POLITECHNIKA ŚLĄSKA
WYDZIAŁ INŻYNIERII ŚRODOWISKA I ENERGETYKI
INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH
LABORATORIUM ELEKTRYCZNE
Badania eksploatacyjne maszyn
elektrycznych
(E – 19)
Opracował: Dr inż. Włodzimierz OGULEWICZ
3
1. Cel ćwiczenia
Celem ćwiczenia jest poznanie zakresu obowiązujących badań technicznych dla
silników elektrycznych oraz wykonanie podstawowych pomiarów eksploatacyjnych
wybranej maszyny elektrycznej.
2. Wprowadzenie
Maszyny elektryczne, będące w eksploatacji, cechuje duża różnorodność. Istnieje
wiele kryteriów podziału tych urządzeń. Ogólnie dokonuje się podziału maszyn ze
względu na rodzaj przetwarzanej energii na: silniki, prądnice i przetwornice. Ze
względu na rodzaj prądu zasilającego rozróżniamy maszyny prądu stałego lub
przemiennego. Najliczniejszą grupę maszyn elektrycznych stanowią silniki prądu
przemiennego i im poświęcimy główną uwagę. Silniki prądu przemiennego mogą być:
synchroniczne, indukcyjne lub komutatorowe, będąc jednocześnie jedno-, dwu-, trójlub wielofazowe. Wśród silników indukcyjnych (asynchronicznych) rozróżnia się
jeszcze silniki pierścieniowe i najczęściej stosowane silniki klatkowe.
Z punktu widzenia badań technicznych i eksploatacyjnych oprócz rodzaju silnika
bardzo ważną rolę odgrywa podział silników na grupy ze względu na wartość mocy
znamionowej.
Silnik może być użytkowany po przeprowadzeniu wymaganych pomiarów
eksploatacyjnych wchodzących w skład badań technicznych, które wykażą, że
urządzenie jest bezpieczne.
2.1. Zależność zakresu badań od rodzaju maszyny
Maszyny elektryczne poddawane są pomiarom i badaniom zarówno w czasie
produkcji, jak i w czasie eksploatacji. Wykaz badań wchodzących w zakres prób typu
i wyrobu podano w tabeli 1.1. Tabelę sporządzono dla trzech zasadniczych rodzajów
maszyn elektrycznych:
·
maszyny prądu stałego,
·
maszyny indukcyjnej (asynchronicznej),
·
maszyny synchronicznej.
4
Tabela 1.1
Rodzaj próby lub badania
Oględziny
Rodzaj maszyny
prądu asynchro- synchrostałego
niczna
niczna
x
x
x
Sprawdzenie stopnia ochrony
x
x
x
Pomiar rezystancji uzwojeń prądem stałym
x
x
x
Wyznaczenie charakterystyk biegu jałowego
x
x
x
Próba nagrzewania
x
x
x
Wyznaczenie charakterystyki zewnętrznej
i znamionowego prądu wzbudzenia
Wyznaczenie charakterystyki mechanicznej
silników
x
Sprawdzenie zasobu wzbudzenia
x
Próba przeciążalności prądem lub momentem
x
Próba komutacji
x
Wyznaczenie strat i sprawności
x
x
x
x
x
x
x
x
x
Próba wytrzymałości mechanicznej przy n > nN
x
x
x
Próba izolacji zwojowej
x
x
x
Próba izolacji głównej uzwojeń
x
x
x
Pomiar poziomu zakłóceń radioelektrycznych
x
x
x
Pomiar znamionowego napięcia wirnika
w silnikach pierścieniowych
x
Pomiar prądu i momentu rozruchowego
x
x
Pomiar strat w stanie zwarcia
x
x
Wyznaczenie strat, sprawności i współczynnika
mocy
x
Sprawdzenie kształtu krzywej napięcia prądnic
x
Wyznaczenie reaktancji zastępczych i stałych
czasowych
x
Wyznaczenie charakterystyki zwarcia ustalonego
x
Wyznaczenie charakterystyki regulacji i obciążenia
x
Wyznaczenie strat obciążeniowych
x
Próba wytrzymałości uzwojeń na zwarcie udarowe
x
Badanie wzbudnicy maszyn obcowzbudnych
x
x
5
2.2. Klasyfikacja elektrycznych urządzeń napędowych
Wymagania odnośnie do prawidłowych wartości parametrów eksploatacyjnych
silników są silnie uzależnione od wartości napięć i mocy znamionowych. Rozróżnia
się tutaj cztery grupy urządzeń:
·
grupa I – urządzenia o mocy większej niż 250 kW oraz urządzenia
o napięciu znamionowym powyżej 1 kV bez względu na moc,
·
grupa II – urządzenia o mocy od 50 kW do 250 kW o napięciu
znamionowym nie wyższym niż 1 kV,
·
grupa III – urządzenia o mocy od 5,5 kW do 50 kW,
·
grupa IV – urządzenia o mocy poniżej 5,5 kW.
