Controller
VKR C2 edition2005
Specyfikacja
Stan: 26.07.2010
Wersja: Spez VKR C2 ed05 V2 pl
KUKA Roboter GmbH
VKR C2 edition2005
© Copyright 2010
KUKA Roboter GmbH
Zugspitzstraße 140
D-86165 Augsburg
Niemcy
Niniejsza dokumentacja może być powielana i udostępniana osobom trzecim – także we
fragmentach – wyłącznie za jednoznaczną zgodą KUKA Roboter GmbH.
Układ sterowania może posiadać dalsze, nie opisane w niniejszej dokumentacji funkcje. Przy
dostawie nowego układu sterowania i/lub w przypadku serwisowym klient nie ma jednak prawa żądać
udostępnienia mu tych funkcji.
Treść publikacji została sprawdzona pod względem zgodności z opisanym osprzętem i
oprogramowaniem. Mimo to nie jest możliwe całkowite wykluczenie różnic, w związku z czym nie
gwarantujemy całkowitej zgodności dokumentacji ze stanem faktycznym. Informacje zawarte w
niniejszej publikacji są jednak regularnie sprawdzane, a wymagane poprawki są uwzględniane w
kolejnych wydaniach.
Zmiany techniczne nie mające wpływu na działanie zastrzeżone.
Przekład: dokumentacja w oryginale
KIM-PS5-DOC
Publication:
Pub Spez VKR C2 ed05 pl
Book structure: Spez VKR C2 ed05 V2.1
Label:
2 / 101
Spez VKR C2 ed05 V2
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
Spis treści
Spis treści
1
Opis produktu ..............................................................................................
7
1.1
Przegląd robota przemysłowego ................................................................................
7
1.2
Układ sterowania robota Đ zestawienie .....................................................................
7
1.3
Opis komputera sterującego ......................................................................................
8
1.3.1
Interfejsy komputera sterującego ..........................................................................
9
1.3.2
Przyporządkowanie styków PCI ...........................................................................
10
Opis panelu sterowniczego KUKA Control Panel (VKCP) .........................................
11
Strona przednia ....................................................................................................
11
1.4
1.4.1
1.4.2
Strona tylna ...........................................................................................................
12
Logiczny układ bezpieczeństwa Electronic Safety Circuit (ESC) ...............................
12
Płyty CI3 - zestawienie .........................................................................................
14
1.6
Opis modułu zasilającego ..........................................................................................
14
1.7
1.5
1.5.1
Opis złączy .................................................................................................................
15
1.7.1
Przyłącze sieciowe XS1 ........................................................................................
16
1.7.2
Wtyczka VKCP X19 ..............................................................................................
18
1.7.3
Wtyczka silnika X20 osi 1 do 6 .............................................................................
19
1.7.4
Wtyczka silnika X7 (fakultatywnie) ........................................................................
20
1.7.5
Przewód transmisji danych X21 oś 1 do 8 ............................................................
21
Dane techniczne ..........................................................................................
23
2
2.1
Układ sterowania robota ............................................................................................
23
2.2
Wymiary układu sterowania robota ............................................................................
25
2.3
Minimalne odstępy układu sterowania robota ............................................................
26
2.4
Minimalne odległości od szafy nadstawianej i technologicznej ..................................
27
2.5
Wymiary otworów mocowania do podłogi ..................................................................
27
2.6
Zasięg skrzydeł drzwi szafy .......................................................................................
28
3
Bezpieczeństwo ...........................................................................................
29
3.1
Informacje ogólne ......................................................................................................
29
3.1.1
Informacja o zakresie odpowiedzialności cywilnej ................................................
29
3.1.2
Zgodne z przeznaczeniem użytkowanie robota przemysłowego ..........................
29
3.1.3
Deklaracja zgodności z normami WE i deklaracja montażu .................................
30
3.1.4
Używane pojęcia ...................................................................................................
31
3.2
Personel .....................................................................................................................
31
3.3
Obszar roboczy, strefa bezpieczeństwa i strefa zagrożenia ......................................
33
3.4
Zdarzenie wyzwalające zatrzymanie ........................................................................
34
3.5
Funkcje bezpieczeństwa ............................................................................................
35
3.5.1
Przegląd funkcji bezpieczeństwa ..........................................................................
35
3.5.2
Układ bezpieczeństwa ESC ..................................................................................
35
3.5.3
Przełącznik trybów roboczych ..............................................................................
36
3.5.4
Ochrona operatora ................................................................................................
37
3.5.5
Urządzenie ZATRZYMANIA AWARYJNYEGO ....................................................
38
3.5.6
Zewnętrzne urządzenie ZATRZYMANIA AWARYJNEGO ...................................
39
3.5.7
Przycisk akceptacji ...............................................................................................
39
3.5.8
3.6
3.6.1
Zewnętrzny przycisk akceptacji ............................................................................
40
Dodatkowe wyposażenie ochronne ...........................................................................
40
Tryb impulsowy .....................................................................................................
40
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
3 / 101
VKR C2 edition2005
3.6.2
Wirtualne łączniki krańcowe .................................................................................
41
3.6.3
Mechaniczne ograniczniki krańcowe ....................................................................
41
3.6.4
Mechaniczny ogranicznik zakresu osi (opcja) ......................................................
41
3.6.5
Układ monitorowania zakresu osi (opcja) .............................................................
42
3.6.6
Mechanizm swobodnego obrotu (opcja) ...............................................................
42
3.6.7
Łącznik KCP (opcja) .............................................................................................
42
3.6.8
Oznaczenia na robocie przemysłowym ................................................................
43
3.6.9
4 / 101
Zewnętrzne urządzenia ochronne ........................................................................
43
3.7
Przegląd trybów pracy i funkcji ochronnych ..............................................................
44
3.8
Środki bezpieczeństwa ..............................................................................................
44
3.8.1
Ogólne środki bezpieczeństwa .............................................................................
44
3.8.2
Sprawdzanie elementów sterowania decydujących o bezpieczeństwie ...............
45
3.8.3
Transport ..............................................................................................................
46
3.8.4
Pierwsze i ponowne uruchamianie .......................................................................
46
3.8.5
Ochrona antywirusowa i bezpieczeństwo sieci ....................................................
49
3.8.6
Praca ręczna ........................................................................................................
49
3.8.7
Symulacja .............................................................................................................
50
3.8.8
Tryb automatyczny ...............................................................................................
50
3.8.9
Konserwacja i naprawa ........................................................................................
50
3.8.10
Wycofanie z eksploatacji, składowanie i usuwanie ..............................................
52
3.8.11
Działania bezpieczeństwa w zasadzie "Single Point of Control" ..........................
52
3.9
Stosowane normy i przepisy ......................................................................................
53
4
Plan ...............................................................................................................
55
4.1
Przegląd planu ...........................................................................................................
55
4.2
Kompatybilność elektromagnetyczna (EMC) .............................................................
55
4.3
Warunki ustawienia ...................................................................................................
56
4.4
Warunki przyłączenia ................................................................................................
58
4.5
Przyłącze sieciowe za pośrednictwem wtyczki CEE XS1 .........................................
59
4.6
Podłączanie obwodu ZATRZYMANIA AWARYJNEGO i zabezpieczenia .................
60
4.7
Interfejsy VW i Audi ...................................................................................................
61
4.7.1
Interfejs VW ..........................................................................................................
61
4.7.1.1
Interfejs VW XS2 ..................................................................................................
62
4.7.1.2
Interfejs VW XS2 z kartą CI3-Tech ......................................................................
64
4.7.1.3
Interfejs VW XS3 ..................................................................................................
66
4.7.2
Interfejs Audi ........................................................................................................
67
4.7.2.1
Interfejs Audi XS2 .................................................................................................
68
4.7.2.2
Interfejs Audi XS2 z kartą CI3-Tech-Board ..........................................................
70
4.7.2.3
Interfejs Audi XS3 .................................................................................................
72
4.7.2.4
Interfejs Audi XS5 .................................................................................................
73
4.7.2.5
Interfejs Audi XS5 z kartą CI3-Tech-Board ..........................................................
74
4.8
Wyrównanie potencjałów PE .....................................................................................
75
4.9
Wizualizacja łącznika KCP (opcja) ...........................................................................
76
4.10 Poziom zapewnienia bezpieczeństwa .......................................................................
76
4.10.1
Wartości PFH funkcji zabezpieczających .............................................................
76
5
Transport ......................................................................................................
79
5.1
Transport za pomocą uprzęży transportowej ............................................................
79
5.2
Transport za pomocą wózka podnośnikowego .........................................................
80
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
Spis treści
5.3
Transport za pomocą wózka widłowego ....................................................................
80
5.4
Transport na wózkach kołowych (opcja) ....................................................................
81
6
Pierwsze i ponowne uruchamianie ............................................................
83
6.1
Zestawienie Uruchamianie .........................................................................................
83
6.2
Ustawianie sterownika robota. ...................................................................................
85
6.3
Podłączania przewodów łączących ...........................................................................
85
6.4
Podłączenie VKCP .....................................................................................................
86
6.5
Podłączenie wyrównania potencjałów PE ..................................................................
86
6.6
Podłączyć sterownik silnika do sieci ..........................................................................
86
6.7
Usuwanie zabezpieczenia przed rozładowaniem akumulatora .................................
86
6.8
Podłączanie obwodu ZATRZYMANIA AWARYJNEGO i zabezpieczenia .................
87
6.9
Konfiguracja i podłączenie wtyków XS2/XS3/XS5 (Audi) ..........................................
87
6.10 Włączanie układu sterowania robota .........................................................................
87
6.11 Sprawdzenie kierunku obrotu wentylatora zewnętrznego ..........................................
87
7
Serwis KUKA ................................................................................................
89
7.1
Pomoc techniczna ......................................................................................................
89
7.2
Biuro obsługi klienta KUKA ........................................................................................
89
Index .............................................................................................................
97
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
5 / 101
VKR C2 edition2005
6 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
1. Opis produktu
1
Opis produktu
1.1
Przegląd robota przemysłowego
Robot przemysłowy składa się z następujących komponentów:
Manipulator
Układ sterowania robota
Programator
Przewody łączące
Oprogramowanie
Opcje, akcesoria
Rys. 1-1: Przykład robota przemysłowego
1
2
1.2
Manipulator
Przewody łączące
3
4
Układ sterowania robota
Programator
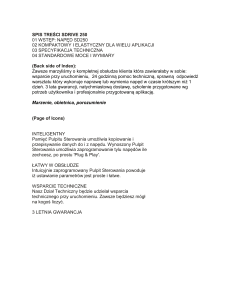
Układ sterowania robota – zestawienie
System sterowania robota składa się z następujących komponentów:
Komputer sterujący
Moduł zasilający
Programator VKCP
Układ bezpieczeństwa ESC
Panel przyłączeniowy
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
7 / 101
VKR C2 edition2005
Rys. 1-2: Układ sterowania robota – plan
1
2
3
4
5
1.3
Funkcje
Opis
8 / 101
Moduł zasilający
Komputer PC sterujący
Elementy obsługi i wskazań
łącznika KCP (opcja)
VKCP
Przestrzeń dla podzespołów
klienta
6
7
8
Układ bezpieczeństwa (ESC)
Karta łącznika KCP (opcja)
Panel przyłączeniowy
9
Gniazdo serwisowe (opcja)
Opis komputera sterującego
Komputer steruje za pomocą wymiennych komponentów wtykowych
wszystkimi funkcjami układu sterowania.
Interfejs graficzny systemu operacyjnego Windows z funkcjami
wizualizacji i wprowadzania danych
Funkcje tworzenia, korygowania, archiwizowania i konserwacji
programów
Sterowanie procesami
Projektowanie torów
Sterowanie obwodem napędów
Nadzór
Elementy obwodu zabezpieczającego ESC
Komunikacja z zewnętrznymi urządzeniami peryferyjnymi (inne układy
sterowania, komputer główny, komputery, sieć)
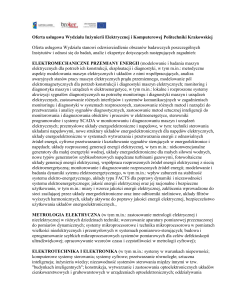
Na komputer układu sterującego składają się następujące komponenty:
Płyta główna ze złączami
Procesor i pamięć
Twardy dysk
Napęd dyskietek (opcja)
Napęd CD-ROM (opcja)
MFC3
KVGA
DSE-IBS-C33
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
1. Opis produktu
Akumulatory
Podzespoły opcjonalne, np. karty magistrali feldbus
Rys. 1-3: Komputer układu sterowania - zestawienie
1
2
3
1.3.1
Komputer PC sterujący
Standardowe złącza PC
Wentylator PC
4
5
6
Napęd FD w drzwiach (opcja)
Napędy (opcja)
Akumulatory
Interfejsy komputera sterującego
Opis
Rys. 1-4: Porty komputera sterującego
Poz.
1
2
Złącze (interfejs)
Wtyczki PCI 1 do 6
(>>> 1.3.2 "Przyporządkow
anie styków PCI" strona 10)
Wtyczka AGP PRO
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
Poz.
Złącze (interfejs)
9
Podłączenie klawiatury
10
Podłączenie myszy
9 / 101
VKR C2 edition2005
Poz.
1.3.2
Złącze (interfejs)
Poz.
3
USB 2x
11
4
X804 Ethernet
12
5
6
Szeregowy interfejs COM 1
Równoległy interfejs LPT1
13
14
7
Szeregowy interfejs COM 2
15
8
USB 2x
Złącze (interfejs)
X961 Zasilanie napięciem
DC 24 V
Szeregowy interfejs ST5
czasu rzeczywistego COM
3
ST6 ESC/KCP itp.
ST3 magistrala napędu do
KPS600
Szeregowy interfejs
enkodera ST4 X21
Przyporządkowanie styków PCI
Opis
Rys. 1-5: Gniazda PCI
Do wtyczek komputera można podłączyć następujące karty wtykowe:
Wtyczka
1
Karta wtykowa
Karta Interbus (światłowód) (fakultatywnie)
Karta Interbus (miedź) (fakultatywnie)
Karta do skanera LPDN (fakultatywnie)
Karta Profibus Master/Slave (fakultatywnie)
Karta CN_EthernetIP (fakultatywnie)
Karta do skanera LPDN (fakultatywnie)
Karta KVGA
Karta DSE-IBS-C33 AUX (fakultatywnie)
Karta MFC3
Karta sieciowa (fakultatywnie)
2
3
4
5
6
7
10 / 101
Karta do skanera LPDN (fakultatywnie)
Karta Profibus Master/Slave (fakultatywnie)
Karta LIBO-2PCI (fakultatywnie)
Karta modemowa KUKA (fakultatywnie)
wolna
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
1. Opis produktu
1.4
Funkcja
1.4.1
Opis panelu sterowniczego KUKA Control Panel (VKCP)
VKCP (VW KUKA Control Panel) jest programatorem układu sterowania
robota. Panel VKCP jest wyposażony we wszystkie funkcje obsługowe i
wskaźniki, które są konieczne do obsługi i programowania układu sterowania
robota.
Strona przednia
Opis
Rys. 1-6: Strona przednia VKCP
1
2
3
4
5
6
7
8
9
Przełącznik trybów roboczych
Napędy WŁ.
Napędy WYŁ / SSB-GUI
ZATRZYMANIE AWARYJNE
SpaceMouse
Przycisk stanu po prawej
Klawisz Enter
Klawisze kierunkowe
Klawiatura
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
10
11
12
13
14
15
16
17
18
Blok klawiszy numerycznych
Przyciski programowalne
Klawisz Start-Wstecz
Klawisz Start
Klawisz STOP
Przycisk wyboru okna
Klawisz ESC
Przyciski stanu po lewej
Przyciski menu
11 / 101
VKR C2 edition2005
1.4.2
Strona tylna
Opis
Rys. 1-7: Tylna strona VKCP
1
2
3
Opis
Tabliczka znamionowa
Klawisz Start
Przycisk akceptacji
Element
Tabliczka
znamionowa
Klawisz Start
Przycisk
zatwierdzający
4
5
Przycisk zatwierdzający
Przycisk zatwierdzający
Opis
Tabliczka znamionowa VKCP
Przy pomocy klawisza Start uruchomiony zostaje
program.
Przycisk zatwierdzający ma 3 pozycje:
Nie wciśnięty
Pozycja środkowa
Wciśnięty
W trybie pracy T1 lub T2 przycisk zatwierdzający musi
być przytrzymywany w pozycji środkowej, aby robot
mógł być uruchomiony.
W trybie pracy Automatyka zewn. przycisk
zatwierdzający nie posiada żadnej funkcji.
1.5
Opis
12 / 101
Logiczny układ bezpieczeństwa Electronic Safety Circuit (ESC)
Układ bezpieczeństwa ESC (Electronic Safety Circuit) jest 2-kanałowym,
wspomaganym komputerowo systemem zabezpieczeń. Monitoruje on
nieprzerwanie wszystkie podłączone, istotne dla bezpieczeństwa
komponenty. W przypadku usterek lub przerwania obwodu bezpieczeństwa
układ zasilania napięciem wyłącza napędy i tym samym powoduje
zatrzymanie robota.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
1. Opis produktu
System ESC składa się z następujących komponentów:
Płyta CI3
VKCP (master)
KPS600
MFC (pasywny węzeł)
System ESC z peryferią węzłów zastępuje wszystkie złącza standardowe
klasycznego systemu bezpieczeństwa.
Układ bezpieczeństwa ESC monitoruje następujące wejścia:
Lokalne ZATRZYMANIE AWARYJNE
Zewnętrzne ZATRZYMANIE AWARYJNE
Ochrona użytkownika
Przycisk zatwierdzający
Napędy WYŁ.
Napędy WŁ.
Tryby pracy
Wejścia kwalifikujące
Rys. 1-8: Struktura obwodu ESC
1
2
3
4
Węzeł w VKCP
KPS600
Płyta CI3
Łącznik KCP (opcja)
VKCP
5
6
7
MFC3
DSE
Komputer PC
Węzeł w VKCP jest nadrzędny i z tego miejsca następuje inicjacja.
Węzeł otrzymuje dwukanałowe sygnały z:
Przycisk ZATRZYMANIA AWARYJNEGO
Przycisk zatwierdzający
Węzeł otrzymuje jednokanałowe sygnały z:
napędu włączone
Tryb roboczy automatyka zewn.
Tryb roboczy testowania
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
13 / 101
VKR C2 edition2005
W przypadku pracy bez użycia łącznika KCP, należy podłączyć panel KCP
do pracy obwodu ESC. Jeśli panel KCP bez łącznika KCP zostanie
odłączony w trakcie pracy, natychmiast rozłączane są napędy.
Węzeł w KPS
W KPS znajduje się węzeł ESC, który w razie usterki wyłącza stycznik
napędów.
Węzeł na MFC3
Na płycie MFC3 znajduje się bierny węzeł ESC nadzorujący i przekazujący do
układu sterowania robota informacje dotyczące obwodu ESC.
1.5.1
Opis
Płyty CI3 - zestawienie
Płyta CI3 łączy poszczególne węzły systemu ESC z interfejsem klienta.
W zależności od wymagań klienta w sterowniku stosowane są różne płyty:
własny
węzeł
Płyta
CI3-Standard
nie
Opis
Wskazanie następujących
stanów:
Miejscowe ZATRZYMANIE
AWARYJNE
Wskazanie następujących
stanów:
CI3-Extended
tak
Tryby robocze
Miejscowe ZATRZYMANIE
AWARYJNE
Napędy włącz.
Płyta łącząca obwodu ESC i
SafetyBUS p firmy PILZ
Płyta ta potrzebna jest w
przypadku następujących
komponentów:
CI3-Bus
nie
CI3-Tech
tak
KUKA.RoboTeam
KUKA.SafeRobot
Magistrala Safety Gateway
Wyjście do szafy
nadstawianej (osie
dodatkowe)
Zasilanie 2. enkodera przez
X19A
Wskazanie następujących
stanów:
1.6
Opis
Tryby robocze
Miejscowe ZATRZYMANIE
AWARYJNE
Napędy włącz.
