania (3.1) obliczono wartość natężenia prądu
(18,85 mA).Znając wartość natężenia prądu upływnościowego powierzchniowego oraz
wartość napięcia wymuszającego za pomocą programu PSpice wyznaczono wartości
parametrów modelu powierzchni izolatora. W modelu tym powierzchnię izolatora
stanowią gałęzie (R1 = R2 =... Rk =...R200, Rk = 3,9106 ).
4.3. Losowy sposób tworzenia węzłów ,,zapełnionych’’ na sieci w programie PSpice
Procedura tworzenia węzłów zapełnionych na sieci modelu powierzchni izolatora
ceramicznego (rys. 4.1) polegała na oznaczeniu węzłów od 1 do 121. W każdym węźle
umieszcza się cztery styczniki oprócz skrajnych (węzły znajdujące się na konturach
zewnętrznych sieci). Węzłom tym w sposób losowy za pomocą procedury rnd(x)
programu Mathcad [5] przyporządkowuje się czasy od 1ms do 121ms.
Te same czasy określone w sposób losowy przypisuje się każdemu stycznikowi
programowalnemu należącemu do danego węzła. Styki normalnie otwarte styczników
programowalnych zestawia się w określone konfiguracje bocznikujące rezystory, które
tworzą węzły ,,zapełnione’’ na sieci z chwilą zamknięcia styków. Szczegółowy opis
procedury tworzenia węzłów zapełnionych na sieci ujmuje rys. 4.2. Do węzła 29
dołączone są cztery styczniki U60, U76, U77 i U91. Tym stycznikom
programowalnym przypisuje się jednakowe czasy zamykania styków
(zaprogramowane - uzyskane w sposób losowy): (tClose = 78 ms)≡ s1, (tClose = 78
ms) ≡ s2, (tClose = 78 m)≡ s3 i (tClose = 78 m) ≡ s4. Węzeł 29 łączy się z najbliższymi
węzłami 28, 18, 30 i 40 poprzez rezystory odpowiednio R38, R28, R39 i R49.
Prąd upływnościowy powierzchniowy izolatora ceramicznego …
…
:
:
…
Rys. 4.1. Schemat zastępczy modelu perkolacji powierzchni izolatora ceramicznego
w programie PSpice
Rys. 4.2. Węzły 29, 28, 18 ,30 i 40 sieci modelu perkolacji (rys. 4.1)
153
154
Piotr Frączak
Rezystory te są zbocznikowane dwoma szeregowo połączonymi stykami
odpowiednich styczników (U76 – U75, U60 – U49, U77 – U78, U91 – U102). Z kolei
w toku obliczeń symulacyjnych (np., t = 119 ms) styczniki U18, U34, U35 i U49 w
węźle 18 zamykają swoje styki normalnie otwartymi (tClose = 119 ms) ≡ s5, (tClose =
119 ms) ≡ s6, (tClose = 119ms ) ≡ s7 i (tClose = 119ms) ≡ s8. W wyniku zamknięcia
styków s1(t1) i s8(t2) odpowiednio przekaźników U60 i U49, rezystor R28 zostaje
zbocznikowany. Wartość rezystancji zbocznikowanego rezystora jest równa zeru.
Operację losowego tworzenia węzłów ,,zapełnionych’’ na sieci przebiega do czasu t =
121 ms, aż wszystkie węzły zostaną ,,zapełnione’’
4.4. Obliczenia symulacyjne pup izolatora cylindrycznego w programie PSpice
Procedura obliczeniowa polegała na stworzeniu schematu zastępczego modelu
perkolacji powierzchni izolatora ceramicznego, zadeklarowania odpowiednich
nastaw procedury Transient Analysis ( Print Step = 0.5 ms; Final Time = 121 ms;
No – Print Deley = 0; Step Celling = 0.5 ms; Skip initial transient solution).
Natomiast wartości nastaw czasowych poszczególnych styczników (Sw tClose
=…ms) podane na schemacie zastępczym modelu perkolacji powierzchni izolatora
ceramicznego (rys. 4.1). Wyniki obliczeń symulacyjnych prądu upływnościowego
powierzchniowego izolatora ceramicznego za pomocą modelu perkolacji
umieszczono na rys. 4.3 i rys. 4.4.
Rys. 4.3. Obliczenia symulacyjne prądu upływnościowego powierzchniowego izolatora ceramicznego
za pomocą modelu perkolacji w programie PSpice – przed wystąpienia progu perkolacji
Prąd upływnościowy powierzchniowy izolatora ceramicznego …
155
Rys. 4.4. Obliczenia symulacyjne prądu upływnościowego powierzchniowego izolatora ceramicznego
za pomocą modelu perkolacji w programie PSpice – wystąpienie progu perkolacji
5. WNIOSKI
W wyniku przeprowadzonych obliczeń symulacyjnych pup izolatora
cylindrycznego za pomocą modelu perkolacji (model perkolacji dla węzłów na
sieci) stwierdzono:
Utworzony model perkolacji zweryfikowano na podstawie wartości progu
1
( pc = 0,5998 ).
Podczas tworzenia modeli perkolacji na sieciach izolatorów ceramicznych
należy radykalnie zwiększyć liczbę węzłów.
Teorię perkolacji (perkolacja dla węzłów na sieci) można zastosować do
wyznaczenia wartości natężenia prądu upływnościowego powierzchniowego
izolatorów ceramicznych.
Na otrzymanych charakterystykach symulacyjnych prądu upływnościowego w
funkcji liczby zapełnionych węzłów widać stopniowe narastanie wartości
natężenia prądu i nagły wzrost o kilka rzędów wielkości (próg perkolacji).
1
Próg pc (perkolacja dla węzłów na sieci) w rozpatrywanym modelu perkolacji
izolatora odpowiada jego napięciu przeskoku zabrudzeniowego.
LITERATURA
[1] Chrzan K.L.: Prąd upływu na naturalnie zabrudzonych izolatorach porcelanowych i
silikonowych, Przegląd Elektrotechniczny 2008, vol. 84, nr 10, s.117–120.
[2] Flisowski Z.: Technika wysokich napięć, wyd. 5, Warszawa, WNT 2005, ISBN 83204-3077-1.
[3] Zallen R.: Fizyka ciał amorficznych, Warszawa, WN PWN 1994, ISBN 83-01-11265-4.
[4] Król A., Moczko J.: PSpice Symulacja i optymalizacja układów elektronicznych,
Wydawnictwo Nakom, Poznań 1999, ISBN 83 - 86969-28-8.
[5] Palczewski W.: Mathcad 12,11, 2001i, 2000 w algorytmach, Akademicka Oficyna
Wydawnicza EXIT, Warszawa 2005, ISBN 83-87674-81-8.
156
Piotr Frączak
THE SURFACE LEAKAGE CURRENT OF THE CERAMIC INSULATOR
DURING OPERATION IN THE PERCOLATION THEORY
The paper presents simulation calculations, using percolation theory, of the intensity of
surface leakage current (pup) of the ceramic insulator during operation. For this purpose a
percolation model for network nodes was created. The model reflects the surface of the
ceramic insulator. This model is an electric circuit which constitutes a network of square
structure equal resistors and a forcing voltage. The model includes a random way to create
nodes “filled” on the network using the appropriate calculation procedures of the PSpice
software. The developed model of percolation for the nodes on the network reflects the
process of deposition of conductive particles of dust on the surface of the insulator, which
causes an increase in its surface conductivity. Calculations verifying the pup of the ceramic
insulator were made analytical using appropriate empirical formulas that recognize its size,
surface conductance and voltage forcing in the Mathcad software. The verifying
calculations include the phenomenon of checking jump of the insulator.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Filip POLAK*
Wojciech SIKORSKI*
Krzysztof SIODŁA*
LOKALIZACJA ŹRÓDEŁ WYŁADOWAŃ NIEZUPEŁNYCH
PRZY UŻYCIU MATRYCY PRZETWORNIKÓW
Artykuł dotyczy problematyki lokalizacji źródeł wyładowań niezupełnych (wnz) przy
użyciu techniki matryc przetworników emisji akustycznej oraz wysokorozdzielczej techniki
estymacji kierunku nadejścia sygnału. W pracy, oprócz założeń teoretycznych obu technik,
przedstawiono wyniki symulacji, w których do rejestracji sygnałów emisji akustycznej
generowanych przez defekty układu izolacyjnego transformatora energetycznego, zastosowano
liniową matrycę przetworników (ang. ULA – Uniform Linear Array). Z kolei do estymacji
kierunku nadejścia sygnałów akustycznych, które propagują się od defektu generującego
wyładowania do zainstalowanej na kadzi transformatora matrycy przetworników, wybrano
algorytm Multiple Signal Classification (MUSIC). Dzięki możliwości lokalizacji wyładowań
wieloźródłowych (nawet przy bardzo niskim stosunku sygnału użytecznego od szumu),
przyjęte rozwiązanie wykazuje przewagę nad technikami konwencjonalnymi.
SŁOWA KLUCZOWE: wyładowania niezupełne, lokalizacja źródeł sygnałów, matryca
przetworników, estymacja kierunku nadejścia sygnału (DOA), algorytm Multiple Signal
Classification
1. WPROWADZENIE
Defekty wysokonapięciowego układu izolacyjnego stanowiące źródło
wyładowań niezupełnych (wnz), są jedną z głównych przyczyn awarii dużych
transformatorów energetycznych. Problematyka dotycząca detekcji, identyfikacji i
lokalizacji źródeł wnz stanowi obecnie przedmiot szeroko prowadzonych prac
badawczych [1-6]. Ich celem jest, m.in. rozwój i poprawa wiarygodności aktualnie
stosowanych technik diagnostyki i monitoringu transformatorów energetycznych
opartych na detekcji zjawiska wnz, z których główne to: konwencjonalna metoda
elektryczna (PN-EN 60270), metody elektromagnetyczne (HF/VHF/UHF), metoda
emisji akustycznej (EA) i metoda gazów rozpuszczonych w oleju (DGA). Prace
badawcze autorów niniejszego artykułu koncentrują się obecnie na poszukiwaniu
nowych rozwiązań teoretycznych i technologicznych, które pozwoliłyby wydatnie
poprawić dokładność lokalizacji defektów wysokonapięciowego układu
__________________________________________
* Politechnika Poznańska.
158
Filip Polak, Wojciech Sikorski, Krzysztof Siodła
izolacyjnego. Jedna ze ścieżek badawczych dotyczy możliwości zastosowania
techniki matryc przetworników do oszacowania kierunku nadejścia sygnału (ang.
DOA ̶ Direction-of-Arrival Estimation) generowanego przez wnz. Genezą podjęcia
prac nad tym zagadnieniem jest fakt, że popularne techniki lokalizacji
(standardowa i zaawansowana technika osłuchowa oraz technika triangulacyjna),
w niektórych, trudnych z metrologicznego punktu widzenia przypadkach, tj. przy
występowaniu wielu źródeł wnz, czy rejestrowaniu silnie zaszumionych sygnałów
EA, nie pozwalają z oczekiwaną dokładnością wyznaczyć współrzędnych XYZ
defektu. Z kolei technologia matryc przetworników (ang. Sensor Array), wsparta
dodatkowo najnowszymi, wysokorozdzielczymi algorytmami estymacji kierunku
nadejścia sygnału (MUSIC, Root-MUSIC, ESPRIT, Min-Norm itp.) jest,
przynajmniej teoretycznie, pozbawiona wad i ograniczeń wspomnianych
wcześniej technik konwencjonalnych [7].
W dalszej części artykułu omówiono teoretyczne podstawy zastosowania
liniowej matrycy przetworników emisji akustycznej i algorytmu MUSIC do
lokalizacji źródeł wyładowań niezupełnych.
2. LINIOWA MATRYCA PRZETWORNIKÓW – MODEL DANYCH
Rozważmy liniową matrycę odbiorczą (ang. ULA – Uniform Linear Array)
składającą się z M identycznych, równo od siebie oddalonych i ulokowanych
wzdłuż jednej linii, przetworników pomiarowych. Odległość pomiędzy
sąsiadującymi przetwornikami wynosi Δ, zaś odległość od defektu (źródła sygnału)
do pierwszego przetwornika matrycy odbiorczej (patrząc od prawej) wynosi dd.
Z kolei sygnał generowany przez źródło zdefiniujmy jako [8]:
s ir ( t ) i (t ) cos[2f c t i ( t )]
(1)
1 i d
gdzie i(t) amplituda sygnału, fc – częstotliwość dominująca sygnału, i(t) –
przesunięcie fazowe, d – liczba źródeł sygnałów.
Dodatkowo załóżmy, że sygnały te mają charakter wąskopasmowy. Oznacza to,
że amplitudy i(t) i fazy i(t) zmieniają się powoli w odniesieniu do , który jest
czasem, w którym fala propaguje się między jednym a kolejnym przetwornikiem
(rys. 1). Możemy zatem zapisać, że:
i ( t ) i ( t )
i ( t ) i ( t )
(2)
Wolne zmiany wartości amplitudy i(t) i fazy i(t) gwarantują wtedy, że
większość składowych częstotliwościowych w transformacie Fouriera z (1) jest w
bliskim sąsiedztwie składowej dominującej fc. Zależność (1) można również
przedstawić w postaci obwiedni zespolonej (ang. complex envelope), lub w postaci
Lokalizacja źródeł wyładowań niezupełnych przy użyciu matrycy …
tzw. fazora (wskazu), czyli z pominięciem pulsacji: s env
i (t ) i ( t )e
r
i
env
i
s ( t ) Re{s ( t )e
j 2 f c t
j i ( t )
159
, takiej że
}.
Rys. 1. Scenariusz rozpatrywany w artykule
Załóżmy teraz, że fala płaska generowana przez źródło dociera do matrycy
przetworników z prędkością v i pod kątem θi (rys. 2).
Rys. 2. Model danych estymacji kierunku nadejścia sygnału za pomocą M-elementowej liniowej
matrycy przetworników
Sygnał pokonując drogę dd dociera w pierwszej kolejności do przetwornika
dd
. Możemy zatem zapisać, że:
s i1 ( t ) sir ( t d ) i ( t d ) cos[2f c ( t d ) i (t t d )]
znajdującego się najbliżej źródła po czasie d
Re{ i (t d )e j[ 2f c t i ( t d ) 2f c d ]}
(3)
160
Filip Polak, Wojciech Sikorski, Krzysztof Siodła
Ponieważ wszystkie przetworniki matrycy odbiorczej ulokowane są wzdłuż
jednej linii, to sygnał docierający do m-tego przetwornika pokonuje, w porównaniu
do sygnału docierającego do skrajnego prawego (pierwszego) przetwornika,
pewien dodatkowy dystans, który można wyznaczyć z następującej zależności:
mi (m 1) sin i ,
(4)
m = 1,2,…,M
W związku z tym przyjmujemy, że sygnał dotrze do m-tego przetwornika z
opóźnieniem mi:
mi
mi (m 1)( sin i )
(5)
Dlatego też, sygnał zarejestrowany przez m-ty przetwornik możemy
zdefiniować jako opóźnioną wersję sygnału si1(t) (rejestrowanego przez pierwszy,
skrajnie prawy przetwornik) z dodatkowym opóźnieniem mi:
s im ( t ) s i1 ( t mi ) s ir ( t d mi )
i (t d mi ) cos[2f c (t d mi ) ( t d mi )]
i ( t d ) cos[2f c ( t d ) (t t d ) (m 1)i ]
Re[s i (t )e j( m 1) i ]
(6)
2f c
2
gdzie i
sin i sin i jest częstotliwością przestrzenną (ang.
spatial frequency), która jest powiązana z i-tym źródłem, generującym sygnał pod
kątem padania i ;
oznacza długość fali o częstotliwości dominującej fc.
fc
Przy wyznaczaniu równania (6) uwzględniana jest aproksymacja (2). Wtedy
zależność na sim(t) w postaci zespolonej przyjmuje następującą postać:
s im ( t ) i ( t d )e j[ 2 f c ( t d ) i ( t )]e j( m 1) i s i ( t )e j( m 1) i
(7)
Równanie (7) pokazuje, że sygnał sim(t) zarejestrowany przez m-ty przetwornik,
który został wygenerowany przez i-te źródło, jest identyczny jak sygnał si1(t)
zarejestrowany przez pierwszy (skrajnie prawy) przetwornik, ale z dodatkowym
współczynnikiem przesunięcia fazowego ej(m-1)i. Wartość tego współczynnika
zależy wyłącznie od częstotliwości przestrzennej i i od położenia danego
przetwornika względem pierwszego. Każdemu kątowi padania sygnału i
odpowiada częstotliwość przestrzenna i. Dlatego, przy estymacji kierunku
nadejścia sygnału, podstawowym celem jest wyodrębnienie częstotliwości
przestrzennej i z zarejestrowanych przez matrycę przetworników sygnałów.
Należy przy tym spełnić warunek o minimalnej odległości pomiędzy
przetwornikami , która powinna być mniejsza lub równa połowie długości
falowej .
Lokalizacja źródeł wyładowań niezupełnych przy użyciu matrycy …
161
Rozważmy teraz sytuację, w której wszystkie sygnały si(t) generowane przez dźródeł oraz szumy nm(t) rejestrowane przez m-ty przetwornik w chwili czasowej t,
możemy przedstawić za pomocą następujących zależności:
d
d
x m (t ) si ( t ) n m ( t ) si ( t )e j( m 1) i n m ( t )
i 1
i 1
d
si ( t ) e
j ( m 1) i
n m (t)
(8)
m 1,2,..., M
i 1
W formie macierzowej zależność (8) można przedstawić jako:
s1 ( t )
s ( t )
2
n ( t ) As( t ) n (t )
x (t ) [a (1 ), a ( 2 )...a (d )]
...
s d ( t )
(9)
gdzie x(t) = [x1(t) x2(t) … xM(t)]T to dane zarejestrowane przez M-elementową
matrycę przetworników, s(t) = [s1(t) s2(t) … sM(t)]T to sygnał generowany przez
źródła, n(t) = [n1(t) n2(t) … nM(t)]T to biały szum Gaussowski o zerowej średniej.
Tablica wektorów sterujących (częstotliwości przestrzenne ito niewiadome)
jest definiowana jako:
a (i ) [1e j i e j2 i ...e j( M 1) i ]T
(10)
W postaci macierzowej (macierz o rozmiarze M d) możemy wtedy zapisać, że:
1
e j1
A
...
j( M 1) 1
e
1
j 2
e
...
e j( M 1) 2
...
1
j1d
...
e
...
...
... e j( M 1) d
(11)
3. ESTYMACJA KIERUNKU NADEJŚCIA SYGNAŁU METODĄ
MULTIPLE SIGNAL CLASSIFICATION (MUSIC)
Metoda MUSIC (ang. Multiple Signal Classification) to jedna z najszerzej
stosowanych, wysokorozdzielczych technik estymacji kierunku nadejścia sygnału.
Należy ona do grupy metod podprzestrzeni (ang. subspace methods), a działanie jej
algorytmu można najkrócej przedstawić w następujących krokach:
Krok 1: Zarejestruj sygnały wejściowe x(tn) n = 1,2,…,N i dokonaj estymacji
macierzy kowariancji:
1 N
R xx R xx x ( t n ) x H ( t n )
N n 1
(12)
162
Filip Polak, Wojciech Sikorski, Krzysztof Siodła
Krok 2: Wykonaj dekompozycję macierzy kowariancji R xx względem wartości
własnych
R xx V V
(13)
gdzie diag{1 , 2 ,..., M } , 1 2 … M są wartościami własnymi, a
zawiera wszystkie wektory własne R xx .
Krok 3: Dokonaj estymacji wielokrotności k najmniejszej wartości min oraz
liczby źródeł sygnałów d według zależności:
(14)
dMk
Krok 4: Wyznacz widmo częstotliwościowe MUSIC:
P() PMUSIC ()
1
a ()Vn VnH a ()
H
(15)
gdzie Vn = [qd+1, …, qM] z ql, l = d+1, d+2 ,..., M będącymi wektorami
własnymi odpowiadającymi najmniejszej wartości własnej min .
Krok 5: Znajdź d wartości szczytowych w widmie PMUSIV(), które odpowiadają
wartościom kątów (kierunków) nadejścia sygnałów.
4. LOKALIZACJA ŹRÓDEŁ WNZ W TRANSFORMATORZE
ENERGETYCZNYM – WYNIKI SYMULACJI
Wyładowania niezupełne, w zależności od typu defektu i układu izolacyjnego,
emitują fale emisji akustycznej o częstotliwościach zawierających się w zakresie
od 30 kHz do ok. 600 kHz. W przeprowadzonych symulacjach, sygnał EA
modelowano w postaci kombinacji funkcji sinusoidalnej i wykładniczej:
5
0,5e ( 210 ( t 0 t )) sin( 2ft )
f (t)
4
0,5e ( 10 ( t t 0 )) sin( 2ft )
0 tt
t 0 t t1
gdzie :
t 0 0,001s
t 1 0,0041s
(16)
o częstotliwości 110 kHz. Wybór tej wartości podyktowany był faktem, iż jest to
częstotliwość dominująca dla impulsów wyładowań powierzchniowych
(rejestrowanych przetwornikiem typu PAC WD) o dominującej stałej normalnej
pola elektrycznego i wysokoenergetycznych iskier ślizgowych, które stanowią
największe zagrożenie dla papierowo-olejowego układu izolacyjnego
transformatora [6]. Dodatkowo, aby w symulacji jak najdokładniej odzwierciedlić
trudne warunki pomiarowe panujące na stacji energetycznej (wysoki poziom
szumów i szerokopasmowych zakłóceń), do niezaszumionych sygnałów
harmonicznych dodawano biały szum gaussowski. Tak zamodelowane sygnały
charakteryzowały się stosunkowo niską wartością współczynnika SNR (ang.
Signal-to-Noise Ratio), od -11,3 do -14,8 dB, która określa stosunek sygnału
użytecznego do szumu (rys. 3).
Lokalizacja źródeł wyładowań niezupełnych przy użyciu matrycy …
Sygnał "czysty" (SNR -> +Inf)
Sygnał "zaszumiony" (SNR = -14,8 dB)
0.5
Amplituda [V]
0.5
Amplituda [V]
163
0
-0.5
0
-0.5
0
1
2
Czas [s]
3
4
-3
x 10
0
1
2
Czas [s]
3
4
-3
x 10
Rys. 3. Przykładowe przebiegi czasowe zamodelowanych sygnałów EA (niezaszumionych
i zaszumionych) generowanych przez wyładowania niezupełne typu powierzchniowego
Do rejestracji sygnałów użyto matematycznego modelu liniowej matrycy
sensorów (ang. ULA – Uniform Linear Array) składającej się z czterech
przetworników, o parametrach odpowiadających popularnym, szerokopasmowym
przetwornikom piezoelektrycznym typu PAC WD (pasmo przenoszenia: 100-1000
kHz; częstotliwości rezonansowe: 125 kHz, 200 kHz, 280 kHz, 420 kHz, 530 kHz,
kierunkowość: ±1,5 dB) [6]. Aby spełnić warunek o minimalnej dopuszczalnej
odległości pomiędzy przetwornikami, która powinna być mniejsza lub równa
połowie długości falowej , przyjęto, że są one rozmieszczone w odstępach
wynoszących 5 mm.
Należy podkreślić, że przy pomocy matryc liniowych możliwe jest
wyznaczenie jedynie azymutu (kąt θ). W celu oszacowania kierunku nadejścia
sygnału w układzie trójwymiarowym, konieczna jest jeszcze znajomość kąta
elewacji. Możliwe jest to wyłącznie poprzez zastosowanie co najmniej
dwuwymiarowej matrycy przetworników (np. kołowej lub prostokątnej).
Dlatego w przeprowadzonych symulacjach przyjęto uproszczenie, że źródło
sygnału emisji akustycznej generowanego przez wnz znajduje się na tej samej
wysokości co matryce przetworników. W efekcie tego założenia pominięto
współrzędną Z, czyli współrzędną trzeciego wymiaru (rys. 4).
Jako obiekt badań zamodelowano kadź transformatora energetycznego o długości
x = 6 m i szerokości y = 3 m. Przyjęto, że punkt o współrzędnych [0,0] położony jest
w lewym dolnym rogu. Aby wyznaczyć współrzędne XY defektu, należy umieścić
matrycę przetworników w co najmniej dwóch różnych miejscach kadzi (w efekcie
tego otrzymamy co najmniej dwa różne kąty nadejścia sygnału). Następnie wystarczy
poprowadzić półproste (pod wyznaczonym kątem nadejścia sygnału) od punktów
wyznaczających środek matryc przetworników. Wtedy współrzędne punktu przecięcia
się tych półprostych definiują nam położenie defektu.
W przypadku wykonanych symulacji, matryce przetworników zostały
umieszczone na osi OX (przednia ściana kadzi transformatora) w odległości
dwóch i czterech metrów od początku układu współrzędnych (rys. 4).
164
Filip Polak, Wojciech Sikorski, Krzysztof Siodła
Rys. 4. Schemat modelu kadzi transformatora energetycznego (rzut z góry) z zaznaczonymi
miejscami rozmieszczenia matryc przetworników i sposobem oznaczania kąta θ nadejścia sygnału
Przyjęty w symulacji scenariusz zakładał dwa przypadki. W pierwszym
przypadku (oznaczonym jako A) sygnał EA generowany był przez źródło o
współrzędnych x = 5,5 m i y = 2,5 m, zaś w drugim przypadku (B) źródło
położone było w punkcie o współrzędnych x = 2,5 m i y = 1 m (rys. 5).
a)
b)
c)
Rys. 5. Symulacja lokalizacji źródeł wnz przy użyciu liniowej macierzy przetworników EA:
a) miejsca położenia defektów (przypadek A i B), b) przykładowy wynik lokalizacji dla sygnału
niezaszumionego (SNR→∞), c) przykładowy wynik lokalizacji dla sygnału silnie zaszumionego
(SNR = -14 dB)
Wyniki przeprowadzonych symulacji wykazały, że dzięki zastosowaniu
wysokorozdzielczego algorytmu MUSIC, błąd lokalizacji współrzędnych źródła
wyładowań niezupełnych jest pomijalnie mały. W przypadku silnie zaszumionych
sygnałów średni błąd oszacowania położenia defektu wyniósł zaledwie 5,5 cm w
osi OX i 5,2 cm w osi OY.
Lokalizacja źródeł wyładowań niezupełnych przy użyciu matrycy …
165
Rys. 6. Błędy lokalizacji źródła wnz (podane w [cm]) naniesione na układ współrzędnych (punkt
o współrzędnych [0,0] stanowi w tym przypadku punkt odniesienia – miejsce lokalizacji defektu)
5. PODSUMOWANIE
W artykule przedstawiono wyniki rekonesansowych prac badawczych
dotyczących określenia możliwości zastosowania matrycy przetworników emisji
akustycznej i algorytmu wysokorozdzielczej estymacji kierunku nadejścia sygnału
(MUSIC) do lokalizacji źródeł wyładowań niezupełnych w transformatorach
energetycznych. Uzyskane wyniki symulacji pozwalają sądzić, że proponowana
przez autorów metoda może stanowić korzystną alternatywę dla klasycznej
techniki triangulacyjnej (szczególnie, w przypadku, gdy rejestrowane sygnały są
silnie zaszumione, lub gdy pochodzą one z różnych źródeł). Kolejny etap
zaplanowanych prac badawczych będzie obejmował zaprojektowanie i wykonanie
dwuwymiarowej matrycy przetworników EA oraz wykonanie badań
laboratoryjnych na rzeczywistym modelu kadzi transformatora.
