Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Linearyzacja
Modele liniowe powstają też w wyniku linearyzacji nieliniowych modeli
przestrzeni stanu w otoczeniu tzw. trajektorii nominalnej
Weźmy nieliniowy niestacjonarny model przestrzeni stanu
x t f x t , ut ,t , x t0 x0
- równanie stanu
y t h x t , ut ,t
- równanie wyjścia
gdzie
x n
- stan
u m
- wejście
y p
- wyjście
Kazimierz Duzinkiewicz, dr hab. inż.
f ,,, h,, - funkcje różniczkowalne w
sposób ciągły względem
swoich argumentów
Katedra Inżynierii Systemów Sterowania
1
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Trajektorię nominalną określa się w następujący sposób:
~t ,
Definicja trajektorii nominalnej: Dla nominalnego sygnału wejścia u
x t , spełnia równanie stanu
nominalna trajektoria stanu ~
~
~t ,t , ~
x t f ~
x t , u
x t0 ~
x0
i nominalna trajektoria wyjścia spełnia równanie wyjścia
~
~t ,t
y t h~
x t ,u
Jeżeli nominalna trajektoria wejścia jest stała
~t u
~ const
u
trajektoria stanu jest stanem równowagi ~
x , który spełnia równanie
~t ,t
0 f ~
x t , u
dla wszystkich t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
2
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Odchylenia stanu ( w tym stanu początkowego), wejścia i wyjścia od
ich trajektorii nominalnych oznaczymy
x t ~
x t x t
x t x t ~
x t
~ t
u t ut u
~ t u t
ut u
y t y t ~y t
y t ~y t y t
x0 x 0 ~
x0
x0 ~
x0 x0
Korzystając z powyższych oznaczeń – równanie stanu
~t u t ,t
x t ~
x t x t f ~
x t x t , u
Rozwijamy funkcję f
w szereg Taylor’a w otoczeniu wartości
nominalnych
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
3
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
~ t ,t f ~
~ t ,t x t ~
x t ~
x t x t f ~
x t , u
x t , u
x t
x
f ~ ~
x t , u t ,t ut u~ t R
u
Z definicji trajektorii nominalnej stanu
~
~ t ,t
x t f ~
x t , u
i zakładając, że warunki zaniedbania reszty z wyrazów wyższych
rzędów są spełnione
x t
f ~ ~
x t , u t ,t x t
x
f ~ ~
x t , u t ,t u t
u
Zlinearyzowane równanie stanu
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
4
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
f i ~ ~
f ~ ~
x t , u t ,t x t , u t ,t n n
x
x j
f 1 ~ ~
x x t , u t ,t
1
~ t ,t
f 2 ~
x t , u
x1
f
~ t ,t
x t , u
n ~
x1
f 1
x2
f 2
x2
~x t , u~ t ,t
~x t , u~ t ,t
f n ~ ~
x t , u t ,t
x2
f 1
xn
f 2
xn
f n
xn
~x t , u~ t ,t
~x t , u~ t ,t
~
~
x t , u t ,t
At
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
5
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
f i ~ ~
f ~ ~
x t , u t ,t x t , u t ,t n m
u
u j
f 1
f 1 ~ ~
x
t
,
u
t
,
t
u
u 2
1
~ t ,t f 2
f 2 ~
x t , u
u1
u 2
f
~ t ,t f n
x t , u
n ~
u 2
u1
~x t , u~ t ,t
~x t , u~ t ,t
~x t , u~ t ,t
f 1
u m
f 2
u m
f n
u m
~x t , u~ t ,t
~x t , u~ t ,t
~
~
x t , u t ,t
B t
x t At x t Bt u t
Zlinearyzowane równanie stanu
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
6
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Podobnie dla równania wyjścia
~t u t ,t
yt ~y t y t h ~
x t x t , u
Rozwijamy funkcję h w szereg Taylor’a w otoczeniu wartości
nominalnych
y t ~y t y t
~ t ,t h ~
~ t ,t x t ~
h ~
x t , u
x t , u
x t
x
Kazimierz Duzinkiewicz, dr hab. inż.
