Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Zbudowanie quadrocoptera w celu badania możliwości
wykorzystania zawansowanej techniki komputerowej w
poszukiwaniach na obszarach miejskich oraz poza miejskich
Uczniowie:
Opiekun:
Kamil Resel
mgr inż. Stefan Chałat
Michał Janik
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Strona
Zespół Szkół Nr 1 we Wrocławiu
1
Grzegorz Bandarek
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Spis treści
Uzasadnienie realizacji projektu ..........................................................................................................3
Teoria działania quadrocoptera...........................................................................................................5
Zestaw niezbędnych części wraz z opisem działalna .......................................................................... 10
Rama ............................................................................................................................................ 10
Zestaw odbiorczo nadawczy .......................................................................................................... 11
Silniki ............................................................................................................................................ 12
Regulatory ok. 25-30A, częstotliwość pracy 400Hz ........................................................................ 13
Bateria Li-pol 3S 4000-5000mAh ................................................................................................... 13
Śmigła 11x4,7 ................................................................................................................................ 14
Serce quadrocoptera..................................................................................................................... 15
Oczy quadrocoptera ...................................................................................................................... 16
Składanie aparatury w jedną całość ze zdjęciami ............................................................................... 17
Konfiguracja aparatury, regulatorów i ArduCoptera .......................................................................... 25
Podłączanie kabli odbiornika i ArduCoptera .................................................................................. 25
Ustawienia aparatury nadawczo odbiorczej .................................................................................. 26
Konfiguracja ArduCoptera (APM 2.6)............................................................................................. 26
Konfiguracja regulatorów .............................................................................................................. 27
Test silników ..................................................................................................................................... 29
Konfigurowanie trybów lotu ............................................................................................................. 32
Testowanie quadrocoptera ............................................................................................................... 35
Zbadanie możliwości quadrocoptera w celu poszukiwania osób zaginionych ..................................... 36
Strona
2
Literatura: ......................................................................................................................................... 37
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Uzasadnienie realizacji projektu
Quadrocopter to pojazd latający, który do wytworzenia odpowiedniego ciągu używa czterech
silników wirnikowych. Silniki ustawione są w pionie dzięki czemu uzyskujemy odpowiednią
stabilność pojazdu a regulując odpowiednio moc silników wybranych silników uzyskujemy
możliwość poruszania się w wielu osiach. Jednym z głównych zastosowań tego typu
pojazdów latających jest zbieranie informacji multimedialnych obrazy /zdjęcia za pomocą
zamocowanej kamery. W ten sposób można dokonywać penetracji miejsc trudno dostępnych
oraz niebezpiecznych.
Analogicznie
można
taki pojazd wykorzystać do
działań
szpiegowskich lub poszukiwawczych. W Naszym projekcie skupimy się nad wykorzystaniem
takiego urządzenia w działaniach poszukiwawczych oraz możliwości wykonywania zdjęć
plenerowych podczas uroczystości szkolnych.
Quadrocopter
jest jedną z nielicznych platform, która umożliwia osobom bez wiedzy
specjalistycznej na sterowanie tego typu pojazdami. Dzięki rozwojowi techniki mamy
możliwość zbudowania pojazdu poruszającego się w przestrzeni na wielu płaszczyznach
samodzielnie, z dostępnych elementów na rynku i uczynić urządzenie prostym w obsłudze .
Takie pojazdy mogą być sterowane bezprzewodowo wykorzystując do tego fale radiowe w
otwartym paśmie 2.4 Ghz lub 5 Ghz.
Główne założenia projektu będą dotyczyły skonstruowania pojazdu o małej masie i
odpowiedniej wytrzymałości. Celem jest zbudowanie niedużego pojazdu latającego z
możliwością płynnego zmieniania kierunków lotu ze stabilną pozycją w powietrzu. Do
skonstruowania urządzenia zostaną wykorzystane najnowsze materiały takie jak włókno
węglowe oraz układy cyfrowe i mechaniczne wraz z odpowiednią optyką umożliwiająca
płynne nagrywanie obrazu. Urządzenie będzie sterowane bezprzewodowo za pomocą
odpowiedniego manipulatora lub oprogramowania zainstalowanego na urządzeniu typu
użytecznego w wykorzystaniu przy poszukiwaniu osób zaginionych potrzebujących pomocy
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Strona
W pracy skupimy się nad zbudowaniem pojazdu latającego i uczynieniem go jak najbardziej
3
smartfon.
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
czy to w terenie górskim, leśnym, czy miejskim. Dodatkowo zajmiemy się filtracją sygnałów
pomiarowych i opracowaniem algorytmu sterowania. W celu opracowania odpowiedniego
oprogramowania dla terenów o różnej gęstością zalesienia czy zabudowy. Dodatkowo
powstały pojazd będzie wykorzystywany do filmowania i wykonywania zdjęć z lotu ptaka
podczas imprez szkolnych, które na terenie Naszej szkoły są organizowanie cyklicznie na
przykład impreza integracyjna w maju z udziałem osób niepełnosprawnych.