LITERATURA
[1] Sinaga H.H., Phung B.T., Blackburn T.R., Recognition of single and multiple partial
discharge sources in transformers based on ultra-high frequency signals, IET
Generation, Transmission & Distribution, vol. 8, pp. 160-169, 2014.
[2] Youchen Wang, Chaojie Zhu, Qiaohua Wang, Zhihao Wang, Yi Yin, Processing of
partial discharge ultra-high frequency signals from a true size transformer, IEEE
International Conference on Solid Dielectrics (ICSD), pp. 1012-1015, 2013.
[3] Ahmed M.R., Geliel M.A., Khalil A., Power transformer fault diagnosis using fuzzy
logic technique based on dissolved gas analysis, 21st Mediterranean Conference on
Control & Automation (MED) ‘2013, pp. 584-589, 2013.
166
Filip Polak, Wojciech Sikorski, Krzysztof Siodła
[4] Markalous S., Tenbohlen S., Feser K., Detection and location of partial discharges in
power transformers using acoustic and electromagnetic signals, IEEE Transactions on
Dielectrics and Electrical Insulation, vol. 15, pp. 1576-1583, 2008.
[5] Sikorski W., Siodla K., Moranda H., Ziomek W., Location of partial discharge
sources in power transformers based on advanced auscultatory technique, IEEE
Transactions on Dielectrics and Electrical Insulation, vol. 19, pp. 1948-1956, 2012.
[6] Sikorski W., Ziomek W., Detection, Recognition and Location of Partial Discharge
Sources Using Acoustic Emission Method (Chapter 3), Acoustic Emission, InTECH
Publisher, ISBN 978-953-51-0056-0, 2012.
[7] Yan-Qing Li, Qing Xie, Nan Wang, Xin Xiang, Fang-Cheng Lu, Simulation of PD
location in power transformer based on Root Multiple Signal Classification method,
IEEE 9th International Conference on the Properties and Applications of Dielectric
Materials ICPADM 2009, pp. 553-556, 2009.
[8] Zhizhang Chen, Gopal Gokeda, Yiqiang Yu, Introduction to Direction-of-Arrival
Estimation, Artech House, ISBN 978-1-59693-089-6 2003.
PARTIAL DISCHARGE SOURCE LOCALIZATION USING SENSOR ARRAY
This paper concerns the issue of partial discharges (PD) sources location using acoustic
emission transducer arrays technique and the high resolution direction of arrival estimation
technology. In addition to the theoretical assumptions of both techniques, the simulation
result, in which an uniform linear array (ULA) was used for registration of the acoustic
emission signals generated by defects in power transformer insulation system, were shown.
To estimate the direction of arrival (DOA) of acoustic signals, that propagate from the
discharge-generating defect to the transducer array installed on transformer tank, Multiple
Signal Classification (MUSIC) algorithm was chosen. With the ability to locate multisource
discharges (even at very low signal to noise ratio SNR), the adopted solution has
advantages over conventional techniques.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Jerzy JANISZEWSKI*
Andrzej KSIĄŻKIEWICZ*
BADANIA MODELOWE REZYSTANCJI ZESTYKOWEJ
ŁĄCZNIKÓW PRÓŻNIOWYCH
Rezystancja przejścia połączonych elektrod, w tym w szczególności zestyków łączników
elektroenergetycznych, jest podstawowym parametrem determinującym ich obciążalność
prądową znamionową (w warunkach pracy długotrwałej) oraz graniczną obciążalność
zwarciową (powyżej której zestyki ulegają sczepieniu). W pracy przedstawiono wyniki
obliczeń symulacyjnych wartości rezystancji przejścia wybranych typów zestyków,
wykonane dla różnych modeli matematycznych oraz ocenę stopnia ich zgodności z
wynikami badań obiektów rzeczywistych.
SŁOWA KLUCZOWE: zestyki, rezystancja zestykowa, materiały stykowe
1. WPROWADZENIE
Fragment toru prądowego, zawierający miejsce styczności dwóch przewodników,
nazywany jest zestykiem, przy czym ze względu na rodzaj pracy może to być element
rozłączny lub nierozłączny. Zestyki rozłączne stanowią główny podzespół
funkcjonalny stykowych łączników elektroenergetycznych, umożliwiający załączanie i
wyłączanie obwodów prądowych. Z tego powodu nazywa się je także zestykami
łączeniowymi. Ze względu na kształt obszaru przylegania do siebie pary styków
tworzących zestyk wyróżnia się zazwyczaj formy wyidealizowane w postaci zestyku
punktowego, liniowego lub powierzchniowego [1]. W praktyce za zestyk punktowy
uznaje się konfigurację przylegania styków, w której powierzchnia styczności jest
zbliżona do koła o bardzo małym promieniu. Ze względów technologicznych
topografia powierzchni stykowych posiada zawsze mikrowzniesienia i
mikrozagłębienia (chropowatość), tak więc w przypadku zestyków liniowych i
powierzchniowych rzeczywiste powierzchnie ich przylegania są sumą powierzchni
elementarnych zestyków punktowych. Układają się one odpowiednio albo w formie
zbliżonej do odcinka (zestyk liniowy), albo z losowym rozkładem rozmieszczone są na
pozornej (wynikającej z geometrii zestyku) powierzchni przylegania. Wielkość
rzeczywistej (całkowitej) powierzchni styczności stanowi zaledwie kilka procent
powierzchni pozornej i w znacznej mierze zależna jest od twardości materiału styków
oraz sposobu i dokładności ich wykonania.
__________________________________________
* Politechnika Poznańska.
168
Jerzy Janiszewski, Andrzej Książkiewicz
Istnienie w strefie przylegania styków obszarów styczności o elementarnych
powierzchniach wielokrotnie mniejszych od powierzchni pozornej zestyku powoduje
lokalne zmniejszenie przekroju przewodnika dla przepływającego prądu, a więc
lokalny wzrost jego gęstości. W ujęciu makroskopowym oznacza to powstanie w
torze prądowym dodatkowej rezystancji, związanej z przewężeniem jego przekroju,
którą określa się jako tzw. rezystancję przewężenia lub rezystancję kształtu. Istotę
modelowego ujęcia rezystancji przewężenia przedstawiono na rysunku 1.
Rys. 1. Model struktury powierzchni styczności zestyku płaskiego
Rzeczywista (całkowita) rezystancja zestyku, nazywana także rezystancją przejścia
jest w rzeczywistości większa, ponieważ na powierzchniach materiałów stykowych
adsorbowane są cząsteczki gazowe oraz łatwo tworzą się warstwy nalotowe. Ich
znaczenie może być mniej istotne lub nawet pomijalne w przypadku zestyków
łączników próżniowych. O ile jednak w środowisku próżniowym lub w otoczeniu
gazów nieaktywnych warstwy nalotowe mogą się nie tworzyć, o tyle warstwa
adsorpcyjna występuje zawsze. Podsumowując, rezystancja przejścia zestyków jest
sumą rezystancji przewężenia oraz rezystancji niemetalicznych warstw
powierzchniowych [2, 3]. Ocena jej wartości, odniesiona do wartości rezystancji
minimalnej (wyznaczonej dla ekwiwalentnych, czystych i nieznacznie
zdeformowanych powierzchni stykowych) powinna stanowić ważny wskaźnik stanu
technicznego zestyków łączników znajdujących się w eksploatacji.
2. REZYSTANCJA ZESTYKOWA W UJĘCIU ANALITYCZNYM
Styki tworzące zestyk łączeniowy dociśnięte są do siebie przez mechanizm
łącznika, wskutek czego mikropowierzchnie przylegania (Rys.1) podlegają
odkształceniom sprężystym (przy małych siłach docisku) lub plastycznym (przy
siłach dużych, powodujących przekroczenie granicy plastyczności materiału
stykowego). W przypadku dużych sił ściskających, wytrzymałość na zgniatanie
poszczególnych mikrowzniesień okazuje się być mniejsza niż wynikająca wprost z
Badania modelowe rezystancji zestykowej łączników próżniowych
169
twardości materiałów (określonych np. metodami Brinella lub Vickersa). Ze
wzrostem docisku styków, wskutek spłaszczania początkowych miejsc styczności,
wzrasta nie tylko rzeczywista powierzchnia ich przylegania, ale także pojawiają się
kolejne punkty połączeń międzyelektrodowych. Wymiary i liczba punktów
styczności są więc nieliniowymi funkcjami siły zgniatającej, można je jednak
ocenić na podstawie zależności [2, 4]:
n 2,5 10 5 H 0 ,625 F 0, 2
(1)
w której: n – liczba punktów styczności, H – twardość materiału stykowego (wg
Brinella lub Vickersa, N/m2), F – siła docisku styków, N,
oraz:
F
r
(2)
nH
w której: r – promień (uśredniony) punktu styczności, m, ξ – współczynnik
empiryczny o wartości 0,3-0,6 [4].
Przykładową zależność liczby punktów styczności i ich średniego promienia od
siły docisku styków, wykonanych ze srebra i wolframu, przedstawia rysunek 2.
Rys. 2. Zależność liczby i wielkości (promienia) punktów styczności w funkcji siły docisku styków
dla przykładowych materiałów o znacznie zróżnicowanej twardości
Materiały stykowe, stosowane w łącznikach elektroenergetycznych, muszą
spełniać wiele (często wzajemnie sprzecznych) wymagań użytkowych, z których
najważniejszymi są: dobra przewodność elektryczna i cieplna oraz wysoka
odporność na erozyjne działanie łuku elektrycznego. W aktualnie produkowanych
łącznikach próżniowych są to zazwyczaj spieki i stopy srebra lub miedzi z
wolframem (w stycznikach) oraz miedzi i chromu (w wyłącznikach).
Gdyby rezystancja przejścia zależała wyłącznie od liczby punktów styczności w
zestyku, to zgodnie z rysunkiem 2, do wykonania nakładek stykowych korzystnie
byłoby stosować materiały twarde. Niestety punkty styczności mają wówczas
niewielkie wymiary. Dodatkowo na rezystancję zestykową wpływa także
170
Jerzy Janiszewski, Andrzej Książkiewicz
rezystywność materiału stykowego i rezystancja warstw powierzchniowych, tak
więc w konsekwencji:
R Rk R p
(3)
gdzie Rn są odpowiednio rezystancjami: R – zestykową, Rk – kształtu, Rp – warstw
powierzchniowych.
Rezystancję zestykową opisuje zależność [4]:
p
R
(4)
2na na 2
w której: ρ – rezystywność materiału stykowego, Ω·m, ρp – rezystywność warstw
powierzchniowych, Ω·m2.
Przy założeniu, że warstwy powierzchniowe w komorze próżniowej można
zaniedbać, po uwzględnieniu zależności (1) i (2):
R
H 0 ,1875 F 0 ,6
(5)
2 2,5 10 5
Wychodząc z zależności opracowanych przez Holma [1], w pracy [5]
przedstawiono zależność opisującą rezystancję styków płaskich, poddanych
działaniu sił ściskających, powodujących odkształcenia plastyczne:
R
(6)
2n F
w której: σ – naprężenia odkształceń plastycznych materiału styków, N/m2.
Na prostą postać wzoru opisującego rezystancję zestyków wykonanych m.in. z
różnych materiałów wskazuje Rachowski [3]:
H
R 1 2
(7)
2
F
gdzie ρ1 i ρ2 są rezystywnościami poszczególnych materiałów, natomiast H jest
twardością styku bardziej miękkiego.
Prostą interpretacyjnie formułę, ale ograniczoną do bardzo skromnego zestawu
metali (w zasadzie niewykorzystywanych obecnie w konstrukcjach zestyków)
przedstawiają prace [6 ] i [7]:
c
R
(8)
(0,1F ) m
przy czym nieliczne wartości dla parametrów (c·ρ) i (m) zamieszczono w [5, 6, 7].
Przykładowe wartości rezystancji zestykowej, wyznaczone dla zestyku
miedzianego (Cu-Cu) przedstawia rysunek 3.
Z uwagi na ograniczenia zakresu stosowalności i dostępności danych dla części
z wykorzystanych wcześniej wzorów, w dalszych obliczeniach wykorzystano
przede wszystkim uniwersalną zależność zaproponowaną przez Johannet’a [4].
Badania modelowe rezystancji zestykowej łączników próżniowych
171
Rys. 3. Wartości obliczeniowe rezystancji przejścia dla zestyku miedzianego
wyznaczone na podstawie zależności literaturowych
Na rysunku 4 pokazano obliczeniową zależność rezystancji przejścia od siły docisku
elektrod, dla materiałów wykorzystywanych w konstrukcjach zestyków styczników i
wyłączników próżniowych. Wprawdzie metale jednoskładnikowe nie mają zastosowania
praktycznego, ale uzyskane dla nich dane tworzą obwiednie spodziewanych wartości
rezystancji zestykowych kompozytów miedzi i srebra z wolframem i chromem. Materiał
WCu70/30 jest kompozytem proszkowym, powszechnie stosowanym w stycznikach
próżniowych, m.in. w komorach gaszeniowych VK-7, produkowanych w Polsce
styczników SV-7. Zakres obliczeniowy dla materiałów stycznikowych ograniczono do
125 N z uwagi na stosowanie w stycznikach próżniowych sił dociskowych nie
przekraczających wartości 100 N. W wyłącznikach próżniowych średniego napięcia
powszechnie stosowanymi materiałami stykowymi są spieki CuCr o względnie dużej
odporności na skutki erozyjne działania łuku wielkoprądowego. Siły docisku takich
styków są znaczne i osiągają wartości kilku kiloniutonów. Dla takich warunków
obliczeniowych wyznaczono rezystancje zestykowe kompozytów CuCr25 oraz CuCr40.
Uzyskane wartości zilustrowano na rysunku 4, w otoczeniu przebiegów charakterystyk
wyliczonych dla czystej miedzi i chromu.
Rys. 4. Rezystancja przejścia czystych zestyków dla przykładowych materiałów
i typowych sił docisku, stosowanych w stycznikach i wyłącznikach próżniowych
172
Jerzy Janiszewski, Andrzej Książkiewicz
Zgodnie z przewidywaniami przewaga miedzi w kompozytach CuCr25 i
CuCr40 wpływa na umiejscowienie przebiegu zmian ich rezystancji zestykowej w
sąsiedztwie charakterystyki zmian rezystancji zestyku miedzianego.
3. WYNIKI OBLICZEŃ W ODNIESIENIU DO BADAŃ
EKSPERYMENTALNYCH
Pomiary weryfikacyjne wykonano dla próżniowych komór gaszeniowych
stycznikowych (typu VK-7) oraz wyłącznikowych (typu PKG i KG). Formę
poglądową takich komór przedstawiono na rysunku 5, natomiast informacje
dotyczące konstrukcji i materiałów stykowych zawierają prace [8 i 9].
Rys. 5. Poglądowa konstrukcja próżniowej komory gaszeniowej z zaznaczeniem miejsc pomiaru
rezystancji
Na rysunkach 6 i 7 przedstawiono przykładowe wyniki pomiarów rezystancji
komór gaszeniowych w porównaniu z obliczeniowymi rezystancjami przejścia ich
zestyków, wyznaczonymi z wzorów (5) i (7).
Rys. 6. Wyznaczone doświadczalnie wartości rezystancji dla przykładowych,
stycznikowych komór próżniowych typu VK-7
Badania modelowe rezystancji zestykowej łączników próżniowych
173
Rys. 7. Wartości rezystancji dla przykładowych wyłącznikowych komór próżniowych
Z uwagi na hermetyczność użytkowej komory gaszeniowej pomiar rezystancji w
bezpośrednim pobliżu jej zestyku nie jest możliwy. W komorach stycznikowych
dostępne punkty pomiarowe 1’ i 2’ (Rys. 5) znajdują się w odległościach poniżej
5 mm od punktu styczności zestyku, zatem rezystancja torów prądowych ma mały
udział w całkowitej rezystancji pomierzonej. Mimo to, z szeregu badanych komór
tylko oznaczona numerem 166 D posiada rezystancje przejścia zbliżoną do wartości
obliczeniowych (zawartych między wynikami obliczeń wg [3] i [4] – Rys. 6) Dla
komór wyłącznikowych rezystancja torów zasilających ma wartość zbliżoną do
rezystancji zestykowej i zdecydowanie wpływa na zwiększenie zmierzonej wartości
całkowitej. Zwraca również uwagę duże zróżnicowanie nachylenia charakterystyk
zmian rezystancji dla poszczególnych komór gaszeniowych.
4. PODSUMOWANIE
Wyniki obliczeń i pomiarów wskazują na znaczne zróżnicowanie uzyskanych
danych. Dla komór stycznikowych pomiary, porównane z wynikami
analitycznymi, mogą być bezpośrednim punktem odniesienia do oceny stanu
technicznego komór eksploatowanych. W przypadku komór wyłącznikowych, (o
bardzo małych rezystancjach przejścia), przy takiej ocenie wymagane jest
uwzględnienie rezystancji torów prądowych. Wartości tych rezystancji są bowiem
zbliżone do wartości rezystancji zestykowych.
LITERATURA
[1] Kryński J., Elektryczne aparaty rozdzielcze, cz.I, PWN, Łódź – Warszawa, 1963.
[2] Holm R., Electric Contacts - Theory and Application, Springer-Verlag, Berlin, 1967.
[3] Rachowski W. I., Fiziczeskie osnowy komutacii elektriczeskogo toka w wakuumie,
Nauka, Moskwa 1970.
174
Jerzy Janiszewski, Andrzej Książkiewicz
[4] Johannet P., Study of a mathematical model representing the ageing of electrical
contacts versus time, Trans. IEEE on PAS (1972), p. 1211-1219.
[5] Ciok Z., Procesy łaczeniowe w układach elektroenergetycznych, WNT, W-wa, 1976.
[6] Maksymiuk J., Aparaty elektryczne, WNT, W-wa, 1995.
[7] Kulas S., Tory prądowe i układy zestykowe, Oficyna Wydawnicza Politechniki
Warszawskiej, W-wa, 2008.
[8] Materials for Vacuum Applications, Doduco, http://www.doduco.net/en/doduco.aspx.
[9] Janiszewski J., Batura R., Konstrukcje łączników próżniowych i próżniowych komór
gaszeniowych opracowane w Instytucie Elektroenergetyki Politechniki Poznańskiej,
Przegląd Elektrotechniczny (PL ISSN 033-2097) , nr 11b, 2010, s. 229-232.
MODEL RESEARCH OF VACUUM SWITCHES’ CONTACT RESISTANCE
Transition resistance of coupled electrodes, including in particular the power switches
electrical contacts, is the basic parameter which determines current capacity of the plate (in
the long term operating conditions) and a short-circuit load limit (above which the contacts
get welded). The results of simulation calculations of the transition resistance for selected
types of contacts made for different mathematical models are presented. There was also
made an evaluation of the compliance of theoretical results with ones got from inspections
of the real objects.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Władysław OPYDO*
Zdzisław JUSZCZYK**
WPŁYW RODZAJU MATERIAŁU ELKTROD,
TEMERATURY I GĘSTOŚCI SZEŚCIOFLUORKU SIARKI
NA JEGO WYTRZMAŁOŚĆ ELEKTRYCZNĄ
W pracy przedstawiono wyniki badań wpływu na wytrzymałość elektryczną SF6 przy
napięciu stałym: rodzaju materiału elektrod, temperatury, gęstości gazu oraz odstępu
elektrod. Badane układy miały obydwie elektrody płaskie bądź jedną elektrodę płaską, a
drugą (katodę) w kształcie pręta o średnicy 3 lub 30 mm, zakończonego półkulą. Elektrody
były wykonane ze stali nierdzewnej lub aluminium. Stwierdzono, że zmiany temperatury
SF6 w zakresie od 243 K do 293 K, przy stałej gęstości SF6, nie powodowały zmian
wytrzymałości elektrycznej gazu. Ponadto, wpływ rodzaju materiału elektrod na
wytrzymałość elektryczną SF6 występował tylko w układach z polem elektrycznym
jednostajnym makroskopowo i pojawiał się ze wzrostem gęstości gazu powyżej 15 kg/m3,
co odpowiada ciśnieniu SF6 około 2,5·105 Pa przy temperaturze 293 K. Do opracowania
matematycznego wyników badań wykorzystano program komputerowy Statistica [4].
SŁOWA KLUCZOWE: sześciofluorek siarki, inicjowanie przeskoku, wytrzymałość elektryczna
1. WSTĘP
Sześciofluorek siarki (SF6) znajduje coraz szersze zastosowanie jako ośrodek
gaszący łuk elektryczny w wyłącznikach wysokiego napięcia oraz jako ośrodek
izolujący wysokie napięcie w generatorach elektrostatycznych, urządzeniach
rentgenowskich, kondensatorach układów pomiarowych najwyższych napięć,
kablach elektroenergetycznych, rozdzielnicach wysokonapięciowych osłoniętych
[2] i transformatorach (niepalnych i niewybuchowych). Jest gazem
elektroujemnym, to znaczy jego cząsteczki mają zdolność wiązania elektronów, co
powoduje, że wytrzymałość elektryczna SF6 jest znacznie większa od
wytrzymałości elektrycznej powietrza i innych gazów. Badania właściwości
elektrycznych układów izolacyjnych z SF6 wykazały, że rodzaj materiału elektrod
układu wywiera wpływ wytrzymałość elektryczną SF6 , np. [1], [3], [5], [6], [8].
Stwierdzono, że szereg materiałów elektrodowych zestawiony zgodnie z rosnącą
__________________________________________
* Politechnika Poznańska.
** TAURON Dystrybucja S.A., Oddział w Będzinie.
176
Władysław Opydo, Zdzisław Juszczyk
wartością napięcia przeskoku w układach z SF6 jest taki sam, jak szereg
materiałów zestawiony według rosnących wartości pracy wyjścia elektronu z
materiałów elektrod tych układów [3], [8]. Wskazuje to, że na inicjowanie
przeskoku w układzie z SF6 może mieć wpływ emisja polowa elektronów z
elektrody o biegunowości ujemnej układu − katody. Intensywność emisji polowej
elektronów zależy, oprócz wartości natężenia pola elektrycznego przy powierzchni
emitującej elektrony, od wartości pracy wyjście elektronu z materiału powierzchni
emitującej oraz od temperatury tej powierzchni. Dlatego postanowiono zbadać
wpływ, na wytrzymałość elektryczną SF6 przy napięciu stałym, następujących
czynników stanu układu izolacyjnego: rodzaju materiału elektrod, temperatury,
ciśnienia gazu, odstępu elektrod oraz stopnia niejednostajności makroskopowego
pola elektrycznego przy katodzie.
2. OPIS STANOWISKA I METODY BADAWCZEJ
W badaniach wykorzystano cylindryczną komorę stalową, mającą podwójne
ściany. Przepływ alkoholu metylowego oziębianego w urządzeniu chłodniczym
między ścianami komory umożliwiał chłodzenie SF6 oraz układu elektrod. Do
pomiaru temperatur gazu i elektrod wykorzystano termopary podłączone do
woltomierzy rejestrujących. Jako temperaturę odniesienia dla termopar przyjęto
temperaturę 0°C uzyskiwaną z mieszaniny wody destylowanej z lodem.
Badano wytrzymałość elektryczną SF6 w układach z obydwoma elektrodami
płaskimi oraz w układach z jedną elektrodą płaską i drugą mającą kształt pręta
zakończonego półkulą. Elektrody płaskie były krążkami o średnicy 125 mm,
których krawędzie zaokrąglono wg wzoru Rogowskiego. Natomiast elektrody
prętowe miały średnice 3 mm lub 30 mm. Elektrody wykonano ze stali
nierdzewnej i aluminium.
Przed umieszczeniem elektrod w komorze dokładnie je szlifowano i
polerowano do lustrzanego połysku, a następnie myto acetonem, wodą
destylowaną i alkoholem etylowym w płuczce ultradźwiękowej.
Konstrukcja komory umożliwiała z zewnątrz płynną regulację i pomiar odstępu
międzyelektrodowego.
Przed napełnieniem komory SF6 odpompowywano ją, za pomocą próżniowej
pompy obrotowej olejowej, do ciśnienia około 1 Pa. Następnie, poprzez kolumnę z
silikażelem, wtłaczano do komory SF6.
Badany układ izolacyjny łączono ze źródłem wysokiego napięcia stałego za
pomocą wysokonapięciowego kabla, którego pojemność łącznie z pojemnością
wewnętrzną źródła wynosiła 1230 pF.
Przy badaniu układów z polem elektrycznym niejednostajnym elektrodę
mającą kształt pręta łączono z ujemnym zaciskiem źródła wysokiego napięcia.
Wpływ rodzaju materiału elektrod, temperatury i gęstości sześciofluorku siarki …
177
Podczas pomiarów wytrzymałości elektrycznej napięcie podnoszono z
prędkością około 0,5 kV/s.
Po zamontowaniu nowych elektrod w komorze, celem stabilizacji wartości
napięcia przeskoku, układ kondycjonowano przeskokami. Proces ten polegał na
wywołaniu w układzie z SF6 o ciśnieniu 105 Pa i temperaturze 293 K, dla każdego
z odstępów międzyelektrodowych z przedziału 1 ÷ 10 mm, zmienianych co 1 mm,
dziesięciu przeskoków kondycjonujących.
Pomiary wytrzymałości elektrycznej wykonywano w trzech niezależnych
seriach pomiarowych, używając w każdej serii nowego zestawu elektrod. Przy tym
w każdej serii, dla określonej wartości ciśnienia SF6, temperatury i odstępu
międzyelektrodowego mierzono wartości napięcia 6 kolejnych przeskoków.
Do opracowania matematycznego wyników badań wykorzystano program
komputerowy Statistica [4]. Ponieważ stwierdzono, że wielokrotne pomiary
napięcia przeskoku w badanych układach podlegają rozkładowi normalnemu, jako
wartość reprezentatywną wytrzymałości elektrycznej danego układu przyjmowano
średnią arytmetyczną wartości napięć przeskoku pomierzonych w trzech
niezależnych seriach (sześć przeskoków w serii).
3. WYNIKI POMIARÓW I ICH OMÓWIENIE
Ponieważ wytrzymałość elektryczna gazu nie zależy bezpośrednio od ciśnienia
gazu, ale od jego koncentracji, gęstości [7], więc wyniki pomiarów wytrzymałości
elektrycznej SF6 zostały na rysunkach przedstawiane jako zależności od gęstości.
Rysunki zawierają także informacje o wartości ciśnienia i temperaturze SF6, przy
których określony wynik został uzyskany.
