LABORATORIUM ELEKTRONIKI I ELEKTROTECHNIKI
BADANIE TRÓJFAZOWEGO INDUKCYJNEGO
SILNIKA KLATKOWEGO METODĄ
BEZPOŚREDNIĄ
Opracował: dr inż. Aleksander Patyk
1.Cel i program ćwiczenia.
Celem ćwiczenia jest wyznaczenie właściwości ruchowych silnika indukcyjnego
klatkowego w różnych stanach pracy.
Program ćwiczenia obejmuje:
pomiar rezystancji uzwojenia stojana silnika;
pomiar biegu jałowego silnika;
pomiar zwarcia silnika;
pomiar obciążenia silnika.
2.Wstęp teoretyczny.
Silnik trójfazowy asynchroniczny indukcyjny klatkowy należy do najprostszych i
najtańszych silników. Zalety te powodują, że jest on często stosowany do napędów maszyn i
urządzeń. Ich zastosowanie poszerzyło się wraz z rozpowszechnieniem przekształtników
energoelektronicznych. Moce budowanych silników asynchronicznych obejmują zakres od kilku
kilowatów do kilku megawatów. Do zasilania silników stosuje się napięcie od 100 do 6000V.
Podstawą działania silnika indukcyjnego jest wirujące pole magnetyczne. Pole takie
otrzymujemy zasilając uzwojenie stojana symetrycznym napięciem trójfazowym. Pole to wiruje
z prędkością obrotową równą:
n1
60 f1
pb
(2.1)
2f1
pb
(2.2)
lub kątową
gdzie:
f1 – częstotliwość sieci zasilającej;
pb – liczba par biegunów (stała konstrukcyjna).
Pole wirujące przecinając pręty wirnika indukuje w nich siłę elektromotoryczną.
Wyidukowane napięcie powoduje przepływ prądów w zamkniętym obwodzie klatki. Wzajemne
oddziaływanie strumienia wirującego i prądów wirnika powoduje powstanie momentu
elektromagnetycznego.
2
Warunkiem powstania momentu elektromagnetycznego jest, aby prędkość obrotowa
wirnika była mniejsza od prędkości pola wirującego. Względną różnicę prędkości pola
wirującego i prędkości obrotowej wirnika nazywamy poślizgiem s i określamy go wzorem:
s
n1 n
n1
(2.3)
gdzie: n - prędkość obrotowa silnika (wirnika).
Istotny wpływ na własności ruchowe maszyny indukcyjnej klatkowej ma kształt
żłobków (i związany kształt prętów) wirnika. W zależności od kształtu żłobków wirnika
rozróżnia się:
maszyny indukcyjne z wirnikiem klatkowym zwykłym;
maszyny indukcyjne z wirnikiem klatkowym głębokożłobkowym;
maszyny indukcyjne z wirnikiem dwuklatkowym .
Wirniki z prętami wysokimi czy tzw. dwuklatkowe wykorzystują zjawisko wypierania
prądu (zjawisko naskórkowości). Wynikiem, czego jest zmniejszenie prądów rozruchowych
przy jednoczesnym zwiększeniu momentu rozruchowego.
Impedancję fazy silnika można przedstawić schematem, który podano na rys 2.1.