Opis modułu zasilającego
Na moduł zasilający składają się następujące komponenty:
14 / 101
Zasilacze
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
1. Opis produktu
Serwoprzetwornica (KSD)
Elementy zabezpieczające
Wentylator
Przełącznik główny
Filtr sieciowy
Rys. 1-9: Moduł zasilający
1
2
3
4
5
6
7
8
9
1.7
Opis
Zasilacz niskiego napięcia KPS-27
Elementy zabezpieczające (24 V, niebuforowane)
Filtr sieciowy
Przełącznik główny (wersja EU)
Wentylator wewnętrznego obiegu chłodzenia
Zasilacz mocy KPS600
KSD dla 2 osi dodatkowych (opcja)
KSD dla 6 osi podstawowych
Elementy zabezpieczające (24 V, buforowane)
Opis złączy
Panel przyłączeniowy układu sterowania robota składa się standardowo z
przyłączy następujących przewodów:
Przewód sieciowy/Zasilanie
Przewody silnika robota
Przewody sterujące robota
Przyłącze VKCP
W zależności od opcji i wariantu danego klienta panel przyłączeniowy może
być różnie wyposażony.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
15 / 101
VKR C2 edition2005
Panel
przyłączeniowy
Rys. 1-10: Panel przyłączeniowy VKR C2
1
2
3
4
Przyłącze sieciowe XS1
Przyłącze silnikowe X20
Przyłącze silnikowe X7
Opcja
9
10
11
12
5
Interfejs XS5 (opcja)
13
6
Interfejs XS2
14
7
Interfejs XS3
15
8
Przepust kablowy XS4
16
Opcja
Złącze VKCP X19
Przyłącze enkodera X21
SL1 przewód uziemiający
robota
SL2 przewód uziemiający
głównego zasilania
X30 przyłącze silnikowe w
skrzynce przyłączeniowej
X30.2 przyłącze silnikowe w
skrzynce przyłączeniowej
X31 przyłącze enkodera w
skrzynce przyłączeniowej
Przyłącze silnikowe X7 stosowane jest w przypadku:
Robotów przeznaczonych do dużych obciążeń:
Robotów z wysokim obciążeniem granicznym
Wszystkie zezwoje ochronne, przekaźnikowe i zaworowe, które są
połączone z układem sterowania robota ze strony klienta, muszą być
wyposażone w odpowiednie diody tłumiące. Człony RC i oporniki VCR nie są
odpowiednie.
1.7.1
Opis
16 / 101
Przyłącze sieciowe XS1
Układ sterowania robota jest podłączony do sieci za pośrednictwem wtyczki
CEE.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
1. Opis produktu
Rys. 1-11
Uwaga!
Podłączenie sterownika robota do sieci bez uziemionego punktu zerowego
może powodować błędne działanie sterownika i uszkodzenia elementów
sieci. W przeciwnym wypadku spowodować obrażenia ciała związane z
porażeniem prądem elektrycznym. Sterownik robota należy podłączać
wyłącznie do sieci z uziemionym punktem zerowym.
* Przewód N konieczny jest tylko w przypadku gniazdka serwisowego przy
sieci 400 V.
Układ sterowania robota przyłączać tylko do sieci elektrycznej
prawoskrętnej. Tylko wtedy zapewniony jest właściwy kierunek obrotu
silników wentylatora.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
17 / 101
VKR C2 edition2005
1.7.2
Wtyczka VKCP X19
Funkcje styków
wtyczek
Rys. 1-12
18 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
1. Opis produktu
1.7.3
Wtyczka silnika X20 osi 1 do 6
Funkcje styków
wtyczek
Rys. 1-13: Wtyk wielostykowy X20 hamowania standard
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
19 / 101
VKR C2 edition2005
1.7.4
Wtyczka silnika X7 (fakultatywnie)
Funkcje styków
wtyczek
Rys. 1-14
20 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
1. Opis produktu
1.7.5
Przewód transmisji danych X21 oś 1 do 8
Funkcje styków
wtyczek
Rys. 1-15: Rozkład końcówek X21
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
21 / 101
VKR C2 edition2005
22 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
2. Dane techniczne
2
Dane techniczne
2.1
Układ sterowania robota
Dane
podstawowe
Przyłącze
sieciowe
Typ szafy
VKR C2 edition2005
Kolor
patrz dostawa
Liczba osi
maks. 8
Ciężar
patrz tabliczka znamionowa
Rodzaj zabezpieczenia
IP 54
Poziom ciśnienia akustycznego
zgodnie z DIN 45635-1
przeciętnie 67 dB (A)
Możliwość dostawiania z lub bez
chłodnicy
Bocznie, odstęp 50 mm
Obciążenie główne przy
równomiernym rozłożeniu
1 000 N
Nominalne napięcie
przyłączeniowe wg DIN/IEC 38
AC 3 x 400 V ... AC 3 x 415 V
Dozwolona tolerancja napięcia
sieciowego
400 V -10 % ... 415 V
Częstotliwości sieciowej
49 ... 61 Hz
Oporność sieci do punktu
podłączenia układu sterowania
robota
≤ 300 mΩ
Nominalna moc wejściowa
7,3 kVA, zob. tabliczka
znamionowa
Standard
Nominalna moc wejściowa
Robot przeznaczony do dużych
obciążeń
Paletyzator
Łącznik pras
Zabezpieczenie sieciowe
Przy zastosowaniu bezpiecznika
automatycznego: Różnica prądu
wyłączającego
Sterowanie
hamulcami
+10 %
13,5 kVA, zob. tabliczka
znamionowa
min. 3x25 A bier., maks. 3x32 A
bier., zob. tabliczka znamionowa
300 mA na każdy układ sterowania
robota, uniwersalny
Wyrównanie potencjałów
Wspólnym punktem neutralnym
przewodów wyrównawczych
potencjału i wszystkich przewodów
uziemiających jest szyna
odniesienia podzespołu mocy.
Napięcia na wyjściu
DC 25 ... 26 V
Prąd wyjściowy hamulców
maks. 6 A
Nadzór
Przerwanie przewodu i zwarcie
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
23 / 101
VKR C2 edition2005
Gniazdo
serwisowe
(opcja)
Natężenie na wyjściu
maks. 4 A
Użytkowanie
Gniazdo serwisowe można używać
wyłącznie do urządzeń kontrolnych
i diagnostycznych.
Warunki
klimatyczne
Temperatura otoczenia podczas
pracy bez chłodnicy
+5 ... 45 ? (278 ... 318 K)
Temperatura otoczenia podczas
pracy z chłodnicą
+5 ... 55 ? (278 ... 328 K)
Temperatura otoczenia podczas
magazynowania i transportu z
akumulatorami:
-25 ... +40 ? (248 ... 313 K)
Temperatura otoczenia podczas
magazynowania i transportu bez
akumulatorów:
-25 ... +70 ? (248 ... 343 K)
Zmiana temperatury
maks. 1,1 K/min
Klasa wilgotności
Wysokość posadowienia
3k3 wg normy DIN EN 60721-3-3;
1995
do 1000 m nad punktem
zerowym poziomu odniesienia
bez ograniczenia mocy
1000 m … 4000 m nad punktem
zerowym poziomu odniesienia z
ograniczeniem mocy 5 %/1000
m
Uwaga!
Aby zapobiec całkowitemu rozładowaniu akumulatorów, trzeba je ładować w
regularnych odstępach czasu w zależności od temperatury magazynowania.
W temperaturze magazynowania +20 °C lub niższej akumulatory trzeba
ładować co 9 miesięcy.
W temperaturze magazynowania od +20 °C do +30 °C akumulatory trzeba
ładować co 6 miesięcy.
W temperaturze magazynowania od +30 °C do +40 °C akumulatory trzeba
ładować co 3 miesiące.
Wytrzymałość na
wstrząsy
Rodzaj obciążenia
Wartość skuteczna
przyspieszenia (drgania
ustalone)
Zakres częstotliwości
(drgania ustalone)
Przyspieszenie (wstrząsy w
kierunku X/Y/Z)
Kształt krzywej czasu
trwania (wstrząsy w
kierunku X/Y/Z)
Podczas
transportu
Podczas pracy
ciągłej
0,37 g
0,1 g
4...120 Hz
10 g
2,5 g
półsinus/11 ms
Jeżeli mogą wystąpić wyższe obciążenia mechaniczne, układ sterowania
należy ustawić na elementach tłumiących drgania.
Sterownik
24 / 101
Napięcie zasilania
DC 25,8 … 27,3 V
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
2. Dane techniczne
Komputer
sterujący
KUKA Control
Panel
Główny procesor
patrz Stan dostawy
Moduły pamięci DIMM
min. 512 MB
Twardy dysk, stacja dyskietek,
napęd CD-ROM
patrz Stan dostawy
Napięcie zasilania
DC 25,8 … 27,3 V
Wymiar (szer. x wys. x głęb.)
około 33x26x8 cm3
Rozdzielczość wyświetlacza VGA
640x480 punktów
Wielkość wyświetlacza VGA
8"
Panel KCP część górna IP54
Rodzaj zabezpieczenia
Panel KCP część dolna IP23
1,4 kg
Ciężar
Długości
przewodów
Nazwy przewodów, długości przewodów (standard) oraz długości specjalne
są podane w poniższej tabeli.
Przewód
Długość
standardowa w mm
Przewód silnika
Przewód transmisji
danych
Sieciowy przewód
doprowadzający z XS1
(opcjonalny)
Przewód
7
7
15 / 25 / 35 / 50
15 / 25 / 35 / 50
3
-
Długość
standardowa w mm
Przewód VKCP
Długość specjalna
w mm
10
Przedłużenie w m
10 / 20 / 30 / 40
Jeśli zajdzie taka konieczności, zastosować wyłącznie jeden przedłużacz
VKCP i nie przekraczać łącznej długości kabla, wynoszącej 60 m.
2.2
Wymiary układu sterowania robota
Na ilustracji przedstawiono wymiary układu sterowania robota.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
25 / 101
VKR C2 edition2005
Rys. 2-1: Wymiary (podane w mm)
1
2
2.3
Chłodnica (fakultatywnie)
Widok przedni
3
4
Widok z boku
Widok z góry
Minimalne odstępy układu sterowania robota
Na ilustracji przedstawiono wymagane odstępy minimalne układu sterowania
robota.
Rys. 2-2: Minimalne odległości (podane w mm)
1
Chłodnica (fakultatywnie)
Ostrzeżenie!
W przypadku braku przestrzegania minimalnych odstępów, może dojść do
uszkodzenia układu sterowania robota. Należy bezwzględnie przestrzegać
podanych odstępów minimalnych.
26 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
2. Dane techniczne
Określone prace konserwacyjne i naprawcze w układzie sterowania robota
przeprowadza się od boku lub od tyłu. Musi być do tego dostępny układ
sterowania robota. W przypadku braku dostępu z boku lub z tyłu, musi istnieć
możliwość przemieszczenia układu sterowania robota w takie położenie, w
którym będzie możliwe przeprowadzenie prac.
2.4
Minimalne odległości od szafy nadstawianej i technologicznej
Rys. 2-3: Minimalne odległości od szafy nadstawianej i technologicznej
1
2
2.5
Szafa nadstawiana
Szafa technologiczna
Wymiary otworów mocowania do podłogi
Na ilustracji pokazano wymiary otworów mocowania do podłogi.
Rys. 2-4: Otwory mocowania do podłogi
1
Widok od dołu
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
27 / 101
VKR C2 edition2005
2.6
Zasięg skrzydeł drzwi szafy
Rys. 2-5: Zasięg skrzydeł drzwi szafy
Zasięg skrzydeł pojedynczo:
drzwi z ramą komputera ok. 180 °
w rzędzie obok siebie:
28 / 101
drzwi ok. 155
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
3. Bezpieczeństwo
3
Bezpieczeństwo
3.1
Informacje ogólne
3.1.1
Informacja o zakresie odpowiedzialności cywilnej
Przedstawione w niniejszym dokumencie urządzenie jest robotem
przemysłowym lub jednym z elementów robota przemysłowego.
Elementy robota przemysłowego:
Manipulator
Układ sterowania robota
Programator
Przewody łączące
Osie dodatkowe (opcja)
np. jednostka liniowa, stół obrotowo-przechylny, nastawnik
Oprogramowanie
Opcje, akcesoria
Robot przemysłowy został skonstruowany zgodnie z aktualnym stanem
wiedzy technicznej oraz obowiązującymi zasadami bezpieczeństwa. Mimo to
w przypadku jego niedopuszczalnego użytkowania mogą wystąpić zagrożenia
dla zdrowia i życia personelu obsługującego albo uszkodzenia robota
przemysłowego i innych wartości materialnych.
Robot przemysłowy może by użytkowany tylko w technicznie sprawnym
stanie oraz zgodnie z jego przeznaczeniem i z uwzględnieniem zasad
bezpieczeństwa oraz grożących niebezpieczeństw. Użytkowanie robota musi
się odbywać z uwzględnieniem instrukcji obsługi oraz dołączonej do
dostarczonego robota Deklaracji montażu. Usterki, które mogą mieć
negatywny wpływ na bezpieczeństwo pracy, muszą być natychmiast
usuwane.
Informacja dot.
bezpieczeństwa
Dane dot. bezpieczeństwa nie mogą być wykorzystywane przeciwko firmie
KUKA Roboter GmbH. Nawet ścisłe przestrzeganie wskazówek
bezpieczeństwa nie daje gwarancji, że robot przemysłowy nie spowoduje
powstania obrażeń lub szkód materialnych.
Bez zezwolenia firmy KUKA Roboter GmbH nie wolno dokonywać żadnych
modyfikacji robota przemysłowego. Do robota przemysłowego nie wolno
podłączać żadnych dodatkowych komponentów (narzędzi, oprogramowania
etc.), nie należących do zakresu dostawy firmy KUKA Roboter GmbH. Za
uszkodzenia robota przemysłowego lub pozostałe szkody materialne,
powstałe wskutek instalacji tych komponentów, odpowiedzialność ponosi
wyłącznie użytkownik.
W uzupełnieniu do rozdziału dotyczącego bezpieczeństwa, w instrukcjach
obsługi podano dalsze wskazówki bezpieczeństwa. Należy się do nich
stosować.
3.1.2
Zgodne z przeznaczeniem użytkowanie robota przemysłowego
Robot przemysłowy służy wyłącznie do wykonywania czynności podanych w
instrukcji użytkowania lub w instrukcji montażu, zobacz rozdział
"Zastosowanie zgodne z przeznaczeniem".
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
29 / 101
VKR C2 edition2005
Szczegółowe informacje podano w rozdziale "Zastosowanie zgodne z
przeznaczeniem" instrukcji użytkowania lub instrukcji montażu elementów.
Inne lub wykraczające poza podany zakres stosowanie jest uważane za
niezgodnie z przeznaczeniem i niedozwolone. Producent nie odpowiada za
wynikające z tego tytułu szkody. Ryzyko ponosi wyłącznie użytkownik
urządzenia.
Zgodne z przeznaczeniem stosowanie urządzenia obejmuje też
przestrzeganie instrukcji użytkowania i instrukcji montażu poszczególnych
elementów, w szczególności zaś przestrzeganie przepisów dotyczących
konserwacji.
Zastosowanie
niezgodnie z
przeznaczeniem
3.1.3
Za niedozwolone uznaje się każde użytkowanie, które wykracza poza zakres
określony jako użytkowanie zgodnie z przeznaczeniem. Należy do tego np.:
transport osób i zwierząt;
wykorzystanie jako pomoc przy wchodzeniu;
zastosowanie poza dopuszczalnymi granicami eksploatacji;
zastosowanie w obszarze zagrożenia wybuchowego;
użytkowanie bez dodatkowych urządzeń ochronnych;
użytkowanie na wolnym powietrzu.
Deklaracja zgodności z normami WE i deklaracja montażu
Niniejszy robot przemysłowy stanowi część maszyny w myśl dyrektywy
maszynowej WE. Robota przemysłowego można uruchamiać wyłącznie w
przypadku spełnienia następujących warunków:
Robot przemysłowy został wbudowany w instalację.
Lub: Robot przemysłowy tworzy wraz z innymi maszynami jedną
instalację.
Lub: Robota przemysłowego uzupełniono o wszystkie funkcje
zabezpieczające i urządzenia ochronne, niezbędne do działania
kompletnej maszyny w myśl dyrektywy maszynowej WE.
Deklaracja
zgodności
Instalacja odpowiada dyrektywie maszynowej WE. Zostało to ustalone w
toku oceny zgodności.
Integrator systemów musi zgodnie z dyrektywą maszynową wystawić dla całej
instalacji Deklarację zgodności z normami WE. Deklaracja zgodności stanowi
podstawę oznaczenia instalacji znakiem jakości CE. Robot przemysłowy
może być eksploatowany wyłącznie zgodnie z ustawami, przepisami i
normami, obowiązującymi w kraju przeznaczenia.
Układ sterowania robota posiada oznaczenie CE zgodnie z dyrektywą EMC i
dyrektywą niskonapięciową.
Deklaracja
montażu
Robot przemysłowy jako niekompletna maszyna jest dostarczany z deklaracją
montażu zgodnie z załącznikiem II B dyrektywy maszynowej 2006/42/WE.
Częścią tej deklaracji montażu jest wykaz podstawowych wymogów zgodnie
z załącznikiem I oraz instrukcja montażu.
Składając deklarację montażu oświadcza się, że uruchomienie niekompletnej
maszyny będzie niedozwolone dotąd, aż niekompletna maszyna zostanie
zamontowana w maszynie, lub też złożona z pozostałymi częściami w jedną
maszynę, która będzie zgodna z przepisami dyrektywy maszynowej WE i
będzie posiadała deklarację zgodności WE zgodnie z załącznikiem II A.
30 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
3. Bezpieczeństwo
Deklaracja montażu wraz z załącznikami będzie przechowywane przez
integratora systemu jako część dokumentacji technicznej kompletnej
maszyny.
3.1.4
Używane pojęcia
Pojęcie
Opis
Zakres osi
Podany w stopniach lub milimetrach zakres osi, w jakim może się ona
poruszać. Zakres osi trzeba zdefiniować osobno do każdej osi.
Droga zatrzymania = droga reakcji + droga hamowania
Droga zatrzymania
Droga zatrzymania stanowi część obszaru zagrożenia.
Manipulator może się poruszać w obszarze roboczym. Obszar roboczy
wyznaczają poszczególne zakresy osi.
Użytkownikiem robota przemysłowego może być przedsiębiorca,
pracodawca lub osoba oddelegowana, odpowiedzialna za użytkowanie
robota przemysłowego.
Obszar zagrożenia obejmuje obszar roboczy i drogi hamowania.
Programator KCP (KUKA Control Panel) jest wyposażony we wszystkie
funkcje obsługi i wskaźniki, konieczne do obsługi i programowania
robota przemysłowego.
Obszar roboczy
Użytkownik
(użytkownik)
Obszar zagrożenia
KCP
Z układem sterowania robota VKR C2 edition2005 współpracuje wersja
VKCP. W niniejszym rozdziale dotyczącym bezpieczeństwa
zastosowano ogólną nazwę "KCP".
Układ mechaniczny robota i należąca do niego instalacja elektryczna
Obszar ochronny znajduje się poza obszarem zagrożenia.
Napędy natychmiast stają a hamulce włączają się. Manipulator i osie
dodatkowe (opcja) zatrzymują się w pobliżu toru.
Manipulator
Obszar ochronny
Kategoria
zatrzymania 0
Wskazówka: Tę kategorię zatrzymania nazwano w dokumencie jako
STOP 0.
Manipulator i osie dodatkowe (opcja) zatrzymują się zgodne z
przebiegiem toru. Po upływie 1 sekundy następuje wyłączenie napędów
i zadziałanie hamulców.
Kategoria
zatrzymania 1
Wskazówka: Tę kategorię zatrzymania nazwano w dokumencie jako
STOP 1.
Napędy natychmiast stają ale hamulce nie włączają się. Manipulator i
osie dodatkowe (opcja) hamują przy zwykłej krzywej hamowania.
Kategoria
zatrzymania 2
Wskazówka: Tę kategorię zatrzymania nazwano w dokumencie jako
STOP 2.
Integratorami systemów są osoby, zajmujące się podłączaniem robota
przemysłowego do instalacji zgodnie z wymogami bezpieczeństwa oraz
uruchomieniem systemu.
Tryb testowy Ręcznie Ograniczona Prędkość (<= 250 mm/s)
Tryb testowy Ręcznie Wyższa Prędkość (dopuszczalnie > 250 mm/s)
Oś ruchoma, która nie należy do manipulatora, ale jest uruchamiana za
pomocą układu sterowania robota. np. jednostka liniowa KUKA, stół
obrotowo-przechylny, Posiflex
Integrator systemów
(integrator instalacji)
T1
T2
Osie dodatkowe
3.2
Personel
W związku z użytkowaniem robota przemysłowego wyznaczono następujące
osoby i grupy osób:
Użytkownik
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
31 / 101
VKR C2 edition2005
Personel
Wszystkie osoby związane z pracami przy robocie przemysłowym muszą
przeczytać i zrozumieć dokumentację robota przemysłowego, a zwłaszcza
rozdział dot. bezpieczeństwa.
Użytkownik
Personel
Użytkownik musi przestrzegać zakładowych przepisów bhp. Należy do tego
np.:
Użytkownik musi przestrzegać obowiązku prowadzenia nadzoru.
Użytkownik musi w określonych odstępach czasu przeprowadzać
szkolenia pracowników.
Przed rozpoczęciem pracy personel musi zostać poinstruowany o rodzaju i
zakresie prac oraz o możliwych zagrożeniach. Należy regularnie
przeprowadzać szkolenia. Szkolenia należy poza tym przeprowadzać po
zaistnieniu szczególnych sytuacji oraz dokonaniu zmian technicznych.
Kto zalicza się do personelu:
integrator systemu
użytkownicy, dzielący się na:
personel odpowiedzialny za uruchomienie, konserwację i serwis,
operator
personel odpowiedzialny za czyszczenie
Ustawianie, wymiana, konfiguracja, obsługa, konserwacja i naprawy
systemu mogą być wykonywane wyłącznie według przepisów podanych w
instrukcji obsługi określonego składnika robota przemysłowego i tylko przez
posiadający specjalne kwalifikacje personel.