Wyznaczone zależności napięcia przeskoku w SF6 od gęstości gazu o
temperaturze 243 K, 263 K i 293 K, dla układów z elektrodami wykonanymi ze
stali nierdzewnej oraz aluminium, oddalonymi od siebie na odległość d = 1, 5, 8 i
10 mm, przedstawiono na rys. 1. Elektrodą połączoną z ujemnym zaciskiem źródła
wysokiego napięcia stałego był pręt o średnicy 3 mm zakończony półkulą, a
elektrodą przeciwległą, połączoną z dodatnim zaciskiem źródła, była płaskim
krążkiem z zaokrąglonymi krawędziami.
Na rys. 1 punkty pomiarowe zależności wytrzymałości elektrycznej SF6 od
gęstości gazu, pomierzone przy różnych temperaturach (243 K, 263 K i 293 K),
dla układów z elektrodami wykonanymi ze stali nierdzewnej bądź aluminium,
układają się w istocie na tych samych charakterystykach. Można zatem stwierdzić,
że zmiany zarówno rodzaju materiału elektrod (stal nierdzewna, aluminium) jak i
temperatury (w zakresie 243 ÷ 293 K), przy stałej gęstości SF6, nie powodowały
zmian wytrzymałości elektrycznej badanych układów.
Na rys. 2 przedstawiono zależności wytrzymałości elektrycznej SF6 o
temperaturze 293 K od gęstości gazu, dla układów izolacyjnych, które miały
178
Władysław Opydo, Zdzisław Juszczyk
elektrody wykonane ze stali nierdzewnej bądź aluminium, oddalone od siebie na
odległość d = 1, 3, 5, 8 lub 10 mm. Elektrodą połączoną z ujemnym zaciskiem
źródła wysokiego napięcia był pręt o średnicy 30 mm zakończony półkulą.
Przeciwległą elektrodą, połączoną z dodatnim zaciskiem źródła, była płaskim
krążkiem z zaokrąglonymi krawędziami.
Rys. 1. Zależność napięcia przeskoku w SF6 od gęstości gazu o temperaturze 243 K, 263 K i 293 K,
dla układów z różnymi odstępami elektrod (d); badane układy miały elektrody wykonane ze stali
nierdzewnej lub aluminium, elektrodą o biegunowości ujemnej był pręt o średnicy 3 mm zakończony
półkulą, a elektroda o biegunowości dodatniej miała kształt krążka o średnicy 125 mm
z krawędziami zaokrąglonymi wg wzoru Rogowskiego
Z rys. 2 wynika, że pomiary wytrzymałości elektrycznej układów z SF6 z
elektrodami wykonanymi ze stali nierdzewnej, pokrywają się w istocie z
wynikami pomiarów układów z elektrodami aluminiowymi. Można zatem
stwierdzić, że także w układach, w których znacznie zmniejszono stopień
niejednostajności makroskopowego pola elektrycznego przy katodzie, przez
zwiększenie średnicy elektrody prętowej, mającej półkuliste zakończenie, z 3 mm
do 30 mm, rodzaj materiału elektrod na wpływa na wytrzymałość elektryczną
SF6. Jednocześnie, to zmniejszenie stopnia niejednostajności pola elektrycznego,
spowodowało znaczny wzrost wytrzymałości elektrycznej układów.
Na rys. 3 przedstawiono zależności wytrzymałości elektrycznej SF6 od gęstości
gazu o temperaturze 243 K, 263 K i 293 K, dla układów z obydwoma elektrodami
Wpływ rodzaju materiału elektrod, temperatury i gęstości sześciofluorku siarki …
179
płaskimi, mającymi kształt krążków z zaokrąglonymi krawędziami, wykonanymi ze
stali nierdzewnej bądź aluminium. Odstęp elektrod wynosił d = 1, 2, 3 lub 5 mm.
Rys. 2. Zależność napięcia przeskoku w SF6 od gęstości gazu o temperaturze 293 K, dla układów
z różnymi odstępami elektrod (d); badane układy miały elektrody wykonane ze stali nierdzewnej lub
aluminium, elektrodą o biegunowości ujemnej był pręt o średnicy 30 mm zakończony półkulą,
a elektroda o biegunowości dodatniej miała kształt krążka o średnicy 125 mm z krawędziami
zaokrąglonymi wg wzoru Rogowskiego
Wyniki pomiarów przedstawione na rys. 3 wykazują, że zmiana temperatury
SF6 w zakresie od 243 K do 293 K, przy stałej gęstości gazu, praktycznie nie
wpływa na wytrzymałość elektryczną zarówno układów z elektrodami
wykonanymi ze stali nierdzewnej jak i z aluminium. Z rys. 3 wynika także, że ze
wzrostem gęstości SF6 , powyżej 15 kg/m3 (co odpowiada przy temperaturze 293
K ciśnieniu SF6 około 2,5·105 Pa) pojawia się, i ze wzrostem gęstości gazu staje
się coraz silniejszy, wpływ rodzaju materiału elektrod na wytrzymałość
elektryczną. Przy tym układy izolacyjne z elektrodami wykonanymi ze stali
nierdzewnej miały większą wytrzymałość elektryczną, od wytrzymałości
elektrycznej analogicznych układów z elektrodami aluminiowymi.
Porównując wyniki badań przedstawionymi na rys. 1 i 2 z wynikami z rys. 3
można stwierdzić, że wpływ rodzaju materiału elektrod na wytrzymałość
elektryczną SF6 występował tylko w układach z polem elektrycznym
180
Władysław Opydo, Zdzisław Juszczyk
makroskopowo jednostajnym (rys. 3). Nawet stosunkowo niewielkie zwiększenie
stopnia niejednostajność makroskopowego pola elektrycznego przy katodzie
powodowało, że wpływ rodzaju materiału elektrod na wytrzymałość elektryczną
zanikał (rys. 2). Ponadto zwiększenie stopnia niejednostajność makroskopowego
pola elektrycznego, przez zastąpienie płaskiej katody elektrodą prętową o średnicy
30 mm zakończoną półkulą, praktycznie nie powodowało obniżenia
wytrzymałości elektrycznej układu (rys. 3 i rys. 2).
Rys. 3. Zależność napięcia przeskoku w SF6 od gęstości gazu o temperaturze 243 K, 263 K i 293 K,
dla układów z różnymi odstępami elektrod (d); badane układy miały elektrody płaskie o kształcie
krążka o średnicy 125 mm z krawędziami zaokrąglonymi wg wzoru Rogowskiego i były
wykonane ze stli nierdzewnej lub z aluminium
Natomiast, zastąpienie płaskiej katody, elektrodą prętową o średnicy 3 mm
zakończoną półkulą, prowadziło już do obniżenia wytrzymałości elektrycznej.
Przy tym obniżenie to było względnie (procentowo) tym większe, im większy był
odstęp elektrod (rys. 1 oraz rys. 2 i rys. 3 dla porównania).
Interpretacja fizyczna wyników tych badań jest trudna. Problemem jest już np.
samo przyjęcie rodzaju mechanizmu inicjowania przeskoku w badanych układach
izolacyjnych. Wynika to z faktu, że wartości iloczynu ciśnienia i odstępu elektrod
(p·d), obliczone dla warunków, w których przeprowadzono badania, tworzą zbiór
wartości zbliżonych do 105 Pa·cm. Ta wartość jest górną granicą występowania
Wpływ rodzaju materiału elektrod, temperatury i gęstości sześciofluorku siarki …
181
mechanizmu Townsenda i dolną granicą odmiany strimerowej mechanizmu
kanałowego [7], [9].
Wydaje się, że punktem wyjścia do interpretacji fizycznej otrzymanych
wyników może być założenie, że w badanych układach z polem makroskopowo
jednostajnym przeskok był inicjowany przez mechanizm Townsenda. Wg tego
mechanizmu wolne elektrony w przestrzeni międzyelektrodowej przyspieszone
przez pole elektryczne powodują jonizację zderzeniową cząsteczek gazu, tworząc
jony dodatnie. Ponieważ SF6 jest gazem elektroujemnym to intensywność tej
jonizacji jest ograniczone przez zjawisko wiązania (przechwytu) wolnych
elektronów przez cząsteczki gazu i tworzenie jonów ujemnych.
Powstałe jony dodatnie przyspieszają w polu elektrycznym, bombardują katodę
i wyzwalają z niej elektrony w wyniku emisji wtórnej jonowo-elektronowej.
Bombardowanie to powoduje także miejscowy wzrost temperatury katody
spowodowany zamianą przynajmniej części energii kinetycznej jonów
bombardujących w ciepło. Wzrost temperatury katody pobudza cieplnie elektrony
metalu i aktywuje emisję polową elektronów z któregoś z podgrzanych
mikroostrzy katody. Intensywność tej emisji polowej zależy od pracy wyjścia
elektronu z materiału powierzchni katody [6], [7]. Przy tym materiał
charakteryzujący się mniejszą wartością pracy wyjścia elektronu emituje, w tych
samych warunkach, wiązkę elektronową o większej gęstości. Elektrony
emitowane wskutek aktywowanej emisji polowej wspomagają inicjowanie
wyładowania.
Ponieważ do wystąpienia emisji polowej elektronów konieczne jest silne pole
elektryczne, więc emisja polowa elektronów występuje przy znacznych
wartościach natężenia pola elektrycznego. Dlatego wpływ rodzaju materiału
katody na wytrzymałość elektryczną SF6 występuje przy wartościach natężenia
pola elektrycznego makroskopowego większych od 20 ÷ 25 kV/mm. Przy tym
szereg układów izolacyjnych z SF6 , ułożony zgodnie z rosnącą wartością ich
wytrzymałości elektrycznej, jest zgodny z analogicznym szeregiem układów,
zestawionym zgodnie z rosnącą wartością pracy wyjścia elektronu z materiałów
katod tych układów.
W układzie z polem jednostajnym makroskopowo elektrony emitowane z
katody wskutek emisji wtórnej jonowo-elektronowej oraz emisji polowej
przyspieszają pod wpływem pola elektrycznego w kierunku obszaru przestrzeni
międzyelektrodowej, z którego pochodziły jony dodatnie bombardujące katodę.
Powoduje to zwiększenie liczby elektronów w tworzącej się tam lawinie
elektronowej i wspomaga rozwój wyładowania.
Natomiast, w przypadku układu z polem elektrycznym makroskopowo
niejednostajnym przy katodzie (katoda w kształcie pręta zakończonego półkulą,
anoda płaska) prawdopodobieństwo, że elektrony emitowane z katody wskutek
emisji wtórnej jonowo-elektronowej oraz emisji polowej, w takim rozkładzie pola
182
Władysław Opydo, Zdzisław Juszczyk
elektrycznego, trafią do obszaru przestrzeni międzyelektrodowej, z którego
pochodziły jony dodatnie bombardujące katodę, jest bardzo małe.
Zatem formująca się lawina elektronowa, w układzie z polem elektrycznym
makroskopowo niejednostajnym przy katodzie, w zasadzie nie jest „zasilana”
elektronami z katody, w odróżnieniu od lawiny formującej się w układzie z polem
elektrycznym makroskopowo jednostajnym. Utrudnia to inicjowanie wyładowania
mechanizmowi Townsenda i do przeskoku dochodzi w wyniku strimerowej
odmiany mechanizmu kanałowego. W strimerowej odmianie mechanizmu
kanałowego elektrony emitowane z katody nie odgrywają znaczącej roli w
procesie inicjowania przeskoku. Dlatego w badanych układach z polem
makroskopowo niejednostajnym rodzaj materiału katody nie wpływał na
wytrzymałość elektryczną.
Ta zmiana rodzaju mechanizmu inicjowania przeskoku, spowodowana zmianą
rozkładu makroskopowego pola elektrycznego, z rozkładu jednostajnego na
umiarkowanie niejednostajny, wyjaśnia dlaczego wytrzymałość układów z polem
umiarkowanie niejednostajnym makroskopowo przy katodzie nie zależy od
rodzaju materiału katody (rys. 2) i jest prawie równa wytrzymałości elektrycznej
układów z polem elektryczny makroskopowo jednostajnym (rys. 3).
4. WNIOSKI
Z pracy wynikają następujące wnioski istotne dla konstruktorów urządzeń
elektroenergetycznych,
którzy zamierzają
wykorzystywać
SF6
jako
wysokonapięciową izolację:
1. Zmiany temperatury SF6 w zakresie od 243 K do 293 K, przy stałej gęstości
SF6, w zasadzie nie powodowały zmian wytrzymałości elektrycznej gazu.
2. Wpływ rodzaju materiału elektrod na wytrzymałość elektryczną SF6 występował
tylko w układach z polem elektrycznym jednostajnym makroskopowo. Pojawiał
się on ze wzrostem gęstości gazu powyżej 15 kg/m3 (co odpowiada ciśnieniu SF6
o temperaturze 293 K około 2,5·105 Pa), przy naprężeniach przeskoku
przekraczających 20 kV/mm i stawał się coraz silniejszy ze wzrostem gęstości
SF6. Przy tym układy izolacyjne z elektrodami wykonanymi ze stali nierdzewnej
miały większą wytrzymałość elektryczną od wytrzymałości elektrycznej układów
z elektrodami aluminiowymi.
3. Nawet stosunkowo mała zmiana makroskopowego rozkładu pola
elektrycznego przy katodzie, z jednostajnego na umiarkowanie
niejednostajny, tj. zastąpienie płaskiej katody elektrodą w kształcie pręta o
średnicy 30 mm zakończonego półkulą, powodowała, że zanikał wpływ
rodzaju materiału elektrod na wytrzymałość elektryczną SF6. Przy czym ta
zmiana nie powodowała praktycznie zmniejszenia wytrzymałości
elektrycznej.
Wpływ rodzaju materiału elektrod, temperatury i gęstości sześciofluorku siarki …
183
LITERATURA
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
Cookson A. H., Electrical breakdown for uniform fields in compressed gases, Proc.
IEE, 1970, t. 117, s. 269.
Knothe S., Rozdzielnice wysokonapięciowe izolowane, Wydawnictwa NaukowoTechniczne, Warszawa 1976.
Kuffel E., Opydo W., Wpływ materiału elektrod i temperatury na wytrzymałość
elektryczną sześciofluorku siark w polu jednostajnym, Archiwum Elektrotechniki,
1980, t. 29, s. 841.
Lesińska E., Statistica Pl, StatSoft Polska, Kraków 1997.
Luxa G., Opperman G., Vigreux J., Paschen curve for sulhur hexafluoride, Electra,
CIGRE, 1974, nr 32, s. 75.
Opydo W., Problemy wysokonapięciowej izolacji próżniowej, Wydawnictwo
Politechniki Poznańskiej, Poznań 1997.
Opydo W., Właściwości gazowych i próżniowych wysokonapięciowych układów
izolacyjnych, Wydawnictwo Politechniki Poznańskiej, Poznań 2008.
Opydo W., Opydo J., Porównanie właściwości elektroizolacyjnych próżni i
sześcifluorku siarki, Archiwum Elektrotechniki, 1994, t. 43, s. 403.
Wieland A., Gasdurchlagmechanismen in elektronegtiven Gasen (SF6) und in
Gasgemischen, Elektrotechnischen Zeituschrift, 1973, A. 94, nr 7, s. 370.
EFFECT OF ELECTRODE MATERIAL, TEMPERATURE AND SULFUR
HEXAFLUORIDE DENSITY ON ITS ELECTRIC STRENGTH
The paper presents results of the study on the effects of electrode material, temperature,
gas density and electrode separation on SF6 electric strength under constant voltage. Tested
systems consisted of two plane electrodes or one plane electrode and the second one
(cathode) rod-shaped, 3 or 30 mm diameter, tipped with hemisphere. Electrodes were made
of stainless-steel or aluminum. The results revealed that SF6 temperature variations within
the range of 243 K to 293 K, under stable SF6 density, did not result in changes of electric
strength of the gas. Moreover, effect of electrode material on SF6 electric strength was
observed only in systems with macroscopically uniform field and appeared with the
increasing density of gas in system, exceeding 15 kg/m3, which corresponds to SF6 pressure
of approximately 2,5 ·105 Pa, at the temperature of 293 K. Statistica [3] software was used
for mathematical analysis of the results.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Arkadiusz DOBRZYCKI*
WPŁYW WYPOSAŻENIA KOMPUTEROWEGO
NA PARAMETRY ENERGII ELEKTRYCZNEJ
W PRZEDSIĘBIORSTWACH
Niniejsza praca dotyczy analizy poboru mocy i wpływu na parametry energii
elektrycznej stanowisk komputerowych. Przeanalizowano dwa przypadki: stanowisko z
komputerem stacjonarnym i stanowisko z laptopem. Porównano pobór prądu, mocy
czynnej i biernej, współczynnik mocy i udział harmonicznych prądu i napięcia. Wskazano
wady i zalety stosowania obu rodzajów stanowisk komputerowych w kontekście
użytkowania energii elektrycznej.
SŁOWA KLUCZOWE: zużycie energii elektrycznej, parametry energii elektrycznej,
komputery w bilansie energetycznym
1. WPROWADZENIE
W obecnych czasach komputery są podstawowym narzędziem pracy w biurach.
Wykonywane przez nie zadania mogą być nieskomplikowane (nie wymagające dużej
mocy obliczeniowej, np. przygotowywanie dokumentów) lub charakteryzujące się
dużą złożonością obliczeniową (np. komputerowe wspomaganie projektowania). Taka
różnorodność zadań sprawia, że dostępnych jest wiele typów komputerów
dedykowanych do określonych zastosowań: od ultrabooków (komputerów
przenośnych o niskim poborze energii), przez laptopy (komputery przenośne ogólnego
zastosowania) i desktopy (typowe komputery stacjonarne) po wydajne stacje robocze
(przenośne i stacjonarne).
Mimo tak szerokiego spektrum rozwiązań urządzenia te mają jedną, zasadniczą z
elektrycznego punktu widzenia cechę: są to odbiorniki nieliniowe o zmiennej wartości
obciążenia. Nieliniowość związana jest z obecnością układów prostownikowych w
zasilaczach, z kolei zmienność obciążenia powiązana jest ze sposobem pracy –
złożone zadania obliczeniowe wymagają zwiększonego poboru mocy. Ponadto,
współczesne komputery, szczególnie przenośne, wyposażone są w zaawansowane
rozwiązania techniczne pomagające optymalizować (minimalizować) zużycie energii.
Ponadto w przypadku dużych przedsiębiorstw, zwłaszcza handlowych,
usługowych czy uczelni, komputery stanowią znaczny odsetek wykorzystywanych
__________________________________________
* Politechnika Poznańska.
186
Arkadiusz Dobrzycki
urządzeń. Właściwy dobór sprzętu komputerowego, nie tylko pod kątem
wydajności, ale również zużycia energii elektrycznej może przyczynić się do
zmniejszenia zużycia energii elektrycznej, co bezpośrednio wpływa na koszty
działalności przedsiębiorstwa.
Powyższe zagadnienia rozpatrywane są głównie w kontekście wymagań
prawnych [6, 14] i dotyczą wybranych zagadnień oddziaływania na sieć, np.
poprzez emisję harmonicznych [1], lub optymalnego wykorzystania zamówionej
mocy i energii elektrycznej [3].
Niniejsza praca dotyczy zagadnienia szacowania poboru mocy i wpływu
współczesnych komputerów na parametry zasilania pozostałych odbiorników.
Pokazane zostaną różnice między przykładowym komputerem stacjonarnym, a
laptopem.
2. PRZYKŁADOWE WYNIKI POMIARÓW
2.1. Sposób prowadzenia pomiarów
Badania przeprowadzono dla dwóch komputerów stacjonarnego i przenośnego.
Zestaw stacjonarny składał się z: jednostki centralnej, monitora, klawiatury i
myszy. Natomiast badany laptop był przedstawicielem segmentu DTR (ang.
desktop replacement), czyli miał zastępować komputer stacjonarny.
Badania przeprowadzono dla zmiennego cyklu obciążenia obejmującego:
rozruch systemu, pracę z tekstem, przeglądanie stron internetowych oraz dla celów
rejestracji maksymalnej mocy pobieranej przez systemu uruchomiono testy
syntetyczne analizujące wydajność zestawu [8].
Spośród rejestrowanych parametrów do analizy wybrano: zmiany w czasie
poboru prądu i współczynnika mocy oraz harmoniczne prądu i napięcia. Celem
analizy takiego wyboru parametrów jest odpowiedź na pytanie jakie zmiany może
spowodować wymiana komputerów stacjonarnych na przenośne. Przy czym
analizowany będzie pobór prądu w kontekście minimalizacji zużycia energii
elektrycznej oraz parametry zasilania w kontekście wpływu dużej liczby
komputerów na instalację elektryczną.
Do pomiarów użyto analizatora parametrów sieci elektroenergetycznej Fluke
434 [5], natomiast do analizy wykorzystano oprogramowanie FlukeView oraz
arkusz kalkulacyjny Excel.
2.2. Wyniki pomiarów dla komputera stacjonarnego
Analizowany zestaw komputerowy składał się z: procesora Intel® Core™
i7 950, 6 GB RAM, 1 TB HDD, monitora 22”. Elementy podłączone były do
listwy zasilającej, a parametry energii elektrycznej mierzono na jej wejściu.
Wpływ wyposażenia komputerowego na parametry energii elektrycznej …
187
Zasilacz jednostki centralnej tego komputera, o mocy 500W, wyposażony był
w aktywny system poprawy współczynnika mocy PFC (ang. Power Factor
Correction). Tego typu zasilacze mają gwarantować wartość współczynnika mocy
zbliżony, często równy jedności.
Z kolei TDP (ang. Thermal Design Power), czyli moc, którą procesor pobiera (i
oddaje w postaci ciepła) [4], dla rozpatrywanego układu wynosi 130W i jest to
najbardziej energochłonny element zestawu.
Taka konfiguracja, w związku z brakiem dodatkowego wyposażenia w postaci
np. wydajnej karty graficznej, powinna skutkować poborem prądu w okolicach
1,0÷1,5 A.
Na rysunkach 1÷3 przedstawiono odpowiednio: zmiany wartości skutecznej
pobieranego prądu w czasie próby, zmiany współczynnika mocy w czasie próby,
udział poszczególnych harmonicznych prądu i napięcia w przewodzie fazowym i
neutralnym.
Rys. 1. Przykładowe zmiany wartości skutecznej prądu w czasie próby dla komputera stacjonarnego
Rys. 2. Przykładowe zmiany współczynnika mocy w czasie próby dla komputera stacjonarnego
188
Arkadiusz Dobrzycki
Rys. 3. Przykładowy udział poszczególnych harmonicznych w czasie próby dla komputera
stacjonarnego, gdzie: U(h) – zawartość h-tej harmonicznej napięcia, U(1) – zawartość 1-szej
harmonicznej napięcia, I(h) – zawartość h-tej harmonicznej prądu, I(1) – zawartość 1-szej
harmonicznej prądu, Uf – zawartość poszczególnych harmonicznych napięcia w przewodzie
fazowym, Un – zawartość poszczególnych harmonicznych napięcia w przewodzie neutralnym,
If – zawartość poszczególnych harmonicznych prądu w przewodzie fazowym, In – zawartość
poszczególnych harmonicznych prądu w przewodzie neutralnym
Wynik pomiarów są zgodne z oczekiwaniami: pobór prądu zawiera się w
przedziale od 1,0 do 1,5 A ze sporadycznymi przekroczeniami górnej granicy tego
przedziału. Jedynym momentem znacznie większego poboru prądu jest rozruch
komputera. System korygowania współczynnika mocy utrzymuje jego wartość na
poziomie 1. Podobnie jak poprzednio jedynym znaczącym wyjątkiem jest moment
startu.
Natomiast szczególnie duża jest zawartość wyższych harmonicznych napięcia
w przewodzie neutralnym oraz wyższych harmonicznych prądu występujących
zarówno w przewodzie fazowym jak i neutralnym.
2.3. Wyniki pomiarów dla komputera przenośnego
Analizowany laptop wyposażony był o niskonapięciowy procesor Intel® Core™
i7-3537U, 8 GB RAM, 1 TB HDD oraz matrycę o przekątnej 17,3”. Parametry
mierzono na wejściu zasilacza o mocy znamionowej 65 W.
Oprócz zasilacza (brak PFC) istotną różnicą było TDP procesora, które
stanowiło 13% mocy pobieranej przez procesor komputera stacjonarnego i
wynosiło 17 W [2].
Wstępna analiza, przeprowadzona po pomiarach dla komputera stacjonarnego
sugerowała oczekiwać poboru prądu w okolicach 0,15 A.
Na rysunkach 4÷6 przedstawiono odpowiednio: zmiany wartości skutecznej
pobieranego prądu w czasie próby, zmiany współczynnika mocy w czasie próby,
udział poszczególnych harmonicznych prądu i napięcia w przewodzie fazowym i
neutralnym.
Wpływ wyposażenia komputerowego na parametry energii elektrycznej …
Rys. 4. Przykładowe zmiany wartości skutecznej prądu fazowego w czasie próby
dla komputera przenośnego
Rys. 5. Przykładowe zmiany współczynnika mocy w czasie próby dla komputera przenośnego
Rys. 6. Przykładowy udział poszczególnych harmonicznych w czasie próby dla komputera
przenośnego, gdzie: U(h) – zawartość h-tej harmonicznej napięcia, U(1) – zawartość 1-szej
harmonicznej napięcia, I(h) – zawartość h-tej harmonicznej prądu, I(1) – zawartość 1-szej
harmonicznej prądu, Uf – zawartość poszczególnych harmonicznych napięcia w przewodzie
fazowym, Un – zawartość poszczególnych harmonicznych napięcia w przewodzie neutralnym,
If – zawartość poszczególnych harmonicznych prądu w przewodzie fazowym, In – zawartość
poszczególnych harmonicznych prądu w przewodzie neutralnym
189
190
Arkadiusz Dobrzycki
W przypadku komputera przenośnego o testowanej konfiguracji ukazuje się
przewaga technologii niskonapięciowej w zakresie minimalizacji poboru prądu, a
więc i poboru mocy. Wartość tego prądu zawiera się w przedziale od 0,08 do
0,16 A ze sporadycznymi przekroczeniami granic powyższego przedziału.
Natomiast niekorzystnie przedstawiają się wynik pomiarów współczynnika
mocy o wartościach poniżej 0,2. Również zawartość harmonicznych jest znaczna,
szczególnie w przewodzie neutralnym niektóre z nich przekraczają wartość
harmonicznej podstawowej.
3. ANALIZA WYNIKÓW POMIARÓW
Analizując wyniki pomiarów należy zwrócić uwagę na dwa aspekty:
sposób pracy obu typów komputerów,
zasadność porównywania wartości bezwzględnych.
W przypadku sposobu pracy komputerów nie należy zapominać, że komputer
przenośny może pracować bez źródła zasilania. Dla laptopów segmentu DTR
zwykle czas ten nie przekracza 3h przy średnim obciążeniu. Drugą konsekwencją
obecności baterii w laptopie jest zwiększony pobór prądu w trakcie ładowania
baterii. Natomiast pobór prądu komputerów stacjonarnych wykorzystywanych do
typowych zadań biurowych jest bardziej stabilny.
Z kolei porównywanie wartości bezwzględnych ma sens w przypadku analizy
licznej grupy komputerów. Jednostkowo testowany laptop pobierał 12% prądu i
1,5% mocy czynnej komputera stacjonarnego. A pobór mocy biernej laptopa
wynosił 30 Var i był pomijalnie mały.