Do zrealizowania projektu przyjęliśmy następującą metodologię realizacji projektu
- zapoznanie się dostępnymi publikacjami oraz materiałami i literaturą fachową
- zgromadzenie gotowych projektów
- modyfikacja wybranego rozwiązania na użytek projektu
- zgromadzenie/zakupienie niezbędnych elementów
- montaż elementów w większe grupy stanowiące całość
- testowanie poszczególnych zmontowanych podzespołów
- synchronizacja elementów
- testowanie zmontowanego quadrocoptera
- opracowanie algorytmu
- napisanie kodu sterującego
- testowanie oprogramowania
- wgranie oprogramowania w celu przetestowania urządzenia
- filtracja sygnałów pomiarowych
- testowanie urządzenia
- badanie propagacji sygnału radiowego w zależności terenu w jakim się porusza
- montaż optyki
Strona
4
- testowanie quadrocoptera z zamontowaną optyką
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Teoria działania quadrocoptera
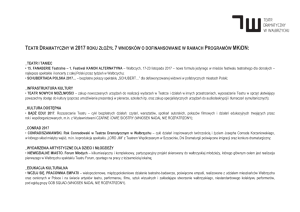
Quadcoptery używają do wznoszenia się i poruszania czterech silników, dwa silniki obracają
śmigłami w kierunku przeciwnym niż dwa pozostałe. Śmigła obracające się w tych samych
kierunkach są zamontowane na przeciwległych ramionach przedstawia to rysunek nr 1:
Rysunek 1 Montaż śmigieł w układzie krzyża
Powyżej przedstawiony rysunek jest jedną z dwóch koncepcji ustawień ramion dla
quadrocoptera. Inną koncepcją konstrukcyjną jest układ X porównanie obydwóch rozwiązań
Strona
5
przedstawia rysunek nr 2.
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rysunek 2 Porównanie koncepcji konstrukcyjnych + i X
Konstrukcja w układzie X zdobyła większą popularność wynika to z faktu łatwiejszego
zamontowania optyki z przodu bez zasłaniania kadru kamery przez śmigła. Dlatego
konstrukcja quadrocoptera w projekcie zostanie oparta o układ X w której ten problem nie
występuje.
Ważnym elementem powyższego rysunku są opisy obrotów: CW czyli ClockWise - obrót
zgodnie ze wskazówkami zegara i CCW - Counter-ClockWise - obrót w kierunku
przeciwnym do wskazówek zegara. Oznaczenia śmigieł wynikają z faktu że jedna para
śmigieł zajmuje się ciągnięciem a druga pchaniem dlatego śmigła dzielimy na ciągnące
nazywane „normalnymi” i pchające. W quadcopterach używa się i jednych i drugich
ponieważ silniki parami obracają się w przeciwnych kierunkach. Silniki obracające śmigłami
normalnymi (ciągnącymi) wytwarzają siłę "ciągnącą" do góry. Jeżeli na wszystkich silnikach
zostały by użyte śmigła ciągnące to dwa z czterech silników wytwarzałyby na tych śmigłach
siłę w przeciwnym kierunku niż śmigła "ciągnące" i nigdy statek by się nie uniósł. Zatem na
dwóch silnikach obracających się w przeciwnym kierunku używa się śmigieł "pchających"
"ciągnącą" i statek porusza się w górę. Koncepcję wnoszenia przedstawia rysunek 3.
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Strona
wszystkie tak obracające się silniki i odpowiednio dobrane do nich śmigła wytwarzają siłę
6
aby w ostatecznym rozrachunku wytwarzały siłę skierowaną zwrotem do góry. W rezultacie
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rysunek 3 Koncepcja wytworzenia siły ciągnącej
Każdy quadcopter może wykonywać pełen zakres podstawowych manewrów podczas lotu
czyli:
unosić się i opadać (ALTITUDE/THROTTLE)
obracać się wokół osi poziomej poprzecznej, co powoduje lot do przodu lub do tyłu
(PITCH)
obracać się wokół centralnej osi pionowej (YAW)
obracać się wokół osi poziomej wzdłużnej czyli kręcić beczki (ROLL)
Do wykonywania wszystkich manewrów quadrocopter nie używa nachylenia łopat tak jak to
ma miejsce w helikopterach czy samolotach a jedynie poprzez regulację prędkości obrotów
Strona
7
poszczególnych silników
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rysunek 4 Prezentacja rozkładu sił w układzie + (zielone przód)
Jak widać idea sterowaniem quadcopterami jest stosunkowo prosta - gorzej jednak z jej
zastosowaniem w praktyce. Analogowe sterowanie obrotami poszczególnych silników przez
pilota np. przy użyciu czterech dźwigni mocy silników praktycznie niemożliwe. Dlatego
Quadcoptery z natury
są niestabilne i najprostszym sposobem jest sterowanie mocą i
obrotami poszczególnych silników poprzez zaprogramowane wcześniej algorytmy. Ze
względu na złożoność sterowania silnikami centralnym punktem quadrocoptera jest płytka
sterująca
która
poprzez
specjalnie
zaprogramowane
algorytmy/programy
steruje
poszczególnymi silnikami Zastosowania specjalistycznej płytki sprowadza sterowanie
quadrocopterem do prostej czynności a lot staje się bardzo stabilny. Utrzymanie stabilnych
parametrów lotu nie było by możliwe bez zastosowania szeregu czujników które dostarczają
pokładowemu komputerowi niezbędnych informacji o położeniu quadrocoptera w przestrzeni.