2.3. Zakres badań technicznych silników elektrycznych
W tabeli 1.2. przedstawiono obowiązujący zakres badań technicznych dla silników
elektrycznych [11].
Tabela 1.2
Rodzaj pomiaru
Wymagania techniczne
1
2
Uwagi
3
Pomiar nie jest
Pomiar rezystancji Wartości rezystancji uzwojeń powinny
wymagany dla silników
uzwojeń silników być zgodne z danymi producenta.
II, III, IV grupy.
– Rezystancja izolacji uzwojeń silników
I grupy przy temp. 75ºC zmierzona po Pomiar rezystancji
60 sekundach powinna być nie mniejsza należy przeprowadzać:
niż
1 MΩ
na
1 kV
napięcia
– megaomomierzem
znamionowego.
o napięciu 500 V
– Stosunek rezystancji izolacji uzwojenia i niższym,
silników o napięciu od 1 kV zmierzonej
– megaomomierzem
po 60 sekundach do rezystancji
o napięciu 1000 V
Pomiar rezystancji zmierzonej po 15 sekundach nie
dla uzwojeń
powinien być mniejszy niż 1,3
izolacji uzwojeń
o napięciu 500 V
(niezależnie od temperatury).
i wyższym do
– Rezystancja izolacji uzwojeń silników 1000 V,
II, III, IV grupy przy temperaturze 20ºC
– megaomomierzem
i wyższej nie powinna być mniejsza niż
o napięciu 2500 V
5 MΩ.
dla uzwojeń
– Rezystancja izolacji uzwojeń wirnika o napięciu wyższym
silnika synchronicznego nie powinna niż 1000 V.
być mniejsza niż 0,5 MΩ.
6
cd. tabeli 1.2
1
2
Rezystancja izolacji powinna być zgodna
Pomiar rezystancji
z danymi producenta, a przy ich braku nie
pozostałych
mniejsza niż 1 kΩ na 1 V napięcia
elementów
znamionowego.
Wynik 1-minutowej próby napięciowej
uzwojeń silników grupy I i II dokonanej
napięciem przemiennym wartości równej
75% wartości napięcia podczas próby
Próba napięciowa
wykonanej u producenta lub w zakładzie
uzwojeń
remontowym powinien być pozytywny.
Wartości rezystancji izolacji zmierzonej
bezpośrednio po próbie nie powinny być
mniejsze od 80% wartości przed próbą.
Rezystancja izolacji łożysk powinna być
Pomiar rezystancji
nie mniejsza niż 1 MΩ (dla silników,
izolacji łożysk
które mają izolowane stojaki łożyskowe).
Amplituda drgań łożysk nie może
Pomiar drgań
przekraczać wartości podanych przez
łożysk
producenta w dokumentacji technicznej.
Sprawdzenie
Dobór i nastawienie zabezpieczeń,
układów
działania sygnalizacji i pomiarów
zabezpieczeń,
powinny być zgodne z dokumentacją
pomiarów
techniczną i obowiązującymi przepisami.
i sygnalizacji
Sprawdzenie
Sprawność działania powinna być zgodna
sprawności
z warunkami technicznymi lub
działania układu
z uzgodnieniami między dostawcą
energoa użytkownikiem.
elektronicznego
Silnik powinien prawidłowo pracować
podczas:
– rozruchu urządzenia (czas rozruchu
powinien być zgodny z czasem
podanym przez producenta),
– ruchu nieobciążonego silnika w czasie
minimum 1 godziny,
Rozruch i ruch
– ruchu silnika grupy 1 i II w czasie
próbny
przewidzianym dla pracy urządzenia
technologicznego
przy
obciążeniu
znamionowym,
– ruch silników III grupy w czasie nie
krótszym niż 2 godziny przy obciążeniu
większym
niż
50%
prądu
znamionowego.
