AKADEMIA GÓRNICZO – HUTNICZA
im. Stanisława Staszica w Krakowie
Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki
mgr inŜ. Tomasz Hachaj
Techniki rozpoznawania obrazów w zadaniach interpretacji
znaczeniowej zmian perfuzji krwi tkanki mózgowej
ROZPRAWA DOKTORSKA
Promotor
Prof. dr hab. Marek Ogiela
Kraków 2010
Autor wyraŜa swe gorące podziękowania
Panu profesorowi doktorowi habilitowanemu Markowi Ogieli – promotorowi tej
pracy, którego pomoc oraz uwagi merytoryczne i formalne miały ogromne znaczenie w
przygotowaniu tej dysertacji.
Panu profesorowi doktorowi habilitowanemu Jackowi Migdałkowi – rektorowi
Uniwersytetu Pedagogicznego imienia Komisji Edukacji Narodowej w Krakowie,
kierownikowi Katedra Informatyki i Metod Komputerowych za okazaną Ŝyczliwość oraz
pomoc w sfinansowaniu badań naukowych, dzięki której moŜliwa była prezentacja niektórych
wyników podczas wyjazdów konferencyjnych.
Panu
profesorowi
doktorowi
habilitowanemu
Andrzejowi
Urbanikowi
–
kierownikowi Zakładu Diagnostyki Obrazowej Szpitala Uniwersyteckiego w Krakowie,
dzięki którego uprzejmości uzyskano zobrazowania medyczne wykorzystywane w badaniach.
1
SPIS TREŚCI
1. Wstęp ................................................................................................................................................... 4
2. Wybrane wiadomości na temat diagnostyki mózgowia za pomocą zobrazowań perfuzyjnych ........ 11
2.1 Choroby naczyniopochodne ośrodkowego układu nerwowego................................................... 11
2.2 Techniki diagnozowania chorób naczyniopochodnych ośrodkowego układu nerwowego (OUN)
........................................................................................................................................................... 13
2.2.1 Techniki dopplerowskie (USG dopplerowskie).................................................................... 14
2.2.2 Tomografia komputerowa (TK)............................................................................................ 15
2.2.3 Cyfrowa angiografia substrakcyjna (DSA - Digital Subtraction Angiography)................... 16
2.2.4 Angiografia tomografii komputerowej / rezonansu magnetycznego (angio TK / angio RM)
....................................................................................................................................................... 17
2.2.5 Tomografia rezonansu magnetycznego (RM) ...................................................................... 18
2.2.6 Badania radioizotopowe – SPECT i PET ............................................................................. 19
2.3 Badanie perfuzji mózgowej ......................................................................................................... 20
2.3.1 Badanie z dyfundującym wskaźnikiem kontrastowym......................................................... 24
2.3.2 Badanie z niedyfundującym wskaźnikiem kontrastowym, dynamiczna perfuzja TK, model
Meiera – Zierlaya........................................................................................................................... 26
2.3.3 Diagnozowanie na podstawie map perfuzyjnych ................................................................. 33
2.3.4 Prognostyczne znaczenie map perfuzji mózgowej dynamicznej pTK.................................. 35
2.4 Obecny stan wiedzy na temat automatycznych metod diagnostyki zobrazowań perfuzyjnych
mózgu ................................................................................................................................................ 39
2.5 Charakterystyka zbioru badawczego zobrazowań perfuzyjnych ................................................. 41
3. Algorytm automatycznego wykrywania potencjalnych zmian chorobowych na mapach perfuzji
mózgowej............................................................................................................................................... 44
3.1 Detekcja osi symetrii ................................................................................................................... 44
3.2 Detekcja asymetrii na mapach CBF i CBV ................................................................................. 48
3.3 Wyznaczanie wartości parametrów perfuzji................................................................................ 56
3.4 Ocena skuteczności działania algorytmu detekcji asymetrii........................................................ 57
4. Techniki dopasowania zobrazowań ................................................................................................... 63
4.1 Metody transformacji globalnej................................................................................................... 66
4.1.1 Transformacja afiniczna ....................................................................................................... 66
4.2 Metody z „rzadką siatką”............................................................................................................. 68
4.3 Metody z „gęstą siatką ” .............................................................................................................. 73
4.3.1 Szybka aproksymacja filtru gaussowskiego dla algorytmu Thiriona ................................... 76
4.4 Inne metody ................................................................................................................................. 81
2
5. Budowa deformowalnego atlasu mózgu............................................................................................ 82
5.1 Atlas Talairach............................................................................................................................. 83
5.2 Tworzenie wzorcowych przekrojów CT oraz ich opisów ........................................................... 84
5.3 Dobór optymalnego algorytmu dopasowania obrazu .................................................................. 86
6. Algorytmy oceny znaczenia zmian chorobowych ........................................................................... 100
6.1 Określenie typu zmiany chorobowej ......................................................................................... 100
6.2 MoŜliwości określenia rokowań dla chorych tkanek................................................................. 102
6.3 Badanie skuteczności algorytmów rozpoznawania ................................................................... 104
7. Architektura systemu analizującego zobrazowania diagnostyczne pTK......................................... 106
8. Podsumowanie wyników badań....................................................................................................... 110
Literatura.............................................................................................................................................. 114
Dodatek A - implementacja systemu DMD......................................................................................... 120
3
1. Wstęp
Komputerowa analiza obrazów tomografii komputerowej (TK) i rezonansu
magnetycznego (RM) mózgu od wielu lat budzi coraz większe zainteresowanie wśród
badaczy, a takŜe znajduje odzwierciedlenie w literaturze krajowej i zagranicznej, nie
wyłączając
producentów
oprogramowania
wspomagającego
diagnostykę
medyczną
mózgowia. Badania te obejmują między innymi zagadnienia segmentacji obrazów [19], [47],
tworzenia baz danych obrazów TK/RM [46], analizy morfometrycznej [93], detekcji stanów
patologicznych [1], [20] oraz przestrzennej wizualizacji i rekonstrukcji [21], [110]. Badania
dotyczące wykrywania zmian patologicznych poprzez detekcję asymetrii na zobrazowaniach
TK i RM były podejmowane między innymi w [92]. Nie zajęto się natomiast jeszcze
problemem detekcji asymetrii (a więc i patologii) na zobrazowaniach perfuzyjnych TK i RM.
W dalszej części pracy pojęcia mapy perfuzji mózgowej oraz zobrazowania perfuzji będą
uŜywane wymiennie.
Badanie dynamicznej perfuzji TK/RM jest nowoczesną i szeroko stosowaną w
neuroradiologii techniką oceny regionalnego lub całkowitego przepływu krwi w jednostce
czasu. Obrazowanie perfuzji mózgowej nabiera coraz większego znaczenia w diagnostyce
wielu rodzajów urazów głowy, ale takŜe padaczki i chorób naczyniopochodnych mózgowia,
w tym szczególnie udarów mózgu [101], [24], [90], [59], [63]. Badanie pTK (perfuzji TK)
pozwala na rozpoznanie zmian strukturalnych w przebiegu niedokrwienia, a takŜe na
zróŜnicowanie udaru niedokrwiennego mózgu z krwotocznym. NaleŜy zaznaczyć, Ŝe w
wysoko uprzemysłowionych krajach udar mózgu jest trzecią co do częstości przyczyną
śmierci (po zawale serca i nowotworach złośliwych) oraz najczęstszą przyczyną śmierci w
starszym wieku [22], dlatego pojawia się konieczność jego szybkiego diagnozowania, oraz
ustalenia przyczyny jego wystąpienia (ze względu na róŜne metody leczenia i wąski przedział
czasu, w którym moŜna je zastosować). Mimo określenia norm ilościowych dla
poszczególnych parametrów perfuzji zaleca się stosowanie diagnostyki opartej na ocenie
wartości względnych uzyskanych na podstawie analizy porównawczej symetrycznych
obszarów zainteresowań (ROI – region of interests) z obu półkul mózgowych uwidacznianych
na poddawanych analizie zobrazowaniach [101].
Zmiany chorobowe mózgowia są obecnie powszechnie obrazowane z zastosowaniem
TK i RM (z powodu duŜych moŜliwości diagnostycznej tych technik). Pomimo
powszechności tych badań naleŜy stwierdzić, Ŝe interpretacja znaczeniowa uwidocznionych
4
patologii jest jednak często utrudniona, a z uŜyciem komputerów w ogóle nie stosowana [73].
Uzasadnia to celowość rozwijania badań prowadzących do doskonalenia narzędzi diagnostyki
perfuzji mózgowej. Praktyczne zastosowanie tych narzędzi niesie ze sobą korzyści zarówno
dla pacjenta, jak i lekarza diagnosty. Wśród takich korzyści moŜna wymienić:
-
Znaczną eliminację błędów mogących wystąpić przy diagnozie postawionej przez
lekarza.
-
Szybką i przedstawioną w przejrzysty sposób analizę schorzenia, często z jego
znaczeniową interpretacją.
-
MoŜliwości
wykorzystania
ogromnej
wiedzy
zawartej
w
rozproszonych,
specjalistycznych bazach danych medycznych, do których dostęp jest moŜliwy dzięki
rozwojowi technologii teleinformatycznych (telemedycyna, PACS) [43], [45], [74].
Pomimo powszechności badań perfuzyjnych i licznych komercyjnych [90] oraz
darmowych [54] pakietów pozwalających na generację map dynamicznej perfuzji TK, nie
prowadzi się powszechnych badań w kierunku ich automatycznej analizy i semantycznego
rozumienia [73], [74], [95]. Autor tej dysertacji nie znalazł Ŝadnej pozycji w literaturze
podejmującej zagadnienie automatycznej, komputerowej analizy map perfuzji mózgowej TK,
natomiast moŜna spotkać rozwiązania dotyczące automatycznej analizy map perfuzyjnych
pozyskanych przy pomocy innych rodzajów badań radiologicznych. W [56] autorzy
korzystają z atlasu mózgu w celu analizy map perfuzji uzyskanych przy pomocy SPECT. Inne
podejście moŜna spotkać w [71], gdzie autorzy automatycznie odnajdują obszary mózgu
potencjalnie objęte udarem, natomiast wykorzystują do tego jedynie zobrazowania 3D RM.
Niniejsza dysertacja wypełnia zatem tę lukę badawczą rozwijając nie tylko algorytmy detekcji
zmian patologicznych uwidacznianych w badaniach perfuzji mózgowia, ale równieŜ
proponując nowe rozwiązania w dziedzinie komputerowego wspomagania diagnostyki oraz
zaawansowanych technik znaczeniowej analizy zobrazowań medycznych.
Badania perfuzji mózgowej TK dokonuje się przy uŜyciu dwóch podstawowych
technik opartych na róŜnych modelach matematycznych i środkach kontrastowych [101],
[59]:
-
Przy uŜyciu wskaźników dyfundujących do przestrzeni wewnątrznaczyniowej
(metoda XeCT, która nie znalazła jednak szerszego zastosowania klinicznego).
5
-
Niedyfundujących do przestrzeni międzynaczyniowych (dynamiczna perfuzja
TK), w tym wypadku mapy perfuzyjne zazwyczaj generowane są przy pomocy
konwolucyjnego modelu Meiera – Zierlera [115], [109].
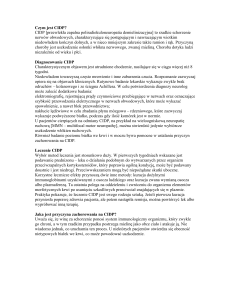
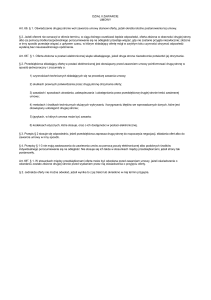
W ramach badania diagnostycznego rozwaŜane są zdjęcia tomograficzno komputerowe oraz uzyskane z nich mapy perfuzji (rysunek 1.1) przedstawiające mózg i
przepływ krwi mózgowej w płaszczyźnie poprzecznej (aksjalnej). Analiza wyniku badania
perfuzyjnego polega głównie na ocenie wielu waŜnych z fizjologicznego punktu widzenia
parametrów takich jak: CBF (cerebral blood flow) – mózgowego przepływu krwi, CBV
(cerebral blood volume) – objętości przepływającej krwi, MTT (mean transit time) –
średniego czas przejścia, czyli średniego czas przepływu zakontraktowanej krwi przez
łoŜysko naczyniowe w obszarze pomiaru, TTP (time to peak) – czasu osiągnięcia szczytu
krzywej (amplitudy) – czasu, w którym dochodzi do maksymalnego przepływu
zakontraktowanej krwi w obszarze pomiaru.
(A)
(B)
CBF
CBV
TTP
Rysunek 1.1 (A) Seria poprzecznych zdjęć wykonanych podczas badania dynamicznej perfuzji TK. Na ich
podstawie dokonuje się następnie stworzenie map perfuzji. Uwidaczniające się w czasie obszary
hiperintensywne (jasne) są wynikiem rozprzestrzeniającego się w tkankach kontrastu. Czas akwizycji danych
wynosił około 40 sekund. (B) Zobrazowania dynamicznej p-TK z manualnie naniesionymi obszarami
zainteresowań (ROI) oraz osią symetrii. Trzy mapy perfuzyjne (odpowiednio CBF, CBV i TTP).
Pierwszym etapem całego procesu komputerowej analizy zobrazowania jest detekcja
osi symetrii przebiegającej pomiędzy półkulami mózgowymi. W literaturze moŜna znaleźć
prace, w których przedstawione są metody w pełni automatyzujące ten proces [65], [81].
6
Kolejnym etapem jest znalezienie potencjalnych ognisk choroby. Etap ten jest
dodatkowo utrudniony, poniewaŜ nawet w zdrowym mózgu pacjenta mogą występować
pewne drobne regionalne róŜnice w perfuzji pomiędzy półkulami mózgowymi. Konieczne jest
więc zastosowanie metod, które wyselekcjonują jedynie rzeczywiste zmiany chorobowe.
Ostatni etap analizy to dokonanie pomiarów morfometrycznych patologicznego
obszaru (np. jego objętości, perfuzji, względnej asymetrii pomiędzy półkulami), wyznaczenie
strefy, w której patologia występuje w mózgu oraz sformułowanie na podstawie uzyskanych
danych, diagnozy decydującej o charakterze patologii (tzn. krwotoczna, niedokrwienna, czy w
postaci udaru mózgu itp.). Do wyznaczania poszczególnych struktur mózgowia w obrazach
perfuzji najczęściej korzysta się z deformowalnych atlasów mózgu, które wykonują to w
sposób automatyczny [99]. Atlasy takie wykorzystują do tego celu róŜne algorytmy
dopasowania obrazów (ang. image registration) [68], [42], [88].
Dzięki zainteresowaniu w środowisku lekarzy funkcjonalną diagnostyką czynności
mózgu (np. przy pomocy badania perfuzji mózgowej) a co za tym idzie duŜą liczbą
naukowych publikacji medycznych, moŜna znaleźć wiele cennych informacji na temat
znaczenia poszczególnych map w procesie diagnozy pacjenta, które mogą być wykorzystane
w automatycznym procesie diagnozy [59], [101].
Przeprowadzenie badań naukowych w dziedzinie metod rozpoznawania obrazów przy
uŜyciu wartościowych z medycznego punktu widzenia zobrazowań perfuzyjnych dostarcza
wiele cennych rezultatów. Analiza takich zobrazowań z wykorzystaniem nowych,
opracowanych przez autora tej pracy, algorytmów pozwala na dokonanie szybkiej i
automatycznej interpretacji występujących zmian i wzbogaca dostępny zestaw inteligentnych
metod wykorzystywanych w zadaniach automatyzacji diagnostyki medycznej. Uzyskane w
ten sposób informacje w połączeniu z innymi waŜnymi danymi dotyczącymi stanu zdrowia
pacjenta, historii jego choroby itd. mogą pozwolić na wzbogacenie istniejących systemów
obrazowania medycznego o moduły wspomagające zadania diagnostyczne i procesy
terapeutyczne. Czynione w tym kierunku badania wpisują się zatem w szeroki nurt zagadnień
związanych z rozwojem współczesnej informatyki medycznej, ukierunkowanej równieŜ na
tworzenie algorytmów komputerowego rozumienia i interpretacji znaczeniowej zobrazowań
biomedycznych [74], [95].
7
Realizowana praca doktorska będzie polegała na wykazaniu następującej tezy naukowej:
MoŜliwe jest opracowanie nowych efektywnych algorytmów i metod analizy,
pozwalających na dokonanie w sposób automatyczny:
-
Detekcji potencjalnych zmian o charakterze morfologicznym lub strukturalnym,
mogących świadczyć o stanach chorobowych, uwidacznianych na dynamicznych
mapach perfuzji mózgowej tomografii komputerowej;
-
Klasyfikacji znaczeniowej pojedynczych lub wielokrotnych zmian patologicznych o
charakterze ogniskowym uwidacznianych na mapach przepływu krwi mózgowia, a
takŜe określenie ich semantycznego znaczenia, w celu wspomagania procesów
diagnostycznych stanu pacjenta.
Celem niniejszej pracy będzie wykazanie postawionej tezy, czyli opracowanie
algorytmów pozwalających na automatyczną ocenę prawidłowości przepływu krwi w
zobrazowaniach perfuzyjnych, a takŜe detekcję potencjalnych ognisk choroby oraz stworzenie
opisu znaczeniowego dla zaobserwowanej patologii.
W celu wykazania postawionej tezy zostały przeprowadzone badania, które polegały na:
-
Zaproponowaniu nowych heurystycznych metod, przy uŜyciu których moŜliwa jest
detekcja, a następnie rozpoznanie określonych jednostek chorobowych o charakterze
ogniskowym (obszary objęte niedokrwiennym udarem mózgu, obszary o zaburzonej
perfuzji krwi).
-
Określenie funkcji semantycznych oraz klasyfikatorów pozwalających dokonywać
komputerowej klasyfikacji wykrytych zmian do rozwaŜanych klas jednostek
chorobowych.
-
Przeprowadzenie
eksperymentów
komputerowych
umoŜliwiających
określenie
skuteczności zaproponowanych metod.
-
Zaadoptowanie zaproponowanych algorytmów do postaci filtrów pozwalających na
szybkie wykrywanie zmian o charakterze ogniskowym w obrazach perfuzji mózgu
oraz dokonujących ich interpretacji.
-
Wskazanie perspektyw dalszego rozwoju zaproponowanych metod oraz moŜliwości
ich wykorzystania w zaawansowanych systemach interpretacji znaczeniowej wzorców
medycznych.
8
Prezentacja przeprowadzonych badań oraz uzyskanych wyników, poprzedzona
zostanie krótkim wprowadzeniem (w rozdziale drugim tej pracy) dotyczącym metod
diagnostyki mózgowia za pomocą zobrazowań perfuzyjnych. Przedstawione zostaną
naczyniopochodne jednostki chorobowe ośrodkowego układu nerwowego oraz współczesne
radiologiczne techniki ich diagnozowania. Szczególna uwaga zostanie poświęcona badaniu
perfuzji mózgowej metodą dynamicznej perfuzji TK. Zaprezentowany zostanie takŜe sposób,
w jaki lekarz interpretuje mapy pTK, jak równieŜ prognostyczne znaczenie takich map. W
rozdziale tym scharakteryzowany zostanie równieŜ zbiór badawczy obrazów, którym
posługiwał się autor tej pracy w przeprowadzonych badaniach naukowych.
Trzeci rozdział opisuje stworzony przez autora algorytm automatycznego wykrywania
potencjalnych zmian chorobowych na mapach perfuzji mózgowej. W kolejnych paragrafach
przedstawiono metody detekcji osi symetrii zobrazowania, detekcji asymetrii na mapach CBF
i CBV, mierzenie istotnych z punktu widzenia medycyny parametrów perfuzji. Omówiono
równieŜ wyniki walidacji tych algorytmów na zbiorze testowym.
W czwartym rozdziale zostały omówione wybrane techniki dopasowania obrazów
cyfrowych, które stosuje się w celu stworzenia deformowalnego atlasu mózgu. Szczegółowo
przedstawione zostały metody dopasowania oparte na transformacie afinicznej, metoda FFD
oraz algorytm Thiriona. Techniki te okazały się niezwykle przydatne w zastosowaniu do
analizy zobrazowań medycznych [88], [98], [72].
W kolejnym rozdziale zaprezentowany został sposób konstrukcji deformowalnego
atlasu mózgu stworzonego przez autora tej pracy. Atlas ten pozwala na opis struktur
anatomicznych widocznych na mapach perfuzji mózgowej. W rozdziale tym zaprezentowano
porównanie statystycznych wyników poszczególnych algorytmów dopasowania obrazów.
Algorytm, który uzyskał najlepsze wyniki został uŜyty do konstrukcji systemu analizy
zobrazowań omawianym w dalszej części pracy.
Rozdział szósty przedstawia algorytm oceny znaczenia zmian chorobowych. Algorytm
taki pozwala na określenie typu wykrytej zmiany oraz podejmowana jest próba przewidzenia
rokowań dla chorych tkanek. Przedyskutowana zostanie równieŜ skuteczność tej metody.
Rozdział siódmy poświęcony jest architekturze systemu analizującego zobrazowania
diagnostyczne pTK, który wykorzystuje wcześniej omówione metody. Rozwiązanie
omawiane jest w kontekście metod automatycznego rozumienia obrazów.
9
Podsumowanie uzyskanych rezultatów oraz ocena stopnia realizacji załoŜonego celu
pracy, jak równieŜ nasuwające się wnioski dotyczące dalszych badań stanowią treść rozdziału
ósmego zamykającego całą pracę.
10
2. Wybrane wiadomości na temat
diagnostyki mózgowia za pomocą
zobrazowań perfuzyjnych
W niniejszym rozdziale zaprezentowane zostaną naczyniopochodne jednostki
chorobowe ośrodkowego układu nerwowego (OUN) oraz współczesne radiologiczne techniki
ich diagnozowania. Szczególna uwaga zostanie poświęcona badaniu perfuzji mózgowej
metodą dynamicznej perfuzji TK. Zaprezentowany zostanie równieŜ sposób, w jaki lekarz
interpretuje mapy pTK, jak równieŜ ustala prognostyczne znaczenie tych map.
Scharakteryzowany zostanie takŜe obrazowy zbiór danych, którym posługiwał się autor pracy
w badaniach naukowych.
2.1 Choroby naczyniopochodne ośrodkowego układu nerwowego
Choroby naczyniopochodne mózgowia naleŜą do najczęściej spotykanych schorzeń
neurologicznych [101]. Stanowią trzecią co do częstości występowania, po chorobach serca i
nowotworach, przyczynę śmiertelności, są one równieŜ najczęstszym powodem inwalidztwa.
Występują najczęściej u osób starszych, chociaŜ w około 20% dotyczą ludzi w wieku
średnim.
Jedną z najczęstszych jednostek chorobowych jest udar mózgu. Jako udar mózgu [22] określa
się
stan
chorobowy
wywołany
niedokrwieniem
mózgu
(70-80%),
krwawieniem
wewnątrzmózgowym lub podpajęczynówkowym (20-30%). Choroba taka przebiega ostro lub
podostro, towarzyszą jej ogniskowe objawy neurologiczne, które są zaleŜne od lokalizacji
uszkodzonego obszaru mózgu.
Jako synonim udaru mózgu wcześniej stosowano takie określenia, jak apopleksja mózgu, albo wylew
- obecnie są juŜ one nieaktualne.
Według definicji WHO z 1976 roku udarem mózgu nazywa się zespół kliniczny
charakteryzujący się nagłym wystąpieniem ogniskowego a czasem równieŜ uogólnionego zaburzenia
czynności mózgu, którego objawy utrzymują się – jeśli nie spowodują wcześniej zgonu – dłuŜej niŜ
24 godziny.
11
Zgodnie z tą definicją osobną grupę stanowią stany przemijającej niewydolności krąŜenia
mózgowego (trwające krócej niŜ 24 godziny), pomimo, Ŝe pod względem etiologii (zespołu
przyczyn składających się na powstanie choroby) i patofizjologii (zmian i zaburzeń w pracy
komórek, narządów i układów organizmu będących wynikiem choroby) są identyczne z
udarami.
Między 55. a 64. rokiem Ŝycia po raz pierwszy na udar mózgu choruje około 300 na 100 000 osób. U
osób w wieku od 65 do 74 lat częstotliwość ta wzrasta do 800 na 100 000. Rozpowszechnienie
choroby w tym okresie Ŝycia wynosi około 15%. Przy tym męŜczyźni - przede wszystkim w starszym
wieku - chorują na udar nieco częściej niŜ kobiety.
WyróŜnia się następujący podział udaru mózgu w zaleŜności od etiologii:
-
Niedokrwienne (ewentualnie ze składową krwotoczną)
o Zakrzep miaŜdŜycowy;
Makroangiopatia
-
zajęcie
przez
zmiany
miaŜdŜycowe
największych naczyń zewnątrz i wewnątrz czaszkowych.
Mikroangiopatia – zajęcie małych przeszywających tętniczek
mózgu, które odchodzą pod kątem prostym od większych
znajdujących się w przestrzeni podpajęczej.
o Zator;
Sercowy;
Tętniczo – tętniczy.
o Układowo uwarunkowane zaburzeniami hemodynamicznymi;
o Zapalenia naczyń;
o Schorzenia hematologiczne.
-
Krwotoki;
o Masywne krwotoki wewnątrzmózgowe;
o Krwawienie podpajęczynówkowe;
o Zaburzenia krąŜenia Ŝylnego.
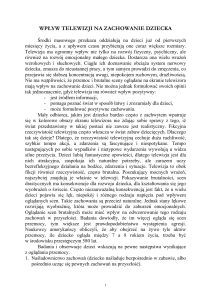
Podział udaru mózgu według przebiegu choroby oraz objawów klinicznych jest następujący
(rysunek 2.1):
-
TIA (ang. Temporary Ischaemic Atacks) – przemijające niedokrwienie mózgu –
całkowite wycofanie się objawów neurologicznych w ciągu 24 godzin.
12
-
Udar dokonany – utrzymujący się klinicznie deficyt neurologiczny z ewentualnie
późniejszym cofnięciem się początkowych objawów neurologicznych (przewaŜnie
niecałkowitym).
-
Udar postępujący – objawy neurologiczne nasilają się w ciągu pierwszych 24
godzin oraz / albo dalej postępują.
Rysunek 2.1 Przebieg objawów neurologicznych (na podstawie [22]).
2.2 Techniki diagnozowania chorób naczyniopochodnych
ośrodkowego układu nerwowego
Najczęściej stosowanymi metodami obrazowania radiologicznego mózgowia są [101]:
-
Techniki dopplerowskie (USG dopplerowskie);
-
Tomografia komputerowa (TK);
o Cyfrowa angiografia substrakcyjna (DSA - Digital Subtraction Angiography);
o Angio TK;
o XeCT (uŜycie wskaźnika dyfundującego);
o Dynamiczna perfuzja TK (uŜycie wskaźnika niedyfundującego).
-
Tomografia rezonansu magnetycznego (RM);
o Angio MR;
o Dynamiczna perfuzja MR (uŜycie wskaźnika niedyfundującego);
13
-
Badania radioizotopowe - tomografia emisyjna pojedynczego fotonu (SPECT - Single
photon
emission
computed
tomography),
pozytonowa
emisyjna
tomografia
komputerowa (PET - Positron emission tomography).
PowyŜsze badania pozwalają na rozpoznanie i określenie charakteru zmiany
niedokrwiennej, ustalenie jej lokalizacji, ocenę rozległości oraz monitorowanie leczenia. W
kolejnych podrozdziałach zostaną zaprezentowane podstawowe obszary zastosowań
powyŜszych technik w obrazowaniu chorób naczyniopochodnych ośrodkowego układu
nerwowego. PoniewaŜ badanie perfuzji mózgowej są przedmiotem badań naukowych autora i
tematem tej dysertacji zostanie im poświęcony osobny rozdział (2.3). W rozdziale tym
znajdzie się równieŜ omówienie fizycznego modelu wykorzystywanego przy tworzeniu map
perfuzji mózgowych.
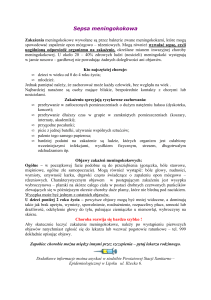
2.2.1 Techniki dopplerowskie (USG dopplerowskie)
Badania ultrasonograficzne mają od wielu lat ustalone miejsce wśród metod
diagnostyki obrazowej [44], [12]. Przykładowe obrazy otrzymane techniką Dopplera
przedstawione zostały na rysunku 2.2. Ich zaletą jest nieinwazyjność, dostępność i niskie
koszty, dlatego często wykonywane są w pierwszej kolejności. USG dopplerowskie pozwala
na ocenę przepływu krwi w duŜych tętnicach i Ŝyłach, wykorzystując zmiany długości fal
ultradźwiękowych odbitych od poruszających się krwinek. Techniki dopplerowskie
umoŜliwiają analizę zaburzeń przepływu krwi powodowanych przez zmiany morfologiczne.
Dokładność wysokorozdzielczych obrazów morfologicznych USG moŜna porównać do
wyników mikroskopowych badań histopatologicznych [44]. Niejednokrotnie wynik badań
USG pozwala rozpoznać schorzenie i umoŜliwić właściwy wybór innych, specjalistycznych
badań obrazowych gdy zachodzi potrzeba rozszerzenia procesu diagnostycznego. Oprócz
wielu zalet ultrasonografia dopplerowska ma równieŜ pewne wady:
-
Nie wszystkie odcinki tętnic domózgowych są dostępne w badaniu.
-
Obiektywność oceny morfologii oraz powtarzalność pomiarów zaleŜy w duŜej mierze
od umiejętności badającego i klasy uŜywanego aparatu.
14
Rysunek 2.2 Przykładowe obrazy otrzymane techniką colour Doppler: (A) długoodcinkowe zwęŜenie tętnicy
szyjnej wewnętrznej, (B) niedroŜność tętnicy szyjnej wewnętrznej, (C) ocena po stentowaniu (przywróceniu
droŜności) tętnicy szyjnej wewnętrznej. Kolor oznacza przepływ krwi w naczyniu krwionośnym. Źródło rysunku
[44].
2.2.2 Tomografia komputerowa (TK)
Tomografia komputerowa była pierwszą metodą diagnostyczną umoŜliwiającą
bezpośrednie obrazowanie ośrodkowego układu nerwowego. Pomimo rozwoju innych metod
takich jak RM, SPECT i PET tomografia komputerowa w wielu przypadkach pozostaje
pierwszym badaniem wykonywanym u pacjentów z podejrzeniem patologii OUN [86].
Wprowadzenie wielorzędowej tomografii komputerowej (zastosowanie wielorzędowych
matryc detektorów promieniowania rentgenowskiego) znacznie poszerzyło moŜliwości
diagnozowania w neuroradiologii. Dotyczy to głównie badań naczyniowych, perfuzyjnych, a
takŜe diagnostyki pacjentów po urazach (rysunek 2.3). Nowoczesna tomografia umoŜliwia
równieŜ rekonstrukcję obrazów w dowolnej płaszczyźnie z rozdzielczością zbliŜoną do
rozdzielczości obrazów osiowych. UmoŜliwia to tworzenie trójwymiarowych modeli
narządów wewnętrznych badanego.
Badanie
TK
pozwala
na
rozpoznanie
zmian
strukturalnych
w
przebiegu
niedokrwienia, a takŜe na zróŜnicowanie udaru niedokrwiennego z krwotocznym. Ocena
przepływu mózgowego w perfuzyjnym badaniu TK zwiększa moŜliwości diagnostyczne tej
metody w wypadku udaru mózgu.
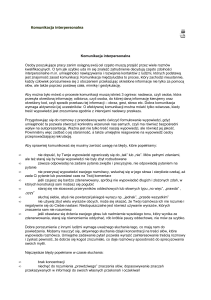
15
Rysunek 2.3 Zobrazowania TK przedstawiające zmiany strukturalne przebiegu niedokrwienia: (A) rozległy
obszar niedokrwienny obejmujący prawie całą prawą półkulę (lewa strona zobrazowania jest prawą stroną
pacjenta), (B) hipotensyjny (ciemniejszy) obszar obejmujący prawie całą prawą półkulę, (C) blizna
naczyniopochodna (świadcząca o przebytym zawale mózgu) obejmująca korę i struktury podkorowe lewego
płata potylicznego. Źródło rysunku [101].
