Jan Bronowicz
Dokument
Obliczeniowo-Analityczny
Strona / Stron
1/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
Analiza
w ramach realizacji Projektu „Wiatrakowiec STOL o unikalnej konstrukcji”
Projekt realizowany w ramach programu INNOTECH2, Hi-Tech,
dofinansowany przez Narodowe Centrum Badań i Rozwoju
dla
Fusioncopter Sp. z o.o.
MODEL MATEMATYCZNY DYNAMIKI WIATRAKOWCA „FUSIONCOPTER”
DO ANALIZY „MANEWRU WYRWANIA”
Opracowanie FC.w02.DOB.JBR.003.ver1
O P R A C O W A Ł:
...........................................
Jan Bronowicz
Świdnik, kwiecień 2013 r.
Jan Bronowicz
Dokument
Obliczeniowo-Analityczny
Strona / Stron
2/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
S P I S T R E Ś C I.
strona
1.0
WSTĘP
3
2.0
GŁÓWNE ZAŁOŻENIA
4
2.1
UKŁAD WSPÓŁRZĘDNYCH
4
2.2
WAŻNIEJSZE OZNACZENIA
6
3.0
RÓWNANIA RUCHU
8
4.0
OPIS MODELU
9
4.1
OPIS MODELU WIRNIKA NOŚNEGO
9
4.2
OPIS MODELU ŚMIGŁA
10
4.3
OPIS MODELU PŁATOWCA
11
5.0
SIŁY I MOMENTY WYPADKOWE
15
6.0
WYKAZ LITERATURY I MATERIAŁÓW ŹRÓDŁOWYCH
17
Jan Bronowicz
1.0
Dokument
Obliczeniowo-Analityczny
Strona / Stron
3/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
WSTĘP
Opracowanie to zawiera opis modelu matematycznego wiatrakowca przeznaczonego
do analizy i / lub symulacji manewru wyrwania. Przyjmujemy, że manewr wyrwania zostanie
zamodelowany w następujący sposób :
1. Początek manewru rozpoczyna się z lotu poziomego VH – wiatrakowiec jest rozpędzany
ze zniżaniem do zadanej prędkości wypadkowej Va. Prędkość Va nie może być
większa niż prędkość maksymalna VNE.
2. W locie silnikowym przyjmujemy, że kąt trajektorii lotu TET w czasie zniżenia jest równy –
10 stopni natomiast w locie bezsilnikowym kąt TET jest wynikowym z obliczeń
stateczności statycznej.
3. W locie silnikowym prędkość zniżania w momencie osiągnięcia prędkości Va jest równa
Va*sin(10o) natomiast w locie bezsilnikowym prędkość Vy jest wynikowa z obliczeń
stateczności statycznej.
4. Od prędkości lotu Va rozpoczyna się hamowanie prędkości poprzez zwiększenie kąta
natarcia kadłuba i wirnika i przez zwiększanie kąta TETK. Symulację wyrwania
rozpoczynamy od momentu rozpoczęcia hamowania. Warunki początkowe do
symulacji :
obroty wirnika, NR [obr/min]
kąt odchylenia osi wirnika, A1W [ o ]
kąt podłużnego położenia kadłuba, TETK [ o ]
moc niezbędna na napęd śmigieł, Ps [KW]
uzyskujemy z obliczeń stateczności statycznej (równowagi) wiatrakowca dla lotu ze
zadanym opadaniem i na zadanej prędkości lotu.
5. zwiększanie kąta natarcia wirnika i kąta natarcia kadłuba odbywa się ze stałą założoną
prędkością kątową równą 10 o/sek.
6. zwiększanie kąta natarcia wirnika i kąta natarcia kadłuba powoduje wzrost obrotów
wirnika nośnego i odbywa się do momentu gdy obroty wirnika zaczynają się
zmniejszać
7. po uzyskaniu maksymalnych obrotów wirnika następuje zmniejszenie kąta natarcia
wirnika i kadłuba i przejście do lotu poziomego.
Na podstawie poniżej opisanego modelu opracowany został program komputerowy do
symulacji manewru wyrwania wiatrakowca, który może służyć do analiz tych zagadnień w
trakcie procesu projektowania i przygotowania do prób wiatrakowca. Może również
wspomagać interpretację wyników prób w locie oraz ekstrapolować wyniki prób na inne
warunki użytkowania.
Przy opracowaniu modelu matematycznego wykorzystano doświadczenie śmigłowcowe z
tego obszaru zagadnień (starty przerwane i kontynuacja startu po awarii jednego silnika,
Jan Bronowicz
Dokument
Obliczeniowo-Analityczny
Strona / Stron
4/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
model sił od wirnika nośnego, śmigła ogonowego i płatowca do zastosowania w symulatorze
lotu śmigłowca W-3WA).
