Podstawowe własności fizyczne cienkich warstw magnetycznych
Badanie procesów przemagnesowania cienkich warstw przy pomocy
histerezografu
1 Ferromagnetyzm
1.1
Namagnesowanie
1.2
Proces przemagnesowania w ferromagnetykach
1.3
Rodzaje energii magnetycznej
1.4
Źródła anizotropii magnetycznej
1.5
Domeny magnetyczne
2 Warstwy magnetyczne z anizotropią jednoosiową – proces przemagnesowania
2.1
Własności warstwy jednodomenowej – model koherentnej rotacji namagnesowania
2.2
Model przemagnesowania Stonera–Wohlfarta
2.3
Własności realnych warstw magnetycznych
3 Histerezograf i metoda pomiaru procesu przemagnesowania w cienkich warstwach
magnetycznych
3.1
Przebieg ćwiczenia
Literatura
Zakład Cienkich Warstw Magnetycznych
Instytut Fizyki Molekularnej
Polskiej Akademii Nauk
1
1. Ferromagnetyzm
Rozdział ten dotyczy wybranych, podstawowych koncepcji ferromagnetyzmu w
materiałach litych, które będą bezpośrednio związane z własnościami warstw magnetycznych.
Bardziej szczegółowe informacje można znaleźć w monografiach [1-3].
1.1. Namagnesowanie
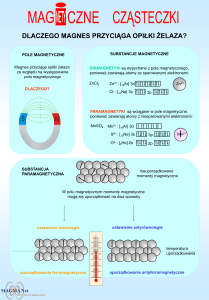
Ferromagnetyzm jest zjawiskiem kolektywnym, które polega na spontanicznym
uporządkowaniu momentów atomowych w ciele stałym i jest ilościowo wyrażane przez
namagnesowanie M, określane jako moment magnetyczny jednostki objętości (emu/cm3 =
Gauss w układzie CGS lub A/m w jednostkach SI). Tendencja do wzajemnego równoległego
uporządkowania spinów została przypisana przez Weissa efektowi działania pola
molekularnego, proporcjonalnego do M. Jednak w rzeczywistości zjawisko to jest związane z
kwantową naturą oddziaływań wymiennych. Gdy temperatura wzrasta, namagnesowanie M
maleje w wyniku fluktuacji termicznych sieci krystalicznej. Powyżej temperatury krytycznej
Tc , nazywanej temperaturą Curie, namagnesowanie znika. Zadaniem teorii ferromagnetyzmu
jest wyjaśnienie temperaturowej zależności M oraz oszacowanie wartości Tc.
Ferromagnetyzm związany jest z nieskompensowanymi spinami elektronów 3d w
metalach ferromagnetycznych Fe, Ni, Co i ich stopach ( a także w związkach
niemetalicznych). Zgodnie z teorią fal spinowych, odchylenia od całkowicie kolinearnego
uporządkowania spinów reprezentowane są przez ”fale” periodycznych zaburzeń spinowych.
Teoria fal spinowych doprowadziła do sformułowania słynnego prawa Blocha, które
przewiduje zmniejszenie namagnesowania proporcjonalnie do T3/2.
W ferromagnetykach metalicznych mobilność elektronów 3d sprawia, że ich
magnetyzm należy opisywać w ramach teorii pasmowej ciała stałego, a nie w ramach modelu
Heisenberga, w którym spiny są zlokalizowane. Pierwszą próbą opisu ferromagnetyzmu
elektronów „wędrownych” w metalach jest teoria pasmowa Stonera – Wohlfartha [1].
2
1.2. Proces przemagnesowania w ferromagnetykach
Rozdział ten dotyczy mikroskopowego opisu odpowiedzi litego ferromagnetyka na
zewnętrzne pole magnetyczne. Aspekt ten jest istotny z punktu widzenia podstaw większości
zastosowań technicznych.