h ~ ~
x t , u t ,t ut u~ t R
u
Katedra Inżynierii Systemów Sterowania
7
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Z definicji trajektorii nominalnej wyjścia
~
~t ,t
y t h~
x t ,u
i zakładając, że warunki zaniedbania reszty z wyrazów wyższych
rzędów są spełnione
h ~ ~
x t , u t ,t x t
y t
x
h ~ ~
x t , u t ,t u t
u
Zlinearyzowane równanie wyjścia
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
8
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
hi ~ ~
h ~ ~
x t , u t ,t x t , u t ,t p n
x
x j
h1 ~ ~
x x t , u t ,t
1
~ t ,t
h2 ~
x t , u
x1
h
~ t ,t
p ~
x t , u
x1
h1
x2
h2
x2
~x t , u~ t ,t
~x t , u~ t ,t
h p ~ ~
x t , u t ,t
x2
h1 ~ ~
x t , u t ,t
xn
h2 ~ ~
x t , u t ,t
xn
h p ~ ~
x t , u t ,t
xn
C t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
9
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
hi ~ ~
h ~ ~
x t , u t ,t x t , u t ,t p m
u
u j
h1 ~ ~
u x t , u t ,t
1
~ t ,t
h2 ~
x t , u
u1
h
~ t ,t
p ~
x t , u
u1
h1
u2
h2
u2
~x t , u~ t ,t
~x t , u~ t ,t
h p ~ ~
x t , u t ,t
u2
h1
um
h2
um
h p
um
~x t , u~ t ,t
~x t , u~ t ,t
~
~
x t , u t ,t
Dt
y t C t x t Dt u t
Zlinearyzowane równanie wyjścia
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
10
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
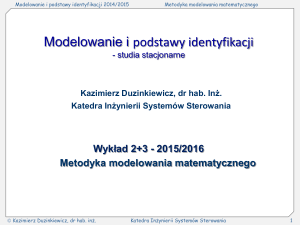
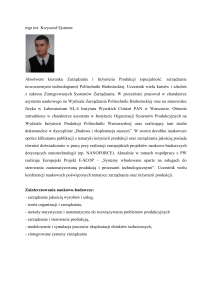
Przykład
Ruch kulki toczącej się w wyżłobionej belce
(patrz rysunek) opisywany jest równaniami
Jk
2
2 m pt mg sin t mpt t 0
r
mpt J J t 2mpt p t t mgpt cos t t
2
k
Zmienne
pt
t
t
- położenie kulki (wyjście)
- kąt pochylenia belki (wyjście)
- przyłożony moment obrotowy (wejście)
Parametry
g
- przyśpieszenie ziemskie
J
m
r
Jk
- moment bezwładności belki
- masa kulki
- promień kulki
- moment bezwładności kulki
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
11
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Definiujemy zmienne stanu
x1 t p t
Wejście
x2 t p t
ut t
Wyjście
x3 t t
yt pt
x4 t t
Równania stanu
x1 t
dpt
x2 t
dt
2
d 2 pt
mg sin t mpt t
m
t 2 g sin t
x2 t
p
t
dt 2
Jk
Jk
m
2
2 m
r
r
2
2
k pt t g sin t kx1 t x4 t kg sin x3 t
gdzie
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
k
m
Jk
2 m
r
12
Modelowanie i identyfikacja 2014/2015
x3 t
Technologie modelowania - linearyzacja
d t
x4 t
dt
d 2 t 2mpt p t t mgpt cos t t
x4 t
2
2
dt
mpt J J k
2mx1 t x2 t x4 t mgx1 t cos x3 t u t
2
mx1 t J J k
Równanie wyjścia
yt x1 t
Interesuje nas sterowanie w sytuacji: belka w położeniu ustalonym poziomym i kulka
poruszająca się ruchem jednostajnym. Przyjmując, że obserwację rozpoczynamy w
chwili t0, położenie początkowe wynosi p0, zaś prędkość ruchu jednostajnego v0,
możemy napisać
~
x1 t ~
p t v0 t t0 p0
~
x2 t ~
p t v0
~
~
x3 t t 0
~
~
x4 t t 0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
13