2.2.3 Cyfrowa angiografia substrakcyjna (DSA - Digital
Subtraction Angiography)
Angiografia cewnikowa jest sposobem obrazowania światła naczyń (tętniczych –
arteriografia, Ŝylnych – flebografia) w badaniu rentgenowskim po podaniu jodowego środka
kontrastowego [9]. W angiografii selektywnej obraz konkretnego naczynia uzyskuje się przez
jego
bezpośrednie
zacewnikowanie.
Cyfrowa
angiografia
substrakcyjna
dzięki
komputerowemu odjęciu obrazu tła (maski) uwidacznia naczynia wypełnione środkiem
kontrastowym, bez nakładających się struktur kostnych. Angiografia jest badaniem
inwazyjnym z odsetkiem powikłań dochodzącym nawet do 10% [9]. Ze względu na rozwój
metod nieinwazyjnych, wskazania do wykonania angiografii cewnikowej uległy ograniczeniu.
Trójwymiarowa angiografia rotacyjna (3D DSA) umoŜliwia przestrzenne obrazowanie
naczyń (rysunek 2.4). Przewaga DSA nad angiografią RM i angiografią TK to wysoka
rozdzielczość przestrzenna, umoŜliwiająca obrazowanie bardzo drobnych naczyń, duŜa
rozdzielczość czasowa oraz moŜliwość selektywnego cewnikowania wybranych naczyń i
wykonywanie zabiegów terapeutycznych.
16
Rysunek 2.4 Trójwymiarowa rotacyjna DSA, (A), (B), (C) - lewa tętnica szyjna wewnętrzna
2.2.4 Angiografia tomografii komputerowej / rezonansu
magnetycznego (angio TK / angio RM)
Angiografia TK polega na obrazowaniu naczyń w tomografii komputerowej w trakcie
maksymalnego wzmocnienia kontrastowego po doŜylnym podaniu środka kontrastowego [9].
Badanie to jest obecnie szeroko stosowaną metodą rozpoznawania patologii naczyń.
Angiografia RM nie wymaga podania środka kontrastowego. Angio RM bez wzmocnienia
kontrastowego do uwidoczniania naczyń wykorzystuje zaburzenia sygnału związane z
przepływem krwi.
Badane tkanki są obrazowane w sposób trójwymiarowy przy pomocy obrazów
dwuwymiarowych – tzw. obrazów źródłowych (rysunek 2.5).
Rysunek 2.5 (A) Angio TK tętnic szyjnych (rekonstrukcja) (B) Angio RM tętnic szyjnych. Źródło rysunku [9].
17
2.2.5 Tomografia rezonansu magnetycznego (RM)
Tomografia rezonansu magnetycznego [86] znajduje zastosowanie między innymi w:
-
Wizualizacji struktury anatomicznej mózgu.
-
Diagnozowaniu
czynnościowym
umoŜliwiającym
ocenę
funkcji
mózgu
(czynnościowy rezonans magnetyczny).
-
Obrazowaniu dyfuzji (diffusion - weighted image DWI) oraz perfuzji (perfusion weighted image PWI).
-
Obrazowaniu podatności magnetycznej (stosowana między innymi w celu detekcji
zmian pokrwotocznych, badaniach czynnościowych mózgu oraz perfuzji).
-
Spektroskopii RM (badanie występowania związków chemicznych w tkankach
patologicznych i prawidłowych).
Istota działania RM polega na przedstawieniu wizualnym róŜnic właściwości
magnetycznych róŜnych tkanek, charakteryzujących się róŜnymi czasami relaksacji T1 i T2
[103]. Tkanki o krótkim czasie T1 charakteryzują się silnym sygnałem i są w obrazach T1 –
zaleŜnych obszarami jasnymi (hiperintensywnymi). Tkanki o długim T1 dają słaby sygnał i są
widoczne jako obszary ciemne (hipointensywne). Dla czasów T2 zachodzi odwrotna
zaleŜność: tkanki o krótkim czasie T2 posiadają słaby sygnał i są hipointensywne, natomiast
struktury o długim T2 są widoczne jako obszary jasne. Przykładowe modalności zobrazowań
RM widoczne są na rysunku 2.6.
RM ma zdecydowaną przewagę nad TK w wykrywaniu wczesnych zmian
niedokrwiennych (pierwsze godziny udaru). Często wybieraną metodą jest obrazowanie
dyfuzyjne [101].
Do obrazowania perfuzji w RM opracowano kilka istotnie róŜniących się do siebie
technik (dokładne ich wyjaśnienie moŜna znaleźć w [86]):
-
Metodę znakowania spinów krwi tętniczej.
-
Metodę obrazowania niespójnego ruchu.
-
Metodę opartą na zastosowaniu środków kontrastowych (zasada działania zbliŜona do
dynamicznej perfuzji TK objaśniona w rozdziale 2.3.1).
18
Rysunek 2.6 - (A) Obraz RM T2 – zaleŜny uwidacznia obszar hiperintensywny (jasny) odpowiadający
zwyrodnienie po przebytym udarze niedokrwiennym (B) Obraz DWI, udar w okolicy jąder podkorowych po
prawej stronie uwidoczniony w postaci ogniska o podwyŜszonym sygnale, (źródło rysunku [101]) (C) Perfuzja
RM, mapa prezentuje średni czas przepływu MTT (źródło rysunku [12]).
2.2.6 Badania radioizotopowe – SPECT i PET
Medycyna nuklearna opiera się na zastosowaniu wybranych związków chemicznych o
znanych właściwościach farmakokinetycznych (znane są zmiany stęŜenia leku lub jego
metabolitów w ustroju w czasie), znakowanych radioizotopowo i ocenie ich rozkładu w
badanym narządzie [53]. Zaletą badań radioizotopowych jest niewielka objętość podawanego
znacznika, wadą brak obrazu morfologicznego mózgowia. Stosowane obecnie techniki
rejestracji w badaniach radioizotopowych moŜna podzielić na dwie podstawowe grupy:
-
Badania z zastosowaniem techniki SPECT (izotopy znakujące emitują pojedyncze
kwanty promieniowania γ) rysunek 2.7 B, C.
-
Badania z zastosowaniem techniki PET (izotopy emitują pozytony, które w odległości
kilku milimetrów od miejsca emisji ulegają anihilacji z napotkanym protonem tworząc
dwa kwanty promieniowania γ) rysunek 2.7 A.
Obecnie techniki medycyny nuklearnej pozwalają między innymi na ocenę stanu bariery krew
– mózg, przepływu krwi w mózgu (perfuzji), badaniu aktywności wybranych układów
receptorowych (badania te wymagają stosowania odpowiednich farmaceutyków – innych dla
perfuzji, procesów metabolicznych i badania układów receptorowych).
19
Rysunek 2.7 Badanie perfuzji mózgowej metodami medycyny nuklearnej: (A) PET u chorego z guzem w
prawym płacie ciemieniowym, redukcja CBF po stronie prawej w porównaniu do strony lewej, (B) SPECT u
chorego po udarze, w zakresie unaczynienia prawej tętnicy środkowej mózgu, (C) wtórny spadek przepływu
krwi w obrębie przeciwstronnej do pierwotnego ogniska udarowego półkuli móŜdŜku. Źródło rysunku [53].
2.3 Badanie perfuzji mózgowej
Badania perfuzji mózgowej TK przeprowadzane są w celu umoŜliwienia dokonania
ilościowej lub półilościowej oceny regionalnego lub całkowitego przepływu krwi w
określonej jednostce czasu. W odróŜnieniu od rutynowego badania TK lub RM pozwalają na
określenie, w jakim obszarze mózgowia dokonały się juŜ zmiany nieodwracalne, a w jakim
niedokrwienie moŜe mieć charakter przejściowy (tissue at risk) [101].
Obrazowanie perfuzji mózgowej nabiera coraz większego znaczenia w diagnostyce
urazów głowy, wykrywaniu padaczki oraz wielu chorób naczyniopochodnych mózgowia.
Wykonanie badań perfuzyjnych wskazane jest przede wszystkim w przypadku podejrzenia
niedostatecznego krąŜenia mózgowego, zarówno w zespołach przemijającego niedokrwienia
jak i udarach dokonanych czy teŜ podkradania międzypółkulowego (transhemispheric
depression) [101]. Metoda ta znajduje równieŜ coraz szersze zastosowanie w ocenie krąŜenia
mózgowego po operacji tętnic szyjnych, a takŜe w diagnostyce neuroonkologii.
Analiza wyniku badania perfuzyjnego polega na ocenie wielu waŜnych z
fizjologicznego punktu widzenia parametrów:
-
CBF (cerebral blood flow) – mózgowy przepływ krwi – odpowiada ilości krwi
(ml) przepływającej w 100 g tkanki mózgowia w czasie jednej minuty (min).
-
CBV (cerebral blood volume) – objętość przepływającej krwi – odpowiada
objętości krwi (ml) zgromadzonej w łoŜysku naczyniowym na 100 g tkanki.
20
-
MTT (mean transit time) – średni czas przejścia, czyli średni czas przepływu
zakontraktowanej krwi przez łoŜysko naczyniowe w obszarze pomiaru, wyraŜony
przez iloraz CBV/CBF.
-
TTP (time to peak) – czas osiągnięcia szczytu krzywej (amplitudy) – czas, w
którym dochodzi do maksymalnego przepływu zakontraktowanej krwi w obszarze
pomiaru.
Badania perfuzji mózgowej TK dokonuje się przy uŜyciu dwóch podstawowych
technik opartych na róŜnych modelach matematycznych i środkach kontrastowych ([101],
[59]):
- przy uŜyciu wskaźników dyfundujących do przestrzeni wewnątrznaczyniowej
(metoda XeCT).
- niedyfundujących do przestrzeni międzynaczyniowych (dynamiczna perfuzja TK).
Metoda XeCT nie znalazła szerszego zastosowania klinicznego (z powodów
opisanych w dalszej części dysertacji).
Podstawą modeli stosowanych w obu tych technikach są równania dyfuzji
sformułowane na przełomie XIX wieku przez Adolfa Eugena Ficka. Prawo Ficka pozwala na
opis procesu dyfuzji substancji (np. środków kontrastowych), które nie podlegają
metabolizmowi przez tkanki (np. mózgu).
Pierwsza interpretacja prawa Ficka [48]:
dQ (t )
= CBF ⋅ (C A (t ) − CV (t ) ) (2.1)
dt
Gdzie:
CBF - mózgowy przepływ krwi do tkanek (cerebral blood flow)
C A (t ) - koncentracja kontrastu w tętnicach (czasem oznaczana jako AIF (t ) - arterial input
function np. [108], [64])
CV (t ) - koncentracja kontrastu w Ŝyłach
Q (t ) - masa kontrastu w tkance zaabsorbowana do danej chwili czasu
Druga interpretacja:
t
Q (t ) = CBF ⋅ ∫ (C A (t ) − CV (t ) )dt (2.2)
0
21
Ze wzoru (2.1) wynika, Ŝe masa kontrastu w tkance w danej chwili czasu jest równa
róŜnicy pomiędzy ilością kontrastu wpływającą do tkanki i ilości kontrastu opuszczającą
tkankę. Aby obliczyć całkowitą masę kontrastu, który wpłynął do tkanki w zadanym
przedziale czasowym naleŜy skorzystać z wzoru (2.2).
Intensywność kaŜdego piksela TK (wyraŜona w skali Hounsfielda) jest związana ze
współczynnikiem przenikania, z jakim promienie Rentgena pochłaniane są podczas
przechodzenia poprzez element objętości ludzkiego ciała (woksel). Po wstrzyknięciu (lub
inhalacji) substancji kontrastowej na zdjęciach tomograficznych moŜna zaobserwować
rozjaśnienie lub zaciemnienie tkanki, do którego dopłynęła juŜ substancja kontrastująca.
Zjawisko to nazywamy wzmocnieniem kontrastowym. WaŜną zaletą TK jest to, Ŝe
wzmocnienie kontrastowe jest liniowo proporcjonalne do koncentracji kontrastu w tkance.
W przypadku rezonansu magnetycznego (RM) relacja pomiędzy koncentracją
kontrastu a intensywnością sygnału wyraŜano jest wzorem ([64]):
Q (t ) = − k ⋅ ln
S (t )
(2.3)
S ( t0 )
Gdzie:
Q (t ) – jest „rzeczywistą” zawartością kontrastu (np. stosowanego w technikach RM
dimegluminianu gadopentatu, Gd-DTPA)
k – współczynnikiem skalującym zaleŜnym od skanera RM i środka kontrastowego
S (t ) – intensywnością sygnału w danej chwili czasu
t0 – czasem rozpoczęcia badania (nim substancja kontrastowa stanie się widoczna)
Aby obliczyć wzmocnienie kontrastowe techniką zrównowaŜoną (equilibrium
technique), naleŜy wykorzystać zestaw dwóch skanów przedstawiających ten sam fragment
ciała: obraz początkowy oraz drugi wykonany po czasie, w którym kontrast rozprzestrzeni się
równomiernie po całym ciele. Wzmocnienie obliczamy wtedy jako wynik prostego odjęcia
obrazów.
W wypadku dynamicznego pomiaru wzmocnienia kontrastowego (kontrast - enhanced
dynamic TK) zdjęcia tomograficzne zaczyna się wykonywać zanim pojawi się kontrast aŜ do
momentu, gdy substancja kontrastująca opuści tkankę (rysunek 2.8). Odjęcie kaŜdego z tych
obrazów od obrazu początkowego pozwala na uzyskanie krzywej zaleŜności wzmocnienia
kontrastowego od czasu TDC (time – versus - enhancement lub time density curve). Po
22
otrzymaniu dyskretnych wartości w chwilach czasu, krzywą TDC tkanek mózgowych
dopasowuje się do krzywej o rozkładzie gamma w celu zminimalizowania szumów i efektów
recyrkulacji kontrastu.
Rysunek 2.8 Seria 40 poprzecznych zdjęć wykonanych podczas badania dynamicznej perfuzji TK. Na ich
podstawie dokonuje się następnie stworzenie map perfuzji. PoniewaŜ zobrazowania wykonuje się w dwóch
płaszczyznach jednocześnie, mogą zostać stworzone dwa komplety map. Uwidaczniające się w czasie obszary
hiperintensywne (jasne) są wynikiem rozprzestrzeniającego się w tkankach kontrastu. Czas akwizycji danych
wynosił około 40 sekund.
W wypadku techniki zrównowaŜonej prędkość skanera nie musi być bardzo wysoka,
poniewaŜ pierwsze zobrazowanie (referencyjne) moŜe zostać wykonane w dowolnej chwili
poprzedzającej podanie substancji kontrastującej a kolejne w dowolnej chwili po wyrównaniu
się poziomu kontrastu w ciele (prędkość skanera moŜe wynosić zaledwie 10s na skan dla
pomiaru CBV [61]). Aby otrzymać krzywe wzmocnienia kontrastowego (TDC) tkanek mózgu
koniecznego do przeprowadzenia badania dynamicznego, czas akwizycji danych powinien
23
być mniejszy od 1 sekundy. Takiemu wymaganiu mogą sprostać wykorzystywane obecnie
skanery spiralnej tomografii komputerowej (slip – ring CT).
Aby moŜliwe było praktyczne obliczenie średniego czasu przepływu MTT naleŜy
prawidłowo rozróŜnić poszczególne składniki tkanek mózgu (np. tętnice, istota szara).
RozróŜnienie to nie jest moŜliwe poprzez prostą specyfikację obszaru przetwarzania (ROI)
bez dodatkowego uśredniania wartości sąsiadujących pikseli. Np. jeŜeli obszarem
przetwarzania jest mała tkanka zazwyczaj obserwowane jest równieŜ uśrednienie natęŜenia
odcieni pikseli pośród otaczającego obszar płynu mózgowo – rdzeniowego lub istoty białej i
szarej. RównieŜ białe i szare komórki nie mogą zostać jednoznacznie odseparowane od siebie.
Problem ten powoduje duŜe trudności z wyborem odpowiednich pikseli, które zawierają
informację o absorpcji wskaźnika przez wybraną strukturę anatomiczną. Aby ominąć ten
problem, w [70] autorzy proponują zastosowanie relatywnie duŜego obszaru zainteresowań
wybranego na zasadzie analizy histogramu (ułoŜenie pikseli nie musi więc być ciągłe).
Piksele (rejestrowane w fazie tętniczej) reprezentujące tętnice mogą zostać zidentyfikowane
jako te, których wartość w skali Hounsfielda [H] wynosi 48 – 100 jednostek, istota szara (z
fazy Ŝylnej) 40 - 44 [H], istota biała (równieŜ z fazy Ŝylnej) 32 – 36 [H]. Zmiany skali
Hounsfielda w zidentyfikowanych pikselach są następnie śledzone przez komputer na
kolejnych zobrazowaniach z sekwencji. MoŜliwe jest dzięki temu stworzenie wykresu
zaleŜności gęstości poszczególnych struktur od czasu.
2.3.1 Badanie z dyfundującym wskaźnikiem kontrastowym
Metoda pomiaru ilości krwi przepływającej przez mózg została zaproponowana po raz
pierwszy w 1944 roku przez C. F. Schmidta i S. S. Kety w [48]. W pracy tej znajduje się
równieŜ model matematyczny tego zjawiska. Badanie polega na pomiarze ilości
absorbowanego przez komórki badanego organu chemicznie obojętnego wskaźnika
(w początkowych doświadczeniach uŜyto podtlenku azotu). Przepływ krwi obliczany jest przy
załoŜeniu, Ŝe Ŝylna i tkankowa koncentracja wskaźnika jest w równowadze dyfuzyjnej z
całkowitym przepływem krwi. Ilość dyfundowanego przez komórki wskaźnika jest
przyjmowana za identyczną dla kaŜdej pochłanianej substancji. Uzyskane przez Schmidta i
Kety wyniki doświadczeń i poczynione przez nich spostrzeŜenia stały się podwalinami dla
metody XeCT. W metodzie tej środkiem kontrastowym jest stabilny ksenon. Jest to
24
niepromieniotwórczy
znacznik
wewnątrznaczyniowej.
Ksenon
podawany
jest
gazem
wziewnie,
dyfundujący
szlachetnym,
do
powodującym
przestrzeni
osłabienie
promieniowania rentgenowskiego podobnie jak jod lecz, w odróŜnieniu od niego, nie wchodzi
w reakcje z innymi pierwiastkami oraz swobodnie dyfunduje przez większość tkanek, w tym
przez barierę mózg – krew. Jest on podawany wziewnie w stęŜeniu 28% [101]. W płucach
przenika do krwiobiegu, a potem prze barierę krew – mózg, do tkanek mózgowia.
Ilościowej oceny mózgowego przepływu krwi CBF dokonuje się na podstawie
zmodyfikowanego równania Kety – Schmidta uwzględniającego zmianę stęŜenia Xe w
tkankach mózgowia i we krwi tętniczej w określonym czasie. Pomiaru stęŜenia Xe w
mózgowiu dokonuje się przez aparaty TK, natomiast stęŜenie Xe we krwi tętniczej wylicza
się pośrednio na podstawie wartości stęŜenia Xe w wydychanym powietrzu. Zmiana
osłabienia, proporcjonalna do lokalnego stęŜenia Xe, wyliczana jest z kolei z obrazów TK
metodą „pixel by pixel”.
Metoda wymaga stosunkowo długiego czasu akwizycji (10 min) i obróbki danych.
Badanie perfuzji oparte na stabilnym ksenonie i TK wymaga ścisłej współpracy z pacjentem,
w celu wykluczenia artefaktów ruchowych. KaŜda zmiana pozycji głowy pacjenta pomiędzy
cyklami akwizycji danych powoduje bowiem obniŜenie dokładności wyliczenia parametru
CBF. Badanie takie wymaga takŜe drogiego wyposaŜenia [107]. Dlatego teŜ badania XeCT
nie znalazły szerszego zastosowania klinicznego między innymi ze względu na nierzadko
występujące powikłania, do których zaliczają się niepokój i pobudzenie pacjenta. Inhalacja
ksenonu moŜe powodować równieŜ zmniejszenie częstotliwości oddechu (jak dotąd nie
odnotowano zaburzeń zagraŜających zdrowiu pacjenta), bóle głowy, mdłości, wymioty i
konwulsje. W duŜej grupie badanych wynoszącej 1839 pacjentów te uboczne efekty były
obserwowane odpowiednio u 3.6%, 0.4%, 0.2%, i 0.2% pacjentów [60].
25
Rysunek 2.9 Porównanie obrazów perfuzyjnych otrzymanych dla 53 letniej pacjentki z zespołem moyamoya
(niedroŜność duŜych tętnic wewnątrzczaszkowych) przy pomocy (A) dynamicznej perfuzji TK, (B) metody
Xenon TK. Mapa CBF (podane w cc/[100 g x min]) pokazuje znaczną asymetrię w obszarze objętym
schorzeniem. Obie metody obrazowania dostarczają bardzo podobnych informacji na temat zdrowia pacjenta.
Źródło rysunku [107].
2.3.2 Badanie z niedyfundującym wskaźnikiem kontrastowym,
dynamiczna perfuzja TK, model Meiera – Zierlaya
Dynamiczna perfuzja TK polega na rejestracji zmiany wartości współczynnika
wzmocnienia kontrastowego w świetle małych naczyń mózgowych w czasie pierwszego
przejścia przez łoŜysko naczyniowe podanego doŜylnie wskaźnika niedyfundującego.
Obliczenia dotyczące CBF, CBV i MTT są oparte na zastosowaniu prawa Ficka (2.2). JeŜeli
przyjmiemy, Ŝe przepływ kontrastu w Ŝyłach w interwale czasowym od 0 do t nie występuje,
równanie to moŜe zostać uproszczone do postaci:
t
Q (t ) = CBF ⋅ ∫ C A (t )dt (2.4)
0
Przepływ krwi moŜe zostać więc wyliczony w kaŜdej chwili czasu w interwale
czasowym (0, t ) jako stosunek nachylenia krzywej koncentracji podanego kontrastu w
tkankach i całki z krzywej koncentracji kontrastu w tętnicach w przedziale (0, t ) . Metoda ta,
choć potencjalnie uŜyteczna ma jednak powaŜne ograniczenia. Aby prawdziwe było załoŜenie
o braku przepływu Ŝylnego kontrastu, pomiar musi zostać wykonany w minimalnym średnim
czasie przejścia (MTT). Jest to zazwyczaj w zaleŜności od źródeł 3 – 5 s [101] lub 4.5 – 6.5 s
[62] dla mózgu. To ograniczenie implikuje niestabilność metody określania CBF [24].
Główną wadą tej metody (według [61]) jest załoŜenie, w czasie maksymalnego
nachylenia krzywej TDC Q (t ) nie występuje odpływ kontrastu przez Ŝyły. ZałoŜenie to nie
26
zawsze jest prawdziwe. JeŜeli nastąpi znaczący odpływ krwi z substancją kontrastującą zanim
wystąpi maksimum funkcji TDC naczyń mózgowych, spowoduje to niedoszacowanie CBF.
Co więcej, jeŜeli tętnica, którą uŜyto do generacji TDC tętnic jest relatywnie mała w stosunku
do przestrzennej rozdzielczości skanera TK, moŜe to spowodować uśrednienie sygnału
tętniczego z sygnałem z sąsiadujących naczyń. W efekcie otrzymamy niedoszacowanie
maksymalnej wartości tętniczego TDC co spowoduje przeszacowanie CBF.
Bezpośrednie zastosowanie prawa Ficka w celu znalezienia parametrów perfuzji nie
prowadzi do uzyskania dostatecznie dokładnych wyników. Znacznie lepsze wyniki moŜna
uzyskać stosując matematyczny model stworzony przez Paula Meiera i Kennetha L. Zierlera
[115]. Przed omówieniem modelu Meiera – Zierlera zostanie zdefiniowane pojęcie splotu
funkcji (konwolucji).
Niech f1 (t ) i f 2 (t ) będą funkcjami bezwzględnie całkowalnymi w przedziale (− ∞, ∞ ) .
Def 2.1 . Splotem funkcji f1 (t ) i f 2 (t ) w przedziale (− ∞, ∞ ) nazywamy całkę:
∞
f1 ( t ) ⊗ f 2 (t ) =
∫ f (τ ) ⋅ f
1
2
(t − τ )dτ (2.5)
−∞
Splot funkcji ciągłych ma następujące własności:
-
Przemienność:
f1 (t ) ⊗ f 2 (t ) = f 2 (t ) ⊗ f1 (t ) (2.6)
-
Łącznność:
f1 (t ) ⊗ [ f 2 (t ) ⊗ f 3 (t )] = [ f1 (t ) ⊗ f 2 (t )] ⊗ f 3 (t ) (2.7)
-
Rozdzielność względem dodawania:
f1 (t ) ⊗ [ f 2 (t ) + f 3 (t )] = f1 (t ) ⊗ f 2 (t ) + f1 (t ) ⊗ f 3 (t ) (2.8)
W badaniach radiologicznych materiał kontrastowy jest wstrzykiwany do krwiobiegu
relatywnie szybko (impulse injection) a masa kontrastu pozostająca w sieci kapilarnej w
miarę upływu czasu jest mierzona przy pomocy skanera TK. Pomiar polega na rejestrowaniu
krzywej wzmocnienia kontrastowego (time density curve – TDC, równieŜ time intensity
curve TIC, rysunek 2.10 B) dla tętnic i tkanek wchodzących w skład mózgu. W modelu
Meiera – Zierlera wprowadza się dodatkowo funkcję R (t ) , która opisuje zawartość kontrastu
27
w tkankach mózgu w zaleŜności od czasu. Ze względu na jej charakter określa się ją w
literaturze jako impulsową funkcją residuum (impulse residue function - IRF).
Rysunek 2.10 A, impulsowa funkcja residuum mózgu R(t), hipotetyczny kształt oczekiwany po dokonaniu
dekonwolucji C A (t ) i Q (t ) . B, przykład krzywych TDC dla tętnic C A (t ) (czarne punkty) i dla tkanki
mózgowej
Q (t ) (białe okręgi). Źródło rysunku [15].
Wykres funkcji R (t ) ma bardzo charakterystyczny kształt. Początkowe plateau
zakończone jest ciągłym spadkiem wartości funkcji aŜ do ponownego osiągnięcia wartości
zerowej. Czas trwania plateau związany jest z okresem czasu, podczas którego cały
wstrzyknięty materiał kontrastowy pozostaje w sieci kapilarnej. Po tym czasie materiał
kontrastowy zaczyna opuszczać sieć, co powoduje zmniejszenie wartości R (t ) . Znajomość
impulsowej funkcji residuum pozwala na obliczenie MTT zgodnie z następującym podanym
przez Zierlera [115] wzorem:
∞
MTT
=
∫ R ( t )dt
0
R max
(2.9)
gdzie Rmax jest maksymalną wartością krzywej R(t) (otrzymaną przy pomocy dekonwolucji).
Bezpośrednie otrzymanie wartości funkcji R(t) nie jest moŜliwe, poniewaŜ trudno jest
dokładnie i bezinwazyjnie zidentyfikować tętnice zasilające poszczególne regiony mózgu.
Zamiast tego pacjentowi podawany jest materiał kontrastowy, który pozostaje w sieci
kapilarnej i moŜe zostać zmierzony przy pomocy skanera TK. Dzięki temu moŜemy równieŜ
bezpośrednio dokonać pomiaru masy kontrastu w tkance ( Q (t ) ). JeŜeli przepływ krwi jest
stały i wzmocnienie kontrastowe krwi tętniczej jest liniowo zaleŜne od koncentracji kontrastu
moŜemy zastosować model Meiera – Zielera:
28
Q (t ) = CBF ⋅ [C A (t ) ⊗ R (t )] (2.10)
Gdzie ⊗ oznacza operator konwolucji (splotu).
Zgodnie z wnioskami wysuniętymi przez Axela [5] objętość krwi przepływającej przez sieć
kapilarną (CBV) moŜe zostać policzona jako iloraz obszarów:
∞
CBV
=
∫ Q ( t ) dt
0
∞
(2.11)
∫C
A
( t ) dt
0
gdzie Q (t ) i C A (t ) są odpowiednio wzmocnieniami kontrastowymi tkanek i tętnic. Typowy
zestaw wyników Q (t ) i C A (t ) widoczny jest na rysunku 2.10 B.
PowyŜszy model wymaga, aby bariera krew – mózg była nienaruszona i nie
występowały recyrkulacje materiału kontrastowego. JeŜeli bariera została naruszona (np.
występują guzy, obrzęki) Q (t ) staje się sumą wzmocnień wewnątrznaczyniowych i
zewnątrznaczyniowych, co powoduje zawyŜenie wartości CBV. NaleŜy wtedy zmodyfikować
procedurę obliczania poszczególnych parametrów perfuzyjnych, np. stosując algorytm
podany w [15].
Ostatecznie wartość CBF moŜe obliczona jako:
∞
CBV
=
CBF =
MTT
Rmax ⋅ ∫ Q (t )dt
0
∞
(2.12)
∞
∫ R(t )dt ⋅ ∫ C
0
A
(t )dt
0
PoniewaŜ koncentracja kontrastu w tkankach Q (t ) jest związana z ilością kontrastu w
tętnicach C A (t ) i impulsową funkcją residuum R (t ) zgodnie z równaniem (2.11), zatem
konieczne jest wyliczenie wartości R (t ) poprzez dekonwolucję. Najczęściej ([90], [108],
[64], [109], [87], [52]) moŜna spotkać się z rozwiązaniem sprowadzającym problem do
równania macierzowego, które następnie rozwiązywane jest metodą rozkładu na wartości
osobliwe (singular value decomposition, SVD).
Nim zostanie zastosowane SVD naleŜy przedstawić równanie (2.10) w dyskretnej postaci
macierzowej z N równoodległymi punktami czasowymi:
29
j
Q (t j ) = ∆t ⋅ CBF ⋅ ∑ Cˆ A (t i ) R (t j − t i ) , (2.13)
i =0
Gdzie j = 1,2,..., N .
Współrzędne macierzy koncentracji kontrastu w tętnicach są postaci:
∆t ⋅ Cˆ A (ti − j ) j ≤ i
(2.14)
0 pozost. przyp.
α i, j =
Dla uproszczenia niech ∆t = 1 .
Równanie macierzowe:
0
Q (t0 ) C A (t0 )
Q (t ) C ( t ) C (t )
A 0
1 = A 1
...
... ...
Q (t j ) C A (t j ) C A (t j −1 )
...
0 CBF ⋅ R (t0 )
...
0 CBF ⋅ R (t1 )
⋅
(2.15)
...
0
...
... C A (t0 ) CBF ⋅ R (t j )
MoŜna zapisać jako:
c = A ⋅ b (2.16)
SVD pozwala na znajdowanie rozwiązań równań liniowych optymalnych w sensie
najmniejszych kwadratów. Metoda oparta jest na następującym twierdzeniu algebry liniowej:
Twierdzenie 2.1
JeŜeli dla macierzy A spełnione są następujące załoŜenia:
1. Am
x n
:m ≥ n
2. ∀ 1 ≤ i ≤ m, 1 ≤ j ≤ m
Ai , j ∈ R
To istnieją: kolumnowo – ortogonalna macierz U m
dodatnimi lub równymi zero (wartości własne) Wn
Ŝe A = U ⋅ W ⋅ V T
Dla macierzy U i V prawdziwe jest:
U T ⋅U = V T ⋅V = 1 ,
poniewaŜ są one kolumnowo - ortogonalne.