Przy tworzeniu modelu założono, że wiatrakowiec jest wyposażony w wirnik z 4
łopatami (z dwoma wirnikami dwułopatowymi typu „huśtawka” . Każdy wirnik posiada jeden
przegub wahań umieszczony w środku piasty, i posiada stały kąt skoku ogólnego wirnika).
W związku z powyższym metodyka obliczeń sił i momentów dotyczy tego typu wirnika.
2.0 GŁÓWNE ZAŁOŻENIA
-
Przy tworzeniu modelu przyjęto następujące założenia :
siły i momenty od wirnika nośnego, śmigła i płatowca nie zależą od czasu i nie zależą od
historii ruchu. Są traktowane jako siły quasistacjonarne. Zależą od parametrów ruchu i
parametrów sterowania wiatrakowcem, które istnieją w danej chwili czasowej tzn. w takiej
chwili, dla której wyznaczamy te siły.
-
Przy wyznaczaniu sił od wirnika stosujemy metodę całkowania sił po długości łopaty i po
azymucie z jednoczesnym rozwiązywaniem równania wahań pionowych łopat.
Współczynniki aerodynamiczne profilu łopaty są zależne od kąta natarcia i liczby Macha
– zastosowana jest stacjonarna aerodynamika nieliniowa.
-
Siły od śmigła są wyznaczone na podstawie teorii strumieniowej i aerodynamiki
stacjonarnej.
-
Siły i momenty działające na kadłub są przyjęte na podstawie charakterystyk
aerodynamicznych uzyskanych w obliczeniach programem FLUENT. Zakres kątów
natarcia i kątów ślizgu płatowca w obliczeniach jest mniejszy niż wymagany do modelu.
Dlatego charakterystyki aerodynamiczne płatowca zostały ekstrapolowane na zakresy
kątów wymaganych w modelu.
-
Wpływ wirnika na usterzenie oraz wpływ śmigła na usterzenie zostały uwzględnione.
-
Przyśpieszeń liniowych jak i przyśpieszeń kątowych w siłach od wirnika nośnego, śmigła i
płatowca nie uwzględniono.
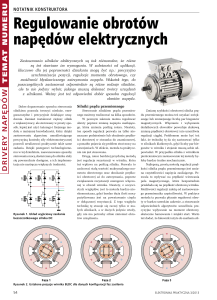
2.1. UKŁAD WSPÓŁRZĘDNYCH
W opracowaniu został przyjęty prostokątny, prawoskrętny układ współrzędnych związany z
wiatrakowcem (rys. 1).
Układ jest zaczepiony w środku ciężkości wiatrakowca i
przemieszcza i obraca się w przestrzeni łącznie z wiatrakowcem. Oś X jest skierowana do
przodu i jest równoległa do płaszczyzny bazowej wiatrakowca. Oś Z jest prostopadła do
płaszczyzny symetrii wiatrakowca i jest skierowana w prawo (patrząc w kierunku lotu
wiatrakowca). Oś Y uzupełnia układ do prawoskrętnego i jest skierowana do góry.
Użycie takiego układu osi powoduje, że człony inercyjne w równaniach ruchu są stałe
(niezależne od warunków lotu). Co więcej, jeśli jedna z osi pokryłaby się z osią główną
centralną wiatrakowca, wówczas momenty dewiacyjne byłyby równe zeru.
Strona / Stron
5/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
Dokument
Obliczeniowo-Analityczny
Jan Bronowicz
Siły i momenty aerodynamiczne w tym układzie współrzędnych będą zależały od
kierunku prędkości napływu na elementy wiatrakowca. Kierunek napływu na wiatrakowiec
będzie zdefiniowany przez kąt natarcia i kąt ślizgu .
Yb
Z
My
X
Mx
Mz
SC
Xb
TsP
Xb
SC
TsL
Zb
Rys.1. Układ osi współrzędnych bazowy (z indeksem b) i związany z wiatrakowcem.