3
7
cd. tabeli 1.2
1
Sprawdzenie
stanu ochrony
przeciwporażeniowej
2
Ochrona przeciwporażeniowa powinna
spełniać wymagania ustalone
w przepisach w sprawie warunków
technicznych, jakim powinna odpowiadać
ochrona przeciwporażeniowa
w urządzeniach elektroenergetycznych.
3
Na placach budowy
należy stosować
dodatkowe wymagania
określone w odrębnych
przepisach.
Reasumując, wymagane pomiary eksploatacyjne należy uznać za prawidłowe,
jeżeli [11]:
1. Wartości rezystancji uzwojeń silników oraz współpracujących z nimi maszyn
elektrycznych są zgodne z danymi producenta lub wynikami poprzednich
pomiarów.
2. Dla silników grupy I oraz współpracujących z nimi maszyn elektrycznych:
· rezystancja izolacji (R60) uzwojenia przy temperaturze 20ºC i wyższej
zmierzona po 60 sekundach powinna być nie mniejsza od 1 MΩ na 1 kV
napięcia znamionowego uzwojenia,
· stosunek rezystancji izolacji uzwojenia silników o napięciu powyżej 1 kV
zmierzonej po 60 sekundach do rezystancji zmierzonej po następnych 15
sekundach powinien być nie mniejszy niż 1,3 (niezależnie od temperatury
uzwojenia),
· rezystancja izolacji uzwojenia wirnika silnika synchronicznego przy
temperaturze 20ºC powinna być nie mniejsza niż 0,5 MΩ.
3. Rezystancja izolacji uzwojeń silników grupy II, III, IV oraz współpracujących
z nimi urządzeń elektrycznych zmierzona w temperaturze 20ºC i wyższej jest
nie mniejsza niż 1 kΩ na 1 V napięcia znamionowego uzwojenia.
4. Rezystancja izolacji pozostałych elementów maszyn jest zgodna z danymi
producenta, a przy ich braku, nie mniejsza niż 1 kΩ na 1 V napięcia
znamionowego uzwojenia.
5. Ochrona przeciwporażeniowa spełnia wymagania obowiązujących przepisów.
3. Badania i pomiary
Badania techniczne i pomiary eksploatacyjne przeprowadza się dla kilku różnych
rodzajów maszyn elektrycznych. Maszyny do badań oraz zakres badań określa
prowadzący zajęcia.
8
3.1. Określenie wielkości mierzonych
W zakres przeprowadzanych badań i pomiarów silników elektrycznych wchodzą:
· pomiar rezystancji (oporności) uzwojeń,
· sprawdzenie stanu izolacji uzwojeń (pomiar rezystancji izolacji),
· wyznaczenie początków i końców uzwojeń fazowych,
· wyznaczenie sposobu połączeń uzwojeń wirnika,
· określenie kierunku wirowania maszyny,
· pomiar prędkości obrotowych,
· wyznaczenie charakterystyki biegu jałowego.
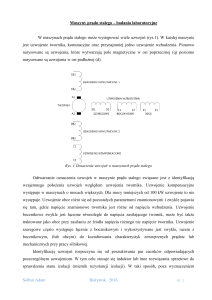
3.2. Pomiar rezystancji uzwojeń
Pomiary rezystancji uzwojeń przeprowadza się przy zatrzymanej maszynie,
stosując metodę techniczną (przy użyciu amperomierza i woltomierza) ze względu na
jej prostotę i dokładność. Pomiary rezystancji przeprowadza się w stanie zimnym
maszyny i temperaturę uzwojeń przyjmuje się równą temperaturze otoczenia. Prąd
pomiarowy nie powinien być większy od 20% prądu znamionowego danego
uzwojenia. Woltomierz przyłącza się tylko na czas pomiaru. Należy go odłączyć przed
wyłączeniem prądu pomiarowego, żeby nie zastał uszkodzony przez przepięcie,
powstające przy wyłączaniu dużych indukcyjności.