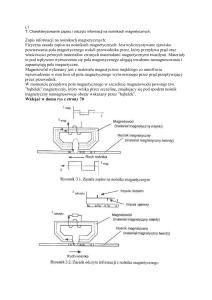
W substancjach ferromagnetycznych krzywe magnesowania, szczególnie w małych
polach magnetycznych, znacznie różnią się od próbki do próbki i są funkcją „historii”
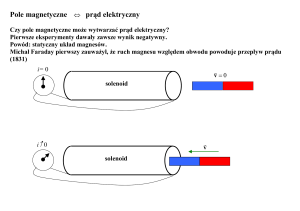
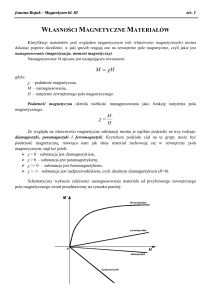
Rysunek 1 Pętla histerezy
w ferromagnetyku
magnetycznej próbki. Gdy materiał ferromagnetyczny w stanie „dziewiczym” (t.j. takim w
którym nigdy nie był namagnesowany) poddany zostanie działaniem wzrastającego pola
magnetycznego, jego namagnesowanie będzie wzrastać w sposób opisany przez pierwotną
krzywą namagnesowania (krzywa A na Rys.1). Część liniowa odpowiada odwracalnym
zmianom namagnesowania, podczas gdy część nieliniowa z krzywizną dodatnią odpowiada
zmianom nieodwracalnym. Gdy pole jest duże, M zmierza do nasycenia Ms . Następnie, gdy
pole jest zmniejszane w kierunku dużych wartości ujemnych, namagnesowanie podąża
(krzywa B) aż do wartości - Ms. Potem, przy ponownym wzroście pola, namagnesowanie
przebiega zgodnie z krzywą (C). Te dwie krzywe (B) i (C) tworzą pętlę histerezy.
Powierzchnia pętli jest miarą energii, którą należy dostarczyć aby zatoczyć pętlę i która ulega
przemianie w ciepło ( straty magnetyczne).
3
Pętla histerezy charakteryzuje się:
- remanencją Mr ( namagnesowanie remanencji, Mr, które ferromagnetyk osiąga w zerowym
polu),
-
polem koercji Hc, które jest wymagane do zlikwidowania namagnesowania. Zależnie od
materiału pole koercji może przyjmować wartości w bardzo szerokim zakresie: Hc jest
rzędu 10-1 Am-1 (≈ 0.001Oe) dla czystego Fe, ale może być rzędu 105 Am-1 (103 Oe) dla
magnesów trwałych takich jak Nd2Fe14B. Jeżeli Hc, jest duże, tak jak w ostatnim
przypadku, materiał taki nazywamy magnetycznie twardym.
W pewnych wypadkach interesującą wielkością jest maksymalna podatność
magnetyczna χm równa maksymalnej wartości M/H, w innych
ważna jest podatność
różniczkowa χd =dM/dH. Jeszcze w innych zastosowaniach, należy rozważać względną
przenikalność magnetyczną µr = 1+χ
χ =B/µ0H, która może osiągnąć wartości większe niż104
dla stopów Fe-Ni. Gdy µr jest bardzo duże w małych polach a Hc, jest małe (rzędu
dziesiętnych Am-1), materiał taki nazywamy magnetycznie miękkim.
1.3. Rodzaje energii magnetycznej
Mimo iż źródła ferromagnetyzmu mają naturę kwantową, do opisu tego zjawiska często
wystarczające jest podejście fenomenologiczne, w którym podstawowym problemem jest
znalezienie równowagowego kierunku M w każdym punkcie ferromagnetyka, gdy znana jest
wartość pola magnetycznego i jego własności magnetyczne. Ten tzw. problem
mikromagnetyczny można rozwiązać jedynie w kilku szczególnych przypadkach. Aby
uzyskać rozwiązanie, należy rozważyć szereg rodzajów energii magnetycznej:
- energii w zewnętrznym polu magnetycznym,
- energii magnetostatycznej,
- energii anizotropii
- energii wymiany.
4
1.3.1 Energia w zewnętrznym polu
Na umieszczony w jednorodnym polu magnetycznym H ferromagnetyk o
namagnesowaniu M, działa moment siły na H × M, który dąży do ustawienia M równolegle
do H. Gęstość energii magnetyka w zewnętrznym polu wynosi
EH = − M ⋅ H .
(1)
A więc stan o minimalnej energii osiągnięty jest wtedy, gdy M i H są kolinearne.
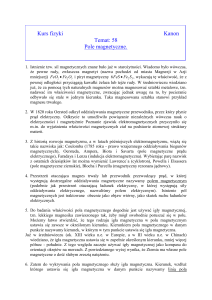
1.2.2. Energia magnetostatyczna
W miejscu próbki, gdzie M jest nieciągłe ( t.j. ∇⋅ M ≠ 0 ) powstają bieguny
magnetyczne i pojawia się pole magnetyczne Hmag ( różne od pola zewnętrznego H)
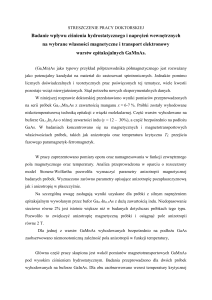
Rysunek 2 Pole magnetostatyczne
(rozmagnesowania) próbki
magnetycznej o kształcie elipsoidy.