Jan Bronowicz
Dokument
Obliczeniowo-Analityczny
Strona / Stron
6/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
2.2. WAŻNIEJSZE OZNACZENIA
VX, VY, VZ [m/s]
– składowe prędkości lotu w układzie związanym z ziemią,
OX, OY, OZ [rad/s] – składowe wektora prędkości kątowych kadłuba w układzie związanym
z wiatrakowcem,
FI [stop]
– kąt skoku ogólnego wirnika,
A1W [stop]
– kąt pochylenia osi wirnika zadawany przez pilota, dodatni, gdy drążek
„na siebie”,
– kąt przechylenia osi wirnika zadawany przez pilota, dodatni, gdy
B1W [stop]
drążek „w prawo”,
3
RG [kg/m ]
– gęstość powietrza w warunkach lotu,
TH [0 C]
– temperatura powietrza w warunkach lotu,
HK [m]
– odległość środka piasty wirnika od ziemi, gdy wiatrakowiec znajduje się
na ziemi,
FX, FY, FZ [N]
– składowe wektora sumy sił w układzie związanym z wiatrakowcem od
wirnika nośnego, śmigła i płatowca,
MX, MY, MZ [Nm] – składowe wektora sumy momentów w układzie związanym z
wiatrakowcem od wirnika nośnego, śmigła i płatowca,
Powyższe oznaczenia są takie same jak parametry formalne procedury obliczającej siły
działające na wiatrakowiec. Poniżej przedstawiono ważniejsze oznaczenie przyjęte w opisie
modelu :
Rw [m]
- promień wirnika nośnego,
Rs [m]
- promień śmigła,
s,h,t
- współczynniki sił wirnika w układzie prędkościowym,
S, H, T [N] - siły wirnika w układzie prędkościowym, (S>0 w prawo, H>0 do tyłu,
T>0 do góry),
x,
y,
z [rad/s] - prędkości kątowe wiatrakowca, (dodatnie, gdy powodują obrót w prawo
przy widoku ze środka układu współrzędnych),
k
[rad]
- kąt natarcia kadłuba,
w
[rad]
- kąt ślizgu wirnika, (dodatni, gdy napływ z prawej strony),
k
[rad]
- kąt ślizgu kadłuba, (dodatni, gdy napływ z prawej strony),
kH [-]
,
[-]
- kompensator wahań łopaty wirnika nośnego,
- współczynniki przepływu i napływu na wirnik
B [-]
- współczynnik strat końcowych łopaty,
Sph [kgm]
- moment statyczny łopaty względem przegubu poziomego,
Jan Bronowicz
Iph [kgm2]
[rad/s]
s [rad/s]
[-]
Dokument
Obliczeniowo-Analityczny
Strona / Stron
7/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
- moment bezwładności łopaty względem przegubu poziomego,
- prędkość obrotowa wirnika nośnego,
- prędkość obrotowa śmigła,
- wypełnienie tarczy wirnika,
c [m]
- cięciwa łopaty na 0.7 promienia wirnika,
a [ -]
- gradient siły nośnej profilu łopaty wirnika po kącie natarcia,
ad [m/s]
- prędkość dźwięku w powietrzu,
XT [m]
- podłużna współrzędna środka ciężkości wiatrakowca w bazowym
układzie współrzędnych,
- pionowa współrzędna środka ciężkości wiatrakowca w bazowym
układzie współrzędnych,
- boczna współrzędna środka ciężkości wiatrakowca w bazowym
układzie współrzędnych,
- podłużna współrzędna środka parcia usterzenia w bazowym układzie
współrzędnych,
YT [m]
ZT [m]
XSP [m]
YSP [m]
- pionowa współrzędna środka parcia usterzenia w bazowym układzie
współrzędnych,
XW [m]
- podłużna współrzędna środka piasty wirnika przy zerowym
zasterowaniu w bazowym układzie współrzędnych,
- pionowa współrzędna środka piasty wirnika przy zerowym
zasterowaniu w bazowym układzie współrzędnych,
- podłużna współrzędna środka piasty śmigła w bazowym układzie
współrzędnych,
YW [m]
XS [m]
YS [m]
- pionowa współrzędna środka piasty śmigła w bazowym układzie
współrzędnych,
sp
[deg]
- kąt nastawienia statecznika poziomego mierzony względem poziomej
płaszczyzny bazowej, dodatni, gdy krawędź natarcia do góry,
H
[deg]
w
[deg]
s
[deg]
- kąt nastawienia statecznika pionowego mierzony względem pionowej
płaszczyzny symetrii, dodatni, gdy krawędź natarcia odchylona w prawą
stronę,
- kąt pomiędzy osią wirnika nośnego przy zerowym zasterowaniu a
prostopadłą do płaszczyzny bazowej, dodatni, gdy oś wirnika odchylona
do tyłu,
- kąt pomiędzy osią śmigła a osią OX bazowego układu współrzędnych,
dodatni, gdy oś wirnika odchylona do góry,
4
a cRw
[-]
2 Iph
- charakterystyka masowa łopaty wirnika nośnego.
Jan Bronowicz
Dokument
Obliczeniowo-Analityczny
Strona / Stron
8/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
3.0 RÓWNANIA RUCHU
Równania ruchu prezentowane poniżej dotyczą płaskiego ruchu wiatrakowca (w płaszczyźnie
pionowej) w układzie osi współrzędnych „ziemskich”
– oś OY jest pionową osią, dodatnia wartość do góry
– oś OX jest poziomą osią, dodatnia do przodu w kierunku lotu wiatrakowca.