W tabeli 1 przedstawiono wyniki symulacji zmian w obciążeniu instalacji
wskutek wymiany 100 komputerów stacjonarnych na laptopy.
Tabela 1. Symulacja spodziewanych zmian w obciążeniu instalacji po zamianie 100 komputerów
stacjonarnych na laptopy
cos ()
Stacjonarny
Laptop
dla 1 dla 100 dla 1 dla 100
szt.
szt.
szt.
szt.
1,13
113
0,13
13
1
1
0,12
0,12
P [kW]
0,26
26
0,004
0,4
Q [kVar]
0
0
0,030
3,0
Wielkość
mierzona
I [A]
Różnica
dla 1 dla 100
szt.
szt.
-1
-100
0,88
0,88
-25,6
0,256
0,030
3,0
Analizując grupę 100 jednostek należy zauważyć, że wymiana komputerów
stacjonarnych na przenośne pozwala zmniejszyć pobór mocy o ponad 25 kW przy
Wpływ wyposażenia komputerowego na parametry energii elektrycznej …
191
jednoczesnym wzroście poboru mocy biernej o 3 kVar. Wartości te mogą być
znaczące w ogólnym bilansie mocy przedsiębiorstwa.
Odrębnym zagadnieniem, jest udział harmonicznych. W obu przypadkach
udział ten jest duży szczególnie w przewodzie neutralnym i wymaga
odpowiedniego doboru przekroju przewodu neutralnego [7].
4. PODSUMOWANIE
Przyczynkiem do przeprowadzenia przedstawionej analizy była tendencja do
wymiany komputerów stacjonarnych na przenośne, zwłaszcza w niewielkich
przedsiębiorstwach. Trend taki pojawił się w momencie zrównania cen sprzętu
stacjonarnego i przenośnego. Komputer przenośny zajmuje mniej miejsca, zużywa
mniej energii i może być używany poza stanowiskiem pracy. Ponadto, zwykle
komputer jest włączany po przyjściu do pracy i wyłączany na koniec dnia.
Komputer przenośny, gdy nie jest wykorzystywany zużywa znacznie mniej energii
niż komputer stacjonarny.
Przeprowadzone pomiary oraz symulacje potwierdzają zasadność takiego
postępowania. W przypadku wykorzystania 100 komputerów zapotrzebowanie na
moc znacznie spada, a więc zmniejszą się koszty energii elektrycznej
przedsiębiorstwa. Negatywnym skutkiem takich działań jest wzrost poboru mocy
biernej.
Jednakże zasadniczym problemem dla przedsiębiorstwa są koszty dodatkowe
jakie musi spełniać stanowisko komputerowe. Archaiczne przepisy bhp dotyczące
stanowisk komputerowych pochodzą z roku 1998 i od tego czasu nie były
aktualizowane [9]. Aby laptop spełniał te warunki musi być wyposażony w
odrębną klawiaturę i monitor. Powoduje to podniesienie ceny zestawu o co
najmniej 400 zł [12]. Te dodatkowe koszty zostaną pokryte, gdy różnica zużycia
energii przekroczy 1 MWh w przypadku taryf z grupy C lub B [10]. nastąpi to po
około dwóch latach. Powyższa analiza jest szacunkowa, gdyż uwzględnia tylko
koszt energii elektrycznej, a pomija ewentualne zmniejszenie pozostałych opłat
związanych chociażby z przesyłem energii oraz ewentualnego zmniejszenia mocy
zapotrzebowanej.
LITERATURA
[1] Bednarek K., Kasprzyk L.: Suppression of higher harmonic components introduction
to the networks and improvement of the conditions of electric supply of electrical
equipment, Przegląd Elektrotechniczny, No 12b, 2012, s. 236-239.
[2] Dane techniczne procesorów Intel, http://ark.intel.com/, dostęp: 16.02.2014.
[3] Dobrzycki A., Influence of equipment modernization to parameters of electricity,
Computer Applications in Electrical Engineering, Vol 11, Poznan 2013, ss. 440-446.
192
Arkadiusz Dobrzycki
[4] Measuring Processor Power: TDP vs. ACP,
http://www.intel.com/content/www/us/en/benchmarks/resources-xeon-measuringprocessor-power-paper.html?wapkw=tdp,2011, Intel, dostęp: 16.02.2014.
[5] Mierniki jakości energii elektrycznej, www.fluke.com, dostęp: 20.11.2012.
[6] PN-EN 50160, Parametry napięcia zasilającego w publicznych sieciach
elektroenergetycznych.
[7] PN-IEC 60364-5-523:2001P Instalacje elektryczne w obiektach budowlanych –
Dobór i montaż wyposażenia elektrycznego – Obciążalność prądowa długotrwała
przewodów .
[8] Program
do
testowania
wydajności
komputerów
PC
MARK,
http://www.futuremark.com/benchmarks/pcmark, dostęp: 16.10.2013 .
[9] ROZPORZĄDZENIE MINISTRA PRACY I POLITYKI SOCJALNEJ z dnia 1
grudnia 1998 r. w sprawie bezpieczeństwa i higieny pracy na stanowiskach
wyposażonych w monitory ekranowe. (Dz.U. 1998 nr 148 poz. 973 z dnia 10
grudnia 1998 r.).
[10] Taryfy dla biznesu, http://www.enea.pl/4/energia-dla-biznesu/srednia-firma/pakietekonomiczny-130.html, dostęp: 16.02.2014.
[11] Ustawa Prawo energetyczne, Dz.U. 1997 Nr 54 poz. 348 z późń. zmianami.
[12] Wyszukiwarka cen http://www.ceneo.pl, dostęp: 16.02.2014.
THE INFLUENCE OF COMPUTER EQUIPMENT TO THE PARAMETERS
OF ELECTRICITY IN COMPANIES
This paper concerns the analysis of power consumption and influence on the parameters
of electricity computer workstations. We analyzed two cases: stand of a desktop computer
and a laptop . We compared current consumption active and reactive power consumption,
power factor, and participation current and voltage harmonics. Pointed out advantages and
disadvantages of the use of both types of computer workstations in the context of the use of
electricity.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Marcin FELINCZAK*
Jarosław JAJCZYK*
MIKROPROCESOROWY ANALIZATOR WIDMA
HARMONICZNYCH W SIECIACH NISKIEGO NAPIĘCIA
W pracy zaproponowano wykorzystanie mikrokontrolerów ośmiobitowych do analizy
zawartości harmonicznych w sieciach niskiego napięcia. Artykuł zawiera opis przyczyn i
konsekwencji występowania harmonicznych oraz metod ich analizy. Przedstawiono
projekt analizatora harmonicznych opartego o ośmiobitowy mikrokontroler. Zestawiono
wyniki pomiarów widma wykonanych zaprojektowanym analizatorem z wynikami
uzyskanymi z pomiarów za pomocą certyfikowanego analizatora. Wskazano możliwość
implementacji tego typu rozwiązania w urządzeniach wrażliwych na harmoniczne.
SŁOWA KLUCZOWE: harmoniczne, analizator harmonicznych, transformacja Fouriera
1. WSTĘP
Wszechobecność odbiorników energii elektrycznej o nieliniowej
charakterystyce prądowo-napięciowej (zarówno w przemyśle jak i w
gospodarstwach domowych) powoduje generowanie odkształceń prądu i napięcia
w sieci zasilającej [2]. Tego typu odkształcenia negatywnie wpływają na niemal
wszystkie urządzenia pracujące w sieci elektroenergetycznej jak i na samą sieć
(np. powodując przeciążenia spowodowanego wzrostem wartości skutecznej prądu
[4]). Większość skutków odkształceń nie jest dostrzegalna od razu, lecz ujawnia
się po dłuższej eksploatacji. Efektem niewłaściwych warunków zasilania są [4]:
- przeciążenia przewodów neutralnych w układach 3-fazowych,
- przeciążenia, wibracje oraz przedwczesne starzenie się generatorów,
transformatorów, silników, itp.,
- przedwczesne starzenie się izolacji w urządzeniach elektronicznych,
- przegrzewania się układów kompensacji mocy biernej.
Na uwagę zasługują również skutki krótkoterminowe, obecne szczególnie w
sprzęcie elektronicznym i telekomunikacyjnym, takie jak:
- niestabilność pracy źródeł światła (zasilanych z elektronicznych stateczników),
- tzw. „zawieszanie się” sprzętu komputerowego, sterującego, regulacyjnego,
- przerwane lub zakłócone transmisje danych.
__________________________________________
* Politechnika Poznańska.
194
Marcin Felinczak, Jarosław Jajczyk
Nieprawidłowości tego typu mogą sugerować użytkownikom awarię
urządzenia a w konsekwencji jego niepotrzebną wymianę lub reklamację. Ocena
odkształceń prądu i napięcia wymaga stosunkowo drogiego sprzętu pomiarowego.
Wykorzystanie do pomiaru harmonicznych prostych mikrokontrolerów mogłoby
stanowić konkurencyjną alternatywę. Ponadto analiza jakości energii wymaga
często długotrwałych pomiarów, ponieważ zakłócenia często są zjawiskiem
przejściowym. Implementacja pomiaru zawartości harmonicznych bezpośrednio
we wrażliwym na tego typu zakłócenia urządzeniu, pozwoliłaby na dokonywanie
pomiarów nieprzerwanie i bezobsługowo niemal przez cały czas pracy urządzenia.
2. METODY ANALIZY SYGNAŁÓW OKRESOWYCH
Analiza odkształceń prądu i napięcia polega na rozłożeniu sygnałów na
składowe harmoniczne [2]. W tym celu zastosowanie znajdują dwie metody:
analiza swept-tuned oraz analiza FFT [1].
Analiza swept-tuned wykorzystuje przestrajalne filtry pasmowo-przepustowe,
których częstotliwość środkowa jest kolejno przestrajana tak, aby „przemiatać”
przez poszczególne częstotliwości składowe. Podobnym rozwiązaniem może być
również zestaw wielu filtrów pasmowo-przepustowych o różnych
częstotliwościach środkowych, na które analizowany sygnał podawany jest
równolegle. Niestety ze względu na fakt, iż pasma kolejnych filtrów nachodzą na
siebie metoda ta obarczona jest niską czułością i małą rozdzielczością. Biorąc
jednak pod uwagę łatwość przestrajania filtrów znajduje zastosowanie głównie w
układach wysokoczęstotliwościowych [1].
Rozwiązaniem częściej stosowanym do analizy częstotliwości sieciowych jest
transformacja Fouriera [4]. Za pomocą operacji matematycznych możliwe jest
przekształcenie sygnału z dziedziny czasu do dziedziny częstotliwości [2]. Na
podstawie tej metody oparty został prezentowany w niniejszym artykule
mikroprocesorowy analizator.
Transformacja Fouriera w ujęciu cyfrowym przyjmuje postać [6]:
N 1
X [k ]
x[n] e
j 2
nk
N
(1)
n 0
gdzie: n –numer próbki przetwarzanego sygnału cyfrowego, N – liczba próbek,
k – numer składowej harmonicznej.
Ponadto na mocy wzoru Eulera ( e jx cos x j sin x ) wzór (1) może przyjąć
formę (2) [6]:
N 1
X [k ]
n 0
x( n) cos 2
N 1
nk
nk
j x( n) sin 2
N
N
n 0
(2)
Taka forma Dyskretnego Przekształcenia Fouriera (DFT) zawiera funkcje
trygonometryczne cosinus (część rzeczywista sygnału) oraz sinus (część urojona
Mikroprocesorowy analizator widma harmonicznych w sieciach niskiego napięcia
195
sygnału). Funkcje te w DFT nazywa się funkcjami bazowymi [7]. Należy przyjąć,
że są to funkcje o amplitudzie jednostkowej. Na skutek przypisania każdej
amplitudy (z dziedziny częstotliwości) do właściwej fali (funkcji bazowej)
otrzymuje się zestaw wyskalowanych fal składowych. Zsumowanie tych fal
prowadzi do otrzymania sygnału w dziedzinie czasu [2]. Dyskretna transformacja
Fouriera przekształca sygnał n – punktowy (n – liczba próbek) z dziedziny czasu
na dwa [(n/2) +1] – punktowe sygnały wyjściowe w dziedzinie częstotliwości.
Proces ten zilustrowano na rysunku 1.
Rys. 1. Idea dyskretnego przekształcenia Fouriera [4]
Amplitudę poszczególnych składowych harmonicznych otrzymuje jako moduł
wartości zespolonej (3)[6]:
2
N 1
nk N 1
nk
X [ k ] Re Im x( n) cos 2
x( n ) sin 2
N
N
n 0
n 0
2
2
2
(3)
Fazę zaś wyraża się wzorem (4)[6]:
N 1
x( n ) sin 2
n0
Im
Phase X [ k ] arctg arctg
N 1
Re
x ( n) cos 2
n 0
nk
N
nk
N
(4)
3. PROJEKT ANALZIATORA HARMONICZNYCH
Blokowy
schemat
koncepcyjny
mikroprocesorowego
analizatora
harmonicznych opartego o dyskretną transformację Fouriera przedstawiono na
rysunku 2. Założono, że próbkowanie sygnału realizowane będzie przez
wbudowany w mikrokontroler przetwornik analogowo-cyfrowy. Filtrowanie
sygnału odbywać się będzie przez sprzętowy filtr antyaliasingowy a
kondycjonowanie sygnału prądowego przez przetwornik prądowy.
196
Marcin Felinczak, Jarosław Jajczyk
Rys. 2. Schemat ideowy analizatora harmonicznych
W celu dostosowania sygnału prądowego do możliwości pomiarowych
przetwornika
analogowo-cyfrowego
wbudowanego
w
mikrokontroler,
wykorzystano przetwornik prądowy LEM LA 25-P. Sygnałem wyjściowym z
układu jest w tym przypadku prąd będący w proporcji 1:10000 odpowiednikiem
mierzonego prądu wejściowego. Ponadto sygnały poddano filtracji
dolnoprzepustowej, aby zminimalizować efekt aliasingu. W tym celu wykorzystać
można filtry aktywne wyższego rzędu oparte o wzmacniacze operacyjne lub
gotowe filtry monolityczne.
Szczegóły dotyczące budowy i oprogramowania zaprojektowanego analizatora
harmonicznych przedstawiono w pracy [3].
Zaprojektowany analizator zbudowano i wyposażono w klawisze funkcyjne za
pomocą których możliwy jest wybór sygnału wejściowego oraz rodzaju analizy.
Wyświetlacz LCD pozwala na prezentację wyników.
Poszczególne opcje menu dostępne w urządzeniu zaprezentowano na
rysunku 3.
Prezentacja
wyników DFT
- Dane
- Wykres
Przebieg
Analiza
Analizator
harmonicznych
- MENU
DFT
FFT
MENU
- Analiza prądu
- Analiza napięcia
- Pdgląd sygnalów
Przebieg
DFT
Analiza
FFT
Prezentacja
wyników FFT
- Dane
- Wykres
Prezentacja
wyników DFT
- Dane
Prąd
- Wykres
Napięcie
Prezentacja
wyników FFT
- Dane
- Wykres
Rys. 3. Menu użytkownika analizatora harmonicznych
Mikroprocesorowy analizator widma harmonicznych w sieciach niskiego napięcia
197
4. BADANIA ZAPROJEKTOWANEGO ANALIZATORA
Zaprojektowany mikroprocesorowy analizator widma skonfrontowano z
seryjnym analizatorem Dranetz Analyst 3Q Power Quality Analyzer [5]. Jako
badany odbiornik wykorzystano rezystor, zaś napięcie zasilające odbiornik zostało
celowo zniekształcone za pomocą diody prostowniczej (wycięcie jednej połówki
sinusoidy). Wyniki pomiarów przebiegu prądu uzyskanego przez analizator
Analyst 3Q oraz analizator prototypowy przedstawiono w tabeli 1.
Tabela 1. Procentowa zawartości składowych harmonicznych w przebiegu prądu
Rząd
harmonicznych
k
1
2
3
4
5
6
8
Amplituda w odniesieniu do podstawowej harmonicznej [%]
Analizator prototypowy
Analizator Analyst 3Q
(zaprojektowany)
100
100
43,3
39
0,3
3
9,2
11
1,3
4
3
4
2,4
2
Na podstawie pomiarów sporządzono wykres widma harmonicznych (rys. 4)
zanotowanych przez oba urządzenia (bez podstawowej harmonicznej).
Rys. 4. Widma harmonicznych przebiegu prądu zanotowane przez porównywane urządzenia
Wyniki pomiarów przebiegu napięcia przez analizator Analyst 3Q oraz
analizator prototypowy przedstawiono w tabeli 2.
198
Marcin Felinczak, Jarosław Jajczyk
Tabela 2. Procentowa zawartości składowych harmonicznych w przebiegu napięcia
Rząd
harmonicznych
k
1
2
3
4
5
6
8
Amplituda w odniesieniu do podstawowej harmonicznej [%]
Analizator prototypowy
Analizator Analyst 3Q
(zaprojektowany)
100
100
42,7
38
0,3
3
9,3
10
1,4
4
2,6
4
2,8
2
Na podstawie pomiarów sporządzono wykres (rys. 5) widma harmonicznych
zanotowanych przez oba urządzenia (bez podstawowej harmonicznej).
Rys. 5. Widma harmonicznych przebiegu napięcia
5. WNIOSKI
Certyfikowane urządzenia do analizy widma harmonicznych należą do jednych
z najdroższych urządzeń pomiarowych. W artykule zaprezentowano projekt
nieporównywalne tańszego urządzenia, stanowiącego jednak przydatne narzędzie
do analizy zawartości harmonicznych w sieci niskiego napięcia.
Konfrontacja wyników analizy widma harmonicznych z wynikami uzyskanymi
z pomiarów seryjnym analizatorem jakości energii elektrycznej potwierdziła
prawidłową pracę zaprojektowanego rozwiązania. Należy jednak zwrócić uwagę
na fakt, że seryjne analizatory jakości energii elektrycznej posiadają znaczne
szerszy zakres pomiarowy (do 40 harmonicznej [5]) a ponadto analiza widma
harmonicznych jest tylko jedną z dostępnych opcji, tuż obok pomiaru poziomu
napięcia (rejestracja przebiegów), detekcji zapaści i zaników napięcia, pomiaru
mocy biernej, pomiaru niesymetrii w układach 3-fazowych.
Mikroprocesorowy analizator widma harmonicznych w sieciach niskiego napięcia
199
Zaprojektowane
rozwiązanie
ma
pozwalać
na
implementację
mikroprocesorowej analizy widma w urządzeniach wrażliwych na tego typu
zakłócenia, gdzie analiza harmonicznych byłaby jedynie dodatkową autonomiczną
funkcją. W ten sposób, możliwe byłoby rozszerzenie autodiagnostyki urządzeń o
kontrolę warunków zasilania i raportowanie niezgodności (np. zapisywanie błędów
w pamięci mikrokontrolera). Jest to szczególnie ważne w procedurze reklamacji
gotowych produktów przez konsumenta. Producent na podstawie danych
diagnostycznych mógłby wykluczyć niezależne od niego problemy z zasilaniem
produktu. W przypadku zarejestrowania problemów z jakością zasilania konieczne
byłoby przeprowadzenia analizy urządzeniem certyfikowanym.
LITERATURA
[1] Agilent Technologies, Spectrum Analysis Basics, Application Note 150, (5952-0292).
[2] Hanzelka Z., Jakość Energii Elektrycznej, Akademia Górniczo-Hutnicza, Kraków
[3] Felinczak M., Mikroprocesorowa analiza widma harmonicznych w sieciach niskiego
napięcia, Praca magisterska, Wydział Elektryczny, Politechnika Poznańska, Poznań
2013.
[4] Maciążek M., Pasko M., Skutki oddziaływania wyższych harmonicznych na sieć
zasilającą oraz wybrane metody ich eliminacji, Instytut Elektrotechniki Przemysłowej
i Informatyki, Wydział Elektryczny, Politechnika Śląska, Prace Instytutu
Elektrotechniki, zeszyt 242, 2009.
[5] Nota katalogowa urządzenia Analyst 3Q Power Quality Analyser
http://www.makranyi.hu/lem/Analyst_3Q_LEM_Eng.pdf
[6] Smith W., Digital Signal Processing: A Practical Guide for Engineers and
Scientists, Warszawa 2007 ( in Polish), Wydawnictwo BTC.
[7] Szabatin J., Podstawy teorii sygnałów, Wydawnictwa Komunikacji i Łączności
WKŁ, 2007; ISBN: 8320613310.
MICROPROCESSOR HARMONIC SPECTRUM ANALYZER
IN LOW VOLTAGE NETWORKS
The paper proposes the use of eight-bit microcontrollers to analyze the harmonic
content low voltage network. The article includes a description of the causes and
consequences of the occurrence of harmonics and methods of analysis. A draft harmonic
analyzer based on an eight-bit microcontroller. Summarizes the results of measurements of
spectrum analyzer designed made of the results obtained from measurements using a
certified analyzer. Indicated the possibility of implementing this type of solution in devices
sensitive to harmonics.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Ryszard PORADA*
Adam GULCZYŃSKI*
STEROWANIE ENERGOELEKTRONICZNYM
ŹRÓDŁEM NAPIĘCIA Z ZASTOSOWANIEM
REGULATORÓW UŁAMKOWYCH
Tradycyjne metody sterowania układów energoelektronicznych nie umożliwiają
uzyskania wymaganej obecnie wysokiej jakości sygnałów wyjściowych. W pracy
przedstawiono ogólną charakterystykę klasycznych oraz współczesnych metod
wykorzystujących w sterowaniu regulatory ułamkowe. Omówiono algorytmy tych
regulatorów i opisano możliwości ich zastosowania do sterowania niezależnym
energoelektronicznym źródłem napięcia. Przedstawiono wybrane wyniki badań
symulacyjnych takiego układu, dla różnych typów sygnałów zadanych.
SŁOWA KLUCZOWE: energoelektronika, niezależne źródła napięcia, sterowanie ułamkowe
1. WPROWADZENIE
Przekształcanie energii elektrycznej pobieranej z dostępnych technicznie źródeł
energii o określonym napięciu/prądzie i częstotliwości, na napięcie/prąd i
częstotliwość wymagane przez odbiorniki energii elektrycznej, a także sterowanie
przepływem tej energii jest głównym zadaniem układów energoelektronicznych.
Przekształtniki te powinny kształtować sygnały wyjściowe napięcia/prądu w
sposób optymalny ze względu na zadania realizowane przez odbiornik.
Pracujące jako niezależne źródła napięcia i prądu układy energoelektroniczne
znajdują zastosowanie w różnych dziedzinach specjalnych (m.in. generatory
energetycznych przebiegów wzorcowych), układy realizujące np. optymalne
sterowanie napędów elektrycznych, jako bloki wykonawcze w układach aktywnej
kompensacji [10], a także źródła prądu stosowane w magnetoterapii [9].
Do sterowania takimi układami nadal wykorzystuje się klasyczne regulatory
PID (szczególnie w wersji cyfrowej), jako dobrze znane i szeroko stosowane
w praktycznych rozwiązaniach ze względu na skuteczność, odporność oraz
stosunkowo proste metody strojenia parametrów regulatora dla uzyskania
optymalnych odpowiedzi obiektu. Od kilkunastu lat coraz częściej stosowana jest
także niekonwencjonalna technika sterowania, znana jako sterowanie rzędu
__________________________________________
* Politechnika Poznańska.
202
Ryszard Porada, Adam Gulczyński
ułamkowego [5, 6, 8] ze względu na możliwość zwiększenia jakości sterowania, a
tym samym polepszenia jakości sygnałów wyjściowych.
W pracy przedstawiono badania układu zamkniętego niezależnego
energoelektronicznego źródła napiecia. Porównanie regulatora klasycznego
(dobranego według kryterium modułu) z regulatorem ułamkowym wykonano dla
tego samego układu, o tych samych parametrach. Przedstawiono wybrane wyniki
badań symulacyjnych dla różnych typów sygnałów zadanych oraz różnych
warunków obciążenia.
2. REGULATORY UŁAMKOWE PI ( ) D ( )
Klasyczne regulatory o działaniu proporcjonalno-całkująco-różniczkującym
(РID) [1, 2, 3] są od kilkudziesięciu lat stosowane w układach automatycznej
regulacji. Idealną postać tych regulatorów opisuje transmitancja:
GR ( s) K p 1 1 sTD
(1)
sTI
gdzie: K p – współczynnik wzmocnienia, TI – stała całkowania (czas zdwojenia),
TD – stała różniczkowania (czas wyprzedzenia).
Parametry klasycznych regulatorów PID są dobierane według kryteriów jakości
regulacji [1, 2], do których należą m.in: kryteria zapasu stabilności, kryteria
rozkładu pierwiastków równania charakterystycznego, kryteria czasowe, kryteria
częstotliwościowe czy kryteria całkowe.
Obecnie coraz większe zainteresowanie budzą regulatory РID, w których
procedury całkowania i różniczkowania odbywają się według algorytmów
niecałkowitych rzędów [5, 6, 8]. Takie regulatory opisuje transmitancja
niecałkowitego rzędu:
GRPI D ( s) K p 1 1 TD s
(2)
TI s
gdzie oprócz wyżej wymienionych parametrów K p , TI oraz TD dochodzą jeszcze
dwa: – rząd całkowania oraz – rząd różniczkowania. Możliwość tę stwarza
uogólnienie operacji całkowania i różniczkowania dla niecałkowitego
(ułamkowego) rzędu.
Dla zastosowań praktycznych w automatyce stosowane są metody transformaty
Laplace'a. Transformata ułamkowa Laplace'a w sensie definicji pochodnych i całek
niecałkowitego rzędu, wymaga zastosowania odpowiednich metod aproksymacji
[7, 8]. Proponowane są różne metody aproksymacji takiego wyrażenia w czasie
ciągłym oraz dyskretnym [8, 10, 11].
Dla takich regulatorów nie opracowano jeszcze jednoznacznych reguł strojenia.
Najczęściej dla ilościowej oceny właściwości dynamicznych układu bada się
Sterowanie energoelektronicznym źródłem napięcia z zastosowaniem …
203
odpowiedź na skok jednostkowy przy uwzględnieniu różnych wskaźników, m.in.
zerowego błędu regulacji, zapasu fazy i wzmocnienia, odporności na zmiany
wzmocnienia obiektu, odporności na szumy wysokiej częstotliwości czy
minimalnego odkształcenia sygnału wyjściowego [6, 7, 9].
3. STRUKTURA FALOWNIKA NAPIĘCIA
Możliwość zastosowania regulatorów ułamkowych przetestowano na
przykładzie 1-fazowego niezależnego źródła napięcia w środowisku
Matlab®/Simulink®.
Części składowe energoelektronicznego źródła napięcia pokazano na rysunku 1.