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Podstawmy te ustalenia do równań stanu
x1 t x2 t
~
x1 t ~
p t v0 t t0 p0
2
x 2 t kx1 t x4 t kg sin x3 t
~
x2 t ~
p t v0
x3 t x4 t
~
~
x3 t t 0
x4 t
~
~
x4 t t 0
2 mx1 t x2 t x4 t mgx1 t cos x3 t u t
2
mx1 t J J k
~
x1 t v0
~
x1 t v0
~
x 2 t 0
~
x2 t k v0 t t0 p0 0 kg sin 0 0
~
x3 t 0
~
x3 t 0
~
x4 t 0
~
~
x t 2mv0 t t0 p0 v0 0 mg v0 t t0 p0 cos 0 u t
4
2
mv0 t t0 p0 J J k
mg v0 t t0 p0 u~ t
2
mv0 t t0 p0 J J k
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
14
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Dla przyjętej trajektorii stanu, aby spełniała ona wymagania definicji trajektorii
nominalnej
~
~
x t mgv0 t t0 p0 u t 0
4
2
mv0 t t0 p0 J J k
czyli
mgv0 t t0 p0 u~t 0
u~ t mgv0 t t0 p0 mg~
x1 t
Podsumowanie:
Nominalna trajektoria wejścia
u~t ~t mg~
x1 t
Nominalna trajektoria stanu
~
x1 t ~
p t v0 t t0 p0
~
x2 t ~
p t v0
~
~
x3 t t 0
~
~
x4 t t 0
Nominalna trajektoria wyjścia
~
y t ~
p t ~
x1 t v0 t t0 p0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
15
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Definiujemy zmienne przyrostowe w otoczeniu trajektorii nominalnych
- wejścia
- stanu
u t ut u~ t t mg~
x1 t t mg~
p t
x1 t p t ~
p t p t ~
p t
x1 t ~
~
~
~
x t x2 t p t p t p t p t
x t 2
~
~
x3 t x3 t
t t
t
~
x t ~
x4 t t t t
4
- wyjścia
y t yt ~
y t x1 t ~
x1 t pt ~
p t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
16
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Funkcje f(x(t), u(t)) i h(x(t), u(t))
f x ,u
f 1 x ,u
f 2 x , u
f 3 x ,u
f 4 x ,u
x2 t
f 1 x1 , x2 , x3 , x4 ,u
2
kx1 t x4 t kg sin x3 t
f 2 x1 , x2 , x3 , x4 ,u
x4 t
f 3 x1 , x2 , x3 , x4 ,u
2 mx1 t x2 t x4 t mgx1 t cos x3 t u t
f 4 x1 , x2 , x3 , x4 ,u
2
mx
t
J Jk
1
h x ,u h1 x ,u h1 x1 , x2 , x3 , x4 ,u x1 t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
17
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Jakobiany
f i
f
x t ,u t x t ,u t 4 4
x
x j
f 1
x x t ,u t
1
f 2 x t ,u t
x
1
f
3 x t ,u t
x1
f 4
x x t ,u t
1
Kazimierz Duzinkiewicz, dr hab. inż.
f 1
x2
f 2
x2
f 3
x2
f 4
x2
x t ,u t
x t ,u t
x t ,u t
x t ,u t
f 1
x3
f 2
x3
f 3
x3
f 4
x3
x t ,u t
x t ,u t
x t ,u t
x t ,u t
Katedra Inżynierii Systemów Sterowania
f 1
x4
f 2
x4
f 3
x4
f 4
x4
x t ,u t
x t ,u t
x t ,u t
x t ,u t
18
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
x2
f 1 x1 , x2 , x3 , x4 ,u
2
kx1 x4 kg sin x3
f 2 x1 , x2 , x3 , x4 ,u
x4 t
f 3 x1 , x2 , x3 , x4 ,u
2mx1 x2 x4 mgx1 cos x3 u
f 4 x1 , x2 , x3 , x4 ,u
2
mx
1 J Jk
f 1
x ,u 0
x1
f 1
x ,u 1
x2
f 2
x ,u kx4 2
x1
f 2
x ,u 0
x2
f 2
x ,u kg cos x3
x3
f 2
x ,u 2kx1 x4
x4
f 3
x ,u 0
x1
f 3
x ,u 0
x2
f 3
x ,u 0
x3
f 3
x ,u 1
x4
f 1
x ,u 0
x4
f 1
x ,u 0
x3
f 4
x ,u 2mx2 x4 mg cos x3 mx1 J J2 k 2mx2 1 x2 x4 mgx1 cos x3 u 2mx1
x1
mx1 J J k
Kazimierz Duzinkiewicz, dr hab. inż.