Pole to wynika z obecności biegunów
magnetycznych pojawiających się na
powierzchni próbki.
generowane przez te bieguny. Nieciągłość namagnesowania pojawia się, gdy na M działają
silne lokalne zaburzenia, np. na brzegach próbki (Rys. 2) lub wewnątrz próbki w obszarach
znacznie różniących się od otoczenia. Gęstość energii magnetostatycznej (rozmagnesowania)
związanej z polem Hmag dana jest przez
Emag = – 1/2 Hmag M ,
(2)
gdzie czynnik 1/2 wynika z faktu, że mamy do czynienia z energią własną próbki.
1.3.3. Energia anizotropii
Energia ferromagnetyka może zależeć również od orientacji namagnesowania M
względem pewnych osi, których położenie zależy od symetrii krystalicznej. Jeżeli α1, α2, α3
5
są cosinusami kątów określających orientację wektora M, to gęstość energii anizotropii
magnetokrystalicznej, Ek, można wyrazić przez:
Ek = K f(α1, α2, α3),
(3)
gdzie K jest stałą anizotropii a f jest funkcją orientacji M. Kierunki namagnesowania M, dla
których Ek osiąga minima i maksima są określone odpowiednio jako kierunki łatwe i trudne.
Jednak z powodu tego, iż energia Ek, jest zazwyczaj niezależna od zwrotu M, nazywamy je
osiami łatwymi lub trudnymi.
1.3.4. Energia wymiany
Kwantowy mechanizm wymiany,
który powoduje wzajemne uporządkowanie
równoległe spinów przeciwdziała również wszelkim odchyleniom namagnesowania M od
jednorodnego kolinearnego uporządkowania. Gęstość energii wymiennej Eex, wynikająca z
takiego odchylenia spinów wyraża się związkiem
Eex = A / M2 ∇⋅ M2,
gdzie A jest stałą wymiany (np. dla NiFe
(4)
A ≈ 10-6 erg/cm). Energia wymiany określa
„sztywność” namagnesowania M, t.j. określa tendencję niwelowania wszelkich gradientów
namagnesowania.
Energia
całkowita
ferromagnetyka
jest
określana
przez
sumę
poszczególnych przyczynków
Ecał = EH + Ema + Ek + Eex.
Można zauważyć, że każdy ze składników energii całkowitej zależny jest od współrzędnych
położenia w próbce oraz od orientacji M w danym miejscu. Tak więc, aby wyznaczyć M jako
funkcję współrzędnych położenia, Ecał musi być minimalizowana w każdym punkcie próbki
ze względu na kąty określające kierunek M. Jest to równoważne warunkowi zerowania się
momentu, gdyż moment siły jest zdefiniowany jako pochodna energii względem kąta: dE/dΘ.
Podstawowe zagadnienie mikromagnetyzmu polega na wyznaczeniu kątów określających
równowagowe położenie M.
6
1.4. Źródła energii anizotropii
Anizotropia magnetyczna opisana np. równaniem (3) może mieć wielorakie źródła.
Anizotropia magnetyczna może wynikać z geometrycznego kształtu próbki. Wynika to stąd,
że rozkład biegunów magnetycznych na powierzchni próbki jest zależny od orientacji M.
Można wykazać, że dla próbek o kształcie elipsoidy Hmag jest jednorodne w ich wnętrzu i
wynosi Hmag = − N M, gdzie N jest tzw. współczynnikiem rozmagnesowania zależnym od
orientacji
M względem osi głównych elipsoidy. N jest wartością tensorową. Dla osi
głównych Na + Nb +Nc = 4π.
Równanie (2) pokazuje bezpośrednio, że dla próbki elipsoidalnej
Ek = 1/2 N M2.
(5)
Ten rodzaj energii nazywamy anizotropią kształtu. W próbkach monokrystalicznych,
anizotropia magnetokrystaliczna jest wywołana sprzężeniem spin-orbita, co powoduje że Ek
zależy od kierunku M względem osi kryształu. Dla kryształów o symetrii kubicznej Ek może
być wyrażona przez
Ek = K1 ∑ αi2 αj2,
(6)
gdzie K1 jest stałą anizotropii magnetokrystalicznej, αi, αj są cosinusami kierunkowymi M.