Analiza tutaj prezentowana dotyczy wiatrakowca następującymi komponentami :
a) pojedynczy wirnik nośny
b) śmigło / śmigła ciągnące lub pchające
c) kadłub
d) usterzenie poziome (ster wysokości)
e) usterzenie pionowe (ster kierunku)
Zakładamy, że sterowanie wirnikiem obywa się za pomocą pochylania i przechylania
osi wirnika.
Sterowanie pochylaniem ogranicza się w zasadzie do korygowania kąta pochylenia
kadłuba poprzez zmianę kąta nastawienia steru wysokości.
Sterowanie kierunkowe polega na zmianie kąta nastawienia obu płatów steru
kierunku.
Sterowanie śmigłem polega na zmianie ciągu śmigła poprzez zmianę mocy dostarczanej do
śmigła (zakładamy tutaj, że śmigło ma stałe obroty).
Równania ruchu ciała sztywnego w przestrzeniu można znaleźć w książkach dotyczących
dynamiki statków powietrznych. Poniżej przytaczamy równania.
X
M
(
V
x
Vy
z
)
Y
M
(
V
y
Vx
z
)
0
Iw
Myw
gdzie :
M – masa wiatrakowca
Iw – moment bezwładności wirnika nośnego względem jego osi obrotu
Myw – moment oporowy wirnika nośnego
– prędkość kątowa wirnika nośnego
X Fxmg
Y Fymg
Fx, Fy– siły pochodzące od wirnika, śmigła i płatowca z usterzeniem.
Powyższy układ równań jest układem 3-ch równań różniczkowych pierwszego rzędu, którego
rozwiązaniem są Vx(t), Vy(t), (t).
Układ ten możemy rozwiązać numerycznie z warunkiem początkowym dla t=0 Vx(0)=Vx0,
Vy(0)=Vy0, (0)= 0.
Jan Bronowicz
Strona / Stron
9/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
Dokument
Obliczeniowo-Analityczny
W równaniach występują siły i momenty działające na wiatrakowiec, które są funkcjami
zarówno rozwiązań powyższych równań jak i funkcjami parametrów sterowania.
Poniżej zostaną opisane metody wyznaczania sił i momentów.
4.0
OPIS MODELU
Jak wspomniano powyżej, opracowanie to obejmuje opis modelu sił od wirnika, od
śmigła, od płatowca i w takiej kolejności modele zostaną opisane.
4.1 OPIS MODELU WIRNIKA NOŚNEGO
Przy wyznaczeniu sił od wirnika nośnego posłużono się teorią elementu łopaty z
aerodynamiką nieliniową. Siły wirnika nośnego wyznacza się numerycznie metodą
całkowania sił elementarnych łopaty z jednoczesnym rozwiązywanie równania wahań
pionowych łopat wirnika. Siły wirnika wyznacza się w układzie osi współrzędnych związanych
z wirnikiem. Siły i momenty od wirnika nośnego będziemy wyznaczać w układzie osi
współrzędnych „wirnikowych” , a następnie transformować je do układu związanego z
wiatrakowcem. Układ osi „wirnikowy” zaczepiony jest w środku piasty. Oś „Xw” skierowana
jest do przodu (leży w płaszczyźnie symetrii wiatrakowca) i jest prostopadła do osi wału
wirnika. Oś „Yw” pokrywa się z osią wału wirnika i jest skierowana do góry. Oś „Zw”jest
prostopadła do płaszczyzny symetrii wiatrakowca i jest skierowana w prawo.
„Wirnikowy” układ osi współrzędnych jest obrócony o kąt (
w
+A1W) względem osi OZ.
Składowe prędkości liniowych w układzie wirnikowym wyrażają się wzorami :
Vxw=(Vx*cos( w+A1W)+Vy*sin( w+A1W)Vyw= (Vx* sin( w+A1W)-Vy*cos( w+A1W)-
zw*(YW-YT)
zw*(XW-XT)
2
2
VwV
xw V
yw
Kąt natarcia wirnika wynosi :
Vyw
ar
ctg(
)
2
2
Vxw
Vyw
w
Powyższe parametry pozwalają na wyznaczenie sił na wirniku :
TW, HW,MYW.
