Laboratorium
Nowoczesna Diagnostyka Materiałowa
Pomiar materiałów magnetycznie miękkich
I. Zagadnienia do przygotowania:
1. Podstawowe wielkości opisujące pole i materiały
magnetyczne: natężenie pola magnetycznego, indukcja
magnetyczna,
magnetyzacja,
strumień
pola
magnetycznego, podatność magnetyczna, przenikalność
magnetyczna względna i bezwzględna, natężenie pola
koercji, remanencja magnetyczna.
2. Para-, dia- i ferromagnetyki: budowa atomowa i reakcja
na zewnętrzne pole magnetycznie.
3. Domeny magnetyczne.
4. Jak rozmagnesować ferromagnetyk?
5. Pętla histerezy i krzywa magnesowania ferromagnetyka.
6. Układ do pomiaru pętli histerezy stosowany
w ćwiczeniu. Jak wyznaczysz B i H?
II. Program ćwiczenia:
1. Dobór warunków pomiaru i wyznaczenie pętli histerezy
magnetyka.
2. Pomiar krzywej pierwotnej magnesowania.
3. Wyznaczenie podstawowych parametrów materiału.
III. Literatura:
1. Materiały z wykładu
2. Halliday, Resnick – Podstawy Fizyki, PWN
3. FERROXCUBE, Soft ferrites and Accessories
http://www.ferroxcube.com/
4. VAC®, http://www.vacuumschmelze.com
5. M. Soiński, Materiały magnetyczne w technice, Wyd.
SEP 2001
W czasie wykonywania ćwiczeń przestrzegaj przepisów BHP!
Wydział Elektroniki Mikrosystemów i Fotoniki
1
1.
Wstęp
1.1. Cel ćwiczenia
W ćwiczeniu przedstawiona jest prosta metoda pomiaru parametrów materiałów
magnetycznie miękkich. Część praktyczna ćwiczenia obejmuje wyznaczenie odpowiedzi
ferromagnetyka na pobudzenie zmiennym polem magnetycznym oraz obliczeniu na jej
podstawie parametrów badanego elementu.
1.2. Ferromagnetyki
Ferromagnetyki należą do grupy materiałów magnetycznych. W materiałach tych
występują domeny magnetyczne, w których momenty magnetyczne sąsiadujących atomów
spontanicznie ustawiają się w tym samym kierunku.
Na uporządkowanie kierunków namagnesowania domen można wpływać
zewnętrznym polem magnetycznym. Jeśli na początku takiego uporządkowania brak, to
materiał nie wykazuje wypadkowego namagnesowania i dla natężenia pola magnetycznego
𝐻 = 0 całkowita indukcja magnetyczna B:
𝐵 = 𝜇0 (𝐻 + 𝑀) = 𝜇0 𝐻 + 𝜇0 𝜒𝑚 𝐻
(1)
, gdzie 𝑀 – magnetyzacja, 𝜇0 – przenikalność magnetyczna próżni, 𝜒𝑚 – podatność
magnetyczna, też jest równa 0.
Wraz ze wzrostem natężenia zewnętrznego pola magnetycznego następuje
stopniowe porządkowanie domen w kierunku zgodnym z kierunkiem zewnętrznego pola
magnetycznego, co powoduje znaczny wzrost magnetyzacji. Podatność magnetyczna
ferromagnetyków jest zazwyczaj bardzo duża, 1000, 10 000 lub więcej, przez co
w równaniu (1) dominuje ostatni czynnik, związany z materiałem.
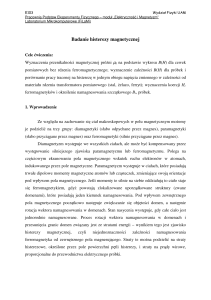
Po osiągnięciu maksymalnego uporządkowania dalszy wzrost indukcji
magnetycznej jest zahamowany, a jej maksymalną wartość nazywamy indukcją nasycenia
𝐵𝑆 . Zależność indukcji od natężenia pola magnetycznego jest zatem nieliniowa. Jej wykres
dla materiału wstępnie rozmagnesowanego nazywamy krzywą pierwotną magnesowania.
Jej przykładowy przebieg pokazano na rysunku 1.