Tymi czujnikami są najczęściej żyroskopy i akcelerometry, a dodatkowo mogą być
Global
Positioning
System
(GPS).
Akcelerometr – czujnik mierzący akcelerację czyli przyśpieszenie. Przyspieszenie to ściśle
związane z masą ciał i działającymi na masę siłami np. siłą grawitacji w przypadku ziemskich
warunków. Przyspieszenie ziemskie wynosi g = 9,8 m/s^2 taka wartość zostanie wskazana
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
8
barometr
Strona
magnetometry,
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
przez czujnik leżący na ziemi w stanie spoczynku. Quadcopterami porusza się w obszarze
działania siły grawitacji, przyspieszenie ziemskie służy akcelerometrowi do określania gdzie
jest "dół" a gdzie "góra" w trakcie lotu koptera oraz pozostałe położenia poruszania się drona.
Żyroskop to z kolei urządzenie, które służy bezpośrednio do określania położenia kątowego
masy w przestrzeni i wykorzystuje do tego zasadę zachowania momentu pędu. W
uproszczeniu: tradycyjne żyroskopy w swoim środku mają obracającą się masę, która
utrzymuje zawsze takie samo położenie w przestrzeni. Dzięki temu jeśli żyroskop zmienia
swoje położenie a wirująca w środku masa NIE możemy w odniesieniu do niej określić kąt
zmiany tego położenia.
Użycie magnetometru nierozłącznie wiąże się z użyciem GPS w przypadku lotów np.
Arducopterem w trybach autonomicznego wykonywania misji, samodzielnego powrotu do
miejsca startu czy wykonywania okręgów nad wskazanym punktem. Co więcej - Arducopter
wyklucza użycie GPS bez magnetometru.
GPS – globalny system pozycjonowania umożliwia za pomocą sygnału satelitarnego
określenie pozycji urządzenia. GPS nie pozwala jednak na określenie zwrotu, czyli informacji
w którą stronę jest odwrócony quadrocopter. W przypadku zawisu lub zwrotu system GPS nie
jest w stanie określić kierunku do tego właśnie używany jest magnetometer który do
określenia kierunku wykorzystuje ziemskie pole magnetyczne ziemi która podobnie jak igła
kompasu wskazuje odpowiedni kierunek. Do poprawnego działania urządzenie musi być
oddalone od wszelkiego rodzaju materiałów metalowych oraz słupów wysokiego napięcia.
Jak widać quadrokoptery wykorzystują bardzo zawansowaną technikę komputerową w celu
wykonywania lotów. Bez rozwoju współczesnej technologii i miniaturyzacji nie byłoby
tak
zawansowanych
wielowirnikowych
urządzeń
latających.
9
zbudowanie
Strona
możliwe
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Zestaw niezbędnych części wraz z opisem działalna
- Nadajnik (aparatura) i odbiornik RC
- Kontroler lotu (płytka sterująca)
- Silniki bezszczotkowe wolnoobrotowe (do 1000KV) - 4 sztuki o ciągu 950 gram szt.
- Regulatory ok. 25-30A, częstotliwość pracy 400Hz - 4 sztuki
- Bateria Li-pol 4000-5000mAh, pakiet 3S (+ ładowarka mikroprocesorowa)
- Śmigła 10x4,5 lub 11x4,7 - 4 sztuki
- Adaptery do montażu śmigieł do silników - 4 sztuki
- Rama
Rama
Rama zdjęcie 1 wykonana została z włókna węglowego oraz rurek z tkaniny węglowej 3K
precyzyjnie wyciętej na CNC. Zastosowany materiał jest obecnie jednym z najlżejszych
materiałów waga ramy to 476g i przy tak niskiej masie ma bardzo dobry współczynniku
masy do wytrzymałości. Rozstaw silników na ramionach wynosi to 650 mm a przekrój
ramion to 16 mm. Dodatkowo rama posiada składane ramiona, które po złożeniu
umożliwiają wygodne transportowanie zestawu w terenie. Stabilność konstrukcji
zapewnia zestaw mocujący T10 dzięki któremu mamy możliwość zamontowania
dodatkowych akcesoriów takich jak gimbal, kamera, akumulatora itp.
Strona
10
Zdjęcie 1 Zmontowana rama quadrocpotora Tarot 650
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Zestaw odbiorczo nadawczy
Aparatura FlySky FS-TH9X 9CH 2,4GHz Mode 2 - LCD - Turnigy 9x jest jedną z
najpopularniejszych używaną w modelach latających aparaturą złożoną z nadajnika
zdjęcie 2 i odbiornika zdjęcie 4 montowanego w ramie. Odbiornik za pomocą enkodra
komunikuje się z elementami na płytce sterującej. Parametry przedstawia tabela 1.
Turingy 9x może pracować w dwóch trybach modulacji PPM oraz PCM. Komunikacja
3
4
5
6
7
8
9
10
11
12
Odbiornika:
Lp.