30
x n
x n
, diagonalna macierz z elementami
, i ortogonalna macierz Vn
x n
, takie,
PoniewaŜ V jest macierzą kwadratową, to jest ona wierszowo – ortogonalna:
V ⋅V T = 1
JeŜeli macierz A jest kwadratowa o wymiarach n x n, wtedy U, V, W są macierzami o tych
samych wymiarach. W powyŜszym przypadku obliczenie macierzy A−1 staje się trywialne:
poniewaŜ macierze U i V są ortogonalne, ich odwrotności są równe transpozycjom. W jest
macierzą diagonalną, macierz do niej odwrotna jest równieŜ diagonalna, współczynniki na
diagonali W −1 są odwrotnościami współczynników macierzy W.
1
A −1 = V ⋅ diag ⋅ U T (2.17)
w
j
Korzystając z powyŜszej równości rozwiązanie (4.4-4) moŜna wyliczyć jako:
1
b = V ⋅ diag ⋅ (U T ⋅ c ) (2.18)
w
j
Dokładny opis i algorytm metody SVD moŜna znaleźć np. w [80].
W wyniku przeprowadzonych obliczeń otrzymuje się zestaw wartości CBF ⋅ R (t ) dla
poszczególnych chwil czasu. Dla mapy CBF wartość kaŜdego piksela jest określana jako
maksymalna wartość krzywej CBF ⋅ R (t ) [16]. Mapa CBV moŜe zostać obliczona na
podstawie równania (2.11) jak równieŜ zgodnie z zaleŜnością (2.12) jako obszar pod krzywą
CBF ⋅ R (t ) . Wartości pikseli mapy MTT powstają z (2.9). W literaturze nie ma zgodności co
do kolejności wyznaczania poszczególnych map i autorzy nie motywują dlaczego wybrali
taką a nie inną kolejność obliczeń. Mapa TTP powstaje poprzez przypisanie kaŜdemu jej
pikselowi wartości proporcjonalnej do czasu osiągnięcia maksymalnej wartości TDC w
danym wokselu.
31
gęstość [HU]
TTP
Pole pod krzywą (CBV)
Wartości wzmocnienia
kontrastowego
CBF
AT
CBF R(t)
czas [s]
MTT
Rysunek 2.11 Teoretyczny przebieg krzywej CBF ⋅ R (t ) uzyskany po dekonwolucji (krzywa perfuzji) wraz z
najwaŜniejszymi parametrami. AT – czas pojawienia się kontrastu (arrival time), TTP – czas osiągnięcia
maksymalnej wartości danej TDC (time to peak). Źródło rysunku [30].
Wyznaczenie funkcji residuum R(t) przy pomocy konwolucyjnego modelu Meiera –
Zierlera (2.10) wymaga znajomości funkcji Q(t) i C A (t ) . Q(t) moŜe zostać odczytane
bezpośrednio ze zdjęć TC lub MRI. Aby wyznaczyć stopień koncentracji kontrastu w
tętnicach naleŜy wybrać odpowiednią tętnicę (lub kilka tętnic) na zobrazowaniu mózgu
wykonywanym w płaszczyźnie poprzecznej. Wybór moŜe zostać wykonany manualnie
([109], [16]) lub przy pomocy róŜnych metod pozwalających tego dokonać automatycznie
([64], [14], [16], [38], [111]). Automatyczne odszukanie optymalnych ROI opiera się
zazwyczaj na doborze takich pikseli, dla których kształt TDC zbliŜony jest do oczekiwanego
kształtu AIF (krzywej rozkładu gamma). Wykorzystywany obecnie w szpitalach komercyjny
software (np. Syngo Neuro Perfusion CT firmy Siemens [120]) pozwala na korzystanie z obu
tych trybów. Kolejnym krokiem jest uŜycie otrzymanych dyskretnych wartości TDC do
estymacji parametrów krzywej o rozkładzie gamma (2.19) (gamma - variate function, [70],
[64], [14], [38], [51]). Operację tą wykonuje się w celu zmniejszenia wpływu recyrkulacji
kontrastu i szumów rejestrowanych na zobrazowaniach (rysunek 2.12).
f (t ) = K ⋅ (t − t0 ) ⋅ e
α
Gdzie:
t0 - czas pojawienia się kontrastu
t – czas, który upłynął od iniekcji
32
− ( t −t0 )
β
(2.19)
K , α , β - współczynniki dopasowania krzywej
Rysunek 2.12 Przykłady AIF otrzymanych z róŜnych obszarów mózgu: (A) tętnicy przedniej mózgu (ang.
anterior cerebral artery), (B) zatoki strzałkowej górnej (ang. superior sagittal sinus), (C) jądra podstawowego
(ang. basal ganglia). Źródło rysunku [38].
2.3.3 Diagnozowanie na podstawie map perfuzyjnych
Obecnie w celu otrzymania map perfuzyjnych wykorzystuje się wiele urządzeń
zarówno TK jak RM. W licznych publikacjach [39], [50], [59], [25], [63] stwierdzono, Ŝe
dane uzyskiwane przy pomocy p-TK mogą dostarczyć wartościowych informacji
diagnostycznych. Jednak uŜyteczność poszczególnych obliczanych wskaźników wymaga
jeszcze dalszej badań i walidacji [90]. Badania porównawcze róŜnych pakietów
oprogramowania, które mogą zostać uŜyte w celu wyliczenia map zostały w ostatnim czasie
33
wykonane przez Acute Stroke Imaging Standardization Group (ASIST-Japan) [90]. Wykazały
one, Ŝe przy pomocy pakietów oprogramowania róŜnych producentów na podstawie tych
samych danych mogą zostać wygenerowane mapy perfuzyjne róŜnice się pomiędzy sobą
(rysunek 2.13). Nie istnieje natomiast jeden standard generowania map, który zostałby
zaimplementowany przez wszystkich dostawców urządzeń diagnostycznych. Z powodu braku
w literaturze medycznej przesłanek co do wyboru konkretnego pakietu oprogramowania,
autor zdecydował się korzystać z map perfuzyjnych otrzymanych przy pomocą Syngo Neuro
Perfusion CT firmy Siemens [120], który jest uŜywany w codziennej praktyce klinicznej w
Krakowskim Szpitalu Uniwersyteckim.
Rysunek 2.13 Zobrazowania dynamicznej p-TK wygenerowane z tych samych danych (68 – letni męŜczyzna z
niedroŜnością lewej środkowej tętnicy mózgu) przy pomocy oprogramowania róŜnych firm. Pomimo, Ŝe
zastosowano tą samą skalę kolorów wartości CBF i MTT jak i obszary, w których stwierdzono zaburzenia róŜnią
się pomiędzy sobą. (A) GE, (B) Siemens, (C) Philips, (D) Toshiba, (E) Hitachi. Źródło rysunku [90].
Co ciekawe, grupa ASIST stworzyła własny program do analizy danych perfuzyjnych (PMA Perfusion Mismatch Analyzer), do którego moŜna uzyskać darmowy dostęp po rozwiązaniu
testu z zakresu podstaw radiologii [54].
Badania perfuzji TK są szeroko stosowane w nowoczesnej neuroradiologii. Znajdują
zastosowanie między innymi w diagnozowaniu guzów wewnątrzczaszkowych ([102])
uwidaczniając zwiększone wartości przepływu (CBF) i objętość krwi (CBV) w okolicy guza.
Obrazowanie perfuzji mózgowej nabiera coraz większego znaczenia w diagnostyce urazów
głowy, padaczki oraz chorób naczyniopochodnych mózgowia, w tym szczególnie udarów
mózgu ([101], [24], [90], [50], [59], [25], [63], [54]). Badanie p-TK pozwala na rozpoznanie
zmian strukturalnych w przebiegu niedokrwienia, a takŜe na zróŜnicowanie udaru
34
niedokrwiennego mózgu z krwotocznym. PoniewaŜ w wysoko uprzemysłowionych krajach
zachodnich udar mózgu jest trzecią co do częstości przyczyną śmierci (po zawale serca i
nowotworach złośliwych) oraz najczęstszą przyczyną w starszym wieku ([22]), pojawia się
konieczność jego szybkiego diagnozowania oraz ustalenia przyczyny jego wystąpienia (ze
względu na róŜne metody leczenia i wąski przedział czasu, w którym moŜna je zastosować).
Mimo określenia norm ilościowych dla parametrów CBV i CBF zaleca się stosowanie
diagnostyki opartej na ocenie wartości względnych uzyskanych na podstawie analizy
porównawczej symetrycznych obszarów zainteresowań (ROI – region of interest) z obu
półkul mózgowych uwidacznianych na poddawanych analizie zobrazowaniach; czyli detekcji
asymetrycznych obszarów o znaczącej wielkości i róŜnicy wartości odpowiednich
parametrów perfuzji.
2.3.4 Prognostyczne znaczenie map perfuzji mózgowej
dynamicznej pTK
W literaturze medycznej ([101]) autorzy zwracają uwagę, Ŝe wartości parametrów
MTT i TTP są bardzo czułymi wskaźnikami zaburzeń hemodynamicznych. Ich zmiana
pojawia się praktycznie jednocześnie z wystąpieniem niedokrwienia, parametrom tym nie
przypisuje się jednak wartości prognostycznych. Wartość MTT w obszarze upośledzonej
perfuzji wzrasta głównie z powodu obrzęku, wraz ze spadkiem ciśnienia perfuzyjnego w
strefie martwicy wartości MTT stają się nieoznaczalne. Wyraźnie wydłuŜony TTP obserwuje
się w wypadku krytycznego zwęŜenia tętnicy po stronie udaru przy jednoczesnym zwęŜeniu
bądź niedroŜności tętnicy domózgowej po stronie przeciwnej, stąd moŜe być traktowany jako
powaŜna przesłanka o uruchomienia krąŜenia obocznego. W dobrze rozwiniętym krąŜeniu
obocznym parametr ten długo pozostaje w granicach normy.
Parametrami perfuzji, którym moŜna przypisywać wartości prognostyczne w ocenie
ewolucji niedokrwienia są według pracy [101] wartości wskaźników CBV i CBF:
-
ObniŜona wartość CBF przy prawidłowej lub podwyŜszonej wartości CBV
oznacza zazwyczaj prawidłowe uruchomienia mechanizmów autoregulacji w
obszarze objętym niedokrwieniem i pozwala oczekiwać, Ŝe nie ulegnie on
martwicy nawet w przypadku nie wystąpienia reperfuzji.
35
-
ObniŜenia wartości obu parametrów – CBF i CBV – rozpoznaje się zazwyczaj
jako strefę objętą ryzykiem niedokrwienia. JeŜeli wartości parametrów CBV i CBF
są bardzo niskie lub niemierzalne, dokonały się nieodwracalne zmiany martwicze.
Autorzy pracy [101] zalecają równieŜ łączne rozpatrywanie wartości parametrów MTT i
CBV:
-
WydłuŜenie MTT z jednoczesnym wzrostem CBV (wynikającym z rozszerzenia
naczyń i uruchomienia krąŜenia obocznego) odpowiada obszarowi penumbry
(strefy niedokrwienia) o zachowanej autoregulacji.
-
Zmniejszenie CBV przy jednoczesnym wydłuŜeniu MTT charakteryzuje
zazwyczaj centralną część strefy objętej niedokrwieniem, gdzie doszło do
martwicy komórek.
Przykładowe mapy perfuzyjne wraz z wystawionymi na ich podstawie diagnozami znajdują
się na rysunkach 2.14 oraz 2.15.
Rysunek 2.14 Trzy mapy p-TK (odpowiednio CBF, CBV i TTP), po prawej stronie zobrazowań znajduje się
skala (histogram), na podstawie którego w łatwy sposób lekarz moŜe zauwaŜyć asymetrię pomiędzy półkulami.
Po stronie lewej na poziomie górnych cz. trzonów komór bocznych na pograniczu czołowo-ciemieniowym oraz
na poziomie środków półowalnych, korowo i podkorowo widoczny znajduje się obszar o wym. 90x33mm,
wskazujący nieznaczne obniŜenie CBF (względnie 0,72), CBV (względnie 0.87) i przedłuŜenie TTP względnie
1,56) co moŜe odpowiadać początkowej fazie niedokrwienia lewej półkuli mózgu z dorzecza unaczynienia
tętnicy środkowej mózgu po stronie lewej. Rozpoznanie końcowe - zawał lewej półkuli mózgu. Źródło rysunku
[30].
36
Rysunek 2.15 Trzy mapy p-TK (odpowiednio CBF, CBV i TTP), w zakresie unaczynienia prawej tętnicy mózgu
środkowej widoczne zmniejszenie CBF (względnie 0,19 - 0,33), CBV (względnie 0,26 - 0,49), wydłuŜenie TTP
(względnie 1,05 - 1,07), co odpowiada udarowi. Rozpoznanie końcowe - zawał prawej półkuli mózgu, nastąpił
zgon pacjenta. Źródło rysunku [30].
Prawidłowy
poziom
perfuzji
mózgowej
jest
niezbędny
do
prawidłowego
funkcjonowania OUN. Wiele badań medycznych [101], [24], [3], [39], [59], [89], [50] zostało
wykonanych w celu stwierdzenia, czy istnieje korelacja pomiędzy wartościami wskaźników
perfuzji mózgowej a długo- i krótko terminowymi prognozami dla zmian zachodzących w
tkankach mózgowych. Ich wyniki zaprezentowane są w Tabeli 2.1.
Tabela 2.1 Średnie wartości parametrów perfuzji (CBF i CBV) oraz ich interpretacja według literatury [3], [24],
[39], [59], [101].
CBF ml/100 g/min CBV ml / 100g
Interpretacja
55 +-5
2.5 +- 0.5
Prawidłowa wartość perfuzji [101]
56.7 +- 12.4
2.4 +- 0.5
Prawidłowa wartość perfuzji [24]
<20
Dysfunkcja tkanek mózgowych [3]
< 10-12
Śmierć tkanek mózgowych [3]
0–10
0–1.5
Wartość graniczne niedokrwienia [39]
18 - 20
Dysfunkcja tkanek mózgowych [59]
< 10
Poziom perfuzji nie moŜe być tolerowany dłuŜej niŜ
kilka minut [59]
Śmierć tkanek mózgowych nastąpi w przedziale
kilkudziesięciu minut / godzin [59]
10 – 20
Pomimo niewielkich rozbieŜności autorzy oceniają, Ŝe średnia wartość CBF dla
zdrowych tkanek mózgowych wynosi 55 mL/100 g/min a dla CBV as 2.5 ml / 100g [24],
[101]. Dysfunkcja tkanek mózgowych zaczyna się, jeŜeli wartość wskaźnika CBF spadnie
poniŜej 20 mL/100 g/min [3], [39], [59]. Utrzymywanie się perfuzji w przedziale 10 – 20
mL/100 g/min moŜe spowodować śmierć tkanek mózgowych w ciągu najbliŜszych
kilkunastu/kilkudziesięciu godzin [59]. JeŜeli wartość wskaźnika CBF utrzymuje się przez
37
kilka minut na poziomie 10 mL/100 g /min następuje zawał, powodując nieodwracalne
uszkodzenia komórek neuronów [3], [39], [59].
Z powodu róŜnych czynników [49] prawdziwa wartość wskaźników CBF i CBV w
indywidualnych przypadkach moŜe zostać niedoszacowana w trudny do przewidzenia sposób.
Z tego powodu niektórzy autorzy preferują korzystanie ze względnych wartości CBF i CBV
(odpowiednio rCBF i rCBV). Według [49] moŜna - bez Ŝadnych ograniczeń - porównywać
względne wartości przepływu krwi w odpowiadających sobie regionach w lewej i prawej
półkuli mózgowej, poniewaŜ błędu pomiaru z obu stron zrównowaŜą się.
Tabela 2.2 Średnie wartości parametrów względnej perfuzji (rCBF i rCBV) oraz ich interpretacja według
literatury [50], [89].
ObniŜenie rCBF
rCBV
Interpretacja
0.60 - 0.70
Tkanki mogą zostać uratowane [89]
0.20 - 0.30
Tkanki zostaną objęte udarem [89]
0.62 +- 0.17
0.78 +- 0.18
Tkanki mogą zostać uratowane [89]
0.34 +- 0.20
0.43 +- 0.22
Tkanki zostaną objęte udarem [50]
0.48
0.60
Granica wyznaczająca rejon objęty udarem
(analiza dyskryminacyjna) [50]
Przy pomocy badań dynamicznej perfuzji TK moŜliwe jest wykrycie rejonów mózgu z
deficytem przepływu krwi zanim zostaną one uwidocznione na „klasycznych” (nie
zakontraktowanych) zobrazowaniach TK [89]. Rozmiar deficytu perfuzji uwidoczniony na pTK jest skorelowany z prognozami przebiegu choroby pacjenta. Autorzy w pracy [3]
stwierdzili, Ŝe obszar nieprawidłowego przepływu krwi widoczny na mapach CBV lepiej
prognozuje ostateczny rozmiar chorego obszaru niŜ w wypadku badania DWI RM. Według
[63] mapę CBV moŜna traktować jako aproksymację minimalnego obszaru, w którym
ostatecznie znajdą się tkanki objęte udarem.
Mapy CBF i CBV mają znaczenie prognostyczne w ocenie rozwoju niedokrwienia
mózgu [101]. W wielu przypadkach równoczesna analiza zarówno CBF jak i CBV umoŜliwia
dokładną analizę niedokrwienia wizualizowanych tkanek mózgowych. MoŜliwe jest równieŜ
przewidzenie dalszych zmian chorobowych perfuzji zarówno jakościowych (podobnie jak w
angiografii TK) jak i ilościowych.
Według [89], [108] wzrost CBV oznacza uruchomienie mechanizmów autoregulacji
krąŜenia, natomiast spadek CBV jest stanem niekorzystnym. CBF jest bardzo czułym
wskaźnikiem, którego spadek oznacza moŜliwość wystąpienia niedokrwienia.
38
W ostrym udarze niedokrwiennym w wypadku niskiego CBV moŜe wystąpić
zapadnięcie się naczyń krwionośnych, ale tylko po powaŜnej i trwającej przez długi okres
czasu
redukcji
wskaźnika
CBF.
Pogłębiające
się
zapadanie
naczyń
z
duŜym
prawdopodobieństwem oznacza zawał [63]. ObniŜenie CBF i CBV charakteryzuje obszar
zagroŜony zawałem. Bardzo niskie lub niemierzalne wartości CBF i CBV wskazują na trwałe
uszkodzenie komórek mózgowych w badanym obszarze.
2.4 Obecny stan wiedzy na temat automatycznych metod
diagnostyki zobrazowań perfuzyjnych mózgu
Z badań literaturowych autora wynika, Ŝe w obecnej chwili nie opracowano jeszcze w
pełni automatycznych metod komputerowej interpretacji zobrazowań dynamicznej perfuzji
TK mózgu. Zostały natomiast opracowane algorytmy dokonujące analizy zobrazowań
mózgowia pozyskiwanych z innych modalności (w tym równieŜ perfuzyjnych). System CAD
opisany w [71] pozwala na analizę potencjalnych zmian patologicznych zaznaczonych przez
uŜytkownika wskazujących na udar mózgu na trójwymiarowych zobrazowaniach RM.
Zobrazowania 3D RM są opisywane przy uŜyciu deformowalnego anatomicznego atlasu
mózgu i atlasu, na którym uwidocznione są główne arterie krwionośne mózgu. W celu
dopasowania obrazów uŜyty został algorytm FFT (Fast Talairach Transform) przygotowany
specjalnie dla zobrazowań RM [72]. Algorytm ten został opracowany jedynie dla zobrazowań
3D RM, polega na detekcji specjalnych „kluczowych punktów” w strukturze mózgu (tzw.
dopasowanie na podstawie analizy struktury obrazu – structural – based registration [99]).
Punkty te uŜyte są następnie przy wyznaczaniu współczynników transformacji sztywnej (rigid
transform) „szablonów” mózgu (brain templates).
W [56] autorzy korzystają ze specjalnie stworzonego atlasu mózgu w celu analizy map
perfuzji uzyskanych przy pomocy SPECT. W celu stworzenia atlasu autorzy zebrali pewną
liczbę zobrazowań perfuzyjnych SPECT, z których następnie został stworzy wzorcowy obraz
mózgowia na zasadzie uśrednienia wartości perfuzji występujących na kaŜdym z zobrazowań
(rysunek 2.16). Przed dokonaniem uśrednienia zobrazowania zostały odpowiednio
przekształcone, tak aby kaŜdy z mózgów był tego samego rozmiaru, a obraz był zorientowany
w tę samą stronę w przestrzeni jak pewien arbitralnie wybrane „referencyjne zobrazowanie”.
W tym celu uŜyto algorytmów dopasowania z zastosowaniem transformacji afinicznej oraz
39
algorytmu opartego na zasadzie „przepływu optycznego” (optical flow). Problem
dopasowania zobrazowań został szerzej omówiony w rozdziale 4 niniejszej dysertacji.
Rysunek 2.16 Proces tworzenia znormalizowanego atlasu perfuzji mózgowej przy pomocy algorytmów
dopasowania obrazów. Jedno spośród zestawu prawidłowych (nie posiadających zmian chorobowych)
zobrazowań SPECT, zostało wybrane jako zobrazowania referencyjne, pozostałe z nich zostały zorientowane w
przestrzeni w ten sam sposób. W wyniku uśrednienia wszystkich zobrazowań uzyskano wzorcowy obraz
zdrowego mózgu. Źródło rysunku [56].
W celu sprawdzenia, czy dane zobrazowanie zawiera zmiany chorobowe lub nie,
porównywane jest ono z wygenerowanym atlasem. JeŜeli róŜnice w intensywności pikseli
pomiędzy atlasem, a nowym zobrazowaniem są większe niŜ wyznaczony przez autorów
wartość graniczna, zobrazowanie uznawane jest za nieprawidłowe (zawierające zmiany
chorobowe). Podejście to pozwoliło autorom na uzyskanie dobrych rezultatów (91%
testowanych przypadków zostało prawidłowo sklasyfikowanych) wymaga ono natomiast
posiadania duŜego referencyjnego zbioru prawidłowych zobrazowań, które mogą posłuŜyć do
konstrukcji atlasu.
W pracy [7] autorzy zaprezentowali algorytm dedykowany dla map PWI i DWI
(badanie RM), który łączy w sobie metody dopasowania, segmentacji, filtrowania oraz
wizualizacji obrazów. W pierwszym etapie następuje integracja DWI i PWI we wspólnym
układzie współrzędnych przy pomocy algorytmów dopasowania obrazów. Drugim etapem
jest identyfikacja i pomiar chorych tkanek (następuje półautomatyczna segmentacja oparta na
progowaniu). Trzecim i ostatnim etapem jest analiza PWI z wykorzystaniem informacji
zgromadzonych w poprzednich krokach w celu wykrycia zmian chorobowych. Proces
segmentacja PWI jest nadzorowany przez lekarza radiologa.
W pracy [63] przedstawiono metodę wykrywania zmian patologicznych poprzez
detekcję asymetrii na zobrazowaniach TK i RM. Autor zaproponował tam następujący
algorytm: w pierwszym kroku dokonywana jest detekcja pionowej osi symetrii (jej jedyny
parametr obliczana jest jako średnia z x-owych współrzędnych punktów leŜących na brzegach
40
zobrazowania mózgu, nie bierze się zatem pod uwagę rotacja głowy pacjenta). Następnie
dokonywana jest binaryzacja, która ma na celu wyodrębnienie zmiany chorobowej. Progi
binaryzacji zostały wyznaczone poprzez analizę szerokości lokalnych minimów na
histogramie zobrazowania (binaryzacja z „oknem” – na obrazie wynikowym pozostają tylko
te piksele, których odcienie szarości znajdują się w przedziale wyznaczonym przez wartości
graniczne „okna”). Ostatnim etapem jest wyliczenie asymetrii przy pomocy odpowiednio
zdefiniowanej miary asymetrii dla poszczególnych symetrycznych obszarów mózgowia. Za
tkanki patologiczne uznawane są te, dla których miara asymetrii przekracza pewną
wyznaczoną przez autora wartość.
Pomimo Ŝe Ŝadna z tych metod nie dotyczy bezpośrednio dynamicznej perfuzji TK,
jednak pewne pomysły i spostrzeŜenia dokonane przez autorów stały się punktem wyjścia dla
badań autora tej rozprawy doktorskiej.
2.5 Charakterystyka zbioru badawczego zobrazowań
perfuzyjnych
W celu weryfikacji postawionej tezy dysertacji Autor przeprowadził badania na
zbiorze zobrazowań diagnostycznym. Wszystkie dane medyczne zostały uzyskane dzięki
uprzejmości Kierownika Zakładu Diagnostyki Obrazowej Uniwersytetu Jagiellońskiego prof.
dr hab. Andrzeja Urbanika. Do wygenerowania map został uŜyty software Syngo Neuro
Perfusion CT firmy Siemens [120], który jest uŜywany w tej jednostce w codziennej praktyce
medycznej.
Zbiór badawczy składa się z wyników badań uzyskanych dla 40 pacjentów z
podejrzeniem udaru mózgu. Dla kaŜdego z pacjentów wykonano badanie TK (w sumie 93
zobrazowania TK), dla 30 pacjentów wykonano badanie perfuzji mózgowej (w sumie 37
zobrazowań CBF i 37 zobrazowań CBV). Pomimo Ŝe głównym celem opracowanych metod
jest rozpoznawanie zmian chorobowych na mapach perfuzyjnych, zobrazowania TK 10
pacjentów, którzy nie mieli wykonanych badań perfuzyjnych zostały wykorzystane jako
dodatkowe dane przy weryfikacji poprawności algorytmu dopasowania obrazu opisanego w
rozdziale 5.4. Poza rozdziałem 5.4 zobrazowania medyczne tych pacjentów nie są
wykorzystywane.
41
Na 21 mapach CBF i CBV lekarz radiolog nie zauwaŜył Ŝadnych zmian chorobowych.
16 map CBF i 16 CBV wizualizują zmiany chorobowe. Wszystkie zmiany mają charakter
niedokrwienny, występują zarówno w lewej lub prawej półkuli mózgowej w róŜnych
częściach mózgowia oraz mają róŜną powierzchnię. Do kaŜdego z zobrazowań został
sporządzony opis przez lekarza radiologii uwzględniający charakter oraz połoŜenie zmian
chorobowych (o ile takie występują). Dla większości z pacjentów podano równieŜ ostateczne
rozpoznanie choroby: jest to udar lewej lub prawej półkuli mózgu lub przejściowe
niedokrwienie mózgowia.
Wszystkie zobrazowania zostały zapisane zgodnie ze standardem DICOM (Digital
Imaging and Communications in Medicine). Standard DICOM zdefiniowany jest dla róŜnych
warstw modelu ISO OSI dzięki czemu moŜe być uŜywany do wymiany informacji w
systemach telemedycznych [116]. W pliku DICOM oprócz zobrazowania medycznego
znajdują się dodatkowe informacje zapisane w formie tagów. W tagu o nazwie „PixelData”
znajdują się binarne dane zobrazowania. JeŜeli w tagu „PhotometricInterpretation” znajduje
się eykieta „MONOCHROME2” (tak jak w wypadku TK i mapy perfuzji, które znajdowały
się w zbiorze testowym), to mamy do czynienia z obrazem monochromatycznym, którego
kaŜdy piksel zapisany jest na dwóch bajtach i przeskalowany o czynnik, którego wartość
znajduje się tagu „RescaleIntercept” zgodnie ze wzorem:
A( x, y ) = AP ( x, y ) + ri (2.20)
Gdzie:
A( x, y ) - jest wartością piksela o współrzędnych x, y
AP ( x, y ) - jest wartością piksela o współrzędnych x, y odczytaną z pliku
ri - czynnik „RescaleIntercept”
W wypadku TK odczytane wartością naleŜy interpretować jako gęstość tkanek w skali
Hounsfielda, w wypadku map perfuzji jako wartości odpowiedniego parametru perfuzji. W
wypadku map CBF odczytywane wartości podane są w jednostkach ml / 100 g / min
natomiast CBV ml / 1000 g [120].
W wypadku kaŜdego z zobrazowań naleŜy równieŜ wziąć pod uwagę wartość tagu
„ReconstructionDiameter”; jest to podany w milimetrach rozmiar obszaru, który widoczny
jest na rekonstrukcji. Parametr ten moŜe zostać uŜyty do wyliczenia, jaka powierzchnia w
rzeczywistości reprezentowana jest przez jeden piksel zobrazowania.
42
P=
rd rd
⋅
(2.21)
n m
Gdzie:
rd - wartość Tagu „ReconstructionDiameter”
n, m – szerokość i wysokość zobrazowania (w pikselach)
Poza tymi informacjami w etykietach DICOM mogą być zapisane między innymi
informacje o ustawieniach tomografu podczas badania, wersji i producencie sprzętu oraz
oprogramowania, dacie i modalności badania (TK, RM, angioCT, ...) czy informacje o
pacjencie. Informacje te nie są wykorzystywane w prezentowanych tutaj metodach.
Mapy perfuzyjne są obrazami monochromatycznymi. Dla ułatwienia ich analizy przez
lekarzy są one zazwyczaj kolorowane w ten sposób, Ŝe obszary ciemne (poczynając od
czarnego przez niebieski do zieleni) oznaczają obszary o małych wartościach perfuzji
natomiast jasne (od zieleni przez Ŝółć do czerwieni) obszary o średnich i wysokich
wartościach perfuzji. Palety kolorów wykorzystywane w dalszej części dysertacji do
kolorowania map perfuzji przedstawione są na rysunku 2.17.
Rysunek 2.17 Palety kolorów uŜyte do kolorowania map (A) CBF, (B) CBV (podobnie jak w [120]).
43
3. Algorytm wykrywania zmian
chorobowych na mapach perfuzji mózgowej
Mimo określenia norm ilościowych dla parametrów perfuzji CBV i CBF zaleca się
stosowanie diagnostyki opartej na ocenie wartości względnych, uzyskanych na podstawie
analizy porównawczej symetrycznych obszarów zainteresowań ROI (Region of Interests) z
obu półkul mózgowych, uwidacznianych na poddawanych analizie zobrazowaniach. Analiza
taka polega na detekcji asymetrycznych obszarów o znaczącej wielkości i róŜnicy wartości
odpowiednich parametrów perfuzji (omówionych w rozdziale 2.3.3). W celu analizy
zobrazowania perfuzyjnego Autor zaproponował nowy, dwuetapowy algorytm:
- W pierwszej kolejności naleŜy wyznaczyć w badanym obrazie oś symetrii mózgowia
(podobnie jak w [120]), względem której nastąpi porównanie przepływu krwi w lewej
i prawej półkuli.
- Po wyznaczeniu osi symetrii następuje porównanie wartości perfuzji w lewej i
prawej półkuli i wyznaczenie potencjalnych obszarów chorobowych.
Aby ułatwić czytelnikowi wzrokową analizę wyników działania algorytmów, zobrazowania
perfuzyjne zostały pokolorowane przy uŜyciu palety kolorów przedstawionej na rysunku 2.17
(LUT – look-up table) zgodnie z zasadą opisaną w paragrafie 2.5.
3.1 Detekcja osi symetrii
Analizując zobrazowania perfuzyjne moŜna zauwaŜyć, Ŝe uwidoczniona na nich
głowa pacjenta jest odchylona o pewien kąt tzn. oś symetrii mózgu nie jest całkowicie
prostopadła do osi OX. W celu dokonania analizy asymetrii map przepływu krwi naleŜy
zatem najpierw wyznaczyć oś dzielącą obydwie półkule mózgowe (nazywaną w dalszej
części „osią symetrii”).
W praktyce diagnostycznej wyznaczenie takiej osi symetrii zazwyczaj dokonywane
jest manualnie (tak jak np. w [120]). Trudność z automatyzacją wykrywania tej osi wynika z
faktu, Ŝe badania perfuzyjne CT wykonuje się w róŜnych płaszczyznach poprzecznych
44
mózgu, stąd w zasadzie nie moŜna poczynić Ŝadnych ogólnych załoŜeń co do kształtu
otrzymanego zobrazowania. W znacznym stopniu utrudnia to takŜe zastosowanie
strukturalnych metod analizy obrazu, które zazwyczaj bardzo dobrze sprawdzają się przy
opisie róŜnorodnych zobrazowań medycznych [73].
