Temat: Prądnice i silniki – rodzaje, parametry, zastosowanie
1. Co to są maszyny elektryczne?
Maszyny elektryczne są to urządzenia przeznaczone do przetwarzania energii
elektrycznej na mechaniczną (silnik), mechanicznej na elektryczną (prądnica), elektrycznej
na elektryczną (transformator).
Działanie maszyn elektrycznych opiera się na zjawiskach związanych z polem
magnetycznym, takich jak:
a) zjawisku indukcji elektromagnetycznej,
b) dynamicznym oddziaływaniu pola magnetycznego na przewodnik z prądem,
c) prawie przepływu.
2. Budowa ogólna maszyn elektrycznych.
Podstawowymi częściami każdej maszyny elektrycznej (oprócz transformatora)
wirującej są:
ruchomy wirnik (rotor),
nieruchomy stojan (stator).
W maszynie elektrycznej można wyróżnić dwa obwody elektryczne:
obwód uzwojenia stojana,
obwód uzwojenia wirnika – wykonane z izolowanego drutu miedzianego lub
aluminiowego.
Do doprowadzenia prądu do uzwojenia wirnika służą:
szczotki węglowo- grafitowe,
pierścienie ślizgowe,
komutator.
Jako materiały izolacyjne wykorzystuje się najczęściej:
papier impregnowany,
lakiery izolacyjne
izolacje mikowe.
Trwałość tych materiałów zależna jest przede wszystkim od warunków pracy, takich jak:
temperatura,
wilgotność,
toksyczność środowiska,
wibracje.
Zadaniem obwodów magnetycznych jest rozprowadzenie strumieni magnetycznych
wytworzonych przez prądy w uzwojeniach.
Obwodami tymi są rdzenie stojana i wirnika wykonywane z materiałów ferromagnetycznych
(stal i żeliwo).
Strona 1 z 43 Całość wymienionych powyżej elementów składowych maszyny jest zabudowana w jarzmie,
do którego są przymocowane:
łapy,
tarcze łożyskowe,
szczotkotrzymacze,
wszelkiego rodzaju osłony części wirujących i części będących pod napięciem.
Maszyny są budowane w różnych odmianach zależnych od przeznaczenia (warunków pracy).
Maszyny są klasyfikowane ze względu na:
klasę szczelności obudowy,
temperaturę pracy,
ułożenie (pionowe lub poziome) itp.
3. Maszyny prądu stałego
1) maszyny prądu stałego mogą mieć zastosowanie jako prądnice i jako silniki.
Silniki prądu stałego wykazują dobre właściwości regulacyjne. Umożliwiają one płynną
zmianę prędkości w szerokich granicach oraz mogą ruszać pod dużym obciążeniem. Z tych
względów są dość powszechnie stosowane w napędach :
maszyn wyciągowych;
maszyn walcowniczych;
trakcji elektrycznej;
układów automatyki.
Prądnice prądu stałego są obecnie coraz rzadziej stosowane, gdyż wypierają je przetwornice
tyrystorowe o znacznie większej sprawności i łatwiejsze w eksploatacji.
Obecnie produkuje się maszyny prądu stałego o mocach od kilku watów do ok. 10 MW.
Typowe napięcia to: 120, 230, 440, 500, 1000 V, a nierzadko wyższe, sięgające kilku
kilowoltów.
Strona 2 z 43 2) zasada działania maszyny prądu stałego.
a) prądnica
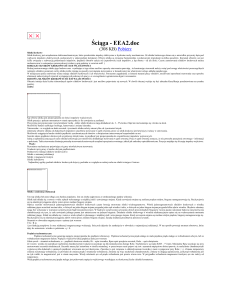
Rozpatrywać będziemy model elementarny składający się z jednego zwoju obracającego się
między dwoma biegunami magnesu. Początek i koniec zwoju są połączone z dwoma
pierścieniami ślizgowymi, po których ślizgają się szczotki odprowadzające prąd do
zamkniętego obwodu zewnętrznego (rys.8.1).
Jeżeli zwój znajdujący się w polu magnetycznym o indukcji B obracamy z prędkością v, to
w jego bokach o długości l indukuje się sem o wartości:
∙ ∙
∙
i kierunku zgodnym z regułą prawej dłoni.
Jeżeli obwód tego zwoju będzie zamknięty (przez szczotki i pierścienie ślizgowe), to popłynie
w nim prąd o kierunku zgodnym ze zwrotem indukowanej siły elektromotorycznej.
Na rys. 8.2 zaznaczono kierunki prądu w bokach 1 i 2 zezwoju przy różnych położeniach tych
boków (kropka oznacza kierunek do nas, krzyżyk od nas).
Jeżeli w analizowanej prądnicy dwa pierścienie zastąpimy dwoma półpierścieniami (rys. 8.3),
po których ślizgają się szczotki, to analizując rys. 8.4 zauważamy, że szczotka S1 zawsze
Strona 3 z 43 zbiera napięcie z boku znajdującego się pod biegunem N, a szczotka S2 zawsze z boku
znajdującego się pod biegunem S. Tak więc na szczotkach S1 i S2 będzie zawsze napięcie
jednokierunkowe. Półpierścienie tworzą komutator, a jeden półpierścień stanowi wycinek
komutatora.
Nazwa komutator pochodzi stąd, że komutuje on, czyli zmienia, kierunek prądu. Komutator
(mechaniczny prostownik prądu).
Aby otrzymać napięcie o dostatecznej równomierności, w polu biegunów umieszcza się nie
jeden zwój, ale wiele zwojów, z których każdy łączy się z odpowiednim wycinkiem
komutatora. Na rys. 8.5 pokazano rozmieszczenie dwóch zwojów między biegunami
i połączenie ich z czterema wycinkami komutatora, a także przebieg sem w każdym zezwoju
oraz linią pogrubioną przebieg sem na szczotkach.
Strona 4 z 43 Zwiększenie liczby wycinków komutatora wpływa na to, że przebieg napięcia odbieranego
z prądnicy jest bardziej równomierny.
Prądnica prądu stałego w istocie działania jest prądnicą prądu przemiennego, taką samą, jak
prądnica synchroniczna, tylko wyposażoną w komutator. W stosunku do prądnicy
synchronicznej zmienione zostały role wirnika i stojana: w maszynie prądu stałego wirnik jest
twornikiem (w nim wytwarza się napięcie), a stojan jest magneśnicą, w prądnicy
synchronicznej najczęściej jest odwrotnie.
b) silnik
Jeżeli do uzwojenia twornika (wirnika) maszyny prądu stałego doprowadzimy napięcie, to
popłynie w nim prąd i twornik zacznie się obracać w wyniku oddziaływania pola
magnetycznego na przewodniki (uzwojenie) z prądem. Maszyna będzie wówczas
przetwarzała energię elektryczną w mechaniczną, będzie silnikiem.
Strona 5 z 43 3) Budowa maszyn prądu stałego.
Każda maszyna prądu stałego składa się z dwóch podstawowych części:
nieruchomego stojana;
wirującego wirnika.
Stojan najczęściej jest magneśnicą, gdyż w nim jest wytwarzane pole magnetyczne. W skład
nieruchomego stojana wchodzą następujące elementy:
jarzmo;
bieguny główne z uzwojeniem wzbudzającym;
bieguny pomocnicze (komutacyjne) z uzwojeniem;
tarcze łożyskowe;
trzymadła szczotkowe (rys. 8.6)
Jarzmo stojana będące najczęściej odlewem żeliwnym lub staliwnym, spełnia dwie role:
jednocześnie jest częścią obwodu magnetycznego i elementem konstrukcyjnym
spełniającym rolę kadłuba, do którego są przymocowane pozostałe elementy
wchodzące w skład stojana.