1
2
3
Parametr
Ilość kanałów
Oprogramowanie
Pasmo częstotliwości
Ilość kanałów przeszukiwania
System modulacji
Modulacja
Wartość
9CH
Heli / Samolot / Szybowiec
2.40-2.48GHz
160
GFSK
PPM/PCM
Parametr
Typ wyświetlacza LCD
Kontrola niskiego napięcia
Gniazdo DSC (trenerasymulator)
Gniazdo ładowarki
Zasilanie
Pobór prądu
Waga
ANT długość
Rozmiar
Kolor
Certyfikat
Zasięg
Wartość
128 * 64 punktów
< 9V
TAK - wtyk JACK 3,5mm - sygnał
PPM
TAK
9.6-12VDC, 8xAA NiCd/NiMh
120mA
670g
26mm
190 x 80 x 240mm
Czarny
CE, FCC
stabilny na poziomie 800 metrów
Parametr
Liczba kanałów
Zasilanie
Pobór Prądu
Wartość
8
4,8V - 6V
9,5mA (dla 4,8V)
Tabela 1 Parametry turingy 9x
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Strona
Specyfikacja
Lp.
1
2
3
4
5
6
Nadajnik:
Lp.
1
2
11
odbywa się na 9 kanałach. W projekcie użyto modulacji PPM.
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Zdjęcie 2 Odbiornik
Zdjęcie 3 Aparatura nadawcza
Zdjęcie 4 Odbiornik
Silniki
Najważniejszy mechanizm napędowy naszej maszyny wielowirnikowej to silniki
bezszczotkowe o ciągu około 1 kilograma Emax MT2216 CW 810KV - 228W - ciąg
950g. zdjęcie 5. Silniki swoją konstrukcją się przystosowane do montażu pod ramę Tarot.
Ważnym elementem jest wyważenie sielników tak aby zniwelować drgania podczas
Strona
Zdjęcie 5 Silnik Emax
12
osiągania wysokich obrotów przez silniki.
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Regulatory ok. 25-30A, częstotliwość pracy 400Hz
Przy wyborze regulatorów kierowaliśmy się zakresem pracy oraz mocą jaki i
funkcjonalnością i wagą. Nasz wybór padłna regulatory zintegrowane o łącznej mocy 40
A firmy Emax zdjęcie 6.
Zdjęcie 6 Regulator zamontowany na ramie
W przypadku regulatorów wykorzystywanych w platformach latających pożądaną opcją
jest wsparcie trybu Fast PWM (ang. Pulse-Width Modulation), które uruchomiono w
konstrukcji. Ma to znaczenie, ponieważ na wejściu regulatorów znajduje się filtr
dolnoprzepustowy, który opóźnia reakcję na sygnał sterujący, co nie jest sytuacją
pożądaną.
polimerowa zdjęcie 7 o pojemności ok. 5000 mAh powinna zapewnić ok. 20 minut lotu.
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Strona
Standardowa bateria "modelarska" - 3-celowa (3S - zawiera 3 cele w baterii) litowo-
13
Bateria Li-pol 3S 4000-5000mAh
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Zdjęcie 7 Bateria podpięta pod ładowarkę mikroproceserową
Śmigła 11x4,7
Wielkość śmigieł jest ściśle związana z silnikiem, którego użyjemy oraz rozstawem ramion
ramy. Nasz konstrukcja bez problemu pozwoli na zastosowanie śmigieł 11 calowych są one
Strona
Zdjęcie 8 Silnik z zamontowanymi śmigłami
14
sprzedawane w komplecie wraz z silnikami zdjęcie 8.
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Serce quadrocoptera
Mózgiem Naszej maszyny wielowirnikowej będzie dedykowany zestaw ardupilot zdjęcie
9. Z powodu wprowadzonych ograniczeń budżetowych i mając ograniczony czas na
realizację projektu zdecydowaliśmy się skorzystać z gotowego rozwiązania posiadającego
wszystkie niezbędne czujniki umożliwiające sterowanie quadrocopterem. Wybór takiego
rozwiązania pozwolił nam się skupić na aspekcie użyteczności i funkcjonalności maszyny
pomijając część związaną z pisaniem algorytmów od nowa. Ardupilot jako jedno z wielu
rozwiązań na rynku posiada predefiniowane trybu lotu i stabilizacji. Zapewniając
realizację wszystkich zakładanych celów.
Strona
15
Zdjęcie 9 ArduPilot podłączony do odbiornika
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Oczy quadrocoptera
Oczami naszej maszyny latającej tymczasowo została kamera GOPRO HERO 4 Black
Adventure Edition zdjęcie 10. Aktualnie oczekujemy na realizację docelowego zamówienie w
postaci szeroko kątnej kamery Sony full HD wraz z goglami które umożliwią operatorowi
widzieć dokładnie tak ja by był pasażerem drona.
Zdjęcie 10 Dron z zamontowaną optyką GOPRO
Strona
16
Całość zestawu w ostatecznym etapie zostanie wzbogacona o gimball konstrukcję zapewniającą
stabilizację optyki. Stabilizacja zapewni nam stabilny obraz podczas lotów i wykonywania manewrów
w locie.