2
Katedra Inżynierii Systemów Sterowania
19
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
x2
f 1 x1 , x2 , x3 , x4 ,u
2
kx1 x4 kg sin x3
f 2 x1 , x2 , x3 , x4 ,u
x4 t
f 3 x1 , x2 , x3 , x4 ,u
2mx1 x2 x4 mgx1 cos x3 u
f 4 x1 , x2 , x3 , x4 ,u
2
mx
1 J Jk
f 4
2mx1 x4
x ,u 2
x2
mx1 J J k
f 4
1 sin x3
x ,u mgx
2
x3
mx1 J J k
f 4
x ,u 22mx1 x2
x4
mx1 J J k
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
20
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
f
x t ,u t f i x t ,u t 4 1
u
u
x2
f 1 x1 , x2 , x3 , x4 ,u
2
kx1 x4 kg sin x3
f 2 x1 , x2 , x3 , x4 ,u
x4 t
f 3 x1 , x2 , x3 , x4 ,u
2mx1 x2 x4 mgx1 cos x3 u
f 4 x1 , x2 , x3 , x4 ,u
2
mx
J Jk
1
f 1
x ,u 0
u
f 2
x ,u 0
u
Kazimierz Duzinkiewicz, dr hab. inż.
f 3
x ,u 0
u
f 1
x
t
,
u
t
u
f
2
x t ,u t
u
f 3 x t ,u t
u
f
4
x t ,u t
u
f 4
x ,u 2 1
u
mx1 J J k
Katedra Inżynierii Systemów Sterowania
21
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
h
h
x t ,u t x t ,u t 1 4
x
x j
h
h
h
h
x t ,u t
x t ,u t
x t ,u t
x t ,u t
x2
x3
x4
x1
h
x t ,u t h x t ,u t 1 1
u
u
h
x t ,u t
u
h x ,u h1 x ,u h1 x1 , x2 , x3 , x4 ,u x1 t
h
x ,u 1
x1
h
x ,u 0
x2
h
x ,u 0
x3
h
x ,u 0
x4
h
x ,u 0
u
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
22
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Wartości jakobianów na trajektoriach nominalnych
f i ~ ~
f ~ ~
x t ,u t x t ,u t 4 4
At
x
x j
0
0
0
mg
~ 2
mp t J J k
f 1
x ,u 0
x1
f 2
x ,u kx4 2
x1
f 3
x ,u 0
x1
0
0 kg
0
0
0
0
f 1
x ,u 0 f1 x ,u 0
x3
x4
f 1
x ,u 1
x2
f 2
x ,u 0
x2
f 3
x ,u 0
x2
1
f 2
x ,u kg cos x3
x3
f 3
x ,u 0
x3
f 2
x ,u 2kx1 x4
x4
f 3
x ,u 1
x4
f 4
x ,u 2mx2 x4 mg cos x3 mx1 J J2 k 2mx2 1 x2 x4 mgx1 cos x3 u 2mx1
x1
mx1 J J k
f 4
x ,u 22mx1 x4
x2
mx1 J J k
2
f 4
1 sin x3
x ,u mgx
2
x3
mx1 J J k
Kazimierz Duzinkiewicz, dr hab. inż.
0
1
~
2mp t v0
2
m~
p t J J k
0
~
x1 t ~
p t v0 t t0 p0
~
x2 t ~
p t v0
~
~
x3 t t 0
~
~
x4 t t 0
u~t ~
pt mg~
x1 t
f 4
x ,u 22mx1 x2
x4
mx1 J J k
Katedra Inżynierii Systemów Sterowania
23
Modelowanie i identyfikacja 2014/2015
Bt
Technologie modelowania - linearyzacja
f ~ ~
x t ,u t f i ~x t ,u~ t 4 1
u
u
0
0
0
1
~ 2
m
p
t
J
J
k
f 1
x ,u 0
u
f 2
x ,u 0
u
f 3
x ,u 0
u
f 4
x ,u 2 1
u
mx1 J J k
~
x1 t ~
p t v0 t t0 p0
~
x2 t ~
p t v0
~
~
x3 t t 0
~
~
x4 t t 0
u~t ~
pt mg~
x1 t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
24
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
h ~ ~
h ~ ~
x t ,u t x t ,u t 1 4
C t
x
x j
1 0 0 0
h
h
h
h
x ,u 0 x x ,u 0
x ,u 0
x ,u 1
x3
x2
4
x1
Dt
h ~ ~
x t ,u t h ~x t ,u~ t 1 1
u
u
0
h
x ,u 0
u
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
25
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Model nieliniowy
x1 t x2 t
2
x 2 t kx1 t x4 t kg sin x3 t
x3 t x4 t
x4 t
2 mx1 t x2 t x4 t mgx1 t cos x3 t u t
2
mx1 t J J k
yt x1 t
Model zlinearyzowany w otoczeniu wybranej trajektorii nominalnej
x t At x t B t u t
0
0
0
mg
~ 2
mp t J J k
Kazimierz Duzinkiewicz, dr hab. inż.