W maszynach prądu stałego, z wyjątkiem małych maszyn,, pole magnetyczne jest
wytwarzane przez elektromagnes, którego uzwojenie jest umieszczone na biegunach
głównych. Pole magnetyczne w rdzeniu bieguna jest praktycznie stałe, ale w nabiegunniku
występuje pewna pulsacja strumienia spowodowana przez otwarte żłobki wirnika.
Aby zmniejszyć straty wiroprądowe nabiegunniki i rdzenie biegunów wykonuje się z pakietu
blach.
Bieguny pomocnicze są elektromagnesami, których uzwojenie jest umieszczone na litym,
rzadziej pakietowym, rdzeniu stalowym. Uzwojenie tych biegunów jest zawsze połączone
szeregowo z uzwojeniem twornika.
Strona 6 z 43 Wirnik jest najczęściej twornikiem. W jego skład wchodzą:
rdzeń wykonany ze względu na prądy wirowe z pakietu blach (rys. 8.7);
uzwojenie twornika umieszczone w żłobkach rdzenia;
komutator (rys. 8.8.).
Komutator jest osadzony na wale wirnika, składa się z wielu wycinków miedzianych
umieszczonych na specjalnej piaście (rys. 8.8).
Strona 7 z 43 Wycinki komutatora są izolowane od siebie mikanitem. Muszą być one także odizolowane od
piasty. Komutatory powinny być wykonane bardzo starannie. Są one najbardziej
pracochłonnym i najdroższym elementem w maszynie prądu stałego.
Widok ogólny maszyny prądu stałego przedstawia rys. 8.9.
Strona 8 z 43 3.1.
Prądnice prądu stałego.
1) Prądnica obcowzbudna.
Prądnica obcowzbudna jest maszyną, w której obwód wzbudzenia jest zasilany z obcego
źródła. Schemat połączeń prądnicy obcowzbudnej przedstawiono na rys. 8.39,
a rozmieszczenie uzwojeń w maszynie i ich połączenie z tabliczką zaciskową na rys. 8.36.
Charakterystyki obciążenia wyznacza się dla różnych prądów obciążenia otrzymując całą
rodzinę charakterystyk (rys. 8.41). Charakterystyki te otrzymuje się w wyniku przesunięcia
trójkąta, równolegle wzdłuż charakterystyki magnesowania.
Jedną z najbardziej przydatnych w eksploatacji charakterystyk jest charakterystyka
zewnętrzna U=f(I) przy n=const i If=const. Pokazuje ona, jak zmienia się napięcie na
zaciskach prądnicy przy zmianie jej obciążenia przy stałej prędkości obrotowej i stałym
prądzie wzbudzenia. Charakterystykę tę można skonstruować na podstawie charakterystyki
biegu jałowego i trójkąta charakterystycznego.
Strona 9 z 43 2) Prądnica bocznikowa.
W prądnicy bocznikowej uzwojenie wzbudzające jest połączone równolegle z uzwojeniem
twornika. Schemat połączeń przedstawiono na rys. 8.43.
3) Co to jest samowzbudzenie.
Jeżeli w obwodzie magnetycznym istnieje magnetyzm szczątkowy, jako pozostałość po
poprzedniej pracy, to przy napędzaniu wirnika indukuje się w jego uzwojeniu napięcie Esz.
Pod wpływem tego napięcia w uzwojeniu wzbudzającym płynie prąd If, który wytwarza
strumień magnetyczny. Jeżeli kierunek tego strumienia jest zgodny z kierunkiem strumienia
szczątkowego, to strumień w maszynie ulega zwiększeniu, wzrasta napięcie indukowane
i prąd wzbudzenia, co powoduje dalszy wzrost strumienia aż maszyna wzbudzi się do pełnego
napięcia. Gdyby nie było napięcia szczątkowego, procesor wzbudzenia nie mógłby nastąpić,
w takim przypadku należałoby na chwilę zasilić obwód wzbudzenia z obcego źródła napięcia,
aby wytworzyć strumień szczątkowy. Kierunek strumienia wytworzonego przez prąd
wzbudzenia zależy od zwrotu napięcia Esz i sposobu przyłączenia uzwojenia E1-E2 do
zacisków A1-A2, a zwrot napięcia Esz zależy od kierunku wirowania i kierunku strumienia
szczątkowego. Jeżeli więc zmieni się kierunek prędkości lub nieprawidłowo przyłączy się
uzwojenie wzbudzające, to strumień wytworzony przez prąd wzbudzenia będzie skierowany
przeciwnie niż strumień szczątkowy, co spowoduje, że maszyna się rozmagnesuje.
Proces samowzbudzenia się prądnicy bocznikowej trwa do chwili, gdy wartość napięcia U0
i prądu wzbudzenia If0 ustalą się w tym punkcie, gdzie krzywa U=f(If) i prosta RfIf się
przecinają.
Strona 10 z 43 Może być wiele przyczyn niewzbudzenia się prądnicy bocznikowej, m.in.:
brak magnetyzmu szczątkowego;
niewłaściwy kierunek wirowania;
niewłaściwe połączenie obwodu wzbudzenia z obwodem twornika;
przerwa w obwodzie wzbudzenia lub twornika;
zbyt duża rezystancja obwodu wzbudzenia.
4) Prądnica szeregowa.
W prądnicy szeregowej uzwojenie wzbudzające jest połączone szeregowo z uzwojeniem
twornika (rys. 8.47). Prąd obciążenia tej prądnicy jest jednocześnie prądem wzbudzenia.
Jak wynika z charakterystyki zewnętrznej napięcie silnika zależy od prądu obciążenia
(rys. 8.48).
Jest to niekorzystne i dlatego prądnice szeregowe nie znajdują zastosowania.
Strona 11 z 43 5) Prądnica szeregowo-bocznikowa.
Zaletą prądnicy bocznikowej w porównaniu z obcowzbudną jest to, że nie wymaga ona
oddzielnego źródła do zasilania obwodu wzbudzenia, natomiast wadą jest jej silne
zmniejszanie się napięcia przy wzroście obciążenia. Wadę tę można wyeliminować
wprowadzając oprócz uzwojenia bocznikowego drugie uzwojenie wzbudzające, połączone
szeregowo z twornikiem, a zasilane w taki sposób, aby obydwa przepływy były zgodne.
Prądnicę taką nazywamy szeregowo-bocznikową lub dozwoloną (rys. 8.49).
Przez odpowiedni dobór liczby zwojów uzwojenia szeregowego uzyskuje się taki wzrost
strumienia ze wzrostem prądu obciążenia, że napięcie na zaciskach pozostaje prawie stałe.
Gdyby uzwojenie szeregowe zostało połączone nieprawidłowo, strumień magnetyczny
zmniejszałby się silnie ze wzrostem obciążenia.
Strona 12 z 43 3.2.
Silniki prądu stałego.
1) Silnik bocznikowy.
W silniku bocznikowym uzwojenie wzbudzające jest połączone równolegle z uzwojeniem
twornika i zasilane napięciem sieci U (rys. 8.52).
2) Silnik szeregowy.
W silniku szeregowym uzwojenie wzbudzające jest połączone szeregowo z uzwojeniem
twornika (wirnika) i uzwojeniem biegunów komutacyjnych (rys. 8.58).
Prąd pobierany z sieci jest jednocześnie prądem twornika i prądem wzbudzenia.
Właściwości ruchowe silników szeregowych w zasadniczy sposób różnią się od właściwości
ruchowych silników bocznikowych.
Strona 13 z 43 Strumień zależy od prądu obciążenia; wzrostowi momentu obciążenia odpowiada wzrost
prądu obciążenia i wzrost strumienia zgodnie z charakterystyką magnesowania obwodu
magnetycznego maszyny.