Na wyjściu falownika zastosowano filtr dolnoprzepustowy LPF. Sygnał sterujący
u jest generowany przez regulator; sygnał y jest sygnałem na wyjściu
energetycznym falownika.
a)
b)
L
Ro
C
Lo
Rys. 1. Struktura blokowa: a) części energetycznej niezależnego źródła napięcia
oraz b) filtr wyjściowy (LPF) 2-go rzędu z gałęzią odbiornikową RoLo
Badania miały na celu określenie skuteczności odwzorowania sygnału zadanego
(napięcia wyjściowego na gałęzi odbiornikowej RoLo) dla następujących
parametrów układu: napięcie zasilania falownika 400 [V], częstotliwość nośna
modulacji MSI, fPWM = 12,5 kHz, modulacja MSI unipolarna. Przyjęte parametry
dolnoprzepustowego filtru wyjściowego (Rys. 1b) wynoszą: L = 250 [μH], C =
15 [μF], natomiast parametry odbiornika: UN = 230 [V], IN = 10 [A], Po = 2 [kW],
cosφN = 0,85 [-].
4. WYZNACZENIE STRUKTURY REGULATORA
Przedmiotem badań będzie przekształtnik przedstawiony blokowo na rysunku 1.
Dobór regulatora struktury regulatora przeprowadzono na podstawie typowego
kryterium optimum modułu [1, 2], dla którego transmitancja układu zamkniętego
ma postać:
1
Gz ( s)
(3)
2 2 s 2 2 s 1
204
Ryszard Porada, Adam Gulczyński
gdzie jest najmniejszą stałą czasową układu. Transmitancję obiektu
składającego się z filtru wyjściowego 2-go rzędu oraz gałęzi odbiornikowej typu
Ro Lo przedstawia wyrażenie:
GF ( s)
02 ( s o )
s 3 o s 2 o02 s o02
(4)
przy czym:
R
L Lo
02 1 , o o , o
Lo
Lo
LC
s
Przekształtnik opisano jako człon opóźniający e , który po aproksymacji 1-go
rzędu wyraża wzór:
G M ( s ) E e s E
(5)
s 1
gdzie jest czasem opóźnienia wnoszonym przez przekształtnik. Ostatecznie obiekt
sterowania ma transmitancję:
E 02
(s o )
1
Go ( s )
(6)
( s 1 ) ( s 3 o s 2 o02 s o 02 )
Transmitancję regulatora, dla jednostkowego sprzężenia zwrotnego,
wyznaczono na podstawie wyrażenia:
Gz ( s)
GR ( s)
(7)
(1 Gz ( s ))Go ( s)
skąd po uwzględnieniu (3) i (6) uzyskano:
W
W
GR ( s) W1s W0 (W1 W2 ) 1 3 4
(8)
s s s1 s s2
gdzie współczynniki ( W1 W4 ) oraz s1 , s2 są wyrażone przez odpowiednie
parametry obiektu.
Wyrażenie (8) jest podstawą do uzyskania postaci ułamkowej regulatora
zgodnie z zasadami aproksymacji przedstawionymi w [7, 8].
5. BADANIA SYMULACYJNE
Wyniki symulacji dla układu zamkniętego z regulatorem opisanym transmitancją
GR ( IO) ( s) oznaczono jako I o (IO ) gdzie IO oznacza całkowity rząd regulatora (ang.
Integer Order). Wyniki symulacji oznaczone przez I o (FO ) uzyskano w układzie
zamkniętym z regulatorem niecałkowitego rzędu (FO – ang. Fractional Order) w
którym rząd różniczkowania przyjęto vi 1,08 .
Badania przeprowadzono dla różnych kształtów i parametrów sygnału
zadanego. Na wszystkich rysunkach zastosowano jednakowe oznaczenia: linia
Sterowanie energoelektronicznym źródłem napięcia z zastosowaniem …
205
czarna kropkowana – sygnał zadany; linia czarna ciągła – napięcie wyjściowe w
układzie z regulatorem ciągłym; linia czerwona ciągła – napięcie wyjściowe w
układzie z regulatorem ułamkowym.
Na rysunkach 2 i 3 pokazano wybrane przebiegi napięcia wyjściowego układu
dla przypadku sygnałów zadanych, odpowiednio: prostokątnego o amplitudzie
Um= 325 [V] oraz częstotliwości 50 Hz i 300 Hz, a także sinusoidalnego o
parametrach Um= 325 [V], f = 50 Hz oraz odkształconego sygnału zadanego (1-sza
i 17-ta harmoniczne).
a)
b)
500 U [V]
o
500 U [V]
o
uref (t)
uo(t)IO
uo(t)FO
0
0
uref (t)
uo(t)IO
uo(t)FO
-500
0
0.005
t[ms]
0.01
0.015
0.02
t[ms]
-500
0.025
0
0.005
0.01
0.015
0.02
0.025
Rys. 2. Przebiegi napięcia wyjściowego dla prostokątnego sygnału zadanego:
amplituda napięcia Um= 325 A; a) częstotliwość f = 50 Hz, b) częstotliwość f = 300 Hz
Przebieg prostokątny jako sygnał o dużej dynamice jest dobrym narzędziem
testowania dynamiki sterowania oraz jakości odwzorowania sygnału zadanego. W
analizowanym przypadku, dla zadanego przebiegu prostokątnego, zarówno z
regulatorem całkowitym, jaki i niecałkowitego rzędu, odpowiedź układu wskazuje na
uzyskanie dobrej dynamiki. W przypadku regulatora ułamkowego odpowiedź ma
nieco mniejszą dynamikę, zbliżony uchyb ustalony oraz większe tłumienie składowych
o wyższych częstotliwościach jest (brak oscylacji oraz mniejsze przeregulowanie).
a)
b)
500 U [V]
o
500 U [V]
o
uref (t)
uref (t)
uo(t)IO
uo(t)IO
uo(t)FO
uo(t)FO
0
0
t[ms]
-500
0
0.005
0.01
0.015
0.02
0.025
t[ms]
-500
0
0.005
0.01
0.015
0.02
Rys. 3. Przebiegi napięcia wyjściowego dla sinusoidalnego sygnału zadanego:
a) Um= 325 V, f = 50 Hz; b) dodatkowo z 17-tą harmoniczną
0.025
206
Ryszard Porada, Adam Gulczyński
Dla przebiegu sinusoidalnego o częstotliwości 50 Hz działanie układu z
obydwoma typami regulatorów (całkowitego i ułamkowego rzędu) jest zbliżone.
Również sygnał wieloharmoniczny jest odwzorowany z dobrą dynamiką. Uzyskana
podobna jakość sterowania dla obu typów sterowania jest związana z mniejszą dynamiką
sygnału zadanego. Na rysunku 4 pokazano reakcję układu zamkniętego na skokowe
zmiany sygnału zadanego. W tym przypadku regulator ułamkowy zapewnia lepsze
tłumienie odpowiedzi układu niż regulator ciągły.
Uo[V]
400
uref (t)
uo(t)IO
350
uo(t)FO
300
250
200
150
100
50
t[ms]
0
0
1
2
3
4
5
6
7
8
Rys. 4. Odpowiedź układu na skok sygnału zadanego
a)
b)
Uo[V]
400
uref (t)
350
uo(t)IO
300
uo(t)FO
Uo[V]
400
uref (t)
uo(t)IO
350
uo(t)FO
300
250
250
200
200
150
150
100
100
50
50
t[ms]
0
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
t[ms]
5
0
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Rys. 5. Odpowiedź układu na skok obciążenia: a) z obciążenia znamionowego
do stanu jałowego; b) od stanu jałowego do obciążenia znamionowego
Rysunek 5 przedstawia reakcję układu zamkniętego na skokowe zmiany
parametrów odbiornika. Również w tym przypadku przypadku regulator ułamkowy
zapewnia lepsze tłumienie odpowiedzi układu.
6. PODSUMOWANIE
W pracy przedstawiono badania układu zamkniętego niezależnego
energoelektronicznego źródła napięcia. Porównanie skuteczności działania regulatora
klasycznego z regulatorem ułamkowym (określonego według kryterium modułu)
wykonano dla tego samego układu, o tych samych parametrach. Wyniki badań
symulacyjnych potwierdzają możliwość skutecznego wpływu regulatora ułamkowego
na jakość procesów dynamicznych zachodzących w układzie przez polepszenie jego
Sterowanie energoelektronicznym źródłem napięcia z zastosowaniem …
207
dynamiki. Brak jednoznacznych reguł strojenia regulatorów ułamkowych znacząco
utrudnia prawidłowy dobór rzędu operatorów skutkujący polepszeniem wskaźników
dynamicznych odpowiedzi. Uzyskane wyniki wskazują także na potrzebę dalszych
badań zastosowanego regulatora całkowitego oraz jego wersji ułamkowej, szczególnie
dla bardziej złożonych transmitancji obiektu sterowania.
LITERATURA
[1] Brzózka J., Regulatory i układy automatyki. MIKOM, Warszawa 2004.
[2] Byrski W., Obserwacja i sterowanie w systemach dynamicznych. Uczelniane
Wydawnictwa Naukowo-Dydaktyczne AGH, Kraków 2007.
[3] Grega W., Metody i algorytmy sterowania cyfrowego w układach scentralizowanych
i rozproszonych. Uczelniane Wydawnictwa Naukowo-Dydaktyczne AGH, Kraków 2004.
[4] Gwóźdź M., Porada R.: Utilization of Wideband Power Electronics Current Sources in
Generator of Spatial Magnetic Field. Proc. of 15th International Power Electronics &
Motion Control Conference and Exposition, EPE-PEMC’12 ECCE Europe, Novi Sad,
Serbia, 1-3 September 2012, INVITED SPECIAL SESSION: “Power electronics in
biomedical applications”, LS5a (ISS-16)-666_EPE_2012.pdf, LS5a.2.1-5, (full paper on
Conference CD-ROM).
[5] Kosztołowicz T., Zastosowanie równań różniczkowych z pochodnymi ułamkowymi do
opisu subdyfuzji. Wydawnictwo UH-P, Kielce 2008.
[6] Ostalczyk P., Zarys rachunku różniczkowo-całkowego ułamkowych rzędów. Teoria
i zastosowanie w automatyce. Wydawnictwo Politechniki Łódzkiej, Łódź 2008.
[7] Petráš I.. Fractional-order feedback controlof a dc motor. Journal of Electrical
Eengineering, vol. 60, no. 3, 2009, 117-128.
[8] Podlubny I., Fractional Differential Equations, Academic Press, San Diego, 1999.
[9] Porada R., Gulczyński A.: Badania porównawcze regulatorów klasycznych i ułamkowych
w sterowaniu obiektów z opóźnieniem. Mat. XV Konf. „Zastosowanie Komputerów w
Elektrotechnice”, ZKwE'12, PUT Academic Journal, Electrical Engineering, Poznań 2012,
No. 71, ss. 109-116.
[10] Monje C.A., Vinagre B.M., Feliu V., Chen Y.Q., Tuning and Auto-Tuning of Fractional
Order Controllers for Industry Application, Control Engineering Practice 16 (2008), 798-812.
[11] Vinagre B.M., Podlubny I., Hernandez A., Fe-Liu V., Some Approximations of Fractional
Order Operators used in Control Theory and Applications, Fractional Calculus and
Applied Analysis 3 No. 3 (2000), 231-248.
THE CONTROL OF POWER ELECTRONICS VOLTAGE SOURCE
WITH APPLICATION OF FRACTIONAL REGULATORS
Traditional methods of control of power electronics systems do not enable to obtain
required nowadays qualities of output signals. The work presents a general characteristics
of classical and modern methods using in control discrete fractional regulators. We
discussed algorithms of these regulators and described possibilities of their use to control
independent power electronics voltage source. Selected simulation results of the system for
different reference signals are also included.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Ryszard PORADA*
MODEL CZĘSTOTLIWOŚCIOWY UKŁADÓW
ENERGOELEKTRONICZNYCH Z MODULACJĄ
Sterowanie układów energoelektronicznych jako struktur zamkniętych stwarza bardzo
duże trudności ze względu na obecność w torze głównym modulowanego źródła napięcia.
Omówiono stosowane dotychczas metody opisu przekształtnika i jego właściwości
częstotliwościowe. Przedstawiono nową metodę opisu częstotliwościowego przekształtnika
jako zmodulowanego źródła napięcia. Pokazano wybrane wyniki badań proponowanej
metody opisu przekształtnika.
SŁOWA KLUCZOWE: energoelektronika, falowniki niezależne, modulacja MSI
1. WPROWADZENIE
Układy przekształtnikowe powinny zapewnić maksymalnie wierne (statyczne
i dynamiczne) odwzorowanie sygnałów zadanych na wyjściu energetycznym,
w możliwie najszerszym pasmie częstotliwości. Właściwości takie można uzyskać
w układach energoelektronicznych pracujących jako układy zamknięte, sterowane
z wykorzystaniem różnych wariantów modulacji.
Algorytmy sterowania ogólnie można podzielić na optymalne parametrycznie oraz
optymalne strukturalnie [2, 3]. W pierwszym przypadku dobór nastaw regulatorów
oraz ich struktura nie są związane bezpośrednio ze strukturą obiektu sterowanego. W
drugim przypadku synteza regulatora wynika z samej struktury obiektu, natomiast
współczynniki go opisujące – również z modelu obiektu. W tym drugim przypadku
niezbędny jest opis transmitancyjny przekształtnika jako obiektu regulacji.
Transmitancyjny model przekształtnika niezbędny do określenia transmitancji
obiektu, opiera się najczęściej na modelu przekształtnika jako członu proporcjonalnego
lub członu opóźniającego. Szczególnie ten drugi model jest niekorzystny z punktu
widzenia sterowania przekształtnika jako układu zamkniętego.
W pracy przedyskutowano stosowane aproksymacje i ich właściwości
częstotliwościowe w porównaniu z zaproponowaną nową aproksymacją
charakterystyki częstotliwościowej przekształtnika, jako zmodulowanego źródła
napięcia. Pokazano wybrane wyniki badań porównawczych tradycyjnych i
proponowanych aproksymacji.
__________________________________________
* Politechnika Poznańska.
210
Ryszard Porada
2. TRADYCYJNY MODEL PRZEKSZTAŁTNIKA
W najprostszym przypadku (np. układów DC/DC [4,6]), przekształtnik można
modelować jako idealny łącznik, generujący dwa stany: „stan załączenia” i „stan
wyłączenia” łącznika, wywołane sygnałem sterującym. Tak określony
przekształtnik jest układem, który na dyskretny sygnał sterujący odpowiada
wygenerowaniem nieciągłej funkcji wyjściowej w postaci impulsu prostokątnego –
rysunek 1.
tk
Rys. 1. Przebieg sygnału wyjściowego prostego przekształtnika DC/DC
Taki impuls może być przedstawiony w dziedzinie czasu jako
f (t ) A1(t ) A1(t tk ) , gdzie 1(t ) jest funkcją skoku jednostkowego.
Transformata Laplace’a tego wyrażenia ma postać:
s tk
G( s) A 1 e
s
(1)
Przy małych odchyłkach sygnału od stacjonarnego punktu pracy można
zlinearyzować to wyrażenie do postaci:
G ( s ) Ae s t k
Przekształtnik może więc być traktowany jako element przełączający
odpowiadający funkcji opóźniającej. Jest to często stosowana postać transmitancji
(szczególnie dla przekształtników o komutacji sieciowej [4, 6]) niezbędna do opisu
obiektu w zamkniętym układzie sterowania. W wielu przypadkach opisuje się
przekształtnik także jako modulowany transformator idealny, któremu w opisie
transmitancyjnym odpowiada człon proporcjonalny [1, 2]. Charakterystyki
modułowa i fazowa takich członów nie odzwierciedlają jednak właściwości
częstotliwościowych przekształtnika jako źródła modulowanego napięcia,
szczególnie w przypadkach pracy układu energoelektronicznego jako niezależnego
źródła napięcia lub prądu z odbiornikami o małych stałych czasowych.
Ograniczając się do przekształtników z zaworami w pełni sterowalnymi,
zasilanymi z idealnego źródła napięcia, można modelować przekształtnik jako
modulowane idealne źródło napięcia.
Model częstotliwościowy układów energoelektronicznych z modulacją
211
3. MODEL CZĘSTOTLIWOŚCIOWY PRZEKSZTAŁTNIKA
Układy energoelektroniczne są układami, które na nieciągły sygnał sterujący
odpowiadają generowaniem nieciągłego sygnału wyjściowego. Przykładem jest
prosty układ mostka 1-fazowego (rysunek 2a) z modulacją MSI, realizowaną przez
komparację sygnałów (rysunek 2b): zadanego s z (t ) oraz nośnego s N (t ) .
Wynikiem tej komparacji jest sygnał modulujący s M (t ) , który zależnie od
zastosowanego sposobu modulacji generuje odpowiednie sygnały sterujące
zaworami przekształtnika.
s z (t )
T1
T2
s z (t )
eM (t )
E
T3
T4
sM (t )
sN (t )
Rys. 2. Schemat zastępczy niezależnego fazowego falownika napięcia
Na tej podstawie można przedstawić falownik napięcia jako modulowane
żródło napięcia – rysunek 3, z przykładowym odbiornikiem w postaci filtru
pasywnego LC oraz gałęzi odbiornikowej typu Ro Lo .
i
sz (t )
L
Ro
eM (t )
C
uo
Lo
Rys. 3. Falownik napięcia jako modulowane źródło napięcia
Ogólnie, transformatę przekształtnika jako modulowanego źródła napięcia
można przedstawić jako:
E ( s)
GM ( s ) M
(2)
S z (s)
Ponieważ przekształtnik jest układem silnie nieliniowym i niestacjonarnym, jego
jednoznaczny opis transmitancyjny nie jest możliwy. Można jednak rozważać
212
Ryszard Porada
poszczególne przypadki układów. Przedstawiono dwa podstawowe, dotyczące
układów DC/DC oraz DC/AC. Ograniczono się do modulacji MSI unipolarnej.
Przedstawiona poniżej metodyka postępowania umożliwia w prosty sposób
uzyskanie odpowiednich postaci opisu transmitancyjnego dla innych przypadków
modulacji.
Dla układu DC/DC zadaniem przekształtnika jest przekształcanie stałego
napięcia źródła energii na napięcie stałe o regulowanej wartości średniej. Dla
przyjętej modulacji MSI unipolarnej (modulacja niesymetryczna prawostronna)
kształt napięcia wyjściowego pokazano na rysunku 4.
A
tk
t
3TN
2TN
TN
2TN
TN
3TN
Rys. 4. Nieskończony ciąg impulsów prostokątnych (modulacja niesymetryczna prawostronna)
Dla nieskończonego ciągu impulsów prostokątnych (rysunek 1) powtarzanych
z `okresem TN , transformata Laplace’a ma postać:
GM ( s ) L [ sM (t )] A 1 e
s
s tk
e
snTN
n
A1 e
s
s tk
1
1 e sTN
(3)
Transmitancja (3) uwzględnia wszystkie istotne parametry przekształtnika, jak
okres modulacji TN oraz czas trwania impulsu t k . Jest jednak mało wygodna
w opisie przekształtnika jako obiektu regulacji ze względu na obecność funkcji
opóźniających o różnych czasach opóźnienia. Doprowadzenie do bardziej
użytecznej postaci wymaga aproksymacji funkcji opóźniającej. Proponowane są
różne metody aproksymacji funkcji opóźnienia: rozkład na szereg Taylora,
aproksymacji za pomocą funkcji niewymiernych pierwszego rzędu czy
aproksymacja Padé [3, 5]. Ograniczając się do aproksymacji rzędu pierwszego (ze
względu na minimalizacę rzędu transmitancji przekształtnika) zastosowano dwa
typy funkcji aproksymującej rzędu pierwszego w postaci:
e s tk
1
1 st k
(4)
oraz:
e
s tk
1 12 stk
1
1 st
2 k
2 st k
2 stk
(5)
Model częstotliwościowy układów energoelektronicznych z modulacją
Dla aproksymacji zgodnej z wyrażeniem (4):
t 1 sTN
GM ( s) A k
TN s(1 stk )
natomiast dla aproksymacji przedstawionej zależnością (5):
t 2 sTN
GM ( s ) A k
TN s( 2 st k )
213
(6)
(7)
Rys. 5. Charakterystyki amplitudowa i fazowa transmitancji przekształtnika DC/DC
dla modulacji niesymetrycznej prawostronnej (zgodnie z wyrażeniami (3), (6) oraz (7)
Na rysunku 5 przedstawiono charakterystyki częstotliwościowe przekształtnika
dla TN 100 [ s] oraz tk 0,05TN . Widoczne są wszystkie składowe
częstotliwościowe związane z modulacją (przebieg – kolor zielony). Obie
aproksymacje mają cechy filtru dolnoprzepustowego i odzwierciedlają z dobrą
dokładnością składowe częstotliwościowe w zakresie niskich częstotliwości
(istotnych dla układów DC/DC).
W przekształtnikach stosuje się także modulację MSI unipolarną symetryczną
dwustronną, dla której w dziedzinie czasu pojedynczy impuls prostokątny można
przedstawić
jako
f (t ) A1[t (TN tk ) 2] A1[t (TN tk ) 2 tk ] .
Dla
nieskończonego ciągu takich impulsów występujących z okresem TN , transformata
Laplace’a ma postać:
s tk
1
GM ( s ) L [ sM (t )] Ae s(TN tk ) 2 1 e
(8)
s 1 e sTN
Porównując to wyrażenie z postacią (3) można stwierdzić, że charakterystyka modułowa
tego typu modulacji jest taka sama, zmienia się tylko charakterystyka fazowa.
214
Ryszard Porada
Aproksymując wyrażenie (8) przybliżonymi funkcjami (4) i (5) uzyskuje się,
dla aproksymacji zgodnej z wyrażewniem (4):
2t
1 sTN
GM ( s) A k
(9)
TN s(1 stk )[ 2 s (TN tk )]
natomiast dla aproksymacji przedstawionej zależnością (5):
t ( 2 sTN )[ 4 s (TN tk )]
GM ( s) A k
(10)
TN s( 2 stk )[4 s (TN tk )]
Obie te aproksymacje mają podobne cechy jak dla modulacji jednostronnej.
W przypadku przekształtnika DC/AC, jego zadaniem jest przekształcenie
stałego napięcia źródła na napięcie przemienne o regulowanej wartości skutecznej.
Dla przyjętej modulacji MSI unipolarnej niesymetrycznej prawostronnej kształt
napięcia wyjściowego pokazano na rysunku 6.
A
tk
TG 2
TN
t
2TN
TG
A
Rys. 6. Skończony ciąg naprzemiennych impulsów prostokątnych
(modulacja niesymetryczna prawostronna)
Jest to skończony, okresowy ciąg przemiennych impulsów prostokątnych
unipolarnych. Posługując się tą samą metodą jak w przypadku poprzednim, można
znaleźć przybliżoną (ze względu na skończoną liczbę impulsów w okresie TG ), dla
stałego czasu impulsu t k , transmitancję przekształtnika w postaci:
s tk
sTG 2
GM ( s ) L [ sM (t )] A 1 e 1 e sTN
(11)
s
1 e
Aproksymując wyrażenie (11) przybliżonymi funkcjami (4) i (5) uzyskuje się,
dla aproksymacji zgodnie z wyrażeniem (4):
tT
1 sTN
GM ( s) A k G
(12)
TN (1 stk )(2 sTG )
natomiast dla aproksymacji przedstawionej zależnością (5):
tT
(2 sTN )
GM ( s ) A k G
(13)
TN (2 stk )( 4 sTG )
Model częstotliwościowy układów energoelektronicznych z modulacją
215
Rys. 7. Charakterystyki amplitudowa i fazowa transmitancji przekształtnika DC/AC
dla modulacji niesymetrycznej prawostronnej (zgodnie z wyrażeniami (11), (12) oraz (13)
Na rysunku 7 przedstawiono charakterystyki częstotliwościowe przekształtnika
dla TG 20 [ms] , TN 100 [ s] oraz 0,05TN . Widoczne są wszystkie składowe
częstotliwościowe związane z modulacją (przebieg – kolor zielony). Obie
aproksymacje mają cechy filtru dolnoprzepustowego, a aproksymacja Padé rzędu
pierwszego (przebieg – kolor niebieski) odzwierciedla z dobrą dokładnością
składowe częstotliwościowe w zakresie niższych częstotliwości (w pasmie ok.
3,5 kHz przy pierwszym prążku związanym z częstotliwością nośną 10 kHz), które
mają istotne znaczenie dla odbiorników o małych stałych czasowych.
Dla modulacji MSI unipolarnej symetrycznej dwustronnej można podać
wyrażenie na transmitancję przekształtnika w postaci:
s tk
sTG 2
GM ( s ) L [ sM (t )] Ae s(TN tk ) 2 1 e 1 e sTN
(14)
s
1 e
Również w tym przypadku, porównując to wyrażenie z postacią (11) można
stwierdzić, że charakterystyka modułowa tego typu modulacji jest taka sama,
zmienia się jedynie charakterystyka fazowa.
Aproksymując wyrażenie (14) przybliżonymi funkcjami (4) i (5) uzyskuje się,
dla aproksymacji zgodnie z wyrażeniem (4):
2t T
1 sTN
GM ( s) A k G
(15)
TN (1 stk )(2 sTG )[ 2 s(TN tk )]
natomiast dla aproksymacji przedstawionej zależnością (5):
tT
(2 sTN )
[ 4 s(TN t k )]
GM ( s ) A k G
(16)
TN (2 stk )( 4 sTG ) [4 s(TN tk )]
216
Ryszard Porada
Należy wyraźnie zaznaczyć, że uzyskane wyrażenia opisujące właściwości
częstotliwościowe przekształtnika dla przedstawionych wariantów modulacji MSI
są przybliżone. Zawierają jednak istotne cechy modulacji, jak okres nośny, okres
sygnału modulującego czy czas impulsu w okresie nośnym. Szczególnie ten
ostatni, w przypadku generowania sygnału przemiennego o kształcie różnym od
prostokątnego będzie się zmieniał w każdym okresie sygnału nośnego. Wpłynie to
jedynie na ilościową zawartość składowych częstotliwościowych przy zachowaniu
cech jakościowych.
4. PODSUMOWANIE
W pracy zaproponowaną nowy model opisu częstotliwościowego
przeksztatnika jako zmodulowanego źródła napięcia. Pokazano wybrane wyniki
badań porównawczych tradycyjnych i nowo proponowanych aproksymacji.
Uzyskane transmitancje niskich rzędów mogą być wykorzystane do innego niż
klasyczny sposobu doboru transmitancji regulatora, szczególnie w odniesieniu do
sterowania układami energoelektronicznymi z odbiornikami o małych stałych
czasowych w strukturach zamkniętych.
LITERATURA
[1] Brzózka J., Regulatory i układy automatyki. MIKOM, Warszawa 2004.
[2] Byrski W., Obserwacja i sterowanie w systemach dynamicznych. Uczelniane
Wydawnictwa Naukowo-Dydaktyczne AGH, Kraków 2007.
[3] Mędrzycki J.: Technika analogowa i hybrydowa. WNT, Warszawa 1974.
[4] Mohan N.: Power elektronics: John Wiley&Sons, New York 1989.
[5] Szabatin J.: Podstawy teorii sygnałów. WKŁ, Warszawa 2000.
