Serwonapędy w automatyce i robotyce
Wykład 10
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
Urządzenia energoelektroniczne
Urządzenia energoelektroniczne poprzez regulację
napięcia , prądu i częstotliwości umoŜliwiają
bezstopniową regulacji wielkości fizycznych, np.
◦ prędkości obrotowej,
◦ momentu obrotowego.
W tym celu energia sieci zasilającej przekształcana jest
w urządzeniu energoelektronicznym, a następnie zostaje
doprowadzona do urządzenia odbiorczego (silnika).
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
2
Urządzenia energoelektroniczne
Styczniki półprzewodnikowe
Styczniki półprzewodnikowe umoŜliwiają szybkie i
bezgłośne załączanie trójfazowych silników prądu
przemiennego i obciąŜeń rezystancyjnych. Włączanie
następuje automatycznie do optymalnego punktu
czasowego eliminując tym samym niepoŜądane
szczytowe wartości prądu.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
3
Urządzenia energoelektroniczne
Układy łagodnego rozruchu Sterują one napięciem
sieciowym regulując jego wartość od ustawialnej
wartości początkowej do 100%. Dzięki temu następuje
łagodny rozruch silnika.
W porównaniu do normalnego momentu
rozruchowego silnika, redukcja napięcia prowadzi do
obniŜenia momentu w silniku proporcjonalnie do
kwadratu napięcia.
Softstartery nadają się szczególnie do rozruchu
obciąŜeń o kwadratowym przebiegu momentu w funkcji
prędkości obrotowej (np. pompy albo wentylatory).
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
4
Urządzenia energoelektroniczne
Przemienniki częstotliwości Przemienniki
częstotliwości wykorzystując sieć 1- lub 3-fazową prąd
przemiennego o stałej wartości napięcia i częstotliwości
tworzą nową sieć prądu przemiennego o regulowanej
wartości napięcia i częstotliwości z której zasilany jest
silnik.
Sterowanie napięciem i częstotliwością umoŜliwia
bezstopniową regulację prędkości obrotowej silników
trójfazowych.
Dzięki temu napęd moŜe być uruchomiony ze
znamionowym momentem równieŜ przy niewielkich
prędkościach obrotowych.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
5
Urządzenia energoelektroniczne
o sterowaniu skalarnym (konwencjonalne) - w
rozwiązaniu tym utrzymywany jest stały stosunek
pomiędzy napięciem wejściowym do falownika U, a
częstotliwością wyjściową f.
Stosowane są one w układach, gdzie nie wymaga się
duŜej precyzji kąta oraz mamy do czynienia z niewielką
dynamiką (pompy, wentylatory, podajniki),
o sterowaniu wektorowym (strumienia i
ewentualnie momentu) - cechuje je duŜa precyzja,
doskonała dynamika i sukcesywnie wypierają one
napędy prądu stałego. W wektorowym przemienniku
częstotliwości regulacja następuje dzięki pozbawionej
czujników regulacji pola elektromagnetycznego w
silniku.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
6
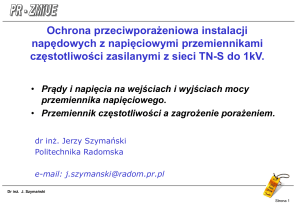
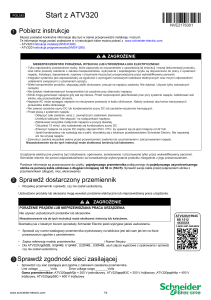
Przemienniki częstotliwości
Budowa
1 – Prostownik
2 – Obwód pośredni
napięcia stałego
3 – Falownik
4 – Układ
sterowania
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
7
Przemienniki częstotliwości
Przemiennik częstotliwości przekształca trójfazowe
(jednofazowe) zmienne napięcie sieciowe o stałej
częstotliwość w napięcie stałe (prostownik).
Napięcie stałe słuŜy do wytworzenia trójfazowej sieci o
zmiennym napięciu i zmiennej częstotliwości
(falownik).
Przemiennik częstotliwości pobiera z sieci zasilającej
praktycznie tylko moc czynną (cosφ ~ 1).
Obwód pośredni napięcia stałego - dostarcza moc
bierną
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
8
Przemienniki częstotliwości
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
9
Przemienniki częstotliwości
Moment obrotowy M rozwijany przez silnik
asynchroniczny jest proporcjonalny do prądu IW i
strumienia ϕ:
M ≈ φ × IW
Do optymalizacji momentu obrotowego silnika,
strumień magnetyczny w szczelinie powietrznej silnika
musi być utrzymany na stałym poziomie.
φ≈
U
f
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
10
Przemienniki częstotliwości
Kiedy silnik jest obciążony i pracuje w zakresie małych prędkości
– f < 10Hz, występuje duży spadek napięcia na rezystancji
uzwojeń stojana.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
11
Przemienniki częstotliwości
Przykład.
Silnik o mocy P=1,1kW, napięciu nominalnym U=3×400V
f=50Hz o rezystancji uzwojenia stojana R (jednej fazy)
wynoszącej około 8 Ω, pobiera prąd 3A przy nominalnym
obciąŜeniu. Spadek napięcia na rezystancji uzwojenia stojana
w tym przypadku wynosi 24V.