Bardzo duża prędkość obrotowa przy małych obciążeniach może doprowadzić do
uszkodzenia silnika ze względu na przekroczenie jego wytrzymałości mechanicznej.
Silnik szeregowy nie może pracować w stanie jałowym i musi być połączony z maszyną
roboczą za pomocą sprzęgła lub przekładni zębatej (nie wolno stosować pasa klinowego).
Wadą silnika szeregowego jest możliwość rozbiegania się, natomiast jego zaletą jest duży
moment rozwijany podczas rozruchu
Mr=cI2r
Moment rozwijany podczas rozruchu jest wprost proporcjonalny do kwadratu prądu
rozruchowego.
Silniki te są stosowane do napędu urządzeń ruszających pod dużym obciążeniem.
3) Silnik szeregowo-bocznikowy.
Silnik szeregowo-bocznikowy ma dwa uzwojenia wzbudzające: bocznikowe i szeregowe
(rys. 8.62.).
Silnik taki ma właściwości zbliżone do silnika bocznikowego lub szeregowego w zależności
od udziału przepływów bocznikowego i szeregowego.
W praktyce stosuje się zgodne połączenie uzwojeń, tzn. takie że strumienie wytworzone przez
uzwojenie szeregowe i bocznikowe dodają się, przy czym przepływ bocznikowy odgrywa
dominującą rolę.
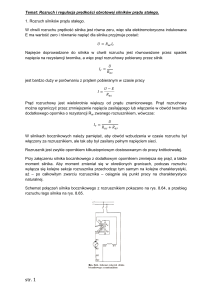
Strona 14 z 43 3.2.1. Rozruch silników prądu stałego.
W chwili rozruchu prędkość silnika jest równa zeru, więc siła elektromotoryczna indukowana
E ma wartość zero i równanie napięć dla silnika przyjmuje postać:
Napięcie doprowadzone do silnika w chwili rozruchu jest równoważone przez spadek
napięcia na rezystancji twornika, a więc prąd rozruchowy pobierany przez silnik
jest bardzo duży w porównaniu z prądem pobieranym w czasie pracy
Prąd rozruchowy jest wielokrotnie większy od prądu znamionowego. Prąd rozruchowy można
ograniczyć przez zmniejszenie napięcia zasilającego lub włączenie w obwód twornika
dodatkowego opornika o rezystancji Rar zwanego rozrusznikiem, wówczas:
W silnikach bocznikowych należy pamiętać, aby obwód wzbudzenia w czasie rozruchu był
włączony za rozrusznikiem, ale tak aby był zasilany pełnym napięciem sieci.
Rozrusznik jest zwykle opornikiem kilkustopniowym dostosowanym do pracy krótkotrwałej.
Przy załączeniu silnika bocznikowego z dodatkowym opornikiem zmniejsza się prąd, a także
moment silnika. Aby moment zmieniał się w określonych granicach, podczas rozruchu
wyłącza się kolejne sekcje rozrusznika przechodząc tym samym na kolejne charakterystyki,
aż – po całkowitym zwarciu rozrusznika – osiągnie się punkt pracy na charakterystyce
naturalnej.
Schemat połączeń silnika bocznikowego z rozrusznikiem pokazano na rys. 8.64, a przebieg
rozruchu tego silnika na rys. 8.65.
Strona 15 z 43 Rozruch silnika szeregowego przebiega podobnie, lecz należy pamiętać, że nie może się on
odbywać bez obciążenia, ponieważ silniki szeregowe rozwijają w chwili rozruchu bardzo
duży moment rozruchowy i mogą się rozbiegać.
W silnikach szeregowo-bocznikowych korzystny wpływ na właściwości rozruchowe ma
dozwojenie. Powoduje ono zwiększenie momentu rozruchowego, poza tym rozruch
przeprowadza się w podobny sposób.
Do ograniczania prądu rozruchowego w silniku obcowzbudnym stosuje się takie same
rozruszniki, jak w pozostałych typach silników.
Strona 16 z 43 3.2.2. Regulacja prędkości obrotowej.
Wzór na prędkość silnika prądu stałego z dodatkową rezystancją w obwodzie twornika Rar:
Φ
Z powyższej zależności wynika, że na zmianę prędkości wirowania wirnika mają wpływ:
napięcie U, rezystancja Rar oraz strumień Φ.
Oznacza to, że prędkość obrotową można regulować:
przez zmianę napięcia zasilania twornika U,
przez zmianę rezystancji w obwodzie twornika Rar,
przez zmianę strumienia Φ
Wszystkie te możliwości są wykorzystywane w praktyce, a różnią się one pod względem:
zakresu regulacji
kierunku regulacji (góra, dół)
ekonomicznym
a) regulacja szeregowa
Regulacja szeregowa polega na włączeniu rezystancji regulacyjnej Rar w szereg z obwodem
twornika. Sposób ten stosuje się zarówno w silnikach bocznikowych jak i szeregowych.
Włączając dodatkową rezystancję w obwód twornika możemy regulować prędkość obrotową
w dół, a więc poniżej prędkości odpowiadającej pracy na charakterystyce naturalnej
(rys. 8.66). Zakres regulacji zawiera się od prędkości znamionowej do zera.
Regulacja szeregowa jest nieekonomiczna.
Strona 17 z 43 b) regulacja bocznikowa
Regulacja bocznikowa sprowadza się do osłabienia strumienia.
W silnikach bocznikowych i obcowzbudnych rezystancję regulacyjną Rfr włączamy w szereg
z obwodem wzbudzenia, a w silniku szeregowym bocznikujemy obwód wzbudzenia.
Włączenie dodatkowej rezystancji w obwód wzbudzenia powoduje zmniejszenie strumienia
i przy określonym prądzie powoduje wzrost prędkości. Zwiększa się przy tym prędkość biegu
jałowego n0 oraz nachylenie charakterystyki mechanicznej (rys. 8.67).
Regulacja bocznikowa jest regulacją w górę od wartości nN do ok. 3nN, a przy tym jest
regulacją ekonomiczną.
Prowadząc regulację prędkości przez zmianę strumienia należy mieć świadomość, jakie
skutki może wywołać nadmierne osłabienie pola lub zanik prądu w obwodzie wzbudzenia
silnika.
Jeżeli przy biegu jałowym strumień zmaleje do wartości strumienia szczątkowego, a silnik nie
zatrzyma się, to prędkość obrotowa wielokrotnie wzrośnie. Z tego względu obwód
wzbudzenia silnika bocznikowego i obcowzbudnego nie wolno rozwierać (w silniku
szeregowym nie wolno zwierać obwodu wzbudzenia). Regulator wzbudzenia powinien być
tak wykonany, aby jego rozwarcie było niemożliwe.
c) regulacja przez zmianę napięcia zasilania
Regulacja prędkości obrotowej przez zmianę napięcia twornika można uzyskać przez
zastosowanie tyrystorowych regulatorów napięcia.
Zmieniając napięcie zasilające twornik, można przy znamionowym obciążeniu regulować
prędkość od zera do wartości większej od prędkości znamionowej (rys. 8.68).
Strona 18 z 43 W całym zakresie regulacji prąd twornika nie ulega zmianie i zależy tylko od obciążenia.
Przy regulacji prędkości przez zmianę napięcia twornika charakterystyka regulacyjna jest
liniowa.
Jest to metoda wygodna i praktycznie bez strat.
Strona 19 z 43 4. Silniki prądu przemiennego.
4.1. Silniki indukcyjne (asynchroniczne).
Maszyny indukcyjne to takie, w których napięcie do obwodu wirnika nie jest doprowadzone
z zewnątrz, lecz pojawia się w wyniku indukcji elektromagnetycznej.