Integrator
systemów
Integrator systemów podłącza robota przemysłowego do instalacji zgodnie z
wymogami bezpieczeństwa.
Integrator systemów jest odpowiedzialny za następujące zadania:
Użytkownik
Przykład
32 / 101
Posadowienie robota przemysłowego
Przyłączanie robota przemysłowego
Przeprowadzanie oceny ryzyka
Zastosowanie niezbędnych funkcji zabezpieczających i urządzeń
ochronnych
Wystawienie Deklaracji zgodności
Umieszczenie znaku jakości CE
Tworzenie instrukcji użytkowania instalacji
Użytkownik musi spełniać następujące warunki:
Użytkownik musi zostać przeszkolony w zakresie wykonywanych prac.
Czynności przy robocie przemysłowym może wykonywać wyłącznie
wykwalifikowany personel. Są to osoby, które ze względu na posiadane
specjalistyczne wykształcenie, umiejętności i doświadczenie, jak również
na podstawie znajomości stosownych norm, potrafią właściwie ocenić
prace przeznaczone do wykonania, oraz rozpoznać ewentualne
zagrożenia.
Można dokonać podziału zadań personelu, jak w poniższej tabeli.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
3. Bezpieczeństwo
Zadania
Operator
Programista
Integrator
systemów
Włączanie / wyłączanie
układu sterowania
robota
x
x
x
Uruchamianie
programu
x
x
x
Wybór programu
x
x
x
Wybór trybu
roboczego
x
x
x
Pomiar
(Tool, Base)
x
x
Kalibracja
manipulatora
x
x
Konfiguracja
x
x
Programowanie
x
x
Pierwsze uruchomienie
x
Konserwacja
x
Naprawa
x
Wyłączanie z
eksploatacji
x
Transport
x
Prace przy układzie elektrycznym i mechanicznym robota przemysłowego
mogą być wykonywane wyłącznie przez wykwalifikowany personel.
3.3
Obszar roboczy, strefa bezpieczeństwa i strefa zagrożenia
Obszary robocze muszą być ograniczone do wymaganego minimum. Obszar
roboczy należy zabezpieczyć za pomocą urządzeń zabezpieczających.
Urządzenia ochronne (np. drzwi ochronne) muszą się znajdować w strefie
bezpieczeństwa. Po zatrzymaniu pracy manipulator i osie dodatkowe (opcja)
hamują i stają w obszarze zagrożenia.
Obszar zagrożenia obejmuje obszar roboczy i drogi zatrzymania manipulatora
i osi dodatkowych (opcja). Należy je odgrodzić za pomocą zabezpieczeń, aby
wykluczyć zagrożenia osób i przedmiotów.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
33 / 101
VKR C2 edition2005
Rys. 3-1: Przykład zakresu osi A1
1
2
3.4
Obszar roboczy
Manipulator
3
4
Droga zatrzymania
Obszar ochronny
Zdarzenie wyzwalające zatrzymanie
Reakcje powodujące zatrzymanie robota przemysłowego są efektem
działania operatora lub reakcją na system monitorowania i komunikaty o
błędzie. Poniższa tabela przedstawia reakcje powodujące zatrzymanie
systemu w zależności od ustawionego trybu roboczego.
STOP 0, STOP 1 i STOP 2 są definicjami zatrzymana zgodnie z normą DIN
EN 60204-1:2006.
Zdarzenie wyzwalające
Otworzyć drzwi ochronne
Naciśnięcie przycisku ZATRZYMANIA
AWARYJNEGO
Puszczenie przycisku zatwierdzającego
Zwolnienie przycisku Start
Naciśnięcie przycisku "Napędy
WYŁĄCZ”
Naciśnięcie przycisku STOP
Wybór trybu pracy
Błąd nadajnika
(połączenie DSE-RDC otwarte)
Brak zezwolenia na przesuw
Wyłączenie układu sterowania robota
T1, T2
STOP 0
AUT EXT
STOP 1
STOP 1
STOP 0
STOP 2
STOP 0
STOP 2
STOP 0
STOP 0
STOP 2
STOP 0
Przerwa w zasilaniu
34 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
3. Bezpieczeństwo
3.5
Funkcje bezpieczeństwa
3.5.1
Przegląd funkcji bezpieczeństwa
Funkcje bezpieczeństwa:
Wybór trybów pracy
Ochrona operatora (= podłączenie do ryglowania odłączających urządzeń
ochronnych)
Miejscowe urządzenie ZATRZYMANIA AWARYJNEGO (= przycisk
ZATRZYMANIA AWARYJNEGO w panelu obsługowym KCP)
Zewnętrzne ZATRZYMANIE AWARYJNYEGO
Przycisk akceptacji
Zewnętrzny przycisk akceptacji
Miejscowe zatrzymanie bezpieczeństwa przez wejście kwalifikujące
RoboTeam: blokowanie nie wybranych robotów
Te obwody sterownicze odpowiadają wymogom poziomu zapewnienia
bezpieczeństwa d i kategorii 3 zgodnie z normą EN ISO 13849-1. Dotyczy to
jednakże tylko następujących warunków:
ZATRZYMANIE AWARYJNE średnio jest uruchamiane nie częściej niż 1raz dziennie.
Tryb pracy średnio jest zmieniany nie częściej niż 10-razy dziennie.
Liczba cykli łączeniowych głównego wyłącznika nadmiarowego: maks.
100 na dzień
Ostrzeżenie!
W przypadku braku spełnienia tych wymogów, należy skontaktować się z
firmą KUKA Roboter GmbH.
Niebezpieczeństwo!
Bez sprawnie działających funkcji zabezpieczających i urządzeń ochronnych
robot przemysłowy może spowodować szkody osobowe i materialne. Przy
wyłączonych funkcjach zabezpieczających lub zdemontowanych urządzenia
ochronnych nie wolno korzystać z robota przemysłowego.
3.5.2
Układ bezpieczeństwa ESC
Działanie i uruchamianie elektronicznych funkcji zabezpieczających
nadzorowane jest przez logiczny układ bezpieczeństwa.
Układ bezpieczeństwa ESC (Electronic Safety Circuit) jest 2-kanałowym,
wspomaganym komputerowo systemem zabezpieczeń. Monitoruje on
nieprzerwanie wszystkie podłączone, istotne dla bezpieczeństwa
komponenty. W przypadku usterek lub przerwania obwodu bezpieczeństwa,
układ zasilania napięciem wyłącza napędy i tym samym powoduje
zatrzymanie robota przemysłowego.
W zależności od trybu roboczego, w którym pracuje robot przemysłowy,
logiczny układ bezpieczeństwa ESC wyzwala różne reakcje zatrzymania.
Logiczny układ bezpieczeństwa ESC nadzoruje następujące wejścia:
Ochrona użytkownika
Miejscowe ZATRZYMANIE AWARYJNE (= przycisk ZATRZYMANIA
AWARYJNEGO w panelu obsługowym KCP)
Zewnętrzne ZATRZYMANIE AWARYJNYEGO
Przycisk akceptacji
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
35 / 101
VKR C2 edition2005
Zewnętrzny przycisk akceptacji
Napędy WYŁ.
Napędy WŁ.
Tryby pracy
Wejścia kwalifikujące
Logiczny układ bezpieczeństwa ESC nadzoruje następujące wyjścia:
3.5.3
Tryb pracy
Napędy WŁ
Miejscowe ZATRZYMANIE AWARYJNE
Przełącznik trybów roboczych
Robot przemysłowy może pracować w następujących trybach pracy:
Ręcznie Ograniczona Prędkość (T1)
Ręcznie Wyższa Prędkość (T2)
Automatyka Zewnętrzna (AUT EXT)
Tryb roboczy wybierany jest przy pomocy przełącznika trybów roboczych,
znajdującego się na KCP. Przełącznik uruchamiany jest kluczem, który można
wyjąć. Jeśli klucz zostanie wyjęty, przełącznik jest zablokowany a tryb roboczy
nie może zostać zmieniony.
Jeśli tryb pracy zmieniany jest podczas pracy urządzenia, napędy zostają
natychmiast wyłączone. Manipulator i osie dodatkowe (opcja) zatrzymują się
wraz z włączeniem STOP 0.
Rys. 3-2: Przełącznik trybów roboczych
1
2
AUT EXT (Automatyka zewnętrzna)
T1 / T2
Za pośrednictwem programatora KCP (KUKA Control Panel) można
przełączać tryby pracy T1 i T2. Do tego potrzebne będzie skorzystanie w
zewnętrznego wyłącznika kluczykowego, umieszczonego poza obszarem
roboczym robota.
36 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
3. Bezpieczeństwo
Tryb
pracy
Użytkowanie
Prędkości
T1
T2
AUT EXT
Weryfikacja programu:
Zaprogramowana prędkość,
maks. 250 mm/s
Do testowania,
programowania i
wczytywania
Do trybu testowego
Do robotów
przemysłowych z
nadrzędnym układem
sterowania, np. PLC
Możliwe wyłącznie
przy zamkniętym
obwodzie
bezpieczeństwa
Tryb ręczny:
Prędkość przesuwu ręcznego,
maks. 250 mm/s
Weryfikacja programu:
Zaprogramowana prędkość
Tryb programu:
Zaprogramowana prędkość
Tryb ręczny: Brak możliwości
By w trybach pracy T1 i T2 móc pracować przy robocie przemysłowym z
otwartymi drzwiami ochronnymi, można zastosować następujące obejścia:
Wkładka
elektromechaniczna
typu E2
Wkładka
elektromechaniczna
typu E2+E7
Tryb pracy
T1
T2
Tryb pracy T1 jest uruchomiony.
Obwód ochronny "Otwarte drzwi ochronne" jest
zmostkowany. Przy otwartych drzwiach
ochronnych manipulator może się poruszać z
prędkością T1.
Tryb pracy T2 jest uruchomiony.
Zabezpieczenie maszynowe jest zmostkowane.
Przy otwartych drzwiach ochronnych
manipulator może się poruszać z prędkością T2.
Wkładka
elektromec
haniczna
typu E2
nie
nie
tak
tak
nie
nie
tak
tak
Wkładka
elektromec
haniczna
typu E7
nie
nie
nie
nie
nie
nie
tak
tak
Stan drzwi
ochronnyc
h
Napędy
mogą być
włączane
otwarty
zamknięty
otwarty
zamknięty
otwarty
zamknięty
otwarty
zamknięty
nie
tak
tak
tak
nie
tak
tak
tak
Dalsze informacje znajdują się w instrukcji montażu lub użytkowania układu
sterowania robota.
3.5.4
Ochrona operatora
Wejście do ochrony operatora służy do blokady oddzielających urządzeń
zabezpieczających. Do 2-kanałowego wejścia można podłączać urządzenia
zabezpieczające, takie jak np. drzwi ochronne. Jeżeli do tego wejścia nie
podłączono żadnych urządzeń, nie ma możliwości eksploatacji robota w trybie
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
37 / 101
VKR C2 edition2005
automatycznym. W trybach pracy Ręcznie Ograniczona Prędkość (T1) i
Ręcznie Wyższa Prędkość (T2) ochronę operatora można obejść za pomocą
układu zamykającego E2 i E2+E7.
W przypadku utraty sygnału podczas pracy w trybie automatycznym (np. po
otwarciu drzwi ochronnych) następuje zatrzymanie manipulatora i osi
dodatkowych (opcjonalnych) przy pomocy funkcji STOP 1. Przy ponownym
pojawieniu się sygnału na wejściu można kontynuować pracę w trybie
automatycznym.
Ochronę operatora można podłączyć do układu sterowania robota za
pośrednictwem interfejsu peryferyjnego.
Ostrzeżenie!
Należy dopilnować, by sygnał ochrony operatora nie aktywował się
samoczynnie w wyniku zamknięcia urządzenia ochronnego (np. drzwi
ochronne), lecz wymagał dodatkowego ręcznego zatwierdzenia. Tylko w ten
sposób można zagwarantować, że nie dojdzie do przypadkowego
kontynuowania pracy zautomatyzowanej mimo przebywania osób w
obszarze zagrożenia, np. zatrzaśnięcie drzwi ochronnych.
Nieprzestrzeganie tego ostrzeżenia może spowodować śmiertelne lub
bardzo ciężkie obrażenia ciała lub poważne szkody materialne.
3.5.5
Urządzenie ZATRZYMANIA AWARYJNYEGO
Urządzenie ZATRZYMANIA AWARYJNEGO robota przemysłowego
występuje w postaci przycisku w panelu sterowniczym KCP. Przycisk należy
wcisnąć w razie wystąpienia niebezpiecznej sytuacji lub awarii.
Jak zareaguje robot przemysłowy po naciśnięciu przycisku ZATRZYMANIA
AWARYJNEGO:
Trybu pracy Ręcznie Ograniczona Prędkość (T1) i Ręcznie Wyższa
Prędkość (T2):
Napędy od razu stają. Manipulator i osie dodatkowe (opcja) zatrzymują się
wraz z włączeniem STOP 0.
Tryby pracy zautomatyzowanej (AUT i AUT EXT):
Napędy wyłączają się po upływie 1 sekundy. Manipulator i osie dodatkowe
(opcja) zatrzymują się wraz z włączeniem STOP 1.
Aby móc kontynuować pracę, należy odblokować przycisk ZATRZYMANIA
AWARYJNEGO obracając go i potwierdzić komunikat zatrzymania.
38 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
3. Bezpieczeństwo
Rys. 3-3: Przycisk ZATRZYMANIA AWARYJNEGO w panelu
sterowniczym KCP
1
Przycisk ZATRZYMANIA AWARYJNYEGO
Ostrzeżenie!
Narzędzia lub inne urządzenia, połączone z manipulatorem z których może
pochodzić potencjalne niebezpieczeństwo, muszą mieć połączenie z
instalacją poprzez obwód ZATRZYMANIA AWARYJNEGO.
Nieprzestrzeganie tego ostrzeżenia może spowodować śmiertelne lub
bardzo ciężkie obrażenia ciała lub poważne szkody materialne.
3.5.6
Zewnętrzne urządzenie ZATRZYMANIA AWARYJNEGO
Na każdym stanowisku obsługowym i w każdym miejscu, w którym może zajść
konieczność uruchomienia ZATRZYMANIA AWARYJNEGO, muszą być
udostępnione urządzenia ZATRZYMANIA AWARYJNEGO. Musi o to zadbać
integrator systemu. Zewnętrzne urządzenia ZATRZYMANIA AWARYJNEGO
przyłącza się za pośrednictwem interfejsu dostarczanego przez klienta.
Zewnętrzne urządzenia ZATRZYMANIA AWARYJNEGO nie wchodzą w
zakres dostawy robota przemysłowego.
3.5.7
Przycisk akceptacji
Przycisk akceptacji znajduje się programatorze robota przemysłowego.
W panelu sterowania KCP umieszczone są 3 przyciski akceptacji. Przyciski
akceptacji mają 3 pozycje:
Nie wciśnięty
Pozycja środkowa
Wciśnięty
W trybach testowych można poruszać manipulatorem wyłącznie wtedy, gdy
przycisk zatwierdzający znajduje się w pozycji środkowej. Po zwolnieniu lub
wciśnięciu przycisku akceptacji do oporu (pozycja "Awaria”) następuje
natychmiastowe wyłączenie wszystkich napędów i manipulator zatrzymuje się
za pomocą funkcji STOP 0.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
39 / 101
VKR C2 edition2005
Ostrzeżenie!
Przycisków akceptacji nie należy mocować taśmami klejącymi ani też w
żaden sposób przerabiać żadnymi innymi środkami pomocniczymi.
Skutkiem takiej zmiany mogą być śmiertelne bądź ciężkie obrażenia ciała lub
poważne szkody materialne.
Rys. 3-4: Przycisk zatwierdzający na KCP
1-3
3.5.8
Przycisk akceptacji
Zewnętrzny przycisk akceptacji
Zewnętrzne przyciski akceptacji są potrzebne, gdy w obszarze zagrożenia
robota przemysłowego przebywa więcej osób. Można je podłączyć do układu
sterowania robota za pośrednictwem interfejsu peryferyjnego.
Zewnętrznych przycisków akceptacji nie ma w zestawie z robotem
przemysłowym.
3.6
Dodatkowe wyposażenie ochronne
3.6.1
Tryb impulsowy
Układem sterowania robota w trybach pracy Ręcznie Ograniczona Prędkość
(T1) i Ręcznie Wyższa Prędkość (T2) można przetwarzać program wyłącznie
w trybie impulsowym. Co to oznacza: By móc przetworzyć program, musi być
naciśnięty przycisk zatwierdzania i przycisk Start.
Po zwolnieniu lub wciśnięciu przycisku zatwierdzającego do oporu (pozycja
"Awaria”) następuje natychmiastowe wyłączenie wszystkich napędów i
manipulator wraz z osiami dodatkowymi (opcja) zatrzymuje się za pomocą
funkcji STOP 0.
40 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
3. Bezpieczeństwo
Gdy zostanie zwolniony tylko przycisk Start, spowoduje to zatrzymanie robota
przemysłowego przyciskiem STOP 2.
3.6.2
Wirtualne łączniki krańcowe
Zakresy wszystkich osi manipulatora i nastawnika są ograniczone
regulowanymi wirtualnymi łącznikami krańcowymi. Wirtualne łączniki
krańcowe służą wyłącznie do ochrony maszyny i należy je ustawić w taki
sposób, aby manipulator/nastawnik nie mógł się przesuwać w kierunku
mechanicznych łączników krańcowych.
Wirtualne łączniki krańcowe są ustawiane podczas uruchamiania robota
przemysłowego.
Dalsze informacje znajdują się w instrukcji obsługi i programowania.
3.6.3
Mechaniczne ograniczniki krańcowe
Zakresy osi podstawowych A1 do A3 i osi chwytaka A5 manipulatora są
ograniczone mechanicznymi ogranicznikami krańcowymi ze zderzakami.
W osiach dodatkowych można zamontować pozostałe mechaniczne
ograniczniki krańcowe.
Ostrzeżenie!
Jeśli manipulator lub oś dodatkowa poruszając się uderzy w przeszkodę lub
zderzak w mechanicznym ograniczniku końcowym lub w mechanicznym
ograniczniku zakresu osi, robot przemysłowy może ulec uszkodzeniu. Przed
ponownym uruchomieniem robota przemysłowego należy się koniecznie
skonsultować z firmą KUKA Roboter GmbH (>>> 7 "Serwis KUKA"
strona 89). Przed przystąpieniem do dalszego użytkowania robota
przemysłowego, odpowiedni zderzak należy natychmiast wymienić na nowy.
Jeżeli manipulator (oś dodatkowa) poruszając się przy prędkości większej
niż 250 mm/s uderzy w zderzak, taki manipulator (lub oś dodatkową) trzeba
będzie wymienić, bądź też pracownicy KUKA Roboter GmbH muszą
przeprowadzić ponowne uruchomienie robota.
3.6.4
Mechaniczny ogranicznik zakresu osi (opcja)
Niektóre manipulatory mogą być wyposażone w osiach A1–A3 w
mechaniczne ograniczniki zakresu. Regulowane ograniczniki zakresu
ograniczają zakres osi do niezbędnego minimum. Zwiększa to ochronę osób
i urządzeń.
W manipulatorach nieprzystosowanych do montażu mechanicznych
ograniczników zakresów osi, obszar roboczy został zaprojektowany w taki
sposób, że również bez mechanicznych ograniczeń obszarów roboczych nie
ma możliwości wystąpienia zagrożenia osób lub szkód materialnych.
Gdy i to nie jest możliwe, obszar roboczy należy odgrodzić zaporami
świetlnymi, kurtynami świetlnymi lub przeszkodami W obszarze podawania i
przekazywania nie może dochodzić do powstawania miejsc przecięcia ani
zmiażdżenia.
Ta opcja nie jest dostępna we wszystkich modelach robotów.
Szczegółowych informacji o określonych modelach robotów udzielają
pracownicy firmy KUKA Roboter GmbH.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
41 / 101
VKR C2 edition2005
3.6.5
Układ monitorowania zakresu osi (opcja)
Osie podstawowe A1–A3 niektórych manipulatorów mogą być wyposażone w
2-kanałowe układy monitorowania zakresu osi. Osie pozycjonujące mogą być
wyposażone w dodatkowe układy monitorowania zakresu osi. Za pomocą
tego układu można regulować i monitorować strefę bezpieczeństwa jednej
osi. Zwiększa to ochronę osób i urządzeń.
Ta opcja nie jest dostępna we wszystkich modelach robotów.
Szczegółowych informacji o określonych modelach robotów udzielają
pracownicy firmy KUKA Roboter GmbH.
3.6.6
Mechanizm swobodnego obrotu (opcja)
Opis
Za pomocą mechanizmu swobodnego obrotu można ręcznie poruszać
manipulatorem, unieruchomionym wskutek wypadku lub awarii. Mechanizm
swobodnego obrotu może być stosowany do potrzeb silników napędowych osi
podstawowych i w zależności od wariantu robota do potrzeb silników
napędowych osi chwytaków. Mechanizm ten może być stosowany tylko w
sytuacjach wyjątkowych i awaryjnych (np. w celu uwolnienia osób).
Ostrzeżenie!