Z mikroskopowego punktu widzenia, ilościowe ujęcie wpływu sprzężenia spin-orbita jest
trudnym zagadnieniem. Cały mechanizm można wyjaśnić w następujący sposób: momenty
spinowe odpowiedzialne za ferromagnetyzm oddziaływają z orbitalnymi momentami
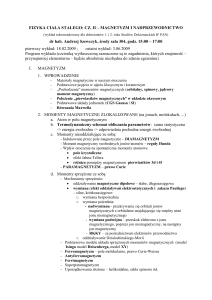
atomowymi. Z kolei momenty orbitalne odziaływują z siecią krystaliczną. Rysunek 3
przedstawia liniowy łańcuch atomowy. Dzięki sprzężeniu spin-orbita kierunek spinu wynika z
orientacji chmury elektronowej, która określona jest przez kierunek momentu orbitalnego.
Ponieważ energia układu (a) różni się od energii układu (b) mówimy, że jest ona
anizotropowa.
7
Rysunek 3 Dzięki oddziaływaniu spin-orbita chmura elektronowa
nie ma symetrii sferycznej. W stanie (a) i (b) energie
elektrostatyczna i energia wymiany układu są różne w wyniku
czego powstaje anizotropia magnetyczna.
Dla kryształu o innych symetriach można również podać relacje analogiczne do rów.(6).
Jeżeli próbka (np. cienka warstwa) jest polikrystaliczna, wówczas energia krystaliczna Ek
uśrednia się do zera. Przeważnie jednak mamy do czynienia z pewnym preferencyjnym
ułożeniem krystalitów ( tzw. teksturą) i wówczas Ek jest różna od zera.
Jeżeli ferromagnetyk poddamy działaniu jakiegoś naprężenia, wówczas z powodu
odkształcenia sieci krystalicznej anizotropia magnetokrystaliczna różni się zależnie od
kierunku i wartości naprężenia. Zjawisko to nazywamy magnetostrykcją. Ogólnie,
magnetostrykcja opisuje zarówno zjawisko zmiany energii anizotropii spowodowane
naprężeniem, jak i zjawisko odwrotne: zmiany kształtu ferromagnetyka spowodowane jego
magnesowaniem. Jeżeli teraz do próbki polikrystalicznej (o chaotycznie rozłożonych
krystalitach) przyłożymy naprężenie σ energia związana z takim stanem równa będzie
Ek = 3/2 λ⋅σ⋅sin 2ϕ0,
(7)
gdzie ϕ0 jest kątem pomiędzy M i kierunkiem naprężenia, a λ jest uśrednioną stałą
magnetostrykcji. Ten rodzaj energii nazywamy anizotropią magnetoelastyczną. Anizotropia,
która charakteryzuje się zależnością typu sin2ϕ0 nazywana jest anizotropią jednoosiową.
8
Ogólne wyrażenie opisujące anizotropię jednoosiową, to
Ek = Ku⋅sin 2ϕ0 ,
(8)
gdzie ϕ0 jest kątem pomiędzy M i osią łatwą (EA – easy axis) próbki, a Ku jest stałą
anizotropii jednoosiowej. Zgodnie z równaniem (8) definiuje się dwa równoważne stany o
najniższej energii (ϕ0 = 0 lub π); w tych stanach o najniższej energii M jest skierowane
wzdłuż EA (dla anizotropii magnetoelastycznej oś łatwa jest równoległa do przyłożonego
naprężenia, gdy λ > 0). Gdy M odchyli się od EA, na przykład w wyniku przyłożenia pola
magnetycznego, Ek wzrasta do maksimum dla M skierowanego prostopadle do EA (ϕ0 = π/2).
Taki kierunek nazywamy kierunkiem trudnym lub osią trudną (HA – hard axis). Niektóre
charakterystyki
anizotropii
jednoosiowej
można
łatwiej
interpretować
w
ramach
ekwiwalentnego pola magnetycznego. W tym celu definiujemy pole anizotropii HK jako
HK = 2K/M.
Inny
mechanizm powstawania
(9)
anizotropii
jednoosiowej
wynika
z
procesu
wygrzewania w polu magnetycznym. Jeżeli jakiś materiał ferromagnetyczny poddamy
działaniu wysokiej temperatury w obecności pola magnetycznego, stwierdzimy, że po
ochłodzeniu do temperatury pokojowej indukuje się w próbce anizotropia jednoosiowa z osią
łatwą wzdłuż kierunku przyłożonego pola. Taką jednoosiową anizotropię nazywamy
anizotropią indukowaną polem. Przyjmuje się, że w polu magnetycznym indukuje się pewne
krótkozasięgowe uporządkowanie (np. pole H generuje pewne uporządkowanie par
atomowych). Takie uporządkowanie zostaje zamrożone w czasie chłodzenia i powoduje
powstanie anizotropii jednoosiowej.