B
BS
BR
-HC
HC
-BR
-BS
H
pętla histerezy
krzywa
Rysunek 1. Przykładowa pętla histerezy oraz krzywa pierwotna magnesowania ferromagnetyka.
Po obniżeniu zewnętrznego pola magnetycznego do zera uporządkowanie domen
ferromagnetycznych pozostaje. Skutkuje to występowaniem pewnej indukcji magnetycznej
przy powierzchni materiału, nazywaną remanencją bądź pozostałością magnetyczną 𝐵𝑅 .
2
Jeśli chcielibyśmy obniżyć indukcję magnetyczną tak namagnesowanego materiału do
zera, trzeba zadziałać zewnętrznym polem magnetycznym o natężeniu 𝐻𝐶 (natężenie pola
koercji, natężenie powściągające).
Materiał posiadający takie właściwości będzie nieliniowo reagował na zmiany
natężenia zewnętrznego pola magnetycznego, a zależność 𝐵 = 𝑓(𝐻) będzie wykazywała
histerezę. Jej przykładowy przebieg pokazano na rysunku 1.
Ma ona taki kształt tylko w wypadku zmian zewnętrznego pola magnetycznego na
tyle silnych, by przy przemagnesowaniu materiału doszło w nim do nasycenia. Jeśli tak nie
jest, oka histerezy są węższe, zależność 𝐵 = 𝑓(𝐻) jest bardziej liniowa, a wierzchołki
wykresów tej zależności dość dokładnie odwzorowują przebieg krzywej pierwotnej
magnesowania. Fakt ten wykorzystany jest w ćwiczeniu.
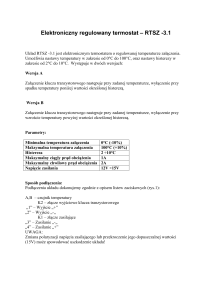
1.3. Układ pomiarowy
Schemat układu do pomiaru pętli histerezy przedstawiono na rysunku 2:
Rysunek 2. Uproszczony schemat stanowiska pomiarowego.
Na rdzeniu toroidalnym, wykonanym z badanego materiału magnetycznego,
nawinięte są dwa uzwojenia. Układ pomiarowy wyposażony jest w podstawkę
umożliwiającą szybką wymianę badanego rdzenia.
Uzwojenie pierwotne służy do wzbudzania pola magnetycznego w rdzeniu
i połączone jest z generatorem przebiegu okresowego i wzmacniaczem. Szeregowo
podłączony jest również rezystor pomiarowy Rwe. Napięcie Uwe na tym rezystorze
proporcjonalne jest do natężenia prądu w uzwojeniu pierwotnym czyli do natężenia pola
magnetycznego w rdzeniu.
H=
N we ⋅ U we
Rwe ⋅ le
A
m
(2)
gdzie: Nwe – liczba zwojów uzwojenia pierwotnego, le – efektywna długość drogi
strumienia magnetycznego, Uwe – napięcie na rezystorze Rwe.
Indukcja magnetyczna w rdzeniu mierzona jest za pomocą uzwojenia wtórnego.
Całka z napięcia (Uwy) na tym uzwojeniu proporcjonalna jest do indukcji magnetycznej wg
zależności:
1
(3)
B=
U wy (t )dt [T ]
N wy ⋅ Ae ∫
3
gdzie: Nwy – liczba zwojów uzwojenia wtórnego, Ae – efektywne pole przekroju
poprzecznego rdzenia, Uwy – napięcie na uzwojeniu wtórnym.
Stanowisko pomiarowe zawiera analogowy układ całkujący RC. Pozwala to na
uzyskanie i pomiar napięcia wprost proporcjonalnego do indukcji magnetycznej:
U wy ⋅ t wy U wy ⋅ Rwy ⋅ Cwy
1
=
=
B=
U
(
t
)
dt
[T ]
(4)
wy
N wy ⋅ Ae ∫
N wy ⋅ Ae
N wy ⋅ Ae
gdzie: Rwy – rezystancja układu całkującego, Cwy – pojemność układu całkującego.