Podczas pracy silniki nagrzewają się do temperatur, które mogą powodować
oparzenia skóry. Nie dotykać. Należy zastosować odpowiednie środki
zabezpieczające, np. rękawice ochronne.
Sposób
postępowania
1. Wyłączyć układ sterowania robota i zabezpieczyć przed niepowołanym
ponownym włączeniem (np. za pomocą kłódki).
2. Zdjąć osłonę silnika.
3. Nałożyć mechanizm na odpowiedni silnik i przesunąć oś w żądanym
kierunku.
Kierunki oznaczone są na silnikach za pomocą strzałek. Należy przy tym
pokonać opór mechanicznego hamulca silnika i ewentualnie dodatkowe
obciążenia osi.
Ostrzeżenie!
Przy poruszaniu osią za pomocą mechanizmu swobodnego obrotu można
uszkodzić hamulec silnikowy. Niebezpieczeństwo powstania szkód
osobowych i materialnych. Po użyciu mechanizmu swobodnego obrotu
należy wymienić odpowiedni silnik.
3.6.7
Łącznik KCP (opcja)
Za pomocą łącznika KCP można odłączać i podłączać panel sterowniczy KCP
przy pracującym układzie sterowania robota.
Ostrzeżenie!
Użytkownik powinien zadbać o to, by odłączone programatory KCP od razu
zabierać z instalacji i trzymać z dala zasięgu pola widzenia i działania
personelu pracującego przy robocie przemysłowym. Ma na to na celu
uniknięcie pomyłkowego użycia działających i niedziałających urządzeń
ZATRZYMANIA AWARYJNEGO.
Nieprzestrzeganie tego ostrzeżenia może spowodować śmiertelne lub
bardzo ciężkie obrażenia ciała lub poważne szkody materialne.
Dalsze informacje znajdują się w instrukcji użytkowania lub w instrukcji
montażu układu sterowania robota.
42 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
3. Bezpieczeństwo
3.6.8
Oznaczenia na robocie przemysłowym
Wszystkie tabliczki, wskazówki, symbole i oznaczenia są elementami robota
przemysłowego, istotnymi ze względów bezpieczeństwa. Nie można ich
zmieniać ani usuwać.
Oznaczenia na robocie przemysłowym:
Tabliczki parametrów
Wskazówki ostrzegawcze
Symbole bezpieczeństwa
Tabliczki informacyjne
Oznaczenia przewodów
Tabliczki znamionowe
Dalsze informacje znajdują się w danych technicznych instrukcji użytkowania
lub w instrukcjach montażu elementów robota przemysłowego.
3.6.9
Zewnętrzne urządzenia ochronne
Urządzenia
ochronne
Dostęp osób do obszaru zagrożenia manipulatora należy chronić
urządzeniami ochronnymi.
Oddzielające urządzenia ochronne muszą spełniać następujące wymagania:
Odpowiadają one wymaganiom normy EN 953.
Uniemożliwiają one osobom przechodzenie do obszaru zagrożenia i nie
da się ich w łatwy sposób obejść.
Są dostatecznie mocno przymocowane i nie da ich się sforsować siłami
roboczymi i pochodzącymi z otoczenia.
Nie stanowią zagrożenia ani nie mogą przyczyniać się do powstawania
zagrożenia.
Przewidziany odstęp minimalny od obszaru zagrożenia jest zachowany.
Drzwi ochronne (konserwacyjne) muszą spełniać następujące wymagania:
Ilość została ograniczone do niezbędnego minimum.
Ryglowanie (np. łączniki drzwi ochronnych) zostało połączone za
pośrednictwem urządzeń sterujących drzwiami ochronnymi lub
sterownika PLC bezpieczeństwa z wejściem ochrony operatora w
układzie sterowania robota.
Urządzenia sterujące, łączniki i rodzaj układu połączeń odpowiadają
wymogom poziomu sprawności i kategorii 3 zgodnie z normą EN 13849-1.
W zależności od położenia zagrożenia: Drzwi ochronne mogą być
wyposażone w dodatkową zasuwę, która pozwala na otwarcie drzwi
dopiero po zatrzymaniu manipulatora.
Przycisk do zatwierdzania drzwi ochronnych znajduje się poza obszarem
przez urządzenia ochronne.
Dalsze informacje znajdują się w odpowiednich normach i przepisach.
Zalicza się do tego również norma EN 953.
Inne urządzenia
zabezpieczające
Inne urządzenia zabezpieczające należy włączyć do instalacji zgodnie z
odpowiednimi normami i przepisami.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
43 / 101
VKR C2 edition2005
3.7
Przegląd trybów pracy i funkcji ochronnych
Poniższa tabela wskazuje, w jakim trybie roboczym działają określone funkcje
ochronne.
Działania ochronne
T1
T2
AUT EXT
Ochrona użytkownika
-*
-*
aktywny
Urządzenie ZATRZYMANIA
AWARYJNYEGO
aktywne
aktywne
aktywne
Przycisk zatwierdzający
aktywne
aktywne
-
Ograniczona prędkość
podczas weryfikacji
programu
aktywne
-
-
Tryb impulsowy
aktywne
aktywne
-
Wirtualne łączniki krańcowe
aktywne
aktywne
aktywne
* W trybach pracy T1 i T2 ochronę operatora można obejść za pomocą wkładki
elektromechanicznej typu E2 i E2+E7.
3.8
Środki bezpieczeństwa
3.8.1
Ogólne środki bezpieczeństwa
Robot przemysłowy może być użytkowany wyłącznie w stanie sprawności
technicznej, zgodnie z przeznaczeniem oraz z uwzględnieniem zasad
bezpieczeństwa. Nieprawidłowa obsługa może prowadzić do powstania szkód
osobowych i materialnych.
Nawet przy wyłączonym i zabezpieczonym sterowniku robota należy się liczyć
z możliwością ruchów robota przemysłowego. Wskutek niewłaściwego
montażu (np. przeciążenie) lub defektów mechanicznych (np. błędne
hamowanie) manipulator lub osie dodatkowe mogą nierównomiernie osiadać
na podłożu. W przypadku wykonywania prac przy wyłączonym robocie
przemysłowym, manipulator i osie dodatkowe należy przedtem przesunąć w
takie położenie, aby nie mógł się samodzielnie przesuwać, zarówno z jak i bez
obciążenia. Jeżeli jest to niemożliwe, należy odpowiednio zabezpieczyć
manipulator i osie dodatkowe.
Niebezpieczeństwo!
Bez sprawnie działających funkcji zabezpieczających i urządzeń ochronnych
robot przemysłowy może spowodować szkody osobowe i materialne. Przy
wyłączonych funkcjach zabezpieczających lub zdemontowanych urządzenia
ochronnych nie wolno korzystać z robota przemysłowego.
Ostrzeżenie!
Przebywanie pod układem mechanicznym robota grozi śmiercią lub
odniesieniem ciężkich obrażeń ciała. Z tego powodu przebywanie pod
układem mechanicznym robota jest zabronione!
Ostrzeżenie!
Podczas pracy silniki nagrzewają się do temperatur, które mogą powodować
oparzenia skóry. Nie dotykać. Należy zastosować odpowiednie środki
zabezpieczające, np. rękawice ochronne.
44 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
3. Bezpieczeństwo
KCP
Użytkownik musi zagwarantować obsługę robota przemysłowego z
programatorem KCP wyłącznie przez wykwalifikowany personel.
Jeżeli do instalacji podłączonych jest więcej programatorów KCP, należy
pamiętać o tym, że każdy programator KCP musi być przyporządkowany
określonemu jednemu robotowi przemysłowemu. Nie może zdarzyć się
pomyłka.
Ostrzeżenie!
Użytkownik powinien zadbać o to, by odłączone programatory KCP od razu
zabierać z instalacji i trzymać z dala zasięgu pola widzenia i działania
personelu pracującego przy robocie przemysłowym. Ma na to na celu
uniknięcie pomyłkowego użycia działających i niedziałających urządzeń
ZATRZYMANIA AWARYJNEGO.
Nieprzestrzeganie tego ostrzeżenia może spowodować śmiertelne lub
bardzo ciężkie obrażenia ciała lub poważne szkody materialne.
Klawiatura
zewnętrzna, mysz
zewnętrzna
Klawiatury zewnętrznej i/lub myszy zewnętrznej można używać tylko pod
następującymi warunkami:
Podczas przeprowadzania uruchamiania lub konserwacji.
Przy wyłączonych napędach.
W obszarze zagrożenia nikt nie przebywa.
Panelu KCP nie można używać, gdy do instalacji przyłączona jest klawiatura
i/lub mysz zewnętrzna.
Zaraz po zakończeniu uruchamiania lub konserwacji lub po przyłączeniu
programatora KCP należy odłączyć klawiaturę i/lub mysz zewnętrzną.
Usterki
Zmiany
Przebieg postępowania w przypadku pojawienia się usterek w robocie
przemysłowym:
Wyłączyć układ sterowania robota i zabezpieczyć przed niepowołanym
ponownym włączeniem (np. za pomocą kłódki).
Poinformować o usterce za pomocą tabliczki z odpowiednią wskazówką.
Prowadzić zapisy dot. usterek.
Usunąć usterkę i przeprowadzić kontrolę poprawności działania.
Po wykonaniu zmian w robocie przemysłowym należy sprawdzić, czy zmiany
nie spowodowały obniżenia poziomu bezpieczeństwa. Podczas tej kontroli
należy przestrzegać obowiązujących państwowych i regionalnych przepisów
bhp. Dodatkowo należy przetestować działanie wszystkich obwodów
bezpieczeństwa.
Nowe lub zmodyfikowane programy należy zawsze najpierw przetestować w
trybie roboczym Ręcznie Ograniczona Prędkość (T1).
Po dokonaniu zmian w robocie przemysłowym należy zawsze najpierw
przetestować wszystkie programy w trybie roboczym Ręcznie Ograniczona
Prędkość (T1). Dotyczy to wszystkich elementów robota przemysłowego,
obejmując również zmiany w oprogramowaniu i ustawieniach
konfiguracyjnych.
3.8.2
Sprawdzanie elementów sterowania decydujących o bezpieczeństwie
Wszystkie elementy sterowania decydujące o bezpieczeństwie zostały
obliczone na 20 lat użytkowania (z wyjątkiem zacisków wejść/wyjść
bezpiecznych układów magistralowych). Mimo to należy regularnie
sprawdzać, czy elementy bezpieczeństwa są sprawne.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
45 / 101
VKR C2 edition2005
Kontrola:
Przycisk ZATRZYMANIA AWARYJNEGO, przełącznik trybu pracy:
Przycisk ZATRZYMANIA AWARYJNEGO i przełącznik trybu pracy należy
uruchamiać co najmniej raz na 6 miesięcy, upewniając się przy tym, czy
elementy są sprawne.
Wyjścia bramki SafetyBUS
Gdy na jakimś wyjściu będą występowały przekaźniki, należy je odłączać
co najmniej raz na 6 miesięcy, upewniając się przy tym, czy elementy są
sprawne.
Pozostałe kontrole trzeba przeprowadzić podczas uruchamiania i zawsze przy
ponownym uruchamianiu.
(>>> 3.8.4 "Pierwsze i ponowne uruchamianie" strona 46)
Ostrzeżenie!
Zaciski wejść/wyjść w bezpiecznych układach magistralowych stosowanych
w układzie sterowania robota należy wymienić najpóźniej po upływie 10 lat..
Bez dokonania wymiany tych elementów po upływie zalecanego okresu
spowoduje utratę pełnego bezpieczeństwa pracy robota. Skutkiem togo
może być zagrożenie utraty życia lub odniesienia obrażeń osób, a także
szkód materialne
3.8.3
Transport
Manipulator
Należy przestrzegać przepisowej pozycji transportowej manipulatora.
Transport musi się odbywać zgodnie ze wskazówkami, zawartymi w instrukcji
użytkowania lub instrukcji montażu manipulatora.
Układ sterowania
robota
Układ sterowania robota musi być transportowany i ustawiany w pozycji
pionowej. Aby nie uszkodzić układu sterowania, podczas transportu należy
unikać wstrząsów lub uderzeń.
Transport musi się odbywać zgodnie ze wskazówkami, zawartymi w instrukcji
użytkowania lub instrukcji montażu układu sterowania robota.
Oś dodatkowa
(opcja)
3.8.4
Należy przestrzegać przepisowej pozycji transportowej robota osi dodatkowej
(np. jednostka liniowa KUKA, stół obrotowo-przechylny, nastawnik). Transport
musi się odbywać zgodnie ze wskazówkami, zawartymi w instrukcji
użytkowania lub instrukcji montażu osi dodatkowych.
Pierwsze i ponowne uruchamianie
Przed przystąpieniem do pierwszego uruchomienia instalacji i urządzeń
należy przeprowadzić kontrolę w celu upewnienia się, czy instalacja i
urządzenia są kompletne i w pełni sprawne, czy można je normalnie i
bezpiecznie użytkować, a także czy nie doszło do żadnych uszkodzeń.
Podczas tej kontroli należy przestrzegać obowiązujących państwowych i
regionalnych przepisów bhp. Dodatkowo należy przetestować działanie
wszystkich obwodów bezpieczeństwa.
Hasła logowania w poziomie Ekspert i Administrator do oprogramowania
KUKA System Software należy przed uruchomieniem zmienić i podać je
autoryzowanym pracownikom.
46 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
3. Bezpieczeństwo
Niebezpieczeństwo!
Układ sterowania robota jest zaprogramowany na pracę określonego robota
przemysłowego. W przypadku pomyłkowego podłączenia kabli, manipulator
i osie dodatkowe (opcja) mogą otrzymać błędne dane i doprowadzić przez to
do obrażeń operatora lub szkód materialnych. Jeśli instalacja składa się z
kilku manipulatorów, każdy manipulator należy połączyć z przynależnym
układem sterowania robota.
Ostrzeżenie!
W przypadku posiadania dodatkowych elementów (np. przewodów), których
nie dostarcza KUKA Roboter GmbH, użytkownik będzie odpowiedzialny za
zadbanie o to, by elementy te nie powodowały utrudnień w działaniu funkcji
bezpieczeństwa ani unieruchamiania robota.
Uwaga!
Gdy temperatura wewnątrz szafy układu sterowania robota będzie mocno
odbiegać od temperatury otoczenia, może dojść do skraplania się pary
wodnej, co z kolei może spowodować uszkodzenie układu elektrycznego.
Układ sterowania robota można uruchomić dopiero wtedy, gdy temperatura
we wnętrzu szafy sterowniczej dostosuje się do temperatury otoczenia.
Przerwy/
zwarcia
poprzeczne
Przerwy lub zwarcia poprzeczne, dotyczące funkcji zabezpieczających i nie
rozpoznawane przez układ sterowania robotem lub program SafeRDW,
trzeba albo wykluczyć (np. konstrukcyjnie) albo klient musi zadbać o ich
wykrywanie (np. za pośrednictwem sterownika PLC lub poprzez sprawdzanie
wyjść).
Zalecenie: należy w konstrukcji wykluczyć występowania zwarć
poprzecznych. W tym zakresie przestrzegać wskazówek podanych w normie
EN ISO 13849-2, tabela D.5, D.6 i D.7.
Przegląd: Możliwe zwarcia poprzeczne, których nie wykrywa układ
sterowania robota ani program SafeRDW
Zwarcie poprzeczne
Kiedy możliwe …
Zwarcie poprzeczne do 0 V
Wyjście ESC napędy WŁ.
Wyjście ESC ZATRZYMANIE
AWARYJNE
Wyjście ESC napędy WŁ.
Zwarcie poprzeczne do 24 V
Zwarcie poprzeczne między
stykami jednego wyjścia
Zwarcie poprzeczne między
stykami różnych wyjść
Zwarcie poprzeczne wyjścia ESC i
wejścia ESC
Zwarcie poprzeczne między
kanałami różnych wejść ESC
Zwarcie poprzeczne między 2
wejściami SafeRDW
Zwarcie poprzeczne wyjścia
SafeRDW do wejścia SafeRDW
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
Wyjście ESC ZATRZYMANIE
AWARYJNE
Wyjście ESC tryb pracy
Wejścia SafeRDW
Wyjście ESC napędy WŁ.
Wyjście ESC ZATRZYMANIE
AWARYJNE
Wyjście ESC tryb pracy
Wejścia ESC
Wejścia SafeRDW
Wyjścia SafeRDW, wejścia
SafeRDW
47 / 101
VKR C2 edition2005
Kontrola
poprawności
działania
Przed pierwszym i ponownym uruchomieniem należy przeprowadzić
następujące kontrole:
Kontrola ogólna:
Co należy zapewnić:
Robot przemysłowy jest prawidłowo ustawiony i przymocowany zgodnie z
instrukcjami podanymi w dokumentacji.
W robocie przemysłowym nie ma żadnych ciał obcych ani zniszczonych,
obluzowanych lub pojedynczych elementów.
Wszystkie niezbędne urządzenia ochronne są zainstalowane i sprawne
technicznie.
Wartości przyłączeniowe robota przemysłowego są zgodne z dostępnym
napięciem sieciowym i strukturą sieci.
Przewód ochronny i przewód wyrównania potencjałów zostały prawidłowo
rozłożone i przyłączone.
Kable łączące zostały prawidłowo podłączone a wtyczki są zaryglowane.
Kontrola obwodów sterowniczych związanych z bezpieczeństwem:
W następujących obwodach sterowniczych związanych z bezpieczeństwem
należy w drodze testu upewnić się, czy działają one prawidłowo:
Miejscowe urządzenie ZATRZYMANIA AWARYJNEGO (= przycisk
ZATRZYMANIA AWARYJNEGO w panelu obsługowym KCP)
Zewnętrzne urządzenie ZATRZYMANIA AWARYJNYEGO (wejście i
wyjście)
Przycisk zatwierdzający (w trybach pracy testowej)
Ochrona operatora (w trybach pracy zautomatyzowanej)
Wejścia kwalifikujące (gdy przyłączono)
Wszystkie pozostałe wykorzystywane wejścia i wyjścia decydujące o
bezpieczeństwie
Sprawdzanie układu sterowania ograniczoną prędkością:
Przy tej kontroli należy wykonać następujące czynności:
1. Zaprogramować tor prosty i maksymalną możliwą prędkość.
2. Ustalić długość toru.
3. W trybie pracy T1 pokonać odcinek toru przy redukcji posuwu (Override
100 %) mierząc przy tym stoperem czasu trwania posuwu.
Ostrzeżenie!
Podczas pokonywania toru ruchu, w obszarze zagrożenia nie mogą
przebywać ludzie.
4. Z wartości długości toru i zmierzonego czasu ruchu wyliczyć prędkość.
Układ sterowania ograniczoną prędkością pracuje poprawnie, gdy będą
osiągane następujące rezultaty:
Dane maszynowe
48 / 101
Ustalona prędkość nie powinna być większa niż 250 mm/sek.
Robot pokonał tor ruchu zgodnie z programem (czyli równo, bez
odchyłek).
Należy zapewnić, aby tabliczka znamionowa, umieszczona na układzie
sterowania robota, posiadała takie same dane maszyny, jak znajdujące się w
deklaracji montażu. Dane maszyny muszą zostać wpisane na tabliczkę
znamionową manipulatora i osi dodatkowych (opcja) podczas uruchamiania.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
3. Bezpieczeństwo
Ostrzeżenie!
Jeśli załadowano nieprawidłowe dane maszyny, nie wolno uruchamiać
robota przemysłowego! Skutkiem takiej zmiany mogą być śmiertelne bądź
ciężkie obrażenia ciała lub poważne szkody materialne. Do maszyny muszą
być wczytane prawidłowe dane.
3.8.5
Ochrona antywirusowa i bezpieczeństwo sieci
Użytkownik robota przemysłowego jest odpowiedzialny za to, aby
oprogramowanie było zawsze zabezpieczone za pomocą aktualnej wersji
ochrony antywirusowej. Jeżeli układ sterowania robota jest zintegrowany z
siecią, ma połączenie z siecią firmy lub z Internetem, zaleca się
zabezpieczenie sieci robota zewnętrzną zaporą firewall.
Dla potrzeb optymalnej eksploatacji naszych produktów zalecamy naszym
klientom, aby regularnie korzystali z ochrony antywirusowej. Informacje dot.
aktualizacji zabezpieczeń (Security Updates) można znaleźć na stronie
www.kuka.com.
3.8.6
Praca ręczna
Praca ręczna jest przewidziana do regulacji instalacji. Regulacja obejmuje
wszystkie prace, które trzeba przeprowadzić w robocie przemysłowym, by
było możliwe uruchomienie pracy zautomatyzowanej. W zakres regulacji
wchodzi:
Tryb impulsowy
Wczytywanie współrzędnych (Teaching)
Programowanie
Weryfikacja programu
Przy pracy ręcznej należy przestrzegać następujących instrukcji:
Jeżeli napędy nie są potrzebne, należy je wyłączyć, aby manipulator lub
osie dodatkowe (opcja) przypadkowo się nie przesunęły.
Nowe lub zmodyfikowane programy należy zawsze najpierw przetestować
w trybie roboczym Ręcznie Ograniczona Prędkość (T1).