Rys. 2.1 Schemat zastępczy silnika indukcyjnego na fazę
3
Z1 – impedancja fazy stojana
R1-rezystancja fazy stojana
R’2-tzw. sprowadzona rezystancja wirnika na fazę stojana
X1-reaktancja rozproszenia fazy stojana
X’2-sprowadzona na stojan reaktancja rozproszenia wirnika
RFe- umowny opór odwzorowujący straty mocy czynnej w jarzmie stojana
Xreaktancja reprezentująca wirujące pole magnetyczne
s- poślizg
U1-napięcie fazowe
I1-prąd fazowy
U1- SEM indukowana w fazie przez wypadkowe pole magnetyczne w szczelinie
Moc przekazywana elektromagnetycznie przez wirujące pole do wirnika jest opisana
wzorem:
R
'
P
3 2(I'2)2
e
s
(2.4)
-współczynnik 3 wynika z liczby faz
Moment elektromagnetyczny ogólnie będzie stosunkiem mocy Pe do prędkości
kątowej wirującego pola, czyli:
M
Pe
1
Pe
2f1
pb
(2.5)
Prąd pobierany przez fazę silnika wynosi:
I 1=
U1
Z1
(2.6)
4
gdzie:
Z 1 Z 1 R1 jx1
jx (
R' 2
jX ' 2 )
s
R' 2
j ( X ' 2 X )
s
(2.6a)
X z
to moduł, kreska u dołu oznacza daną wielkość jako
gdzie: j- liczba urojona, symbol
wektor, X z tzw. reaktancja zwarcia, (wyrażenie (2.6a) wyprowadzono w oparciu o
schemat z rys. 2.1 pomijając RFe )
Posługując się metoda prądów oczkowych ze schematu z rys. 2.1 można
wyprowadzić wyrażenie na prąd I 2' , który wynosi
I'2
jX U1
R'2
Z
j 1
s
(2.7)
Ostatecznie moment elektromagnetyczny będzie opisany:
R
'2
X
2
U
s
M
3
p
l 1
b
2
R
'
Z
2
1 ( 2)
(X
'2)2
s
1
1
pb
R' 2
s
2
1
U
(1 1 ) 2
R'
( R1 2 ) 2 ( X 1 X ' 2 ) 2
s
(2.8)
X z
gdzie; 1 X 1 / X
X z tzw. reaktancja zwarcia, l
X
1
5
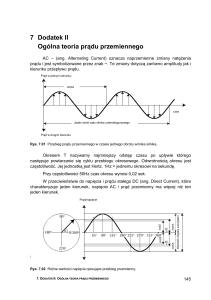
Przebieg momentu i prądu zasilającego przedstawiono na rys. 2.2
M n – moment znamionowy
I n – prąd znamionowy
n1 - prędkość wirującego pola
Rys. 2.2 Przebieg prądu zasilającego I 1 i momentu obrotowego M silnika indukcyjnego.
Moment elektromagnetyczny może być także opisany przybliżonym wzorem,
którego podstawą są parametry eksploatacyjne silnika jak przeciążalność momentem, moc
znamionowa (moc mechaniczna na wale), prędkość znamionowa.
Wzór ten ma postać:
M
2
s sk
M max
sk
s
(2.9)
lub
M
gdzie;
M max M n ,
2 M max
s sk
sk
s
Mn
(2.10)
Pn
,
2
nn
60
przeciążalnośc momentem
6
Wartość poślizgu krytycznego przy którym M M max można wyznaczyć w
oparciu o daną wartość i warunki znamionowe dla których n nn ;
M Mn
Charakterystycznym zjawiskiem dla silników indukcyjnych jest duża wartość prądu
rozruchowego (n 0) . Prąd ten osiąga wartość rzędu (5 6) I n
Innym
charakterystycznym
zjawiskiem
jest
przebieg
momentu
elektromagnetycznego na tzw. roboczej części nazywanej także częścią stabilną.
Jest to odcinek na którym dociążenie powoduje odpowiedni wzrost momentu
elektromagnetycznego.Odcinek ten jak wynika z rys. 2.2 jest w zakresie poślizgów:
s k s 0 i ma postać linii prostej. Nachylenie zależy od poślizgu krytycznego, który
zwykle wynosi s k 0,1 0,2 Oznacza to, że nachylenie jest małe lub inaczej zmiana
prędkości wywołana zmiana obciążenia jest mała. O takiej charakterystyce mówi się, że jest
sztywna. Na rys. 2.3 przedstawiono odwrócone zależności M(n) tj. n(M) która nazywa jest
także charakterystyką mechaniczną.:
Rys. 2.3 Przebieg charakterystyki mechanicznej t.j zależności n(M) silnika indukcyjnego.
Zmiana n wywołana dociążeniem z biegu jałowego (n n1 ) do warunków znamionowych
odniesiona do n1 jest rzędu n / n1 0,03 0,05
7
3. Stany pracy silnika.
3.1. Stan jałowy.
Biegiem jałowym silnika indukcyjnego nazywa się taki stan jego pracy w którym do
uzwojeń stojana przyłożone jest napięcie, a wał silnika nie jest obciążony żadnym momentem.