1.5. Domeny magnetyczne
Aby
zminimalizować
energię
magnetostatyczną
Ems
związaną
z
polem
odmagnesowania, jednodomenowy ferromagnetyk ulega podziałowi na domeny. Rozmiary
domen są najczęściej małe (od µm do mm) , mimo to jednak zawierają w sobie ogromną
9
liczbę atomów. Wewnątrz pojedynczej domeny momenty magnetyczne są uporządkowane
równolegle, lecz od domeny do domeny momenty magnetyczne skierowane są w różnych
kierunkach. Tak więc globalne namagnesowanie próbki ferromagnetycznej jest zerowe. Na
przykład, w pojedynczym krysztale Fe o symetrii kubicznej (bcc) mamy sześć typów domen,
Rysunek 4 Struktura domenowa
kubicznego kryształu
o osiach
łatwych typu [100].
z których każda odpowiada jednemu z równoważnych kierunków łatwego namagnesowania
równoległego do osi typu [100] (Rys.4)
Ferromagnetyk ulega więc podziałowi na domeny magnetyczne, gdyż w stanie
jednodomenowym (gdy w całej objętości momenty magnetyczne skierowane byłyby w
Rysunek 5 Podział ferromagnetyka na domeny
jednym kierunku) jego energia magnetostatyczna byłaby duża (Rys.5). Na przykład,
namagnesowana do nasycenia, próbka Fe o kształcie kulistym charakteryzuje się energią
magnetostatyczną 10-krotnie większą od energii anizotropii magnetokrystalicznej.
10
2.
Warstwy
magnetyczne
z
anizotropią
jednoosiową
–
proces
przemagnesowania
Szczególne duże znaczenie mają warstwy magnetyczne z anizotropią jedoosiową w
płaszczyźnie warstwy. Warstwy takie otrzymuje się przez naparowanie próżniowe metalu
ferromagnetycznego lub stopu ( np. permaloju ) na podłoże szklane. Znaną metodą osadzania
cienkich warstw jest metoda rozpylania jonowego. W metodzie tej atomy metalu są wybijane
z blach metalowych ( tzw. targetów) przy pomocy jonów Ar. Wybite atomy metali
ferromagnetycznych mają na tyle dużą energię kinetyczną, że osadzają się na podłoża
Rysunek
6
Schematyczny
rysunek
przedstawiający
warstwę
z
anizotropią
jednoosiową. Oś łatwa zaznaczona jest
przerywaną linią poziomą. Pole H jest przyłożone
pod kątem β do EA, co powoduje że
namagnesowanie M odchyla się od EA o kąt φo.
umieszczone w pobliżu targetów. Cienkie warstwy można również osadzać przez
naparowanie termiczne z roztopionych metali. Inną metodą osadzania cienkich warstw jest
metoda elektrolityczna polegająca na osadzaniu metali z odpowiednich roztworów soli (np.
NiSO4).
Typowa warstwa ferromagnetyczna jest naparowana na gładkie (o szorstkości rzędu
pojedynczych Å) podłoże szklane (Rys. 6). Warstwa o średnicy 1 cm i grubości 1000 Å
wykonana jest ze stopu 81% Ni i 19 % Fe (permaloj o bardzo miękkich własnościach
magnetycznych). Warstwa taka składa się z bardzo drobnych i rozłożonych chaotycznie
krystalitów o średnicy około 100 Å. Typowe wartości podstawowych parametrów
charakteryzujących własności magnetyczne naszej przykładowej warstwy są: pole anizotropii
HK=3 Oe, pole koercji HC=1 Oe i mała dyspersja osi łatwych rzędu 2o.
11
2.1 Własności warstwy jednodomenowej – model koherentnej rotacji
Dobrym przybliżeniem warstwy ferromagnetycznej o grubości d i średnicy L jest
spłaszczona elipsoida obrotowa (Rys. 7 ).Dla takiej elipsoidy (i w efekcie dla warstwy)
Rysunek 7 Porównanie warstwy magnetycznej ze spłaszczoną elipsoidą obrotową.
współczynnik rozmagnesowania w kierunku prostopadłym wynosi N┴ ≈ 4π, natomiast w
kierunku równoległym –
N|| ≈ 4πd/(d+L) ≈ 0. Wynika stąd, że dla typowej warstwy
permaloju bieguny magnetyczne dla M prostopadłego do warstwy wytwarzają pole
rozmagnesowania 4πM, o wartości około 104 Oe. Natomiast, gdy M leży w płaszczyźnie
warstwy, pole rozmagnesowania jest najczęściej zaniedbywanie małe. Tak więc zrozumiałym
jest, dlaczego M w typowych warstwach leży w płaszczyźnie warstwy; gdybyśmy wychylili
M z płaszczyzny warstwy, duże pole rozmagnesowania sprowadziłoby je z powrotem w
stronę płaszczyzny. Z tego względu mówimy, że warstwa charakteryzuje się anizotropią
kształtu z osią trudną prostopadłą do płaszczyzny ( lub płaszczyzną łatwą zgodną z
płaszczyzną warstwy). Stała anizotropii kształtu KSh wyrażona przez różnicę energii w tych
dwóch konfiguracjach wynosi 2πM2 i jest dla warstw Ni-Fe rzędu 106 erg/cm3.