Narzędzia, manipulator lub osie dodatkowe (opcja) nie mogą nigdy
dotykać ogrodzenia lub poza nie wystawać.
Części konstrukcyjne, narzędzia i inne przedmioty nie mogą być
zaciskane, prowadzić do zwarć, ani spadać podczas ruchu robota
przemysłowego.
Wszelkie prace z zakresu regulacji należy wykonywać w miarę możliwości
poza obszarem nadzorowanym przez urządzenia ochronne.
Gdy regulacji trzeba dokonać koniecznie w obrębie obszaru nadzorowanego
przez urządzenia ochronne, należy przestrzegać następujących instrukcji.
W trybie pracy Ręcznie Ograniczona Prędkość (T1):
O ile się da, w obszarze nadzorowanym przez urządzenia ochronne nie
mogą przebywać żadne dodatkowe osoby.
Jeśli jednak w obszarze nadzorowanym przez urządzenia ochronne
znajdą się inne osoby, należy przestrzegać następujących instrukcji:
Każda osoba musi być wyposażona w przycisk zatwierdzający.
Wszystkie osoby muszą mieć całego robota przemysłowego w swoim
zasięgu widzenia.
Wszystkie osoby muszą się widzieć nawzajem.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
49 / 101
VKR C2 edition2005
Operator musi przyjąć taką pozycję pracy, z której będzie miał na widoku
cały obszar zagrożenia, mogąc w każdej chwili uciec przed zagrożeniem.
W trybie pracy Ręcznie Wyższa Prędkość (T2):
3.8.7
Tego trybu pracy można użyć tylko wtedy, gdy do testu potrzebna będzie
wyższa prędkość niż w trybie pracy Ręcznie Ograniczona Prędkość.
W tym trybie pracy wczytywanie i programowanie nie są możliwe.
Operator przed rozpoczęciem testowania musi się upewnić, czy przyciski
zatwierdzające są sprawne.
Operator musi zająć pozycję poza obszarem zagrożenia.
W obszarze nadzorowanym przez urządzenia ochronne nie mogą
przebywać żadne dodatkowe osoby. Musi się o to zatroszczyć operator.
Symulacja
Programy symulacyjne nie odpowiadają ściśle warunkom rzeczywistym.
Programy robota, stworzone w programach symulacyjnych, należy
przetestować w urządzeniu w trybie Ręcznie Ograniczona Prędkość (T1). W
razie potrzeby należy opracować program na nowo.
3.8.8
Tryb automatyczny
Praca w trybie automatycznym jest dozwolona wyłącznie przy zachowaniu
następujących środków bezpieczeństwa:
Wszystkie urządzenia zabezpieczające i ochronne są zainstalowane i
sprawne technicznie.
W strefie roboczej instalacji nie przebywają żadne osoby.
Przestrzegane są określone procedury robocze.
Jeżeli manipulator lub oś dodatkowa (opcja) ulegnie zatrzymaniu bez
wyraźnego powodu, do obszaru zagrożenia można wejść dopiero po
włączeniu się ZATRZYMANIA AWARYJNEGO.
3.8.9
Konserwacja i naprawa
Po wykonaniu konserwacji i naprawy należy sprawdzić, czy zmiany nie
spowodowały obniżenia poziomu bezpieczeństwa. Podczas tej kontroli należy
przestrzegać obowiązujących państwowych i regionalnych przepisów bhp.
Dodatkowo należy przetestować działanie wszystkich obwodów
bezpieczeństwa.
Konserwacja i naprawa mają zapewnić utrzymanie lub, w przypadku awarii,
ponowne przywrócenie sprawnego stanu technicznego urządzenia. Naprawa
obejmuje wyszukiwanie usterek i naprawę właściwą.
Podczas wykonywania czynności związanych z robotem przemysłowym
należy podjąć następujące środki bezpieczeństwa:
50 / 101
Czynności robocze wykonywać poza strefą zagrożenia. Jeżeli czynności
robocze należy wykonywać w strefie zagrożenia, użytkownik musi podjąć
dodatkowe środki ostrożności, aby zagwarantować bezpieczeństwo
personelowi.
Wyłączyć robota przemysłowego i zabezpieczyć przed niepowołanym
ponownym włączeniem (np. za pomocą kłódki). Jeżeli czynności robocze
należy wykonywać przy włączonym układzie sterowania robota,
użytkownik musi podjąć dodatkowe środki ostrożności, aby
zagwarantować bezpieczeństwo personelowi.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
3. Bezpieczeństwo
Podczas wykonywania prac przy włączonym układzie sterowania robota,
można to robić wyłącznie w trybie roboczym T1.
Wykonywanie czynności roboczych należy oznaczyć za pomocą tabliczki,
umieszczonej na urządzeniu. Tabliczkę należy tam pozostawić również w
trakcie tymczasowej przerwy w wykonywaniu czynności.
Urządzenia ZATRZYMANIA AWARYJNEGO muszą być aktywne. Jeżeli
funkcje bezpieczeństwa lub urządzenia zabezpieczające ostaną
wyłączone na czas prac związanych z konserwacją i naprawą, po
zakończeniu tych prac należy je natychmiast ponownie włączyć.
Wadliwe komponenty należy wymienić na nowe o tym samym numerze
katalogowym lub na komponenty uznane przez firmę KUKA Roboter GmbH za
równoważne.
Czyszczenie i czynności pielęgnacyjne należy wykonywać zgodnie z
instrukcją obsługi.
Układ sterowania
robota
Części, połączone z urządzeniami peryferyjnymi, mogą się znajdować pod
napięciem również po wyłączeniu układu sterowania robota. Dlatego też,
źródła zewnętrzne muszą zostać wyłączone podczas prac przy układzie
sterowania robota.
W przypadku wykonywania prac związanych z komponentami układu
sterowania robota, należy przestrzegać przepisów dot. podzespołów
zagrożonych elektrostatycznie (niem. EGB).
Po wyłączeniu układu sterowania robota, w niektórych elementach przez kilka
minut może się jeszcze utrzymywać napięcie powyżej 50 V (do 600 V). Aby
nie dopuścić do powstania groźnych dla życia obrażeń, nie wolno w tym
czasie przeprowadzać żadnych prac przy robocie przemysłowym.
Należy bezwzględnie zapobiegać przedostawaniu się wody i brudu do układu
sterowania robota.
Przeciwwaga
Niektóre warianty robota wyposażone są w przeciwwagę
hydropneumatyczną, sprężynową lub gazową.
Hydropneumatyczne lub gazowe przeciwwagi są urządzeniami ciśnieniowymi
i należą do instalacji wymagających nadzoru. W zależności od wersji robota
systemy przeciwwag odpowiadają kategorii II lub III, grupa płynów 2
dyrektywy w sprawie urządzeń ciśnieniowych.
Użytkownik musi przestrzegać ustaw, przepisów i norm dotyczących
urządzeń ciśnieniowych, obowiązujących w kraju przeznaczenia.
Okresy kontroli w Niemczech zgodnie z rozporządzeniem dotyczącym
bezpieczeństwa pracy §14 i §15). Kontrola przed uruchomieniem w miejscu
ustawienia wykonywana przez użytkownika.
Podczas wykonywania czynności związanych z systemem przeciwwagi
należy podjąć następujące środki bezpieczeństwa:
Substancje
niebezpieczne
Podzespoły manipulatora wspomagane przez systemy przeciwwagi
muszą zostać zabezpieczone.
Czynności związane z systemem przeciwwagi może wykonywać
wyłącznie wykwalifikowany personel.
Środki bezpieczeństwa podczas pracy z substancjami niebezpiecznymi:
Unikać dłuższego i powtarzającego się intensywnego kontaktu substancji
niebezpiecznych ze skórą.
W miarę możliwości unikać wdychania mgieł i oparów oleju.
Dbać o właściwe oczyszczanie i pielęgnację skóry.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
51 / 101
VKR C2 edition2005
Dla potrzeb bezpiecznej eksploatacji naszych produktów zalecamy naszym
klientom, aby regularnie domagali się przekazania im aktualnych Kart
Bezpieczeństwa przez producentów substancji niebezpiecznych.
3.8.10
Wycofanie z eksploatacji, składowanie i usuwanie
Wycofanie z eksploatacji, składowanie i usuwanie robota przemysłowego
może odbywać się wyłącznie zgodnie z ustawami, przepisami i normami,
obowiązującymi w kraju przeznaczenia.
3.8.11
Działania bezpieczeństwa w zasadzie "Single Point of Control"
Opis
W czasie ingerowania w określone elementy robota przemysłowego, należy
przeprowadzić działania bezpieczeństwa w myśl zasady "Single Point of
Control”.
Składniki:
Interpretator submitów
PLC
Serwer OPC
Remote Control Tools
Klawiatura/mysz zewnętrzna
Może być niezbędne podjęcie dalszych działań bezpieczeństwa. W
zależności od wypadku, działania te należy skonsultować i powierzyć
integratorowi systemów, programiście lub użytkownikowi instalacji.
Ze względu na to, że tylko integrator systemów zna poprawne stany robocze
elementów wykonawczych w urządzeniach peryferyjnych układu sterownia
robota, do jest obowiązków należy przywracanie ich do stanu prawidłowego
działania w przypadku np. ZATRZYMANIA AWARYJNEGO.
Interpretator
submitów, PLC
Gdy ruchy robota (np. napędy lub chwytaki) są uruchamiane za pomocą
interpretatora submitów lub sterownika PLC za pośrednictwem układ wejść/
wyjść i nie będą one zabezpieczane w żaden sposób, uruchamianie to będzie
działało również w trybach pracy T1 i T2 lub przy działającym ZATRZYMANIU
AWARYJNYM.
Gdy za pomocą interpretatora submitów lub sterownika PLC modyfikowane
będą zmienne działające na ruch robota (np. redukcja posuwu), będzie
działało również w trybach pracy T1 i T2 lub przy działającym ZATRZYMANIU
AWARYJNYM.
Środki bezpieczeństwa:
Serwer OPC,
Remote Control
Tools
52 / 101
Za pomocą interpretatora submitów lub sterownika PLC nie należy
zmieniać sygnałów ani zmiennych związanych z bezpieczeństwem (np.
tryb pracy, ZATRZYMANIE AWARYJNE, zestyk drzwi ochronnych).
Gdy jednak mimo tego trzeba dokonać zmian, wszystkie sygnały i
zmienne związane z bezpieczeństwem należy powiązać tak, za pomocą
interpretatora submitów lub sterownika PLC nie było możliwe ustawienie
stanu zagrażającego bezpiecznej pracy.
Za pomocą tych składników można poprzez umożliwiające zapis dostępy
modyfikować programy, wyjścia lub inne parametry układu sterowania robota
niezauważalnie dla osób przebywających przy instalacji.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
3. Bezpieczeństwo
Środki bezpieczeństwa:
Diagnostykę i wizualizację tych elementów należy powierzać wyłącznie
serwisowi firmy KUKA.
Za pomocą tych składników nie należy modyfikować programów, wyjść
ani żadnych pozostałych parametrów układu sterowania robota.
Klawiatura/mysz
zewnętrzna
Za pomocą tych składników można modyfikować programy, wyjścia lub inne
parametry układu sterowania robota niezauważalnie dla osób przebywających
przy instalacji.
Środki bezpieczeństwa:
3.9
Do każdego układu sterowania robota należy używać tylko jednego
zespołu obsługowego.
W instalacji pracującej z podłączonym programatorem KCP należy
uprzednio odłączyć klawiaturę i mysz.
Stosowane normy i przepisy
Nazwa
Definicja
Wydanie
2006/42/WE
Dyrektywa "Maszyny”:
2006
2004/108/WE
Dyrektywa 2006/42/WE Parlamentu Europejskiego i Rady
Europy z dnia 17 maja 2006 r. w sprawie maszyn i
nowelizacji dyrektywy 95/16/WE (w nowym brzmieniu)
Dyrektywa "Kompatybilność elektromagnetyczna”:
2004
97/23/WE
Dyrektywa 2004/108/WE Parlamentu Europejskiego i
Rady Europy z dnia 15 grudnia 2004 r. w sprawie
ujednolicenia przepisów prawnych w krajach
członkowskich w sprawie kompatybilności
elektromagnetycznej i w sprawie zniesienia dyrektywy 89/
336/WE
Dyrektywa "Urządzenia ciśnieniowe”:
1997
EN ISO 13850
Dyrektywa 97/23/WE Parlamentu Europejskiego i Rady z
dnia 29 maja 1997 r. w sprawie ujednolicenia przepisów
prawnych państw członkowskich w sprawie urządzeń
ciśnieniowych
Bezpieczeństwo maszyn:
2008
EN ISO 13849-1
ZATRZYMANIE AWARYJNE – Zasady projektowania
Bezpieczeństwo maszyn:
2008
EN ISO 13849-2
Elementy układów sterowania związane z
bezpieczeństwem; część 1: Ogólne zasady projektowania
Bezpieczeństwo maszyn:
2008
EN ISO 12100-1
Elementy układów sterowania związane z
bezpieczeństwem; część 2: Weryfikacja
Bezpieczeństwo maszyn:
2003
EN ISO 12100-2
Pojęcia podstawowe, ogólne zasady projektowania; część
1: Podstawowa terminologia, metodyka
Bezpieczeństwo maszyn:
2003
EN ISO 10218-1
Pojęcia podstawowe, ogólne zasady projektowania; część
2: Zasady techniczne
Roboty przemysłowe:
2008
Bezpieczeństwo
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
53 / 101
VKR C2 edition2005
Nazwa
Definicja
Wydanie
EN 614-1
Bezpieczeństwo maszyn:
2006
EN 61000-6-2
Ergonomiczne zasady projektowania; część 1:
Terminologia i wytyczne ogólne
Kompatybilność elektromagnetyczna (EMC):
2005
EN 61000-6-4
część 6-2: Normy ogólne; odporność w środowiskach
przemysłowych
Kompatybilność elektromagnetyczna (EMC):
2007
EN 60204-1
część 6-4: Normy ogólne; norma emisji w środowiskach
przemysłowych
Bezpieczeństwo maszyn:
2006
Wyposażenie elektryczne maszyn, część 1: Wymagania
ogólne
54 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
4. Plan
4
Plan
4.1
Przegląd planu
To jest przegląd najważniejszych informacji w zakresie planu. Sporządzenie
dokładnego planu zależy do zastosowania, typu robota, używanych pakietów
technologicznych i pozostałych okoliczności uwarunkowanych przez klienta.
Z tego powodu przegląd nie może być gwarancją kompletności.
Układ sterowania
robota
Krok
1
2
4.2
Opis
Opis
Kompatybilność
elektromagnetyczna (EMC)
3
Warunki ustawienia sterownika
robota
Warunki przyłączenia
4
Przyłącze sieciowe
5
Obwód ZATRZYMANIA
AWARYJNEGO i urządzenie
ochronne
6
7
Konfiguracja interfejsu XS2/
XS3/XS5 (Audi)
Wyrównanie potencjałów
8
Łącznik KCP (opcja)
9
Poziom zapewnienia
bezpieczeństwa
Informacje
(>>> 4.2 "Kompatybilność
elektromagnetyczna (EMC)"
strona 55)
(>>> 4.3 "Warunki ustawienia"
strona 56)
(>>> 4.4 "Warunki
przyłączenia" strona 58)
(>>> 1.7.1 "Przyłącze sieciowe
XS1" strona 16)
(>>> 4.6 "Podłączanie obwodu
ZATRZYMANIA
AWARYJNEGO i
zabezpieczenia" strona 60)
(>>> 4.7 "Interfejsy VW i Audi"
strona 61)
(>>> 4.8 "Wyrównanie
potencjałów PE" strona 75)
(>>> 4.9 "Wizualizacja
łącznika KCP (opcja)"
strona 76)
(>>> 4.10 "Poziom
zapewnienia bezpieczeństwa"
strona 76)
Kompatybilność elektromagnetyczna (EMC)
Jeśli przewody przyłączeniowe (np. magistrale fieldbus itd.) doprowadzane są
do od zewnątrz do komputera sterującego, można używać tylko przewodów
ekranowych o wystarczających parametrach ekranowania. Ekranowanie
przewodu musi odbywać się na dużej powierzchni w szafie sterowniczej przy
użyciu szyny PE z zaciskami ekranu (przykręcanymi, bez obejm
zaciskowych).
Układ sterowania robota można użytkować wyłącznie w sytuacjach
awaryjnych.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
55 / 101
VKR C2 edition2005
4.3
Warunki ustawienia
Wymiary
Rys. 4-1: Wymiary (podane w mm)
1
2
Chłodnica (fakultatywnie)
Widok przedni
3
4
Widok z boku
Widok z góry
Na ilustracji przedstawiono wymagane odstępy minimalne układu sterowania
robota.
Rys. 4-2: Minimalne odległości (podane w mm)
1
Chłodnica (fakultatywnie)
Ostrzeżenie!
W przypadku braku przestrzegania minimalnych odstępów, może dojść do
uszkodzenia układu sterowania robota. Należy bezwzględnie przestrzegać
podanych odstępów minimalnych.
56 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
4. Plan
Określone prace konserwacyjne i naprawcze w układzie sterowania robota
przeprowadza się od boku lub od tyłu. Musi być do tego dostępny układ
sterowania robota. W przypadku braku dostępu z boku lub z tyłu, musi istnieć
możliwość przemieszczenia układu sterowania robota w takie położenie, w
którym będzie możliwe przeprowadzenie prac.
Minimalne
odległości z szafą
nadstawianą
Rys. 4-3: Minimalne odległości od szafy nadstawianej i technologicznej
1
Szafa nadstawiana
2
Szafa technologiczna
Zakres obrotu
drzwiczek
Rys. 4-4: Zasięg skrzydeł drzwi szafy
Zasięg skrzydeł pojedynczo:
Drzwi z ramą komputera ok. 180 °
W rzędzie obok siebie:
Drzwi ok. 155
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
57 / 101
VKR C2 edition2005
Otwory
Rys. 4-5: Otwory mocowania do podłogi
1
2
4.4
Widok z góry
Widok od dołu
Warunki przyłączenia
Przyłącze
sieciowe
Nominalne napięcie
przyłączeniowe wg DIN/IEC 38
AC 3 x 400 V ... AC 3 x 415 V
Dozwolona tolerancja napięcia
sieciowego
400 V -10 % ... 415 V
Częstotliwości sieciowej
49 ... 61 Hz
Oporność sieci do punktu
podłączenia układu sterowania
robota
≤ 300 mΩ
Nominalna moc wejściowa
7,3 kVA, zob. tabliczka
znamionowa
Standard
Nominalna moc wejściowa
Robot przeznaczony do dużych
obciążeń
Paletyzator
Łącznik pras
Zabezpieczenie sieciowe
Przy zastosowaniu bezpiecznika
automatycznego: Różnica prądu
wyłączającego
Wyrównanie potencjałów
58 / 101
+10 %
13,5 kVA, zob. tabliczka
znamionowa
min. 3x25 A bier., maks. 3x32 A
bier., zob. tabliczka znamionowa
300 mA na każdy układ sterowania
robota, uniwersalny
Wspólnym punktem neutralnym
przewodów wyrównawczych
potencjału i wszystkich przewodów
uziemiających jest szyna
odniesienia podzespołu mocy.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
4. Plan
Uwaga!
Podłączenie sterownika robota do sieci bez uziemionego punktu zerowego
może powodować błędne działanie sterownika i uszkodzenia elementów
sieci. W przeciwnym wypadku spowodować obrażenia ciała związane z
porażeniem prądem elektrycznym. Sterownik robota należy podłączać
wyłącznie do sieci z uziemionym punktem zerowym.
Długości
przewodów
Nazwy przewodów, długości przewodów (standard) oraz długości specjalne
są podane w poniższej tabeli.
Przewód
Przewód silnika
Przewód transmisji
danych
Sieciowy przewód
doprowadzający z XS1
(opcjonalny)
Przewód
Przewód VKCP
Długość
standardowa w mm
Długość specjalna
w mm
7
7
15 / 25 / 35 / 50
15 / 25 / 35 / 50
3
-
Długość
standardowa w mm
10
Przedłużenie w m
10 / 20 / 30 / 40
Jeśli zajdzie taka konieczności, zastosować wyłącznie jeden przedłużacz
VKCP i nie przekraczać łącznej długości kabla, wynoszącej 60 m.
4.5
Opis
Przyłącze sieciowe za pośrednictwem wtyczki CEE XS1
Układ sterowania robota jest podłączony do sieci za pośrednictwem wtyczki
CEE (1). Kabel o długości około 3 m należy poprowadzić przez przepust
kablowy (1) do wyłącznika głównego.
Rys. 4-6
* Przewód N konieczny jest tylko w przypadku gniazdka serwisowego przy
sieci 400 V.
Układ sterowania robota przyłączać tylko do sieci elektrycznej
prawoskrętnej. Tylko wtedy zapewniony jest właściwy kierunek obrotu
silników wentylatora.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
59 / 101
VKR C2 edition2005
Rys. 4-7: Przyłącze sieciowe XS1
4.6
Podłączanie obwodu ZATRZYMANIA AWARYJNEGO i zabezpieczenia
Poniższe przykłady pokazują, jak obwód ZATRZYMANIA AWARYJNEGO
systemu robota może być połączony z innymi systemami robota lub
urządzeniami peryferyjnymi.