3.2.1. Schemat układu pomiarowego
Schemat układu do pomiaru małych rezystancji uzwojeń metodą techniczną
przedstawiono na rysunku 1.1.
+
Zasilacz
prądu
stałego
–
I
A
U
U1
V1
W1
U2
V2
W2
V
Rys. 1.1. Schemat układu do pomiaru rezystancji uzwojeń
9
3.2.2. Przebieg ćwiczenia
1. W układzie pomiarowym przedstawionym na rysunku 1.1. należy dokonać
trzykrotnego pomiaru wartości natężenia prądu i napięcia (najlepiej przez trzy
różne osoby) oraz wyznaczyć wartość średnią rezystancji uzwojenia.
2. Pomierzone w temperaturze otoczenia (t0) rezystancje uzwojeń należy
przeliczyć według zależności (1) na umowną temperaturę odniesienia (zależną
od klasy izolacji uzwojeń); w przypadku siników w laboratorium
przyjmujemy temperaturę 75ºC.
R
75
=
310 × R
235 + t 0
(1)
3. Serię pomiarów należy wykonać dla każdego uzwojenia badanej maszyny.
4. Wyniki pomiarów należy sukcesywnie notować w tabeli 1.3.
Tabela 1.3
Lp.
U
V
Dane maszyny:
Uzwojenie:
1.
2.
3.
śr.
Uzwojenie:
1.
2.
3.
śr.
I
R
R75
A
Ω
Ω
Lp.
U
I
R
R75
V
A
Ω
Ω
Uzwojenie:
1.
2.
3.
śr.
Uzwojenie:
1.
2.
3.
śr.
5. W celu wykazania różnic wynikających z zastosowania niewłaściwej metody
pomiarowej należy przeprowadzić pomiar jednego z uzwojeń (analogicznie do
poprzednich) stosując omomierz cyfrowy. Wyniki zanotować w czwartej
ćwiartce tabeli 1.3.
6. W rubryce dane maszyny należy wpisać wszystkie dane oczytane z tabliczki
znamionowej oraz określić i wpisać grupę urządzenia (z uwagi na moc).
7. W rubrykach uzwojenie należy wpisać oznaczenie literowe uzwojenia (np.
U1, U2).
10
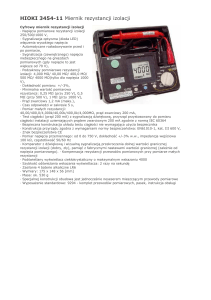
3.3. Sprawdzenie stanu izolacji. Pomiar rezystancji izolacji uzwojeń
Najprostszym sposobem badania stanu izolacji urządzeń elektrycznych jest pomiar
rezystancji izolacji megaomomierzem – omomierzem przystosowanym do pomiaru
dużych oporności. Megaomomierze budowane są jako induktorowe lub elektroniczne
(z przetwornicą). W laboratorium pomiar rezystancji izolacji uzwojeń maszyn
przeprowadza się megaomomierzem induktorowym o napięciu 500V. Przed
przystąpieniem do pomiarów należy:
· odczytać i wpisać do tabeli 1.4. wszystkie dane z tabliczki znamionowej
maszyny,
· określić (na podstawie wartości mocy i napięcia znamionowego) numer
grupy badanego urządzenia.
3.3.1. Przebieg ćwiczenia
1. Megaomomierz należy kolejno przyłączać pomiędzy obudowę maszyny
(zacisk uziemienia – PE) a końce uzwojeń (np. U1, V1, W1) oraz kolejno
pomiędzy dwa zaciski faz uzwojeń (np. U1–V1, U1–W1, V1–W1) (łącznie
mierzy się sześć różnych rezystancji).
2. Należy dokonać odczytu dwóch wartości rezystancji izolacji po 60 sekundach
i następnie po kolejnych 15 sekundach (w 75 sekundzie) w celu określenia
z zależności (2) współczynnika absorpcji k.
k=
R (60)
R (60+15)
.