W pierwszym przybliżeniu rozkład namagnesowania wewnątrz warstwy jest
dwuwymiarowy, co stanowi istotne uproszczenie problemu mikromagnetycznego w
porównaniu z litym ferromagnetykiem. W dyskusji własności magnetycznych wygodnie jest
rozważyć przypadek warstwy namagnesowanej do nasycenia, a więc znajdującej się w stanie
jednodomenowym; jest to przypadek koherentnego namagnesowania (Rys. 8).
12
Rysunek 8 W pierwszym przybliżeniu można przyjąć, że namagnesowanie M jest koherentne w
płaszczyźnie warstwy Gdy występuje struktura domenowa, globalne namagnesowanie nie jest
koherentne.
Tak więc w pewnym polu H, M jest skierowane w sposób jednorodny pod kątem φo do osi
łatwej w każdym punkcie warstwy. Ponieważ zakładamy, że warstwa ma anizotropię
jednoosiową, stany o najniższej energii odpowiadają kątom φo = 0 i φo = π, t.j. w warunkach
równowagi M jest skierowane w lewo lub w prawo wzdłuż osi łatwej. Jeżeli M odchyli się od
osi łatwej, energia anizotropii wzrasta i osiąga maksimum dla φo = ± π/2, t.j. gdy M jest
skierowane wzdłuż os trudnej. Obrót namagnesowywania M spowodowany jest przyłożeniem
pola H pod kątem β do EA. Jeżeli M i KU są znane, możemy wyznaczyć kierunek M.
Całkowita energia Ecał jest sumą energii anizotropii i energii warstwy w zewnętrznym polu
magnetycznym
Ecał = Ku⋅sin 2ϕ0 − M ⋅ H cos(β-ϕ0) .
(10)
Aby wyznaczyć ϕ0 , musimy zminimalizować energię Etot, co jest równoważne rozwiązaniu
równania δEcał/δϕ0 = 0.
2.2 Model przemagnesowania Stonera-Wohlfartha
W tym paragrafie przedstawiona zostanie metoda, która umożliwia wyznaczenie
równowagowego kierunku namagnesowania w warstwie z anizotropią jednoosiową w
zależności od wartości i kierunku zewnętrznego pola magnetycznego. Metoda ta,
zaproponowana przez Stonera-Wohlfartha dla małych cząsteczek jednodomenowych z
anizotropią jednoosiową, umożliwia teoretyczny opis procesu przemagnesowania w warstwie
13
magnetycznej. Okazuje się bowiem, że z zupełnie dobrym przybliżeniem można przybliżyć
proces przemagnesowania cienkiej warstwy przy pomocy modelu przemagnesowania
cząsteczek jednodomenowych. Podstawowym założeniem w tym modelu jest koherentna
rotacja M w całej objętości warstwy, którą uważamy za jednodomenową.
Przepiszmy równanie (10) w postaci znormalizowanej, w której poszczególne wielkości
wyrażone są przez :
ecał=Ecał/M Hk, h=H/ Hk, h|| = H cos β / Hk, h┴ = H sin β / Hk,
gdzie ┴ i || odnoszą się do składowych prostopadłych i równoległych do kierunku łatwego EA.
Rownanie (10) można więc przedstawić w postaci
ecał= ½ sin2 ϕ0 – h|| cos ϕ0 – h┴ sin ϕ0 .
(11)
Warunek równowagi jest równoważny δecał/δϕ0 = 0 , co odpowiada równaniu
½ sin 2ϕ0 – h|| sin ϕ0 – h┴ cos ϕ0 = 0.
(12)
Wartości ϕ0 spełniające równanie (12) reprezentują stabilny stan równowagi M tylko wtedy,
gdy druga pochodna δ2 ecał /δ2 ϕ0 > 0 , co odpowiada
cos 2ϕ0 + h cos(ϕ0 – β) > 0.