Wtedy w silniku wytwarza się bardzo mały moment równoważący niewielki moment od sił
tarcia łożyska i od sił tarcia wirnika o powietrze. Dlatego też prąd w wirniku jest bardzo mały.
W stojanie silnika indukcyjnego płynie wtedy prąd składający się z prądu wirnika
sprowadzonego do stojana i z prądu magnesującego oraz z prądu idącego na pokrycie strat w
stali. Ponieważ w stanie jałowym prąd w wirniku potrzebny do wywołania małego momentu jest
bardzo mały, to i siła elektromotoryczna w uzwojeniu wirnika potrzebna do wywołania prądu o
małej wartości jest mała, a wobec tego i poślizg oznaczony przy biegu jałowym przez s0 jest
mały i wynosi:
s0 0,001.
W wyniku tego częstotliwość prądów wirnika f2 = s0 f1 jest bardzo mała. Po przyjęciu takich
warunków można pominąć straty mechaniczne oraz straty w uzwojeniu i rdzeniu wirnika.
W stanie biegu jałowego z uwagi na małą wartość poślizgu
R2
,tzw. oczko wirnika (gałąź z
s
prądem I’2 ) zostaje otwarte. Schemat zastępczy silnika na fazę jest taki jak na rys. 3.1 .
I1=I0 X1
R1
I0
U1
RFe
I
X
Rys. 3.1 Impedancja fazy w stanie biegu jałowego.
8
Moc czynna pobierana przez silnik w stanie biegu jałowego jest opisana (wielkości
pomiarowe dla tego stanu w celu odróżnienia od innych stanów pracy będą oznaczone z
indeksem ‘0’).
P
3
U
I
cos
P
P
P
0
0
0
0
Fe
mech
Cu
1
(3.2)
gdzie:
PFe - straty powstałe w żelazie;
Pmech - straty mechaniczne;
PCu 1 – straty w uzwojeniu stojana.
Prąd biegu jałowego typowych silników asynchronicznych wynosi przy zasilaniu napięciem
znamionowym I0=(0,250,5)IN. O wartości prądu jałowego decyduje moc maszyny i prędkość
obrotowa wirnika. Przyczyną dużego prądu jałowego jest także wielkość szczeliny powietrznej
pomiędzy wirnikiem i stojanem. Przy powiększeniu szczeliny wzrasta prąd jałowy. Na wartość
prądu jałowego ma wpływ także kształt żłobków stojana. W stojanie z żłobkami zamkniętymi
prąd jałowy jest mniejszy niż w stojanie z żłobkami otwartymi. Jest to spowodowane
efektywnym zmniejszeniem szczeliny powietrznej. W maszynie indukcyjnej w stanie jałowym
współczynnik mocy wynosi cosφ0=(0,10,2). Tak mały współczynnik mocy stanowi jedną z
wad silnika asynchronicznego.
Wykres charakterystyk biegu jałowego przedstawiono na rys.3.3
Rys 3.3 Charakterystyki biegu jałowego
9
3.2.Stan zwarcia.
Zwarciem maszyny indukcyjnej nazywa się taki stan, kiedy do uzwojenia stojana
doprowadzone jest napięcie i wirnik jest zahamowany. Wtedy w uzwojeniu wirnika płyną prądy
o częstotliwości takiej samej jak w uzwojeniu stojana ( częstotliwości sieci) .
Siła elektromotoryczna indukowana podczas rozruchu w uzwojeniu wirnika jest duża.
Pomimo znacznego oporu indukcyjnego uzwojenia wirnika prąd, jaki popłynie wtedy w
zwartym uzwojeniu będzie znaczny. W chwili rozruchu każdy silnik indukcyjny znajduje się
przez bardzo krótki czas w stanie zwarcia. Dlatego znajomość wartości prądu zwarcia jest
bardzo ważna, gdyż prąd zwarcia jest zarazem prądem rozruchu silnika indukcyjnego.