Maszyny indukcyjne mają prostą budowę i w związku z tym charakteryzują się dużą
pewnością ruchową, łatwością obsługi oraz niską ceną. Dzięki temu znalazły one
zastosowanie, najczęściej jako silniki lub hamulce elektryczne, a rzadziej jako prądnice
zwykle do wytwarzania energii elektrycznej w małych elektrowniach. W specjalnych
wykonaniach są stosowane jako przesuwniki fazowe, transformatory nastawne (regulatory
indukcyjne), przetwornice częstotliwości, sprzęgła indukcyjne, serwomechanizmy.
Silniki indukcyjne mają dobre właściwości eksploatacyjne i ruchowe. Ich charakterystyki
można kształtować przez zmianę warunków zasilania i przez zmianę impedancji zewnętrznej
przyłączanej do uzwojeń maszyny. Dlatego też są powszechnie stosowane w układach
napędowych o regulowanej i nieregulowanej prędkości obrotowej.
Rozróżnia się:
- ze względu na sposób zasilania:
maszyny indukcyjne jednofazowe
maszyny indukcyjne dwufazowe
maszyny indukcyjne trójfazowe
- ze względu na sposób wykonania uzwojenia wirnika:
maszyny pierścieniowe
maszyny klatkowe
- ze względu na rodzaj ruchu:
maszyny indukcyjne wirujące
maszyny indukcyjne liniowe
Silniki indukcyjne buduje się obecnie o mocach od kilku watów do kilku megawatów przy
napięciach zasilających od 100 V do 15 kV.
4.1.1. Dlaczego obraca się silnik maszyny indukcyjnej.
Przy zamkniętych obwodach uzwojenia wirnika płynie prąd. Wtedy strumień wirujący
oddziałuje na prąd w uzwojeniu wirnika, wywołując siłę działającą w kierunku pokazanym na
rys. 5.1, na którym zaznaczono także kierunek wirowania strumienia z prędkością n1, kierunki
napięć (a więc i prądów) indukowanych w zamkniętych obwodach wirnika i kierunki sił F
działających na przewody z prądem. Na skutek działania tych sił osadzony w łożyskach
wirnik obraca się w kierunku działania tych sił, a więc w kierunku wirowania strumienia
magnetycznego. W uzwojeniach wirnika indukuje się napięcie tylko wtedy, kiedy istnieje
Strona 20 z 43 ruch strumienia względem tych uzwojeń. Dlatego pod wpływem omawianych sił wirnik
maszyny indukcyjnej może wirować tylko z prędkością n mniejszą od prędkości
synchronicznej, gdyż przy prędkości synchronicznej uzwojenie wirnika byłoby nieruchome
względem strumienia i nie indukowałyby się w nim napięcia. Prędkość różna od
synchronicznej nazywa się prędkością asynchroniczną i dlatego maszyny indukcyjne są
nazywane także maszynami asynchronicznymi.
4.1.2. Silnik klatkowy.
Wirnik klatkowy składa się z nieizolowanych prętów, najczęściej aluminiowych (materiał
lekki i dobrze przewodzący prąd) połączonych na końcach metalowymi przewodzącymi
pierścieniami
(najczęściej z aluminium, miedzi, mosiądzu). Widok takiej klatki przedstawia rysunek 15. Dla
silników małej mocy często cały wirnik wykonywany jest w postaci jednolitego odlewu.
Wykonana w ten sposób klatka stanowi wielofazowe uzwojenie zwarte. Indukowane w takiej
klatce napięcia (pod wpływem pola stojana) są małe, prądy natomiast stosunkowo duże ze
względu na mały opór elektryczny takiej klatki. Pręty klatki nie są w praktyce prowadzone
równolegle do osi obrotu, lecz z lekkim skosem, a to ze względu na cichszą pracę silnika
i łatwiejszy rozruch. Podobnie stojan wirnik także posiada rdzeń z blach elektrotechnicznych
ze żłobkami w których prowadzone są pręty klatki lub uzwojenie. Na duże moce (rzędu setek
kW i pojedynczych MW) wykonywane są silniki klatkowe głębokożłobkowe i dwuklatkowe.
Posiadają one korzystne charakterystyki rozruchowe.
Strona 21 z 43 Symbol trójfazowego silnika indukcyjnego, klatkowego na schematach elektrycznych jest
przestawiony na rysunku 17.
Po lewej stronie zaznaczone są przewody sieci zasilającej (w tym przypadku
trójprzewodowej). Zasilany jest stojan, symbolicznie przedstawiony jako zewnętrzny,
większy okrąg. Wirnik nie ma żadnych wyprowadzeń.
4.1.3. Silnik pierścieniowy.
Wirnik w silniku pierścieniowym posiada uzwojenia nawinięte, podobnie jak stojan,
przewodami izolowanymi. Prowadzone są one w żłobkach blach wirnika (widok takiej blachy
pokazany jest na rysunku 18).
Strona 22 z 43 Wszystkie fazy tego uzwojenia najczęściej zwarte są początkami (tworząc połączenie
w gwiazdę), i z wyprowadzonymi końcami. Każdy z końców (w przypadku silnika
trójfazowego jest ich oczywiście trzy) przyłączony jest do jednego pierścienia (najczęściej
miedzianego) osadzonego na wale wirnika i od niego odizolowanego.
Na każdym z tych pierścieni ślizga się szczotka węglowa, przyłączona do tabliczki
zaciskowej silnika. Dzięki temu do uzwojenia wirnika silnika pierścieniowego można
przyłączyć rezystory zewnętrzne, służące np. do rozruchu lub regulacji prędkości obrotowej
silnika (patrz rozdział czwarty). Stosowane jest także skojarzenie uzwojeń wirnika w trójkąt,
najczęściej dla silników większych mocy, rzędu dziesiątek kW. Symbol silnika
pierścieniowego na schematach elektrycznych przedstawiony jest na rysunku 20.
Uzwojenie stojana zasilane jest podobnie jak w poprzednim przypadku. Natomiast
wyprowadzone są jeszcze uzwojenia wirnika (trzy końce). Wirnik symbolicznie oznaczany
jest jako mniejszy, wewnętrzny okrąg, tak jak w rzeczywistym silniku, obracający się
wewnątrz stojana. Silniki asynchroniczne pierścieniowe są droższe od klatkowych i w efekcie
nie są tak rozpowszechnione.
4.1.4. Rozruch silników indukcyjnych (asynchronicznych).
Rozruchem nazywamy taki stan pracy od chwili załączenia napięcia do osiągnięcia przez
maszynę ustalonej prędkości określonej parametrami zasilania (napięciem i częstotliwością)
i obciążenia (momentem hamującym).
Rozruch silnika jest możliwy tylko wtedy, gdy istnieje nadwyżka momentu wytworzonego
przez silnik M nad momentem obciążenia Mh. Przy rozpatrywaniu jakości rozruchu bardzo
istotna jest wartość prądu pobieranego z sieci w czasie rozruchu – prąd ten nazywa się prądem
rozruchowym Ir, oraz wartość momentu rozwijanego przez silnik w chwili rozruchu moment
ten nazywa się momentem rozruchowym Mr (lub momentem początkowym).
Strona 23 z 43 Na podstawie uproszczonego schematu zastępczego silnika w stanie zwarcia (s = 1)
określamy:
prąd rozruchowy pobierany z sieci
przybliżoną wartość prądu silnika pracującego w warunkach znamionowych
Z porównania tych dwóch zależności wynika, że prąd pobierany podczas rozruchu ze
zwartym uzwojeniem wirnika jest kilkukrotnie większy od prądu znamionowego (Ir =
4÷10IN).