(13)
Gdy pole H skierowane jest wzdłuż HA, t.j. β = π/2 i h|| =0, równanie (12) daje
liniową zależność namagnesowania m=ms sin ϕ0 względem pola
sin ϕ0 = h,
(14)
a nierówność (13) jest spełniona dla wszystkich wartości ϕ0. Dla wartości h=1
namagnesowanie nasyca się i osiąga wartość ms (Rys.9 b).
Gdy pole H jest skierowane wzdłuż EA, t.j. β = 0 i h┴ =0, rozwiązaniami układu
równań (12) i (13) są h|| = – cos ϕ0 i ϕ0 = 0 oraz ϕ0 = π. Stan stabilny osiągany jest jedynie
dla wartości
ϕ0 = 0, π a przejście pomiędzy tymi stabilnymi stanami realizuje się przy
wartości h|| = ± 1. Odpowiadająca temu przypadkowi pętla histerezy m=ms cos ϕ0 vs. h|| jest
pokazana na Rys. 9a.
14
Teoretyczne pętle histerezy z Rys.9 można porównać z pętlami eksperymentalnymi
Rysunek 9 Pętle histerezy wzdłuż osi łatwej EA (a) i trudnej HA (b)
obliczone na podstawie modelu Stonera-Wohlfartha.
pokazanymi na Rys.10.
2.3. Własności realnych warstw
Stan jednodomenowy i model koherentnej rotacji M jest dalece niewystarczający do
opisu procesu przemagnesowania realnych warstw magnetycznych. Dzieje się tak dlatego,
gdyż realne warstwy są w stanie dalekim od nasycenia, co spowodowane jest strukturą
domenową. Jeżeli w warstwie, która znajdowała się w stanie nasycenia wzdłuż EA przyłożyć
powoli zmieniające się pole przemagnesowujące, antyrównoległe do pierwotnego pola, to na
brzegach warstwy pojawiać się zaczną antyrównoległe domeny, których wzrost doprowadzi
do pełnego przemagnesowania warstwy. Aby wystąpił ruch domen, to ujemne pole w
kierunku EA musi przekroczyć pewną wartość progową Hc – pole koercji dla ruchu domeny.
Bardzo użytecznym przyrządem do badania własności magnetycznych cienkich warstw, w
szczególności do badania ich procesu przemagnesowania, jest histerezograf.1 Przykładowe
pętle histerezy zmierzone przy pomocy histerezografu przedstawione są na Rys.10. Pętla
histerezy pokazana na Rys.10.a została uzyskana w zmiennym polu magnetycznym
przyłożonym równolegle do EA. Pętla ta charakteryzuje się prostokątnym kształtem. Pole
koercji Hc = 1.8 Oe wyznaczono z szerokości pętli. Mimo znacznego podobieństwa tej pętli
1
Opis tego przyrządu będzie szczegółowo przedstawiony w paragrafie 3.
15
do pętli histerezy obliczonej przy pomocy modelu Stonera-Wohlfartha (Rys. 9a), należy
podkreślić, że pole Hc, przy którym następuje przemagnesowanie jest znacznie mniejsze od
pola Hc=2KU/M przewidywanego przez ten model. Powodem jest nukleacja domen
magnetycznych i ich ruch.
Przykładowa pętla wyznaczona dla kierunku trudnego HA pokazana jest na Rys. 10.b.
Wewnętrzna pętla, zdjęta w małych polach, jest linią prostą, zgodnie z modelem koherentnej
rotacji M. Jeżeli ekstrapolować tę wewnętrzną pętlę aż do wartości nasycenia, wówczas
można wyznaczyć wartość HK, przy której osiągniemy nasycenie. Wartości tej odpowiada
Rysunek 10 Eksperymentalne pętle histerezy dla EA (a) i HA (b).
pole anizotropii jednoosiowej HK= 3.5 Oe. Jednak pełna pętla histerezy w kierunku HA różni
się od pętli modelowej, obliczonej na podstawie teorii Stonera-Wohlfartha (Rys. 9b). W
16
przeciwieństwie do pętli modelowej jest ona otwarta, co świadczy o występowaniu procesów
niekoherentnych związanych z pojawieniem się ścian domenowych. Wynika to stąd, że
proces przemagnesowania w realnych warstwach związany jest także z ruchem ścian
domenowych oraz z tym, że w realnych warstwach występują lokalne zaburzenia
jednorodności
namagnesowania
polegające
na
dyspersji
lokalnych
kierunków
namagnesowania.