Opracowana metoda detekcji osi symetrii zobrazowania CBF opiera się na pewnym
spostrzeŜeniu. JeŜeli pewien obiekt jest jednorodny (tzn. jego gęstość jest we wszystkich
punktach jednakowa) to jego środek masy pokrywa się z środkiem objętości [6]. Jeśli obiekt
ma oś symetrii, to przechodzi ona przez środek objętości, czyli jeŜeli obiekt ma oś symetrii i
jest jednorodne, to oś symetrii przechodzi przez środek masy. Oznacza to, Ŝe przyjmując
załoŜenia o jednorodności i symetrii obiektu moŜemy w pewnym przybliŜeniu oszacować,
gdzie znajduje się oś symetrii zadanego obiektu. Algorytm wyznaczania osi symetrii jest
zatem następującej postaci:
(a) Wyznaczenie prostokątnego okna (ROI) w obszarze zobrazowania, w którym znajduje
się mózgowie o współrzędnych:
x min = min x : I ( x, y ) > 0
xmax = max x : I ( x, y ) > 0
y min = min y : I ( x, y ) > 0
y max = max y : I ( x, y ) > 0
(b) Obliczenie liczby wierszy, z którego składa się ROI ( y max − y min ) a następnie
podzielenie obrazu na zadaną liczbę identycznych poziomych obszarów („pasów”), o
szerokości ROI (najlepsze rezultaty otrzymano dla podziału na 20 obszarów [34],
testowano podziały na od 2 do 512 obszarów). Dla kaŜdego z tych obszarów liczone
są współrzędne środka masy zgodnie z wzorem:
∫ ρ ⋅ x ⋅ dV
xm =
V
ym =
V
m
∫ ρ ⋅ y ⋅ dV
45
m
Gdzie:
0 gdy I ( x, y ) = 0
1 gdy I ( x, y ) > 0
ρ=
Przykładowe znalezione środki masy zaznaczone są na rysunku 3.2 A oraz rysunku
3.3 przy pomocy białych punktów.
(c) Otrzymany w ten sposób zbiór punktów został uŜyty do obliczenia osi symetrii
obiektu. Współczynnik kierunkowy i przesunięcia oszacowany został metodą
najmniejszych kwadratów. Aby poprawić jakość detekcji osi symetrii naleŜy
dodatkowo pominąć kilka pierwszych i ostatnich środków mas, poniewaŜ ich
połoŜenie zazwyczaj nie leŜy na osi symetrii (empirycznie stwierdzono, Ŝe naleŜy
pominąć 3 pierwsze i 3 ostatnie punkty) - wynika to z nieregularności brzegów
mózgowia na zobrazowaniach CBF. Znaleziona przez algorytm oś symetrii
zaznaczona jest na rysunku 3.2 i rysunku 3.3 przy pomocy białej linii. Zasadniczą
poprawę w ostatecznym obliczeniu środka masy moŜna uzyskać przez zastosowanie
dla kaŜdego z rozwaŜanych pasów, operacji morfologicznego zamknięcia obrazu
elementem strukturalnym o kształcie koła (rysunek 3.1) o relatywnie duŜych
rozmiarach (najlepsze wyniki osiągnięto dla elementu o średnicy 25 pikseli).
Origin
0
0
0
1
0
0
0
0 0
1 1
1R=31
1 1
1 1
1 1
0 0
1
1
1
1
1
1
1
0
1
1
1
1
1
0
0
1
1
1
1
1
0
0
0
0
1
0
0
0
Rysunek 3.1 Macierz pseudo – kołowego element strukturalnego dla przekształceń morfologicznych (promień
równy 3).
(d) Zobrazowanie jest obracane wokół punktu stałego obliczonego zgodnie z (3.1), tak,
aby oś symetrii była prostopadła do osi OX.
xc =
x2 + x1
2
yc =
y2 + y1
(3.1)
2
46
Punkt (x1 , y1 ) i (x2 , y 2 ) widoczny jest na rysunku 3.2 A, jest to pierwszy (patrząc od
góry rysunku) i ostatni punkt wspólny osi symetrii oraz mózgowia.
Wynik działania algorytmu widoczny jest na rysunku 3.2 B.
Rysunek 3.2 (A) Zobrazowanie CBF z zaznaczonymi kolejnymi środkami mas (białe punkty), przez punkty
przeprowadzona została prosta (potencjalna oś symetrii mózgu), której współczynniki przesunięcia i kierunkowy
zostały aproksymowane metodą najmniejszych kwadratów. (B) To samo zobrazowanie z wyznaczoną osią
symetrii.
Rysunek 3.3 Cztery zobrazowania CBF wraz z wykrytą osią symetrii. Górny rząd prezentuje znalezione środki
mas i potencjalną oś symetrii mózgu (podobnie jak na rysunku 3.2 A).
47
3.2 Detekcja asymetrii na mapach CBF i CBV
Pierwsza koncepcja tej metody detekcji asymetrii na mapach perfuzji została
przedstawiona przez autora w pracy [34] (dla map CBF), a kolejne jej udoskonalenia w
pracach [29] i [32] (rozszerzenie metody dla map CBV oraz TTP). W niniejszej dysertacji
przedstawiona zostanie jej ostateczna wersja, „zunifikowana” dla trzech wyŜej wymienionych
rodzajów map perfuzji. Wszystkie współczynniki występujące w tym algorytmie tj. rozmiar
okien filtrów, wartości progowania, zostały wyznaczone empirycznie. Celem algorytmu jest
wyznaczenie asymetrii o na tyle duŜych rozmiarach, aby mogły zostać ona uznane za
zaburzenia perfuzji krwi i zostały potraktowane jako symptomy patologiczne. Konieczność
taka wynika z faktu, Ŝe na mapach perfuzji mózgowej występują naturalne asymetrie nawet u
pacjentów, u których nie występują zaburzenia przepływu krwi (pacjenci zdrowi). Algorytm
posiada zatem jeden parametr adaptacyjny: wartość progową T dla operacji progowania, która
usuwa obszary o niewystarczająco duŜej róŜnicy względnej perfuzji. Dla map CBF i CBV
wartość T=60 (wartości taką wyznaczono empirycznie). Algorytm ten moŜe zostać równieŜ
wykorzystany do detekcji asymetrii na mapach TTP [32], wtedy wartość parametru T = 20.
PoniewaŜ mapa TTP nie była wykorzystywana przez autora w procesie oceny znaczenia
zmian
chorobowych
(omówionym
w
rozdziale
6)
nie
przeprowadzono
równieŜ
szczegółowych badań dotyczących skuteczności algorytmu dla tego rodzaju zobrazowań.
Tabela 3.1 Spis oznaczeń uŜytych w algorytmie.
Notacja przyjęta w algorytmie
Opis
I
Obraz binarny (wielka litera)
i
Obraz w odcieniach szarości (mała litera)
a
Mapa asymetrii
Floor
Zwraca największą wartość całkowitą, która nie
jest większa od wartości zadanej
Wypełnia puste obszary (“dziury”) występujące w
obszarach
Numeruje wszystkie jednolite obszary wchodzące
w skład obrazu binarnego
Binaryzaja, wartość 0 otrzymują wszystkie piksele
zobrazowania o wartościach < T, wartość 1
wszystkie piksele o wartościach > T
Morfologiczna erozja przy wykorzystaniu pseudo
– kołowego elementu o promieniu X.
Morfologiczna dylacja przy wykorzystaniu
pseudo – kołowego elementu o promieniu X.
Fill
Label
BinT
IΘE X
I ⊕ EX
48
Med YxY
Morfologiczne otwarcie przy wykorzystaniu
pseudo – kołowego elementu o promieniu X.
Morfologiczne zamknięcie przy wykorzystaniu
pseudo – kołowego elementu o promieniu X.
Filtracja medianowa, rozmiar okna filtru YxY.
A∩ B
Iloczyn logiczny obrazów A I B.
A∪ B
Suma logiczna obrazów.
I
Odbicie
lustrzane
obrazu
wyznaczonej osi symetrii
I o EX
I • EX
I
względem
Algorytm wykrywający asymetrie perfuzji wykorzystuje równieŜ jedno z zobrazowań
TK, z grupy zobrazowań, które zostały uŜyte do wygenerowania AIF i w efekcie otrzymania
map perfuzji (patrz rozdział 2.3.2). Powinno zostać wyselekcjonowane takie zobrazowanie
TK, które nie posiada Ŝadnych artefaktów ruchowych, które mogą powstać na skutek
poruszenia głową przez pacjenta w trakcie badania. Przed rozpoczęciem procesu detekcji
asymetrii, w algorytmie naleŜy dokonać „de – skalpowania” tzn. usunięcia z obrazu struktur,
które nie są częścią mózgu, czyli na przykład czaszki oraz skóry (“de - scalping” [82]).
Autorski algorytm opracowany i uŜyty przez autora w celu ekstrakcji struktur
mózgowia (de – skalpowania) działa w następujący sposób:
-
Odnalezienie tkanek kostnych na zobrazowaniu TK (poprzez przeprowadzenia
prostego progowania);
-
Odnalezienie tkanek, które nie są tkankami kostnymi (operacja progowania);
-
Obrazem wynikowym są wszystkie niekostne tkanki znajdujące się wewnątrz
zamkniętego obszaru ograniczonego przez tkankę kostną.
Przykładowe wyniki algorytmu widoczne są na rysunku 3.4.
49
Rys 3.4 Przykładowe wyniki algorytmu ekstrakcji struktur mózgowia. (A) zobrazowania mózgu przed (B) po
dokonaniu de – skalpowania.
Algorytm wykrywający asymetrie map perfuzji działa według poniŜszego schematu:
(a) Wczytanie mapy perfuzji (na rysunku jest to mapa CBF) i zobrazowania TK (jedno z
zobrazowań TK, które zostało uŜyte do wygenerowania AIF ) rysunek 3.5 A, B.
(b) Wykonanie de – skalpowania zobrazowania TK - rysunek 3.5 C.
Rysunek 3.5 (A) mapa CBF, (B) zobrazowanie TK, (C) zobrazowanie TK po operacji de – skalpowania (D)
maksymalna maska mózgowia (opis w tekście).
50
(c) Detekcja osi symetrii przy uŜyciu algorytmu przedstawionego w paragrafie 3.1 rysunek 3.6 A.
(d) Redukcja liczby odcieni szarości na mapie perfuzji. W efekcie tego kroku uzyskiwane
są jednolite obszary oddzielone od siebie wyraźną granicą po obu stronach osi
zobrazowań. Operacja ta jest bardzo istotna dla kolejnych kroków algorytmu – w
kroku (e) filtracja medianowa wygeneruje jednolite obszary posiadające tą samą
perfuzję (juŜ bez pojedynczych pikseli/artefaktów utrudniających dalszą analizę)
oddzielone od siebie wyraźną granicą. Bez wykonania operacji (d) granice pomiędzy
obszarami z róŜnymi wartością perfuzji będą rozmyte, co znacznie utrudnia wykrycie
obszarów asymetrii przepływu krwi - rysunek 3.6 B. Operację tę moŜna zapisać jako:
i ( x, y ) := Floor ((i ( x, y ) / 15) * 15)
(e) Filtracja medianowa przy uŜyciu okna o rozmiarze 15 x 15 pikseli. W wyniku filtracji
mapa perfuzji zostaje pozbawiona pewnych szczegółów (ulega rozmyciu), których
obecność znacznie utrudnia analizę, poniewaŜ powodowałyby one w dalszych krokach
generowanie znacznej liczby niewielkich obszarów asymetrii. JeŜeli na zobrazowaniu
zostaje wykryta zbyt duŜa liczba małych obszarów asymetrii, prawidłowa ich
klasyfikacja, na te, które są obszarami chorobowymi i te, które są naturalnymi
asymetriami, moŜe okazać się niemoŜliwa. NaleŜy podkreślić, Ŝe w podobny sposób
mapy perfuzji analizowane są przez lekarza: nie analizuje on kaŜdego piksela mapy,
lecz zwraca głównie uwagę na duŜe, asymetryczne obszary róŜniące się kolorem
(perfuzją), w ramach których mogą znajdować się mniejsze obszary (nawet
pojedyncze piksele) z prawidłową perfuzją - rysunek 3.6 C. Operację filtracji moŜna
zapisać jako:
i := Med 15 x15 (i )
Rysunek 3.6 (A) – detekcja osi symetrii, (B) - redukcja liczby odcieni, (C) - filtracja medianowa.
51
Rysunek 3.7 Porównanie symetrycznych obszarów w lewej i prawej półkuli mózgowia podczas generowanie
mapy asymetrii (opis w tekście).
(f) Porównanie symetrycznych obszarów w lewej i prawej półkuli mózgowia. W wyniku
porównania otrzymywana jest mapa asymetrii. Generowanie mapy asymetrii
przebiega według poniŜszego schematu:
-
Dla kaŜdego piksela i ( x, y ) , który naleŜy do lewej połowy zobrazowania,
sprawdzamy, czy i ( x, y ) > 0 lub czy wartość symetrycznego piksela
(względem osi symetrii wykrytej w kroku (c)) po prawej stronie
zobrazowania spełnia i ( x, y ) > 0
o JeŜeli i ( x, y ) = 0 i i ( x, y ) = 0 , piksel naleŜy do tła zobrazowania (rysunek
3.7 A).
o W przeciwnym wypadku zachodzi jeden z poniŜszych przypadków
•
JeŜeli i ( x, y ) > 0 i i ( x, y ) = 0 lub i ( x, y ) = 0 i i ( x, y ) > 0 wtedy
jeden z pikseli naleŜy do obszaru mózgowia (poniewaŜ
występuje tam perfuzja) a drugi z pikseli moŜe naleŜeć albo do
tła zobrazowania (rysunek 3.7 (B), para punktów E - F moŜe tak
się zdarzyć w wypadku nieprawidłowego ustawienia osi
symetrii oraz z faktu niesymetryczności mózgowia) lub drugi z
pikseli naleŜy do obszaru mózgowia, natomiast perfuzja w tym
obszarze jest bardzo mała (rysunek 3.7 B, para punktów C - D).
•
JeŜeli i ( x, y ) > 0 i i ( x, y ) > 0 oba piksele naleŜą do obszaru
mózgowia (rysunek 3.7 C).
o Dla kaŜdego piksela, który naleŜy do obszaru mózgowia, obliczana jest
wartość względnej asymetrii perfuzji, która zostaje następnie umieszczona
na mapie asymetrii:
52
•
JeŜeli i ( x, y ) > i ( x, y )
i ( x, y )
a ( x, y ) := Floor 10 ⋅
i ( x, y )
•
W przeciwnym wypadku:
i ( x, y )
a ( x, y ) := Floor 10 ⋅
i
(
x
,
y
)
JeŜeli któryś z pikseli i ( x, y ) lub i ( x, y ) ma wartość 0, podstawiane jest 1.
o Oś symetrii otrzymana w punkcie (c) moŜe zostać wyznaczona z pewnym
błędem, jak równieŜ obszar zobrazowania perfuzyjnego moŜe być
niesymetryczny. W wyniku powyŜszych czynników na mapie asymetrii
moŜe znaleźć się obszar mózgowia leŜący na samym brzegu zobrazowania
(poniewaŜ został porównany z obszarem nie będącym częścią mózgowia
po przeciwnej stronie zobrazowania, dla którego perfuzja wynosiła 0).
Sytuacja ta widoczna jest na rysunku 3.7 D. W celu zminimalizowania tego
niekorzystnego efektu tworzona jest maska binarna maska mózgowia 3.5
(D) (oznaczona poniŜej jako „P”), w której wypełnia się wszystkie
ewentualne puste przestrzenie.
P := Bin1 (TK )
P := Fill ( P )
JeŜeli dla piksela P ( x, y ) = 0 lub symetrycznego P ( x, y ) = 0 piksel ten jest
usuwany z wynikowej mapy asymetrii (poniewaŜ porównano względna
perfuzję obszaru będącego częścią mózgowia z obszarem nie będącym jego
częścią) - rysunek 3.8 A.
Rysunek 3.8 (A) – mapa asymetrii, (B) mapa asymetrii po dokonaniu progowania, (C) mapa asymetrii po
eliminacji „wąskich połączeń”, (D) mapa asymetrii po eliminacji małych obszarów, (E) wykryty obszar
asymetrii zaznaczony na zobrazowaniu CBF.
53
(g) Filtracja mapy asymetrii w celu wykrycia obszarów o dostatecznie duŜej względnej
róŜnicy perfuzji. Filtracja dokonywana jest przez progowanie z wartością graniczną
T = 60 (na mapie asymetrii a pozostają tylko piksele o wartościach większych niŜ T).
T jest parametrem adaptacyjnym algorytmu i zaleŜy od typu mapy perfuzji (patrz
początek rozdziału 3.2) - rysunek 3.8 B.
A := BinT ( a )
(h) Eliminacja „wąskich połączeń” pomiędzy obszarami asymetrii dokonywana jest przy
pomocy morfologicznego otwarcia z wykorzystaniem pseudo – kołowego elementu o
promieniu 3 - rysunek 3.8 C.
A := A o E3
(i) Ostatnim krokiem algorytmu słuŜącego do otrzymania obszaru asymetrii jest
eliminacja obszarów, które są zbyt małe, Ŝeby mogły być uznane ze deficyty perfuzji.
W tym celu dokonywana jest erozja z wykorzystaniem pseudo – kołowego elementu o
promieniu 10. Na obrazie wynikowym zostają umieszczone w całości tylko te obiekty,
których fragment był widoczny po dokonaniu otwarcia - rysunek 3.8 D.
l := Label ( A)
A' := AΘE10
JeŜeli A' ( x, y ) > 0 dodaj cały obszar o etykiecie l ( x, y ) do wynikowej mapy asymetrii
A.
(j) Wykryty obszar asymetrii zaznaczony na zobrazowaniu CBF. Symetryczny obszary
zaznaczone są w obu półkulach mózgowych - rysunek 3.8 E.
Wyniki działania algorytmu dla przykładowych map CBF i CBV przedstawione są na
rysunku 3.9. NaleŜy zwrócić uwagę, Ŝe algorytm wykrywa symetryczny obszar w lewej i
prawej półkuli mózgowej, natomiast nie daje odpowiedzi, który z wykrytych obszarów (ROI
– region of interest) definiuje obszar o niewłaściwej perfuzji. W celu stwierdzenia, z jaką
zmianą mamy do czynienia (krwotoczną czy niedokrwienną) oraz w której półkuli mózgowia
jest ona usytuowana (określenie typu zmiany chorobowej) konieczne jest wyliczenie
parametrów perfuzji oraz porównanie ich z normami podanymi w literaturze. Proces
obliczania parametrów perfuzji opisany jest w kolejnym rozdziale, natomiast algorytmy
oceniające znaczenia zmian chorobowych opisane są w rozdziale 6.
54
55
Rysunek 3.9 Przykładowe pary mapy CBF (po lewej w kaŜdej parze) i CBV (po prawej) z wykrytymi obszarami asymetrii
zaznaczonymi jako białe pola.
3.3 Wyznaczanie wartości parametrów perfuzji
Po dokonaniu detekcji obszaru zaburzeń perfuzji lekarz dokonuje oceny rozmiaru
obszaru chorobowego oraz innych istotnych z medycznego punktu widzenia parametrów.
Algorytm zaproponowany przez autora pozwala na obliczenie:
-
Powierzchni obszaru zmian chorobowych S. Dokonuje się tego poprzez zliczenie
liczby pikseli N wchodzących w skład ROI i skorzystanie z współczynnika (2.21),
stąd:
S = P⋅N
-
Średnich wartości CBF i CBV w obszarze zmian chorobowych jak i w obszarze
symetrycznym do tego obrazu, znajdującym się w drugiej półkuli. Wartości CBF i
CBV mogą zostać odczytane wprost z map perfuzji (w jednostkach odpowiednio ml /
100 g / min i ml / 1000 g). Przez średnią wartość perfuzji rozumiana jest suma
wartości parametrów perfuzji w poszczególnych pikselach ROI podzielona przez
liczbę pikseli ROI.
∑ CBF
i
CBF =
i ⊂ ROI
CBV =
i ⊂ ROI
S
∑ CBV
i
-
S
Względna wartość perfuzji CBF i CBV:
o Stosunek perfuzji w lewym ROI do perfuzji w prawym roi
rCBFL / P =
CBFL
CBFP
rCBV L / P =
CBVL
CBVP
o Stosunek perfuzji w prawym ROI do perfuzji w lewym roi
rCBFP / L =
CBFP
CBFL
rCBVP / L =
CBVP
CBVL
Znajomość tych wartości w połączeniu z doświadczeniem diagnostycznym specjalisty
w interpretowaniu map perfuzji mózgowych oraz wiedzą o prawidłowych wartościach
56
poszczególnych parametrów i ich właściwościach prognostycznych (zagadnienia omówiono
w paragrafach 2.3.3 i 2.3.4) pozwala na rozpoznanie rodzaju zmian chorobowych
uwidocznionych podczas badania. Wiedza medyczna oraz ilościowe wyniki analizy
zobrazowania pozwalają lekarzowi prawidłowo zinterpretować (zrozumieć) wynik badania.
Autorska propozycja algorytmu automatycznej oceny zmian chorobowych zostanie
przedstawiona w rozdziale 6, natomiast architektura kompletnego systemu interpretującego
(„rozumiejącego” [74]) mapy perfuzyjne w rozdziale 7 niniejszej rozprawy.
3.4 Ocena skuteczności działania algorytmu detekcji asymetrii
Opisany algorytm wykrywania asymetrii został przetestowany na całym zbiorze
testowym opisanym w paragrafie 2.5 tej rozprawy (tzn. 37 mapach CBF i 37 mapach CBV,
które pochodzą od dorosłych pacjentów (zarówno męŜczyzn i kobiet) z podejrzeniem udaru
mózgu). Dodatkowe zobrazowanie TK, konieczne do uruchomienia metody, zostało wybrane
spośród obrazów wygenerowanych podczas badania perfuzyjnego. Otrzymane wyniki
(obszary potencjalnych asymetrii) zostały następnie porównane z opisami map perfuzji
sporządzonymi przez specjalistę radiologa. Implementacja algorytmu wykonana przez autora
daje moŜliwości wykrycia osi symetrii w czasie krótszym niŜ 1 sekunda. Natomiast wykrycie
obszarów asymetrii trwa od około 2 do 5 sekund (czas zaleŜy od wielkości obszarów
asymetrii – im większy obszar tym dłuŜej wykonują się obliczenia związane z operacjami
morfologicznymi, procedurą zapełniania otworów oraz numeracją obszarów) na procesorze
Intel Core 2 Duo 3 GHz CPU, 3,25 GB RAM.
Celem weryfikacji algorytmu było sprawdzenie, czy algorytm wykrywa asymetrie na
mapach CBF i CBV, które zawierają zmiany chorobowe, oraz czy wykryte przez algorytm
obszary pokrywają się z oceną lekarza. JeŜeli algorytm nie wykrył obszarów zaburzeń
perfuzji lub jeŜeli umiejscowił je w nieprawidłowym miejscu traktowane to było jako błąd
rozpoznania. Rezultaty otrzymane w wyniku tego testu zostały podsumowane zgodnie z
terminologią podaną w tabeli 3.2.
57
Tabela 3.2 Klasyfikacja rezultatów działania algorytmu w zaleŜności od obecności/braku zmian (na podstawie
[4]).
Stan rzeczywisty
Obecność zmian
Brak zmian
dodatni
Wynik testu na obecność zmian Obecność zmian Prawdziwie dodatni Fałszywie
(ang. true positive) (ang. false positive)
chorobowych oraz ich połoŜenie
Fałszywie ujemny Prawdziwie ujemny
Brak zmian
(ang. false (invalid) (ang. true (accurate)
negative)
negative)
Według [4] podczas interpretacji kolejnych przypadków mogą pojawić się cztery róŜne
rezultaty:
Prawdziwie dodatni (ang. true positive, TP) – algorytm wykrył zmianę chorobową zgodnie z
opisem medycznym
Fałszywie dodatni (ang. false positive, FP) – algorytm wykrył zmiany chorobowej na obrazie
prawidłowym, bądź umieścił ją w niewłaściwym miejscu
Prawdziwie ujemny (ang. true negative, TN) – algorytm nie wykrył zmiany chorobowym na
mapie perfuzji, która została zdiagnozowana jako prawidłowa
Fałszywie ujemny (ang. false negative, FN) – algorytm nie wykrył zmiany chorobowej na
zobrazowaniu perfuzyjnym posiadającym zmiany chorobowe.
Wyniki testu dla algorytmu, który korzysta z automatycznie wykrytej osi symetrii (w
pełni automatyczna detekcja), zostały przedstawione w tabeli 3.3. W tabeli 3.4 znajdują się
wyniki algorytmu, który korzysta z osi symetrii, której pozycja w niektórych przypadkach
została skorygowana manualnie (półautomatyczna detekcja).
Tabela 3.3 Wyniki w pełni automatycznej detekcji (bez manualnej korekcji pozycji osi symetrii).
Stan rzeczywisty
Obecność zmian
Brak zmian
21
Wynik testu na obecność zmian Obecność zmian 11
chorobowych oraz ich połoŜenie
14
28
Brak zmian
Wyznaczono współczynniki oceniające w jakich przypadkach algorytm popełnia największe
błędy:
Współczynnik fałszywie dodatni (stosunek liczby przypadków, w których pomimo
występowania zmian chorobowych algorytm nie wykrył zmian bądź wykrył je w
nieprawidłowym miejscu do wszystkich przypadków, na których widoczne są zmiany
chorobowe):
58
FPR =
FP
⋅ 100% ≈ 65.6%
FP + TP
Współczynnik fałszywie ujemny (stosunek liczby przypadków, w których algorytm wykrył
zmiany chorobowe, pomimo, Ŝe według diagnozy są one prawidłowe do wszystkich
przypadków, na których nie są widoczne Ŝadne zmiany chorobowe):
FNR =
FN
⋅100% ≈ 33.3%
FN + TN
Automatyczna detekcja
28%
38%
19%
FP
FN
TP
TN
15%
Rysunek 3.10 Graficzne przedstawienie wartości współczynników z tabeli 3.3, oceniających działanie w pełni
automatycznego algorytmu detekcji asymetrii na zbiorze testowym map CBF i CBV.
Ogólny współczynnik błędu (ang. total error rate - proporcja liczby błędnych ocen algorytmu
do liczby wszystkich zobrazowań testowych):
TER =
FN + FP
= 47.3%
FP + TP + FN + TN
Prawidłowo zostało wykrytych (ang. total true deteciotn rate):
TTDR = 100% − TER = 52.7%
59
Automatyczna detekcja
47%
53%
TER
TTDR
Rysunek 3.11 Graficzne przedstawienie wartości współczynników TER i TTDR oceniających działanie
algorytmu w pełni automatycznej detekcji.
Z łatwością moŜna zauwaŜyć, Ŝe algorytm automatycznie wykrywający oś symetrii
(ADOSM - automatic detection of symmetry axis algorithm) moŜe zostać uŜyty jedynie jako
narzędzie wspomagające późniejszy manualny proces ustawienia osi symetrii. Wysoka
wartość współczynnika FPR jest spowodowana głównie poprzez wykrywanie nadmiarowych
obszarów asymetrii (najczęściej są to dodatkowe obszary blisko osi symetrii zobrazowania
lub na dole lub górze mapy perfuzji – takie nieprawidłowe obszary występujące blisko osi są
na przykład widoczne na rysunku 3.9 w prawej dolnej parze zobrazowań CBF i CBV).
Zaproponowany algorytm ADOSM moŜe być bardzo pomocny na początku procesu
wykrywania zaburzeń perfuzji mózgowej, poniewaŜ jego wykonanie jest bardzo szybkie a
wartość współczynnika nachylenia zaproponowanej osi symetrii wyznacza linię róŜniącą się
od „rzeczywistej osi” zazwyczaj jedynie o parę stopni. NaleŜy jednak pamiętać, Ŝe w duŜej
części przypadków manualna korekcja połoŜenia osi jest niezbędna.
Tabela 3.4. Wyniki półautomatycznej detekcji (w niektórych przypadkach dokonano manualnej korekcji pozycji
osi symetrii).
Stan rzeczywisty
Obecność zmian
Brak zmian
23
9
Wynik testu na obecność zmian Obecność zmian
chorobowych oraz ich połoŜenie
8
34
Brak zmian
Podobnie jak poprzednim przypadku wyznaczono współczynniki oceniające w jakich
przypadkach algorytm popełnia największe błędy:
FPR =
FP
⋅ 100% ≈ 28.1%
FP + TP
60
FNR =
FN
⋅100% ≈ 19.0%
FN + TN
Półautomatyczna detekcja
12%
FP
FN
11%
46%
TP
TN
31%
Rysunek 3.12 Graficzne przedstawienie wartości współczynników z tabeli 3.4, oceniających działanie
półautomatycznego algorytmu detekcji asymetrii na zbiorze testowym map CBF i CBV.
TER =
FN + FP
= 23.0%
FP + TP + FN + TN
TTDR = 100% − TER = 77.0%
Półautomatyczna detekcja
23%
TER
77%
TTDR
Rysunek 3.13 Graficzne przedstawienie wartości współczynników TER i TTDR oceniających działanie
algorytmu półautomatycznej detekcji.
Algorytm półautomatycznej detekcji uzyskał znacznie lepsze rezultaty od poprzedniej
wersji algorytmu. 77.0% testowanych zobrazowań zostało prawidłowo sklasyfikowanych a
61
wykryte obszary zaburzeń perfuzji pokrywały się z opisem medycznym. Dla badanego zbioru,
wartość współczynnika FPR jest wyŜsza od wartości TNR. Wynik to z faktu, Ŝe trudniejszym
zadaniem jest zidentyfikowanie obecności zmiany chorobowej i oszacowanie jej pozycji
(czego błąd mierzy FPR) niŜ odrzucenie hipotezy o obecności zmiany chorobowej (czego
błąd mierzy FNR). Błędy spowodowane były głównie (podobnie jak w wypadku w pełni
automatycznej detekcji) przez wykrywanie nadmiarowych obszarów asymetrii (najczęściej są
to dodatkowe obszary blisko osi symetrii zobrazowania lub na dole / górze mapy perfuzji)).
62
4. Techniki dopasowania zobrazowań
Dopasowanie obrazu (ang. image registration) jest procesem polegającym na dobraniu
parametrów transformacji geometrycznej, która dopasuje do siebie dwa zobrazowania w taki
sposób, aby róŜnica pomiędzy tymi zobrazowaniami (wyraŜona przy pomocy pewnej funkcji)
została zminimalizowana [69]. Innymi słowy celem dopasowania jest minimalizacji zadanej
funkcji błędu (lub maksymalizacji funkcji podobieństwa) pomiędzy dwoma zobrazowaniami
tj.: obrazem wzorcowym nazywanym teŜ obrazem nieruchomym/statycznym (SI - static
image) a nowym obrazem - obrazem ruchomym (MI - moving image).
Proces dopasowania obrazu realizowany jest najczęściej na zasadzie odnajdowania
podobnych obszarów na obrazie statycznym i ruchomym a następnie przemieszczania tego
obszaru na MI tak, aby przestrzenna pozycja obszaru na SI i MI była jednakowa. W wyniku
działania algorytmu dopasowania obrazu otrzymujemy transformację T, która kaŜdemu
punktowi SI przypisuje odpowiadający mu punkt na MI.
Zostało opracowane wiele algorytmów dopasowania obrazów. Istnieje równieŜ wiele
sposobów klasyfikacji tych algorytmów w zaleŜności od uwzględnianych w nich kryteriów
[26]. Z punktu widzenia tej rozprawy najbardziej istotne są dwa przedstawione poniŜej
kryteria podziałów.
Podział ze względu na liczbę stopni swobody transformacji obrazu:
-
Dopasowanie obrazów przy uŜyciu transformacji ze względnie niewielką liczbę stopni
swobody (poniŜej kilkuset parametrów). Ten rodzaj transformacji uŜywany jest do
dokonywania fuzji zobrazowań prezentujących róŜne modalności, pochodzących od
róŜnych pacjentów [26].