Rozruch bezpośredni, polegający na zasileniu silnika pełnym napięciem znamionowym,
można stosować tylko przy silnikach małych.
Dla silników większych mocy stosuje się różne sposoby poprawy warunków rozruchu silnika.
Dąży się do tego, aby w czasie rozruchu:
zmniejszyć prąd rozruchowy, ale jednocześnie (o ile to możliwe) powiększyć moment
rozruchowy.
Można to osiągnąć następującymi metodami:
przez zmianę napięcia zasilania uzwojenia stojana (za pomocą przełącznika gwiazdatrójkąt. autotransformatora lub transformatora)
przez włączenie rezystancji lub reaktancji dodatkowej w obwód wirnika
przez włączenie rezystancji lub reaktancji dodatkowej w obwód stojana
przez zmianę częstotliwości napięcia zasilającego uzwojenie stojana
Stąd wynikają najczęściej stosowane w praktyce sposoby rozruchu silników indukcyjnych.
Strona 24 z 43 4.1.4.1. Rozruch za pomocą rozrusznika.
Ten sposób rozruchu można stosować tylko dla silników pierścieniowych. Polega on na
włączeniu w obwód uzwojenia wirnika nastawianej (płynnie lub skokowo) rezystancji
dodatkowej, nazywanej rozrusznikiem.
Silnik przyłącza się do sieci zasilającej z włączonym w obwód wirnika rozrusznikiem
nastawionym na największą rezystancję (położenie 4 na rys. 6.26b).
Strona 25 z 43 Po osiągnięciu odpowiedniej prędkości obrotowej należy przełączyć rozrusznik na następny
stopień (położenie 3) i kolejno aż do zwarcia rozrusznika.
Przełączenia powinny następować w takiej chwili, aby nie pojawił się prąd większy niż
początkowy prąd rozruchowy.
Przy przedwczesnym przełączeniu z jednego na drugi nastąpiłoby niepożądane, nadmierne
„uderzenie prądu” i nagłe zwiększenie momentu obrotowego. Byłoby to przyczyną
gwałtownych przyspieszeń i niespokojnej pracy maszyny. Zbyt późne przełączenie z jednego
stopnia na drugi powoduje wydłużenie czasu rozruchu.
Od właściwego doboru rozrusznika i sposobu posługiwania się nim zależy przebieg zjawiska
przy rozruchu (rys. 6.26c). Im większa jest liczba stopni rozrusznika, tym płynniejszy
i krótszy jest rozruch. Sterowanie urządzeniem rozruchowym może być ręczne lub
automatyczne.
4.1.4.1.1. Przeznaczenie rozruszników.
Rozruszniki są przeznaczone do pracy dorywczej lub przerywanej (tylko w czasie rozruchu)
i dlatego oblicza się je pod względem cieplnym na krótki czas pracy. Należy pamiętać, że nie
można używać rozrusznika do pracy ciągłej, gdyż groziłoby mu nadmierne nagrzanie
i uszkodzenie.
4.1.4.1.2. Samorozruch silników indukcyjnych.
Nawet przy krótkotrwałym zaniku lub znacznym obniżeniu napięcia następuje zmniejszenie
się prędkości obrotowej i silnikowi grozi utknięcie. Jeżeli czas trwania zaniku napięcia jest
krótszy od czasu potrzebnego silnikowi na zatrzymanie się od chwili wyłączenia silnika z
sieci, to w określonych warunkach jest możliwe utrzymanie silnika w ruchu i w miarę wzrostu
napięcia powrót do normalnego stanu pracy po pewnym czasie. Proces ten nazywamy samo
rozruchem silnika.
4.1.4.2. Rozruch za pomocą przełącznika gwiazda – trójkąt.
Przełącznik gwiazda – trójkąt może być używany do rozruchu tylko takich silników
indukcyjnych, które mają wyprowadzone na tabliczkę znamionową sześć końcówek
uzwojenia stojana. Napięcie sieci zasilającej powinno być równe napięciu znamionowemu
uzwojenia stojana połączonego w trójkąt.
4.1.4.2.1. Zasada działania.
Silnik załącza się do sieci przy ustawieniu przełącznika na „rozruch” w takim położeniu, przy
którym uzwojenie stojana jest połączone w gwiazdę (rys. 6.27a). Wirnik silnika zaczyna
wirować. W chwili, gdy ustali się prędkość obrotowa wirnika, przełącznik należy przełączyć
w położenie, przy którym uzwojenie stojana zostanie połączone w trójkąt.
Zmiany momentu oraz prądu pobieranego przez silnik z sieci w czasie takiego rozruchu
przedstawionego na rys. 6.27b.
Strona 26 z 43 Po podłączeniu w gwiazdę i właściwym doborze silnika, napięcie każdej fazy uzwojenia
stojana jest √3 - krotnie mniejsze niż napięcie znamionowe. Prąd pobierany w tym stanie
sieci jest więc w przybliżeniu 3 – krotnie mniejszy niż prąd, jaki popłynąłby w przypadku
połączenia w trójkąt.
Moment rozruchowy jest również w przybliżeniu 3 – krotnie mniejszy niż moment
powstający przy połączeniu w trójkąt.
Ten sposób rozruchu stosuje się tylko do rozruchów lekkich (silnik obciążony niewielkim
momentem hamującym).
Strona 27 z 43 4.1.4.3. Rozruch za pomocą autotransformatora.
Układ połączeń do rozruchu za pomocą transformatora lub autotransformatora przedstawiono
na rys. 6.28.
Transformatory stosowane do tego celu mają stałą lub nastawialną (płynnie lub skokowo)
przekładnię napięciową nu. Napięcie sieci zasilającej powinno być równe napięciu
znamionowemu stojana.
4.1.4.3.1. Zasada działania.
Rozruch silnika rozpoczyna się przy nastawieniu wartości napięcia odpowiadającej
przyjętemu nieprzekraczalnemu prądowi rozruchowemu zamykając wyłączniki W1, W2, W3
przy otwartym wyłączniku W4. Następnie, jeżeli transformator ma regulowaną przekładnię,
stopniowo powiększa się napięcie zasilające silnik do wartości znamionowej.
Po ustaleniu się prędkości silnika, otwiera się wyłącznik W2 i W3, zamykając natychmiast
wyłącznik W4. W tym przypadku napięcie zasilające silnik Ur jest niższe od napięcia sieci U.
1
∙
Moment rozruchowy
∙
jest
∙
1
∙
razy mniejszy od momentu przy pełnym napięciu, a prąd hamulcowy:
∙
∙
1
∙
jest nu razy mniejszy od prądu płynącego w uzwojeniach silnika w czasie rozruchu przy
pełnym napięciu. Prąd płynący zaś w uzwojeniu pierwotnym autotransformatora, czyli prąd
pobierany z sieci:
Strona 28 z 43 1
jest
∙
∙
1
∙
razy mniejszy od prądu płynącego podczas rozruchu bezpośredniego.
Wniosek.
Stosując do rozruchu autotransformatora o przekładni nu2 uzyskuje się zmniejszenie momentu
rozruchowego
razy, co jest wadą tej metody rozruchu oraz zmniejszenie prądu
razy, co jest zaletą. Jednocześnie nu razy zmniejsza się prąd płynący w
pobieranego z sieci
uzwojeniach silnika.
4.1.4.4. Rozruch za pomocą rezystancji włączonej w obwód stojana.
Ten sposób rozruchu jest stosowany tylko w przypadku silników małej mocy, ponieważ
uzyskuje się tu ograniczenie prądu rozruchowego, ale jednocześnie bardzo znaczne
zmniejszenie momentu rozruchowego.