1
0
0 kg
0
0
0
0
0
x t
1
0
0
x 2 t
u t
1
0
x
t
2m~
p t v0 3
1
2
2
p t J J k
m~
p t J J k x 4 t m~
0
Katedra Inżynierii Systemów Sterowania
26
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
y t C t x t Dt u t
x 1 t
x
t
1 0 0 0 2 0 u t
x t
3
x t
4
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
27
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Model szczególny trajektorii nominalnych – stała trajektoria wejścia, trajektoria
stanu = stan równowagi
v0 0 ~
p t p0
~
x1 t ~
p t p0
~
x2 t ~
p t 0
Sprawdzić czy jest to stan równowagi!
~
x3 t t 0
~
~
~
x4 t t 0
u~t ~t mg~
x1 t mgp0
0
0
At
0
mg
~ 2
mp t J J k
1
0
0 kg
0
0
0
0
Kazimierz Duzinkiewicz, dr hab. inż.
0
1
2m~
p t v0
2
m~
p t J J k
0
0
0
A
0
mg
2
mp0 J J k
Katedra Inżynierii Systemów Sterowania
0
0 kg 0
0
0
1
0
0
0
1
0
28
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
0
0
B
0
1
2
mp
J
J
k
0
0
0
B t
0
1
~ 2
mp t J J k
C t 1 0 0 0
C 1 0 0 0
Dt 0
D 0
Model zlinearyzowany w otoczeniu stanu równowagi
x t Ax t Bu t
0
0
0
mg
2
mp
0 J Jk
Kazimierz Duzinkiewicz, dr hab. inż.
0 x t
0
1
0 kg 0 x t
0
2
u t
0
0
1 x t
0
3
1
0
0
0 x t
2
4
mp
J
J
k
0
1
0
Katedra Inżynierii Systemów Sterowania
29
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
y t Cx t Du t
x 1 t
x
t
1 0 0 0 2 0 u t
x t
3
x t
4
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
30
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Podobnie można przedstawić linearyzację modeli wejście - wyjście
Weźmy nieliniowy niestacjonarny model wejście - wyjście
f y n , , y , um , , u,t 0
y 0 y0 , , y n 1 0 y0n 1
gdzie
u p - wejście
y - wyjście
q
Kazimierz Duzinkiewicz, dr hab. inż.
f ,, - funkcje różniczkowalne w
sposób ciągły względem
swoich argumentów
Katedra Inżynierii Systemów Sterowania
31
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Trajektorię nominalną określa się w analogiczny sposób:
~t ,
Definicja trajektorii nominalnej: Dla nominalnego sygnału wejścia u
nominalna trajektoria wyjścia ~
y t , modelu wejście - wyjście
spełnia równanie:
f ~y n , , ~y , u~ m , , u~ ,t 0
z warunkami początkowymi:
Kazimierz Duzinkiewicz, dr hab. inż.
~
y 0 ~
y0 , , ~
y n 1 0 ~
y0n 1
Katedra Inżynierii Systemów Sterowania
32
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Jeżeli nominalna trajektoria wejścia jest stała
~t u const
u
~
nominalna trajektoria wyjścia jest stała, y t y const , i spełnia
równanie
0 f y ,u ,t
dla wszystkich t
Z określenia trajektorii równowagi:
u u n y y m 0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
33
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Odchylenia wejścia i wyjścia (i ich warunków początkowych) od ich
trajektorii równowagi oznaczymy
ut u u t
u t
u t
u t ut u
u t u t u u t
um t u m t u m u m t
y t y t y
y t y t y y t
yn t y n t y n y n t
u m t um t
y t y y t
y t
y t
y n t
yn t
u0 u0 u0
u 0 u 0 u 0 u 0
u m 10 u0m 1 u0m 1 u0m 1
y0 y0 y0
y 0 y 0 y 0 y 0
y n 10 y0n 1 y0n 1 y0n 1
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
34
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Korzystając z powyższych oznaczeń – równanie wejście - wyjście
0 f yn t , , y y t , u m t , , u u t ,t
Rozwijamy funkcję
nominalnych
f
w szereg Taylor’a w otoczeniu wartości
f
f
n
n
f
y
,
u
,
t
y
t
y
f y , u ,t y t y
n
y
y
f
f y , u ,t y t y
y
f
f
m
m
f
y
,
u
,
t
u
t
u
f y , u ,t u t u
m
u
u
f
f y , u ,t ut u
u
R
0 f y , u ,t
Biorąc pod uwagę
0 f y ,u ,t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
35
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
i zakładając, że warunki zaniedbania reszty z wyrazów wyższych rzędów są spełnione
f
f
n
f
y
,
u
,
t
y
t
f y , u ,t y t
n
y
y
f
f y , u ,t y t
y
f
f
m
f
y
,
u
,
t
u
t
f y , u ,t u t
m
u
u
f
f y , u ,t u t 0
u
Zlinearyzowane równanie wejście - wyjście
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
36
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
f i
f
n y , u ,t n y , u ,t q q
y
y j
f 1
f 1
f 1
y
,
u
,
t
y
,
u
,
t
y
,
u
,
t
y n
y2n
yqn
1
f 2 y , u ,t f 2 y , u ,t f 2 y , u ,t
y1n
y2n
yqn
f
f
f
q
q
q y , u ,t
y
,
u
,
t
y , u ,t
n
n
n
y1
y2
yq
M n
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
37
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
f i
f
y , u ,t y , u ,t q q
y
y j
f 1
y y , u ,t
1
f 2 y , u ,t
y 1
f q y , u ,t
y 1
M 1
Kazimierz Duzinkiewicz, dr hab. inż.