[6] Tunia H., Barlik R.: Teoria przekształtników. Oficyna Wydawnicza Politechniki
Warszawskiej, Warszawa 2003.
FREQUENCY MODEL OF POWER ELECTRONICS SYSTEMS
WITH THE MODULATION
Control of power electronics systems as closed structures creates very large difficulties
due to the presence in the main track a modulated voltage source. One discussed the applied
hitherto methods of the description of the distorter and its frequency properties and also a
new method of the frequency description of power converter as modulated voltage source.
Selected researches results of proposed method of the description of the converter are
presented.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Seweryn MAZURKIEWICZ*
Janusz WALCZAK*
ANALIZA WŁAŚCIWOŚCI
FILTRU PARAMETRYCZNEGO I RZĘDU
W artykule rozpatrzono problem transmisji sygnałów stochastycznych w deterministycznych
układach parametrycznych LTV I rzędu. Wyprowadzono równania modelu filtru w postaci
transmisyjnej i wyznaczono momenty procesów (wartości przeciętne, funkcje korelacji własnej i
wzajemnej) na wejściu i wyjściu filtru. Wyniki zilustrowano przykładami transmisji sygnałów
stochastycznych przez filtry o nieokresowo zmiennych parametrach.
SŁOWA KLUCZOWE: dynamiczne układy stochastyczne, filtr LTV w warunkach
losowych, równania momentów
1. WPROWADZENIE
Analizie zjawisk losowych w układach elektrycznych i elektronicznych
poświęcono wiele prac, w tym monografię [7]. Prace te często dotyczą wyznaczania
różnych charakterystyk probabilistycznych procesów stochastycznych występujących
w układach [1, 2, 3, 4]. W artykule omówiono metodę rozwiązywania losowych
równań różniczkowych pierwszego rzędu o zmiennych w czasie parametrach.
Rozważane równania opisują elektryczne układy dynamiczne pierwszego rzędu.
Wyznaczono wartość oczekiwaną odpowiedzi układu, funkcje korelacji wzajemnej
wymuszenia i odpowiedzi i funkcję korelacji własnej odpowiedzi układu. Pokazano
przykład rozwiązania problemu z dwoma wzmacniaczami operacyjnymi, gdzie
odpowiedzią jest napięcie na wyjściu drugiego wzmacniacza. Postępując w
analogiczny sposób można rozważać inne układy pierwszego rzędu. Artykuł stanowi
kontynuację prac [5, 12] z których pierwsza poświęcona była wyznaczaniu
momentów procesów w układach liniowych n-tego rzędu o stałych współczynnikach
w warunkach losowych, natomiast druga dotyczyła układów liniowych o
współczynnikach będących zmiennymi losowymi.
2. FORMALIZACJA PROBLEMU
Niech dane będzie liniowe równanie różniczkowe pierwszego rzędu o
zmiennych współczynnikach:
__________________________________________
* Politechnika Śląska.
218
Seweryn Mazurkiewicz, Janusz Walczak
(1)
gdzie: X(t) – proces stochastyczny, będący odpowiedzią układu, F(t) – proces
stochastyczny, będący wymuszeniem, a(t) – gładka funkcja deterministyczna, X0 –
losowy lub deterministyczny warunek początkowy.
Rozwiązanie równania (1) dane jest w postaci analitycznej:
(2)
(3)
Rozwiązanie (2) rozumiane jest w sensie średniokwadratowym [9]. Aby
wyznaczyć momenty (wartość oczekiwaną oraz korelacje) odpowiedzi układu
można skorzystać z dwóch metod. Pierwsza polega na zastosowaniu operatora
wartości oczekiwanej do rozwiązania (2). Wtedy momenty określają wzory:
wartość oczekiwana odpowiedzi:
(4)
gdzie: μX(t) = E[X(t)], μX0 = E[X0], μF(t) = E[F(t)].
korelacja wymuszenia i odpowiedzi (przy założeniu, że wymuszenie w każdej
chwili czasu i warunek początkowy są niezależnymi zmiennymi losowymi):
(5)
gdzie: RFX(t) = E[F(t)X(t)], RF(t,τ) = E[F(t)F(τ)].
korelacja odpowiedzi:
(6)
Analiza właściwości filtru parametrycznego I rzędu
219
Druga metoda polega na zastosowaniu operatora wartości oczekiwanej do
bezpośrednio do równania (1) lub do jego zmodyfikowanej wersji (obliczanie
korelacji). Równanie na wartość oczekiwaną ma wtedy postać:
(7)
Aby wyznaczyć korelację wymuszenia oraz odpowiedzi, należy zmodyfikować
równanie (1) do postaci:
(8)
a następnie zastosować operator wartości oczekiwanej:
(9)
W podobny można wyznaczyć autokorelację odpowiedzi:
(10)
Należy zauważyć, że warunek początkowy równania (10) nie jest znany. Można
go wyznaczyć za pomocą pomocniczego równania [5]:
(11)
3. PRZYKŁAD
Niech dany jest obwód pokazany na rys. 1:
Rys. 1. Przykładowy obwód
220
Seweryn Mazurkiewicz, Janusz Walczak
Pojemność C(t) jest funkcją czasu. W takim wypadku równanie wiążące prąd
kondensatora z jego napięciem określone jest następująco (prąd i napięcie jest
procesem stochastycznym drugiego rzędu):
(12)
Uwzględniając strukturę obwodu z rys. 1 oraz równanie (12), wymuszenie F(t)
związane jest z odpowiedzią X(t) następującym równaniem:
(13)
gdzie:
(14)
(15)
2,5
2
C(t)
1,5
1
0,5
0
0
1
2
3
4
5
t
Rys. 2. Funkcja C(t)
Dla uproszczenia niech:
(16)
(17)
(18)
Analiza właściwości filtru parametrycznego I rzędu
221
(19)
dla t>0. Proces N(t) jest białym szumem o funkcji autokorelacji równej:
(20)
Stosując jedną z omówionych w rozdziale 2 metod można wyznaczyć:
wartość oczekiwaną odpowiedzi:
(21)
korelację wymuszenia oraz odpowiedzi:
(22)
Rys. 3. Funkcja korelacji wzajemnej wymuszenia i odpowiedzi układu
autokorelację odpowiedzi:
(23)
222
Seweryn Mazurkiewicz, Janusz Walczak
Rys. 4. Funkcja autokorelacji odpowiedzi układu
4. PODSUMOWANIE
W artykule opisano metodę wyznaczania wartości oczekiwanych oraz funkcji
korelacji procesów w liniowych układach deterministycznych o zmiennych w czasie
parametrach LTV, przy wymuszeniu będącym procesem stochastycznym. Rozważono
układy pierwszego rzędu w których odpowiedź układu (rozwiązanie) modelu
deterministycznego dane jest w postaci analitycznej. Rozwiązanie analityczne
wykorzystano do znalezienia momentów odpowiedzi układu modelu losowego.
LITERATURA
[1]
[2]
[3]
[4]
Kadlecova E., Kubasek R., Kolarova E.: RL Circuits Modeling with Noisy
Parameters, Conf. on Applied Electronics, Pilsen 6-7 Sept. 2006, pp. 217-220.
Kolarova E.: An Application of Stochastic Integral Equations to Electrical
Networks, Acta Electrotechnica et Informatica, Vol. 8, No. 3, 2008, pp. 14–17.
Kolarova E.: Modeling RL Electrical Circuits by Stochastic Differential Equations,
Int. Conf. EUROCON, November 22–24, Belgrade, Serbia 2005, pp. 1236–1238.
Kolarova E.: Statistical Estimates of Stochastic Solutions of RL Electrical Circuit,
IEEE Int. Conf. of Industrial Technology, ICIT 2006, pp. 2546–2550.
Analiza właściwości filtru parametrycznego I rzędu
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
223
Mazurkiewicz S., Walczak J.: Linear dynamical systems of the n-th order in random
conditions. Computional Problems of Electrical Engineering, Ukraine 2014 (w
druku).
Pugacev V. S., Sinicin I. N.: Stochastic Differential Systems, Science, Moscow 1985
(in Russian).
Skowronek K.: Obwody elektryczne w ujęciu stochastycznym, Monografia. Wyd.
Pol. Pozn., Poznań 2011.
Skowronek K.: Linia o losowej indukcyjności, materiały konferencyjne XXXVI ICSPET 2013, pp. 25-26.
Socha L.: Równania momentów w stochastycznych układach dynamicznych, PWN,
Warszawa 1993.
Soong T. T.: Random Differential Equations in Science and Engineering, Math. in
Science and Eng., Vol. 103, Academic Press, New York 1973.
Swiesznikow A. A.: Podstawowe metody funkcji losowych, WNT, Warszawa 1965.
Walczak J., Mazurkiewicz S.: Random models of coupled inductors, Monograph:
“Computer Applications in Electrical Engineering 2014”, (w druku).
PROPERTIES OF THE LTV FILTER OF THE FIRST ORDER
In this article the first and the second order moments for random models of LTV filter
were determined. It was determined expected value and correlation function of the
response of the filter. The results have been illustrated by examples.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Rafał STĘPIEŃ*
WYKORZYSTANIE PAKIETU TESTÓW
STATYSTYCZNYCH NIST STS 2.1.1 DO TESTOWANIA
SEKWENCJI GENERATORÓW DLFSR
W artykule opisano wyniki testów statystycznych sekwencji wyjściowych generatora
pseudolosowego zrealizowanego na rejestrze przesuwnym i dynamicznym liniowym
sprzężeniu zwrotnym (ang. Dynamic Linear Feedback Shift Register - DLFSR). Do analizy
sekwencji wykorzystano pakiet testów statystycznych NIST STS 2.1.1. Ten pakiet testów
statystycznych posłużył do przebadania dwóch sekwencji wyjściowych dwóch różnych
generatorów DLFSR. Uzyskane wyniki przedstawiono w formie wykresu oraz omówiono.
SŁOWA KLUCZOWE: sygnały pseudolosowe, generatory DLFSR, testy statystyczne, STS-2.1.1
1. WSTĘP
Generatory ciągów pseudolosowych znajdują zastosowanie w wielu
dziedzinach techniki [1]. Są niezbędnym elementem algorytmów statystycznych,
znajdują zastosowania w kryptografii oraz w telekomunikacji [1]. Jedną z klas
generatorów sygnałów pseudolosowych są generatory DLFSR [2]. Generator
DLFSR ma zmienną w czasie strukturę pętli sprzężenia zwrotnego (w
przeciwieństwie do generatorów NLFSR oraz LFSR, które mają statyczną w czasie
pętlę sprzężenia zwrotnego). Ta cecha generatora DLFSR umożliwia znaczne
wydłużenie okresu generowanej sekwencji pseudolosowej oraz poprawienie jej
parametrów statystycznych. Dodatkowe szczegóły dotyczące budowy oraz opisu
generatorów DLFSR można znaleźć w [2, 3].
2. PAKIET TESTÓW STATYSTYCZNYCH NIST STS 2.1.1
Sekwencje generowane przez generatory z rejestrami przesuwnymi nie są
sekwencjami w pełni losowymi. Mają one skończoną długość, a przez co są
okresowo powtarzalne. Także każdy kolejny bit wyjściowy sekwencji generatora
zbudowanego na rejestrze przesuwnym jest uzyskiwany w pełni deterministyczny
sposób, określony algorytmem generacji sekwencji pseudolosowej [1, 4, 5, 6].
_______________________________________
* Politechnika Śląska.
226
Rafał Stępień
Sekwencja pseudolosowa może przyjmować bardziej lub mniej dokładnie
statystyczne cechy sygnału losowego. W celu pomiaru podobieństwa sekwencji
pseudolosowej do sekwencji losowej stosuje się analizę statystyczną za pomocą
różnych narzędzi, takich jak np. testy statystyczne lub testy indywidualne, które
stwierdzają podobieństwo statystyczne sekwencji pseudolosowej do sekwencji
losowej [7, 8, 9, 10, 11].
Jednym z pakietów testów statystycznych, służącym do analizy sekwencji
pseudolosowych jest pakiet STS-2.1.1 autorstwa National Institute of Standard and
Technology (NIST). Pakiet ten jest jednym z najważniejszych narzędzi do
określania bezpieczeństwa informatycznego dotyczącego generacji ciągów
losowych i pseudolosowych.
Do podstawowych zalet pakietu NIST zalicza się:
dostępne kody źródłowe oraz gotowa aplikacja dla środowiska Windows,
duża ilość testów statystycznych,
dostępna dokładna dokumentacja oraz sposób interpretacji wyników.
Do podstawowych wad pakietu NIST zalicza się:
utrudnioną analizę porównawczą dwóch zestawów wyników,
sposób zapisu danych wyjściowy pakietu (wynik każdego testu do osobnego
pliku),
bardzo długi czas testowania (w zależności od długości sekwencji).
Pakiet NIST składa się z 15 testów statystycznych. Dostępna jest dokładna
dokumentacja [11] dotycząca działania pakietu oraz opisu matematycznego
zastosowanych testów statystycznych. Dostępne są również kody źródłowe pakietu
w języku C oraz gotowa aplikacja przeznaczona dla użytkowników systemu
Windows [12].
Pakiet NIST umożliwia testowanie sekwencji zapisanej w pliku dyskowym oraz
jednego z dziewięciu zaimplementowanych generatorów. W tym artykule
wykorzystano wyłącznie możliwość analizy sekwencji zapisanych w plikach
dyskowych.
Autorzy pakietu NIST zalecają, aby sekwencja wejściowa miała długość
mieszczącą się pomiędzy 103 a 107 bitów. Podczas przeprowadzania testów
zaobserwowano, że w przypadku pliku wejściowego o rozmiarze 110 MB (32 bitowa
sekwencja o długości 28672000 słów) pakiet NIST nie jest w stanie wykonać testu
analizy widmowej DFT. W takich przypadkach nie zmniejszano pliku z sekwencją
wyjściową tylko ustalano przy uruchomieniu pakietu z linii poleceń rozmiar sekwencji
na 107 bitów. Pozostałe testy były wykonywane prawidłowo.
Zestaw testów statystycznych pakietu NIST oraz przypisane im numery testów,
występujące na rysunkach 1 – 4, przedstawiono w tabeli 1.
Pakiet NIST wymaga znacznie dłuższego czasu przeznaczonego na analizę
takiego samego pliku co np. pakiet DIEHARD [3]. Analiza pliku 110 MB na
procesorze Intel Core i5 zajmuje około 5 minut.
Wykorzystanie pakietu testów statystycznych NIST STS 2.1.1. do testowania …
227
Tabela 1. Testy pakietu NIST oraz odpowiadające im numery
Numer testu
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Nazwa testu
Test entropii
Blokowy test częstości
Test skumulowanych sum
Test analizy widmowej DFT
Test częstości
Test złożoności liniowej
Test najdłuższej sekwencji
Test niezachodzących na siebie wzorców
Test zachodzących na siebie wzorców
Test losowych wycieczek
Alternatywny test losowych wycieczek
Test rzędu macierzy
Test sekwencji
Test częstości wielobitowych wzorców
Test kompresji
Pakiet testów NIST zwraca wyniki każdego z testów statystycznych jako tzw.
p-wartości (nazywane również prawdopodobieństwem testowym) [7, 11]. Dany
test statystyczny uznaje się za zdany, jeżeli p-wartości danego testu statystycznego
są większe niż poziom istotności testu. W przypadku pakietu NIST w wersji STS2.1.1 poziom istotności został ustalony na wartość domyślną α = 0,01.
Wyniki wszystkich testów statystycznych zapisywane są do plików tekstowych
w katalogu pakietu NIST. W celu ich dalszej analizy napisano oprogramowanie,
które pobiera wszystkie p-wartości zapisane w plikach tekstowych i zwraca je w
formie dogodnej do importu w arkuszu kalkulacyjnym.
3. WYNIKI BADAŃ GENERATORA DLFSR
Przebadano dwa 32-bitowe generatory DLFSR opisane wielomianami
pierwotnymi oraz funkcjami przełączającymi zamieszczonymi w tabeli 2. Długość
badanych sekwencji wynosiła 110 MB. Generatory były zaimplementowane
programowo w języku Borland Delphi 7.0.
Literą c oznaczono numer cyklu zegarowego. Jeżeli spełniony jest jeden z
warunków określony wartością funkcji przełączającej to funkcja sprzężenia
zwrotnego generatora pracuje z zestawem odczepów określonym wielomianem
(L2(x)). W innym przypadku funkcja sprzężenia zwrotnego wykorzystuje odczepy
opisane wielomianem (L1(x)). Stałe występujące w obu funkcjach przełączających
228
Rafał Stępień
zostały dobrane doświadczalnie [2, 3]. Na rysunku 1 przedstawiono wyniki testów
statystycznych sekwencji pseudolosowej generatora DLFSR1.
Tabela 2. Parametry generatorów DLFSR
Funkcja
przełączająca
Wielomiany
sprzężenia
zwrotnego
Generator DLFSR1
Generator DLFSR2
(c mod 15)=0 lub (c mod 63)=0
(c mod 15)=0 lub (c mod 64)=0
L1 ( x) x 32 x 31 x 26 x18 1
L2 ( x ) x 32 x 19 x 18 x 13 1
Sekwencja generatora DLFSR1 spełnia prawie wszystkie testy pakietu NIST,
co potwierdza wysokie parametry statystyczne wygenerowanej sekwencji testowej.
Jedna wartość testu numer 8 (test niezachodzących na siebie wzorców) leży
poniżej linii określającej poziom istotności testu równy α = 0,01, por. rysunek 2.
Sekwencja nie zdaje tego testu dla jednego z wzorców generowanych przez pakiet
testów statystycznych.
W celu dokładniejszej analizy należy przeprowadzić testy kilku innych
sekwencji wygenerowanych przez ten sam generator. Każda kolejna sekwencja
powinna być wygenerowana od innego warunku początkowego rejestru
przesuwnego generatora. Można również wykorzystać inne testy statystyczne, np.
DIEHARD lub ENT [3], [7] w celu weryfikacji parametrów statystycznych
generatora.
1
0,9
0,8
p-wartość
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Numer testu
Rys. 1. Wykres p-wartości uzyskanych z analizy sekwencji generatora DLFSR1
Wykorzystanie pakietu testów statystycznych NIST STS 2.1.1. do testowania …
229
0,1
0,09
0,08
p-wartość
0,07
0,06
0,05
0,04
0,03
0,02
0,01
0
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Numer testu
Rys. 2. Dolny fragment wykresu p-wartości uzyskanych z analizy sekwencji generatora DLFSR1
Na rysunku 3 przedstawiono wyniki testów statystycznych sekwencji
generowanej przez generator DLFSR2. Sekwencja generatora DLFSR2 zdaje
wszystkie testy statystyczne pakietu NIST. Tak jak w poprzednim przypadku
wątpliwości może budzić wynik testu numer 8 (test niezachodzących na siebie
wzorców). Jedna z wartości uzyskiwana w wyniku testowania leży w pobliżu
prostej określającej poziom istotności α = 0,01. Na rysunku 4 przedstawiono dolny
fragment wyników pakietu NIST. Z rysunku 4 wynika, że najniższa wartość 8 testu
leży poniżej linii poziomu istotności testu, jej dokładna wartość to 0,009623.
Wynik tego testu należy uznać za lepszy niż w przypadku sekwencji generatora
DLFSR1, a o akceptacji konstrukcji generatora DLFSR, ze zmierzonymi
parametrami statystycznymi, powinien zadecydować konstruktor.
1
0,9
0,8
p-wartość
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Numer testu
Rys. 3. Wykres p-wartości uzyskanych z analizy sekwencji generatora DLFSR2
230
Rafał Stępień
0,02
0,018
0,016
p-wartość
0,014
0,012
0,01
0,008
0,006
0,004
0,002
0
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Numer testu
Rys. 4. Dolny fragment wykresu p-wartości uzyskanych z analizy sekwencji generatora DLFSR2
Wyniki analizy sekwencji pseudolosowych generatorów DLFSR wskazują, że
spełniają one prawie wszystkie testy statystyczne pakietu NIST STS 2.1.1. W celu
pełnej analizy oraz dopuszczenia generatora DLFSR do zastosowań
kryptograficznych konieczna jest dokładniejsza analiza statystyczna w innych
testach statystycznych np. DIEHARD [7] oraz porównanie uzyskanych wyników z
innymi typami generatorów ciągów pseudolosowych np. NLFSR lub LFSR [3].
4. PODSUMOWANIE
W artykule opisano wykorzystanie pakietu testów statystycznych STS 2.1.1 do
testowania sekwencji pseudolosowych generowanych przez generatory z
dynamicznym liniowym sprzężeniem zwrotnym – DLFSR. Krótko omówiono
budowę generatorów DLFSR oraz przeprowadzono dokładniejsze omówienie
wykorzystanego w artykule pakietu testów statystycznych. Przebadano sekwencje
dwóch 32-bitowych programowych generatorów DLFSR. Uzyskane wyniki
omówiono i przedstawiono w formie wykresów. Z uzyskanych wyników
wyciągnięto wnioski.
LITERATURA
[1]
[2]
[3]
Schneier B.: Kryptografia dla praktyków, Vol. 2, WNT, Warszawa 2002.
Stępień R., Walczak J.: Application of the DLFSR generators in spread spectrum
communication, 19th International Conference “MIXDES Design of Integrated
Circuits and Systems” ,MIXDES-2012, Warszawa, maj 2012, pp:555-558.
Stępień R., Walczak J.: Comparative Analysis of Pseudo Random Signals of the
LFSR and DLFSR Generators, proceedings of 20th International Conference
“MIXED Design of Integrated Circuits and Systems”, MIXDES-2013, Gdynia,
czerwiec 2013, pp: 598-602.
Wykorzystanie pakietu testów statystycznych NIST STS 2.1.1. do testowania …
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
231
Patidar V, Sud K,K.: A Novel Pseudo Random Bit Generator Based on Chaotic
Standard Map and its Testing, Electronic Journal of Theoretical Physics, No.20,
2009, pp: 327–344.
Park S.K., Miller K.W. : Random number generators: good ones are hard to find,
Communications of the ACM, Volume 31, Issue 10, October 1988, pp:1192 – 1201.
Haag M.: Introduction to random signal and processes, Connections Project, 2005.
Zwierko A.: Testowanie generatorów pseudolosowych – wybrane programowe
pakiety testów statystycznych, VII Krajowa Konferencja Zastosowań Kryptografii,
Warszawa, maj 2003, ss:1-20.
Soto J.: Statistical Testing of Random Number Generators, National Institute of
Standards & Technology, Proceedings of the 22nd National Information Systems
Security Conference, 10/99, pp:1-12.
Rashidah K., Maarof M.A.: Randomness Analysis of Pseudorandom Bit Sequences,
International Conference on Computer Engineering and Applications, IPCSIT vol.2
IACSIT Press, Singapore, 2011, pp:390-394.
Kotulski Z.: Generatory liczb losowych: algorytmy, testowanie, zastosowania,
Matematyka Stosowana 2, 2001, ss:1-9.
Rukhin A i inni, A Statistical Test Suite for Random and Pseudorandom Number
Generators for Cryptographic Applications, National Institute of Standards and
Technology, rev 1a, april 2010.
Strona internetowa pakietu STS 2.1.1
http://csrc.nist.gov/groups/ST/toolkit/rng/documentation_software.html
APPLICATION OF THE STATISTICAL TEST SUITE STS 2.1.1 TO TESTING
OF THE DLFSR SEQUENCES
The following article provides a description of a statistical tests results of the dynamic
linear feedback shift register generator - DLFSR. The generators’ sequences were analyzed
in the NIST statistical test suite STS 2.1.1. This test suite was used to analyze two pseudo
random sequences generated by the two different 32 bits DLFSR generators. Obtained
results were discussed and shown in a form of diagrams.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Adam TOMASZUK*
MICROCONTROLLER BASED STEP-UP DC-DC
CONVERTER DRIVER WITH MPPT ALGORITHM
IMPLEMENATION
Energy efficiency is one of most critical parameters in photovoltaic (PV) systems.
Overall PV system efficiency improvement may be achieved by such means as topological
changes, new generations of transistor switches and/or planar magnetic components use.
But on the other hand whole system must follow the wheather changes such as solar energy
delivery variation due to cloud shading as well as temperature fluctuations. In such
conditions a driver should dynamically track maximum power point (MPPT) of a PV array.
For the purposes of better understanding PV array performance the paper shows MatLab
simulation of 3.2 kWp PV array. The driver discussed works with a range of different step
up DC-DC converter topologies such as bridge based topologies as well as interleaved
ones. The ASCII protocol which can be implemented in PC application is responsible for
working parameters settings carrying and output data logging as well as current software
status check. The paper presents practical implementation of the driver as a part of larger
PV system where the interleaved DC-DC converter works with 3.2 kWp PV array of ten
PV modules connected in parallel. Described MPPT algorithm takes advantage of modified
Perturb and Observe (P&O) method. Presented are microcontroller hardware resources
utilization, functional software architecture and developped MPPT algorithm which
performance is shown on the plot.
KEYWORDS: MPPT algorithms, photovoltaic systems
1. INTRODUCTION
Photovoltaic (PV) energy has become more apparent for last years in such areas
as domestic or agricultural applications. It seems to be a good solution for remote
localizations with no electricity grid access. PV energy generation neither brings a
pollution into the environment nor generates unwanted acoustic noise. Yet PV
systems are not commonly used because of relatively high price in comparison to
expected benefits. The cost of PV modules shares the majority of overall PV
system price. However over a few recent years the price of PV modules constantly
drops down it is still high enough to be commonly used.
__________________________________________
* Bialystok University of Technology.
234
Adam Tomaszuk
The new semiconductor technologies have slightly improve PV cells efficiency
which reach up to 19%. Such relatively low amount of energy which comes from solar
radiation should be carefully converted and transferred to the load. Therefore the
converter topology and its driving method should assure maximum efficiency.
Recently many power semiconductor technologies have been introduced among which
silicon carbide (SiC) devices seem most suitable to aim at that target. Moreover robust
maximum power point (MPPT) driving algorithm should be implemented within the
driver to follow the solar radiation and temperature variations.
2. SYSTEM TOPOLOGY
PV energy system is depicted on Fig. 1. PV array consists of the array of ten
PV modules 320Wp each in parallel which makes 3.2 kWp of total peak power.
ower is delivered to the interleaved step-up DC-DC converter driven accordingly
to the algorithm implemented. The driver is based upon STM32F107
microcontroller which drives up to 8 phases of interleaved step-up DC-DC
converter. PC computer application controls over RS-232 interface the work of the
driver as well as receives the measurement data and driver status upon the request.
Fig. 1. Simplified PV energy system diagram (the inset shows 3.2 kWp PV array installed on the roof
of Electrical Engineering Faculty building)
Measurement front-end delivers to the driver’s ADC such parameters as
instantaneous panel current, voltage and power calculated as product of
multiplication of both parameters. Additionally LED display is available for the
test purposes.