-
Dopasowanie obrazów przy uŜyciu transformacji z duŜą liczbą stopni swobody (model
przepływu optycznego (optical flow), ciała elastycznego, płynu lub dyfuzji z setkami
tysięcy parametrów). Algorytmy z tej grupy uŜywane są najczęściej w celu badania
procesów zmian poszczególnych organów w ciele pacjenta bądź badania róŜnic
anatomicznych pomiędzy róŜnymi pacjentami [85].
Autor tej rozprawy w swoich badaniach naukowych wziął pod uwagę algorytmy naleŜące do
obydwu tych grup.
63
Drugi podział; ze względu na sposób obliczenia parametrów algorytmu:
-
Podejście oparte na badaniu intensywności odcieni szarości pikseli (intensity - based
approach). Rozwiązanie to nie wymaga wcześniejszej segmentacji dopasowywanych
obrazów.
-
Podejście oparte na modelu dopasowywanych obiektów (model – based approach). W
tym wypadku konstruowany jest model dopasowywanych obiektów i selekcjonowany
jest zbiór odpowiednich punktów. W procesie dopasowania połoŜenie tych punktów
odnajdowane jest na obrazach ruchomych oraz statycznych, a na podstawie ich
współrzędnych wyznaczane są parametry transformacji. Podejście to wymaga
segmentacji dopasowywanych obrazów. Model ten wykorzystywany jest na przykład
w [72].
PoniewaŜ podejście oparte na modelu dopasowywanych obiektów nie zostało
wykorzystane w rozprawie doktorskiej, w dalszej części pracy zostaną omówione tylko
algorytmy oparte na badaniu intensywności odcieni szarości pikseli.
W kolejnych rozdziałach omówione zostaną algorytmy dopasowania z zastosowaniem
transformacji afinicznej opartej na metodzie simplexów Neldera – Meada, algorytm FFD oraz
algorytm Thiriona. Te trzy metody są reprezentantami róŜnych grup modeli dopasowania
(mają od kilku w wypadku modelu afinicznego, kilkuset – FFD do kilku tysięcy stopni
swobody w wypadku algorytmu Thiriona) i zostały wyselekcjonowane przez autora jako te,
które mogą zaoferować najlepsze rozwiązanie problemu dopasowania obrazu na potrzeby
konstrukcji atlasu mózgu. Wybór ten został podyktowany przeglądem literatury z
uwzględnieniem wyników otrzymanych przez poszczególnych autorów. Kilka innych
popularnych modeli dopasowania zostanie zasygnalizowane w rozdziale 4.4 w celu pełnego
przedstawienia tematu.
Przed dokonaniem dopasowania zobrazowań mózgowia dokonuje się zazwyczaj „de –
skalpowania” – tzn. usunięcia z zobrazowania tkanek, które nie są częścią mózgu, na przykład
czaszki oraz tkanek skóry (“de - scalping” [82]). Dokonuje się tego zarówno dla obrazu
ruchomego jak i statycznego. Autorski algorytm uŜyty przez autora tej dysertacji w celu de –
skalpowania został opisany w rozdziale 3.2 tej dysertacji.
W niektórych przypadkach przed lub podczas procesu dopasowania dokonuje się
przeskalowania zobrazowań w celu przyspieszenia działania algorytmu. Autor dysertacji
uŜywał do tego celu algorytmu interpolującego wartości pikseli na podstawie wartości pikseli
64
najbliŜszych sąsiadów (NNI, nearest-neighbor interpolation [91]). Algorytm ten działa w
następujący sposób:
-
Dla zobrazowania wejściowego Iin o wymiarach N x M określ wartość czynnika
skalującego scale (określającego jaką część obrazu wejściowego ma stanowić
obraz wynikowy), np. scale = 0.3
-
Określ rozmiar zobrazowania wynikowego N’ x M’ zgodnie ze wzorem:
N ' = N ⋅ scale
M ' = M ⋅ scale
-
Określ krok interpolacji dla wierszy i kolumn:
div = max( N ' , M ' ,1) ;
sN = N / div ;
sM = M / div
-
Wartość koloru kaŜdego z pikseli obrazu wynikowego Iout o współrzędnych
(a1, b1) równa jest wartości koloru najbliŜszego piksela z obrazu wejściowego
o współrzędnych
(a , b) zgodnie z algorytmem:
a1 := 0 ;
//Pętla wykonuje się tyle razy, ile jest wierszy w macierzy (obrazie) Iout.
For a:=sN / 2 to N (krok: a + scN)
BEGIN
//Pętla wykonuje się tyle razy, ile jest kolumn w macierzy (obrazie) Iout.
For b := sM / 2 to M (krok: b + scM)
BEGIN
b1 := 0 ;
//Wartości zmiennych a i b określają pozycję piksela (odpowiednio wiersz
// i kolumnę) obrazu I in , który posłuŜy do interpolacji wartości piksela
//obrazu Iout
I out (a1, b1) := I in (a , b ) ;
b1:=b1+1;
END
a1:=a1 + 1;
END
65
I in
4.1 Metody transformacji globalnej
4.1.1 Transformacja afiniczna
Jedną z najprostszych metod dopasowania obrazów moŜna uzyskać poprzez
zastosowanie transformacji afinicznej [84].
W przestrzeni R 3 transformatę afiniczną moŜna zapisać jako:
x'
x
y ' = A ⋅ y + b
z '
z
(4.1)
Gdzie:
a11
A = a 21
a 31
a12
a 22
a 32
a13
b1
a 23 , b = b2 (4.2)
a 33
b3
JeŜeli b = 0 równanie (4.2) staje się równaniem transformacji liniowej.
Wiele popularnych transformacji przestrzennych moŜe być zapisanych w postaci
transformacji afinicznej. W przestrzeni R 2 macierz odpowiadająca za skalowanie jest postaci:
0
, b = 0 (4.3)
s 22
s
AS = 11
0
x ' = s11 ⋅ x
y ' = s 22 ⋅ y
Macierz odpowiadająca za rotację:
cos θ
AR =
− sin θ
sin θ
, b = 0 (4.4)
cos θ
x ' = x ⋅ cosθ − y ⋅ sinθ
y ' = x ⋅ sinθ − y ⋅ cosθ
66
Macierz odpowiadająca za translację:
1 0
At =
, bt = (t1 , t2 ) (4.5)
0 1
x ' = x + t1
y' = y + t2
Wszystkie
te
transformacje
mogą
zostać
zastąpione
przez
iloczyn
macierzowy
poszczególnych macierzy transformacji:
x'
y ' = AR ⋅ At ⋅ AS
x
⋅ + bt
y
(4.6)
PowyŜsze transformacje w przestrzeni R 2 mają pięć stopni swobody:
d = [s11 , s 22 , θ , t1 , t 2 ] (4.7)
Przez I ' oznaczmy obraz będący wynikiem transformaty afinicznej obrazu I. W celu
znalezienia optymalnej transformaty afinicznej z parametrami d (ze względu na proces
dopasowania obrazu) naleŜy zdefiniować funkcję błędu, którą naleŜy zminimalizować:
f ( d ) = r (I ' , I ref ) (4.8)
Gdzie:
r(A,B) jest funkcją błędu mierzącą róŜnicę pomiędzy obrazami A, B.
Funkcja r(A,B) moŜe zostać zdefiniowana przy pomocy współczynnika korelacji pomiędzy
zobrazowaniami:
r ( A, B ) = 1 − CC ( A, B )
∑∑ (A
N
M
ij
CC ( A, B) =
− A)⋅ (Bij − B )
i =1 j =1
N M
N M
∑∑ (Aij − A)2 ⋅ ∑∑ (Bij − B )2
(4.9)
i =1 j =1
i =1 j =1
Gdzie:
A, B – macierze R 2 o tych samych wymiarach,
A, B - wartość średnia elementów macierzy.
N, M – wymiary obrazu
67
W celu minimalizacji r(A,B) autor uŜył metody simplexów Nelder’a – Mead’a [55], [79].
Metoda ta została zaproponowana do rozwiązania podobnego zagadnienia w [91]. Za wektor
startowy dla metody Nelder’a – Mead’a został przyjęty wektor odpowiadający z
przekształcenie identycznościowe:
d 0 = [1,1,0,0,0]
4.2 Metody z „rzadką siatką”
Transformacja afiniczna pozwala jedynie na odwzorowanie globalnych róŜnic
pomiędzy zobrazowaniami (róŜnica wielkości, skalowanie, obrót). JeŜeli chcemy usunąć
róŜnice lokalne, wówczas model afiniczny stanie się niewystarczający. Zobrazowania mózgu
mogą znacząco róŜnić się lokalnie, zarówno jeŜeli weźmiemy pod uwagę grupę pacjentów o
tym samym wieku, jak równieŜ zmieniać się wraz z upływem lat. Te czynniki powodują, Ŝe
bardzo trudne lub wręcz niemoŜliwe staje się dokładne odwzorowanie obrazu ruchomego na
statyczny, jedynie przy pomocy modelu afinicznego. W takich przypadkach z pomocą
przychodzą modele deformacji oparte na gęstej i rzadkiej siatce. W tym rozdziale zostanie
omówiony model swobodnej deformacji siatki (free form deformation – FFD) oparty na
funkcjach sklejanych (B – splinach). Algorytm ten został z powodzeniem uŜyty między
innymi do dopasowania zobrazowań mammograficznych piersi [88], TK wątroby [42] oraz w
celu śledzenia i analizy pracy serca [8].
Zasada działania FFD opiera się na sterowaniu deformacją obiektu przy pomocy
zestawu punktów kontrolnych. Deformację, którą otrzymujemy w efekcie tego działania
pozwala na uzyskanie ciągłej transformacji dla obiektów w rozwaŜanej przestrzeni
(najczęściej R 2 lub R 3 ).
Jedną z moŜliwości stworzenia takiej transformacji jest zastosowanie funkcji
sklejanych (splinów) tak jak B – spliny, poniewaŜ mogą one być kontrolowane lokalnie i
mogą być obliczone w stosunkowo szybki sposób [42].
Algorytm FFD oparty na B – splinach jest popularnym i często uŜywanym [2]
modelem dopasowania lokalnego. Dla kaŜdego punktu zobrazowania o współrzędnych ( x, y )
transformacja punktu zostaje obliczone przy pomocy 4 najbliŜszych węzłów siatki dla jedno
wymiarowej transformacji, 16 węzłów siatki dla dwuwymiarowej transformacji, 64 węzłów
dla trójwymiarowej itd.
68
Dla przypadku dwuwymiarowego wyraŜa się to przy pomocy wzoru:
3
3
T ( x, y ) = ( x ' , y ' ) = ∑∑ β l (u ) ⋅ β m (v ) ⋅ φi +l , j + m (4.10)
l =0 m =0
Gdzie:
( x ' , y ' ) - współrzędne punktu, który po transformacji uzyska współrzędne (x,y),
i, j – są indeksami punktów kontrolnych (sterujących deformacją):
y
x
i = − 1 , j = − 1 (4.11)
δ y
δ x
δ x , δ y - odległości pomiędzy punktami kontrolnymi
u, v – względna pozycja punkty (x, y) wewnątrz „oczka” dwuwymiarowej siatki
wyznaczonego przez kontrolne punkty
u=
x
y y
− , v =
− (4.12)
δ x δ x
δ y δ y
x
Funkcje od β 0 do β 3 są wielomianami trzeciego stopnia:
β 0 (t ) =
(− t
β1 (t ) =
β 2 (t ) =
3
+ 3 ⋅ t 2 − 3 ⋅ t + 1)
(4.13)
6
(3 ⋅ t
(− 3 ⋅ t
3
3
− 6 ⋅ t 2 + 4)
(4.14)
6
+ 3 ⋅ t 2 + 3 ⋅ t + 1)
(4.15)
6
β 3 (t ) =
t3
(4.16)
6
Dopasowanie obrazów przy pomocy powyŜszego modelu polega na odpowiednim
manipulowaniu pozycją węzłów interpolacyjnych tak, aby uzyskana transformacja
minimalizowała „róŜnicę” (funkcję błędu) pomiędzy ruchomym a statycznym obrazem.
Optymalne połoŜenie węzłów siatki moŜe być znalezione na przykład przez zastosowanie
gradientowej metody największego spadku (gradient descent metod).
W przypadku dyskretnym, jakim jest dopasowanie obrazów, wynikowe współrzędne
( x ' , y ' ) muszą zostać zmienione na wartości całkowite. Wymaga to obliczenia wartości
odcienia szarości zobrazowania, które będzie występowało w punkcie ( x, y ) . W algorytmie
stosowanym przez autora tej dysertacji wartość odcienia szarości piksela (x,y) zaleŜy od
wartości czterech sąsiadujących z punktem ( x ' , y ' ) pikseli i obliczana jest jako średnia
waŜona tych wartości zgodnie ze wzorem (4.17) i (4.18) z poniŜszego algorytmu:
69
Algorytm znajduje część ułamkową współrzędnych piksela:
( x local , ylocal ) := T ( x, y ) − T ( x, y ) (4.17)
Oblicza wartości odcieni szarości pikseli sąsiadujących z T ( x, y ) :
C0 = I (T ( x, y ))
C1 = I (T (x, y + 1))
C 2 = I (T ( x + 1, y ))
C3 = I (T ( x + 1, y + 1))
I ( x , y ) jest wartością odcienia szarości zobrazowania I w punkcie (x,y).
Następnie obliczane są współczynniki wagowe Pi , które skalują udział poszczególnych
odcieni szarości Ci :
P0 = (1 − xlocal ) ⋅ (1 − y local )
P1 = (1 − xlocal ) ⋅ ylocal
P2 = xlocal ⋅ (1 − y local )
P3 = xlocal ⋅ y local
Wartość współczynnika zaleŜy od odpowiedniego iloczynu części ułamkowej współrzędnych
piksela T ( x, y ) , jeŜeli współrzędne T ( x, y ) będą liczbami całkowitymi, jedyną wagą
niezerową (i równocześnie równą 1) będzie waga P0 skalująca wartość C0 .
Ostatecznie:
3
I out ( x, y ) = ∑ C i ⋅ Pi (4.18)
i =0
Wartość błędu pomiędzy ruchomym a statycznym obrazem moŜna zdefiniować jako
(4.9).
Błąd
moŜe
być
równieŜ
policzony
dla
kaŜdego
fragmentu
obrazu
([k , k + o], [l , l + p ]) ⊃ ([1, N ], [1, M ]) :
∑∑ (A
k +o l + p
ij
r ( Ak :k +o;l:l + p , Bk :k +o;l:l + p ) = 1 −
i = k j =l
(
k +o l + p
∑∑ Aij − A
k : k + o ; l :l + p
i = k j =l
70
)(
− Ak :k + o ;l:l + p ⋅ Bij − B k :k + o ;l :l + p
)
(
)
k +o l + p
2
⋅ ∑∑ Bij − B
k :k + o ; l :l + p
i = k j =l
)
2
(4.19)
Do algorytmu FFD często wprowadza się modyfikacje w celu poprawienia jakości
dopasowania oraz przyspieszenia procesu. Jedną z nich jest zagęszczanie siatki węzłów
interpolacyjnych w miarę postępu procesu dopasowania. Po zadanej liczbie kroków
algorytmu dopasowującego liczbę punktów kontrolnych zostaje zwiększona poprzez dodanie
kolejnego punktu kontrolnego pomiędzy kaŜdymi dwoma istniejącymi punktami (rysunek
4.1).
Rysunek 4.1 Proces zagęszczania siatki węzłów interpolacyjnych w trakcie procesu dopasowania obrazów. (A) –
stan początkowy siatki o rozmiarze 6 x 6. Nowy punkt siatki zostaje umieszczony pomiędzy dwoma starymi.
Proces dopasowania modyfikuje połoŜenie węzłów interpolacyjnych (stan po 12 iteracjach algorytmu) (B)
następuje zagęszczenie węzłów siatki, algorytm kontynuuje przemieszczenie węzłów (stan po kolejnych 12
iteracjach) - siatka 11 x 11 (C) kolejne 12 iteracji algorytmu, siatka 21 x 21 (D).
Drugą metodą, która została uŜyta w algorytmie FFD jest przeskalowanie
dopasowywanych obrazów w miarę zagęszczania węzłów siatki. Przeskalowany obraz jest
następnie wygładzany filtrem gaussowskim. Operacja ta pozwalają na znaczne przyspieszenie
procesu dopasowania w wypadku wielokrotnego przeprowadzania procesu optymalizacji przy
róŜnym stopniu zagęszczenia siatki punktów kontrolnych.
Rysunek 4.2 (a) Zobrazowanie aksjalne mózgu z siatką punktów kontrolnych o wymiarze 6 x 6. Odległość
pomiędzy najbliŜszymi punktami φ w kolumnach wierszach wynosi δ. (b) W procesie optymalizacji połoŜenia
węzłów interpolacyjnych dla kaŜdego z punktów φ i, j błąd obliczany jest w wewnątrz obszaru otaczającego
dany punkt. Rozmiar obszaru to
4 ⋅ δ × 4 ⋅ δ . Źródło rysunku [31].
71
Kompletny schemat algorytmu dopasowania podany jest poniŜej:
1. Ustalenie początkowe rozmiaru siatki – liczby węzłów oraz kolumn (nRows,
nColumns), na przykład:
nRows := 8 ; nColumns := 8
Niech I oznacza obraz ruchomy, Iref obraz statyczny.
Rozmiar zobrazowań wynosi N x M.
2. Inicjacja węzłów siatki o rozmiarze nRows x nColumns, sąsiednie węzły leŜa od siebie
w równej odległości δ.
3. Ustalenie liczby iteracji procesu dopasowania ( recalculation ) oraz liczby zagęszczeń
siatki kontrolnych węzłów ( refine ), na przykład:
refine := 2
recalculation := 6
4. For r: = 1 to refine + 1
4.1 Obliczenie
współczynnika
resize _ factor :=
przeskalowania
obrazów
(resize_factor):
r
refine + 1
4.2 Przeskalowanie zobrazowań algorytmem NNI, obraz wynikowy został
wygładzony filtrem gaussowskim.
4.3 Obliczenie wartości kroku dla algorytmu optymalizacji gradientowej:
M −1
N −1
+
nRows − 1 nColumns − 1
µ = 0 .2 ⋅
4.4 For z := 1 to recalculation
4.4.1 Obliczenie gradientu funkcji błędu (4.19)
∂r (I , I ref , Φ1 ) ∂r (I , I ref , Φ 2 ) ∂r (I , I ref , Φ n )
,
,...,
∇r =
∂Φ1
∂Φ 2
∂Φ n
(gradient
został
obliczony
przy
pomocy
ilorazu
róŜnicowego
centralnego), dla kaŜdego punktu kontrolnego bierzemy pod uwagę
tylko jego otoczenie o rozmiarze 4 ⋅ δ × 4 ⋅ δ (rysunek 4.2).
4.4.2 Obliczenie nowych pozycji węzłów siatki:
72
Φ := Φ + µ ⋅
∇r
∇r
µ := µ ⋅ 0.85
4.5 Zagęszczenie siatki węzłów interpolacyjnych:
nRows := 2 ⋅ nRows + 1
nColumns := 2 ⋅ nColumns + 1
Nowa siatka będzie miała rozmiar nRows x nColumns. KaŜdy z nowych
węzłów pojawia się pomiędzy dwoma starymi węzłami a jego pozycja zostaje
określona przy pomocy interpolacji kubiczną funkcją sklejaną [80] (rysunek
4.1).
5. Po znalezieniu ostatecznej pozycji węzłów siatki naleŜy dokonać deformacji
ruchomego obrazu
I := splineTran sform ( I , Φ )
4.3 Metody z „gęstą siatką”
Przykładem algorytmu naleŜącego do tej grupy jest algorytm Thiriona [98]. W swojej
pracy Thirion proponuje model wzorowany na procesie dyfuzji. Algorytm ten moŜe być
równieŜ traktowany jako numeryczne rozwiązanie problemu przepływu optycznego (optical
flow).
W swoim rozwiązaniu Thirion traktuje granice obiektów występujących na jednym z
zobrazowań jako półprzepuszczalną membranę przez którą dyfundują cząsteczki (piksele)
zobrazowania na skutek działania efektorów znajdujących się na membranie (rysunek 4.3).
Efektory membrany pełnią podobną funkcję jak „demony” w przedstawionym przez
Maxwella paradoksie [98] stąd algorytm Thiriona nazywany jest czasem w literaturze
określeniem demons - like algorithm.
Membrana z “demonami”
(A)
(B)
Rysunek 4.3 Dwa pojemniki wypełnione cząsteczkami gazu oddzielone membraną z „demonami”. (A) Stan
początkowy, (B) na skutek działania efektorów na membranie, po pewnym czasie kaŜdy z pojemników będzie
zawierał cząsteczki gazu tego samego rodzaju. Opracowano na podstawie [98].
73
ZałóŜmy, Ŝe chcemy dopasować zobrazowanie M na zobrazowanie S. Niech kontur obiektu O
na zobrazowaniu S będzie membraną (rysunek 4.4) a „demony” rozmieszczone są na
powierzchni O. Przyjmijmy, Ŝe moŜemy wyliczyć lokalnie, dla kaŜdego punktu kontury w S
wektor, który jest prostopadły do konturu i skierowany od środka na zewnątrz obiektu
(moŜemy w tym celu uŜyć np. gradientu zobrazowania S). Przyjmijmy równieŜ, Ŝe M jest
siatką, której węzły („cząsteczki gazu”) mogą zostać zaklasyfikowane jako wewnętrzne lub
zewnętrzne dla danego obiektu O. M nazywane jest modelem dyfuzyjnym jeŜeli „demony”
spełniają poniŜszą (nieformalną) definicję:
Demon jest efektorem umieszczonym w punkcie P na brzegu obiektu O. MoŜnie oddziaływać
lokalnie „popychając” węzeł siatki M wewnątrz obiektu M jeŜeli zostanie sklasyfikowany jako
„cząstka wewnętrzna” lub na zewnątrz jeśli cząstka zostanie sklasyfikowana jako „zewnętrzna”
(rysunek 4.4).
Rysunek 4.4 Ruchomy obraz „dyfunduje” poprzez kontury obiektu obrazu statycznego na skutek działania
efektorów („demonów”) umieszczonych na brzegu obiektu z obrazu statycznego. Opracowano na podstawie
[98].
Przyjrzyjmy się teraz relacji zachodzącej pomiędzy zaprezentowanym powyŜej modelem
„demonów Maxwella” a modelem przepływu optycznego [104].
Definicja 4.1:
Niech M i S będą zobrazowaniami, I ( x, t ) wybranym woskelem zobrazowania z sekwencji
czasowej obrazów, x = ( x1 , x 2 ,..., x n ) . ZałóŜmy, Ŝe istnieje przekształcenie f : I → I , takie Ŝe
74
f ( M ) = S . JeŜeli dodatkowo zachodzi warunek, Ŝe jasność pikseli zobrazowań M jest stała w
czasie:
dI ( x, t )
= 0 (4.20)
dt
to przekształcenie to jest przepływem optycznym.
WyraŜenie (4.20) nie gwarantuje otrzymania jednoznacznego rozwiązania dla kaŜdego
woksela [104]. Według [41] (4.20) moŜna zapisać jako:
∂I ( x , t )
∂t
f ( x) = −
∇ X I ( x , t ) (4.21)
2
∇ X I ( x, t )
gdzie (4.21) jest członem odpowiadającym za przesunięcie w kierunku gradientu jasności
woksela. Równanie (4.21) moŜe zostać rozwiązane numerycznie przy pomocy algorytmu
zaproponowanego przez Thiriona z uŜyciem siatki, której węzły i „demony” znajdują się w
kaŜdym z wokseli obrazu [105]. Deformacja, która przekształca woksela ze zobrazowania S
na woksel na zobrazowaniu M moŜe zostać obliczona przy pomocy następującego schematu
iteracyjnego:
∂I ( x , t )
∂t
∇ X I ( x, t ) (4.22)
ν n +1 ( x ) = Gσ ⊗ ν n −
2
2
∂I ( x , t )
∇ X I ( x, t ) +
∂t
Gdzie Gσ ⊗ oznacz oznacza splot z wygładzającym filtrem gaussowskim.
W implementacji powyŜszego schematu siły liczone są niezaleŜnie dla wszystkich wokseli
obrazu przez co pomijane są ewentualne relacje pomiędzy sąsiednimi pikselami.
Zastosowanie splotu ma na celu eliminację/zmniejszenie wpływu działania wektorów
niewłaściwie skierowanych sił na ostateczny wynik.
2
∂I ( x, t )
Składnik
w mianowniku (4.22) został dodany w celu zapewnienia stabilności
∂t
2
obliczeń numerycznych gdy ∇ X I ( x, t ) jest bliskie zeru.
Formuła rozwiązania schematu (4.22) zaproponowana przez Thiriona w [98] przyjmuje postać:
f =
(M − S )∇S
∇S
2
+ (M − S ) 2
75
(4.23)
W podstawowym sformułowaniu gradient liczony jest jedynie ze statycznego zobrazowania.
S. He Wang i inni [104] wprowadzili modyfikacje do podstawowego algorytmu w celu
zwiększenia efektywności dopasowania (nowy algorytm został nazwany Active demons
registration algorithm). Autorzy w nowym algorytmie uwzględnili dwukierunkowość procesu
dyfuzji. „Nowe demony” wytwarzają siłę, która powoduje dyfuzję obiektu ruchomego do
obiektu statycznego (tak jak w podstawowej wersji algorytmu) oraz siłę, która powoduję
dyfuzję obszarów obiektu statycznego do odpowiednich obszarów obiektu ruchomego:
∇M
∇S
(4.24)
+
f = ( M − S )
∇S 2 + ( M − S ) 2 ∇M 2 + ( S − M ) 2
Gdzie “pasywny” składnik to (identycznie z (4.23)):
fS =
(M − S )∇S
2
∇S + ( M − S ) 2
(4.25)
A nowa “aktywna” siła oparta jest na gradiencie obrazu ruchomego M:
fM =
− (S − M )∇S
∇M
2
+ (S − M )2
(4.26)
Po uwzględnieniu (4.22) i (4.26) otrzymujemy iteracyjny schemat metody aktywnych
demonów:
∇S
+
ν n +1 ( x ) = Gσ ⊗ ν n − ( M − S )
2
∇S + ( M − S ) 2 ∇M
+ ( S − M ) 2
∇M
2
(4.27)
W wyniku działania algorytmu iteracyjnie otrzymujemy coraz dokładniejsze przybliŜenie pola
wektorowego V , takiego, Ŝe M + V = S .
4.3.1 Szybka aproksymacja filtru gaussowskiego dla algorytmu
Thiriona
Dla duŜych rozmiarów okna filtru gaussowskiego obliczenie splotu w równaniu (4.27)
staje się operacją wymagającą stosunkowo największego czasu spośród wszystkich kroków
algorytmu Thiriona. W celu przyspieszenia procesu dopasowania autor dysertacji zastosował
76
szybką (przybliŜoną) metodę zaproponowaną w [112] przy pomocy odpowiednio
skonstruowanego filtru cyfrowego [114].
Funkcja Gaussa dana jest wzorem:
−t2
g (t ,σ ) =
1
2
e 2 ⋅σ (4.28)
2π σ
gdzie σ jest wariancją.
Transformata Fouriera funkcji Gaussa wynosi:
−t
1
2
F ( g (t ,σ )) = F
e 2⋅σ
2π σ
2
−t
= 1 ⋅ F e 2⋅σ 2
2π σ
2
(4.29)
PoniewaŜ:
( )=
Fe
− ax 2
π
a
⋅e
−
(π ⋅ξ )2
a
(4.30)
Dla funkcji Gaussa a = 2σ 2
Stąd:
−t 2
1
⋅ F e 2⋅σ
2π σ
2
= 1 ⋅ π 2 ⋅ σ 2 ⋅ e −2⋅(π ⋅ξ ⋅σ )2 = e −2⋅(π ⋅ξ ⋅σ )2 (4.31)
2π σ
Podstawiając:
ω = 2πξ (pulsacja)
Otrzymujemy ostatecznie:
F ( g (t , σ )) = G (ω , σ ) = e
−ω 2σ 2
2
(4.32)
Funkcja g (t ) moŜe zostać aproksymowana [112]:
1
g (t ) =
e
2π
−t 2
2
=
1
+ ε (t ) (4.33)
a 0 + a 2 t + a 4 t 4 + a6 t 6
2
Gdzie:
a0 = 2.490895 , a 2 = 1.466003 , a 4 = −0.024393 , a 6 = 0.178257
77
Błąd ε (t ) ograniczony jest przez wartość ε (t ) < 2.7 ⋅10 −3 . Błąd względem maksymalnej
wartości, którą funkcja g(t) przyjmuje dla t=0, to:
ε (t )
g (0)
< 0.68%
UŜywając aproksymacji (3.3) do równania (3.2) otrzymujemy:
Gq (ω ) =
A0
(4.34)
a 0 + a 2 ( qω ) + a 4 ( qω ) 4 + a 6 ( qω ) 6
2
Wartość σ została zastąpiona przez q w celu skorygowania błędów numerycznych w
dziedzinie czasu, który pojawiają się na skutek zastosowania aproksymacji w dziedzinie
częstotliwości oraz na skutek zastosowania aproksymacji równania róŜniczkowego przez
przednie i wsteczne równanie róŜnicowe. Sposób obliczenia q zostanie podana w dalszej
części wyprowadzenia.
Podstawiając s = jω otrzymujemy transformatę Laplace’a:
Gq ( s ) =
A0
(4.35)
a0 − ( a 2 q ) s + ( a 4 q 4 ) s 4 − (a 6 q 6 ) s 6
2
2
Równanie (4.35) moŜe zostać rozpisane w następujący sposób:
G q (ω ) = G L ( s )G R ( s ) (4.36)
GL ( s) =
a1
(4.37)
(1.1668 + qs )( 3.20373 + 2.21567 qs + q 2 s 2 )
GR ( s) =
a1
(4.38)
(1.1668 − qs )( 3.20373 − 2.21567 qs + q 2 s 2 )
gdzie w równaniu (4.37) bieguny występują w lewej półpłaszczyźnie a w (4.38) w prawej
półpłaszczyźnie.
78
Bieguny G L (s )
GR (s )
s0
− 1.1668
q
1.1668
q
s1
( −1.10783 + 1.40586 j)
q
(1.10783 + 1.40586 j)
q
s2
( −1.10783 − 1.40586 j)
q
(1.10783 − 1.40586 j)
q
W celu stworzenia filtru dyskretnego dla (4.37) autorzy w [112] uŜyli technikę opartą na
ilorazie róŜnicowym wstecznym [77] podstawiając:
dy y[n ] − y[ n − 1]
≈
dt
T
Stąd:
1 − z −1
T
s=
Dla T=1 otrzymujemy:
GL ( s) =
a1
(4.39)
(1.1668 + q(1 − z ))( 3.20373 + 2.21567 q(1 − z −1 ) + q 2 (1 − z −1 ) 2 )
−1
Dla GR (s) uŜyto ilorazu róŜnicowego przedniego:
dy y[n + 1] − y[ n ]
≈
dt
T
Stąd:
s=
z −1
T
Dla T=1 otrzymujemy:
GR ( s) =
a1
(4.40)
(1.1668 − q( z − 1))( 3.20373 − 2.21567 q( z − 1) + q 2 ( z − 1) 2 )
Po wymnoŜeniu i uporządkowaniu potęg wielomianów w mianowniku:
H L ( z) =
A2
(4.41)
b0 − b1 z − b2 z − 2 − b3 z −3
H R ( z) =
−1
A2
(4.42)
b0 − b1 z − b2 z 2 − b3 z 3
1
79
Gdzie:
b0 = 1.57825 + ( 2.44413q ) + (1.4281q 2 ) + (0.4222205 q 3 )
b1 = ( 2.44413q ) + ( 2.85619 q 2 ) + (1.26661q 3 )
(
b2 = − (1.4281q 2 ) + (1.26661q 3 )
)
b3 = 0.422205 q 3
Wartość q (określona przy pomocy analizy regresji):
0.98711 ⋅ σ − 0.96330, σ ≥ 2.5
q=
3.97156 − 4.14554 ⋅ 1 − 0.26891 ⋅ σ , 0.5 ≤ σ ≤ 2.5
Proces filtracji przebiega dwuetapowo:
-
Wejściowy sygnał filtrowany jest „wprzód” zgodnie z równaniem (4.41);
-
Sygnał uzyskany jako wynik działania filtra (4.41) filtrowany jest „wstecz” zgodnie z
równaniem róŜnicowym (4.42).
w2 ( n) = B ⋅ w1 ( w) +
(b1 w1 ( n − 1) + b2 w1 ( n − 2) + b3 w1 ( n − 3))
(4.41)
b0
w3 ( n) = B ⋅ w2 ( w) +
(b1 w2 ( n + 1) + b2 w2 ( n + 2) + b3 w2 ( n + 3)
(4.42)
b0
Gdzie:
w1 (n) - sygnał wejściowy
w2 (n) - sygnał wyjściowy filtra (4.41), sygnał wejściowy dla filtra (4.42)
w3 ( n) - sygnał wyjściowy filtra (4.42)
B = 1−
b1 + b2 + b3
(4.43)
b0
Filtracja n - wymiarowym filtrem Gaussa moŜe zostać zastąpiona poprzez n – krotną filtrację
jednowymiarowym filtrem Gaussa wzdłuŜ głównych osi [112], [100] (w dwuwymiarowym
przypadku dyskretnym, splot będzie dokonywany najpierw dla wszystkich kolumn przy
ustalonych indeksach wierszy a następnie dla wszystkich wierszy przy ustalonych indeksach
kolumn).