4.1.5. Zmiana kierunku wirowania i regulacja prędkości.
1. Aby zmienić kierunek wirowania wirnika silnika indukcyjnego, należy więc zmienić
kierunek wirowania pola magnetycznego w maszynie. Aby to uzyskać należy zmienić
kolejność faz sieci zasilającej silnik.
2. Prędkość obrotowa wirnika silnika indukcyjnego będzie się zmieniała, jeżeli zmienia się
jedna z wielkości:
częstotliwość napięcia zasilającego
liczba par biegunów magnetycznych
poślizg
4.1.5.1. Regulacja prędkości przez zmianę częstotliwości napięcia
zasilającego.
Zmieniając częstotliwość zasilania f1, regulujemy prędkość wirowania pola magnetycznego, a
w konsekwencji prędkość wirowania wirnika. Sposób ten umożliwia regulację prędkości
płynną lub skokową w zakresie od prędkości równej zeru do prędkości maksymalnej
dopuszczalnej ze względów wytrzymałościowych.
W większości przypadków jest pożądane zachowanie stałej wartości strumienia, dlatego
regulując częstotliwość f1 należy tak zmieniać wartość napięcia zasilającego, aby /
(rys. 6.29b).
Sposób ten wymaga oddzielnego źródła zasilania o regulowanej częstotliwości. Metoda ta
staje się coraz bardziej popularna.
Regulacja prędkości przez zmianę częstotliwości napięcia zasilającego polega na
zastosowaniu półprzewodnikowych regulatorów mocy, zwanych falownikami.
Strona 29 z 43 4.1.5.2. Regulacja prędkości przez zmianę liczby par biegunów.
Regulacja prędkości przez zmianę par biegunów można osiągnąć stosując:
dwa niezależne uzwojenia w stojanie o różnych liczbach biegunów magnetycznych
jedno uzwojenie, które można przełączać tak, aby wytwarzało pola o różnych liczbach
par biegunów
Umieszczenie w stojanie dwóch niezależnych uzwojeń o różnych liczbach par biegunów
umożliwia skokową regulację prędkości obrotowej (dwie prędkości) przez zmianę uzwojenia
przyłączonego do sieci zasilającej.
Ten sposób regulacji jest stosowany tylko w silnikach klatkowych, gdyż klatka sama
dostosowuje się pod względem liczby par biegunów do liczby par biegunów uzwojenia
stojana.
Umieszczenie dwóch uzwojeń wpływa na powiększenie wymiarów silnika i gorsze
wykorzystanie materiału.
Silniki, w których dokonuje się regulacji prędkości obrotowej przez zmianę liczby par
biegunów magnetycznych nazywamy wielobiegunowymi.
Znalazły one szerokie zastosowanie szczególnie do napędu obrabiarek. Koszt silnika
czterobiegunowego jest większy niż kosz silnika zwykłego o takiej samej mocy, a mimo to
stosowanie go w różnych napędach jest opłacalne.
Strona 30 z 43 4.1.5.3. Regulacja prędkości przez zmianę rezystancji w obwodzie
wirnika (zmianę poślizgu z jakim pracuje silnik).
Jeśli silnik pracuje ze zwartymi pierścieniami (Rd = 0) i napędza maszynę roboczą o stałym
momencie hamującym Mh niezależnym od prędkości obrotowej (rys. 6.30), to po włączeniu
rezystancji dodatkowej Rd1 w obwód wirnika ustali się nowy punkt pracy 1 przy prędkości
obrotowej wirnika zmniejszonej do wartości nI. Dalszy wzrost rezystancji do wartości Rd2
spowoduje dalsze zmniejszenie prędkości obrotowej do wartości nII.
Ten sposób regulacji jest nieekonomiczny, ponieważ w rezystorach regulacyjnych występują
duże straty mocy. Stosuje się go w szerszym zakresie prędkości tylko dla małych silników,
natomiast w silnikach dużych tylko do regulacji prędkości w zakresie 10÷15 %.
4.1.5.4. Regulacja prędkości przez zmianę napięcia zasilającego
(zmianę poślizgu, z jakim pracuje silnik).
Przy stałym momencie hamującym Mh, na zmianę poślizgu z jakim pracuje silnik, można
także wpłynąć przez zmianę napięcia zasilającego U1. Poślizg krytyczny sk, przy którym
występuje moment krytyczny Mk, nie zmienia się, ale zmianie ulega wartość tego momentu.
Na rys. 6.31 pokazano przebieg zmian prędkości przy obciążeniu stałym momentem
hamującym Mh = MN, przy zmianach napięcia zasilającego.
Strona 31 z 43 Punkt pracy 1 znajduje się na charakterystyce naturalnej w przecięciu z prostą Mh = MN;
odpowiada mu prędkość znamionowa nN. Punkty 2 i 3 są odpowiednio punktami pracy przy
obniżonych napięciach; odpowiadają im prędkości obrotowe n2 i n3.
Przy napięciu obniżonym do 0,7UN moment krytyczny Mk = MN. Jest to więc graniczna
krzywa, wyznaczająca dla Mh = MN zakres regulacji prędkości w granicach
, co
odpowiada zakresowi poślizgów
. Oznacza to, że zakres regulacji prędkości
obrotowej przez zmianę napięcia zasilającego wynosi niewiele ponad 10 % w dół od
prędkości znamionowej.
Ten sposób regulacji prędkości obrotowej nie jest więc korzystny. Zakres regulacji jest bardzo
mały, a dodatkowo silnikowi grozi utknięcie na skutek zmniejszenia się przeciążalności. W
praktyce ten sposób regulacji prędkości obrotowej silnika indukcyjnego prawie nie jest
stosowany.
WNIOSEK:
Silniki indukcyjne w porównaniu z innymi silnikami (np. silnikami prądu stałego) mają małe
możliwości regulacji prędkości obrotowej. Jest to jedna z wad tych silników. Dopiero szersze
stosowanie techniki półprzewodnikowej (do regulacji częstotliwości napięcia zasilającego)
spowoduje wyeliminowanie tej wady.
Strona 32 z 43 4.2.
Rodzaje maszyn synchronicznych.
4.2.1. Co to jest maszyna synchroniczna.
Maszyną synchroniczną nazywamy się maszyną prądu przemiennego, której wirnik w stanie
ustalonym obraca się z taką samą prędkością, z jaką wiruje pole magnetyczne.
4.2.2. Zasada działania
synchronicznej.
i
zależności
występujące
w
maszynie
Między prędkością obrotową maszyny synchronicznej n (w obr/min), liczbą par biegunów
magnetycznych p i częstotliwości f (w Hz) występuje stała zależność:
60
Strumień magnetyczny w maszynie synchronicznej może być wytwarzany przez magnes
trwały lub – znacznie częściej – przez elektromagnes. Bieguny magnetyczne wytwarzające
stały w czasie strumień magnetyczny, najczęściej są umieszczone w wirniku, zwanym
magneśnicą. Jeżeli strumień jest wytwarzany przez elektromagnes, to uzwojenie magnesów
(może być ono skupione lub rozłożone, rys. 7.1) jest zasilane prądem stałym zwanym prądem
wzbudzenia.
W stojanie (zwanym twornikiem) jest umieszczone uzwojenie prądu przemiennego
jednofazowego lub znacznie częściej trójfazowe (rys. 7.2).
Strona 33 z 43 Prąd wzbudzenia jest pobierany zwykle z obcego źródła, np. baterii akumulatorów lub
prądnicy prądu stałego, zwanej wzbudnicą, która może być umieszczona na wspólnym wale z
maszyną synchroniczną.
Moc potrzebna do wzbudzenia maszyny synchronicznej na ogół nie przekracza 1 % jej mocy
znamionowej (rys. 7.3).