Najmniejszy prąd zwarcia (rozruchowy) uzyskiwany jest w silniku dwuklatkowym i
głębokożłobkowym. Przy zasilaniu napięciem znamionowym silnik asynchroniczny pobiera
prąd zwarcia, który w typowych maszynach wynosi IZ(48)IN. W stanie zwarcia pojawia się
pojęcie napięcia zwarcia UZ. Jest to napięcie, jakie należy doprowadzić do uzwojenia stojana,
aby otrzymać prąd znamionowy po stronie zasilania.
Pomiar prądu zwarcia IZ przy zasilaniu napięciem znamionowym jest niemożliwy ze
względu na grzanie maszyny i moc źródła zasilania. Aby otrzymać prąd zwarcia należy
skorzystać z następującej zależności:
IZ IX
UN
UX
(3.4)
gdzie:
UX – obniżone napięcie zasilania;
IX – prąd przy obniżonym napięciu UX;
UN – napięcie znamionowe w stanie zwarcia
Współczynnik mocy cosφz silnika indukcyjnego wynosi ok. 0,5 w silnikach małych rzędu
kilku kilowatów i maleje ze wzrostem mocy silnika indukcyjnego do wartości ok. 0,2 w
silnikach o mocy rzędu kilkuset kilowatów.
10
Wykres charakterystyk stanu zwarcia przedstawiono na rys. 3.5 , charakterystyki te w
odróżnieniu od innych oznaczono indeksem z.
Rys 3.5 Charakterystyki stanu zwarcia
3.3.Stan obciążenia.
Obciążając silnik prędkość obrotowa zmniejsza się w wyniku czego poślizg rośnie.
Częstotliwość indukowanych prądów w wirniku wynosi f2=sf1. Rośnie więc f2 i siła
elektromotoryczna indukowana w uzwojeniu wirnika. Na skutek tego prąd w uzwojeniu wirnika
wzrośnie przy zachowaniu prawie tego samego kąta czasowego pomiędzy prądem wirnika a siłą
elektromotoryczną wirnika, czyli przy zachowaniu prawie tego samego kąt czasowego
pomiędzy prądem wirnika a wirującym strumieniem magnetycznym silnika indukcyjnego.
Nastąpi wzrost momentu obrotowego silnika. Wzrost prądu wirnika, będący prądem
czynnym spowoduje wzrost składowej czynnej prądu pobranej z sieci przez uzwojenie stojana
silnika indukcyjnego. W wyniku tego zwiększy się prąd całkowity stojana I1 oraz powiększy się
współczynnik mocy cosφ1 po stronie pierwotnej.
11
Wykres charakterystyk elektromechanicznych przedstawiono na rys.3.6
`
Rys 3.6 Charakterystyki elektromechaniczne
gdzie:
P- moc oddawana
- sprawność
n- prędkość obrotowa
P1-moc czynna pobierana z sieci
4.Stanowisko badawcze
Należy zmontować układ pomiarowy według rys. 4.1a lub 4.1b . Badany silnik sprzęgnięty
jest z drugim identycznym silnikiem, który pełni rolę hamulca. W celu uzyskania efektu
hamowania uzwojenie stojana zasila się napięciem stałym (hamowanie dynamiczne). Prąd stały
płynąc przez hamulec wywołuje moment hamujący. Moment ten jest proporcjonalny do prądu.
Prąd nie może jednak przekraczać wartości znamionowej. Na czas rozruchu silnika
amperomierz i cewka prądowa watomierza mają być zwarte (prąd rozruchowy nawet 5IN !) . Do
pomiaru prędkości służy bezdotykowy tachometr . Miernik ten posiada fotooptyczny ustrój
pomiarowy. Impulsy świetlne odbite od naklejonego na wale wirnika paska z folii są zliczane
(pełen obrót-jeden impuls) i na podstawie czasu między jednym i drugim impulsem
dokonywany jest pomiar prędkości.
UWAGA: W czasie pomiarów należy wyłączyć oświetlenie w postaci lamp jarzeniowych. Do
oświetlenia używać lampy warsztatowej.
12
Pomiar prędkości powinien być sprawdzony, dokonuje się tego z wykorzystaniem efektu
stroboskopowego. W tym celu przełącznikiem funkcyjnym ze stanu tachometr przełącza się
miernik na lampę stroboskopową. Wstępnie nastawioną częstotliwość błysków koryguje się
regulacją dokładną. Przy pełnej synchronizacji błysków z prędkością obrotową uzyskuje się
wrażenie „nieruchomego wirnika”. Obie zmierzone prędkości powinny być identyczne.