Zastosowanie w dysertacji filtracji sygnału zgodnie z równaniami (4.41) i (4.42)
przyspieszyło kilkukrotnie proces dopasowania algorytmem Thiriona w porównaniu z
implementacją stosującą standardowy algorytm filtracji dostępną w pakiecie Matlab (funkcja
imfilter).
80
4.4 Inne metody
Poza metodami dopasowania zeprezentowanymi w poprzednich rozdziałach, naleŜy
zaznaczyć, Ŝe istnieje jeszcze wiele innych modeli, które nie zostały zaimplementowane i
przetestowane przez autora dysertacji. Często wykorzystywane są modele oparte na fizycznych
właściwościach materiałów, które przedstawione są na zobrazowaniach. Jednym z nich jest model
oparty na deformacji ciała elastycznego. Celem dopasowania jest znalezienie pola wektorowego
opisującego deformację, pod wpływem której obraz ruchomy (traktowany jako ciało elastyczne)
zostanie dopasowany do obrazu statycznego. Algorytm dopasowania poprzez deformację ciała
elastycznego wymieniany jest w dysertacji [69]. Bardziej szczegółowy opis problemu oraz jego
rozwiązania moŜna znaleźć w [68]. PowyŜsza metoda została wykorzystana między innymi w [40] do
dopasowania zobrazowań tomografii rezonansu magnetycznego kobiet z podejrzeniem raka piersi.
Innym modelem opartym na fizycznych właściwościach materiału jest model oparty na przepływie
lepkiej cieczy. Równanie Naviera – Stokesa opisujące pole wektorowe przepływu lepkiej cieczy moŜe
zostać rozwiązane metodą elementów skończonych [68], [69]. Inna (wymagająca mniejszego nakładu
obliczeń) metoda została zaprezentowana w [84], gdzie autorzy wykorzystują algorytm dopasowania
dla RM róŜnych sekwencji (T1 i T2). Szczegóły metody uŜytej w [84] moŜna znaleźć w [27], [10]. W
[97] autorzy uŜyli modelu przepływu lepkiej cieczy w celu dopasowania trójwymiarowych
zobrazowań RM mózgu, w [11] do dopasowania trójwymiarowych zobrazowań szczęki.
81
5. Budowa deformowalnego atlasu mózgu
Deformowalny atlas mózgu (brain deformable atlas) pozwala na identyfikację tkanek
mózgowia na zobrazowaniach medycznych róŜnych modalności (np. TK, RM). W
przeciwieństwie do zwykłego atlasu mózgu, opis widocznych struktur generowany jest
indywidualnie dla kaŜdego przypadku. Deformowalny atlas zbudowany jest ze zbioru
referencyjnych przekrojów mózgu (w zaleŜności od tego, czy jest to atlas dedykowany np. dla
TK czy RM są to odpowiednio przekroje TK lub RM), zbioru etykiet opisujących widoczne
na kaŜdym przekroju tkanki oraz algorytmu dopasowania obrazów. Algorytm dopasowuje
wzorcowe obrazy mózgu (obrazy ruchome) do obrazów mózgu diagnozowanego pacjenta
(obrazy statyczne). Po otrzymaniu w wyniku dopasowania parametrów transformacji,
przekształcenie z tymi samymi parametrami uŜywane jest do przekształcenia zbioru etykiet.
Dzięki temu przekształcone etykiety będą opisywały tkanki mózgowe diagnozowanego
pacjenta (rysunek 5.1).
Rysunek 5.1 Proces dopasowania zobrazowania TK przy pomocy deformowalnego atlasu mózgu. Opis w
tekście.
Atlas mózgu TK moŜe zostać uŜyty do opisu map dynamicznej perfuzji TK. PoniewaŜ
mapy perfuzyjne generowane są ze zbioru zobrazowań TK, jedno z tych zobrazowań (np.
takie, na którym nie widać jeszcze zwiększenia intensywności naczyń krwionośnych przez
materiał kontrastowy) moŜe zostać uŜyte jako obraz statyczny. Dzięki temu podejściu
82
problem opisu anatomicznych struktur na mapie perfuzji TK sprowadzony zostanie do
zastosowania dwuwymiarowego anatomicznego atlasu TK.
Wiele algorytmów dopasowania zostało stworzonych i przetestowanych dla
zobrazowań tomografii rezonansu magnetycznego, wymagają one jednak wcześniejszej
segmentacji obrazu ([78], [28]). W wypadku dynamicznej perfuzji TK mamy dostęp jedynie
do zobrazowań
TK, dla których rzadko budowane są deformowalne atlasy. Co więcej,
poniewaŜ badanie perfuzyjne TK jest badaniem dwuwymiarowym, nie moŜliwe jest
stworzenie dla kaŜdego z moŜliwych przekrojów aksjalnych modelu, na którym będzie moŜna
wyznaczyć odpowiednią liczbę charakterystycznych punktów jednoznacznie wyznaczających
parametry transformacji obrazu. PowyŜsze warunki determinują uŜycie algorytmów
dopasowania opartych na badaniu odcieni szarości pikseli.
5.1 Atlas Talairach
Jednym z najbardziej znanych anatomicznych atlasów mózgu jest wydany w 1998
roku atlas Talarach [96]. Atlas ten zawiera serię wysokiej jakości kolorowych rysunków
(wykonanych w płaszczyznach czołowej, strzałkowej i poprzecznej- aksjalnych, koronalnych
i sagitalnych) sporządzonych na podstawie zobrazowań RM 60 – letniej praworęcznej kobiety
pochodzącej z Europy.
PoniewaŜ atlas Talairach został szczegółowo sporządzony tylko dla prawej półkuli mózgowej,
kompletny opis mózgu moŜna otrzymać poprzez symetryczne odbicie zobrazowań względem
osi y wszystkich aksjalnych zobrazowań [58], [59] - rysunek 5.2.
83
Rysunek 5.2 Przykładowy przekrój poprzeczny mózgowia w komputerowej wersji atlasy Talairach, prawa część
rysunku powstała poprzez symetryczne odbicie lewej względem osi y (źródło - [58]).
Pomimo, Ŝe autorzy [96] sporządzili atlas na podstawie analizy tylko jednego
mózgowia, atlas ten stał się bardzo popularny i wielokrotnie wykorzystywany w aplikacjach
medycznych [58], [59], [117], [72].
5.2 Tworzenie wzorcowych przekrojów CT oraz ich opisów
Pierwszym krokiem do stworzenia deformowalnego anatomicznego atlasu mózgu TK
jest utworzenie wzorcowych przekrojów poprzecznych mózgu oraz zestawu ich opisów.
PoniewaŜ autorowi tej pracy nie udało się znaleźć gotowych zbiorów spełniających stawiane
im wymagania, sporządził je samodzielnie [31]. Atlas sporządzony na potrzeby badań zawiera
11 aksjalnych przekrojów CT oraz 11 odpowiadających im obrazów z opisami widocznych
struktur mózgowia (etykiety) – rysunek 5.3. Etykiety zostały sporządzone na podstawie
odpowiednich przekrojów atlasu Talairach. Na obrazach z etykietami wyszczególniono 11
struktur mózgowia, ich pozycje zaznaczone są jako róŜne odcienie szarości.
84
Rysunek 5.3 Zobrazowania wchodzące w skład deforomowalnego atlasu mózgu sporządzonego przez autora:
dwa dolne rzędy zawierają 11 aksjalnych przekrojów CT, dwa górne 11 odpowiadające im obrazy z opisami
widocznych struktur mózgowia (etykiety). Nazwy struktur mózgowych opisanych przy pomocy etykiet znajduję
się w tabeli 5.1.
Nazwy struktur mózgowych jak i wartości etykiet zawarte są w tabeli 5.1. Są to
wszystkie struktury znajdujące się w warstwie płatów mózgowych (lobe level) w cyfrowym
atlasie mózgu prezentowanym w [58]. Uzyskanie większej szczegółowości atlasu na potrzeby
opisu map perfuzyjnych nie było koniczne.
Tabela 5.1 Nazwy struktur mózgowych oraz wartości etykiet obrazów etykiet z rysunku 5.3.
Numer
Nazwa ang.
struktury
Nazwa pl.
Wartość
piksela
1
Anterior Lobe
Płat przedni
50
2
Frontal Lobe
Płat czołowy
20
3
Frontal - Temporal Space
Okolica czołowo - skroniowa
90
4
Limbic Lob
Płat brzeŜny (limbiczny)
80
5
Midbrain
Śródmózgowie
70
6
Occipital Lobe
Płat potyliczny
110
7
Parietal Lobe
Płat ciemieniowy
120
8
Pons
Most, struktura pnia mózgu
30
9
Posterior Lobe
Płat tylny
60
85
10
Sub - lobar
Przestrzeń pomiędzy płatami
100
11
Temporal Lobe
Płat skroniowy
40
5.3 Dobór optymalnego algorytmu dopasowania obrazu
Ocena algorytmu dopasowania będzie dokonywana przy pomocy następującej miary:
CC ( A, B ) error =
(1 − CC BR ( A, B) ) − (1 − CC AR ( A, B) )
(1 − CC BR ( A, B) )
Gdzie:
CC ( A, B ) error - miara oceny zwiększenie bądź zmniejszenie względnego błędu korelacji
obrazów A i B.
CC BR ( A, B ) - współczynnik korelacji obrazów A i B przed dokonaniem dopasowania.
CC AR ( A, B ) - współczynnik korelacji obrazów A i B po dokonaniu dopasowania.
WyraŜa on o ile względnie zmienił się błąd oparty na współczynniku korelacji (4.9) po
dokonaniu procesu dopasowania obrazu. Im większa jest wartość współczynnika korelacji
CC AR ( A, B ) (czyli im mniejszy jest błąd po dokonaniu dopasowania) tym większą wartość
przyjmuje CC ( A, B ) error .
JeŜeli CC ( A, B ) error > 0 , oznacza to, Ŝe CC BR ( A, B ) < CC AR ( A, B ) , czyli obrazy stały się do
siebie „podobniejsze”, po dokonaniu dopasowania. JeŜeli CC ( A, B ) error < 0 , oznacza to, Ŝe
CC BR ( A, B ) > CC AR ( A, B ) , czyli dopasowanie spowodowało zmniejszenie „podobieństwa”
pomiędzy
zobrazowaniami.
CC BR ( A, B ) = CC AR ( A, B ) ,
czyli
JeŜeli
proces
CC ( A, B ) error = 0 ,
oznacza
dopasowania
spowodował
nie
to,
Ŝe
zmiany
„podobieństwa” zobrazowań.
Aby wyłonić algorytm, dla którego wartość
CC ( A, B ) error
jest największa,
przeprowadzono w sumie 28 prób na trzech róŜnych algorytmach dopasowania (omówionych
dokładnie w rozdziale IV tej rozprawy):
-
Algorytmie opartym na transformacji afinicznej
-
Algorytmie Thiriona
-
Algorytmie FFD
86
Algorytm Thiriona opiera się na załoŜeniu, Ŝe na zobrazowaniu ruchomym i
statycznym występuje taka sama liczba pikseli o danej jasności (4.20). W wypadku
zobrazowań pochodzących od dwóch róŜnych pacjentów, w tym jedno z „klasycznego”
badania TK a drugiego z dpTK załoŜenie to zazwyczaj nie jest spełnione. Aby algorytm
Thiriona mógł zostać zastosowany konieczne jest przejście do tej samej przestrzeni kolorów
(np. poprzez modyfikację histogramu odcieni szarości lub dokonanie wstępnej segmentacji
obrazów [17], [67]). Obrazy TK z dpTK mają bardzo wysoki poziom zakłóceń, co
praktycznie uniemoŜliwia zastosowanie popularnych algorytmów segmentacji [17]. Aby
rozwiązać ten problem autor tej rozprawy uŜył podejścia zaproponowanego w [66], które
polega na dopasowaniu zbinaryzowanego zobrazowania TK (wartość binarną „1” mają
piksele zawierające tkanki mózgowia, „0” wszystkie pozostałe). Dzięki takiemu podejściu
moŜliwe jest bardzo dokładne dopasowanie obszaru brzegu mózgu, nie jest jednak brana pod
uwagę wewnętrzna struktura mózgowia. To podejście zostało przetestowane dla problemu
dopasowania zobrazowań TK mózgu w pracy [37].
Dla algorytmu Thiriona wykonano 2000 iteracji algorytmu a dla FFD 12 (dla kaŜdej
gęstości siatki), poniewaŜ dłuŜsze obliczenia nie prowadziły do znaczącej poprawy
otrzymywanego rozwiązania.
W celu poprawienia jakości dopasowania przetestowano algorytm FFD z dodatkowa
rotacją i skalowaniem. Algorytm ten jest „hybrydą” algorytmu dopasowania z zastosowaniem
transformacji afinicznej oraz lokalnej. Przed wykonaniem podstawowego algorytmu FFD,
obraz ruchomy jest obracany o kąt, którego tangens jest równy współczynnikowi nachylenia
osi symetrii wyznaczonej dla algorytmu wykrywania obszarów asymetrii dla zobrazowań
perfuzyjnych (patrz rozdział III).
Wektor translacji wyliczono w następujący sposób:
-
Wyznaczono
( ( xcenter
centralny
y
moving , center
xcenter =
moving
punkt
) , ( xcenter
static ,
zobrazowania
ycenter
static
ruchomego
i
statycznego
))
xr − xl
2
Gdzie:
xl - współrzędna pozioma najbardziej wysuniętego w lewo piksela zobrazowania
naleŜącego do mózgowia
xr - współrzędna pozioma najbardziej wysuniętego w prawo piksela zobrazowania
naleŜącego do mózgowia
87
ycenter =
yt − y b
2
Gdzie:
yt - współrzędna pionowa najbardziej wysuniętego w górę piksela zobrazowania
naleŜącego do mózgowia
yb - współrzędna pionowa najbardziej wysuniętego w dół piksela zobrazowania
naleŜącego do mózgowia
-
Wyznaczono wektor translacji
[
t = xcenter
static
− xcenter
moving
, ycenter
static
− y center
moving
]
PoniewaŜ algorytmy dopasowania zostały przetestowane dla róŜnych parametrów
startowych, w dalszej części pracy w celu rozróŜnienia poszczególnych konfiguracji
algorytmów będą stosowane skrótowe oznaczenia przedstawione w tabeli 5.2.
Tabela 5.2 Algorytmy oraz ich parametry startowe wykorzystywane w procedurach dopasowania obrazów
mózgowia.
Oznaczenie Algorytm dopasowania i jego parametry
A
Transformata affiniczna
B
Algorytm Thiriona, σ = 0.5 , 2000 iteracji
C
Algorytm Thiriona, σ = 1 , 2000 iteracji
D
Algorytm Thiriona, σ = 2 , 2000 iteracji
E
Algorytm Thiriona, σ = 5 , 2000 iteracji
F
Algorytm Thiriona, σ = 10 , 2000 iteracji
G
Algorytm Thiriona, σ = 15 , 2000 iteracji
H
FFD, siatka o rozmiarach 6x6, 12 iteracji
I
FFD, siatka o rozmiarach 8x8, 12 iteracji
J
FFD, siatka o rozmiarach 10x10, 12 iteracji
K
FFD, siatka o rozmiarach 16x16, 12 iteracji
L
FFD, siatka o rozmiarach 32x32, 12 iteracji
M
FFD, siatka o rozmiarach 6x6, 12 iteracji, dodatkowa rotacja i skalowanie
N
FFD, siatka o rozmiarach 8x8, 12 iteracji, dodatkowa rotacja i skalowanie
O
FFD, siatka o rozmiarach 10x10, 12 iteracji, dodatkowa rotacja i skalowanie
P
FFD, siatka o rozmiarach 16x16, 12 iteracji, dodatkowa rotacja i skalowanie
Q
FFD, siatka o rozmiarach 32x32, 12 iteracji, dodatkowa rotacja i skalowanie
88
R
FFD, siatka o rozmiarach 6x6, 12 iteracji, 1 zagęszczenie siatki
S
FFD, siatka o rozmiarach 8x8, 12 iteracji, 1 zagęszczenie siatki
T
FFD, siatka o rozmiarach 10x10, 12 iteracji, 1 zagęszczenie siatki
U
X
FFD, siatka o rozmiarach 6x6, 12 iteracji, 1 zagęszczenie siatki, dodatkowa rotacja i
skalowanie
FFD, siatka o rozmiarach 8x8, 12 iteracji, 1 zagęszczenie siatki, dodatkowa rotacja i
skalowanie
FFD, siatka o rozmiarach 10x10, 12 iteracji, 1 zagęszczenie siatki, dodatkowa rotacja i
skalowanie
FFD, siatka o rozmiarach 6x6, 12 iteracji, 2 zagęszczenia siatki
Y
FFD, siatka o rozmiarach 8x8, 12 iteracji, 2 zagęszczenia siatki
Z
FFD, siatka o rozmiarach 10x10, 12 iteracji, 2 zagęszczenia siatki
1
FFD, siatka o rozmiarach 6x6, 12 iteracji, 2 zagęszczenia siatki, dodatkowa rotacja i
skalowanie
FFD, siatka o rozmiarach 8x8, 12 iteracji, 2 zagęszczenia siatki, dodatkowa rotacja i
skalowanie
FFD, siatka o rozmiarach 10x10, 12 iteracji, 2 zagęszczenia siatki, dodatkowa rotacja i
skalowanie
V
W
2
3
Algorytmy z Tabeli 5.2 zostały przetestowane na wszystkich 93 zobrazowaniach TK
ze zbioru testowego. Wykonano w sumie 2697 pomiarów (93 dla kaŜdego z 29 testowanych
konfiguracji algorytmów).
Wszystkie obliczenia statystyczne zostały wykonane przy pomocy programu Statistica
for Windows 5.1. W pierwszej kolejności została sprawdzona hipoteza, czy rozkład
zmiennych w próbce jest rozkładem normalnym. Przez X oznaczmy kolejna wyniki prób
CC ( A, B ) error . Średnia wartość X wynosi:
X = 0.3926972 ,
natomiast wariancja:
D 2 ( X ) = 0.1482845
89
Rysunek 5.4 Rozkład zmiennej losowej CC error .
W
celu
zweryfikowania
normalności
rozkładu
uŜyty
został
test
Kołmogorowa
(skategoryzowany) [113] postaci:
Dn = sup Fn ( x) − F ( x)
−∞< x< ∞
Gdzie:
Fn (x) - gęstość rozkładu empirycznego
F (x) - gęstość rozkładu teoretycznego
Przedział [−0.04,0.76] został podzielony na 39 kategorii, w kaŜdej z nich została obliczona
odległość pomiędzy rozkładem empirycznym Fn (x ) a rozkładem teoretycznym F (x)
(normalnym) – rysunek 5.4. Wykonano w sumie 2697 pomiarów (93 dla kaŜdego z 29
testowanych konfiguracji algorytmów), stąd n = 2697 .
Tabela 5.3 Stabelaryzowany rozkład gęstości prawdopodobieństwa dla zmiennej losowej
CC error sporządzony
na potrzeby testu Kołmogorowa.
Górna
granica
kategorii
Liczebność Teoretyczna
obserwacji liczebność
obserwacji
Skumulowana
liczebność
obserwacji
(m)
Skumulowana
teoretyczne
liczebność
obserwacji ( mx )
m mx
−
n
n
<=-.0200
0.000
0.946
0.000
0.946
0.000
0.00000
0.000
0.754
0.000
1.700
0.001
.020000
0.000
1.279
0.000
2.979
0.001
90
.040000
2.000
2.112
2.000
5.091
0.001
.060000
2.000
3.395
4.000
8.486
0.002
.080000
6.000
5.312
10.000
13.798
0.001
.100000
13.000
8.092
23.000
21.889
0.000
.120000
27.000
11.998
50.000
33.887
0.006
.140000
36.000
17.317
86.000
51.204
0.013
.160000
42.000
24.331
128.000
75.535
0.019
.180000
31.000
33.278
159.000
108.814
0.019
.200000
33.000
44.307
192.000
153.121
0.014
.220000
47.000
57.424
239.000
210.545
0.011
.240000
59.000
72.448
298.000
282.992
0.006
.260000
96.000
88.975
394.000
371.967
0.008
.280000
91.000
106.371
485.000
478.338
0.002
.300000
118.000
123.790
603.000
602.128
0.000
.320000
140.000
140.237
743.000
742.365
0.000
.340000
116.000
154.650
859.000
897.015
0.014
.360000
151.000
166.015
1010.000
1063.030
0.020
.380000
171.000
173.483
1181.000
1236.514
0.021
.400000
171.000
176.473
1352.000
1412.987
0.023
.420000
172.000
174.747
1524.000
1587.734
0.024
.440000
163.000
168.443
1687.000
1756.178
0.026
.460000
153.000
158.055
1840.000
1914.233
0.028
.480000
159.000
144.369
1999.000
2058.602
0.022
.500000
157.000
128.366
2156.000
2186.968
0.011
.520000
124.000
111.106
2280.000
2298.074
0.007
.540000
114.000
93.613
2394.000
2391.687
0.001
.560000
100.000
76.780
2494.000
2468.466
0.009
.580000
75.000
61.301
2569.000
2529.767
0.015
.600000
47.000
47.643
2616.000
2577.410
0.014
.620000
34.000
36.045
2650.000
2613.455
0.014
.640000
24.000
26.546
2674.000
2640.001
0.013
.660000
9.000
19.031
2683.000
2659.032
0.009
.680000
6.000
13.281
2689.000
2672.313
0.006
.700000
8.000
9.022
2697.000
2681.335
0.006
.720000
0.000
5.967
2697.000
2687.302
0.004
.740000
0.000
3.841
2697.000
2691.143
0.002
91
D2697 = 0.028
λ2697 = 0.028 ⋅ 1000 ≈ 0.870
PoniewaŜ zaobserwowana wartość statystyki λ 2697 nie przekracza wartości krytycznej dla
p = 0.05 równej λ0.05 = 1.36 , dlatego teŜ nie ma powodu odrzucenia weryfikowanej hipotezy
na poziomie istotności 0.05.
Estymator odchylenia standardowego z próby o rozkładzie normalnym N ( µ , σ ) w wypadku,
gdy wartość oczekiwana (średnia) µ zmiennej losowej nie jest znana, zadany jest wzorem
[113]:
n
σ=
∑ (X − x )
2
i
i =1
n −1
Gdzie:
X - średnia z elementów próby
n – liczebność elementów próby
Błąd standardowy jest odchyleniem standardowym średniej i jest obliczany zgodnie ze
wzorem [94]:
sterror =
σ
n
Przedział ufności dla średniej określa zakres wartości wokół średniej, w którym przy danym
poziomie ufności 1 − α (z prawdopodobieństwem 1 − α ) oczekujemy „prawdziwej” średniej
( µ ) [94].
JeŜeli zmienna losowa X ma rozkład normalny N ( µ , σ ) z nieznaną wartością oczekiwaną µ
i z znanym odchyleniem standardowym σ , to dla ustalonego α moŜna wyznaczyć taką liczbę
u1−a / 2 (np. odczytać z tablic [113]), Ŝe:
σ
σ
P X − u1−a / 2
< µ < X + u1−a / 2
=1−α
n
n
σ
σ
Przedział X − u1−a / 2
, X + u1−a / 2
jest przedziałem ufności dla wartości oczekiwanej
n
n
µ , 1 − α jest poziomem ufności.
Dla α = 0.05 u1−a / 2 = 1.96 .
92
Tabela 5.4 Średnia, odchylenie standardowe, błąd standardowy oraz przedział ufności zmiennej losowej
CC error dla kaŜdego z testowanych algorytmów.
Oznaczenie Średnia
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
V
W
X
Y
Z
1
2
3
Odchylenie
0.220
0.325
0.326
0.339
0.357
0.351
0.337
0.374
0.377
0.344
0.247
0.134
0.423
0.448
0.438
0.359
0.247
0.440
0.451
0.428
0.488
0.510
0.506
0.472
0.462
0.434
0.521
0.518
0.511
Błąd stand.
0.082
0.069
0.068
0.070
0.068
0.070
0.071
0.086
0.065
0.046
0.048
0.039
0.088
0.082
0.079
0.085
0.099
0.079
0.072
0.059
0.080
0.078
0.077
0.075
0.083
0.081
0.077
0.083
0.086
Przedział ufności, α = 0.05
0.008
0.007
0.007
0.007
0.007
0.007
0.007
0.009
0.007
0.005
0.005
0.004
0.009
0.008
0.008
0.009
0.010
0.008
0.007
0.006
0.008
0.008
0.008
0.008
0.009
0.008
0.008
0.009
0.009
(0.203, 0.236)
(0.311, 0.339)
(0.312, 0.339)
(0.325, 0.354)
(0.343, 0.371)
(0.336, 0.365)
(0.323, 0.351)
(0.356, 0.391)
(0.364, 0.390)
(0.335, 0.353)
(0.238, 0.257)
(0.126, 0.142)
(0.405, 0.441)
(0.431, 0.464)
(0.422, 0.454)
(0.342, 0.376)
(0.227, 0.267)
(0.424, 0.456)
(0.437, 0.466)
(0.416, 0.440)
(0.471, 0.504)
(0.494, 0.526)
(0.490, 0.521)
(0.457, 0.487)
(0.445 , 0.479)
(0.418, 0.451)
(0.505, 0.537)
(0.502, 0.535)
(0.494, 0.529)
W celu wyznaczenia najlepszej metody dopasowania dla atlasu mózgu (biorąc jako
kryterium wartość CC ( A, B ) error ) naleŜy oprócz znalezienia wartości średniej, odchylenia
standardowego oraz przedziału ufności CC ( A, B ) error dla kaŜdego z testowanych algorytmów
sprawdzić, czy róŜnice pomiędzy algorytmami są istotne z punktu widzenia statystycznego.
Aby tego dokonać naleŜy wyznaczyć:
Liczba punktów swobody:
s1 = k − 1 = 29 − 1 = 28
s2 = n − k = 2697 − 29 = 2668
Gdzie:
k – liczba czynników klasyfikacyjnych (róŜnych algorytmów)
n – liczba wszystkich obserwacji
93
Sumę kwadratów wewnętrznych grupowych odchyleń zmiennej:
ni
SSE = ∑∑ ( yij − yi ) ≈ 14.982
k
2
i =1 j =1
Oraz średnią wewnętrznych grupowych odchyleń zmiennej:
MSE =
SSE 14.982
=
≈ 0.006
n−k
2668
Dla α = 0.05 i przy liczbie stopni swobody s2 = 2668 wartość t odczytana z tablic wynosi:
t 0.05, 2668 = 1.96
Oceny istotności róŜnic moŜna dokonać przy uŜyciu testu NIR (najmniejszej istotnej róŜnicy)
[94]. Definicja testu NIR dostosowana do rachunków wariancji oraz regresji oparta na
statystyce t - Studenta ma postać:
1 1
NIR = tα ,s MSE + , i ≠ j
n n
j
i
Krytyczne poziomy istotności dla ocen modułów róŜnic średnich warunkowych określane są
jako:
P t ≥
^
yi − y j
=α
1 1
MSE +
n n
j
i
yi − y j
Wartość P( t ≥ t 0.05, 2668 ) moŜe zostać odczytana z tablic [113]. Wyniki testu NIR dla
algorytmów dopasowania podane są w tabeli 5.5 oraz na rysunkach 5.5 i 5.6.
94
95
Rysunek 5.5 Odchylenie standardowe, błąd standardowy oraz średnia zmiennej losowej CCerror dla kaŜdego z testowanych algorytmów.
96
Rysunek 5.6 Przedział ufności, błąd standardowy oraz średnia zmiennej losowej CCerror dla kaŜdego z testowanych algorytmów.
97
róŜnice.
Tabela 5.5 Wyniki testu istotności NIR dla algorytmów dopasowania obrazów. Na czerwono zaznaczono istotne w sensie statystycznym
Spośród testowanych algorytmów najlepszą średnią minimalizację błędu względnego
osiągnięto dla algorytmu (1) – FFD ( CCerror = 0.521 ), siatka o rozmiarach 6x6, 12 iteracji, 2
zagęszczenia siatki, z dodatkową rotacją i skalowaniem. Zgodnie z wynikami testu NIR, nie
ma istotnych róŜnic pomiędzy algorytmem (1) a algorytmami (2), (3), (v) i (w). Wszystkie te
algorytmy są algorytmami FFD z dodatkową rotacją i skalowaniem.
Najgorszy
wynik
osiągnął
algorytm
oparty
na
transformacji
afinicznej
( CCerror = 0.220 ), oraz dla algorytmy FFD z gęstą siatką (32x32) CCerror = 0.134 . Przy
pomocy transformacji afinicznej nie moŜna prawidłowo zamodelować lokalnych róŜnic
pomiędzy zobrazowaniami, natomiast zbyt gęsta siatka w początkowej fazie FFD nie pozwala
na zamodelowanie globalnych róŜnic (skalowanie / translacja / rotacja).
W wypadku algorytmu Thiriona (przypadki (b) – (g)) test NIR nie wykazał istotnych
róŜnic pomiędzy algorytmami z róŜną wartością parametru σ (wariancji) w filtrze Gaussa
wygładzającym pole deformacji.
Największe zróŜnicowanie osiągnięto przy zastosowaniu róŜnych parametrów
algorytmu FFD. Zarówno zastosowanie zbyt rzadkiej siatki ((h), (m)) jak i zbyt gęstej ((l),
(q)) nie prowadzi do osiągnięcia zadawalających wyników. Znaczącą poprawę rezultatów
dopasowania osiągnięto przez zastosowanie jednocześnie metody zagęszczania siatki oraz
wstępnej rotacji i skalowania obrazu ruchomego.
Ostatecznie, w celu konstrukcji deformowalnego atlasu mózgu autor wybrał algorytm
(1), poniewaŜ przy jego pomocy osiągnięto najlepszą minimalizację CCerror .
Przykładowe wyniki dopasowania dwóch zobrazowań mózgu przy pomocy róŜnych
algorytmów dopasowania przedstawione są na rysunku 5.7. W pierwszym rzędzie znajdują się
dwie pary zobrazowań TK. Po lewej w kaŜdej z par statyczny obraz TK nałoŜony na ruchomy
obraz TK przed zastosowaniem algorytmu dopasowania. Po prawej statyczne zobrazowanie
TK z nałoŜoną na niego etykietą ruchomego obrazu przed zastosowaniem algorytmu
dopasowania. W kolejnych rzędach widoczne są efekty działania algorytmów dopasowania:
transformacji afinicznej przy pomocy metody Neldera – Meada, algorytmu Thiriona i FFD
(siatka o rozmiarach 6x6, 12 iteracji, 2 zagęszczenia siatki, dodatkowa rotacja i skalowanie).