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Składanie aparatury w jedną całość ze zdjęciami
Zdjęcie 11 Złożony quadrocopter
12 sztuk konektorów (wtyczek) 3.5mm (do połączenia silników)
1 gniazdo XT-60 (do zasilania regulatorów)
taśma rzepowa 10mm (taśma do kabli z rzepem dwustronnym);
kluczyk imbusowy z sześciokątnym (lub gwiazdkowym) zakończeniem 2mm;
skrawek filcowy jako podkładka "antywibracyjna" pod GPS i ArduCopter;
rurka termokurczliwa 3.2mm średnicy, ok. 1m (lub na sztuki po ok. 10mm długości;
6 śróbek M2, 10-12mm;
zippery plastikowe;
Pierwszym elementem montażu jest zmontowanie ramy na której będą osadzone pozostałe
elementy quadrocoptera. Etapy montażu przedstawione są na kolejnych zdjęciach.
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Strona
17
Elementy potrzebne do poprawnego zmontowania wszystkich elementów
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Zdjęcie 12 Montaż poszczególnych części ramy
Strona
18
Zdjęcie 13 Montaż wymaga precyzji i skupienia
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Proces montowania jest kilku etapowy i nienależny on do trudnych, wymaga jedynie precyzji w
wykonywanych czynnościach i cierpliwości. Ostatecznym wynikiem prac jest gotowa rama
przygotowana na montaż silników zdjęcie 14
Zdjęcie 14 Kompletnie zmontowana rama
Po zmontowaniu ramy przychodzi czas na montaż pozostałej elektroniki w naszym projekcie
jest to”
silniki x 4
regulator
kable łączące silniki z regulatorem
odbiornik
płytka sterująca (u nas ArduCopter APM 2.6)
GPS
Pierwszym elementem elektronicznym jaki montujemy są to nasze silniki. Do zamontowania
ich na ramie używamy dostarczonych wraz z zestawem płytek montażowych do których będą
Strona
tylko na dwóch śrubach jednak to powinno wystarczyć.
19
przykręcone silniki. Rozstaw otworów wymusza że silniki zdjęcie 15 będą zamontowane
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Zdjęcie 15 Silnik zamontowany do ramy
Po zamontowaniu silników należało jeszcze przylutować konektory do końcowych
Zdjęcie 16 Proces lutowania konektorów
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Strona
20
przewodów zdjęcie 16
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
W celu zabezpieczenie przewodów miejsca lutowania zabezpieczamy koszulkami
termokurczliwymi rysunek 17.
Zdjęcie 17 Zabezpieczanie koszulkami termokurczliwymi
Kolejnym etapem jest montaż regulatora silników. Przy jego montażu musimy zadbać o to
aby dostarczyć mu odpowiednią cyrkulację powietrze gdyż jest to jeden z elementów które
najbardziej wydzielają ciepło. Brak jego odprowadzania może spowodować przegrzanie się
układu. Regulator montujemy na rzep. Jest to bardzo eleganckie rozwiązanie które pozwala
nam na wielokrotne przemieszczanie regulatora bez ingerowania w konstrukcję mocującą.
Sposób montażu regulatora przedstawia zdjęcie numer 17. Przed ostatecznym montażem
regulatora należy do niego zamontować wszystkie dwanaście przewodów które są
wyprowadzone z czterech silników. Mocujemy je śruby montażowe które znajdują się w
podłączeniu silnika należy sprawdzić czy podłączona kolejność jest prawidłowa. Nie
prawidłowe podłączenie nie wpłynie negatywnie na elektronikę.
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Strona
montażu silniki mogą się kręcić w niepoprawną stronę. Dlatego po każdorazowym
21
regulatorze. Należy pamiętać że kolejność ma znaczenie w przypadku nieprawidłowego
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Zdjęcie 18 Montaż regulatora silników na ramie
Zdjęcie 19 Montaż baterii
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Strona
22
Krwią naszego układu będzie 12 volt baterii Li-Pol 3 celowej o bardzo szybkim prądzie rozładowania
40 C. baterię montujemy pod spodem naszego quadrocoptera przedstawia to rysunek 19.
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Ostatnim etapem montażu przed konfiguracją aparatury jest montaż mózgu naszego
quadrocoptera a mianowicie AdruCoptera. Ze względu na czułość urządzenia montujemy go
na samej górze oddzielając do płytką węglową od pozostałych elementów elektronicznych
przedstawia to rysunek 20.
Zdjęcie 20 Montaż ArduCoptera
Nasz Arducopter wyposażony jest w GPS ze względu na uniknięcie błędów pomiarowych
nadajnik montujemy najwyżej jak się da rysunek 21. Po zmontowaniu całości należy podpiąć
ArduCoptera z odbiornikiem. Używamy do tego odpowiednich wejść kanałowych podłączmy
Strona
23
jeden do jednego czyli pierwszy kanał do pierwszego i tak dalej.