f 1
y , u ,t f1
y 2
y q
f 2
y , u ,t f 2
y 2
y q
f q
f
y , u ,t q
y 2
y q
y , u ,t
y , u ,t
y , u ,t
Katedra Inżynierii Systemów Sterowania
38
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
f i
f
y , u ,t y , u ,t q q
y
y j
f 1
y y , u ,t
1
f 2 y , u ,t
y1
f q y , u ,t
y1
M 0
Kazimierz Duzinkiewicz, dr hab. inż.
f 1
y , u ,t f1
y2
yq
f 2
y , u ,t f 2
y2
yq
f q
f
y , u ,t q
y2
yq
y , u ,t
y , u ,t
y , u ,t
Katedra Inżynierii Systemów Sterowania
39
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
f i
f
m y , u ,t m y , u ,t q p
u
u j
f 1
f 1
f 1
y
,
u
,
t
y
,
u
,
t
y
,
u
,
t
u m
u2m
u pm
1
f
f
f
2 y , u ,t
2
2
y , u ,t
y , u ,t
m
m
m
u1
u2
u p
f
f
f
q
q
q
y , u ,t
y , u ,t
y , u ,t
m
m
m
u1
u2
u p
N m
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
40
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
f i
f
y , u ,t y , u ,t q p
u
u j
f 1
f 1
y
,
u
,
t
u
u2
1
f 2 y , u ,t f 2
u1
u2
f q y , u ,t f q
u1
u2
N 1
Kazimierz Duzinkiewicz, dr hab. inż.
y , u ,t
y , u ,t
y , u ,t
f 1
y , u ,t
u p
f 2
y , u ,t
u p
f q
y , u ,t
u p
Katedra Inżynierii Systemów Sterowania
41
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
f i
f
y , u ,t y , u ,t q p
u
u j
f 1
f 1
y
,
u
,
t
u
u2
1
f 2 y , u ,t f 2
u1
u2
f q y , u ,t f q
u1
u2
N 0
Kazimierz Duzinkiewicz, dr hab. inż.
y , u ,t
y , u ,t
y , u ,t
f 1
y , u ,t
u p
f 2
y , u ,t
u p
f q
y , u ,t
u p
Katedra Inżynierii Systemów Sterowania
42
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
M n yn t M 1 y t M 0 y t
t N 0 u t 0
N m um t N 1 u
Zlinearyzowane równanie wejście - wyjście
Dodatek A – Przykłady innych modeli
fenomenologicznych
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
43
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Dziękuję
– koniec materiału prezentowanego podczas wykładu
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
44
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Dodatek A
Systemy mechaniczne i inne – przykładowe modele
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
45
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Linearyzacja w otoczeniu punktu równowagi
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
46
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
47
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
48
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
49
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Inne przykłady – Dodatek A
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
50
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Dodatek A
Systemy mechaniczne – przykładowe modele
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
51
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
52
Modelowanie i identyfikacja 2014/2015
M y
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
M y
Katedra Inżynierii Systemów Sterowania
53
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
54
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
55
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
56
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
57
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
58
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
59
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
60
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
uwe t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
61
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
62
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
63
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Z drugiego z ostatnich równań
u we 2 t R2C f 2
du wy t
dt
R2
u wy 2 t
Rf 2
Podstawiając do pierwszego i porządkując otrzymamy
R f 1C f 1 R f 2C f 2
d 2u wy t
dt 2
R f 1C f 1 R f 2C f 2
Kazimierz Duzinkiewicz, dr hab. inż.