Po lewej w kaŜdej z par statyczny obraz TK nałoŜony na ruchomy obraz TK po zastosowaniu
algorytmu dopasowania. Po prawej statyczne zobrazowanie TK z nałoŜoną na niego etykietą
ruchomego obrazu po zastosowaniu algorytmu dopasowania. Algorytm dopasowania z
zastosowaniem transformacji afinicznej nie moŜe skorygować lokalnych róŜnic pomiędzy
98
zobrazowaniami, stąd teŜ niska wartość CC ( A, B ) error tego algorytmu. Algorytm Thiriona w
wersji zastosowanej w tej rozprawie ignoruje całkowicie wewnętrzną teksturę zobrazowania,
natomiast pozwala na dokładne dopasowanie krawędzi zobrazowania (stąd lepsze rezultaty
tego algorytmu niŜ metody opartej na transformacie afinicznej). W przypadku atlasu mózgu
waŜniejsze jest jednak prawidłowe dopasowanie wewnętrznej struktury mózgowia niŜ
brzegów zobrazowania. W wypadku algorytmu FFD waŜnym czynnikiem jest dobór
parametru algorytmu – w pierwszej fazie siatka węzłów powinna być wystarczająco „rzadka”,
aby skorygować globalne róŜnice pomiędzy zobrazowaniami, a w ostatniej dostatecznie gęsta,
aby skompensować róŜnice lokalne.
Rysunek 5.7 Przykładowe wyniki działań poszczególnych algorytmów dopasowania obrazów. Dokładny opis
znajduje w tekście.
W wyniku przeprowadzonych badań wykazano zatem, Ŝe najlepszym algorytmem jest
metoda rejestracji FFD z siatką o rozmiarach 6x6, 12 iteracjami, 2 zagęszczeniami siatki oraz
dodatkową rotacją i skalowaniem. Taką właśnie technikę wykorzystywano w analizie
wszystkich dostępnych zobrazowań, dla których przeprowadzono etap dopasowania.
99
6. Algorytmy oceny znaczenia zmian
chorobowych
W
rozdziale
III
omówiony
został
algorytm
automatycznego
wykrywania
potencjalnych zmian chorobowych na mapach perfuzji mózgowej. Na tym etapie nie
wiadomo jednak, z jaką zmianą chorobową mamy do czynienia, ani w której półkuli
mózgowej jest ona usytuowana. Prawidłowa interpretacja dokonywana jest przez lekarza
bazującego na swojej wiedzy medycznej. W dalszej części rozdziału zaprezentowany zostanie
algorytm, z pomocą którego moŜna dokonać automatycznego określenia typu zmian
chorobowych oraz rokowań dla chorych tkanek. Informacje medyczne wykorzystywane przez
poniŜsze metody zostały przedstawione w paragrafie 2.3.4.
6.1 Określenie typu zmiany chorobowej
Określenie typu zmiany chorobowej w algorytmie zaproponowanym przez autora
niniejszej dysertacji dokonywane jest na podstawie porównania prawidłowych wartości
parametrów perfuzji CBF i CBV ze średnimi wartościami zmierzonymi w symetrycznych
ROI znajdujących się w obu półkulach. I tak w celu określenia lokalizacji, w której półkuli
mózgowej występuje zmiana chorobowa, moŜna zastosować następującą procedurę.
JeŜeli spełniony jest warunek:
CBFL − CBFA > CBFR − CBFA (6.1)
Gdzie:
CBFL - średnia wartość CBF dla ROI leŜącego w lewej półkuli
CBFR - średnia wartość CBF dla ROI leŜącego w prawej półkuli
CBFA - prawidłowa wartość perfuzji (zgodnie z tabelą 1.1 wynosi on 55 ml/100 g/min)
Mamy do czynienia ze zmianą chorobową w lewej półkuli. Wynika to z faktu, Ŝe moduł
róŜnicy pomiędzy prawidłową a obserwowaną wartością perfuzji w lewej półkuli jest większy
niŜ moduł róŜnicy pomiędzy prawidłową a obserwowaną wartością perfuzji w prawej półkuli
mózgowej.
100
Rodzaj zmiany moŜe natomiast zostać określony poprzez zbadanie warunku:
JeŜeli CBFL < CBFA to zmiana ma charakter niedokrwienny (o takim rodzaju zmiany
świadczy spadek obserwowanej wartości CBF poniŜej wartości prawidłowej), w przeciwnym
wypadku jest to zmiana krwotoczna.
I analogicznie dla prawej półkuli.
JeŜeli:
CBFL − CBFA < CBFR − CBFA (6.2)
To mamy do czynienia ze zmianą chorobową w prawej półkuli.
JeŜeli CBFR < CBFA to zmiana ma charakter niedokrwienny, w przeciwnym wypadku jest to
zmiana krwotoczna.
Analogicznie określany jest charakter asymetrii na mapach CBV.
JeŜeli spełniony jest warunek:
CBVL − CBV A > CBVR − CBV A (6.3)
Gdzie:
CBVL - średnia wartość CBV dla ROI leŜącego w lewej półkuli
CBVR - średnia wartość CBV dla ROI leŜącego w prawej półkuli
CBV A - prawidłowa wartość perfuzji (zgodnie z tabelą 1.2 wynosi on 2.5 ml / 100g)
To mamy do czynienia ze zmianą chorobową w lewej półkuli (rozumowanie jest analogiczne
jak w wypadku wzoru (6.2)).
JeŜeli CBVL < CBV A to zmiana ma charakter niedokrwienny, w przeciwnym wypadku jest to
zmiana krwotoczna.
JeŜeli:
CBVL − CBV A < CBVR − CBV A (6.4)
To mamy do czynienia ze zmianą chorobową w prawej półkuli.
JeŜeli CBVR < CBV A to zmiana ma charakter niedokrwienny, w przeciwnym wypadku jest to
zmiana krwotoczna (rysunek 6.1).
101
Rysunek 6.1 Określenie typu zmiany chorobowej. (A) zobrazowania CBF (na górze), CBV (na dole). (B) wyniki
detekcji asymetrii. Wartość perfuzji CBF w ROI w prawej półkuli mózgowej (lewa strona zobrazowania) wynosi
8.96 ml/100 g/min, w lewym ROI zobrazowania 69.01 ml/100 g/min. Zgodnie z (6.2) mamy do czynienia ze
zmianą niedokrwienną w prawej półkuli. Wartość perfuzji CBV perfuzja w prawym ROI 0.88 ml / 100g, w
lewym 3.54 ml / 100g, zgodnie z (6.4) jest to zmiana niedokrwienna w prawej półkuli. (C) Zaznaczone
potencjalne zmiany chorobowe.
Znajomość charakteru zmian na mapach CBF i CBV pozwala przejść do kolejnego
kroku analizy zobrazowań perfuzyjnych, w którym ocenia się potencjalne zagroŜenie dla
tkanek mózgowych, w wypadku jeŜeli zmierzone wartości przepływu krwi utrzymają się na
niezmienionym poziomie.
6.2 MoŜliwości określenia rokowań dla chorych tkanek
Przy pomocy badań dynamicznej perfuzji TK moŜliwe jest wykrycie rejonów mózgu z
deficytem przepływu krwi zanim zostaną one uwidocznione na „klasycznych” (nie
zakontrastowanych) zobrazowaniach TK [89]. Wielkość deficytu perfuzji uwidocznionej na
pTK jest skorelowana z prognozami dalszego przebiegu choroby pacjenta. Przegląd literatury
poruszającej temat prognostycznego znaczenia map perfuzji mózgowej pTK został
przedstawiony w paragrafie 2.3.4. Na jej podstawie autor dysertacji stworzył algorytm
pozwalający na automatyczne określenie rokowań dla tkanek objętych zaburzeniem perfuzji
mózgowej. Algorytm dokonuje porównania obszarów asymetrii wykrytych na mapach CBF i
102
CBV i dzięki pomocy specjalistycznej wiedzy medycznej streszczonej w podrozdziale 2.3.4,
klasyfikuje kaŜdy z pikseli zobrazowania mózgu pacjenta do jednej z trzech grup:
1) Tkanki, które mogą przetrwać nieuszkodzone stan niedokrwienny;
2) Tkanki, które zostaną objęte udarem;
3) Tkanki, w których zostaną uruchomione mechanizmy autoregulacji krąŜenia.
Do grupy 1 naleŜą te piksele obrazu, które:
-
NaleŜą do ROI asymetrii dla mapy CBF i CBV natomiast wartość rCBF nie spadła
poniŜej 0.48 - granicznej wartości wyznaczającej rejon objęty udarem [50].
Do grupy 2 moŜna zaliczyć te punkty, które spełniają warunek:
-
NaleŜą do ROI asymetrii dla mapy CBF i CBV natomiast wartość rCBF spadła
poniŜej 0.48.
Do grupy 3 zalicza się punkty, które:
-
NaleŜą do ROI asymetrii dla mapy CBF natomiast mają prawidłową lub podwyŜszoną
wartość CBV (poniewaŜ według [3] obniŜona wartość CBF przy prawidłowej lub
podwyŜszonej
wartości
CBV
oznacza
zazwyczaj
prawidłowe
uruchomienia
mechanizmów autoregulacji w obszarze objętym niedokrwieniem i pozwala
oczekiwać, Ŝe nie ulegnie on martwicy nawet w przypadku nie wystąpienia
reperfuzji).
Na rysunku 6.2 przedstawiono wyniki działania powyŜszego algorytmu. Na obrazie tym
potencjalne obszary asymetrii perfuzji zostały nałoŜone na zobrazowanie CT. Na czerwono
zaznaczono takŜe obszar, który zostanie objęty udarem, na niebiesko tkanki, w których
zostanie uruchomiony mechanizm autoregulacji.
103
Rysunek 6.2 Wyniki działania algorytmu oceniającego rokowania dla chorych tkanek. Potencjalne obszary asymetrii perfuzji
zostały nałoŜone na zobrazowanie CT. Opis w tekście.
6.3 Badanie skuteczności algorytmów rozpoznawania
Na skuteczność algorytmu określającego znaczenie zmian chorobowych, decydujący
wpływ mają wyniki otrzymane z algorytmu automatycznego wykrywania potencjalnych
zmian chorobowych na mapach perfuzji mózgowej, który to algorytm wykonywany jest jako
pierwszy. JeŜeli pierwszy algorytm da nieprawidłowe wyniki, ocena znaczenia zmian
chorobowych kolejnym algorytmem nie moŜe być brana pod uwagę w procesie
diagnostycznym.
W rozwaŜanym zbiorze testowym, dla kaŜdego przypadku, w którym algorytm
detekcji zmian chorobowych zwrócił prawidłowe wyniki, prawidłowo określone zostały
równieŜ połoŜenie oraz typ zmiany chorobowej. MoŜna zatem oszacować skuteczność tej
metody na poziomie 77.0% jeŜeli zastosowany zostanie algorytm półautomatycznej detekcji
(z moŜliwością dokonywania manualnej korekcji pozycji osi symetrii mózgowia).
Określenie rokowań dla chorych tkanek jest bardziej złoŜonym procesem. W praktyce
perfuzja mózgowa jest jednym z wielu badań, które wykonywane są w celu rozpoznania
choroby pacjenta, dlatego teŜ brak obecności zmian perfuzyjnych nie ma decydującego
znaczenia dla wykluczenia moŜliwości wystąpienia udaru mózgu [101]. U ośmiu pacjentów z
testowanego zbioru, pomimo braku widocznych zaburzeń przepływu krwi, w ostatecznym
rozpoznaniu lekarz zdiagnozował udar. W rozwaŜanym zbiorze testowym, dla kaŜdego
przypadku, w którym algorytm detekcji zmian chorobowych zwrócił prawidłowe wyniki,
prawidłowo określony została równieŜ rokowania dla chorych tkanek (z wyjątkiem wyŜej
wymienionych ośmiu przepadkach, w których ostateczna diagnoza podjęta została na
podstawie innych badań).
104
W konstrukcji algorytmu, który trafniej oceniałby rokowania tkanek oraz stawiał
diagnozę nie tylko w oparciu o zestaw map CBF i CBV, naleŜałoby wziąć pod uwagę wyniki
badań, które zazwyczaj wykonywane są w takich wypadkach: TK, RM, angiografię oraz
pozostałe dane kliniczne [101].
Podsumowując: moduł określający typ zmiany chorobowej nie wymaga dalszych
modyfikacji. Algorytm zaproponowany w tej pracy pozwala na ocenę rokowań tkanek
mózgowych oraz trafną diagnozę stanu chorobowego pod warunkiem, Ŝe w jej efekcie
nastąpiło zaburzenie przepływu krwi. Moduł stawiający diagnozę oraz oceniający rokowania
powinien zostać rozbudowany o moŜliwość symultanicznej oceny map perfuzji z
uwzględnieniem wyników pozostałych badań wykonanych w procesie diagnostycznym,
poniewaŜ brak obecności zmian perfuzji nie ma decydującego znaczenia przy wykluczeniu
obecności udaru mózgu. Modyfikacja ta wymaga zgromadzenia kompletnych danych
obrazowych pacjentów ze wszystkich przeprowadzonych obserwacji (zobrazowań) oraz
przeprowadzenia dalszych badań.
105
7. Architektura systemu analizującego
zobrazowania diagnostyczne pTK
W poprzednich rozdziałach zostały omówione kolejne etapy automatycznego
generowania diagnozy zobrazowań perfuzyjnych. W rozdziale III przedstawiony został
algorytm wykrywający asymetrie map przepływu krwi. W rozdziale V skonstruowany został
atlas mózgu, który moŜe zostać uŜyty do opisu zobrazowań TK. W rozdziale VI
przedstawiono algorytm, który pozwala ocenić typ zmiany chorobowej oraz określić na ich
podstawie rokowanie dla tkanek objętych zaburzeniami perfuzji. W niniejszym rozdziale
przedstawiona zostanie natomiast struktura systemu stworzonego przez autora tej rozprawy,
który pozwala na kompleksową i automatyczną analizę map pTK.
Badania kliniczne oparte na analizie obrazów stają się coraz ściślej powiązane z
wykorzystaniem technologii informatycznych. W obecnej chwili powszechnie stosowane są
trzy rodzaje komputerowego wspomagania diagnostyki [74]:
-
Przetwarzanie
obrazów
(poprawianie
jakości,
wyszczególnienie
obiektów
zainteresowania spośród tła etc.);
-
Analiza obrazu (obliczanie wybranych parametrów całego obrazu lub jego części
składowych);
-
Rozpoznawanie wzorców (identyfikacja oraz klasyfikacja wyszczególnionych
elementów obrazu).
Nowym kierunkiem komputerowych technik analizy są metody automatycznego rozumienia
obrazów [74], [76] ukierunkowane na znaczeniową analizę zobrazowań np. medycznych.
Semantyczna interpretacja obrazu jest całkowicie nowym podejściem, które pozwala – w
podobny sposób jak dokonuje tego lekarz – na wyciągniecie wniosków dotyczących natury
obserwowanego procesu chorobowego oraz metod jego leczenia. Autor tej rozprawy
zdecydował się zastosować trzy wyŜej wymienione metody komputerowego wspomagania
diagnostyki, dzięki czemu skonstruowany system (nazywany w dalszym ciągu rozprawy
systemem DMD – ang. Detection, Measure and Description system – wykrywającym,
dokonującym
pomiarów
oraz
opisującym)
moŜe
być
traktowany
jako
system
„automatycznego rozumienia” map perfuzji. Schemat zastosowania podstawowych metod
wspomagania diagnostyki w celu „zrozumienia” mapy perfuzji przedstawiony został na
106
rysunku 7.1 Cały proces jest połączeniem przetwarzania obrazów, analizy obrazów,
rozpoznawania wzorców oraz znajomości wiedzy medycznej na temat rozwaŜanego
zagadnienia,
dzięki
czemu
uwidocznione
symptomy
choroby
zostaną
właściwie
zinterpretowane. Dane wyjściowe z kaŜdego z etapów algorytmu dostarcza danych
wejściowych do kolejnego etapu. System ocenia, czy na analizowanej mapie znajdują się
zmiany patologiczne, mierzy ich parametry, determinuje typ (niedokrwienne/krwotoczne)
oraz stawia prognozy dotyczące dalszego rozwoju choroby (rysunek 7.1).
Rysunek 7.1 Schemat zastosowania podstawowych metod wspomagania diagnostyki prowadzących do
„zrozumienia” medycznego znaczenia mapy perfuzji.
KaŜdy z wymienionych etapów zaproponowanej procedury określania semantyki map
perfuzji wykonywany jest przez algorytmy omówione w poprzednich rozdziałach. Danymi
wejściowymi dla całego procesu są mapy CBF, CBV oraz jedno z zobrazowań TK, które
zostało wykorzystane w celu sporządzenia map perfuzji na którym nie ujawniła się jeszcze
substancja kontrastująca (rysunek 7.2 A).
Etap przetwarzania obrazu (rysunek 7.2 B) wykonywany jest przez algorytm z
rozdziału III, który wykrywa potencjalne obszary asymetrii (zmian chorobowych)
wyznaczając na obrazie obszar dalszej analizy (ROI). Następnie uwidocznione zmiany zostają
opisane przy pomocy deformowalnego atlasu mózgu opartego na FFD, którego konstrukcja
została opisana w rozdziale V. Atlas dokonuje dopasowania poprzecznych wzorcowych
obrazów TK na wejściowym zobrazowaniu TK. Dzięki temu uzyskany opis połoŜenia
107
poszczególnych tkanek mózgu moŜe zostać uŜyty do mapowania tych tkanek na
zobrazowaniach perfuzyjnych.
Kolejny etap – analiza obrazu (rysunek 7.2 C) – realizowana jest równieŜ przez
algorytm z rozdziału III. Wszystkie istotne parametry perfuzji takie jak: objętość ROI, CBFL ,
CBFR CBFL / P , CBFP / L , CBV L , CBV R , CBVL / P , CBVP / L (omówione w rozdziale II) mogą
zostać odczytane bezpośrednio z map zaraz po wyznaczeniu ROI.
Ostatni etap – rozpoznawanie wzorców (rysunek 7.2 D) – wykonywane jest przez
algorytm z rozdziału VI. Algorytm na podstawie zgromadzonej wiedzy medycznej decyduje,
w której półkuli mózgowej znajduje się zmiana chorobowa. Następnie algorytm podejmuje
decyzję, czy zmiana ta jest zmianą niedokrwienną czy krwotoczną. Ostatecznie stawia
prognozę dotyczącą dalszego rozwoju choroby w wybranych tkankach: czy mogą przetrwać
nieuszkodzone stan niedokrwienny, czy zmiany będą dalej postępować lub czy został
uruchomiony mechanizm autoregulacji krąŜenia.
Połączenie algorytmów przetwarzania, analizy, rozpoznawania obrazów oraz medycznej
wiedzy pozwala na przeprowadzenie kognitywnego rozumowania [74], [76] w wyniku
którego moŜliwe jest automatyczne uzyskanie opisu zobrazowania oraz interpretacji
znaczenia występujących na nim obiektów, w podobny sposób do tego, w jaki dokonuje tego
lekarz – diagnosta (rysunek 7.2 E).
108
109
Rysunek 7.2 Schemat zastosowania podstawowych metod wspomagania diagnostyki w celu „zrozumienia” mapy perfuzji. Opis w tekście.
8. Podsumowanie wyników badań
Do chwili obecnej zostało opracowane wiele metod wykorzystywanych do
generowania i analizy obrazów dynamicznej perfuzji TK ([115], [5], [15], [87]). Autor tej
dysertacji nie znalazł jednak Ŝadnej pozycji w literaturze podejmującej całościowo
zagadnienie automatycznej, komputerowej analizy map perfuzji mózgowej TK. W ostatnich
latach podejmowane były badania nad metodami automatycznej analizy map perfuzyjnych
pozyskanych przy pomocy innych rodzajów badań radiologicznych. W pracy [56] autorzy
korzystają z atlasu mózgu w celu analizy map perfuzji uzyskanych przy pomocy SPECT. Inne
podejście moŜna spotkać w [71], gdzie autorzy automatycznie odnajdują obszary mózgu
potencjalnie objęte udarem, natomiast wykorzystują do tego jedynie zobrazowania 3D RM.
Ta luka badawcza zachęciła Autora do poszukiwania innych rozwiązań i w efekcie do
zaproponowania nowych i jak wykazały otrzymane rezultaty skutecznych metod.
Diagnozowanie map perfuzji jest złoŜonym zagadnieniem, głównie ze względu na
następujące trudności:
-
DuŜe zróŜnicowanie kształtów map perfuzji mózgowych wynikające z analizowania
roŜnych przekrojów aksjalnych jak równieŜ cech osobniczych pacjentów.
-
Zaszumienie map perfuzyjnych poprzez artefakty ruchowe [31] powstałe na skutek
stosunkowo długiego czasu akwizycji obrazów TK (ok. 40 sekund).
-
Naturalna
niewielka
asymetria
przepływu
krwi,
która
moŜe
być
błędnie
interpretowana jako zmiana chorobowa.
-
W
celu
postawieniu
diagnozy naleŜy dokonać jednoczesnej
analizy map
przestawiających wartości róŜnych parametrów perfuzji (CBF i CBV).
W niniejszej pracy zaproponowano nową metodologię automatycznej analizy i
interpretacji obrazów, która pozwala – w podobny sposób jak dokonuje tego specjalista – na
wyciągnięcie
pewnych
wniosków
dotyczących
natury
obserwowanego
procesu
chorobowego.. Cały proces takiej analizy jest połączeniem technik przetwarzania, analizy
obrazów, rozpoznawania wzorców oraz znajomości wiedzy medycznej na temat rozwaŜanego
zagadnienia,
dzięki
czemu
uwidocznione
symptomy
choroby
zostaną
właściwie
„zrozumiane”. W skład etapu przetwarzania obrazów wchodzi algorytm wykrywania
asymetrii map perfuzji oraz algorytm dopasowania obrazów. Wykrywanie asymetrii
dokonywane jest przy pomocy uniwersalnego algorytmu, który w odróŜnieniu od innych
110
popularnych rozwiązań [54], [120] w sposób całkowicie
automatyczny
wyodrębnia
potencjalne obszary chorobowe. NaleŜy równieŜ zaznaczyć, Ŝe zastosowanie przez autora tej
pracy dwuwymiarowego atlasu TK do opisu struktur widocznych na mapach perfuzji
mózgowej nie było do tej pory opisywane w literaturze.
Na etapie rozpoznawania obrazów zaproponowany algorytm ocenia typ zmiany
chorobowej oraz przekazuje informacje, w której półkuli mózgowej została ona wykryta. W
celu przeprowadzenia tego procesu konieczne jest jednak zgromadzenie wiedzy medycznej na
temat prawidłowych wartości parametrów perfuzji. Ostatecznie algorytm stawia prognozę
dotyczącą dalszego rozwoju choroby w wybranych tkankach: czy mogą przetrwać
nieuszkodzone stan niedokrwienny, czy zmiany będą dalej postępować lub czy został
uruchomiony mechanizm autoregulacji krąŜenia. Identyfikacja zagroŜonych tkanek oraz typu
schorzenia ma decydujące znaczenie przy wyborze metody leczenia [101].
W prowadzonych badaniach naukowych Autor postawił następującą tezę:
MoŜliwe jest opracowanie nowych efektywnych algorytmów i metod analizy,
pozwalających na dokonanie w sposób automatyczny:
-
Detekcji potencjalnych zmian o charakterze morfologicznym lub strukturalnym,
mogących świadczyć o stanach chorobowych, uwidacznianych na dynamicznych
mapach perfuzji mózgowej tomografii komputerowej;
-
Klasyfikacji znaczeniowej pojedynczych lub wielokrotnych zmian patologicznych o
charakterze ogniskowym uwidacznianych na mapach przepływu krwi mózgowia, a
takŜe określenie ich semantycznego znaczenia, w celu wspomagania procesów
diagnostycznych stanu pacjenta.
Realizacja tak postawionej tezy oraz związanych z nią celów badawczych, pozwoliła
na opracowanie nowych algorytmów pozwalających na automatyczną ocenę prawidłowości
przepływu krwi w zobrazowaniach perfuzyjnych, a takŜe detekcję potencjalnych ognisk
choroby oraz sporządzenie opisu znaczeniowego zaobserwowanej patologii.
Badania prowadzone w celu wykazania tezy rozprawy prowadzone były dwuetapowo.
W obu etapach wykorzystano materiał badawczy opisany w paragrafie 2.5. Pierwszy etap
skoncentrowany był na opracowaniu metod wykrywania potencjalnych zmian chorobowych
na mapach CBF [34], rozszerzeniu ich na inne typy [29], [32] oraz identyfikacji tkanek
mózgowych objętych zmianami chorobowymi [31], [37]. W rozdziale 3 zaprezentowano
algorytm automatycznego wykrywania potencjalnych zmian chorobowych na mapach perfuzji
111
mózgowej. Rezultaty przeprowadzonych testów przedstawione w paragrafie 3.4 potwierdziły
skuteczność zaproponowanych metod szacowaną na poziomie 77.0%. W rozdziale 4
szczegółowo przedstawiono i porównano trzy popularne techniki dopasowania obrazów,
spośród których w rozdziale 5 wybrano algorytm najlepiej dopasowujący obrazy TK.
Algorytm ten został uŜyty w celu konstrukcji deformowalnego atlasu mózgu.
W drugim etapie zrealizowano klasyfikację typu, miejsca występowania zmiany
chorobowej [36] a takŜe określenie ich semantycznego znaczenia [35], [33] w celu
wspomagania procesów diagnostycznych stanu pacjenta. Metody te zostały przedstawione w
rozdziale 6. Otrzymane wyniki testów potwierdzają przydatność metody do klasyfikacji
wzorców pTK oraz diagnostyki zmian chorobowych charakteryzujących się zaburzeniami
przepływu krwi w tkance mózgowej. Zestaw algorytmów powstałych w wyniku powyŜszych
badań pozwolił na stworzenie systemu, który dokonuje kompleksowej i automatycznej
analizy map pTK. Struktura systemu została zaprezentowana w rozdziale 7.
MoŜna zatem jednoznacznie stwierdzić, Ŝe postawiona na wstępie tej dysertacji teza o
moŜliwości opracowania skutecznych metod automatycznego wspomagania procesów
diagnostycznych stanu pacjenta w oparciu o dynamiczne mapy perfuzji mózgowej została
całkowicie wykazana.
PoniewaŜ realizacja zadań prowadzących do wykazania tezy nie wyczerpuje
wszystkich ciekawych z naukowego punktu widzenia problemów, moŜna wskazać dalsze
istotne kierunki prowadzonych badań:
-
MoŜliwość zestawienia patologicznych zmian występujących na zobrazowaniach
TK/RM ze zmianami wykrytymi na mapach dpCT (jest to waŜny czynnik brany pod
uwagę podczas prognozowania ewolucji zmian chorobowych) [101].
-
Rozszerzenie moŜliwości
zastosowania opracowanych
algorytmów
dla map
perfuzyjnych otrzymanych przy pomocy medycyny nuklearnej (PET / SPECT) [106].
-
Rozszerzenie moŜliwości diagnostycznych systemu poprzez dodanie dodatkowego
atlasu mózgu, który pozwoli na zróŜnicowanie tkanek w zaleŜności od tętnicy, która
dostarcza do nich krew (ang. bloody supply territories atlas (BST) [23]).
-
Zastosowanie alternatywnych metod dopasowania obrazów (np. [68]), które mogą
okazać się skuteczniejsze przy dopasowaniu zaszumionych dwuwymiarowych
zobrazowań tomografii komputerowej.
-
Wykorzystanie stworzonych rozwiązań przy tworzeniu inteligentnych systemów
kognitywnej analizy zobrazowań diagnostycznych typu UBIAS i E-UBIAS [75], [76].
112
-
PoniewaŜ zaprezentowane w pracy osiągnięcia wpisują się w waŜny nurt informatyki
związany
z
tworzeniem
zaawansowanych
systemów
rozpoznawania
zmian
patologicznych oraz wspomagania procesów diagnostycznych w medycynie, autor
planuje w oparciu o współpracę z ośrodkami medycznymi rozwijać zaproponowane
algorytmy w kierunku moŜliwości ich aplikacji do szerzej rozumianych zadań
diagnostycznych, bazujących na obszernych rekordach informacyjnych w tym danych
pochodzących z badań obrazowych perfuzji mózgowej lub badań innych narządów i
struktur poddawanych procesom diagnostycznym.
113
Literatura
[1]
Audette M. A., Tsukuba N., Siddiqi K., Ferrie F. P., Peters T. M., Ontario W., An integrated rangesensing, segmentation and registration framework for the characterization of intra-surgical brain
deformations in image-guided surgery, Source Computer Vision and Image Understanding archive,
Volume 89 , Issue 2-3 (February 2003), Pages: 226 - 251
[2]
Adriane Parraga A., et all., Non-rigid registration methods assessment of 3D CT images for head-neck
radiotherapy, Proceedings of SPIE Medical Imaging, February, 2007
[3]
Aksoy F., Lev M., Dynamic Contrast-Enhanced Brain Perfusion Imaging: Technique and Clinical
Applications, Seminars in Ultrasound, CT, and MRI, Volume 21, Issue 6, Pages 462-477
[4]
Allchin, D. 2001. Error Types, Perspectives on Science 9:38-59.
[5]
Axel L., Cerebral blood flow determination by rapid-sequence computed tomography: a theoretical
analysis, Radiology 1980; 137:679-686
[6]
Bańowski J. Encyklopedia fizyki, PWN, Warszawa 1972
[7]
Bardera A., Boada I., Feixas M., A Framework to Assist Acute Stroke Diagnosis, Vision, Modeling,
and Visualization (VMV 2005), Erlangen, 2005
[8]
Bardinet E., Cohen L. D., Ayache N., Tracking and motion analysis of the left ventricle with
deformable superquadrics, Med. Image Anal.,vol. 1, no. 2, pp. 129-149, 1996
[9]
Baron J., Gruszczyńska K., Kompleksowa diagnostyka naczyń domózgowych - DSA, angiografia TK i
angiografia MR, Oświata UN-O, Warszawa 2007
[10]
Bro-Nielsen M., Gramkow C., Fast Fluid Registration of Medical Images, Lecture Notes In Computer
Science; Vol. 1131, 199
[11]
Bro-Nielsen M., Medical Image Registration and Surgery Simulation, Informatics and Mathematical
Modelling, Technical University of Denmark, Ph.D. thesis, 1996
[12]
Brzewski M., Diagnostyka ultrasonograficzna OUN w pediatrii, Postępy neuroradiologii, Oświata UNO, Warszawa 2007
[13]
Cała J., Czekierda Ł., TeleDICOM - the environment for Collaborative medical consultations,
International Conference on e-Health in Common Europe, Kraków 5-6/06/2003.
[14]
Carroll T. J., Rowley H. A., Haughton V. A., Automatic Calculation of the Arterial Input Function for
Cerebral Perfusion Imaging with MR Imaging, Radiology 2003; 227:593-600
[15]
Cenic A., Nabavi D. G., Craen R. A., Gelb A. W., Lee T. Y., Dynamic CT Measurement of Cerebral
Blood Flow: A Validation Study, January 1999
[16]
Chou Y.C., Teng M.M., Guo W.Y., Hsieh J.C., Wu Y.T., Classification of hemodynamics from
dynamic-susceptibility-contrast magnetic resonance (DSC-MR) brain images using noiseless
independent factor analysis, Medical Image Analysis 11 (2007), 242-253
[17]
Cytowski J., Gielecki J., Gola A., Cyfrowe przetwarzanie obrazów medycznych. Algorytmy.