Napięcie ok. 40V przy 5 Hz jest odpowiednim napięciem do
sterowania silnika wg charakterystyki U/f. Jeśli obciąŜymy
silnik nominalnie i pobierze on prąd do 3A, wtedy napięcie o
wartości około 24V powoduje jedynie powstawanie strat.
WaŜne jest, Ŝe tylko napięcie o wartości 16V jest
wykorzystywane do magnesowania silnika.
Gdy silnik jest niedomagnesowany to wytwarza mniejszy
moment napędowy.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
12
Przemienniki częstotliwości
Aby utrzymać stały strumień, silnika spadek napięcia na
rezystancji uzwojeń silnika musi być kompensowany:
◦ zwiększenie napięcia wyjściowego przemiennika
częstotliwości w zakresie małych prędkości silnika przez
wykorzystanie otwartej pętli sterowania.
◦ regulacja napięcia wyjściowego przemiennika
częstotliwości poprzez wykorzystanie oddziaływania na
wartość składowej czynnej prądu wyjściowego
przemiennika.
Określenia:
◦
◦
◦
◦
kompensacja I x R,
podbicie napięcia (ang. boost),
zwiększenie momentu (ang. torque raising),
kompensacja startu (ang. start compensation).
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
13
Przemienniki częstotliwości
Przemienniki częstotliwości automatycznie kontrolują
parametry kompensacyjne na podstawie częstotliwości,
napięcia i prądu silnika.
Parametry kompensacyjne umoŜliwiają zapewnienie
optymalnego magnesowania i tym samym maksymalnego
momentu, zarówno przy starcie silnika jak i od małych
do maksymalnie dopuszczalnych prędkości silnika.
Napięcie przemiennika otrzymuje odpowiednie napięcie
dodatkowe, które efektywnie kompensuje wpływ
spadku napięcia na rezystancji uzwojeń przy niskich
częstotliwościach
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
14
Przemienniki częstotliwości
ZaleŜne od obciąŜenia parametry wpływające na
wartość napięcia dodatkowego napięcia kompensacji start i kompensacja poślizgu, zaleŜą od dokładności
pomiaru prądu obciąŜenia - składowej czynnej tego
prądu.
Parametr napięcie startu, nie zaleŜy od obciąŜenia i
zapewnia optymalną wartość momentu w zakresie
małych prędkości silnika.
Jeśli kilka silników jest dołączonych do jednego
przemiennika częstotliwości - praca równoległa, funkcje
kompensacji napięcia zaleŜne od obciąŜenia powinny być
wyłączone.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
15
Przemienniki częstotliwości
Poślizg w silnikach asynchronicznych jest zaleŜny od
obciąŜenia i wynosi około 5% prędkości nominalnej
silnika.
Np. dla dwubiegunowego silnika poślizg będzie wynosić
150 obr./min.
Przy sterowaniu silnika przemiennikiem częstotliwości
poślizg moŜe wynosić ok. 50% w zakresie małych
obrotów np. 300 obr./min. (tj. 10% wartości nominalnej).
Jeśli przemiennik częstotliwości steruje pracą silnika w
zakresie 5% wartości nominalnej prędkości obrotowej
przy pełnym obciąŜeniu, to silnik moŜe nie ruszyć.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
16
Przemienniki częstotliwości
Poślizg - zjawisko niekorzystne, moŜe być w pełni
skompensowane przez przemiennik częstotliwości
poprzez efektywny pomiar składowej czynnej prądu fazowych prądów silnika.
Kompensacja poślizgu jest realizowana przez
odpowiednie zwiększenie częstotliwości napięcia
wyjściowego przemiennika częstotliwości - czynna
kompensacja poślizgu (ang. active slip compensation).
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
17
Przemienniki częstotliwości
Przemiennik ogranicza prąd silnika przez zmniejszanie
napięcia i częstotliwości wyjściowej.
Poziom ograniczenia prądowego jest regulowany i
gwarantuje, Ŝe silnik nie będzie pobierał zbyt duŜego
prądu przez dłuŜszy czas, co mogłoby doprowadzić do
jego uszkodzenia.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
18
Przemienniki częstotliwości
Charakterystyki momentu silnika zawierają się w
obszarze prądów znamionowych przemiennika
częstotliwości.
Zaleta: przemiennik częstotliwości umoŜliwia
zwiększenie momentu silnika ponad jego moment
znamionowy, np. uzyskanie 160% wartości momentu
znamionowego przez dłuŜszy lub krótszy okres czasu.
Przemiennik częstotliwości umoŜliwia pracę silnika przy
prędkościach większych od jego prędkości
synchronicznej - prędkości nadsynchroniczne w
zakresie ok. 200% nominalnych obrotów.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
19
Przemienniki częstotliwości
Przemiennik nie jest w stanie dostarczyć wyŜszego
napięcia niŜ napięcie sieci, z której jest zasilany, co
prowadzi do zmniejszania się stosunku napięcia zasilania
silnika do częstotliwości przy przekraczaniu prędkości
znamionowych.