Strona 34 z 43 W małych maszynach stosuje się niekiedy taką konstrukcję, że uzwojenie wzbudzające jest
umieszczone w stojanie, wtedy stojan jest magneśnicą, a wirnik jest twornikiem (rys. 7.4).
W dużych maszynach taka budowa jest niecelowa, ponieważ odprowadzenie dużych prądów
z wirnika wymagałoby dużych wymiarów szczotek i pierścieni.
Strona 35 z 43 Maszyny synchroniczne mogą pracować jako:
prądnice
silniki
kompensatory synchroniczne
Jeżeli uzwojenie wzbudzające jest zasilane prądem stałym, to wytworzy się strumień φf. Przy
napędzaniu wirnika ze stałą prędkością n, strumień magnetyczny skojarzony z daną fazą
uzwojenia stojana zmienia się sinusoidalnie i indukuje w tej fazie napięcie, które również
zmienia się sinusoidalnie. Jeżeli w tworniku znajduje się uzwojenie trójfazowe, to indukuje
się w nim układ napięć trójfazowych. Maszyna przetwarza doprowadzoną do niej energię
mechaniczną w elektryczną, jest więc prądnicą.
W sytuacji odwrotnej, gdy uzwojenie stojana zasilimy z sieci symetrycznym prądem
trójfazowym o częstotliwości f1, powstanie pole magnetyczne wirujące z prędkością
∙
. Uzwojenie wirnika jest zasilane za pomocą pierścieni ślizgowych, z oddzielnego źródła
prądu stałego, w wyniku czego w wirniku wytworzy się pole magnetyczne stałe. Wirnik
powinien być tak skonstruowany, aby wytworzona liczba biegunów magnetycznych była taka
sama, jak liczba biegunów magnetycznych wytworzonych przez uzwojenie stojana.
Maszyna elektryczna może napędzać maszynę roboczą: pobierając moc elektryczną,
przetwarza ją w moc mechaniczną i dlatego pracuje jako silnik. Ponieważ praca jest możliwa
tylko przy jednej synchronicznej prędkości, dlatego maszynę taką nazywa się maszyną
synchroniczną.
Jeżeli moment obciążający silnik synchroniczny będzie się zwiększać, to spowoduje to
opóźnienie wirniki w stosunku do wirującego pola stojana o pewien kąt, ale wirnik będzie
dalej wirował synchronicznie, gdyż dzięki kątowi rozchylenia między strumieniami stojana
i wirnika i przyciąganiu się tych strumieni powstaje moment obrotowy równoważący
zewnętrzny moment hamujący.
Gdyby jednak silnik został obciążony momentem większym niż maksymalny moment
elektromagnetyczny, jaki występuje przy kącie zawartym między osiami pól magnetycznych
stojana i wirnika równym 90o, silnik wypadłby z synchronizmu i się zatrzymał.
Zakres mocy produkowanych obecnie maszyn synchronicznych zawiera się w granicach od
kilkudziesięciu watów (mikrosilniki synchroniczne) do 1500 MW przy napięciach od kilku
woltów do 28 kV.
Strona 36 z 43 4.2.3. Budowa maszyn synchronicznych.
Maszyny synchroniczne są budowane w dwóch zasadniczych odmianach:
z biegunami utajonymi (z wirnikiem cylindrycznym)
z biegunami jawnymi (z wirnikiem jawno biegunowym)
Obwód magnetyczny stojana (rdzeń) tworzą pakiety złożone z blach o grubości 0,35÷0,5 mm.
Rdzeń jest osadzony w korpusie wykonanym jako odlew lub konstrukcja spawana.
W żłobkach pakietu twornika jest umieszczone uzwojenie prądu przemiennego jednofazowe
lub trójfazowe. Stojan maszyny synchronicznej jest wykonany bardzo podobnie do stojana
maszyny indukcyjnej.
Wirnik maszyny synchronicznej nie jest przemagnesowany, wykonuje się go więc z materiału
litego (odkuwki stalowej lub odlewu staliwnego). Na wirniku jest umieszczone uzwojenie
wzbudzające zasilane prądem stałym. Szczelina powietrzna jest w maszynie synchronicznej
znacznie większa niż w maszynie indukcyjnej i wynosi 5÷50 mm. Duża szczelina powietrzna
wymaga większego prądu i powoduje większe straty mocy wzbudzenia, lecz jest korzystna ze
względu na przeciążalność maszyny.
Każda maszyna musi mieć odpowiednio wykonany układ chłodzenia do odprowadzania
ciepła powstałego w wyniku strat w stali i miedzi.
4.2.4. Rodzaje maszyn synchronicznych.
a) maszyny z biegunami utajonymi
Maszyny z biegunami utajonymi to maszyny pracujące z dużymi prędkościami obrotowymi,
najczęściej jako generatory napędzane turbinami parowymi, stąd ich nazwa turbogeneratory.
Ich prędkość wynosi 3000 obr/min (rzadziej 1500 obr/min), aby więc uzyskać częstotliwość
napięcia 50 Hz należy zastosować uzwojenie dwubiegunowe. Wszystkie turbogeneratory
pracują z wałem w położeniu poziomym (rys. 7.5). Maszyny o takiej budowie mogą również
pracować jako silniki.
Strona 37 z 43 Wirnik turbogeneratora (magneśnica) jest wykonany z odkuwki łącznie z wałem
z wysokowytrzymałościowej stali magnetycznej.
Żłobek (rys. 7.6) jest wyłożony odpowiednią izolacją, a poszczególne pręty uzwojenia
wzbudzającego są izolowane między sobą. W celu zabezpieczenia uzwojeń przed
wypadnięciem, żłobki są zaklinowane klinami z metali niemagnetycznych, np. z mosiądzu,
twardych stopów aluminiowych. Połączenia czołowe uzwojeń, leżące poza żłobkami, są
zabezpieczone przed działaniem sił odśrodkowych za pomocą cylindrycznych osłon, tzw.
kołpaków (rys. 7.7). Kołpaki są elementem podlegającym największym naprężeniom w
turbogeneratorze, dlatego też wykonuje się je z wysokogatunkowej stali o dużej
wytrzymałości. Końcówki uzwojenia wzbudzającego są wyprowadzone do pierścieni
ślizgowych przez odpowiednie otwory w wale. Po pierścieniach ślizgają się szczotki
umieszczone w trzymadłach szczotkowych.
Strona 38 z 43 Rdzeń stojana jest wykonany z pakietów izolowanych blach elektromagnetycznych o małej
stratności. Grubość pakietu wynosi 4÷5 cm. Znajdujące się między pakietami blach rozpórki
tworzą promieniowe kanały wentylacyjne o grubości kilku milimetrów. Rdzeń znajduje się w
spawanym korpusie, który spełnia rolę konstrukcji nośnej, a jednocześnie dzięki
odpowiednim komorom ukierunkowuje przepływ czynnika chłodzącego.
W żłobkach stojana (rys. 7.9) jest umieszczone dwuwarstwowe uzwojenie twornika. W celu
zabezpieczenia przed skutkami bardzo dużych sił przy zwarciach, połączenia czołowe są
mocowane do odpowiednich wsporników na obwodzie.
Maksymalne napięcie znamionowe, na jakie są wykonywane turbogeneratory, to 28 kV. Tak
wysokie napięcie wymaga szczególnej izolacji. Izolację wykonuje się na prętach poza
maszyną, a następnie gotowe, zaizolowane i sprasowane do odpowiednich wymiarów pręty są
układane w żłobkach. W turbogeneratorach najczęściej stosuje się chłodzenie powietrzne
pośrednie w obiegu zamkniętym.
Ze względu na to, że sprawność turbin dużych jest znacznie większa niż małych,
turbogeneratory dla potrzeb energetyki zawodowej są budowane na maksymalne moce.