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Strona
24
Zdjęcie 21 Montaż GPS na wysięgniku
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Konfiguracja aparatury, regulatorów i ArduCoptera
Podłączanie kabli odbiornika i ArduCoptera
Połączenie poszczególnych komponentów przedstawia rysunek 5:
Rysunek 5 Schemat połączeń
Co do samego podłączania - patrząc od prawej strony:
mamy odbiornik (u nas Optima 9),
który podpinamy do
ArduCoptera w
gniazdaInputs - do tego celu używamy zawartych w zestawie z APM 2.6 (ArduCopter)
kabelków zakończonych z obu stron wtyczkami serw. Kanały podpinamy 1:1 czyli 1-szy
kanał na odbiorniku do 1-szego kanału na ArduCopter Inputs.
do ArduCopter Outputs z kolei będziemy podpinać kable z regulatorów. Tutaj już nie
będzie tak prosto: pod poszczególne kanały Outputs muszą być wpięte konkretne silniki, a na
to wpływa orientacja naszego Emax'a 4in1 i to, w które "kanały" regulatorów zostały wpięte
Strona
25
poszczególne silniki.
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Ustawienia aparatury nadawczo odbiorczej
Przy wprowadzeniu ustawień opieramy się o oficjalną instrukcję dostępną pod adresem
tutaj: http://copter.ardupilot.com/wiki/ac_tipsfornewpilots/
If any of the controls are reversed (pitch or roll are backwards, meaning the copter moves in
the opposite direction as your stick), you’ll need to reverse the affected channel at your RC
transmitter side. Please see your RC transmitter’s manual if you’re not familiar with the
process. It’s a good idea tore-do your RC calibration in the Mission Planner after you’ve
reversed a channel.
Konfiguracja ArduCoptera (APM 2.6)
Pierwszym krokiem w konfiguracji ArduCoptera jest ściągnięcie MissionPlanera i
ewentualnie zainstalowanie sterowników USB oraz wgranie firmware. Ekran z programu
Strona
26
przedstawia zdjęcie 22
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Zdjęcie 22 Planer ArduCoptera
Przed przystąpieniem do regulacji wymontowujemy śmigła
Regulację możemy przeprowadzić na dwa sposoby
1.
poprzez kreatora ustawień krok po kroku,
2.
ręcznie przeklikać po kolei wszystkie pola w Mission Plannerze: InitialSetup -
-Mandatory hardware
Warning: it is very important to master flying in stabilize before moving on to other flight
modes and it is highly recommended that the pilot is always able to easily and rapidly switch
back to stabilize mode from other flight modes in case of unexpected or undesirable flight
behavior.
Strona
27
Konfiguracja regulatorów
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Następnym krokiem po wstępnej konfiguracji ArduCoptera jest konfiguracja naszych
regulatorów. Możemy to zrobić w standardowy sposób - tak jak ma to miejsce w samolotach
RC, gdy używamy tylko jednego regulatora. My wprawdzie mamy ich 4-ry, ale możemy je
przecież konfigurować pojedynczo: każdy osobno po kolei podpinamy pod 3 kanał
odbiornika (do konfiguracji podpinamy je do odbiornika, nie do Ardu) i konfigurujemy
zgodnie z instrukcją danego regulatora (w zależności od producenta regulatora proces
konfiguracji może wyglądać różnie). Jedyny problem jaki możemy napotkać w trakcie takiej
kalibracji związany jest z tym, że regulator Emax 4in1 25A ma: 1 kabel trójżyłowy (biały
sygnałowy, czarny masa i czerwony +) oraz 3 kable jedynie sygnałowe (białe). Jednak, żeby
przeprowadzić kalibrację ręcznie każdego z regulatorów potrzebujemy zasilać każdy kabel
sygnałowy (czyli każdy regulator) podpinany aktualnie pod odbiornik. Czyli nie wystarczy
wpiąć jedynie białego sygnałowego. To z kolei powoduje, że z tego kabla trójżyłowego
zakończonego wtyczką serwa trzeba wyjąć (podważyć plastikowe blokady na wtyczce) dwie
żyły: czarną i czerwoną, żeby móc je wpinać potem razem z kolejnymi kablami sygnałowymi
idącymi
do
poszczególnych
regulatorów.
Co do samych ustawień regulatora - zalecane ustawienia regulatorów do obsługi ArduCoptera
1.
Brake: OFF
2.
Battery Type: Ni-xx(NiMH or NiCd) (even if you’re using Li-po batteries
this setting reduces the likelihood that the ESC’s low voltage detection will turn
off the motors)
CutOff Mode: Soft-Cut (Default)
4.
CutOff Threshold: Low
5.
Start Mode: Normal (Default)
6.
Timing: MEDIUM
Strona
28
3.
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Test silników
Przyszedł czas na test silników. Jeśli regulatory zostały skalibrowane to możemy zamontować
śmigła. Podłączamy zasilanie do regulatora/ArduCoptera oraz podpinamy ArduCopter do
komputera przez USB.
Teraz uruchamiamy nasz MissionPlanner, klikamy Connect i przechodzimy do
zakładki Terminal.
Znów klikamy Connect i czekamy aż terminal będzie aktywny.
Wpisujemy: Test <Enter> motors<Enter>.