(2)
3. Wyniki pomiarów należy sukcesywnie notować w tabeli 1.4.
Tabela 1.4
Dane maszyny:
Grupa:
zaciski: PE – U1 PE – V1 PE – W1 U1 – V1 U1 – W1 V1 – W1
R(60)
Ω
R(60+15)
Ω
k
—
Stan izolacji:
4. W ostatniej rubryce tabeli 1.4. należy wpisać ocenę stanu izolacji.
11
3.4. Wyznaczanie początków i końców uzwojeń fazowych
Sprawdzenie poprawności przyłączenia uzwojeń fazowych, po wstępnym
oznaczeniu początków i końców uzwojeń, przeprowadza się podłączając źródło prądu
stałego w jedno dowolnie wybrane uzwojenie fazowe i woltomierz prądu stałego
kolejno w dwa pozostałe uzwojenia. Schematycznie sposób badania przedstawiono na
rysunku 1.2. Jeżeli w chwili zamykania wyłącznika W woltomierz włączony kolejno
na zaciski pozostałych uzwojeń fazowych odchyla się w prawo (wskazuje napięcia
dodatnie – patrz rysunek 1.2.), to końce uzwojeń są oznaczone prawidłowo. (Przy
wyłączaniu wyłącznika W woltomierz wychyla się odwrotnie!).
+
W
Źródło
U1
V1
W1
prądu
stałego
V
–
U2
V2
W2
+
–
Rys. 1.2. Schemat układu do wyznaczania początków i końców uzwojeń fazowych
Wyniki badania wpisujemy w tabelę 1.5.
Tabela 1.5
Dane maszyny:
Grupa:
Oznaczenia początków i końców uzwojeń:
W dolnej rubryce należy wpisać uwagę o prawidłowości oznaczenia uzwojeń.
3.5. Określenie układu połączeń wirnika
Badanie układu połączeń uzwojeń fazowych wirnika ma zastosowanie jedynie do
maszyn pierścieniowych. Sprawdzenia, czy uzwojenia fazowe wirnika są połączone
w gwiazdę czy w trójkąt, dokonuje się łącząc szeregowo uzwojenia fazowe stojana
i zasilając je jednofazowym napięciem przemiennym o wartości znamionowej (lub
obniżonej). W czasie badania uzwojenia fazowe wirnika muszą być zwarte (zwarte
12
pierścienie). Schematycznie sposób badania przedstawiono na rysunku 1.3. Po
zasileniu układu należy obracać wirnik. Możliwe są dwie sytuacje:
· jeżeli obracając wirnik nie wyczuwa się uprzywilejowanych położeń
równowagi, to uzwojenia fazowe wirnika są połączone w gwiazdę,
· jeżeli natomiast wyczuwa się, że na wirnik działa moment
elektromagnetyczny i stara się go ustawić w określonych położeniach, to
uzwojenia fazowe wirnika są połączone w trójkąt.
L1
stojan
wirnik (?)
N
Rys. 1.3. Schemat układu do określenia sposobu połączeń uzwojeń fazowych wirnika
Wyniki badania wpisujemy w tabelę 1.6.
Tabela 1.6
Dane maszyny:
Grupa:
Połączenie uzwojeń wirnika:
W dolnej rubryce należy wpisać uwagę o sposobie połączenia uzwojeń wirnika.
3.5. Określanie pożądanego kierunku obrotów wirnika
Maszyny elektryczne trójfazowe (silniki i prądnice) muszą być łączone z siecią
elektroenergetyczną w taki sposób, żeby obracały się w odpowiednim kierunku
(silniki) lub żeby wytwarzały energię elektryczną ze zgodną z siecią kolejnością faz
(prądnice).
Kierunek obrotu powinien być:
· prawy (zgodny z ruchem wskazówek zegara) dla silnika,
· lewy (przeciwny do ruchu wskazówek zegara) dla prądnicy.
Kierunek określa się patrząc na maszynę:
· od strony czopa końcowego wału lub od strony grubszego czopa wału,
· od strony przeciwnej pierścieniom ślizgowym lub komutatorowi.
13
Wyniki badania maszyny wskazanej przez prowadzącego zajęcia wpisujemy
w tabelę 1.7.
Tabela 1.7
Dane maszyny:
Grupa:
Kierunek obrotów wirnika:
W dolnej rubryce po rozpoznaniu, czy maszyna jest silnikiem czy prądnicą, należy
wpisać uwagę o kierunku obrotów wirnika.
3.6. Wyznaczenie charakterystyki n = f(U1) przy biegu jałowym
Stanem biegu jałowego dowolnej, zasilonej maszyny elektrycznej nazywamy stan
charakteryzujący się brakiem obciążenia (wału dla silnika lub uzwojeń dla prądnicy).