Przykład
Rys. 4-8: Robot z urządzeniami peryferyjnymi
60 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
4. Plan
Przykład
Rys. 4-9: Robot ze składnikami peryferyjnymi i zewnętrznym zasilaniem
4.7
Interfejsy VW i Audi
4.7.1
Interfejs VW
Opis
Do złącza XS2 należy podłączyć dodatkowe urządzenia ZATRZYMANIA
AWARYJNEGO lub sprzężyć je ze sobą za pośrednictwem nadrzędnych
układów sterowania (np. PLC).
Układy
Interfejsy XS2/XS3 połączyć z uwzględnieniem następujących punktów:
Plan instalacji
Plan zabezpieczeń
W zależności od używanej karty CI3 dostępne są różne sygnały i funkcje.
(>>> 1.5.1 "Płyty CI3 - zestawienie" strona 14)
Dalsze informacje dotyczące integracji do sterowników nadrzędnych
znajdują się w instrukcji obsługi i programowania integratorów systemów,
rozdział "Wykresy sygnałów automatyki zewnętrznej".
WE/WY
WE/WY mogą być konfigurowane za pośrednictwem następujących
składników:
DeviceNet (Master) za pośrednictwem MFC
Opcjonalne karty magistral feldbus
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
61 / 101
VKR C2 edition2005
4.7.1.1
Interbus
Profibus
DeviceNet
Profinet
Interfejsy użytkownika
Interfejs VW XS2
Rozkład styków
Rys. 4-10
62 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
4. Plan
Sygnał
Styk
Opis wejść / wyjść
Opis
Wyjście testowe A
b1
/TA24V(A)_Extern
(sygnał testowy)
b5
/TA24V(A)_Extern
d7
/TA24V(A)_Extern
Wyjście testowe B
b3
/TA24V(B)_Extern
(sygnał testowy)
b7
/TA24V(B)_Extern
d9
/TA24V(B)_Extern
Udostępnia
napięcie impulsowe
dla pojedynczych
wejść interfejsów
kanału A.
Udostępnia
napięcie impulsowe
dla pojedynczych
wejść interfejsów
kanału B.
Napięcie
sterowania 24 V
maks. 4 A
Napięcie
sterowania 24 V
maks. 4 A
+24 V wewn.
d1
0V
d2
+24 V wewn.
f1
0V
f2
24V_UGP_4A_F13
_SI
Miejscowe
ZATRZYMANIE
AWARYJNE kanał
B
Miejscowe
ZATRZYMANIE
AWARYJNE kanał
A
Interbus-S i
zasilanie ESC DC
24V
a1
GND_NIEBUFORO
WANY
LNA(B)_O
a2
LNA(B)_I
a3
LNA(A)_O
a4
LNA(A)_I
a5
Zewnętrzne
ZATRZYMANIE
AWARYJNE kanał
A
Zewnętrzne
ZATRZYMANIE
AWARYJNE kanał
B
Urządzenie
zabezpieczające,
kanał A
Zabezpieczenie,
kanał B
Wyłącznik
kluczykowy E2
kanał (A)
Wyłącznik
kluczykowy E2
kanał (B)
+24V KCP/MFC
b2
24V_WEJŚCIE_FIL
TR
GND_WEJŚCIE_FI
LTR
ENA(A)
b4
ENA(B)
b6
BS(A)
b8
BS(B)
d8
E2(A)
d10
E2(B)
d11
d12
Wkładka
elektromechaniczna
typu E7
Zmostkowanie
poprzeczne do XS3
a6
Wyjście,
bezpotencjałowe
zestyki
wewnętrznego
ZATRZYMANIA
AWARYJNEGO,
maks. 24 V,
600 mA.
Uwaga
W stanie
nieuruchomionym
zestyki są
zamknięte.
+24 V zewn. (maks.
30 V), maks. 32 W
ZATRZYMANIE
AWARYJNE,
wejście 2-kanałowe,
maks. 24 V, 10 mA.
Wejście ustawione
na 0 V, gdy
ZATRZYMANIE
AWARYJNE jest
włączone.
Do dwukanałowego
przyłącza blokady
drzwi ochronnych
maks. 24 V, 10 mA.
Wejście ustawione
na 0 V, gdy
urządzenie
zabezpieczające
jest włączone.
Układ zamykający
E2 2-kanałowy,
maks. 24 V, 10 mA.
Wejście ustawione
na 0 V, gdy układ
zamykający jest
wyłączony.
+VCC_KCP/MFC
20..0,33 V
INPUT1_MFC
Input 1
+ 24V układu
zamykającego E7
Wejście układu
zamykającego E7
b11
do XS3 styk a7
b12
do XS3 styk a8
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
63 / 101
VKR C2 edition2005
Interfejs XS2 składa się z modułów Harting. Typ: Han DD, 12-stykowe
moduły gniazdowe i trzpieniowe.
4.7.1.2
Interfejs VW XS2 z kartą CI3-Tech
Rozkład styków
Rys. 4-11
64 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
4. Plan
Sygnał
Styk
Opis wejść / wyjść
Opis
Wyjście testowe A
b1
/TA24V(A)_Extern
(sygnał testowy)
b5
/TA24V(A)_Extern
d7
/TA24V(A)_Extern
Wyjście testowe B
f3
b3
/TA24V(A)_Extern
/TA24V(B)_Extern
Udostępnia
napięcie impulsowe
dla pojedynczych
wejść interfejsów
kanału A.
(sygnał testowy)
b7
/TA24V(B)_Extern
d9
/TA24V(B)_Extern
/TA24V(B)_Extern
+24 V wewn.
f5
d1
0V
d2
+24 V wewn.
f1
0V
f2
24V_UGP_4A_F13
_SI
Miejscowe
ZATRZYMANIE
AWARYJNE kanał
B
Miejscowe
ZATRZYMANIE
AWARYJNE kanał
A
Interbus-S i
zasilanie ESC DC
24V
a1
GND_NIEBUFORO
WANY
LNA(B)_O
a2
LNA(B)_I
a3
LNA(A)_O
a4
LNA(A)_I
a5
Zewnętrzne
ZATRZYMANIE
AWARYJNE kanał
A
Zewnętrzne
ZATRZYMANIE
AWARYJNE kanał
B
Urządzenie
zabezpieczające,
kanał A
Zabezpieczenie,
kanał B
Wyłącznik
kluczykowy E2
kanał (A)
Wyłącznik
kluczykowy E2
kanał (B)
Układ zamykający
E7 kanał A
b2
24V_WEJŚCIE_FIL
TR
GND_WEJŚCIE_FI
LTR
ENA(A)
b4
ENA(B)
b6
BS(A)
b8
BS(B)
d8
E2(A)
d10
E2(B)
d11
CR_TA (A)
d12
E7 (A)
a6
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
Uwaga
Udostępnia
napięcie impulsowe
dla pojedynczych
wejść interfejsów
kanału B.
Napięcie
sterowania 24 V
maks. 4 A
Napięcie
sterowania 24 V
maks. 4 A
Wyjście,
bezpotencjałowe
zestyki
wewnętrznego
ZATRZYMANIA
AWARYJNEGO,
maks. 24 V,
600 mA.
W stanie
nieuruchomionym
zestyki są
zamknięte.
+24 V zewn. (maks.
30 V), maks. 32 W
ZATRZYMANIE
AWARYJNE,
wejście 2-kanałowe,
maks. 24 V, 10 mA.
Wejście ustawione
na 0 V, gdy
ZATRZYMANIE
AWARYJNE jest
włączone.
Do dwukanałowego
przyłącza blokady
drzwi ochronnych
maks. 24 V, 10 mA.
Wejście ustawione
na 0 V, gdy
urządzenie
zabezpieczające
jest włączone.
Układ zamykający
E2 2-kanałowy,
maks. 24 V, 10 mA.
Wejście ustawione
na 0 V, gdy układ
zamykający jest
wyłączony.
20..0,33 V
+ 24V układu
zamykającego E7
Wejście układu
zamykającego E7
65 / 101
VKR C2 edition2005
Sygnał
Styk
Opis wejść / wyjść
Opis
Uwaga
Układ zamykający
E7 kanał B
d3
CR_TA (B)
20..0,33 V
d4
E7 (B)
Wejście
kwalifikujące kanał
A
Wejście
kwalifikujące kanał
B
f4
QE (A)
f6
QE(B)
Zmostkowanie
poprzeczne do XS3
b11
+ 24V układu
zamykającego E7
Wejście układu
zamykającego E7
Jeśli te wejścia nie
są używane, trzeba
zmostkować styk f4
z wyjściem
testowym f3 oraz
styk f6 z wyjściem
testowym f5.
do XS3 styk a7
b12
do XS3 styk a8
Sygnał 0 prowadzi
we wszystkich
trybach pracy do
ZATRZYMANIA
kategorii 0.
Interfejs XS2 składa się z modułów Harting. Typ: Han DD, 12-stykowe
moduły gniazdowe i trzpieniowe.
4.7.1.3
Interfejs VW XS3
Rozkład styków
Rys. 4-12
66 / 101
Sygnał
Styk
Opis wejść / wyjść
Opis
Uwaga
Człony nastawcze
start 1
Człony nastawcze
start 2
a2
AE_OUT_4A
24 V, maks. 4 A
24 V przy napędach
wł.
a4
AE_OUT_2A
24 V, maks. 2 A
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
4. Plan
Sygnał
Styk
Opis wejść / wyjść
Opis
Uwaga
Człony nastawcze
GND 1
Człony nastawcze
GND 2
Tryb roboczy Test
a1
0 V wewn.
0 V członów
nastawczych
b2
GND_niebuforowan
y
GND_niebuforowan
y
TR_TEST
Tryb roboczy
automatyka zewn.
b3
BA_AUTO
Napędy wł. kanał B
b4
AE_IN
b5
AE_OUT_7,5A
a3
a5
Napięcie
sterownicze 24 V
a6
Napięcie
sterownicze 0 V
Zmostkowanie
poprzeczne do XS2
0 V wewn.
Bezpotencjałowe
zestyki obwodu
zabezpieczającego
informują o trybie
pracy, maks. 30 V /
0,1 A
Zestyki te występują
tylko w przypadku
stosowania płyty
CI3-Extended lub
CI3-Tech.
Bezpotencjałowe
zestyki obwodu
zabezpieczającego
informują o trybie
pracy. Maks. 30 V /
7,5 A
Zestyki te występują
tylko w przypadku
stosowania płyty
CI3-Extended lub
CI3-Tech.
24 V / 8 A
Zestyk Test b1 / b2
jest zamknięty, gdy
na VKCP jest
wybrany tryb pracy
Test.
Zestyk Automatyka
b1 / b3 jest
zamknięty, gdy na
VKCP jest wybrany
tryb pracy
Automatyka zewn.
Włączone, gdy
zaciśnięty jest
stycznik "Napędy
wł.".
Sygnalizatory i
składniki magistrali
a7
do XS2 b11
a8
do XS2 b12
Interfejs XS3 składa się z modułów Harting. Typ: Han DD, 12-stykowe
moduły gniazdowe i trzpieniowe.
4.7.2
Interfejs Audi
Opis
Do złącza XS2 należy podłączyć dodatkowe urządzenia ZATRZYMANIA
AWARYJNEGO lub sprzężyć je ze sobą za pośrednictwem nadrzędnych
układów sterowania (np. PLC).
Układy
Interfejsy XS2/XS3/XS5 połączyć z uwzględnieniem następujących punktów:
Plan instalacji
Plan zabezpieczeń
W zależności od używanej karty CI3 dostępne są różne sygnały i funkcje.
(>>> 1.5.1 "Płyty CI3 - zestawienie" strona 14)
Dalsze informacje dotyczące integracji do sterowników nadrzędnych
znajdują się w instrukcji obsługi i programowania integratorów systemów,
rozdział "Wykresy sygnałów automatyki zewnętrznej".
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
67 / 101
VKR C2 edition2005
WE/WY
4.7.2.1
WE/WY mogą być konfigurowane za pośrednictwem następujących
składników:
DeviceNet (Master) za pośrednictwem MFC
Opcjonalne karty magistral feldbus
Interbus
Profibus
DeviceNet
Profinet
Interfejsy użytkownika
Interfejs Audi XS2
Rozkład styków
Rys. 4-13
68 / 101
Sygnał
Sty
k
Opis wejść / wyjść
Opis
Wyjście testowe A
b1
/TA24V(A)_Extern
(sygnał testowy)
b5
/TA24V(A)_Extern
Wyjście testowe B
b3
/TA24V(B)_Extern
(sygnał testowy)
b7
/TA24V(B)_Extern
Udostępnia
napięcie
impulsowe dla
pojedynczych
wejść interfejsów
kanału A.
Udostępnia
napięcie
impulsowe dla
pojedynczych
wejść interfejsów
kanału B.
Uwaga
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
4. Plan
Sygnał
Sty
k
Opis wejść / wyjść
Opis
+24 V wewn.
f1
24V_UGP_4A_F13_SI
0V
f2
Miejscowe
ZATRZYMANIE
AWARYJNE kanał
B
Miejscowe
ZATRZYMANIE
AWARYJNE kanał
A
Interbus-S i
zasilanie ESC DC
24V
a1
GND_NIEBUFOROW
ANY
LNA(B)_O
Napięcie
sterowania 24 V
maks. 4 A
a2
LNA(B)_I
a3
LNA(A)_O
a4
LNA(A)_I
a5
a6
Zewnętrzne
ZATRZYMANIE
AWARYJNE kanał
A
Zewnętrzne
ZATRZYMANIE
AWARYJNE kanał
B
Urządzenie
zabezpieczające,
kanał A
Zabezpieczenie,
kanał B
b2
24V_WEJŚCIE_FILTR
GND_WEJŚCIE_FILT
R
ENA(A)
b4
ENA(B)
b6
BS(A)
b8
BS(B)
Zmostkowanie
poprzeczne do
XS3
Wyjście,
bezpotencjałowe
zestyki
wewnętrznego
ZATRZYMANIA
AWARYJNEGO,
maks. 24 V,
600 mA.
Uwaga
W stanie
nieuruchomionym
zestyki są
zamknięte.
+24 V zewn.
(maks. 30 V),
maks. 32 W
ZATRZYMANIE
AWARYJNE,
wejście 2kanałowe, maks.
24 V, 10 mA.
Wejście ustawione
na 0 V, gdy
ZATRZYMANIE
AWARYJNE jest
włączone.
Do
dwukanałowego
przyłącza blokady
drzwi ochronnych
maks. 24 V,
10 mA.
Wejście ustawione
na 0 V, gdy
urządzenie
zabezpieczające
jest włączone.
b11
do XS3 styk a7
b12
do XS3 styk a8
Interfejs XS2 składa się z modułów Harting. Typ: Han DD, 12-stykowe
moduły gniazdowe i trzpieniowe.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
69 / 101
VKR C2 edition2005
4.7.2.2
Interfejs Audi XS2 z kartą CI3-Tech-Board
Rozkład styków
Rys. 4-14
70 / 101
Sygnał
Sty
k
Opis wejść / wyjść
Opis
Wyjście testowe A
b1
/TA24V(A)_Extern
(sygnał testowy)
b5
/TA24V(A)_Extern
f3
/TA24V(A)_Extern
Wyjście testowe B
b3
/TA24V(B)_Extern
(sygnał testowy)
b7
/TA24V(B)_Extern
f5
/TA24V(B)_Extern
+24 V wewn.
f1
24V_UGP_4A_F13_SI
0V
f2
GND_NIEBUFOROW
ANY
Udostępnia
napięcie
impulsowe dla
pojedynczych
wejść interfejsów
kanału A.
Udostępnia
napięcie
impulsowe dla
pojedynczych
wejść interfejsów
kanału B.
Napięcie
sterowania 24 V
maks. 4 A
Uwaga
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
4. Plan
Sty
k
Opis wejść / wyjść
Opis
Uwaga
Miejscowe
ZATRZYMANIE
AWARYJNE kanał
B
Miejscowe
ZATRZYMANIE
AWARYJNE kanał
A
Interbus-S i
zasilanie ESC DC
24V
a1
LNA(B)_O
a2
LNA(B)_I
W stanie
nieuruchomionym
zestyki są
zamknięte.
a3
LNA(A)_O
a4
LNA(A)_I
Wyjście,
bezpotencjałowe
zestyki
wewnętrznego
ZATRZYMANIA
AWARYJNEGO,
maks. 24 V,
600 mA.
a5
a6
Zewnętrzne
ZATRZYMANIE
AWARYJNE kanał
A
Zewnętrzne
ZATRZYMANIE
AWARYJNE kanał
B
Urządzenie
zabezpieczające,
kanał A
Zabezpieczenie,
kanał B
b2
24V_WEJŚCIE_FILTR
GND_WEJŚCIE_FILT
R
ENA(A)
b4
ENA(B)
b6
BS(A)
b8
BS(B)
f4
QE (A)
f6
QE(B)
Sygnał
Wejście
kwalifikujące kanał
A
Wejście
kwalifikujące kanał
B
Zmostkowanie
poprzeczne do
XS3
+24 V zewn.
(maks. 30 V),
maks. 32 W
ZATRZYMANIE
AWARYJNE,
wejście 2kanałowe, maks.
24 V, 10 mA.
Wejście ustawione
na 0 V, gdy
ZATRZYMANIE
AWARYJNE jest
włączone.
Do
dwukanałowego
przyłącza blokady
drzwi ochronnych
maks. 24 V,
10 mA.
Sygnał 0 prowadzi
we wszystkich
trybach pracy do
ZATRZYMANIA
kategorii 0.
Wejście ustawione
na 0 V, gdy
urządzenie
zabezpieczające
jest włączone.
b11
Jeśli te wejścia nie
są używane,
trzeba zmostkować
styk f4 z wyjściem
testowym f3 oraz
styk f6 z wyjściem
testowym f5.
do XS3 styk a7
b12
do XS3 styk a8
Interfejs XS2 składa się z modułów Harting. Typ: Han DD, 12-stykowe
moduły gniazdowe i trzpieniowe.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
71 / 101
VKR C2 edition2005
4.7.2.3
Interfejs Audi XS3
Rozkład styków
Rys. 4-15
72 / 101
Sygnał
Styk
Opis wejść / wyjść
Opis
Uwaga
Człony nastawcze
start 1
Człony nastawcze
start 2
Człony nastawcze
GND 1
Człony nastawcze
GND 2
Tryb roboczy Test
a2
AE_OUT_4A
24 V, maks. 4 A
24 V przy napędach
wł.
a4
AE_OUT_2A
24 V, maks. 2 A
a1
0 V wewn.
b2
GND_niebuforowan
y
GND_niebuforowan
y
TR_TEST
Tryb roboczy
automatyka zewn.
b3
BA_AUTO
a3
0 V członów
nastawczych
0 V wewn.
Bezpotencjałowe
zestyki obwodu
zabezpieczającego
informują o trybie
pracy. Maks. 30 V /
0,1 A
Zestyki te występują
tylko w przypadku
stosowania płyty
CI3-Extended lub
CI3-Tech.
Zestyk Test b1 / b2
jest zamknięty, gdy
na VKCP jest
wybrany tryb pracy
Test.
Zestyk Automatyka
b1 / b3 jest
zamknięty, gdy na
VKCP jest wybrany
tryb pracy
Automatyka zewn.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
4. Plan
Sygnał
Styk
Opis wejść / wyjść
Opis
Uwaga
Napędy wł. kanał B
b4
AE_IN
b5
AE_OUT_7,5A
Bezpotencjałowe
zestyki obwodu
zabezpieczającego
informują o trybie
pracy, maks. 30 V /
7,5 A
Włączone, gdy
zaciśnięty jest
stycznik "Napędy
wł.".
Napięcie
sterownicze 24 V
Napięcie
sterownicze 0 V
Zmostkowanie
poprzeczne do XS2
Zestyki te występują
tylko w przypadku
stosowania płyty
CI3-Extended lub
CI3-Tech.
24 V / 8 A
a5
a6
Sygnalizatory i
składniki magistrali
a7
do XS2 b11
a8
do XS2 b12
Interfejs XS3 składa się z modułów Harting. Typ: Han DD, 12-stykowe
moduły gniazdowe i trzpieniowe.
4.7.2.4
Interfejs Audi XS5
Rozkład styków
Rys. 4-16
Sygnał
Styk
Opis wejść / wyjść
Opis
Uwaga
Wyjście testowe A
d7
/TA24V(A)_Extern
Do układu
zamykającego E2
d9
/TA24V(B)_Extern
Udostępnia
napięcie impulsowe
dla pojedynczych
wejść interfejsów
kanału A.
Udostępnia
napięcie impulsowe
dla pojedynczych
wejść interfejsów
kanału B.