Wówczas pole magnetyczne słabnie i moment
wytwarzany na wale silnika zmniejsza się w stosunku
1/n.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
20
Przemienniki częstotliwości
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
21
Przemienniki częstotliwości
Maksymalny prąd na wyjściu przemiennika
częstotliwości pozostaje niezmieniony (Is = const.). To
prowadzi do utrzymania stałej mocy silnika w przedziale
prędkości od nominalnej do ok. 200% ponad prędkość
nominalną.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
22
Przemienniki częstotliwości
Prędkość silnika:
◦ w obrotach na minutę - rpm,
◦ w hercach - Hz,
◦ w procentach nominalnej prędkości silnika - %.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
23
Przemienniki częstotliwości
Zmiana stosunku napięcia do częstotliwości ma wpływ
na przebieg charakterystyk momentu obrotowego
silnika.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
24
Przemienniki częstotliwości
Zalety cyfrowych urządzeń stosowanych w
napędach:
◦ polepszenie powtarzalności i stabilność parametrów
sterowania,
◦ łatwiejsze sterowanie układami pomiarowymi,
◦ elastyczność urządzeń w zastosowaniach do nietypowych
aplikacji,
◦ precyzyjniejsze sterowanie, takŜe z większych odległości
np.: łącza modemowe RS485, itp..
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
25
Przemienniki częstotliwości
Wybór rodzaju przemiennika częstotliwości:
jest rozwaŜenie przebiegu charakterystyki obciąŜenia
silnika funkcji prędkości.
Cztery metody wyznaczania wymaganych osiągów
wyjściowych przemiennika częstotliwości, wybór
metody zaleŜy od danych silnika:
◦ Wybór przemiennika częstotliwości na podstawie
nominalnego prądu silnika.
◦ Wybór przemiennika częstotliwości bazujący na wartości
mocy pozornej SM.
◦ Wybór przemiennika częstotliwości w zaleŜności od mocy
czynnej na wale silnika.
◦ Wybór przemiennika na podstawie na podstawie
standardowych serii silników
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
26
Przemienniki częstotliwości
Charakterystyki obciąŜenia
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
27
Przemienniki częstotliwości
OdróŜnienie charakterystyk obciąŜenia:
◦ kiedy prędkość pomp odśrodkowych i wentylatorów
wzrasta, moc równieŜ wzrasta proporcjonalnie do
prędkości w trzeciej potędze P = f(n3),
◦ podczas normalnej pracy pomp odśrodkowych i
wentylatorów prędkość jest regulowana w zakresie 5090% prędkości znamionowej. ObciąŜenie wzrasta w
kwadracie prędkości obrotowej silnika i moŜe
przykładowo kształtować się na poziomie 30-80%.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
28
Przemienniki częstotliwości
Wybór przemiennika częstotliwości na podstawie prądu
IM, który pobiera silnik. JeŜeli silnik nie jest w pełni
obciąŜony, prąd silnika moŜe zostać zmierzony w
podobnym napędzie pracującym przy pełnej wydajności.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
29
Przemienniki czestotliwości
Przykład: Silnik 7,5kW/3x400 V pobiera prąd 14,73 A.
Na podstawie danych technicznych przemiennika,
moŜemy stwierdzić, Ŝe powinien on zostać wybrany na
ciągły prąd wyjściowy wyŜszy albo równy 14,73 A dla
stało momentowej lub zmiennej w kwadracie prędkości
charakterystyki momentu obciąŜenia.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
30
Przemienniki częstotliwości
Wybór przemiennika częstotliwości na podstawie mocy
pozornej SM pobieranej przez silnik i dostarczanej z
przemiennika częstotliwości.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
31
Przemienniki częstotliwości
Przykład: Silnik 7.5kW/3x400V pobiera prąd 14.73 A
SM =
UJ 3
= 10,2kVA
1000
Na podstawie danych technicznych przemiennika
częstotliwości wybieramy przemiennik, którego
maksymalna ciągła wyjściowa moc pozorna jest wyŜsza
lub równa 10,2kVA przy stałej albo zmiennej w
kwadracie w funkcji prędkości charakterystyce
momentu.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
32
Przemienniki częstotliwości
Wybór przemiennika wg mocy czynnej PM wytwarzanej
przez silnik. JednakŜe, poniewaŜ cos φ i sprawność η
silnika zmieniają się wraz z obciąŜeniem, to ta metoda
jest nieprecyzyjna.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
33
Przemienniki częstotliwości
Przykład: Silnik o mocy 3kW ze sprawnością η = 0.8 i
cos φ = 0.81
Sm =
PM
= 4,6kVA
η cos ϕ
Przemiennik jest dobierany – na podstawie jego danych
technicznych, na maksymalną wyjściową ciągłą moc
czynną większą lub równą 4.6kVA stałej lub
kwadratowej charakterystyce momentu.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
34
Przemienniki częstotliwości
Z praktycznych przyczyn moc znamionowa większości
przemienników jest specyfikowana dla standardowych
serii - typoszeregu silników asynchronicznych.
Piotr Sauer
Katedra Sterowania i Inżynierii Systemów
35