Moc pobierana przez maszynę w stanie jałowym w całości idzie na pokrycie strat.
Wyznaczanie parametrów maszyn elektrycznych na podstawie pomiarów w stanie
jałowym (i również zwarcia) przedstawiono w ćwiczeniach: „Badanie transformatora”
i „Badanie silnika indukcyjnego”. W przypadku silnika indukcyjnego charakterystyki
biegu jałowego to przede wszystkim zależności natężenia prądu I0 i mocy P0
pobieranych z sieci przy zmianach napięcia zasilającego U1. W omawianym ćwiczeniu
wyznaczymy specyficzną charakterystykę z grupy charakterystyk biegu jałowego –
zależność prędkości obrotowej wału silnika indukcyjnego klatkowego n od wartości
napięcia zasilającego U1, w zakresie zmniejszanym od 1,2UN do napięcia, przy którym
silnik utknie (zatrzyma się).
3.6.1. Schemat układu pomiarowego
Schemat układu do pomiaru prędkości obrotowej w funkcji napięcia zasilającego
przedstawiono na rysunku 1.4.
ATr
V
U1
n
L1
L2
M
L3
Rys. 1.4. Schemat układu do wyznaczenia charakterystyki n = f(U1)
14
3.6.2. Przebieg ćwiczenia
1. W rubryce dane maszyny należy wpisać wszystkie dane odczytane z tabliczki
znamionowej silnika oraz określić i wpisać grupę urządzenia.
2. Autotransformatorem ATr (rysunek 1.4.) dokonać rozruchu silnika i ustawić
pierwszą wartość napięcia równą 1,2UN (UN – napięcie znamionowe silnika
odczytane z tabliczki znamionowej).
3. Dokonać pomiaru prędkości obrotowej wału silnika. Do pomiaru obrotów
użyć optycznego tachometru cyfrowego i/lub tachometru analogowego
(dociskanego do nakiełka w czopie wału). Napięcie zasilające należy
zmniejszać co ok. 30 V aż do momentu utknięcia silnika i każdorazowo
mierzyć prędkość obrotową odpowiadającą zadanemu napięciu.
4. Wyniki pomiarów należy sukcesywnie notować w tabeli 1.8.
Tabela 1.8
Dane maszyny:
bez obciążenia
Lp.
U1
V
z obciążeniem
n
obr/min
Lp.
1.
2.
3.
1.
2.
3.
itd.
itd.
U1
V
n
obr/min
5. W celu porównania zmian prędkości obrotowej przy biegu jałowym i pod
obciążeniem należy wykonać dodatkową serię pomiarów, a jej wyniki zapisać
w prawej części tabeli. Do obciążenia silnika stałą mocą można użyć prądnicy
prądu stałego z regulowaną rezystancją odbiornika, hamulca linowego lub
stanowiska z wahliwym zamocowaniem korpusu silnika.
4. Opracowanie wyników pomiarów
1. Przeliczyć rezystancje uzwojeń na umowną temperaturę odniesienia oraz
wyznaczyć dla rezystancji izolacji współczynniki absorpcji.
2. Sporządzić wykres zależności n = f(U1) (dwie krzywe na jednym wykresie).
15
5. Sprawozdanie
Sprawozdanie powinno zawierać:
1. Stronę tytułową (nazwę ćwiczenia, numer sekcji, nazwiska i imiona
ćwiczących oraz datę wykonania ćwiczenia).
2. Dane znamionowe badanych maszyn (typ, moc, napięcie, prąd, obroty,
współczynnik mocy itd.).
3. Schematy układów pomiarowych.
4. Wypełnione tabele wyników pomiarowych ze wszystkich stanowisk.
5. Wykresy zależności określonych w punkcie 4.
6. Stwierdzenia dotyczące stanu izolacji i poprawności połączeń uzwojeń.
7. Uwagi i wnioski (dotyczące przebiegu charakterystyk, ich odstępstw od
przebiegów teoretycznych, poprawności metod pomiaru rezystancji uzwojeń,
zakresu możliwej regulacji obrotów silnika klatkowego poprzez zmianę
napięcia zasilającego itp.).