W celu uwzględnienia wpływu ziemi siły TW i HW są mnożone przez współczynnik wpływu
ziemi wpz. Współczynnik ten jest zależny od względnej wysokości wirnika nad ziemią
(ekranem) oraz od względnej składowej prędkości napływu na wirnik równoległej do ziemi
(ekranu). Dane wpływu ziemi są uzyskane z prób w locie śmigłowców i zawarte są w tabeli
dwuwymiarowej. Wysokość względna jest wysokością wirnika nad ziemią odniesioną do
promienia wirnika a prędkość względna jest prędkością lotu odniesioną do prędkości
indukowanej wirnika przy zerowej prędkości lotu (w „zawisie”) bez wpływu ziemi.
Dokument
Obliczeniowo-Analityczny
Jan Bronowicz
Strona / Stron
10/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
Jeżeli względna składowa prędkości napływu na wirnik jest większa od 3 lub względna
wysokość wirnika nad ekranem jest większa od 2 to współczynnik wpz =1.0 (brak wpływu
ziemi). W przeciwnym przypadku współczynnik wpz jest wyznaczany z tablicy zawierającej
współczynniki wpływu metodą interpolacji liniowej po dwóch zmiennych :
HPW
HK HKP
RW
VFAL
Vx2 Vz2
v0
Wyrażenie na moment obrotowy będzie występować tylko w równaniu na obroty wirnika.
Przechodząc teraz do układu związanego z wiatrakowcem ostatecznie otrzymamy :
Fxwn
Xw
*
cos(
w
A
1
W
)
Yw
*
sin(
w
A
1
W
)
Fywn
Yw
*
cos(
w
A
1
W
)
Xw
*
sin(
w
A
1
W
)
4.2
OPIS MODELU ŚMIGŁA
Przy wyznaczeniu sił od śmigła posłużono się teorią strumieniową. Zakładamy, że
śmigło pracuje w opływie osiowym i wytwarza ciąg Ts oraz moment oporowy Mrs. Wielkość
mocy dostarczanej do śmigła jest zadawana przez pilota wiatrakowca.
Składowe prędkości napływu na śmigło wyrażą się wzorami :
Vxs=Vx-
z*(YS-YT)
Vys=Vy+
z
*(XS-YT)
Vzs= Vz-
y
* (XS-XT)
2
2
2
Vs
(
Vxs
Vys
Vzs
)
Zakładamy, że do śmigła dostarczana jest moc Ps.
Moc indukowana pobierana przez śmigło będzie różnicą mocy dostarczanej i mocy profilowej
śmigła :
Pind = Ps – Pprof
Pprof=0.0027*(1.0+5.0*(VS/UKS)**2) *0.5*RG*SGS*PI*RWS*RWS*UKS*UKS*UKS
Jeśli mamy obliczoną moc indukowaną, to ciąg śmigła Ts wyznaczymy w pętli iteracyjnej wg
wzoru :
Ts
i 1
Pind
2
Vs
Vs
Ts
i
1
.
15
)
2
2 42
Rs
Wystarczy kilka cykli do wyznaczenia ciągu śmigła.
Pętle kończymy, gdy abs(Tsi+1- Tsi)< .
Jan Bronowicz
Dokument
Obliczeniowo-Analityczny
Strona / Stron
11/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
Mrs=(PIND+PPS)/OMS
gdzie :
UKS – prędkość końca łopaty śmigła
RWS – promień śmigła
SGS – wypełnienie tarczy śmigła
OMS – prędkość kątowa obrotów śmigła
Moment oporowy śmigła jest sumą składowych pochodzących od mocy profilowej i od mocy
indukowanej.
Występujący w powyższym wzorze współczynnik 1.15 jest poprawką na rozkład prędkości
indukowanej na tarczy śmigła.
Przechodząc do układu związanego z wiatrakowcem ostatecznie otrzymamy :
FxsTs
*cos(
s)
FysTs
*sin(
s)
Fzs0
Mxs P*Mrs
Mys0
MzsFys
*(XS XT
) Fxs
*(YSYT
)
Wielkość P jest zależna od obrotów śmigła i ma wartość +1 lub –1. P jest równe +1, gdy
obroty śmigła są zgodne z ruchem wskazówek zegara przy widoku na śmigło z tyłu
wiatrakowca w kierunku lotu.
Kąt
s
jest kątem pomiędzy osią śmigła a osią OX układu związanego z wiatrakowcem.
4.3 OPIS MODELU PŁATOWCA
Przy wyznaczeniu sił i momentów od płatowca podstawą są charakterystyki
aerodynamiczne kadłuba z usterzeniem przy kącie nastawienia sp=0 st., kątach steru
kierunku HL= HP= 0 st. oraz charakterystyki aerodynamiczne usterzenia. Charakterystyki
aerodynamiczne płatowca i charakterystyki aerodynamiczne usterzenia wyznaczono w
oparciu o obliczenia opływu wykonane programem FLUENT na Politechnice Lubelskiej.