Technologie. Zastosowania, Akademicka oficyna wydawnicza EXIT, Warszawa 2008
[18]
D'Agostino E., Maes F., Vandermeulen D., Suetens P., A viscous fluid model for multimodal non-rigid
image registration using mutual information, Medical Image Analysis 7, 2003
[19]
De Bruijne M., Niessen W. J., Maintz J. B. A., Viergever M. A., Localization and segmentation of
aortic endografts using marker detection, IEEE Transactions on Medical Imaging (2003)C
[20]
Dehmeshki J., Barker G. J., Tofts P. S., Classification of disease subgroup and correlation with disease
severity using magnetic resonance imaging whole-brain histograms: application to magnetization
transfer ratios and multiple sclerosis, Medical Imaging, IEEE Transactions, Volume 21, Issue 4, April
2002 Page(s):320 - 331
114
[21]
Dey D., Gobbi D. G., Slomka P. J., Surry K. J. M., Peters T. M., Automatic fusion of freehand
endoscopic brain images to three-dimensional surfaces: creating stereoscopic panoramas, Medical
Imaging, IEEE Transactions, Volume 21, Issue 1, Jan. 2002 Page(s):23 - 30
[22]
Diener H. C., Forsting M., Udar mózgu. Podręczny atlas, Wydawnictwo Medyczne, Wrocław 2004
[23]
Duvernoy H. M., Bourgouin P., Vannson J. L., The Human Brain: Surface, Three- dimensional
Sectional Anatomy with MRI, and Blood Supply, Springer, 1999
[24]
Eastwood J. D. et al., CT Perfusion Scanning with Deconvolution Analysis: Pilot Study in Patients with
Acute Middle Cerebral Artery Stroke, Radiology 2002; 222:227-236
[25]
Eastwood J. D., Lev M. H., Wintermark M., Fitzek C., Barboriak D. P., Delong D. M., Lee T. Y.,
Azhari T., Herzau M., Chilukuri V. R., Provenzale J. M., Correlation of early dynamic CT perfusion
imaging with whole-brain MR diffusion and perfusion imaging in acute hemispheric stroke, AJNR 24
(2003) 1869-1875.
[26]
Fitzpatrick J. M., Hill D. L. G., Maurer C. R., Image Registration, Handbook of Medical Imaging
chapter 17. Pages 447 - 513, SPIE. 2000.
[27]
Gramkow C., Bro-Nielsen M., Comparison of three filters in the solution of the Navier-Stokes equation
in registration, Proc. Scandinavian Conference on Image Analysis (SCIA'97), 1997
[28]
Guorong W., Feihu Q., Dinggang S., Learning-based deformable registration of MR brain images,
Medical Imaging, IEEE Transactions on Volume 25, Issue 9, Sept. 2006 Page(s):1145 - 115
[29]
Hachaj T., An algorithm for detecting lesions in CBF and CBV perfusion maps, Bio-Algorithms and
Med-Systems, t. 7, 2008, pp. 35 - 41
[30]
Hachaj T., Komputerowe generowanie dynamicznych map perfuzji mózgu, ich analiza i znaczenie w
neuroradiologii, Elektrotechnika i Elektronika, t. 27, z.1, 2008, pp. 26 - 36
[31]
Hachaj T., The registration and atlas construction of noisy brain computer tomography images based on
free form deformation technique, Bio-Algorithms and Med-Systems, t. 7, 2008
[32]
Hachaj T., The unified algorithm for detection potential lesions in dynamic perfusion maps CBF, CBV
and TTP, Journal of MIT, 2008, pp. 117 - 122
[33]
Hachaj T., Artificial intelligence methods for understanding dynamic computer tomography perfusion
maps, in : CISIS 2010 : The Fourth International Conference on Complex, Intelligent and Software
Intensive Systems, Krakow, Poland 15-18 February 2010 / ed. by Leonard Barolli, The Institute of
Electrical and Electronics Engineers, 2010, pp. 866-871
[34]
Hachaj T., Automatyczna detekcja elementów asymetrii w dynamicznych mapach CBF perfuzji
mózgowej, Elektrotechnika i Elektronika , praca przyjęta w druku
[35]
Hachaj T., Ogiela M. R., Automatic detection and lesion description in cerebral blood flow and cerebral
blood volume perfusion maps, Journal of Signal Processing Systems for Signal, Image, and Video
Technology, 2010, DOI: 10.1007/s11265-010-0454-0
[36]
Hachaj T., Ogiela M. R., Computer - assisted diagnosis system for detection, measure and description of
dynamic computer tomography perfusion maps, in Ryszard S. Choraś, Antoni Zabłudowski (eds),
Image Processing and Communication Challenges, Academy Publishing House EXIT, Warsaw 2009,
pp. 350-357
[37]
Hachaj T., Ogiela M. R., Validation of image registration algorithms for a brain perfusion CAD system,
Recent Developments in Artificial Intelligence Methods, T. Burczyński, W. Cholewa, W. Moczulski,
AI-METH Series, Gliwice, 2009, pp. 121-128
[38]
Hirata M., Sugawara Y., Murase, Miki H., Mochizuki T., Evaluation of Optimal Scan Duration and End
Time in Cerebral CT Perfusion Study, Radiation Medicine: Vol. 23 No. 5, 351-363 p.p, 2005
[39]
Hoeffner E. G., Case I., Jain R., Gujar S. K., Shah G. V., Deveikis J. P., Carlos R. C., Thompson B. G.,
Harrigan M. R., Mukherji S. K., Cerebral perfusion CT: technique and clinical applications, Radiology
231 (2004) 632- 644.
[40]
Hongliang Y., Automatic Rigid and Deformable Medical Image Registration, A Dissertation Submitted
to the Faculty of the Worcester Polytechnic Institute in Mechanical Engineering, May 2005
[41]
Horn B. K. P., Schunck, B. G, Determining optical flow. Artificial Intelligence, 17:185-203 (1981).
115
[42]
Ino F., Ooyama K., Hagihara K., A data distributed parallel algorithm for nonrigid image registration,
Parallel Computing, 2005
[43]
J. Cała, Ł. Czekierda, Teleconsultations - Synergy of Medicine and IT Technology TASK Quarterly,
Scientific Bulletin of Academic Computer Centre in Gdansk, October 2004, vol. 8, no. 4, TASK
Publishing, pp. 471-486. ACC Gdansk 2004.
[44]
Jagiełło T., Diagnostyka ultrasonograficzna tętnic domózgowych, Postępy neuroradiologii, Oświata
UN-O, Warszawa 2007
[45]
K. Zieliński, J. Cała, Ł. Czekierda, Migration Aspects of Telemedical Software Architectures 2nd
International Conference on e-Health in Common Europe, Kraków 11-12/03/2004 also in
Transformation of Healthcare with Information Technologies. Technology and Informatics vol. 105,
IOS Press 2004 pp. 80--91.
[46]
Kakimoto M., Morita C., Tsukimoto H., Data Mining from Functional Brain Images, Proceedings of the
International Workshop on Multimedia Data Mining (MDM/KDD'2000), in conjunction with ACM
SIGKDD conference. Boston, USA, August 20, 2000
[47]
Kang Y., Engelke K., Kalender W. A., A new accurate and precise 3-D segmentation method for
skeletal structures in volumetric CT data, Medical Imaging, IEEE Transactions on Volume 22, Issue 5,
May 2003 Page(s):586 - 598
[48]
Kety, S. S., Schmidt C. F., The determination of cerebral blood flow in man by the use of nitrous oxide
in low concentrations, Am. J. Physiol. 143, 53-66, 1945
[49]
Koenig M., Klotz E., Heuser L., Perfusion CT in acute stroke: characterization of cerebral ischemia
using parameter images of cerebral blood flow and their therapeutic relevance. Clinical experiences.,
Electromedica 1998;66:61-67
[50]
Koenig M., Kraus M., Theek C., Klotz E., Gehlen W., Heuser L., Quantitative assessment of the
ischemic brain by means of perfusion-related parameters derived from perfusion CT, Stroke 32 (2001)
431- 437.
[51]
Koh T. S., Hou Z., A numerical method for estimating blood flow by dynamic functional imaging,
Medical Engineering & Physics 24 (2002) 151-158
[52]
Koh T.S., Tan C. K. M., Cheong L.H. D., Limc C.C. T., Cerebral perfusion mapping using a robust and
efficient method for deconvolution analysis of dynamic contrast-enhanced images, NeuroImage 32
(2006) 643 - 653
[53]
Królicki L., Ćwikła J., Małkowski B., PET i SPECT w diagnostyce OUN, Oświata UN-O, Warszawa
2007
[54]
Kudo K., Perfusion Mismatch Analyzer (PMA), Acute Stroke Imaging Standardization Group,
Dostępny w Internecie: http://asist.umin.jp
[55]
Lagarias J. C., Reeds J. A., Wright M. H., Wright P. E., Convergence properties of the Nelder - Mead
simplex method in low dimensions , SIAM Journal of Optimization, Vol. 9, No. 1, pp. 112 - 147, 1997
[56]
Laliberté J. F., Meunier J., Mignotte M., Soucy J. P., Detection of abnormal diffuse perfusion in SPECT
using a normal brain atlas, NeuroImage, 23(2):561-8, October 2004
[57]
Lancaster J.L., Rainey L.H., Summerlin J.L., Freitas C.S., Fox P.T., Evans A.C., Toga A.W., Mazziotta
J.C., Automated labeling of the human brain: A preliminary report on the development and evaluation
of a forward-transform method. Hum Brain Mapp 5, 238-242, 1997.
[58]
Lancaster J.L., Woldorff M.G., Parsons L.M., Liotti M., Freitas C.S., Rainey L., Kochunov P.V.,
Nickerson D., Mikiten S.A., Fox P.T., Automated Talairach Atlas labels for functional brain mapping.
Human Brain Mapping 10:120-131, 2000.
[59]
Latchaw R. E., Yonas H., Hunter G. J., Yuh W. T. C., Ueda T., Sorensen A. G., Sunshine J. L., Biller J.,
Wechsler L., Higashida R., Hademenos G., Guidelines and recommendations for perfusion imaging in
cerebral ischemia, Stroke 34, (2003) 1084- 1104.
[60]
Latchaw R. E., Yonas H., Pentheny S. L., Gur D., Adverse reactions to xenon-enhanced CT cerebral
blood flow determination, Radiology 1987;163:251-254
116
[61]
Lee T. Y., Functional CT: physiological moels, Trends in Biotechnology Vol. 20 No. 8 (Suppl.), 2002
A TRENDS Guide to Imaging Technologies
[62]
Leenders K. L., Perani D., Lammertsma A. A., Heather J. D., Buckingham P., Jones T., Healy M. J. R.,
Gibbs J. M., Wise R. J. S., Hatazwa J., Herold S., Beaney R. P., Brooks D. J., Spinks T., Rhodes C.,
Frackowiak R. S. J., Cerebral blood flow, blood volume, and oxygen utilization: normal values and
effect of age, Brain 1990; 113:27-47.
[63]
Lev M. H et al, Utility of perfusion-weighted CT imaging in acute middle cerebral artery stroke treated
with intra-arterial thrombolysis: prediction of final infarct volume and clinical outcome, Stroke 32
(2001), 2021- 2028.
[64]
Lia X. F., Tiana J., Lia E. Z., Wanga X. X., Daib J. P., Aib L., Adaptive total linear least square method
for quantification of mean transit time in brain perfusion MRI, Medical Image Processing Group,
Institute of Automation, Chinese Academy of Sciences, Beijing, China, Department of Radiology, Tian
Tan Hospital, Beijing, China Received 27 September 2002; accepted 24 January 2003
[65]
Liu Y., Computational Symmetry, Symmetry 2000, Wenner-Gren International Series, vol 80 Part I, pp.
231-245. Portland Press, London. (ISBN I 85578 149 2).
[66]
Lüthi M., Albrecht T., Vetter T., A Curvature Sensitive Demon's Algorithm for Surface Registration,
2007
[67]
Malina W., Smiatacz M., Metody Cyfrowego przetwarzania obrazów, Akademicka oficyna wydawnicza
EXIT, Warszawa 2005
[68]
Modersitzki J., Numerical Methods for Image Registration (Numerical Mathematics and Scientific
Computation), Oxford University Press, USA, 2004
[69]
Nielsen, L.K., Elastic Registration of Medical MR Images, Cand. Scient. Thesis in Computational
Science.
Retrieved
April
17,
2007,
from
Matematisk
Institute
website:
http://www.mi.uib.no/~tai/thesis/nielsen.pdf
[70]
Norman D., Axel L., Berninger W. H., Edwards M. S., Cann H. E., Redington R. W., Lauranne Cox,
Dynamic Computed Tomography of the Brain: Techniques, Data Analysis, and Applications, AJR
136:759-770, April 1981
[71]
Nowinski W. L. et al., Analysis of Ischemic Stroke MR Images by Means of Brain Atlases of Anatomy
and Blood Supply Territories, Acad Radiol 2006; 13:1025-1034
[72]
Nowinski W. L. et al., Fast talairach transformation for magnetic resonance neuroimages, Journal of
computer assisted tomography, 2006, vol. 30
[73]
Ogiela M. R., Strukturalne metody rozpoznawania obrazów w kognitywnej analizie zobrazowań
medycznych, UWND AGH, Kraków 2004
[74]
Ogiela M. R., Tadeusiewicz R., Modern Computational Intelligence Methods for the Interpretation of
Medical Images, Studies in Computational Intelligence, Vol. 84, Springer 2008
[75]
Ogiela M. R., Tadeusiewicz R., Nowe klasy inteligentnych systemów interpretacji danych obrazowych.
Systemy UBIAS, PAK-Pomiary, Automatyka, Kontrola, Vol. 56, No 2, 2010, pp. 193-196.
[76]
Ogiela M. R., Tadeusiewicz R., Towards New Classes of Cognitive Vision Systems, CISIS 2010 : The
Fourth International Conference on Complex, Intelligent and Software Intensive Systems, Krakow,
Poland 15-18 February 2010 / ed. by Leonard Barolli [et al.], pp. 851 - 855, The Institute of Electrical
and Electronics Engineers, 2010
[77]
Oppenheim A. V., Signals and Systems, Prentice Hall, 1996
[78]
Phillips P.J., Vardi Y., Dunn, S.M., Buchsbaum, M.S., Spiegel-Cohen, J.L., An automatic MR-PET
registration algorithm, Pattern Recognition, 1996., Proceedings of the 13th International Conference on
Volume 3, 25-29 Aug. 1996 Page(s):533 - 537 vol.3
[79]
Press W. H., Flannery B. P., Teukolsky S. A., Vetterling W. T., Downhill Simplex Method in
Multidimensions, Numerical Recipes in C, Second Edition (1992), p. 408 - 412
[80]
Press W. H., Teukolsky S. A., Vetterling W. T., Flannery B. P, Numerical recipes in C. The art of
scientific computing. 2nd ed., Oxford: Cambridge University Press; 1992.
117
[81]
Prima S., Ourselin S., Ayache N., Computation of the Mid-Sagittal Plane In 3-D Brain Images, The
review of a journal in IEEE transaction on medical imaging, vol. 21, no.2, february 2002
[82]
Purwar A., Gupta R., Sarma M. K., Bayu G., Singh A., Rathore D. K., Saksena S., Trivedi R., Mishra
A., Haris M., Mohan P., Rathore R., De-scalping of the brain in echo planar DT-MRI, Proceedings of
International Society of Magnetic Resonance in Medicine 14, 2006
[83]
Rafael C. González, Woods R. E., Digital Image Processing, 3rd edition, Pearson Education, Inc, 2008
[84]
Ramirez L., Durdle N. G. , Raso V. J., Medical image registration in computational intelligence
framework: a review, Electrical and Computer Engineering, 2003. IEEE CCECE 2003. Canadian
Conference on Volume 2, 4-7 May 2003 Page(s):1021 - 1024 vol.2
[85]
Roche A., Guimond A., Ayache N., Meunier J., Multimodal Elastic Matching of Brain Images, 2000
Springer Verlag. Proceedings ECCV'00, volume 1843 of LNCS, 2000
[86]
Romanowski C., Furmanek M., Sklinda K., Zawadzki M., Adamczyk M., Fizyczne podstawy
tomografii komputerowej i rezonansu magnetycznego - zagadnienia wybrane. Środki kontrastowe,
Postępy neuroradiologii, Warszawa 2007, 12-53
[87]
Evelyn Rosta, Ralf Geske, Michael Baake, Signal analysis of impulse response functions in MR and CT
measurements of cerebral blood flow, Journal of Theoretical Biology 240 (2006) 451-458
[88]
Rueckert D., Sonoda L. I., Hayes C., Hill D. L. G., Leach M. O., Hawkes D. J., Nonrigid Registration
Using Free-Form Deformations: Application to Breast MR Images, IEEE Transaction on Medical
Imaging, Vol. 18, No. 8, August 1999
[89]
Sasaki M. et al., Procedure Guidelines for CT/MR Perfusion Imaging 2006, Joint Committee for the
Procedure
Guidelines
for
CT/MR
Perfusion
Imaging,
http://mrproj2.umin.jp/data/guidelineCtpMrp2006-e.pdf
[90]
Sasaki M., Kudo K., Oikawa H., CT perfusion for acute stroke: Current concepts on technical aspects
and clinical applications, International Congress Series 1290 (2006) 30-36
[91]
Semmlow J. L., Biosignal and Biomedical Image Processing. MATLAB - Based Applications , CRC
Press 2004
[92]
Sędziwy A., Automatyczne wykrywanie i analiza zmian patologicznych w obrazach MR i CT struktur
mózgowych, rozprawa doktorska, Kraków 2003
[93]
Smith S. M., Zhang Y., Jenkinson M., Chen J., Matthews P. M., Federico A., De Stefano N., Brain
Atrophy Analysis Using Single- and Multiple-Time-Point Data, FMRIB Technical Report TR01SMS1,
(A related paper has been accepted for publication in NeuroImage)
[94]
Statistic for Windows 5.1 - Glosariusz, StatSoft Inc. 1996
[95]
Tadeusiewicz R., Ogiela M. R., Medical Image Understanding Technology, Springer Verlag, BerlinHeidelberg, 2004.
[96]
Talairach J., Tournoux P., Co-Planar Stereotaxic Atlas of the Human Brain, New York: Thieme
Medical Publishers, Inc (1988).
[97]
Tang S., Jiang T., Fast Nonrigid Medical image registration by fluid model, 6th Asian Conference on
Computer Vision, 2004
[98]
Thirion J. P., Image matching as a diffusion process: an analogy with Maxwell's Demons, Medical
Image Analysis, Vol. 2, No. 3. (September 1998), pp. 243-260.
[99]
Thompson P., Mega M., Narr K., Sowell E., Blanton R., Toga A., Brain image analysis and atlas
construction, Handbook of Medical Imaging chapter 17. Pages 1066 - 1119, SPIE. 2000.
[100]
van Vliet L. J., Young I. T., Verbeek P. W., Recursive Gaussian Derivative Filters, IEEE Computer
Society Press (Australia), Vol. I, pp. 509-514
[101]
Walecki J., Bulski T., Sklinda K., Choroby naczyniopochodne ośrodkowego układu nerwowego,
Postępy neuroradiologii, Warszawa 2007, 472 - 512
[102]
Walecki J., Romanowski C., Guzy wewnątrzczaszkowe, Postępy neuroradiologii, Warszawa 2007, 271
- 318
118
[103]
Walecki J., Tarasów T., Podstawy fizyczne rezonansu magnetycznego, Biocybernetyk i inŜynieria
biomedyczna , Tom 9. Fizyka medyczna, Exit 2002
[104]
Wang H. et al., Validation of an accelerated 'demons' algorithm for deformable image registration in
radiation therapy, Physics in Medicine and Biology, Volume 50, Number 12
[105]
Warfield S.K. et al, Advanced Nonrigid Registration Algorithms for Image Fusion, Academic Press,
Jun 2002
[106]
Wintermark M., et. al., Comparative Overview of Brain Perfusion Imaging Techniques, Stroke.
2005;36:e83,
[107]
Wintermarka M., Thirana J. P., Maedera P., Schnydera P., Meuli R., Simultaneous Measurement of
Regional Cerebral Blood Flow by Perfusion CT and Stable Xenon CT: A Validation Study, American
Journal of Neuroradiology 22:905-914 (5 2001)
[108]
Wirestam R., Ryding E., Lindgren A., Geijer B., Holt?s S., St?hlberg F., Absolute cerebral blood flow
measured by dynamic susceptibility contrast MRI: a direct comparison with Xe-133 SPECT, Magnetic
Resonance Materials in Physics, Biology and Medicine 11 (2000) 96-103
[109]
Wittsack H. J., Wohlschläger A. M., Ritzl E. K., Kleiser R., Cohnena M., Seitz R. J., Mödder U., CTperfusion imaging of the human brain: Advanced deconvolution analysis using circulant singular value
decomposition, Computerized Medical Imaging and Graphics 32 (2008) 67-77
[110]
Xu C., Pham D. L., Rettmann M. E., Yu D. N., Prince J. L., Medical Imaging, Reconstruction of the
human cerebral cortex from magnetic resonance images, IEEE Transactions, Volume 18, Issue 6, June
1999 Page(s):467 - 480
[111]
Yamada K., Wu O., Gonzalez R. G., Bakker D., ?stergaard L., Copen W. A., Weisskoff R. M., Rosen
B. R., Yagi K., Nishimura T., Sorensen A. G., Magnetic Resonance Perfusion-Weighted Imaging of
Acute Cerebral Infarction. Effect of the Calculation Methods and Underlying Vasculopathy, Stroke.
2002;33:87-94.
[112]
Young I.T., van Vliet L.J., Recursive implementation of the Gaussian filter, Signal Processing, vol. 44,
no. 2, 1995, 139-151. He Wang et al 2005 Phys. Med. Biol. 50 2887-2905
[113]
Zieliński R., Tablice Statystyczne -, Państwowe Wydawnictwo Naukowe 1972
[114]
Zieliński T. P., Od teorii do cyfrowego przetwarzania sygnałów, Uczelniane Wydawnictwa NaukowoDydaktyczne Akademii Górniczo-Hutniczej, rok wydania: 2002, numer wydania: 1, ISBN: 83-8830955-2.
[115]
Zierler K. L., Equations for measuring blood flow by external monitoring of radioisotopes, Circ Res
1965;16:309-21.
[116]
DICOM, strategic dokument Version 9.5 March 30, 2009, http://dicom.nema.org
[117]
Strona domowa projektu Talairach http://www.talairach.org
[118]
Strona domowa biblioteki DICOM# http://sourceforge.net/projects/dicom-cs/
[119]
Strona domowa biblioteki Alglib NET http://www.alglib.net/
[120]
Manual pakietu aplikacji Siemens AG, Siemens AG, Clinical Applications. Application Guide.
Software Version syngo CT 2007A, Siemns Medical, 06/2006
119
Dodatek A - Implementacja systemu DMD
W celu osiągnięcia postawionych celów naukowych oraz realizacji poszczególnych
etapów badawczych został utworzony program realizujący opisane w pracy metody
rozpoznawania i interpretacji obrazów. Pierwsza wersja programu została napisana w
środowisku Matlab 6.5.1 z wykorzystaniem pakietów Image Processing Toolbox (algorytmy
do wczytywanie oraz przetwarzania obrazów) oraz Optimization Toolbox (zawierającej
między innymi implementację metody simplexów Neldera–Meada). PoniewaŜ w programie
zaimplementowano algorytm dopasowania obrazu przy uŜyciu transformaty afinicznej oraz
metody Thiriona, program wykorzystany został do przeprowadzenia części obliczeń
opisanych w paragrafie 5.3. Rozwiązanie to nie posiadało interfejsu graficznego.
Kolejna wersja programu była kompletną implementacją systemu DMD opisanego w
rozdziale 7 tej pracy. W programie tym wykonano wszystkie pozostałe obliczenia, których
wyniki zaprezentowano w tej dysertacji. Aplikacja z rozbudowanym interfejsem uŜytkownika
została sporządzona w języku C# w środowisku Microsoft Visual Studio 2005. Program
wykorzystuje bibliotekę Alglib NET [119] zawierającą implementację popularnych metod
numerycznych oraz DICOM# [118], którą umoŜliwia między innymi parsowanie plików
DICOM. Wszystkie pozostałe moduły zostały sporządzone przez autora.
W celu uruchomienia programu naleŜy dysponować systemem operacyjnym z
zainstalowaną maszyną wirtualną .NET (Framework v2.0.50727 lub nowszy).
Rysunek A.1 przedstawia główne okno aplikacji z wczytanymi przykładowymi
danymi. W skład okna wchodzi menu główne (rysunek A.1 A), pasek narzędzi (rysunek A.1
B), okno zakładek (rysunek A.1 C) oraz pasek stanu (rysunek A.1 D).
120
Rysunek A.1 Główne okno programu (pierwsza zakładka) opis w tekście.
Z poziomu głównego menu moŜliwa jest konfiguracja parametrów algorytmu
wykrywania asymetrii, dopasowania obrazów oraz korekcji gamma monochromatycznych
obrazów TK wyświetlanych w oknie zakładek.
Pasek narzędzi zawiera trzy przyciski, które uruchamiają najwaŜniejsze algorytmy:
-
Wykrywanie osi symetrii – „detect symmetry axis” (uruchamia algorytm opisany w
paragrafie 3.1);
-
Wykrywanie regionów asymetrii - „detect asymmetry regions” (uruchamia algorytm
opisany w paragrafie 3.2);
-
Sporządzenie opisu wykrytych asymetrii przy pomocy atlasu mózgu – „perform image
registration” (dopasowanie metodą FFD).
Wybranie
wyŜej wymienionych operacji
powoduje przeprowadzenie kolejnych
etapów procesu komputerowej interpretacji semantycznej, tak jak zostało to omówione w
rozdziale 7 rozprawy.
Okno zakładek zawiera cztery zakładki. Pierwsza z zakładek podzielona jest na cztery
mniejsze okna (po jednym dla mapy CBF, CBV, zobrazowania TK oraz zobrazowania TK
atlasu – ruchomego obrazu w procesie dopasowania). KaŜde z okien:
121
-
Wyświetla odpowiednie zobrazowanie;
-
UmoŜliwia wczytanie zobrazowania zapisanego w formacie DICOM (context menu),
-
Wyświetlenie wszystkich informacji zawartych w etykietach formatu DICOM;
-
Dwukrotne kliknięcie na okno włącza podgląd pełnoekranowy wybranego
zobrazowania;
-
W oknach moŜna manualnie korygować oś symetrii mózgowia pacjenta;
-
Po zaznaczeniu
wskaźnikiem myszki
dowolnego piksela zobrazowania zostaje
wyświetlona informacja o wartości perfuzji w wybranym punkcie w przypadku map
perfuzji/gęstości tkanki w skali Hounsfielda w przypadku TK (tooltip);
-
Po uruchomieniu algorytmu detekcji asymetrii, obszary z podejrzeniem zmian
chorobowych zostają zaznaczone białym kolorem (rysunek A.2), po wskazaniu
wskaźnikiem myszki obszaru asymetrii, zostają wyświetlone szczegółowe informacje
o wybranym ROI (rysunek A.3). Są to te same informacje, które moŜna znaleźć w
zakładce „Lesion detecion” opisanej w dalszej części rozdziału.
Rysunek A.2 Mapy (A) - CBF i (B) - CBV z wykrytymi regionami asymetrii.
Rysunek A.3 Mapy CBF i CBV z wykrytymi regionami asymetrii. Po najechaniu wskaźnikiem myszki na obszar
asymetrii zostają wyświetlone szczegółowe informacje o wybranym ROI w postaci tooltipu.
122
Druga zakładka przedstawia graficzne informacje związane z procesem dopasowania
obrazów:
-
Obraz, który chcemy opisać przy pomocy atlasu (obraz statyczny) rysunek A.4 A;
-
Wzorcowy obraz mózgu (obraz ruchomy) rysunek A.4 B;
-
Etykiety wzorcowego obrazu mózgu rysunek A.4 C;
-
Siatkę węzłów interpolacyjnych po dokonaniu procesu dopasowania obrazów rysunek
A.4 D;
-
Dopasowany obraz ruchomy rysunek A.4 E;
-
Dopasowane etykiety wzorcowego obrazu mózgu rysunek A.4 F;
-
Statyczny obraz TK nałoŜony na ruchomy obraz TK przed zastosowaniem algorytmu
dopasowania rysunek A.4 G;
-
Statyczny obraz TK nałoŜony na ruchomy obraz TK po zastosowaniu algorytmu
dopasowania rysunek A.4 H;
-
Statyczny obraz TK nałoŜony na ruchomy obraz TK po zastosowaniu algorytmu
dopasowania (tak zwany checkerboard test [42]) rysunek A.4 I.
Rysunek A.4 Zakładka „Image registration”, opis w tekście.
Trzecia z zakładek zawiera wizualizację (rysunek A.5 A) oraz opis (rysunek A.5 B)
wykrytych zmian chorobowych. Potencjalne obszary objęte zmianami chorobowymi wykryte
na zobrazowaniach perfuzyjnych nałoŜone są na zobrazowanie TK. Czerwony obszar
oznacza tkanki, które zostaną uszkodzone, niebieski – tkanki, w których zostały uruchomione
123
mechanizmy autoregulacji perfuzji, zielony - tkanki, które mogą przetrwać nieuszkodzone
stan niedokrwienny. W opisie zawarte są parametry poszczególnych obszarów asymetrii (typ
zmiany chorobowej, nazwy obszarów mózgu, - odczytane z atlasu – w których występują
zmiany, wartości perfuzji oraz perfuzji względnej w ROI, powierzchnia obszaru asymetrii).
Rysunek A.5 Zakładka „Lesion detection”, opis w tekście.
Ostatnią zakładką jest okno wyświetlające szczegóły działania poszczególnych
algorytmów (debug log) – rysunek A.6. Wyświetlane są tam między innymi współczynniki
osi symetrii mózgowia, wartości funkcji błędu w poszczególnych krokach algorytmu
dopasowania obrazu oraz inne informacje, które nie są bezpośrednio wykorzystywane w
procesie diagnozowania zobrazowań.
124
Rysunek A.6 Zakładka „Debug log”, opis w tekście.
Pasek stanu (rysunek A.1 D) moŜe zawierać komunikat „ready”, oznaczający, Ŝe
program nie wykonuje w tej chwili Ŝadnych obliczeń lub „performing image registration”
wraz z paskiem postępu, informujący o przeprowadzaniu procesu dopasowania obrazów.
Działanie algorytmu detekcji potencjalnych asymetrii moŜe być modyfikowane przy
uŜyciu dwóch parametrów adaptacyjnych (rysunek A.7): minimalnej wartości określającej
akceptowalną wielkości zaburzenia (minimal lesion size factor), opisanego w paragrafie 3.2 w
podpunkcie (i) algorytmu, oraz wielkości okna dla filtru medianowego (paragraf 3.2,
podpunkt (e)).
Rysunek A.7 Okno z parametrami algorytmu wykrywania asymetrii.
Dla algorytmu dopasowania obrazów FFD moŜliwe jest ustawienie następujących
parametrów (rysunek A.8): początkowej gęstości siatki węzłów interpolacyjnych (initial grid
size), liczby iteracji (iterations count), liczby zagęszczeń siatki (grid refinements count) oraz
125
dodatkowej rotacji i skalowania dokonywanego przed uruchomieniem algorytmu FFD (affine
pre – registration step). Pozostałe parametry (model dopasowania oraz funkcja błędu) nie
mogą być modyfikowane. Znaczenie poszczególnych parametrów zostało opisane w
paragrafie 4.2 oraz 5.3.
Rysunek A.8 Okno z parametrami algorytmu dopasowania obrazów.
Program umoŜliwia równieŜ zastosowanie korekcji gamma [83] (rysunek A.9) dla
monochromatycznych obrazów TK wyświetlanych w oknie zakładek. Funkcjonalność ta ma
na celu poprawienie komfortu pracy z aplikacją, nie ma natomiast wpływu na działanie
poszczególnych algorytmów.
Rysunek A.9 Zastosowanie korekcji
γ
dla przykładowego zobrazowania TK. (A)
γ = 0.75 , (D) γ = 0.50 , (E) γ = 0.25 .
126
γ = 1.25 , (B) γ = 1.0 , (C)