Obecnie mocą graniczną jest 1500 MW. Zwiększenie mocy można uzyskać przez
zwiększenie wymiarów i lepsze wykorzystanie materiałów. Zwiększenie wymiarów jest
ograniczone ze względów wytrzymałościowych i transportowych. Poprawę wykorzystania
materiałów uzyskuje się przez zwiększenie ich obciążenia, a to wymaga bardzo intensywnego
chłodzenia w celu utrzymania przyrostów temperatury w dopuszczalnych granicach.
W turbogeneratorach o mocach do 200 MW stosuje się bezpośrednie chłodzenie wodorowe
uzwojeń wirnika (rys. 7.11) i pośrednie chłodzenie wodorowe uzwojeń stojana. Przy mocach
powyżej 200 MW w uzwojeniu stojana musi być zastosowane chłodzenie bezpośrednie.
Strona 39 z 43 b) maszyny z biegunami jawnymi
Do grupy maszyn z biegunami jawnymi należą hydrogeneratory, tj. generatory napędzane
turbinami wodnymi. Ponieważ turbiny wodne mają małe prędkości, dlatego też
hydrogeneratory muszą być wykonane z dużą liczbą biegunów. Przy prędkościach
kilkudziesięciu obrotów na minutę liczba biegunów wynosi kilkadziesiąt. Przy małej
prędkości obrotowej siły odśrodkowe są niewielkie i średnice mogą być odpowiednio duże.
Dochodzą one do kilkunastu metrów przy mocach dochodzących do kilkuset megawatów.
Wirniki takie mają małą długość. Maszyny takie najczęściej pracują z wałem pionowym
(rys. 7.13).
Nabiegunniki, a czasami całe bieguny, są wykonane z blachy o długości ok. 1 mm. W
zewnętrznej części nabiegunników często umieszcza się pręty zwarte na obu końcach przez
odpowiednie pierścienie. Tworzy się w ten sposób klatkę tłumiącą lub rozruchową. Pozostałe
Strona 40 z 43 zasady budowy są podobne do zasad budowy turbogeneratorów. Moce znamionowe
hydrogeneratorów dochodzą do kilkuset megawatów (rys. 7.14).
c) silniki synchroniczne
Zasady budowy silników synchronicznych dużej mocy są takie same, jak generatorów. Silniki
synchroniczne małej mocy (do kilku kilowatów) są wykonywane z magneśnicą w stojanie,
a twornikiem w wirniku. Coraz szersze zastosowanie znajdują maszyny synchroniczne
z magnesami trwałymi.
4.3.
Silniki synchroniczne.
Silnik synchroniczny jest zbudowany podobnie jak prądnica, z tym że większość silników ma
zabudowaną w wirniku klatkę rozruchową umożliwiającą samoczynny rozruch.
W większości przypadków silniki synchroniczne są wykonywane jako maszyny z biegunami
jawnymi, a więc występuje w nich nie tylko moment synchroniczny, ale i moment
reluktancyjny.
Podstawową wadą silnika synchronicznego jest brak momentu rozruchowego. Dzieje się tak
dlatego, że przy nieruchomym wirniku wytworzony przez uzwojenie twornika strumień
wirując napotyka kolejno bieguny wirnika różnych znaków pociągając je raz w jednym raz w
drugim kierunku. Średnia wartość momentu obrotowego jest równa zeru i wirnik i wirnik nie
może ruszyć z miejsca.
Strona 41 z 43 4.3.1. Rozruch silników synchronicznych.
Rozruch silnika synchronicznego można przeprowadzać:
wykorzystując moment asynchroniczny silnika synchronicznego wytworzony przez
klatkę rozruchową i lity blok żelaza wirnika, po włączeniu silnika do sieci;
stosując pomocniczą maszynę napędową;
wykorzystując moment synchroniczny (tzw. rozruch częstotliwościowy)
4.3.1.1. Rozruch asynchroniczny
Silniki synchroniczne, dla których przewiduje się ten typ rozruchu, są wyposażone w klatkę
rozruchową (podobną do klatki wirnika silnika indukcyjnego klatkowego) umieszczoną
w nabiegunnikach. Klatka rozruchowa jest wykonana z brązu lub mosiądzu, w celu
powiększenia momentu rozruchowego. Silnik taki ma w wirniku dwa uzwojenia:
wzbudzające i klatki rozruchowej.
Po przyłączeniu twornika do sieci, w rozwartym uzwojeniu wzbudzającym indukowałoby się
napięcie, w początkowym okresie rozruchu wielokrotnie większe od znamionowego. Wynika
to stąd, że wirnik jest w pierwszej chwili nieruchomy, a więc pole wirujące wytworzone przez
przepływ stojana wirowałoby z bardzo dużą prędkością względem wirnika. Tak duże napięcie
stwarzałoby groźbę przebicia izolacji uzwojenia wzbudzającego i mogłoby być niebezpieczne
dla obsługi. Aby nie dopuścić do powstania przepięcia, należy zamknąć obwód wzbudzenia
przez odpowiednio dobraną rezystancję (rys. 7.38).
Po osiągnięciu przez silnik prędkości obrotowej, przy której poślizg s < 0,05, należy odłączyć
rezystancję przyłączoną do uzwojenia wzbudzającego i zasilić to uzwojenie napięciem. Pod
wpływem wytworzonego momentu synchronicznego silnik wchodzi w synchronizm, przy
czym przebieg zjawiska jest taki sam, jak przy włączaniu do sieci prądnicy metodą
samosynchronizacji. Jeżeli rozruch silnika odbywa się na biegu jałowym, to silnik może
wejść w synchronizm pod wpływem momentu reluktancyjnego i wtedy napięcie wzbudzenia
Strona 42 z 43 włącza się przy prędkości synchronicznej. Po włączeniu napięcia wzbudzenia należy nastawić
prąd wzbudzenia na wartość zbliżoną do wartości znamionowej, aby ewentualne zmiany
momentu obciążenia nie powodowały wypadnięcia silnika z synchronizmu.
Silnik synchroniczny podczas rozruchu asynchronicznego pobiera duży prąd rozruchowy,
niekiedy znacznie większy od znamionowego, który może powodować wahania napięcia sieci
oraz nadmierne nagrzewanie się silnika. Prąd rozruchowy ogranicza się takimi samymi
metodami, jak w silniku indukcyjnym (jeżeli pozwalają na to warunki rozruchu).
4.3.1.2. Rozruch za pomocą dodatkowej maszyny
Przy zastosowaniu rozruchu z dodatkową maszyną napędzającą, silnik synchroniczny załącza
się do sieci tak, jak prądnicę, a więc metodą synchronizacji dokładnej lub
samosynchronizacji. Ten sposób rozruchu, ze względu na konieczność stosowania
dodatkowych maszyn, jest kłopotliwy i dlatego jest stosowany bardzo rzadko.
4.3.1.3. Rozruch częstotliwościowy
Ten sposób rozruchu polega na zasilaniu uzwojenia twornika uruchamianego silnika
z oddzielnej prądnicy synchronicznej, której prędkość obrotową, a więc i częstotliwość,
zwiększa się od zera do prędkości synchronicznej. Jeżeli uzwojenie silnika jest zasilane przy
włączonym wzbudzeniu silnika, to przy powolnym uruchamianiu prądnicy i stopniowym
zwiększaniu jej prędkości, wirnik silnika będzie nadążać za wirnikiem prądnicy. Po
osiągnięciu prędkości obrotowej, odpowiadającej częstotliwości sieci, można włączyć cały
zespół do sieci, odłączając jednocześnie prądnicę rozruchową.
Do rozruchu częstotliwościowego można stosować zamiast prądnic synchronicznych
przetwornik częstotliwości.
Strona 43 z 43