A
B
C
0
AT
V1 V2
*
*
1
*W
W
2*
A1
A
A2
V
A
B
M~
C
Mh
Rys. 4.1a Schemat układu połączeń stanowiska badawczego z użyciem dwóch watomierzy
(układ Arona) .
13
Mh- Silnik hamujący
M~- Silnik badany
A
B
C
0
V
A
*
W*
R
R
0'
R
A
B
C
Mr
Rys. 4.1b Układ pomiarowy z jednym watomierzem i sztucznym zerem-punkt 0’.
Schemat z rys. 4.1b jest przeznaczony do pomiarów odbiornika symetrycznego. Punkt 0’ jest to
tzw. sztuczne zero o potencjale odbiornika, do którego podłącza się koniec cewki napięciowej
watomierza.
14
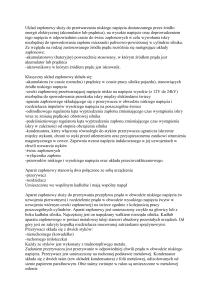
5.Program badań silnika indukcyjnego klatkowego.
5.1.Pomiar rezystancji uzwojenia stojana.
Pomiar rezystancji uzwojenia stojana przeprowadza się w stanie zimnym. Znajomość
rezystancji uzwojenia jest potrzebna także do wyznaczania strat mocy czynnej wydzielanej w
uzwojeniu stojana, oraz do wyznaczania parametrów schematu zastępczego maszyny.
Pomiaru rezystancji dokonuje się metodą techniczną w układzie jak na rys.5.1.
A
A
Rr
220 V
B
M
V
C
Rys. 5.1 Układ pomiarowy rezystancji stojana
Podczas pomiaru rezystancji pod wpływem prądu pomiarowego w uzwojeniu wydzielają
się straty mocy. Aby je zminimalizować należy prąd pomiarowy ograniczyć do 20% wartości
prądu znamionowego silnika IN. Gdy pomiar wykonuje się szybko można pominąć zmianę
temperatury uzwojenia badanego.
15
Rezystancje fazowe silnika połączonego w gwiazdę są obliczane według następujących
zależności:
R
R
R
R
AB AC BC
A
2
(5.2)
R
R
R
AB
BC
CA
R
B
2
(5.3)
R
R
R
R
CA BC AB
C
2
(5.4)
gdzie:
RA(B)(C)-rezystancje faz A,B,C
RAB, RAC, RBC-rezystancje mierzone ze strony zacisków A,B i C.
Wyniki pomiarów i obliczeń należy umieścić w tabeli 5.5.
tabela 5.5.
wielkości mierzone
I
U
Lp. uzwojenia
A
V
1
A-B
2
B-C
3
C-A
wielkości obliczeniowe
RX
RA
RB
RC
5.2. Pomiar stanu jałowego.
Pomiar biegu jałowego jest przeprowadzany bez włączonego obciążenia.
Badany silnik jest stale połączony z drugim silnikiem, ale nie włącza się prostownika. Pomiary
biegu jałowego przeprowadzamy w celu określenia właściwości obwodu magnetycznego i
określenia strat jałowych maszyny. Dodatkowo otrzymuje się parametry gałęzi poprzecznej.
Pomiary charakterystyk biegu jałowego silnika wykonuje się w układzie pomiarowym,
którego schemat ideowy przedstawiono na rys. 4.1. Pomiary silnika w stanie jałowym
rozpoczynamy od zasilania stojana napięciem o wartości 1,1 napięcia znamionowego, obniżając
je stopniowo. Pomiary należy przerwać gdy podczas obniżania napięcia zaczyna wzrastać prąd.