Zakres kątów natarcia i kątów ślizgu płatowca w obliczeniach jest mniejszy niż wymagany do
modelu. Dlatego charakterystyki aerodynamiczne płatowca zostały ekstrapolowane na
zakresy kątów wymaganych w modelu. Charakterystyki te zawarte są w następujących
tabelach :
-
CXK
– współczynniki oporu płatowca dla kąta ślizgu
-
CYK
– współczynniki siły nośnej płatowca dla kąta ślizgu
-
AMZK
– współczynniki momentu płatowca dla kąta ślizgu
-
DALSP
– kąty skosu strumienia na usterzeniu od kadłuba,
-
ALK
– kąty natarcia płatowca, dla których podano powyższe cztery charakterystyki,
k=0,
k=0,
k=0,
Jan Bronowicz
Dokument
Obliczeniowo-Analityczny
Strona / Stron
12/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
-
CYSP
– współczynniki siły nośnej usterzenia (prostopadłej do poziomej płaszczyzny
bazowej wiatrakowca),
-
ALSP
– kąty natarcia usterzenia, dla których podano współczynniki siły nośnej,
prostopadłej do poziomej płaszczyzny bazowej wiatrakowca.
Współczynniki siły oporu i siły nośnej i momentu pochylającego płatowca są podane w
układzie prędkościowym. Charakterystyki w tabelach są podane w układzie współrzędnych
związanym z wiatrakowcem: oś OX skierowana do przodu i jest równoległa do poziomej
bazowej, oś OY skierowana do góry i jest prostopadła do poziomej bazowej, oś OZ
skierowana w prawo. Kąt ślizgu K jest dodatni, gdy napływ na kadłub jest z prawej strony.
Początek układu współrzędnych przyjęty w obliczeniach opływu był położony w pobliżu
środka ciężkości wiatrakowca. W modelu przyjmujemy, że początek układu przyjęty w
obliczeniach opływu pokrywa się z początkiem układu związanego z wiatrakowcem. Poniżej
współczynniki sił i współczynniki momentów na podstawie obliczeń opływu będą wyrażane w
powyżej opisanym układzie osi współrzędnych a następnie transformowane do układu
związanego i przyjętego w modelu dynamiki.
Kąt natarcia i kąt ślizgu płatowca określamy wg poniższych zależności :
k
Vy
ar
ctg
Vx
k
Vz
ar
ctg
Vx
W modelu uwzględnia się moment pochylający kadłuba będący wynikiem odmuchu kadłuba
przez wirnik :
2
Mzpind
mzind
*
0
.
5
F
*
Rw
*
v
i*
k
ind
gdzie: mzind – współczynnik momentu pochylającego kadłub od odmuchu wirnikiem,
mzind=0.032208 był uzyskany na podstawie analiz i badań tunelowych kadłubów
śmigłowców z nadmuchem wirnika i dla wiatrakowca Fusioncopter przyjmujemy tę
samą wartość.
kind
- współczynnik uwzględniający rozkład prędkości od prędkosci lotu,
kind=0.5+400*Vk2 dla Vk=Vw/( Rw)
0.05
kind=1.5 – 0.5*sin[10*(Vk – 0.05)* ] dla
0.05 <Vk
0.10
kind=1.0 dla Vk > 0.1
Mając kąt natarcia K wyznaczamy z tablic CXK i CYK współczynniki siły oporu cxk0 i siły
nośnej płatowca cyk0 w układzie prędkościowym dla K=0.Współczynniki te poprawiamy dla
K różnego od zera i wyznaczamy siłę oporu i siłę nośną w układzie prędkościowym wg
wzorów :
c 0
.035
*k2
c
yk c
yk
0 0
.004
*k
Cxkxk
0
gdzie cxk0 i cyk0 są współczynnikami oporu i siły nośnej płatowca przy
2
2
2
2
V
Vx
Vy
Vz
k
=0.