Rf 1 Rf 2
R1 R2
du wy t
dt
u wy t
u we t
Katedra Inżynierii Systemów Sterowania
64
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Ustalanie warunków początkowych – przykłady:
systemy elektryczne
W dotychczas przedstawionych przykładach nie skupialiśmy uwagi na
określaniu wartości warunków początkowych dla otrzymywanych r.r.
modelu, gdyż w przykładach tych ich określenie nie powinno
nastręczać trudności. Spotkać można jednak zadania w których
określenie warunków początkowych wymaga pewnego skupienia.
Podamy przykłady takich zadań zaczerpnięte z elektrotechniki
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
65
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Przydatne przy określaniu warunków początkowych wskazówki
Przypomnijmy zależności wiążące wartości napięcia i prądu na
podstawowych elementach układów elektrycznych
iR
uR
u R t
iR t
u R t iR t R
R
- możliwa skokowa zmiana prądu
- możliwa skokowa zmiana napięcia
duC
1
uC t iC d iC t C
C0
d t
t
iC
uC
- możliwa skokowa zmiana prądu
- niemożliwa skokowa zmiana napięcia
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
66
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
iL
1
u L t L
iL t uL d
d t
L0
t
iL
uL
- możliwa skokowa zmiana napięcia
- niemożliwa skokowa zmiana prądu
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
67
Modelowanie i identyfikacja 2014/2015
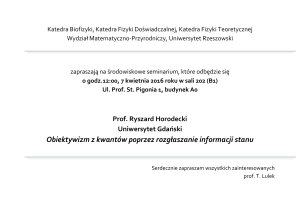
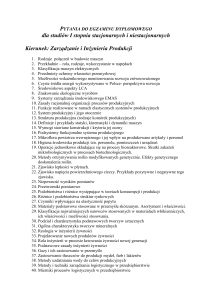
Przykład 1
Technologie modelowania - linearyzacja
L
iL(t)
uL (t)
u(t)
P
C
uC (t)
uR1 (t)
R1
R2
uR2 (t)
Do zacisków układu podłączone jest napięcie u(t)=E. W chwili t=0- tuż
przed przełączeniem
przełącznika P, w obwodzie panuje stan
ustalony. W chwili t = 0 zostaje przełączony przełącznik P zgodnie
ze strzałką na rysunku. Zbudować model matematyczny pozwalający
badać zależność przebiegu napięcia na kondensatorze C oraz prądu
pobieranego ze źródła
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
68
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Model systemu
d 2uC t L duC t
LC
uC t u t 0
dt
R2 dt
Potrzebne warunki początkowe
uC 0
duC 0
?
dt
?
Dla wejściowego oczka, dla każdej chwili t
ut uL t uC t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
69
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
W szczególności
u0 u0 u0 E E 0
uL 0 uL 0 uL 0 uL 0
uC 0 uC 0 uC 0 0 uC 0 uC 0 E
Stąd
uC 0 E
oraz
u L 0 0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
70
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Dalej
duC 0 1
iC 0
dt
C
Prąd i nie może zmienić się skokowo („nagle”) a jego wartość jest
równa
it iC t iRo t
Mamy
i0 i0 i0 0
iC 0 iC 0 iC 0 iC 0
u
0
u
0
u
0
u
0
R2
R1
iRo 0 iR0 0 iR0 0
R2
R1
R2
R1
E E
R2 R1
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
71
Modelowanie i identyfikacja 2014/2015
Zatem
Technologie modelowania - linearyzacja
E E
0 iC 0
R2 R1
E E
iC 0
R1 R2
i ostatecznie
duC 0 1
1 E E E R2 R1
iC 0
dt
C
C R1 R2 C R1 R2
duC 0 E R2 R1
dt
C R1 R2
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
72
Modelowanie i identyfikacja 2014/2015
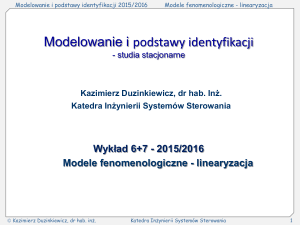
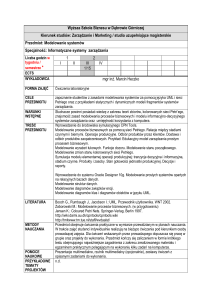
Przykład 2
i (t)
W
Technologie modelowania - linearyzacja
io (t)
iC (t)
uw (t)
u(t)
C
uC (t)
L0
uL (t)
uR (t)
R0
Do zacisków układu podłączone jest napięcie u(t)=E. W chwili tuż
przed wyłączeniem (t=0-) wyłącznika W w obwodzie panował stan
ustalony. W chwili t = 0 zostaje wyłączony wyłącznik W. Zbudować
model matematyczny pozwalający badać zależność przebiegu napięcia
na zaciskach wyłącznika uw (t) przy zadanym napięciu u(t)
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
73
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Model systemu
d 2uW t
duW t
LoC
RoC
uW t ut 0
dt
dt
Potrzebne warunki początkowe
uW 0
duW 0
?