Od tej chwili ArduCopter będzie przeprowadzać test silników
Jeżeli kolejność obrotu silników jest inna to znaczy silnik (regulator) został podpięty pod zły
kanał na ArduCopter Outputs. Jeżeli z kolei jakiś silnik obraca się w złą stronę oznacza to,
że trzeba przepiąć dwa dowolne kable (z trzech) łączące ten silnik z regulatorem. Tak to
wygląda w praktyce:
Instrukcja z internetu =/= instrukcja z pudełka regulatora
Okazuje się, że ogólnodostępne instrukcje on-line do regulatora Emax 4in1 mogę nie być w
100% odpowiadające regulatorowi, który posiadamy mimo, że jest to Emax 4in1. Warto
zatem sprawdzić co zawiera własna instrukcja z pudełka po regulatorze - szczególnie jeśli
chodzi o rodzaje trybów odpowiadające poszczególnym "beep'om".
2. W normalnej procedurze startu regulatora odgrywany jest najczęściej dźwięk: "beep-----"beep-----" - oznacza, że wykryto prawidłowo drążek gazu w pozycji MIN (minimum)
"beep beep beep" - oznacza, że wykryto baterię 3-celową (odpowiednio dla większej
ilości celi będzie więcej "beepów"
melodia "~3 2 1" - pozytywne zakończenie testu (self-test is finished)
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Strona
29
beep beep beep ~3 2 1", który oznacza kolejno:
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
3. Jeśli drążek gazu nie będzie ani w MIN ani w MAX tylko gdzieś pomiędzy podczas
wpięcia zasilania w regulator - będzie wydawany ciągły dźwięk "beep beep beep beep itd."
4. Utrzymanie drążka dłużej niż ok. 2 sekundy w pozycji MAX wprowadza regulator w tryb
programowania (co zostało pokazane na drugim filmiku powyżej).
5. Programowalne parametry regulatora (wg mojej instrukcji w odpowiedniej kolejności)
to:
1.
Timing Advance (dla niskich KV silników zalecany jest niski timing, dla
Low: 0 stopni
o
Mid-low: 8 stopni
o
Middle: 15 stopni (DEFAULT)
o
Mid-High: 23 stopnie
o
High: 30 stopni
2.
Start Mode:
o
0.03
o
0.05
o
0.06
o
0.09
o
0.13
o
0.19
o
0.25
o
0.38
o
0.50
o
0.75 (DEFAULT)
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Strona
o
30
wysokich KV - wysoki):
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
o
1.00
o
1.25
o
1.50
3.
Throttle Curve Mode:
o
Off (DEFAULT)
o
Low
o
Mid
o
High
4.
Control frequency:
o
8 KHz (DEFAULT)
o
22 KHz
5.
Cutoff voltage:
1.
2,8 V/cell
2.
3,0 V/cell (DEFAULT)
3.
3,2 V/cell
4.
Off (opcjonalnie, nie w każdym regulatorze)
Cutoff mode:
0.
Soft-Cut (DEFAULT) - stopniowe obniżanie gazu do 31% gdy
napięcie spada poniżej poziomu określonego w punkcie 5.
1.
Cut-Off - natychmiastowe wyłączenie gazu
6. W elektronicznej wersji instrukcji regulatora pojawia się dodatkowy parametr (na pozycji
pierwszej):
1.
OFF (DEFAULT)
2.
Low
3.
Mid-low
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
31
Brake Type z opcjami do wyboru:
Strona
1.
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
4.
Middle
5.
Mid-high
6.
High
Konfigurowanie trybów lotu
Generalnie podręcznik on-line o ArduCopterze dzieli wszystkie tryby na podstawowe i
dodatkowe
Strona
32
http://copter.ardupilot.com/wiki/flight-modes/
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
STABILIZE - podstawowy tryb ze stabilizacją w poziomie
Operator, który od początku nastawia się na latanie dronem w trybie autopilota niejako unika
odpowiedzialności za sterowanie - a jest to obowiązek i podstawowa umiejętności pilota, aby
w sytuacjach awaryjnych samemu objąć stery i wyprowadzić kopter z niebezpieczeństwa, a
nie ratować się wtedy autopilotem.
ALT HOLD - skrót od Altitude Hold
Jak chyba łatwo się domyślić po nazwie trybu Altitude Hold włączony w trakcie lotu
spowoduje, że ArduCopter zapamięta wysokość na jakiej aktualnie znajduje się kopter i
będzie ją utrzymywał podczas lotu. Ważne aby po włączeniu trybu Alt Hold drążek gazu
utrzymywać m/w w środku, w przedziale 40-60% mocy silników - wtedy ArduCopter
zachowa ustaloną wysokość. Jednocześnie w tym trybie można wykonywać dowolnie lot w
każdym kierunku, obracać się i skręcać - nawet wznosić i opadać. W skrajnych położeniach
drążka gazu w tym trybie przy ustawieniach default'owych quadcopter będzie opadał 2,5m/s
(jeśli drążek damy całkiem w dół) lub wznosił się 2,5m/s (jeśli drążek gazu damy
w
maksymalnie
górę).