Dokument
Obliczeniowo-Analityczny
Jan Bronowicz
Strona / Stron
13/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
1 2
Xp V
F
[
c
xk
cos(
k
)c
yk
sin(
k
)]
2
1 2
Yp V
F
[
c
yk
cos(
k
)c
xk
sin(
k
)]
2
Siła boczna płatowca Zp wyznaczona jest w układzie związanym z płatowcem, której
współczynnik czk określa się metodą interpolacji liniowej po dwóch zmiennych k i k dla
danych zawartych w tabeli ACZK oblicza się wg poniższego wzoru :
1 2
Zp V
Fc
zk
2
Przy obliczeniach momentu pochylającego płatowca stosujemy następujący sposób
postępowania :
-
obliczamy najpierw moment pochylający kadłuba:
z tablicy AMZK dla kąta natarcia kadłuba
pochylającego kadłub mzk0 przy przy
k
k
wyznaczamy współczynnik momentu
=0,
z tablicy DAMZK dla kąta natarcia kadłuba
ki
kąta ślizgu
k
wyznaczamy
przyrost współczynnika momentu pochylającego kadłub mzk,
obliczamy moment aerodynamiczny pochylający kadłub :
1 2 2 2
M
zk
Vx
Vy
Vz
F
Rw
(
m
zk
0m
zk
)
2
-
obliczamy przyrosty sił i momentów od usterzenia :
ponieważ siły i momenty płatowca zostały wyznaczone dla sp=0 st., a faktyczny kąt sp=+3
st., to w sile nośnej usterzenia ten fakt należy uwzględnić. Podobnie należy uwzględnić
wpływ wirnika na siły na usterzeniu. Prędkość napływu strumienia od wirnika nośnego na
usterzenie wyznaczamy wg zależności :
Vyw
2vi
c
gdzie: vi oznacza prędkość indukowaną w płaszczyźnie wirnika,
c oznacza współczynnik uwzględniający zmianę prędkości indukowanej
wirnikiem w zależności od odległości statecznika poziomego od płaszczyzny
wirowej spływającej z wirnika. Odległość ta wyraża się następującym wzorem :
Y=((YW-YSP)+(XW-XSP)*SIN( k))/RW
W ostatnim wzorze XSP, YSP oznacza współrzędne środka parcia usterzenia.
Współczynnik c wyznaczamy metodą interpolacji z tablicy KAPCO zawierającej
współczynniki indukcji w zależności od bezwymiarowej odległości płaszczyzny wirowej
wirnika od punktu, dla którego określana jest prędkość indukowana wirnikiem. Odległości, dla
których podano współczynniki indukcji zawiera tablica YKAP. Dane dotyczące indukcji
wirnika na elementy płatowca przyjęto za literaturą [1].
Wtedy prędkość napływu na usterzenie wynosi :
2
2 2
V
V
x(
V
y V
yw
z
(
XSP
XT
))
V
z
Dokument
Obliczeniowo-Analityczny
Jan Bronowicz
Strona / Stron
14/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
A kąt napływu z uwzględnieniem prędkości indukowanej od wirnika nośnego jest równy :
V
y V
yw
z
(
XSP
XT
)
ar
ctg(
)
V
x
k
1
Strumień powietrza napływający na usterzenie jest dodatkowo odchylany z powodu
oddziaływania śmigła. Wpływ śmigła na usterzenie przyjmiemy poprzez sumowanie
geometryczne podwojonej prędkości indukowanej śmigła i prędkości napływu
niezaburzonego strumienia (z uwzględnieniem prędkości indukowanej wirnika nośnego).
Wtedy prędkość napływu na statecznik wyrazi się wzorem:
2 2
Vsp
4
v
s V
2
V
v
s
cos(
k
1s
)
A kąt skosu od śmigła na statecznik poziomy obliczamy za pomocą wzoru :
2
vs
arc
sin[
sin(
k
1s
)]
Vsp
sp
gdzie vs –oznacza prędkość indukowaną śmigła w płaszczyźnie obrotów śmigła.
Wzór ostatni wyraża kąt jaki tworzy suma geometryczna podwojonej prędkości indukowanej
śmigła i prędkości strumienia niezaburzonego z prędkością napływu niezaburzonego.
Kąt natarcia usterzenia w locie będzie równy :
sp= k1 + sp-
gdzie
spk
sps-
spk,
– kąt skosu strumienia na usterzeniu od kadłuba.
W celu uwzględnienia kąta ślizgu stosujemy następujący wzór:
2k
sp sp
*
(
1
.0
)
Z charakterystyki usterzenia wyznaczamy wartość współczynnika siły nośnej usterzenia cyl
dla kąta natarcia w locie sp i pionowa siła nośna statecznika poziomego w locie wyrazi się
wzorem :
1
2
Ysp c
yl
V
spSsp
2
Przyrost siły bocznej statecznika pionowego możemy wyrazić wzorem :
1
2
ZspaH
V
sp
Ssp
2
Przyrost oporu można wyrazić wzorem :
2
1 c
yl
2
Xsp
V
spSsp
2
gdzie oznacza wydłużenie usterzenia.