dt
?
Napięcie na kondensatorze nie może się skokowo zmienić, więc
uC 0 uC 0 u 0 E
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
74
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Napięcie na wyłączniku
uW t ut uC t
Równanie spójności dla wejściowego oczka, dla chwil przed
wyłączeniem
ut uC t
Stąd
uW 0 u 0 uC 0 E E 0
uW 0 0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
75
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
duW 0 d
u 0 uC 0
dt
dt
Mamy zależność
duC 0 1
iC 0
dt
C
Ponieważ
oraz
it io t iC t 0
u
0
E
i0 i0 i0 0
Ro
Ro
io 0 io 0 io 0 0 io 0 io 0
iC 0 iC 0 iC 0 iC 0
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
76
Modelowanie i identyfikacja 2014/2015
Stąd
Technologie modelowania - linearyzacja
u
0
E
iC 0
Ro
Ro
Ponieważ
duW 0 d
du
0
d
C
u 0 uC 0 E uC 0
dt
dt
dt
dt
duC 0 1
iC 0
dt
C
Stąd
Kazimierz Duzinkiewicz, dr hab. inż.
duW 0
1
E
dt
RoC
Katedra Inżynierii Systemów Sterowania
77
Modelowanie i identyfikacja 2014/2015
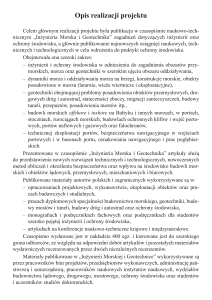
Przykład 3
i (t)
Technologie modelowania - linearyzacja
R
uR (t)
u(t)
L
uL (t)
uRo (t)
iR (t)
R0
iC (t)
uC (t)
C
Do zacisków układu podłączone jest napięcie u(t)=E. W chwili tuż
przed wyłączeniem (t=0- ) wyłącznika W w obwodzie panował stan
ustalony. W chwili t = 0 zostaje wyłączony wyłącznik W. Zbudować
model matematyczny pozwalający badać zależność przebiegu napięcia
na zaciskach odbiornika Ro przy zadanym napięciu u(t)
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
78
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Model systemu
d 2uC t
L duC t
R
LC
RC
1 uC t ut
dt
Ro dt
Ro
Oczywiście, dla t>0
u Ro t uC t
Potrzebne warunki początkowe
uC 0
Kazimierz Duzinkiewicz, dr hab. inż.
?
duC 0
?
dt
Katedra Inżynierii Systemów Sterowania
79
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Ponieważ napięcie na kondensatorze nie może się „nagle” zmienić
uC 0 uC 0
Z stanu ustalonego przed załączeniem wynika
uC 0 E uC 0 E
Dla znalezienia drugiego warunku początkowego
duC 0 1
iC 0
dt
C
Z równania dla węzła
it iC t iRo t
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
80
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Prąd w cewce nie może zmienić się skokowo, więc
i0 i0 0
Stąd
iC 0
i 0
Ro
E
iRo 0
Ro
Zatem
duC 0 1
1
iC 0
E
dt
C
RoC
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
81
Modelowanie i identyfikacja 2014/2015
Technologie modelowania - linearyzacja
Systemy hydrauliczne – przykładowe modele
Kazimierz Duzinkiewicz, dr hab. inż.
Katedra Inżynierii Systemów Sterowania
82
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
83
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
84
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
85
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
86
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
87
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
88
Modelowanie i identyfikacja 2014/2015
Kazimierz Duzinkiewicz, dr hab. inż.
Technologie modelowania - linearyzacja
Katedra Inżynierii Systemów Sterowania
89