Na podstawie pomiarów napięcia, prądu oraz mocy oblicza się:
moc pobieraną z sieci;
16
P0 P
1 P
2
(5.6)
gdzie P1, P2,-wskazania obu watomierzy
lub
P0 3Pw
(5.7)
(układ jednego watomierza ze sztucznym punktem zerowym-rys.4.1b)
współczynnik mocy silnika biegu jałowego;
cos
0
P
0
3
U
0I
0
(5.8)
tzw. prąd magnesujący silnika (prąd ten reprezentuje wypadkowe pole
magnetyczne w szczelinie;
I I0 sin
0
(5.9)
gdzie:
2
sin
cos
01
0
(5.10)
straty w żelazie i straty mechaniczne ;
2
P
'
P
P
P
3
R
I
0
Fe
mech
0
1
0
(5.11)
gdzie:
I0 – prąd fazowy uzwojenia stojana w stanie jałowym
R1 – rezystancja fazowa uzwojenia stojana
Z uwagi na małą wartość I0 można przyjmować że :
P
'
P
P
P
0
Fe
mech
0
(5.12)
Straty w rdzeniu tj. PFe są proporcjonalne do kwadratu indukcji magnetycznej, czyli przy
stałej częstotliwości są w przybliżeniu proporcjonalne do kwadratu napięcia zasilającego silnik.
Natomiast straty mechaniczne nie są zależne od napięcia zasilającego. Jak z tego wynika
charakterystyka start jałowych Pj w funkcji napięcia U0 jest w przybliżeniu parabolą drugiego
stopnia przesuniętą wzdłuż osi rzędnych o wartość strat mechanicznych. Zatem zależność
P0' f (U02) jest linią prostą. Z tej zależności wynika rozdział strat jałowych na straty w rdzeniu
i mechaniczne.
Na podstawie pomiarów i obliczeń parametrów biegu jałowego można wyznaczyć
parametry gałęzi poprzecznej schematu zastępczego maszyny:
17
U02
RF
PF
X
U0
3I
Wyniki pomiarów i obliczeń należy umieścić w tabeli 5.13
Na podstawie pomiarów i obliczeń zamieszczonych w tabeli 5.13 należy wykreślić
następujące charakterystyki:
- zależność mocy czynnej pobieranej z sieci P0, strat jałowych Pj, prądu fazowego I0,
współczynnika mocy cosφ0 od napięcia zasilania U0
2
- zależność strat jałowych P0’ od kwadratu napięcia zasilającego U 0 zależnośc ma postac linii
prostej
Tabela 5.13 Wyniki pomiarów z próby biegu jałowego
lp. f
Hz
1
2
3
4
5
6
7
wielkości zmierzone
U0
I0
P1
P2
V
A
W
W
U
n0
obr
min
2
0
2
V
P0
W
wielkości obliczeniowe
cosφ0 I
P0’
PFe Pmech
A
W
W
W
RFe X
8
9
10
5.3 Badanie stanu zwarcia
Pomiar stanu zwarcia prowadzić przy zatrzymanym wale silnika. Pomiary stanu zwarcia
przeprowadza się w celu określenia właściwości rozruchowych maszyny, oraz wyznaczenia strat
w uzwojeniach. Dodatkowo otrzymuje się parametry gałęzi wzdłużnej tj. R1, R2’,X1,X2’.
Pomiar charakterystyk stanu zwarcia silnika wykonuje się w układzie pomiarowym,
którego schemat ideowy przedstawiono na rys.4.1a lub 4.1b .Przez zastosowanie ruchomego
zawieszenia hamulca, które połączono ramieniem z dynamometrem można odczytać moment
rozruchowy. Pomiary silnika w stanie zwarcia rozpoczyna się od zasilania stojana napięciem o
18
takiej wartości, przy, której prąd stojana osiąga wartość 1,2IN. Następne punkty pomiaru
wykonuje się poprzez obniżenie napięcia.