Przyrosty momentów od usterzenia wyrażają się wzorami:
Jan Bronowicz
Dokument
Obliczeniowo-Analityczny
Strona / Stron
15/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
Mzsp
Ysp
(
XSP
XT
) Xsp
(
YSP
YT
)
cos(
k
)
Mxsp
Zsp
*
(
YSP
YT
)
cos(
k
)
Mysp
Zsp
*
(
XSP
XT
)
cos(
k
)
Moment przechylający płatowca Mxpl wyznaczamy w ten sposób, że z tablicy AMXK
wyznaczamy współczynnik momentu przechylającego m xk dla danych k i k , a następnie
moment przechylający :
1
2 2 2
Mxp
m
sxpl
(
Vx
Vy
Vz
)
F
Rw
2
Moment odchylający płatowca Mypl wyznaczamy w ten sposób, że z tablicy AMYK
wyznaczamy współczynnik momentu odchylającego m yk dla danych k i k , a następnie
moment odchylający :
1
2
2 2
Myp
m
ypl
(
Vx
Vy
Vz
)
F
Rw
2
W układzie związanym siły i momenty od płatowca wyrażają się następującymi
zależnościami :
Fxpl
(
Xp
Xsp
)cos(
k
)
Fypl
Yp
Ysp
Fzpl
Xp
sin(
k
) Zp
Zsp
cos(
k
)
Mxpl
Mxp
(
Mzk
Mzsp
)sin(
k
)
Mzpl
Mzpind
(
Mzk
Mzsp
)cos(
k
)
Mypl
Myp
PMysp
Gdy wirnik nośny nie jest napędzany przez silnik to Myp=0.0
5.0 SIŁY I MOMENTY WYPADKOWE
Siły i momenty wypadkowe działające na kadłub i wyrażone w układzie
związanym z kadłubem są sumą sił i momentów od wirnika nośnego , śmigła i
płatowca :
Jan Bronowicz
Fx
Fy
Fz
Mx
My
Mz
Dokument
Obliczeniowo-Analityczny
Strona / Stron
16/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
Fxwn Fxs Fxpl
Fywn Fys Fypl
Fzwn Fzs Fzpl
Mxwn Mxs Mxpl
Mywn Mys Mypl
Mzwn Mzs Mzpl
Do całkowania równań ruchu wiatrakowca w układzie ziemskim siły i momenty wirnika,
płatowca i śmigła są transformowane do układu ziemskiego.
W ruchu płakim opisanym równaniami zapisanymi powyżej (pkt.5) występują sumaryczne
siły Fx, Fy, oraz moment obrotowy wirnika Mywn. Dla ruchu płaskiego transformacja ma
postać:
FXWN=XWN*COS(EPSW+TETK)-YWN*SIN(EPSW+TETK)
FYWN=YWN*COS(EPSW+TETK)+XWN*SIN(EPSW+TETK)
FXS=TS*COS(EPSS+TETK)
FYS=TS*SIN(EPSS+TETK)
FXXPL=-XK*COS(ALK1/WS)+YK*SIN(ALK1/WS)
FYYPL=YK*COS(ALK1/WS)+XK*SIN(ALK1/WS)
FXPL=FXXPL*COS(TETK)-FYYPL*SIN(TETK)
FYPL=FYYPL*COS(TETK)-FXXPL*SIN(TETK)
MY=MYWN
Jan Bronowicz
Dokument
Obliczeniowo-Analityczny
Strona / Stron
17/17
Indeks strony
A
Dokument nr
FC.w02.DOB.JBR.003.ver1
6. WYKAZ LITERATURY I MATERIAŁÓW ŹRÓDŁOWYCH
[ 1 ] – A. S. Brawerman, D. M. Perlsztejn, S. W. Lapisowa –Balansirowka odnowintowogo
wertoleta – 1975 – Maszinostrojenie
[ 2 ] – M. L. Mill i inni – Wertolety – 1966 – Maszinostrojenie
[ 3 ] – J. Bronowicz – Stateczność i sterowność wiatrakowca - opracowanie nr JB-1/2012/L
[ 4 ] – E. Kisielowski, A. A. Perlmutter, J. Tang –Stability and Control Handbook for
Helicopters – Virginia 1967
[ 5 ] – S. J. Esaułow, O. P. Bachow, I. S. Dmitriew – Wertolet kak objekt uprawlenia –
Moskwa 1977
[ 6 ] – A. S. Brawerman. A. P. Wajntrub – Dinamika wertoleta – Moskwa 1988
[ 7 ] – J. Bronowicz – Program komputerowy obliczenia stateczności statycznej wiatrakowca
(wirnik typu wahliwego –„huśtawka” bez cyklicznego sterowania i o stałym kącie
nastawienia łopat, statecznik poziomy sprzężony z pochylaniem osi wirnika)”. opracowanie nr JB-3/2012/L. Nazwa programu : P2S.EXE
[8] – J. Bronowicz – Stateczność dynamiczna wiatrakowca – opracowanie nr JB-19/2011/1
[9] – Raport z analiz numerycznych geometrii kadłuba wiatrakowca w wersji m1-2_2.