Microcontroller based step-up DC-DC converter driver with MPPT algorithm …
235
3. PV ARRAY
3.1 PV array description
The PV array consists of ten KYOCERA KD320GH-4YB PV modules
connected in parallel. Total peak current generated in the panel IPV reaches over 80A
at the voltage VPV in the range of 40 V to 60 V. The power generated in PV module
strongly depends on environmental conditions such as solar radiation S [W/m2], and
is affected by ambient temperature T. Because of nonlinear I-V characteristic PV
module cannot be considered neither as voltage nor current source.
Solar module manufacturers specify PV module parameters in Standard Test
Conditions (STC) which are T = 25ºC and S = 1000 [W/m2] at perpendicular
direction of solar radiation. Table 1 collates main KYOCERA KD320GH-4YB
module parameters [1].
Table 1. Specification of KYOCERA KD320GH-4YB module (STC)
No
1.
2.
3.
4.
5.
6.
7.
8.
Parameter
Peak power
Open circuit voltage
Short circuit current
Maximum power point voltage
Maximum power point current
Open circuit voltage temperature coef.
Short circuit current temperature coef.
Number of PV cells in series x parallel
Designation [unit]
Pmax [kWp]
Voc [V]
Isc [A]
Vpm [V]
Ipm [A]
µV [V/ ºC]
µA [V/ ºC]
Ns x Np
Value
320
49.5
8.60
40.1
7.99
-0.178
5.16•10-3
20 x 4
3.2 MatLab Simulation of PV array performance
Single PV cell that a PV module is composed of can be presented as diode
model depicted on Fig. 2 [2]. For the sake of I-V and P-V characteristics
generation serial and parallel cell resistances Rs and Rp (Fig. 2) were calculated
22.4mΩ and 95Ω respectively.
Fig. 2. Single PV cell model
236
Adam Tomaszuk
For PV array composed of 10 parallel modules the operation equation for I-V
characteristic can be formulated as:
q
I PV 10I S 10{I sat [e AKT
( VPV R SS I PV )
1]
VPV R SS I PV
}
R pp
(1)
where IS is the current generated under given solar radiation, Isat is diode saturation
current, q is electron charge, K is Boltzman’s constant, A is diode quality factor
(usually between 1 and 2, assumed 1 in the simulation) and T is ambient
temperature. Rpp and Rss are total parallel and series resistances seen at PV array
output which were derived from Rp and Rs according to parameter 8 from Table 1.
Fig. 3 and Fig. 4 show simulation results and reveal variance of PV module
work parameters vs. environmental condition changes i.e. solar radiation S within
the range of 1000W/m2 down to 400 W/m2 and ambient temperatures T of 5ºC,
25ºC and 55ºC. For given ranges of S and T maximum power point (MPP) of P-V
curves (Fig. 4) varies across the array voltage VPV from 33 V up to 53 V. To
maximize yield of energy from the PV array appropriate MPPT algorithm should
be implemented in converter driver.
Fig. 3. The PV array I-V plot in different environmental conditions S and T
Fig. 4. The PV array P-V plot in different environmental conditions S and T
Microcontroller based step-up DC-DC converter driver with MPPT algorithm …
237
4. STEP-UP INTERLEAVED DC-DC CONVERTER
A number of high efficiency step-up DC-DC converter topologies [3] can be
utilized to boost PV array voltage VPV up to the level of Vbus (Fig. 1) above 350 V.
Therefore only the topologies with the capacity to gain the voltage 9 times and
above should be considered in to work with PV modules connected in parallel.
The common thing among different step-up DC-DC converter topologies is that
the voltage gain depends on driving signal duty cycle D. Converter input current
which is effectively PV array output current IPV rises with duty cycle increasing. In
that manner by adjusting duty cycle D a step-up DC-DC converter is able to
extract the energy from the PV array following the MPP changes which vary
dynamically with environmental parameter changes.
5. STEP-UP DC-DC CONVERTER DRIVER
The driver consists of microcontroller based logic circuitry and optocouple
separated power stage which consists of number of channels each driving
individual transistor designed to drive commonly used step-up DC-DC converter
topologies in hard-switched mode. Microcontroller STM32F107 is equipped in
such peripherals as ADC, UART port, timers and i/o lines which were
accommodated to build the driver upon. It is capable to generate PWM pulses
which is control signal of MPPT. Table 2 collates key parameters of the driver and
Fig. 5 shows examples of available driving strategies.
Table 2. Key parameters of step-up DC-DC converter driver
No
1.
2.
3.
4.
Parameter
Signal frequency
Duty cycle /step
Max. number of phases (interleaved)
Max. number of phases (bridge)
Designation [unit]
F[kHz]
D[%]
Ni
Nb
Value
15 to 55
8 to 92 /1
8
2
Fig. 5. Driving signals of 3-phase interleaved a), and bridge b) step-up DC-DC converter topologies.
In both cases duty cycles of driving signal D are 66% of driving signal period T
238
Adam Tomaszuk
Fig. 6. Step-up DC-DC Converter Driver Software Layers
The software developped in object oriented C is divided into 3 functional
layers. The peripheral driver layer is responsible for peripheral initialization and
data or signal handling. Interface layer consists of task multiplexer (MUX) and
command parser which recognizes ASCII protocol commands. Application layer
secures software integrity and handles error events as well as releases the
commands to “lower” layers (tier 1). Basic measurements such as several
periodical sequences of voltage and current readouts as well as associated statistics
are available (tier 2). Different MPPT algorithms which utilize pre-configured
measurements from tier 2 can be implemented at the application layer into such
software structure.
5. MPPT ALGORITHM
Many MPPT algorithms have been described so far [4]. P&O algorithm is the
easiest one to implement and is most commonly used. The major disadvantage of
that approach is that perturbation of duty cycle causes PV array to work round
MPP not reaching maximum power. Proposed algorithm implemented in the
driver utilizes full P-V curve estimation. Individual measurement (t = 0.33 s)
consists of three power calculations at three different duty cycles: Dk, Dk+ΔD and
Microcontroller based step-up DC-DC converter driver with MPPT algorithm …
239
Dk–ΔD (Fig. 7). Algorithm utilizes P-V curve slope calculation and automatic ΔD
correction to maintain fast tracking speed.
Fig. 7. MPPT algorithm diagram
Fig. 8 shows IPV, VPV measurements results, duty cycle values and calculated
instantaneous PV array power PPV. The driver worked with 5-phase interleaved
step-up DC-DC converter. Developed MPPT algorithm tracks MPP following
changes of working conditions of the PV array. It maximizes PV array output
power delivered to the system.
Fig. 8. MPPT algorithm performance plot, PPV at the range of around 2.3 kW to 3.2 kW
240
Adam Tomaszuk
6. CONCLUSION
The I-V and P-V characteristics have been discussed to bring the understanding
of performance of 3.2kWp PV array and to draw the inputs to design MPPT
system. The microcontroller used to build the driver has all the peripherals needed
to acommodate analog signal measurement as well as PWM signal generation. The
driver as well as step-up DC-DC converter were optimally designed and laboratory
tested. Proposed MPPT algorithm achieved fast tracking speed maximizing PV
array output power. Laboratory tests proved that whole PV system containing PV
array, interleaved step-up DC-DC converter and the driver maintained high power
efficiency.
This work was supported by Bialystok University of Technology,
Faculty of Electrical Engineering as a research project No W/WE/15/2013
REFERENCES
[1] Kyocera KD P Series family specification rev. 421212, Kyocera Solar, Inc.
[2] Sera D., Teodorescu R., Rodrigues P. „PV panel model based on datasheet values”,
IEEE International Symposium on Industrial Electronics, (2007).
[3] Tomaszuk A., Krupa A.: “High Efficiency High Step-up DC-DC Converters –
Review“ Bulletin of The Polish Academy of Sciences, Technical Sciences, Vol. 59,
No. 4, (2011).
[4] Jain S., Agarval V. „Comparison of the performance of maximum power point
tracking schemes applied to single-stage grid-connected photovoltaic systems”, IET
Electrical Power Application, 1, (5), pp. 753–762 (2007).
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Mikołaj KSIĄŻKIEWICZ*
BADANIA SYMULACYJNE PROSTOWNIKA
PÓŁSTEROWANEGO
W pracy przedstawiono wyniki badań symulacyjnych prostownika półsterowanego,
tworzącego wraz ze stabilizatorem prądu źródło prądowe. Symulacje układu wykonano
w programie PSpice, wyniki badań dotyczą przebiegów i wartości napięcia na wyjściu
prostownika. Zaprezentowano również schemat blokowy źródła prądowego, którego
jednym z elementów jest symulowany układ.
SŁOWA KLUCZOWE: prostownik, półsterowany, symulacja, PSpice
1. WPROWADZENIE
W praktycznych rozwiązaniach realizacja układu źródła prądu polega na
zbudowaniu obwodu, który dostosowuje napięcie na odbiorniku tak, aby płynął
przez niego zadany prąd. Wadą wielu rozwiązań jest to, że niewykorzystane
napięcie (nadwyżka napięcia) odkłada się na elemencie aktywnym stabilizatora
prądu (często używanym elementem są tranzystory), powodując straty mocy
proporcjonalne do płynącego prądu i napięcia na stabilizatorze. W przypadku gdy
zwiera się źródło prądu, cała jego moc wytracana jest w jego stabilizatorze prądu.
Rozwiązaniem byłoby zasilanie stabilizatora z regulowanego źródła napięcia, które
będzie redukować nadwyżkę napięcia do wymaganego minimum.
Napięcie potrzebne do zasilania stabilizatora prądu nie musi być stabilizowane.
Przykładowym rozwiązaniem układu zasilającego stabilizator, dającego możliwość
regulacji wartości średniej napięcia, jest prostownik półsterowany, sterowany
fazowo wraz z pojemnościowym filtrem wygładzającym. Zaletą tego rozwiązania
jest niski koszt, duże możliwości skalowania (schemat ideowy dla dużych i małych
prądów jest identyczny).
W pracy przedstawiono wyniki badań symulacyjnych prostownika
półsterowanego, który jest elementem pomocniczym źródła prądowego,
wykonanych w programie PSpice (źródło zdolne wygenerować prąd o wartości
12,5 A i zasilić odbiornik o mocy 300 W). Celem badań jest zweryfikowanie
poprawności działania prostownika poprzez analizę przebiegów czasowych napięć
i prądów występujących w układzie. Wnioski dotyczą poprawności działania,
__________________________________________
* Politechnika Poznańska.
242
Mikołaj Książkiewicz
możliwości regulowania wartości napięcia oraz realizowalności praktycznej
badanego układu.
2. SCHEMAT SYMULOWANEGO UKŁADU PROSTOWNIKA
PÓŁSTEROWANEGO
Na rysunku 1 przedstawiono schemat symulowanego w programie PSpice
prostownika półsterowanego. Schemat ideowy został wykonany na bazie
klasycznego prostownika półsterowanego opisanego w [1]. Do przygotowania
obiektu badań oraz ustawienia parametrów symulacji korzystano z [2, 3, 4].
Rys. 1. Schemat symulowanego układu prostownika półsterowanego
Poszczególne symbole oznaczają:
V1 – źródło napięcia sinusoidalnego (Um = 50 V; f = 50 Hz),
X1, X2 – tyrystory mostka prostowniczego,
D1, D2 – diody mostka prostowniczego,
C1 – kondensator wygładzający,
Robc – rezystancja obciążenia,
DSTM1 – cyfrowy sygnał sterujący,
D3, D4 – diody zabezpieczające przed podaniem ujemnego impulsu na bramki
tyrystorów,
R1, R2, C2, C3 – elementy kształtujące impuls załączający,
V2, V3, Sw1, Sw2 – elementy służące do załączania triaków (inną możliwością
jest zastąpienie traika przez optotriak i sterowanie prądem diody świecącej).
Badania symulacyjne prostownika półsterowanego
243
3. WYNIKI BADAŃ SYMULACYJNYCH PROSTOWNIKA
PÓŁSTEROWANEGO
Dla schematu jak na rys. 1 i parametrów: Robc = 8 Ω; C1 = 10 mF; wypełnienie
50 %, wyznaczono na podstawie symulacji przebiegi czasowe (stan ustalony):
napięcia zasilania (V1), napięcia obciążenia (Robc), prądów łączników (tyrystorów
X1 i X2), sygnału sterującego (DSTM1), które przedstawiono na rys. 2.
Rys. 2. Przebiegi czasowe: napięcia zasilania (V1), napięcia obciążenia (U_Robc), prądów łączników
(tyrystorów X1 i X2), sygnału sterującego DSTM1; wypełnienie 50 %
Następna symulacja dotyczy układu jak powyżej z wypełnieniem 25 %.
Rozpatrywane przebiegi przedstawiono na rys. 3.
Tabela 1. zawiera zestawienie wartości minimalnych, maksymalnych i średnich
napięcia odbiornika (U_Robc) dla przypadków wypełnienia 50 % i 25 %.
Tabela 1. Zestawienie wartości napięć U_Robc dla różnych wartości wypełnienia
Napięcie U_Robc:
Minimalne [V]
Maksymalne [V]
Średnie [V]
Wypełnienie 50 %
33,348
36,803
34,802
Wypełnienie 25 %
16,789
18,756
17,788
Z porównania dwóch przypadków dla wypełnienia 50 % i 25 % wynika, że
badany układ pozwala na regulacje wartości średniej napięcia na odbiorniku.
Amplituda tętnień zależy od zastosowanej pojemności wygładzającej oraz prądu
obciążenia. W przypadku zastosowania tego układu do zasilania stabilizatora prądu
wartość tętnień powinna być dostosowana do rezystancji wewnętrznej stabilizatora,
która odzwierciedla wpływ zmian napięcia na stabilizatorze na wartość
generowanego prądu.
244
Mikołaj Książkiewicz
Rys. 3. Przebiegi czasowe: napięcia zasilania (V1), napięcia obciążenia (U_Robc), prądów łączników
(tyrystorów X1 i X2), sygnału sterującego DSTM1; wypełnienie 25 %
4. SCHEMAT BLOKOWY STABILNEGO ŹRÓDŁA PRĄDOWEGO
Na rysunku 4 przedstawiono schemat blokowy stabilnego źródła prądowego, którego
jednym z bloków jest badany prostownik półsterowany. Główną część – element
wykonawczy stanowi stabilizator prądu, wykonany jako układ hybrydowy z
tranzystorami MOSFET, polaryzowanymi przez wzmacniacz operacyjny. Transformator
sieciowy wraz z zasilaczem stabilizowanym i prostownikiem półsterowanym dostarczają
energię elektryczną o odpowiednich parametrach napięciowych do wszystkich
pozostałych części urządzenia. Napięcia stabilizowane potrzebne są do zasilenia układów
scalonych, wyświetlacza, klawiatury oraz wentylatorów.
Napięcie niestabilizowane z prostownika półsterowanego służy do zasilania
odbiornika, w którego torze prądowym znajduje się stabilizator prądu. Mikrokontroler
wraz z peryferiami w postaci przetworników A/C i C/A tworzą układ sterowania, który
odpowiada za kontrolę pozostałych bloków i wymianę informacji z użytkownikiem
urządzenia za pośrednictwem klawiatury i wyświetlacza alfanumerycznego. Dodatkowo
istnieje możliwość (po odpowiednim zaprogramowania mikrokontrolera) komunikacji z
urządzeniem wykorzystując komputer wyposażony w interfejs RS-232.
Rys. 4. Schemat blokowy stabilnego źródła prądowego
Badania symulacyjne prostownika półsterowanego
245
5. UWAGI KOŃCOWE
Badania symulacyjne potwierdziły poprawność działania układu prostownika
półsterowanego. Pozwala on na generację regulowanego napięcia stałego,
niestabilizowanego potrzebnego do zasilenia toru wysokoprądowego w stabilnym
źródle prądu, dla którego był projektowany. Istotne jest dopasowanie amplitudy
tętnień napięcia wyjściowego prostownika do parametrów stabilizatora (głównie
rezystancji wewnętrznej). Regulacja wartości napięcia jest wymagana, aby
ograniczyć nadwyżkę napięcia i zmniejszyć straty mocy w układzie poprawiając
sprawność urządzenia. Mniejsze straty mocy pozwalają na zastosowanie
odpowiednio mniejszego układu chłodzenia stabilizatora, co w efekcie zmniejsza
koszty i gabaryty urządzenia.
LITERATURA
[1]
[2]
[3]
[4]
Barlik R., Nowak M., Technika tyrystorowa, Wydanie II, Wydawnictwo NaukowoTechniczne, Warszawa 1988.
Król A., Moczko J., PSpice symulacja i optymalizacja układów elektronicznych,
Wydanie I, Wydawnictwo Nakom, Poznań 1998.
Walczak J., Pasko M., Komputerowa analiza obwodów elektrycznych z
wykorzystaniem programu Spice, Wydanie I, Wydawnictwo Politechniki Śląskiej,
Gliwice 2005.
Walczak J., Pasko M., Zastosowanie programu Spice w analizie obwodów
elektrycznych i elektronicznych, Wydanie I, Wydawnictwo Politechniki Śląskiej,
Gliwice 2011.
SIMULATION TESTS OF SEMI-CONTROLLED RECTIFIER
The paper presents the simulation results of semi-controlled rectifier, which combined
with current stabilizer forms a current source. Simulations were done using the PSpice, the
results relate to output voltage waveforms of the rectifier. Block diagram of a current
source containing the simulated system is presented at the end of the paper.
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Mikołaj KSIĄŻKIEWICZ*
BADANIA SYMULACYJNE STABILIZATORA PRĄDU
Praca przedstawia wyniki badań symulacyjnych stabilizatora prądu, który jest głównym
elementem wykonawczym stabilnego źródła prądowego, wykonane w programie PSpice.
Celem badań jest zweryfikowanie poprawności działania stabilizatora poprzez wyznaczenie
parametrów statycznych (m. in. charakterystyka wyjściowa, rezystancja wewnętrzna) oraz
dynamicznych (m. in. odpowiedź skokowa, odłączenie zasilania).
SŁOWA KLUCZOWE: stabilizator, źródło prądu, symulacja, PSpice
1. WPROWADZENIE
Symulacja komputerowa jest obecnie istotnym narzędziem podczas
projektowania wszelkiego typu obiektów. Rozważania teoretyczne nie dają
odpowiedzi czy zaprojektowane rozwiązanie będzie funkcjonować zgodnie
z założeniami. Badania symulacyjne również nie rozwiewają wszelkich wątpliwości,
jednakże dostarczają dodatkowych informacji, które pomagają w ocenie
poprawności projektu. Im dokładniejszy model tym bardziej wiarygodne dane
otrzymuje się dzięki symulacji. Ponadto można wykonać dowolną liczbę testów bez
ponoszenia dodatkowych kosztów związanych na przykład z budową prototypów.
Praca przedstawia wyniki badań symulacyjnych stabilizatora prądu, który jest
głównym elementem wykonawczym stabilnego źródła prądowego, wykonane w
programie PSpice (źródło zdolne wygenerować prąd o wartości 12,5 A i zasilić
odbiornik o mocy 300 W). Celem badań jest zweryfikowanie poprawności
działania stabilizatora poprzez wyznaczenie jego charakterystyki prądowonapięciowej, a na jej podstawie oszacowanie wartości rezystancji wewnętrznej
źródła prądu, oraz zarejestrowanie błędu wartości generowanego prądu. Kolejnym
celem jest zbadanie właściwości dynamicznych, które pokażą jak zachowuje się
układ w stanach przejściowych bądź awaryjnych. Mają one wykazać czy występują
zjawiska niepożądane mogące na przykład uszkodzić odbiornik lub sam
stabilizator. Ostatecznym wnioskiem z przeprowadzonych badań powinno być
stwierdzenie czy badany układ spełnia założone wymagania i można przejść do
następnego etapu konstrukcji urządzenia.
__________________________________________
* Politechnika Poznańska.
248
Mikołaj Książkiewicz
2. SCHEMAT SYMULOWANEGO UKŁADU
STABILIZATORA PRĄDU
Rysunek 1 przedstawia schemat symulowanego w programie PSpice
stabilizatora prądu. Schemat ideowy został wykonany na bazie precyzyjnego źródła
prądowego opisanego w [2]. Do przygotowania obiektu badań oraz ustawienia
parametrów symulacji korzystano z [1][3][4].
Rys. 1. Schemat symulowanego układu stabilizatora prądu
Poszczególne symbole oznaczają:
V1 – {Vin}; źródło to reprezentuje sygnał sterujący wartością prądu stabilizatora,
V2 – 12 V; zasilanie wzmacniacza operacyjnego,
V3 – 26 V; zasilanie głównego toru prądowego,
U1 – AD820; wzmacniacz operacyjny typu Rail-to-Rail IO z możliwością
unipolarnego zasilania,
R1 – rezystor: za jego pomocą realizowane jest ujemne prądowe sprzężenie
zwrotne wymagane do poprawnej pracy stabilizatora,
R2 oraz C1 – rezystor i kondensator: służą kompensacji wpływu pojemności
wejściowej bramek tranzystorów MOSFET,
R3, R4, R5 – rezystory: podobnie jak R2 i C1 mają zapobiegać wzbudzaniu się
wzmacniacza operacyjnego spowodowanego pojemnościowym obciążeniem
wyjścia wzmacniacza,
Rodb – {Rval}; wartość rezystancji obciążenia,
M1, M2, M3 – tranzystory MOSFET mocy IRFP240.
Wartości elementów podane w nawiasach klamrowych „{}” są parametrami
symulacji, w przeciwnym wypadku ich wartości pobierane są z sekcji podpisanej
„PARAMETERS”, która występuje na schemacie.
Badania symulacyjne stabilizatora źródła prądowego
249
Charakterystyka sterowania IRodb({Vin}) jest liniowa o nachyleniu 100 A/V, co
odpowiada konduktancji R1 (1/R1 = 1/0,01 = 100 S).
3. WYZNACZENIE CHARAKTERYSTYKI WYJŚCIOWEJ
STABILIZATORA PRĄDU
Dla schematu jak na rys. 1, dla danej nastawy prądu (ustalenie wartości napięcia
{Vin}) wyznaczamy charakterystykę IRodb = f(URodb) poprzez zmianę rezystancji
obciążenia Robc. Wyniki symulacji przedstawia rys. 2 (nastawa prądu wynosiła
Vin = 0,1 V (10 A)).
Rys. 2. Charakterystyka wyjściowa IRodb = f(URodb) stabilizatora prądu, Vin = 100 mV (10 A)
Początkowa część liniowa charakterystyki obejmuje punkty: (0,099569;
9,956916) do (25,126061; 9,956906). Na podstawie tych punktów wyznaczono,
stosując regresję liniową, wartość rezystancji wewnętrznej stabilizatora prądu
(traktowanego w tym przypadku jak źródło prądu).
rw 176 M
(1)
Jest to wartość porównywalna z rezystancjami wewnętrznymi osiąganymi przez
precyzyjne źródła prądu zbudowane tylko i wyłączenie w oparciu o wzmacniacze
operacyjne.
Na podstawie punktu, w którym kończy się zakres liniowy można wyznaczyć
minimalne napięcie zasilania stabilizatora, poniżej którego traci on swoje
właściwości stabilizacyjne.
Z drugiego prawa Kirchhoffa dla toru wysokoprądowego otrzymujemy:
U V 3 U Rodb U stab , gdzie
(2)
250
Mikołaj Książkiewicz
U stab U M 1M 2 M 3 U R1 , stąd
(3)
U stab UV 3 U Rodb 26 25,126061 0,873939 V
(4)
Minimalne napięcie zasilania wynosi 0,874 V.
Wyznaczenie maksymalnego napięcia zasilania nie jest możliwe na podstawie
samej symulacji, gdyż jest ono uzależnione od maksymalnej mocy strat jaką może
rozproszyć stabilizator. Wartość tej mocy zależy głównie od zastosowanego układu
chłodzenia.
Błąd statyczny wartości prądu stabilizatora wynosi:
I 10 9,956916 0,043084 A 43,084 mA
(5)
4. BADANIE WŁAŚCIWOŚCI DYNAMICZNYCH
STABILIZATORA PRĄDU
4.1. Schemat układu do badania stanów dynamicznych
Rys. 3. Schemat układu stabilizatora prądu do badania stanów dynamicznych
Na schemacie (rys. 3) umieszczono przełączniki normalnie otwarte, podczas
badań były one zastępowane przez przełączniki normalnie zamknięte w zależności
od potrzeb. Zastosowano trzy przełączniki:
U2 – załącza/wyłącza zasilanie toru wysokoprądowego,
U3 – załącza/wyłącza wyjście wzmacniacza operacyjnego od bramek tranzystorów
MOSFET,
V4 – sygnał sterujący w postaci impulsu prostokątnego o nastawnych parametrach.
Badania symulacyjne stabilizatora źródła prądowego
251
4.2. Wpływ zmian napięcia sterującego na pracę stabilizatora prądu
a) Zwiększenie napięcia sterującego z wartości Vin = 0 V (0 A) do wartości
Vin = 0,1 V (10 A)
Przełączniki U2 i U3 zamknęły się w chwili t = 0, sygnał sterujący zmienił się z
wartości 0 V do wartości 0,1 V w chwili t = 1 ms (czas narastania zbocza wynosił
1 ns). Przebieg prądu odbiornika przedstawia rys. 4.
Rys. 4. Przebieg prądu odbiornika po zwiększeniu napięcia sterującego
Przy braku sygnału sterującego prąd stabilizatora wynosi 0 A. Po skokowej zmianie
napięcia sterującego do wartości 0,1 V prąd wykładniczo narasta do wartości ustalonej
9,956 A (uznajemy tą wartość jako ustaloną uwzględniając błąd statyczny generowanej
wartości prądu przez stabilizator). Czas ustalania wynosi około 0,3 ms od wystąpienia
wymuszenia. Nie występuje przesterowanie wartości prądu.
b) Zmniejszenie napięcia sterującego z wartości Vin = 0,1 V (10 A) do wartości
Vin = 0 V (0 A)
Przełączniki U2 i U3 zamknęły się w chwili t = 0, sygnał sterujący zmienił się z
wartości 0,1 V do wartości 0 V w chwili t = 1 ms (czas opadania zbocza wynosił
1 ns). Przebieg prądu odbiornika przedstawia rys. 5.
Rys. 5. Przebieg prądu odbiornika po zmniejszeniu napięcia sterującego
252
Mikołaj Książkiewicz
Zmniejszenie wartości napięcia sterującego wywołuje podobną reakcję układu
jak jego zwiększenie. Podstawową różnicą będzie opadanie wartości prądu,
jednakże kształt krzywej (wykładniczy) jest taki sam jak w poprzednim przypadku.
Czas ustalenia się prądu jest większy i wynosi około 0,8 ms.
4.3. Doprowadzenie napięcia z wyjścia wzmacniacza operacyjnego do bramek
tranzystorów MOSFET
Przełącznik U2 zamknął się w chwili t = 0, sygnał sterujący zmienił się z
wartości 0 V do wartości 0,1 V w chwili t = 0 ms (czas narastania zbocza wynosił
1 ns). Przełącznik U3 zamknął się w chwili t = 1 ms. Przebieg prądu odbiornika
przedstawia rys. 6.