3. Histerezograf i metoda pomiaru procesu przemagnesowania w cienkich warstwach
magnetycznych
Pole koercji Hc i pole anizotropii jednoosiowej HK można wyznaczyć przy pomocy
histerezografu, którego schematyczna budowa pokazana jest na Rys.11. Histerezograf jest
przyrządem, przy pomocy którego obserwuje się na ekranie oscyloskopu zależność
namagnesowania M od zewnętrznego pola magnetycznego H. Pole magnetyczne wytwarzane
jest przez parę cewek Helmholtza (promień cewek jest równy ich odległości , co zapewnia
wytworzenie jednorodnego pola magnetycznego). Cewki Helmholtza zasilane są prądem
przemiennym o częstotliwości sieci (50 Hz). Zgodnie z prawem Ampera, pole wytwarzane
przez cewki jest proporcjonalne do natężenia prądu I, a więc do spadku napięcia na oporniku
wzorcowym R. Napięcie to jest podawane na płytki X oscyloskopu. Tak więc napięcie Ux jest
proporcjonalne do zmiennego pola H. To przemienne pole magnetyczne wywołuje
periodyczne przemagnesowanie warstwy magnetycznej umieszczonej w pobliżu cewki
odbiorczej (1). W wyniku indukcji elektromagnetycznej w cewce (1) indukuje się siła
elektromagnetyczna
proporcjonalna do szybkości zmian strumienia magnetycznego
przenikającego przez te cewkę. Ze względu na indukcję wzajemną cewki odbiorczej i cewek
Helmholtza, strumień ten zawiera znaczną składową pasożytniczą, która zakłóca pomiar.
Składową tę kompensuje się przy pomocy drugiej cewki (2) o przeciwnie nawiniętym
uzwojeniu. W rezultacie sygnał indukowany w układzie cewek odbiorczych jest
17
Rysunek 11 Schemat histerezografu
proporcjonalny do dΦ/dt, a więc do dM/dt. Napięcie to wzmacnia się i całkuje, a następnie
podaje się na wejście Y oscyloskopu. Scałkowany sygnał Uy jest proporcjonalny do
namagnesowania M. W rezultacie na ekranie obserwuje się pętlę histerezy, czyli zależność M
od H. Ważnym elementem histerezografu jest przesuwnik fazowy, który umożliwia właściwą
kompensację przesunięcia fazowego pomiędzy sygnałem Ux i Uy.
Tak jak to już opisano w części teoretycznej, proces przemagnesowania wykonuje się dla pola
H równoległego do HA oraz EA.
3.1. Przebieg ćwiczenia
♦ włączyć oscyloskop
♦ włączyć zasilanie integratora ,
♦ włączyć zasilanie nanowoltomierza,
♦ włączyć zasilanie autotransformatora,
♦ przy pomocy autotransformatora ustalić prąd przepływający przez cewki Helmholtza
na takim poziomie, aby na osi X uzyskać sygnał rzędu 100 mV. Prawidłowo
skompensować przesunięcie fazowe, gdy w cewce odbiorczej nie ma warstwy
18
magnetycznej. Na ekranie oscyloskopu powinno się obserwować linię poziomą lub
silnie spłaszczoną elipsę,
♦ umieścić warstwę magnetyczną w pobliżu cewki odbiorczej i przy pomocy
dodatkowej cewki kompensacyjnej oraz przy pomocy przesuwnika fazowego
skompensować do minimum sygnał pasożytniczy i uzykać na ekranie prawidłową
pętlę histerezy.
♦ po wstępnym zaobserwowaniu kilku pętli i opanowaniu procedury kompensacji
sygnałów pasożytniczych należy przeskalować sygnał Ux z jednostek napięcia (mV)
na jednostki pola magnetycznego (Oe). Przeskalowanie wykonujemy na podstawie
wykresu
kalibracji.
Prąd
płynący
przez
cewki
Helmholtza
jest
równy
I=Ux/R1=Ux(mV)/0.15 (Ohm).
♦ obserwacje pętli histerezy wykonać dla kierunku łatwego oraz kierunku trudnego a
wyniki zarejestrować przy pomocy folii (przerysować z ekranu) lub zapisać na
dyskietce przy pomocy oscyloskopu cyfrowego.
♦ na podstawie wyznaczonych dla kilku próbek pętli histerezy w kierunku HA i EA
wyznaczyć pole koercji Hc oraz pole anizotropii Hk.
♦ w opracowaniu należy porównać uzyskane wyniki i przeanalizować w ramach
modelu Stonera-Wohlfartha.
Literatura
[1] A. H. Morrish, Fizyczne podstawy magnetyzmu (PWN, Warszawa, 1970).
[2] L. I. Maissel and R. Glang, Handbook of thin film technology, (Mc Graw Hill Book
Comp., 1970) Chpt.17
[3] Ch. Kittel, Wstęp do fizyki ciała stałego, (PWN, Warszawa 1980)
19