Napięcie
sterowania 24 V
maks. 4 A
(sygnał testowy)
Wyjście testowe B
(sygnał testowy)
+24 V wewn.
d1
0V
d2
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
73 / 101
VKR C2 edition2005
Sygnał
Styk
Opis wejść / wyjść
Opis
Uwaga
Wyłącznik
kluczykowy E2
kanał (A)
Wyłącznik
kluczykowy E2
kanał (B)
+24V KCP/MFC
d8
E2(A)
Układ zamykający
E2 2-kanałowy,
maks. 24 V, 10 mA.
d10
E2(B)
Wejście ustawione
na 0 V, gdy układ
zamykający jest
wyłączony.
d11
+VCC_KCP/MFC
20...33 V
d12
INPUT1_MFC
Input 1
+ 24V układu
zamykającego E7
Wejście układu
zamykającego E7
Układ zamykający
E7
Interfejs XS5 składa się z modułu Harting. Typ: Han DD, 12-stykowe moduł
trzpieniowy.
4.7.2.5
Interfejs Audi XS5 z kartą CI3-Tech-Board
Rozkład styków
Rys. 4-17
Sygnał
Styk
Opis wejść / wyjść
Opis
Uwaga
Wyjście testowe A
d7
/TA24V(A)_Extern
Do układu
zamykającego E2
d9
/TA24V(B)_Extern
Udostępnia
napięcie impulsowe
dla pojedynczych
wejść interfejsów
kanału A.
Udostępnia
napięcie impulsowe
dla pojedynczych
wejść interfejsów
kanału B.
Napięcie
sterowania 24 V
maks. 4 A
Układ zamykający
E2 2-kanałowy,
maks. 24 V, 10 mA.
(sygnał testowy)
Wyjście testowe B
(sygnał testowy)
74 / 101
+24 V wewn.
d1
0V
d2
Wyłącznik
kluczykowy E2
kanał (A)
Wyłącznik
kluczykowy E2
kanał (B)
d8
E2(A)
d10
E2(B)
Wejście ustawione
na 0 V, gdy układ
zamykający jest
wyłączony.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
4. Plan
Sygnał
Styk
Opis wejść / wyjść
Opis
Uwaga
Układ zamykający
E7 kanał A
d11
CR_TA (A)
20...33 V
d12
E7 (A)
d3
CR_TA (B)
d4
E7 (B)
+ 24V układu
zamykającego E7
Wejście układu
zamykającego E7
+ 24V układu
zamykającego E7
Wejście układu
zamykającego E7
Układ zamykający
E7 kanał B
20...33 V
Interfejs XS5 składa się z modułu Harting. Typ: Han DD, 12-stykowe moduł
trzpieniowy.
4.8
Opis
Wyrównanie potencjałów PE
Przed uruchomieniem należy jeszcze podłączyć następujące przewody:
Przewód o średnicy 16 mm2 służący jako wyrównanie potencjałów
między robotem a układem sterowania robota.
Dodatkowy przewód wyrównania potencjałów PE między szyną centralną
PE szafy zasilania a bolcami PE układu sterowania robota.
Rys. 4-18: Wyrównanie potencjałów między układem sterowania robota
a robotem z kanałem kablowym
1
2
3
4
5
6
7
8
Przewód PE do centralnej szyny PE szafy zasilania
Panel przyłączeniowy układu sterowania robota
Przyłącze wyrównania potencjałów w robocie
Wyrównanie potencjałów od układu sterowania robota do robota
Kanał kablowy
Wyrównanie potencjałów od początku kanału kablowego do
głównego wyrównania potencjałów
Główne wyrównanie potencjałów
Wyrównanie potencjałów od końca kanału kablowego do głównego
wyrównania potencjałów
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
75 / 101
VKR C2 edition2005
Rys. 4-19: Wyrównanie potencjałów między układem sterowania robota
a robotem
1
2
3
4
4.9
Opis
Przewód PE do centralnej szyny PE szafy zasilania
Panel przyłączeniowy układu sterowania robota
Wyrównanie potencjałów od układu sterowania robota do robota
Przyłącze wyrównania potencjałów w robocie
Wizualizacja łącznika KCP (opcja)
W przypadku użytkowania układu sterowania robota z podłączanym /
odłączanym panelem KCP, muszą wyświetlać się następujące zmienne
systemowe:
$T1 (tryb roboczy T1)
$T2 (tryb roboczy T2)
$EXT (tryb roboczy zewnętrzny)
$AUT (Tryb roboczy automatyka)
$ALARM_STOP
$PRO_ACT (program uruchomiony)
Wskazanie można skonfigurować za pośrednictwem wejść/wyjść lub
sterownika PLC. Zmienne systemowe można wykonać w pliku: STEU/
$MACHINE.DAT.
Ostrzeżenie!
Jeśli panel KCP będzie odłączony, wyłączenie instalacji za pośrednictwem
przycisku ZATRZYMANIA AWARYJNEGO panelu KCP będzie niemożliwe.
W celu ochrony osób i maszyn przed zagrożeniami, do złącza X11 musi być
przyłączone zewnętrzne ZATRZYMANIE AWARYJNE.
4.10
Poziom zapewnienia bezpieczeństwa
Funkcje zabezpieczające w układzie sterowania robota spełniają wymogi
kategorii 3 i poziomowi zapewnienia bezpieczeństwa (PL) d zgodnie z normą
EN ISO 13849-1.
4.10.1
Wartości PFH funkcji zabezpieczających
Parametry związane z techniką bezpieczeństwa zostały przewidziane na 20
lat.
76 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
4. Plan
Klasyfikacja wartości PFH układu sterowania obowiązuje tylko w przypadku
przestrzegania okresów kontrolnych przycisków ZATRZYMANIA
AWARYJNEGO, przełączników trybów roboczych, jak również częstości
łączeń styczników. Przyciski ZATRZYMANIA AWARYJNEGO i przełączniki
trybów roboczych należy uruchamiać co najmniej raz na ½ roku. Częstość
łączeń styczników wynosi co najmniej 2 razy w roku, maksymalnie 100 razy
dziennie.
Dokonując oceny funkcji zabezpieczających na poziomie instalacji należy
uwzględnić, że wartości PFH w przypadku połączenia kilku układów
sterowania muszą być uwzględniane odpowiednią wielokrotność. Ma to
miejsce w instalacjach RoboTeam lub w nadrzędnych obszarach zagrożenia.
Wartość PFH ustalona do funkcji zabezpieczającej na poziomie instalacji nie
powinna przekraczać granicy poziomu zapewnienia bezpieczeństwa (PL).
Wartości PFH odnoszą się zawsze do funkcji zabezpieczających
poszczególnych wariantów układu sterowania.
Grupy funkcji zabezpieczających:
Standard funkcji zabezpieczających (ESC)
Urządzenie ZATRZYMANIA AWARYJNEGO (KCP, szafa, interfejs
klienta)
Ochrona operatora (interfejs klienta)
Akceptacja (KCP, interfejs klienta)
Tryb pracy (KCP, interfejs klienta)
Zatrzymanie bezpieczeństwa (interfejs klienta)
Funkcje zabezpieczające KUKA.SafeOperation (opcja)
Nadzorowanie obszarów osi
Nadzorowanie obszarów kartezjańskiego układu współrzędnych
Nadzorowanie prędkości osi
Monitorowanie prędkości kartezjańskiej
Monitorowanie przyspieszenia osiowego
Monitorowanie braku ruchu
Przegląd wariantów układu sterowania – wartości PFH:
Warianty układu sterowania robota
Wartość PFH
(V)KR C2 (edition2005)
1 x 10-7
(V)KR C2 (edition2005) i 1 szafa nadstawiana
1 x 10-7
(V)KR C2 (edition2005) z 2 szafami nadstawianymi
1 x 10-7
(V)KR C2 (edition2005) z łącznikiem KCP
1 x 10-7
(V)KR C2 edition2005 z KUKA.SafeOperation
1 x 10-7
(V)KR C2 (edition2005) z 2 szafami nadstawianymi i
KUKA.SafeOperation
KR C2 edition2005 titan
1 x 10-7
KR C2 edition2005 titan z szafą nadstawianą
1 x 10-7
KR C2 edition2005 titan z łącznikiem KCP
1 x 10-7
KR C2 edition2005 titan z KUKA.SafeOperation
1 x 10-7
(V)KR C2 (edition2005) RoboTeam (standard) z 5
urządzeniami slave
(V)KR C2 (edition2005) z bramką Safetybus Gateway
3 x 10-7
(V)KR C2 (edition2005) z bramką Safetybus Gateway i
łącznikiem KCP
3 x 10-7
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
1 x 10-7
3 x 10-7
77 / 101
VKR C2 edition2005
Warianty układu sterowania robota
(V)KR C2 (edition2005) z łącznikiem KCP, bramką
Safetybus Gateway i KUKA.SafeOperation ze złączem
WE/WY przez transoptor i szafą nadstawianą
(V)KR C2 (edition2005) RoboTeam (z łącznikiem KCP,
bramką Safetybus Gateway) z 2 urządzeniami slave,
każde z 2 szafami nadstawianymi i
KUKA.SafeOperation
(V)KR C2 (edition2005) RoboTeam (standard) z 5
urządzeniami slave i KUKA.SafeOperation
KR C2 edition2005 titan z bramką Safetybus Gateway
KR C2 edition2005 titan z bramką Safetybus Gateway i
łącznikiem KCP
Wartość PFH
3 x 10-7
3 x 10-7
3 x 10-7
3 x 10-7
3 x 10-7
W sprawie wariantów układu sterowania, które nie zostały wyszczególnione
w tym miejscu, należy się skontaktować z firmą KUKA Roboter GmbH.
78 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
5. Transport
5
Transport
5.1
Transport za pomocą uprzęży transportowej
Warunki wstępne
Układ sterowania robota musi być wyłączony.
Do układu sterowania robota nie mogą być podłączone żadne przewody.
Układ sterowania robota musi być zamknięty.
Układ sterowania robota musi znajdować się w pozycji pionowej.
Do układu sterowania robota należy przymocować uchwyty chroniące
przed przechyleniem.
Potrzebne
materiały
Uprząż transportowa z lub bez krzyża transportowego
Sposób
postępowania
1. Zamocować uprząż transportową z lub bez krzyża transportowego na
układzie sterowania robota za pomocą wszystkich 4 zaczepów
transportowych.
Rys. 5-1: Transport za pomocą uprzęży transportowej
1
2
3
4
Zaczepy transportowe do układu sterowania robota
Prawidłowo zamocowana uprząż transportowa
Prawidłowo zamocowana uprząż transportowa
Nieprawidłowo zamocowana uprząż transportowa
2. Zawiesić uprząż transportową na dźwigu.
Niebezpieczeństwo!
Zawieszony układ sterowania robota może się przechylać przy zbyt szybkim
transportowaniu, co wiąże się z niebezpieczeństwem powstania ran i szkód
rzeczowych. Układ sterowania robota należy transportować powoli.
3. Powoli podnieść i przetransportować układ sterowania robota.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
79 / 101
VKR C2 edition2005
4. Powoli opuścić układ sterowania robota w miejscu przeznaczenia.
5. Odczepić zaczepy transportowe od układu sterowania robota.
5.2
Transport za pomocą wózka podnośnikowego
Warunki wstępne
Układ sterowania robota musi być wyłączony.
Do układu sterowania robota nie mogą być podłączone żadne przewody.
Układ sterowania robota musi być zamknięty.
Układ sterowania robota musi znajdować się w pozycji pionowej.
Do układu sterowania robota należy przymocować uchwyty chroniące
przed przechyleniem.
Sposób
postępowania
Rys. 5-2: Transport za pomocą wózka podnośnikowego
1
2
5.3
Szafa sterownicza z uchwytami chroniącymi przed
przechyleniem.
Podniesiony układ sterowania robota
Transport za pomocą wózka widłowego
Warunki wstępne
Układ sterowania robota musi być wyłączony.
Do układu sterowania robota nie mogą być podłączone żadne przewody.
Układ sterowania robota musi być zamknięty.
Układ sterowania robota musi znajdować się w pozycji pionowej.
Do układu sterowania robota należy przymocować uchwyty chroniące
przed przechyleniem.
Sposób
postępowania
Rys. 5-3: Transport za pomocą wózków widłowych
1
2
80 / 101
Układ sterowania robota z kieszeniami do wózka widłowego
Układ sterowania robota z podstawą transformatorową
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
5. Transport
5.4
Transport na wózkach kołowych (opcja)
Układ sterowania robota za kółkach można tylko wysuwać lub wsuwać do
szeregu szaf sterowniczych, natomiast nie można go na nich transportować.
Rys. 5-4: Transport na kółkach
Ostrzeżenie!
Podczas ściągania układu sterowania robota z pojazdu (wózka widłowego,
podnośnika elektrycznego), może dojść do uszkodzenia kółek i układu
sterowania robota. Układu sterowania robota nie można transportować na
kółkach doczepionego do pojazdu ciągnącego.
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
81 / 101
VKR C2 edition2005
82 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
6. Pierwsze i ponowne uruchamianie
6
Pierwsze i ponowne uruchamianie
6.1
Zestawienie Uruchamianie
To jest przegląd najważniejszych informacji w zakresie uruchamiania.
Sporządzenie dokładnego przebiegu pracy zależy od zastosowania, typu
robota, używanych pakietów technologicznych i pozostałych okoliczności
uwarunkowanych przez klienta.
Niniejszy przegląd odnosi się do uruchamiania systemu robota.
Przedmiotem niniejszej dokumentacji nie jest uruchamianie całej instalacji.
Z tego powodu przegląd nie może być gwarancją kompletności.
Robot
Krok
1
2
3
Opis
Przeprowadzić kontrolę wzrokową robota
Zamontować zamocowanie robota.
(mocowanie do fundamentu, mocowanie
stojaka maszyny, stelaż montażowy)
Ustawianie robota
Instalacja
elektryczna
Krok
Opis
4
Przeprowadzić kontrolę wzrokową sterownika
silnika
5
Upewnić się, że w sterowniu robota nie skrapla
się para wodna
6
Ustawienie sterownika robota
7
Podłączyć przewody łączące
8
Podłączenie VKCP
9
Wykonać wyrównanie potencjałów między
robotem a sterownikiem robota
10
11
Podłączyć sterownik silnika do sieci
Usuwanie zabezpieczenia przed
rozładowaniem akumulatora
12
Konfiguracja i podłączenie interfejsu XS2/XS3/
XS5 (Audi)
13
Wskazówka: Przy odłączonym złączu XS2
ręczne poruszanie robotem będzie niemożliwe.
Włączanie układu sterowania robota
14
Sprawdzenie kierunku obrotu wentylatora
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
Informacje
Dalsze informacje znajdują się w
instrukcji obsługi robota, rozdział
"Uruchamianie"
Informacje
(>>> 6.2 "Ustawianie sterownika
robota." strona 85)
(>>> 6.3 "Podłączania
przewodów łączących" strona 85)
(>>> 6.4 "Podłączenie VKCP"
strona 86)
(>>> 6.5 "Podłączenie
wyrównania potencjałów PE"
strona 86)
(>>> 6.7 "Usuwanie
zabezpieczenia przed
rozładowaniem akumulatora"
strona 86)
(>>> 6.9 "Konfiguracja i
podłączenie wtyków XS2/XS3/
XS5 (Audi)" strona 87)
(>>> 6.10 "Włączanie układu
sterowania robota" strona 87)
(>>> 6.11 "Sprawdzenie kierunku
obrotu wentylatora zewnętrznego"
strona 87)
83 / 101
VKR C2 edition2005
Krok
15
16
Opis
Sprawdzić zabezpieczenia
Informacje
Dalsze informacje znajdują się w
instrukcji obsługi sterownika
robota, rozdział "Bezpieczeństwo"
Szczegółowe informacje na ten
temat znajdują się w dokumentacji
magistrali feldbus
Skonfigurować wejścia / wyjścia między
sterownikiem silnika a urządzeniami
zewnętrznymi
Oprogramowanie
Krok
17
18
19
21
Opis
Sprawdzanie danych maszyny
Skalibrować robota przy braku obciążenia
Dołączyć narzędzie i skalibrować robota z
obciążeniem
Sprawdzić i ewentualnie dopasować
programowy łącznik krańcowy
Mierzenie narzędzia
22
23
W przypadku narzędzia stacjonarnego:
Mierzenie zewnętrznego TCP
Wprowadzanie danych obciążenia
Zmierzyć podstawę. (opcja)
20
24
Informacje
Dalsze informacje znajdują się w
instrukcji obsługi i programowania.
W przypadku narzędzia stacjonarnego:
Zmierzyć przedmiot obrabiany. (opcja)
Jeśli robot jest sterowany przez komputer
główny lub sterownik PLC: Skonfigurować
standardowe złącze zewnętrznej automatyki
Dalsze informacje znajdują się w
instrukcji obsługi i programowania
integratorów systemów.
Długie nazwy wejść / wyjść, flagi itp. można zapisać do pliku tekstowego, z
którego będą one wczytywane po ponownej instalacji. W ten sposób nie
trzeba wpisywać tych tekstów ręcznie w każdym robocie. Ponadto teksty
nazw można aktualizować w programach użytkownika.
wyposażenie
Warunek: Robot jest gotowy do ruchu. Czyli uruchomienie oprogramowanie
zostało wykonane do punktu "Skalibrować robota przy braku obciążenia"
włącznie.
Opis
Opcja: Zamontować ograniczniki zakresu osi. Dopasować
programowe łączniki krańcowe.
Opcja: Zamontować układy monitorowania obszaru osi i
ustawić z uwzględnienie programowania.
Opcja: Sprawdzić zewnętrzne zasilanie energią i ustawić z
uwzględnienie programowania.
Informacje
Szczegółowe informacje na ten
temat znajdują się w
dokumentacjach ograniczników
zakresu osi.
Szczegółowe informacje na ten
temat znajdują się w
dokumentacjach układów
monitorowania obszaru osi.
Szczegółowe informacje na ten
temat znajdują się w
dokumentacjach zewnętrznych
zasilań energią.
Opcja Robot pozycjonowany dokładnie: Sprawdzić dane.
84 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
6. Pierwsze i ponowne uruchamianie
6.2
Ustawianie sterownika robota.
Sposób
postępowania
1. Ustawić sterownik robota. Należy zachować minimalne odstępy od ścian,
innych szaf itp. (>>> 4.3 "Warunki ustawienia" strona 56)
2. Sprawdzić, czy sterownik robota nie został uszkodzony w czasie
transportu.
3. Sprawdzić, czy bezpieczniki, styczniki i płytki są dobrze zamocowane.
4. Zamocować poluzowane podzespoły.
5. Sprawdzić, czy wszystkie przyłącza śrubowe i zaciskowe są dobrze
zamocowane.
6. Użytkownik musi nakleić naklejkę ostrzegawczą Zobacz w podręczniku
w obowiązującym w danym kraju języku.
6.3
Podłączania przewodów łączących
Opis
Do robota jest dołączony zestaw kabli. Wersja podstawowa zawiera:
Przewody silnika do robota
Przewody sterujące do robota
Dodatkowo mogą być dołączone następujące przewody, służące do
innych celów:
Przewody silników osi dodatkowych
Przewody urządzeń peryferyjnych
Niebezpieczeństwo!
Układ sterowania robota jest zaprogramowany na pracę określonego układu
robota. W przypadku pomyłkowego podłączenia kabli, robot i osie
dodatkowe (opcja) mogą otrzymać błędne dane i doprowadzić przez to do
obrażeń operatora lub szkód materialnych. Jeśli instalacja składa się z kilku
robotów, każdego robota należy połączyć z przynależnym układem
sterowania.
Warunki wstępne
Sposób
postępowania
Spełnione warunki przyłączeniowe dotyczące:
przekroju przewodów
zabezpieczenia
napięcia
częstotliwości sieciowej
Spełnienie warunków bezpieczeństwa
1. Przewody silnika i przewód transmisji danych do skrzynki przyłączy robota
położyć oddzielnie. Podłączyć wtyk X20.
2. Przewody silnika i przewód transmisji danych do skrzynki przyłączy robota
położyć oddzielnie. Podłączyć wtyk X21.
3. Podłączyć przewody urządzeń peryferyjnych.
Rys. 6-1: Przykład: Ułożenie kabli w kanale kablowym
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
85 / 101
VKR C2 edition2005
1
2
3
6.4
4
5
Przewody silników
Przewody sterujące
Podłączenie VKCP
Sposób
postępowania
6.5
Kanał kablowy
Mostki
Przewody spawalnicze
Panel VKCP podłączyć do złącza X19 w sterowniku silnika.
Podłączenie wyrównania potencjałów PE
Sposób
postępowania
1. Dodatkowy przewód wyrównania potencjałów PE przyłączyć między
szyną centralną PE szafy zasilania a bolcami PE układu sterowania
robota.
2. Przyłączyć przewód o średnicy 16 mm2 służący jako wyrównanie
potencjałów między robotem a sterownikiem robota.
(>>> 4.8 "Wyrównanie potencjałów PE" strona 75)
3. Należy przeprowadzić kontrolę przewodu uziemiającego zgodnie z DIN
EN 60204-1 w całym systemie robota.
6.6
Podłączyć sterownik silnika do sieci
Sposób
postępowania
6.7
Podłączyć układ sterowania robota do sieci za pośrednictwem złącza
XS1.
Usuwanie zabezpieczenia przed rozładowaniem akumulatora
Opis
Sterownik robota dostarczany jest z wyciągniętą wtyczką X7 przy KPS, aby
uniknąć rozładowania akumulatorów przed pierwszym uruchomieniem.