LOITER - poszerzony tryb Altitude Hold o utrzymanie pozycji GPS
LOITER to tryb lotu, w którym kopter prócz zapamiętania wysokości (przy użyciu
barometru) zapamiętuje również pozycję (przy użyciu GPS). Po przełączeniu na ten tryb dron
będzie utrzymywał się nie tylko na danej wysokości, ale
RTL - Return-To-Launch, czyli powrót do miejsca startu
Kolejny przydatny tryb lotu - po jego włączeniu kopter rozpocznie procedurę powrotu do
miejsca, w którym ArduCopter został uzbrojony oraz lądowania w tym punkcie. To oznacza,
że nasz quadcopter wraca w miejsce (zapamiętane współrzędne GPS), w którym
Strona
zapisał pozycję rysunek .
33
ArduCopter/silniki zostały uzbrojone i w którym GPS się znalazł odpowiednią ilość satelit i
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rysunek 6 Powrót drona na zapamiętaną pozycję
RTL_ALT - wysokość, na którą wzniesie się kopter przed rozpoczęciem powrotu do
domu (0 - aktualna wysokość, ustawiania: 1-8000 centymetrów, default'owa - 1500 cm)
RTL_ALT_FINAL - wysokość, na której ma się znaleźć kopter gdy dotrze nad
miejsce oznaczone jako "dom" (0 - automatyczne lądowanie po dotarciu, default - 1000 cm)
RTL_LOIT_TIME - czas zawisu, w którym kopter będzie unosił się nad "domem"
(od 0 do 60 sekund)
WP_YAW_BEHAVIOR - kontrolowanie "yaw" czyli obrotu koptera - orientacji, w
której kopter będzie leciał "do domu" (0 - bez zmiany, 1 - lot przodem w kierunku domu, 2 lot przodem po waypointach z wyjątkiem RTL - to jest opcja również dla trybu AUTO stąd
brzmi niezrozumiale)
LAND_SPEED - prędkość pionowa podczas końcowego lądowania w punkcie
oznaczonym jako "dom" (od 20 cm/s do 200cm/s)
Strona
34
AUTO - lot autonomiczny (w pełni sterowany autopilotem) po ustalonej trasie rysunek 7
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Rysunek 7 Lot drona po zaprogramowanej trasie
Testowanie quadrocoptera
Pomimo niesprzyjających warunków pogodowych (zima) udał nam się wykonać pierwsze
testowe loty dzięki którym mogliśmy wyregulować maszynę i zaznajomić się z dynamiką
sterowania i nagrywania obrazu. Do testów zmieniliśmy drogą ramę węglową na tani jej
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Strona
Zdjęcie 23 Kadr z filmu podczas testowania quadrocoptera.
35
odpowiednik wykonany z tworzywa PCV zdjęcie 23.
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Pierwsze testy okazały się a tyle trudne że zanim wyregulowaliśmy niezbędne elementy rozbiliśmy
drona uszkadzając ramię ramy. Jednak czas wylatany pozwolił nam ustawić prawidłowo silniki i
nadajnik.
Zbadanie możliwości quadrocoptera w celu poszukiwania osób
zaginionych
Pomimo braku docelowej optyki na którą obecnie oczkujemy udało nam się przeprowadzić kilka
testów dzięki którym możemy wysnuć następujące wnioski
- użycie zawansowanych maszyn latających znacząco poprawia skuteczność i szybkość pokonanej
trasy w przypadku poszukiwania osób zaginionych na terenach pozamiejskich i miejskich
- dodatkowo maszyna typu quadrocopter może penetrować miejsca trudno dostępne tam gdzie
człowiek nie może się w sposób bezpieczny udać
- należy się zastanowić nad rozwiązaniem problemu obudowania drona w taki sposób aby śmigła i
konstrukcja była chroniona na wypadek uderzenia w przeszkody
- drony świetnie mogą się nadawać nie tylko do poszukiwań ale również do patrolowania dużych
terenów. Drony wyposażone w zestawy ratunkowe mogą nieść pomoc osobą potrzebującym
- Nasz dotychczasowe testy wykazały że quadrocopter nie nadaje się do poruszania w obiektach
zamkniętych. Pojawia się problem propagacji fali radiowej oraz bez inwazyjnego poruszania się po
obiekcie
Strona
36
Wnioski jakie do tej pory udało nam się wyciągnąć pozwolą w najbliższym czasie udoskonalić naszą
maszynę wielowirnikową czyniąc ją bardziej użyteczną. Pierwszy test sprawności latania jaki jest
przed nami to impreza integracyjna impreza szkolna dla osób niepełnosprawnych która odbędzie się
maju na terenie Naszej szkoły.
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl
Człowiek – najlepsza inwestycja
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Literatura:
Strona
37
1. http://zrobsobiedrona.blogspot.com/ dostęp 01.01.2015
2. http://abc-rc.pl/ dostęp 12.12.2014
3. Pomiary automatyka robotyka 1/2014
4. hobbyking.com dostęp 20.09.2014
MODERNIZACJA KSZTAŁCENIA ZAWODOWEGO NA DOLNYM ŚLĄSKU II
Dolnośląskie Centrum Informacji Zawodowej i Doskonalenia Nauczycieli w Wałbrzychu
Rynek 6 58-300 Wałbrzych
tel.: 74-842-53-59
fax: 74 842-61-12
[email protected]
www.mkz2.walbrzych.pl