Rys. 6. Przebieg prądu odbiornika po dołączeniu napięcia ze wzmacniacza operacyjnego do bramek
tranzystorów MOSFET
Układ reaguje natychmiast po zamknięciu przełącznika. Początkowo występuje
krótki impuls prądowy związany najprawdopodobniej z przeładowaniem
pojemności w układzie, który nakłada się na zaobserwowane już wcześniej
wykładnicze narastanie prądu odbiornika do wartości ustalonej.
Nie udało się przeprowadzić pomyślnej symulacji dla przypadku odłączania
wyjścia wzmacniacza od bramek tranzystorów. Układ jest na tyle wyidealizowany,
że rozładowanie się pojemności bramek zajmuje wielokrotnie więcej czasu niż ich
naładowanie. Prąd stabilizatora pozostaje bez zmian po odłączeniu wzmacniacza.
4.4. Załączenie/odłączenie zasilania toru wysokoprądowego
Przełącznik U3 zamknął się w chwili t = 0, sygnał sterujący zmienił się z
wartości 0 V do wartości 0,1 V w chwili t = 0 ms (czas narastania zbocza wynosił
1 ns). Przełącznik U2 zamknął się w chwili t = 1 ms. Przebieg prądu odbiornika
przedstawia rys. 7.
Badania symulacyjne stabilizatora źródła prądowego
253
Rys. 7. Przebieg prądu odbiornika po załączeniu zasilania toru wysokoprądowego
Załączenie zasilania toru wysokoprądowego powoduje skokową zmianę
wartości prądu powyżej wartość zadaną (około 12,6 A zamiast 10 A). Stan taki
utrzymuje się przez około 1,4 ms po czym wartość prądu opada do wartości
zadanej. Biorąc pod uwagę, że przesterowanie wartości prądu utrzymuje się przez
niedługi okres czasu w kontekście możliwej wielogodzinnej stabilnej ciągłej pracy,
można byłoby uznać, że nie jest to groźne zjawisko dla odbiornika.
Przełącznik U3 zamknął się w chwili t=0, sygnał sterujący zmienił się z
wartości 0 V do wartości 0,1 V w chwili t=0 ms (czas narastania zbocza wynosił
1 ns). Przełącznik U2 otworzył się w chwili t=1 ms. Przebieg prądu odbiornika
przedstawia rys. 8.
Rys. 8. Przebieg prądu odbiornika po wyłączeniu zasilania toru wysokoprądowego
Wyłączenie zasilania toru głównego powoduje skokowe zmniejszenie prądu
odbiornika do wartości 0 A. Przebieg prądu odbiornika ma kształt opadającego
zbocza impulsu prostokątnego.
254
Mikołaj Książkiewicz
5. UWAGI KOŃCOWE
Wyznaczona charakterystyka prądowo-napięciowa jest charakterystyką
rzeczywistego źródła prądowego, co jest bazowym założeniem projektu. Obliczona
rezystancja wewnętrzna stabilizatora, wynosząca około 176 MΩ, jest bardzo duża i
spełnia wymagania projektowe. W stanach dynamicznych nie stwierdzono
występowania potencjalnie szkodliwych zjawisk. Układ może przejść do etapu
prototypowania.
LITERATURA
[1]
[2]
[3]
[4]
Król A., Moczko J., PSpice symulacja i optymalizacja układów elektronicznych,
Wydanie I, Wydawnictwo Nakom, Poznań 1998.
Tietze U., Schenk Ch., Układy półprzewodnikowe, Wydanie IV, Wydawnictwo
Naukowo-Techniczne, Warszawa 2009, s. 37-62, 179-209, 293-332, 823-834, 939941.
Walczak J., Pasko M., Komputerowa analiza obwodów elektrycznych z
wykorzystaniem programu Spice, Wydanie I, Wydawnictwo Politechniki Śląskiej,
Gliwice 2005.
Walczak J., Pasko M., Zastosowanie programu Spice w analizie obwodów
elektrycznych i elektronicznych, Wydanie I, Wydawnictwo Politechniki Śląskiej,
Gliwice 2011.
SIMULATION TESTS OF CURRENT STABILIZER
The paper presents simulation results of current stabilizer, which is the main component
of stable current source, made in PSpice. The aim of the study is to verify the proper
operation of the stabilizer through the designation of static parameters (i.a. output
characteristic, internal resistance) and dynamics (i.a. step response).
P O Z N A N UN I VE RS I T Y O F T E C HN O L O G Y ACA D E MI C J O URN A L S
No 78
Electrical Engineering
2014
Karol BEDNAREK*
POZIOM NIEZAWODNOŚCI A WZROST OBCIĄŻALNOŚCI
SYSTEMÓW ZASILANIA GWARANTOWANEGO (UPS)
W pracy zajęto się systemami zasilania gwarantowanego UPS. Przeprowadzono
rozważania związane z możliwościami pokrywania rosnącego zapotrzebowania na energię
(w wyniku rozbudowy infrastruktury odbiorczej), jak również z zapewnianiem
oczekiwanej niezawodności zasilania elektrycznego odbiorników o znaczeniu
priorytetowym. Opisano własności funkcjonalne podstawowych struktur redundantnych
UPS. Przedstawiono i skomentowano uzyskane rezultaty badań wykonanych w układach
UPS EVER POWERLINE GREEN 33.
SŁOWA KLUCZOWE: systemy zasilania gwarantowanego, niezawodność urządzeń,
obciążalność układów zasilania, redundancja
1. WPROWADZENIE
Jakość dostarczanej energii elektrycznej związana jest przede wszystkim
z parametrami użytkowymi napięcia (energii) oraz z niezawodnością (ciągłością)
zasilania. Badania dowodzą, że nawet najlepsze elektroenergetyczne systemy
dystrybucji energii mogą być zawodne (ulec awarii), zatem nie spełniają wymagań
krytycznych, związanych z zasilaniem odbiorników o znaczeniu strategicznym.
Większość przedsiębiorców w celu maksymalnego ograniczenia ryzyka
powstania błędów przetwarzania danych bądź kosztownych przestojów w pracy
urządzeń lub systemów spowodowanych awariami albo nieprawidłową jakością
napięcia w sieci elektroenergetycznej decyduje się na instalowanie między
systemem dystrybucji energii a obciążeniami o znaczeniu strategicznym układów
zasilania gwarantowanego (UPS).
W zależności od wymaganego poziomu niezawodności zasilania
zabezpieczanych odbiorników energii możliwe jest dodatkowe zwiększenie
pewności działania systemów zasilania poprzez zastosowanie układów
redundantnych, czyli wprowadzenie jednostek dodatkowych, które mogłyby
zostać wykorzystane w przypadku uszkodzenia jednostek podstawowych. Wiąże
się to nierozerwalnie z ewidentnym wzrostem kosztów inwestycyjnych systemu.
__________________________________________
* EVER Sp. z o.o., Swarzędz.
256
Karol Bednarek
W wielu przypadkach, podczas rozbudowy infrastruktury jednostek
gospodarczych, pojawia się potrzeba dostosowania (zwiększenia) dostarczanej
mocy, co realizowane jest przez zamianę istniejącego rozwiązania na system
zasilania o większej mocy znamionowej lub przez równoległe dołączanie
kolejnych jednostek celem uzyskania zwiększonej obciążalności systemu.
W pracy zajęto się problematyką zwiększania obciążalności oraz
niezawodności (pewności działania) systemów zasilania gwarantowanego.
Przedstawiono własności funkcjonalne podstawowych układów redundantnych
UPS. Zamieszczono i skomentowano wyniki badań przeprowadzonych
w układach fizycznych, na przykładzie UPS EVER POWERLINE GREEN 33.
2. SYSTEMY ZASILANIA GWARANTOWANEGO
Zadaniem systemów zasilania gwarantowanego (UPS) jest bezprzerwowe
zasilenie urządzeń podczas krótkotrwałych zaników bądź zapadów napięcia albo
w przypadku długotrwałych braków zasilania sieciowego – dzięki wykorzystaniu
energii zgromadzonej w akumulatorach – zasilenie zabezpieczanych odbiorników
w określonym czasie (zależnym od ilości zmagazynowanej energii), niezbędnym
do bezpiecznego zakończenia realizowanych procesów, zapisania przetwarzanych
danych i zgodnego z określonymi procedurami wyłączenia urządzeń lub
systemów [1-7, 10]. W miejscach często występujących długotrwałych przerw w
zasilaniu sieciowym możliwe jest również skonfigurowanie współpracy zasilaczy
UPS z autonomicznymi systemami zasilania (np. agregatami prądotwórczymi)
i nieprzerwane zasilenie urządzeń wrażliwych napięciem o wymaganej jakości.
Koszty przerw w dostawach energii liczone są w zależności od gałęzi
przemysłu w dziesiątkach tysięcy nawet do milionów złotych. Zwiększenie
pewności dostarczania energii elektrycznej do odbiorników poprzez
wykorzystanie systemów zasilania gwarantowanego podyktowane jest zatem
zarówno względami technicznymi, jak również ekonomicznymi.
3. ODBIORNIKI O ZNACZENIU STRATEGICZNYM
Odbiornikami o znaczeniu strategicznym (priorytetowym) są urządzenia
i systemy, w których niewłaściwa jakość energii bądź przerwy w zasilaniu
elektrycznym (a zatem w ich prawidłowej pracy) pociągają za sobą znaczne koszty
ekonomiczne, stwarzają zagrożenie dla bezpieczeństwa, zdrowia lub życia
człowieka, związane są z utratą przetwarzanych informacji i danych albo
w jakikolwiek inny sposób są szczególnie uciążliwe dla użytkownika.
Kwalifikacja urządzeń i systemów jako odbiorników o znaczeniu strategicznym
jest decyzją subiektywną, zależy od ustalonych przez użytkownika priorytetów.
Powszechnie jako odbiorniki o znaczeniu strategicznym traktowane są sieci
komputerowe, centra przetwarzania danych, systemy zarządzania procesami
Poziom niezawodności a wzrost obciążalności systemów zasilania …
257
technologicznymi, linie produkcyjne, w których powstające przestoje są szczególnie
kosztowne dla firm czy urządzenia i systemy związane z bezpośrednim
oddziaływaniem na organizm człowieka (np. podtrzymujące funkcje życiowe) lub w
których nieprzewidziane przerwy w zasilaniu mogą doprowadzić do eliminacji
możliwości dalszego ich użytkowania (do ich uszkodzenia). Z uwagi na znaczenie ich
prawidłowej, niezakłóconej pracy priorytetowym zagadnieniem jest pewność
dostarczania do nich energii o właściwych parametrach [2, 3].
4. PRACA RÓWNOLEGŁA UPS
Przy wzroście mocy zapotrzebowanej przez odbiorniki rozbudowa systemu
zasilania polega na wymianie zasilacza UPS na jednostkę o większej mocy
(dostosowanej do nowych warunków obciążenia). Korzystniejszym rozwiązaniem
w takiej sytuacji jest równoległe załączenie dodatkowych zasilaczy (bądź
modułów) UPS i uzyskanie dzięki temu wyższej mocy wyjściowej, dostarczanej
do chronionych odbiorników. Należy jednak pamiętać, że możliwe jest to przy
właściwym doborze i wysterowaniu łączonych równolegle urządzeń lub modułów.
UPS jest skomplikowanym urządzeniem i zawsze należy liczyć się z tym, że
istnieje możliwość wystąpienia uszkodzenia któregoś z podzespołów, co
doprowadzić może do powstania przerwy w zasilaniu, a w konsekwencji do utraty
danych bądź przestoju w pracy chronionych układów. W celu ograniczenia
możliwości wystąpienia awarii systemu zasilania gwarantowanego stosuje się
zwielokrotnienie układów krytycznych lub ich elementów, aby powstała w efekcie
struktura zasilania zapewniła osiągnięcie zakładanego poziomu niezawodności. Ta
nadmiarowość, nazywana redundancją, polega na wprowadzeniu elementów
nadmiarowych (zapasowych) w stosunku do tego, co jest wymagane, aby
w przypadku wystąpienia awarii określonych układów wykorzystać elementy
nadmiarowe i uzyskać nieprzerwaną, prawidłową pracę rozpatrywanego systemu.
Z przedstawionych dotychczas rozważań wynika zatem, że równoległe łączenie
układów zasilania gwarantowanego stosowane może być w celu osiągnięcia:
zwiększenia obciążalności układu zasilania rezerwowego (zwielokrotnienia
mocy załączonych urządzeń o znaczeniu krytycznym),
zwiększenia poziomu niezawodności (pewności działania) systemu zasilania.
5. UKŁADY REDUNDANTNE
W wielu przypadkach moc układu zasilania gwarantowanego jest dobierana do
mocy chronionych odbiorników i jest nieznacznie wyższa od ich mocy w celu
uzyskania pewności zasilania nawet podczas chwilowych niewielkich przeciążeń
układu odbiorczego. Jest to tzw. konfiguracja wydajnościowa, oznaczana jako „N”
(o liczbie zasilaczy wynikającej z pełnego pokrycia zapotrzebowanej mocy – bez
nadmiarowości) – prosta, o relatywnie niskich kosztach, optymalna energetycznie
258
Karol Bednarek
z uwagi na dopasowanie do mocy odbiorników. Jej podstawową wadą jest niska
niezawodność. Gdy nastąpi awaria systemu UPS, pewność zasilania odbiorników
strategicznych ograniczona zostaje do poziomu niezawodności oferowanego przez
sieć elektroenergetyczną. Podobnie przełączenie na bypass serwisowy
(np. w celach konserwacji) eliminuje ochronę zabezpieczanych odbiorników.
Konfigurację tę można traktować jako minimalne wymaganie w celu zapewnienia
ochrony obciążeń o znaczeniu priorytetowym [2, 5-10].
Jednym z elementarnych wyznaczników doboru systemów zasilania
gwarantowanego jest pożądana niezawodność układu. W przypadku systemów,
w których nawet krótkotrwałe przestoje w ich pracy pociągają za sobą poważne
skutki w postaci znacznych strat finansowych bądź gdzie utrata (i brak możliwości
odzyskania) przetwarzanych danych stanowią egzystencjalny problem dla firmy,
należy wziąć pod uwagę konieczność zwiększenia ich bezpieczeństwa, a zatem
wzrostu ich poziomu niezawodności poprzez wprowadzenie nadmiarowości
elementów (redundancji) i eliminację tzw. pojedynczych punktów awarii. Wybór
optymalnego rozwiązania polega wówczas zawsze na kompromisie pomiędzy
wymaganą niezawodnością a ponoszonymi kosztami inwestycyjnymi
i eksploatacyjnymi. W systemach redundantnych w zależności od sposobu
współpracy i stopnia zwielokrotnienia zasilaczy UPS wyróżnia się najczęściej
rozwiązania: szeregowe, równoległe, zwielokrotnienie systemów, mieszane bądź
rozproszone [5-10].
A) Układ zasilania redundantny równoległy (nazywany również systemem
z redundancją czynną), o konfiguracji (N+1) – nadmiarowy UPS włączony jest
(pracuje) równolegle (rys. 1a) przejmując część obciążenia systemu (częściowo
odciąża zasilacze, które normalnie pokrywałyby zapotrzebowaną moc). W sytuacji
powstania awarii jednego z zasilaczy zostaje on automatycznie odłączony
(rys. 1b), natomiast pozostałe (wraz z nadmiarowym) bezprzerwowo przejmują
obciążenie, zapewniając nadal pełne pokrycie zapotrzebowanej mocy. Fizycznie
może to być zrealizowane przez równoległe połączenie klasycznych UPS-ów lub
z wykorzystaniem systemów modułowych.
Zaletami tego wariantu układu są: całkowicie bezprzerwowe zasilanie
odbiorników (nie ma zwłoki czasowej, wynikającej z przełączania UPS-ów),
możliwość rozbudowy systemu zarówno w zakresie wydajności, jak również
niezawodności, wydłużenie żywotności podzespołów w wyniku ich mniejszego
obciążania oraz akumulatorów przez korzystniejsze warunki ich pracy w trybie
buforowym (gdy każda z jednostek posiada własne akumulatory), a także
możliwość bezprzerwowego serwisowania. Niekorzystnymi natomiast są fakty, że
możliwa jest współpraca tylko takich samych UPS-ów, jest to rozwiązanie
bardziej skomplikowane technicznie (gdzie konieczne jest spełnienie
specyficznych warunków współpracy UPS-ów) oraz że maleje sprawność systemu
z uwagi na normalną pracę przy częściowym obciążeniu [5-10].
Poziom niezawodności a wzrost obciążalności systemów zasilania …
a)
259
b)
Rys. 1. Układ zasilania gwarantowanego redundantny równoległy (1+1)
a) normalna praca systemu, b) praca systemu w przypadku awarii jednego z zasilaczy UPS
B) Układ zasilania redundantny szeregowy (nazywany również systemem
z przełącznikiem statycznym, redundantnym izolowanym lub z redundancją bierną), o
konfiguracji (N+1) – zasilanie odbiorników o znaczeniu strategicznym odbywa się w
pełni przez UPS główny (podstawowy), natomiast nadmiarowy UPS włączony jest
(rys. 2a) w statyczny tor obejściowy zasilacza głównego (nie jest obciążony). Podczas
awarii UPS głównego następuje jego odłączenie, przełączenie obciążenia na statyczny
tor obejściowy i zasilacz nadmiarowy w pełni przejmuje obciążenie (rys. 2b).
Zasilacze UPS nie muszą mieć takich samych parametrów, ale każdy z nich musi
samodzielnie całkowicie pokryć zapotrzebowaną moc; rozwiązanie to nazywane jest
także pracą w „gorącej rezerwie” [5-10].
Zaletami przedstawionej konfiguracji są: możliwość wykorzystania różnych UPS
(nawet różnych producentów i o różnej wydajności), większa sprawność systemu
z uwagi na pełne obciążenie pracującego UPS-a, brak konieczności synchronizacji
pracujących jednostek, możliwość wprowadzenia nadmiarowości (przez dołożenie
dodatkowego UPS-a) w systemie, który jej wcześniej nie miał. Wśród wad tego
rozwiązania można wymienić konieczność zapewnienia wytrzymałości UPS-a
nadmiarowego na nagły skok obciążenia w chwili przełączania się modułu głównego
na tor obejściowy (z nagłymi stanami łączeniowymi przy pełnym obciążeniu układu
związana jest większa jego podatność na wystąpienie usterek), możliwość powstania
krótkiej (kilka ms) przerwy w zasilaniu odbiorników podczas awarii UPS-a głównego
bądź prac serwisowych (wynikającej z czasu przełączenia na UPS nadmiarowy), jak
również powstanie dodatkowych kosztów związanych z pracą w stanie jałowym UPSa nadmiarowego (stan gotowości do pracy).
260
a)
Karol Bednarek
b)
Rys. 2. Układ zasilania gwarantowanego redundantny szeregowy (izolowany) (1+1)
a) normalna praca systemu, b) praca systemu w przypadku awarii jednego z zasilaczy UPS
Liczba nadmiarowych jednostek UPS może być większa niż 1, uzyskuje się
wówczas wyższą niezawodność systemu (np. systemy redundantne N+2, N+3), ale
rosną w takim przypadku koszty jego budowy i eksploatacji. Realizowane są
również bardziej zaawansowane i skomplikowane systemy redundantne (struktury
system + system czy układy z redundancją rozproszoną), w których osiąga się
jeszcze wyższe poziomy niezawodności, lecz odbywa się to w bardziej
rozbudowanych sieciach zasilających, kosztem kolejnych znacznych nakładów
finansowych [5-10].
6. WYNIKI BADAŃ I ANALIZ
Urządzeniami badanymi były UPS EVER POWERLINE GREEN 33, zasilane
trójfazowo z sieci rozdzielczej nn oraz mające na wyjściu napięcia trójfazowe.
Wyjściowa moc pozorna każdego z zasilaczy wynosi 20 kVA, natomiast moc
czynna 16 kW. W urządzeniach tych, poza licznymi dodatkowymi
funkcjonalnościami (jak np. kompensacja mocy biernej oraz dodatkowy tryb pracy
hybrydowej), wprowadzono możliwość realizacji pracy równoległej – w
zależności od potrzeb w celu uzyskania większej niezawodności systemu
(redundancji) bądź zwiększenia obciążalności układu zasilania.
W przypadku elementów zasilających pracujących równolegle konieczny jest
precyzyjny dobór parametrów łączonych elementów oraz synchronizacja
wytwarzanych napięć, co w konsekwencji powinno prowadzić do równomierności
obciążenia łączonych źródeł. Z tego względu przeprowadzono badania napięcia w
układzie równoległym dwóch UPS EVER POWERLINE GREEN 33 oraz prądów
Poziom niezawodności a wzrost obciążalności systemów zasilania …
261
pobieranych z każdego z nich przez załączony odbiornik. Wyniki pomiarów
zamieszczono na rys. 3. Z uwagi na fakt, że prądy obu UPS pokrywały się,
w trakcie prezentacji na oscyloskopie i rejestracji przesunięto nieznacznie
w pionie ich przebiegi.
W celu dokonania bardziej szczegółowej analizy pracy równoległej
rozważanych UPS zarejestrowano przebiegi napięcia oraz prądów obu zasilaczy
w stanie dynamicznej (skokowej) zmiany obciążenia (rys. 4). Nawet w tych
stanach przejściowych następowało równomierne obciążenie obu UPS, a napięcie
wyjściowe utrzymywało się na niezmienionym poziomie (było stabilne).
Rys. 3. Wyniki badań napięcia i prądów w
układzie dwóch równolegle połączonych UPS
Rys. 4. Sygnały napięcia i prądów UPS w
czasie dynamicznej zmiany obciążenia
7. UWAGI PODSUMOWUJĄCE I WNIOSKI
Systemy zasilania gwarantowanego w wielu przypadkach są ważnymi
elementami układu zasilania, umożliwiającymi osiągnięcie prawidłowego
funkcjonowania zabezpieczanych odbiorników nawet w sytuacjach braku zasilania
bądź nieprawidłowych parametrów napięcia sieciowego.
Dzięki wprowadzaniu dodatkowych zasilaczy UPS można osiągać dużą
łatwość dostosowania zasilania rezerwowego do rosnącego zapotrzebowania
energetycznego urządzeń odbiorczych o znaczeniu strategicznym (skalowalność
systemu), jak również dużą elastyczność w kształtowaniu poziomu niezawodności
(bezpieczeństwa) rozważanych systemów (ich redundancji).
Brak wykorzystania zasilaczy bezprzerwowych UPS w systemach zasilania
odbiorników o znaczeniu priorytetowym (szczególnie wrażliwych na
oddziaływania zaburzeń i nieprawidłowości napięcia zasilającego) może
doprowadzić do poważnych konsekwencji w postaci zakłócenia poprawnego
funkcjonowania podzespołów elektrycznych lub elektronicznych, uszkodzeń bądź
zmiany parametrów technicznych oraz sprawności odbiorników, powstawania
kosztownych przestojów w pracy urządzeń, przyspieszonego starzenia się
262
Karol Bednarek
osprzętu, utraty przetwarzanych informacji, powstawania dodatkowych strat
mocy, uniemożliwienia prawidłowego funkcjonowania systemów grzewczych,
utraty możliwości skorzystania z urządzeń kontroli dostępu, itp.
LITERATURA
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
Bednarek K., Jakość, pewność i właściwa konstrukcja układu zasilania a
bezpieczeństwo urządzeń elektrycznych, Elektro.info, nr 12, 2012.
Bednarek K., Systemy zasilania gwarantowanego UPS – nowatorskie własności
funkcjonalne oraz superkondensatorowe zasobniki energii, Forum Informatyki w
Bankowości – Trendy informatyczne w bankowości spółdzielczej, Warszawa,
marzec 2013, s. 69-80.
Bednarek K., Kasprzyk L., Suppression of higher harmonic components
introduction to the networks and improvement of the conditions of electric supply of
electrical equipment, Przegląd Elektrotechniczny, No 12b, 2012, s. 236-239.
Wiatr J., Miegoń M., Zasilacze UPS oraz baterie akumulatorów w układach
zasilania gwarantowanego, seria Zeszyty dla elektryków, nr 4, DW MEDIUM,
Warszawa, 2008.
Miegoń M., Układy zasilania gwarantowanego, Elektro.info, nr 6, 2009.
McCarthy K., Porównanie konfiguracji systemów zasilaczy UPS, WP75, American
Power Conversion, 2004.
Januszewski S., Świątek H., Zymmer K., Przyrządy energoelektroniczne i ich
zastosowania. Zarys encyklopedyczny, Wydawnictwo Książkowe Instytutu
Elektrotechniki, Warszawa 2008.
Sosnowski J., Testowanie i niezawodność systemów komputerowych, Akademicka
Oficyna Wydawnicza EXIT, Warszawa 2005.
Kuczyński K., Nadmiarowość w systemach zasilania rezerwowego, Elektro.info,
nr 4, 2011.
http://www.ever.eu/ [dostęp 2014.01.20].
RELIABILITY LEVEL VERSUS LOAD-CARRYING CAPACITY
OF THE UNINTERRUPTIBLE POWER SYSTEMS (UPS)
The paper deals with the UPS guaranteed power supply systems. Possible satisfying the
growing power demand (resulting from the development of power receiving infrastructure)
and assurance of required reliability of power supply to the receivers of priority meaning
are considered. Operational properties of UPS basic redundant structures are described.
Results of the studies carried out for the UPS EVER POWERLINE GREEN 33 are
presented and commented.
Authors index
Authors
Artur
Wojciech
Karol
Janusz
Arkadiusz
Grzegorz
Marcin
Ryszard
Piotr
Adam
Jarosław
Jerzy
Zdzisław
Andrzej
Mikołaj
Marek
Grzegorz
Seweryn
Piotr
Zbigniew
Łukasz
Ryszard
Bartosz
Władysław
Stefan
Piotr
Filip
Ryszard
Piotr
Piotr
Piotr
Wojciech
Krzysztof
Zbigniew
Rafał
Radosław
Jarosław M.
Jerzy
Adamowicz
Bąchorek
Bednarek
Brożek
Dobrzycki
Dombek
Felinczak
Frąckowiak
Frączak
Gulczyński
Jajczyk
Janiszewski
Juszczyk
Książkiewicz
Książkiewicz
Lepich
Malinowski
Mazurkiewicz
Miller
Nadolny
Nagi
Nawrowski
Olejnik
Opydo
Paszek
Piechocki
Polak
Porada
Pruski
Przybyłek
Schneider
Sikorski
Siodła
Stein
Stępień
Szczerbowski
Szymańda
Tchórzewski
263
No of paper
14
3, 4
32
3, 4
23
17
24
10
19
25
24
8, 21
22
7, 8, 21
30, 31
15
18
27
9
17
16
11, 13
12
22
6
10
20
25, 26
6
17
16
20
18, 20
11, 13
28
1
5
2
Page
113
17, 35
255
17, 35
185
135
193
81
149
201
193
65, 167
175
59, 65, 167
241, 247
121
143
217
71
135
129
89, 105
97
175
51
81
157
201, 209
51
135
129
157
143, 157
89, 105
225
9
43
9
264
Authors index
Authors
Adam
Janusz
Marek
Maria
Tomaszuk
Walczak
Wancerz
Zielińska
No of paper
29
27
9
11, 13
Page
233
217
71
89, 105