Sposób
postępowania
Włączyć wtyczkę X7 (1) przy KPS600.
Rys. 6-2: Usuwanie zabezpieczenia przed rozładowaniem akumulatora
86 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
6. Pierwsze i ponowne uruchamianie
6.8
Podłączanie obwodu ZATRZYMANIA AWARYJNEGO i zabezpieczenia
Sposób
postępowania
6.9
1. Obwód ZATRZYMANIA AWARYJNEGO i zabezpieczenie (ochrona
operatora) podłączyć do portu XS2. (>>> 4.6 "Podłączanie obwodu
ZATRZYMANIA AWARYJNEGO i zabezpieczenia" strona 60)
Konfiguracja i podłączenie wtyków XS2/XS3/XS5 (Audi)
Sposób
postępowania
1. Wtyki XS2/XS3/XS5 (Audi) skonigurować według planu instalacji i
zabezpieczenia.
2. Podłączyć wtyki XS2, XS3 i XS5 (Audi) do układu sterowania robota.
6.10
Włączanie układu sterowania robota
Wymagania
Sposób
postępowania
Zamknięte drzwi szafy sterowniczej.
Wszystkie połączenia elektryczne są prawidłowe, poziom energii mieści
się w wyznaczonych granicach.
Urządzenia peryferyjne zostały prawidłowo podłączone.
W strefie zagrożenia robota nie mogą znajdować się ludzie i przedmioty.
Wszystkie urządzenia zabezpieczające i środki bezpieczeństwa są
kompletne i sprawne technicznie.
Temperatura wewnątrz szafy musi wyrównać się z temperaturą otoczenia.
1. Włączyć napięcie sieciowe sterownika silnika.
2. Odblokować przycisk ZATRZYMANIA AWARYJNEGO na panelu VKCP.
3. Włączyć główny przełącznik. Komputer PC układu sterowania zaczyna
podnosić system operacyjny i oprogramowanie sterujące.
Informacje dotyczące obsługi robota przez VKCP znajdują się w instrukcji
obsługi i programowania KUKA System Software (KSS).
6.11
Sprawdzenie kierunku obrotu wentylatora zewnętrznego
Sposób
postępowania
Sprawdzić wylot powietrza (2) w ścianie tylnej sterownika silnika.
Rys. 6-3: Sprawdzenie kierunku obrotu wentylatora
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
87 / 101
VKR C2 edition2005
1 Wlot powietrza
88 / 101
2 Wylot powietrza
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
7. Serwis KUKA
7
Serwis KUKA
7.1
Pomoc techniczna
Wstęp
Dokumentacja firmy KUKA Roboter GmbH zawiera informacje na temat
eksploatacji i obsługi produktu oraz usuwania zakłóceń. W przypadku
dalszych pytań, lokalny oddział firmy jest do Państwa dyspozycji.
Usterki powodujące zatrzymanie produkcji należy zgłosić w ciągu jednej
godziny do lokalnego oddziału firmy.
Informacje
7.2
Do opracowania pytania serwisowego są potrzebne następujące informacje:
Typ i numer seryjny robota
Typ i numer seryjny układu sterowania
Typ i numer seryjny jednostki liniowej (opcja)
Wersja oprogramowania systemowego KUKA
Dodatkowe oprogramowanie lub modyfikacje
Archiwum oprogramowania
Dostępne aplikacje
Dostępne osie dodatkowe (opcja)
Opis problemu, czas, częstotliwość występowania usterki
Biuro obsługi klienta KUKA
Dostępność
Biuro obsługi klienta KUKA jest dostępne w wielu krajach. Jesteśmy do
Państwa dyspozycji!
Argentyna
Ruben Costantini S.A. (Agentur)
Luis Angel Huergo 13 20
Parque Industrial
2400 San Francisco (CBA)
Argentyna
Tel. +54 3564 421033
Fax +54 3564 428877
[email protected]
Australia
Marand Precision Engineering Pty. Ltd. (Agentur)
153 Keys Road
Moorabbin
Victoria 31 89
Australia
Tel. +61 3 8552-0600
Fax +61 3 8552-0605
[email protected]
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
89 / 101
VKR C2 edition2005
90 / 101
Belgia
KUKA Automatisering + Robots N.V.
Centrum Zuid 1031
3530 Houthalen
Belgia
Tel. +32 11 516160
Fax +32 11 526794
[email protected]
www.kuka.be
Brazylia
KUKA Roboter do Brasil Ltda.
Avenida Franz Liszt, 80
Parque Novo Mundo
Jd. Guançă
CEP 02151 900 Săo Paulo
SP Brazylia
Tel. +55 11 69844900
Fax +55 11 62017883
[email protected]
Chile
Robotec S.A. (Agency)
Santiago de Chile
Chile
Tel. +56 2 331-5951
Fax +56 2 331-5952
[email protected]
www.robotec.cl
Chiny
KUKA Flexible Manufacturing Equipment (Shanghai) Co., Ltd.
Shanghai Qingpu Industrial Zone
No. 502 Tianying Rd.
201712 Shanghai
P.R. China
Tel. +86 21 5922-8652
Fax +86 21 5922-8538
[email protected]
www.kuka.cn
Niemcy
KUKA Roboter GmbH
Zugspitzstr. 140
86165 Augsburg
Niemcy
Tel. +49 821 797-4000
Fax +49 821 797-1616
[email protected]
www.kuka-roboter.de
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
7. Serwis KUKA
Francja
KUKA Automatisme + Robotique SAS
Techvallée
6, Avenue du Parc
91140 Villebon S/Yvette
Francja
Tel. +33 1 6931660-0
Fax +33 1 6931660-1
[email protected]
www.kuka.fr
Indie
KUKA Robotics, Private Limited
621 Galleria Towers
DLF Phase IV
122 002 Gurgaon
Haryana
Indie
Tel. +91 124 4148574
[email protected]
www.kuka.in
Włochy
KUKA Roboter Italia S.p.A.
Via Pavia 9/a - int.6
10098 Rivoli (TO)
Włochy
Tel. +39 011 959-5013
Fax +39 011 959-5141
[email protected]
www.kuka.it
Japonia
KUKA Robotics Japan K.K.
Daiba Garden City Building 1F
2-3-5 Daiba, Minato-ku
Tokyo
135-0091
Japonia
Tel. +81 3 6380-7311
Fax +81 3 6380-7312
[email protected]
Korea
KUKA Robot Automation Korea, Co. Ltd.
4 Ba 806 Sihwa Ind. Complex
Sung-Gok Dong, Ansan City
Kyunggi Do
425-110
Korea
Tel. +82 31 496-9937 or -9938
Fax +82 31 496-9939
[email protected]
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
91 / 101
VKR C2 edition2005
92 / 101
Malezja
KUKA Robot Automation Sdn Bhd
South East Asia Regional Office
No. 24, Jalan TPP 1/10
Taman Industri Puchong
47100 Puchong
Selangor
Malezja
Tel. +60 3 8061-0613 or -0614
Fax +60 3 8061-7386
[email protected]
Maksyk
KUKA de Mexico S. de R.L. de C.V.
Rio San Joaquin #339, Local 5
Colonia Pensil Sur
C.P. 11490 Mexico D.F.
Maksyk
Tel. +52 55 5203-8407
Fax +52 55 5203-8148
[email protected]
Norwegia
KUKA Sveiseanlegg + Roboter
Bryggeveien 9
2821 Gjövik
Norwegia
Tel. +47 61 133422
Fax +47 61 186200
[email protected]
Austria
KUKA Roboter Austria GmbH
Regensburger Strasse 9/1
4020 Linz
Austria
Tel. +43 732 784752
Fax +43 732 793880
[email protected]
www.kuka-roboter.at
Polska
KUKA Roboter Austria GmbH
Spółka z ograniczoną odpowiedzialnością
Oddział w Polsce
Ul. Porcelanowa 10
40-246 Katowice
Polska
Tel. +48 327 30 32 13 or -14
Fax +48 327 30 32 26
[email protected]
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
7. Serwis KUKA
Portugalia
KUKA Sistemas de Automatización S.A.
Rua do Alto da Guerra n° 50
Armazém 04
2910 011 Setúbal
Portugalia
Tel. +351 265 729780
Fax +351 265 729782
[email protected]
Rosja
OOO KUKA Robotics Rus
Webnaja ul. 8A
107143 Moskau
Rosja
Tel. +7 495 781-31-20
Fax +7 495 781-31-19
kuka-robotics.ru
Szwecja
KUKA Svetsanläggningar + Robotar AB
A. Odhners gata 15
421 30 Västra Frölunda
Szwecja
Tel. +46 31 7266-200
Fax +46 31 7266-201
[email protected]
Szwajcaria
KUKA Roboter Schweiz AG
Riedstr. 7
8953 Dietikon
Szwajcaria
Tel. +41 44 74490-90
Fax +41 44 74490-91
[email protected]
www.kuka-roboter.ch
Hiszpania
KUKA Sistemas de Automatización S.A.
Pol. Industrial
Torrent de la Pastera
Carrer del Bages s/n
08800 Vilanova i la Geltrú (Barcelona)
Hiszpania
Tel. +34 93 814-2353
Fax +34 93 814-2950
[email protected]
www.kuka-e.com
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
93 / 101
VKR C2 edition2005
Republika
Jendamark Automation LTD (Agency)
Południowej Afryki 76a York Road
North End
6000 Port Elizabeth
Republika Południowej Afryki
Tel. +27 41 391 4700
Fax +27 41 373 3869
www.jendamark.co.za
94 / 101
Tajwan
KUKA Robot Automation Taiwan Co., Ltd.
136, Section 2, Huanjung E. Road
Jungli City, Taoyuan
Taiwan 320
Tel. +886 3 4371902
Fax +886 3 2830023
[email protected]
www.kuka.com.tw
Tajlandia
KUKA Robot Automation (M)Sdn Bhd
Thailand Office
c/o Maccall System Co. Ltd.
49/9-10 Soi Kingkaew 30 Kingkaew Road
Tt. Rachatheva, A. Bangpli
Samutprakarn
10540 Thailand
Tel. +66 2 7502737
Fax +66 2 6612355
[email protected]
www.kuka-roboter.de
Czechy
KUKA Roboter Austria GmbH
Organisation Tschechien und Slowakei
Sezemická 2757/2
193 00 Praha
Horní Počernice
Czechy
Tel. +420 22 62 12 27 2
Fax +420 22 62 12 27 0
[email protected]
Węgry
KUKA Robotics Hungaria Kft.
Fö út 140
2335 Taksony
Węgry
Tel. +36 24 501609
Fax +36 24 477031
[email protected]
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
7. Serwis KUKA
USA
KUKA Robotics Corp.
22500 Key Drive
Clinton Township
48036 Michigan
USA
Tel. +1 866 8735852
Fax +1 586 5692087
[email protected]
www.kukarobotics.com
Wielka Brytania
KUKA Automation + Robotics
Hereward Rise
Halesowen
B62 8AN
Wielka Brytania
Tel. +44 121 585-0800
Fax +44 121 585-0900
[email protected]
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
95 / 101
VKR C2 edition2005
96 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
Index
Index
Cyfry
2004/108/WE 53
2006/42/WE 53
89/336/WE 53
95/16/WE 53
97/23/WE 53
A
Akcesoria 7, 29
AUT EXT 36
Automatyka zewnętrzna 36
Awaria 39
B
Bezpieczeństwo 29
Bezpieczeństwo sieci 49
Bezpieczeństwo, informacje ogólne 29
Bezpiecznik automatyczny FI, różnica prądu
wyłączającego 23, 58
Biuro obsługi klienta KUKA 89
Blok klawiszy numerycznych 11
Blokada zabezpieczeń oddzielających 37
Błędne hamowanie 44
C
CEE XS1 59
COM 1, szeregowe interfejs 10
COM 2, szeregowe interfejs 10
Czynności pielęgnacyjne 51
Czyszczenie 51
D
Dane maszynowe 48
Dane podstawowe 23
Dane techniczne 23
Deklaracja montażu 29, 30
Deklaracja zgodności 30
Deklaracja zgodności z normami WE 30
Długości przewodów 25, 59
Droga hamowania 31
Droga reakcji 31
Droga zatrzymania 31, 34
dwukanałowy 12
Dyrektywa "Kompatybilność
elektromagnetycznaÓ 53
Dyrektywa "MaszynyÓ 53
Dyrektywa "Urządzenia ciśnieniowe" 53
Dyrektywa EMC 30
Dyrektywa maszynowa 30
Dyrektywa niskonapięciowa 30
Dyrektywa w sprawie urządzeń ciśnieniowych 51
Działania ochronne 44
E
Elementy zabezpieczające 15
EN 60204-1 54
EN 61000-6-2 54
EN 61000-6-4 54
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
EN 614-1 54
EN ISO 10218-1 53
EN ISO 12100-1 53
EN ISO 12100-2 53
EN ISO 13849-1 53
EN ISO 13849-2 53
EN ISO 13850 53
ESC 35
Ethernet 10
F
Filtr sieciowy 15
Firewall 49
I
Informacja o zakresie odpowiedzialności
cywilnej 29
Integrator instalacji 31
Integrator systemów 30, 31, 32
Interfejs Audi 67
Interfejs Audi XS2 z kartą CI3-Tech 70
Interfejs Audi XS5 z kartą CI3-Tech 74
Interfejs Audi, XS3 72
Interfejs Audi, XS5 73
Interfejs audio, XS2 68
Interfejs VW 61
Interfejs VW XS2 z kartą CI3-Tech 64
Interfejs VW, XS2 62
Interfejs VW, XS3 66
Interfejsy komputera sterującego 9
Interfejsy VW i Audi 61
J
Jednostka liniowa 29
K
Kategoria zatrzymania 31
KCP 31, 45
Klawiatura 11
Klawiatura, zewnętrzna 45
Klawisz Enter 11
Klawisz ESC 11
Klawisz Start 11, 12
Klawisz Start-Wstecz 11
Klawisz STOP 11
Klawisze kierunkowe 11
Kompatybilność elektromagnetyczna, EMC 55
Komputer sterujący 7, 8, 25
Konfiguracja i podłączenie XS2/XS3/XS5 87
Konserwacja 50
Kontrola poprawności działania 48
Krzyż transportowy 79
KUKA Control Panel 11, 25
L
Logiczny układ bezpieczeństwa, Electronic
Safety Circuit , ESC 12
Lokalne ZATRZYMANIE AWARYJNE 13
97 / 101
VKR C2 edition2005
LPT1, równoległy interfejs 10
Ł
Łącznik KCP 42
Łącznik KCP, wizualizacja 76
M
Manipulator 7, 29, 31, 34
Mechaniczne ograniczniki krańcowe 41
Mechaniczny ogranicznik zakresu osi 41
Mechanizm swobodnego obrotu 42
Minimalne odległości, szafa nadstawiana i
technologiczna 27
Minimalne odstępy układu sterowania robota 26
Mocowanie do podłogi 27
Moduł zasilający 7, 14
Mysz, zewnętrzna 45
N
Napędy WŁ. 11, 13, 36
Napędy WYŁ 11
Napędy WYŁ. 13, 36
Naprawa 50
Nastawnik 29
O
Obszar ochronny 31, 34
Obszar roboczy 31, 33, 34
Obszar zagrożenia 31
Obwód ZATRZYMANIA AWARYJNEGO 60
Ochrona antywirusowa 49
Ochrona operatora 37
Ochrona użytkownika 13, 35, 44
Ogólne środki bezpieczeństwa 44
Ogranicznik zakresu osi 41
Opcje 7, 29
Opis produktu 7
Oprogramowanie 7, 29
Osie dodatkowe 29, 31
Oznaczenia 43
Oznaczenie CE 30
P
Panel przyłączeniowy 7
Personel 31
Peryferia węzłów 13
Pierwsze uruchamiania 46, 83
PL 76
Plan, przegląd 55
Płyty CI3 14
Podłączanie obwodu ZATRZYMANIA
AWARYJNEGO 87
Podłączenie sieci 86
Podłączenie VKCP 86
Podłączenie wyrównania potencjałów PE 86
Podłączenie zabezpieczenia 87
Pojęcia, bezpieczeństwo 31
Pomoc techniczna 89
Ponowne uruchamianie 46, 83
Poziom zapewnienia bezpieczeństwa 35, 76
Pozycja transportowa 46
98 / 101
Praca ręczna 49
Programator 7, 29
Programator KCP 7
Przeciążenie 44
Przeciwwaga 51
Przegląd planu 55
Przegląd robota przemysłowego 7
Przełącznik główny 15
Przełącznik trybów roboczych 11, 36
Przewody łączące 7, 29, 85
Przewody silnika 15
Przewody sterujące 15
Przewód sieciowy 15
Przewód transmisji danych, X21 21
Przewód VKCP 15
Przycisk akceptacji 12, 35, 39, 40
Przycisk akceptacji, zewnętrzny 40
Przycisk stanu 11
Przycisk wyboru okna 11
Przycisk ZATRZYMANIA AWARYJNEGO 35,
38, 48
Przycisk ZATRZYMANIA AWARYJNYEGO 39
Przycisk zatwierdzający 13, 44
Przyciski menu 11
Przyciski programowalne 11
Przyłącze sieciowe za pośrednictwem XS1 59
Przyłącze sieciowe, dane techniczne 23, 58
Przyłącze sieciowe, XS1 16
Przyporządkowanie styków PCI 10
R
Reakcje powodujące zatrzymanie 34
Robot przemysłowy 7, 29
Rozkład styków XS2, Audi 68, 70
Rozkład styków XS2, VW 62, 64
Rozkład styków XS3, Audi 72
Rozkład styków XS3, VW 66
Rozkład styków XS5, Audi 73, 74
S
Serwis, KUKA Roboter 89
Serwoprzetwornica (KSD) 15
Single Point of Control 52
Składowanie 52
SpaceMouse 11
Sprawdzenie kierunku obrotu wentylatora
zewnętrznego 87
SSB-GUI 11
Sterowanie hamulcami 23
Sterownik 24
STOP 0 31, 34
STOP 1 31, 34
STOP 2 31, 34
Stosowane normy i przepisy 53
Stół obrotowo-przechylny 29
Strefa bezpieczeństwa 33
Substancje niebezpieczne 51
Symulacja 50
System sterowania robota 7
Szeregowy interfejs czasu rzeczywistego 10
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
Index
T
T1 31
T2 31
Tabliczka znamionowa 12
Transport 46, 79
Transport, uprząż transportowa 79
Transport, wózek widłowy 80
Transport, wózki kołowe 81
Tryb automatyczny 50
Tryb impulsowy 40, 44
Tryby pracy 13, 36
U
Układ bezpieczeństwa 7, 35
Układ monitorowania zakresu osi 42
Układ sterowania robota 7, 29, 49
Układ sterowania robota Đ zestawienie 7
Uniwersalny 23, 58
Uruchamianie, zestawienie 83
Urządzenia ochronne, zewnętrzne 43
Urządzenie ZATRZYMANIA AWARYJNEGO 39
Urządzenie ZATRZYMANIA AWARYJNYEGO
38, 44
Ustawianie sterownika robota. 85
Usterki 45
Usuwanie 52
Usuwanie zabezpieczenia przed rozładowaniem
akumulatora 86
Użytkowanie zgodne z przeznaczeniem 29
Użytkowanie, niezgodne z przeznaczeniem 29
Użytkownik 31, 32
X21 Funkcje styków wtyczek 21
Z
Zabezpieczenie 60
Zakres osi 31
Zasięg skrzydeł drzwi szafy 28
Zasilacze 14
ZATRZYMANIE AWARYJNE 11, 34
ZATRZYMANIE AWARYJNE, miejscowe 35, 48
ZATRZYMANIE AWARYJNE, zewnętrzne 39
ZATRZYMANIE AWARYJNYE, zewnętrzne 35,
48
Zestawienie Uruchamianie 83
Zewnętrzne ZATRZYMANIE AWARYJNE 13
Złącza 15
Zwarcia poprzeczne 47
Ż
Żywotność, bezpieczeństwo 45
Żywotność, zaciski magistrali Safetybus 46
V
VKCP 31
W
Wartości PFH 76
Warunki klimatyczne 24
Warunki przyłączenia 58
Warunki ustawienia 56
Wejścia, kwalifikujące 35, 36, 48
Wentylator 15
Wirtualne łączniki krańcowe 41, 44
Włączanie układu sterowania robota 87
Wtyczka silnika X7 20
Wtyczka silnika, X20 19
Wtyczka silnika, X7 20
Wtyczka VKCP, X19 18
Wycofanie z eksploatacji 52
Wyjście testowe A 63, 65, 68, 70, 73, 74
Wyjście testowe B 63, 65, 68, 70, 73, 74
Wykresy sygnałów 61, 67
Wymiary otworów 27
Wymiary układu sterowania robota 25
Wyposażenie ochronne 40
Wyrównanie potencjałów PE 75
Wytrzymałość na wstrząsy 24
X
X19 Funkcje styków wtyczek 18
X20 Funkcje styków wtyczek 19
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
99 / 101
VKR C2 edition2005
100 / 101
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
VKR C2 edition2005
Stan: 26.07.2010 Wersja: Spez VKR C2 ed05 V2 pl
101 / 101