Na podstawie pomiarów napięcia, prądu, siły oraz mocy oblicza się:
moment rozruchowy silnika;
gdzie:
MR l F
(5.14)
PZ P
1 P
2
(5.15)
Pz 3Pw (rys. 4.1b)
(5.16)
l=0,2[m]
moc pobierana z sieci;
lub
współczynnik mocy silnika w stanie zwarcia;
cos
Z
P
Z
3
U
ZI
Z
(5.17)
impedancja zwarcia silnika;
ZZ
UZ
3IZ
(5.18)
rezystancja zwarcia silnika;
P
'
Z
R
R
R
1
2
Z
2
3
IZ
(5.19)
reaktancja zwarcia silnika;
2
2
X
X
X
Z
R
1
2
Z
Z
Z
(5.20)
Z wyników pomiarów i obliczeń zamieszczonych w tabeli 5.21 wykreśla się następujące
charakterystyki: zależność mocy czynnej pobieranej z sieci PZ, prądu fazowego IŻ,
współczynnika mocy cosφZ, momentu rozruchowego MR, impedancji zwarcia silnika ZZ,
rezystancja zwarcia silnika RZ oraz reaktancja zwarcia silnika XZ od napięcia zasilania w stanie
zwarcia UZ.
19
Tabela 5.21 Wyniki pomiarów z próby zwarcia.
wielkości zmierzone
UZ
IZ
lp. f
Hz
V
A
1
2
3
4
5
6
7
8
P1
W
P2
W
wielkości obliczeniowe
F
MR
P
cosZ ZZ
N
Nm
W
RZ
XZ
5.4Badanie stanu obciążenia.
Pomiary przy obciążeniu wykonuje się celem wyznaczenia tzw. charakterystyk
elektromechanicznych silnika. Pomiary stanu obciążenia przeprowadza się z włączonym
obciążeniem. Pomiary silnika w stanie obciążenia wykonuje się przy napięciu znamionowym.
Pomiary rozpocząć od przeciążenia maszyny, podczas, którego prąd pobierany z sieci
jest równy 1,2IN. Kolejne pomiary dokonuje się zmniejszając stopniowo obciążenie. Napięcie
zasilające w czasie pomiarów ma być stałe. Przez zastosowanie ruchomego zawieszenia
hamulca, które połączono ramieniem z dynamometrem można odczytywać moment obciążenia.
Na podstawie wskazań przyrządów oblicza się:
Moment obciążenia silnika:
gdzie:
M l F
(5.22)
P P1 P2
(5.23)
P 3Pw
(5.24)
l=0,2[m]
Moc pobierana z sieci:
lub
20
Współczynnik mocy silnika w stanie obciążenia:
cos
P
(5.25)
3U
I
Moc użyteczna na wale silnika:
2
P
P
n
M
mech
h
60
(5.26)
Współczynnik sprawności silnika:
P
Ph
(5.27)
Poślizg silnika:
s
n1 n
n1
(5.28)
Wyniki pomiarów i obliczeń należy umieścić w tabeli 5.29.
Na podstawie pomiarów i obliczeń zamieszczonych w tabeli 5.4 należy wykreślić
następujące charakterystyki:
- zależnośc prądu fazowego I 1 , mocy czynnej pobieranej z sieci P, współczynnika mocy cos
momentu elktromagnetycznego M, predkości obrotowej n oraz sprawności w funkcji mocy
mechanicznej Pmech
-
zależności prędkości obrotowej n oraz prądu fazowego I 1 od momentu
elektromagnetycznego
Tabela 5.29.
lp.
wielkości zmierzone
f
U
I
P1
Hz
V
A
W
P2
W
n
obr
min
F
N
wielkości obliczone
P
M
s
W
Nm
-
cosφ
-
-
Ph
W
1
2
3
4
5
6
7
8
9
10
21
W przypadku gdyby stanowisko laboratoryjne nie posiadało ruchomego mocowania
stojana i niemożliwy byłby bezpośredni pomiar momentu M, moment ten neleży wyliczyć ze
wzoru (2.8).
(Prowadzący podaje wartości reaktancji X 1 , X 2 , X oraz rezystancji R' 2
6.Pytania kontrolne
6.1.Jaki stan nazywa się stanem biegu jałowego silnika indukcyjnego?
6.2.Od czego zależy wartość prądu jałowego silnika indukcyjnego?
6.3.Kiedy silnik podczas normalnej pracy znajduje się w stanie zwarcia?
6.4.Jaka jest częstotliwość w wirniku maszyny indukcyjnej w stanie zwarcia?
6.5.Co to jest napięcie zwarcia i jak je zmierzyć?
6.6.Dlaczego silnik przy braku jednej fazy zasilającej nie wykazuje momentu
rozruchowego?
22