2. Przebieg ćwiczenia
2.1. Informacje wstępne
Prowadzący zajęcia daje do pomiarów jeden z rdzeni magnetycznych
z nawiniętymi
uzwojeniami
oraz
określa
częstotliwość
pomiarową
fpom,
500 Hz ≤ fpom ≤ 2 kHz
2.2. Obliczenie wartości elementów układu całkującego
Należy dobrać wartość kondensatora Cwy w układzie całkującym. Wartość rezystora
Rwy jest stała, zaznaczono ją na schemacie. C należy dobrać spośród dostępnych wartości
wy
tak, aby stała czasowa układu całkującego nie była mniejsza od okresu sygnału
pomiarowego.
1
Rwy Cwy ≥
(5)
f pom
2.3. Obliczenie współczynników skalowania
Równania 2 i 4 wskazują sposób przeliczania mierzonych napięć. Bazując na
obliczonych bądź odczytanych ze schematu wartościach rezystancji i pojemności,
pomiarach wymiarów rdzenia i zliczeniu zwojów obu uzwojeń należy wyliczyć wartości:
N A
(6)
k H = we
Rwele m V
kB =
Rwy Cwy T
N wy Ae V
Współczynniki te posłużą do przeliczania mierzonych napięć na H i B.
H = k HU we
B = k BU wy
(7)
(8)
2.4. Zestawienie układu pomiarowego
Generator należy połączyć z płytką zestawu do pomiaru pętli histerezy przewodem
koncentrycznym. Wyjście H połączyć należy z wejściem kanału pierwszego oscyloskopu.
Na wyjściu tym wyprowadzane jest napięcie Uwe.
Drugi kanał oscyloskopu należy połączyć z wyjściem B układu pomiarowego. Na
wyjściu tym wyprowadzane jest napięcie Uwy.
Ustalić kształt generowanego przebiegu na sinusoidalny o amplitudzie rzędu
kilkuset miliwoltów i zadanej częstotliwości. Oscyloskop przełączyć w tryb pracy XY
(menu pod klawiszem Main/Delayed). Na ekranie oscyloskopu powinna być widoczna
pętla histerezy.
4
2.5. Wyznaczenie pętli histerezy
Pętlę histerezy uzyskuje się pobierając automatycznie dane z oscyloskopu na
którym prezentowana jest pętla histerezy rdzenia magnetycznego pracującego
w nasyceniu.
a) Należy ustalić amplitudę sygnału z generatora na wartość, przy której na pętli
histerezy obserwowanej na oscyloskopie będzie wyraźnie widoczne nasycanie się
rdzenia. Wartość Amax należy zapisać.
b) Jeżeli pętla histerezy nie jest symetryczna skorygować symetrię regulując wartością
VDC w generatorze. Uwaga, zwykle wystarczy zmiana o kilka mV.
c) Uruchomić program do akwizycji danych Magnetyki, pobrać dane z oscyloskopu,
zapisać je. Akwizycja danych powoduje przełączenie oscyloskopu w tryb pracy
zdalnej. Po skończonej akwizycji danych przełączyć oscyloskop w tryb pracy
autonomicznej klawiszem LOCAL.
d) Pobrane dane należy zaimportować do nowego arkusza w projekcie Origin.
Dokonać przeliczeń Uwe→H i Uwy→B. Sporządzić wykres pętli histerezy,
wyznaczyć indukcję nasycenia, remanencję magnetyczną i natężenie pola koercji.
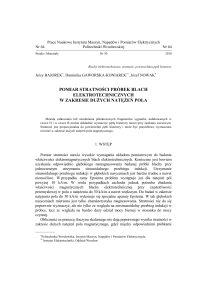
2.6. Wyznaczanie krzywej pierwotnej magnesowania
Rysunek 2. Krzywa pierwotna magnesowania i zależność przenikalności magnetycznej w funkcji natężenia
pola magnetycznego.
Krzywa pierwotna magnesowania wyznaczana jest przez punkty maksymalnej
indukcji i natężenia pola pętli histerezy mierzonych przy różnych napięciach sygnału
z generatora. Wiadomo również, że przechodzi ona przez punkt B=0, H=0.
a) Ustawić minimalną amplitudę sygnału z generatora (10 mV), oscyloskop
przełączyć w tryb XY. Upewnić się, że oba kanały pracują w trybie sprzężenia
stałoprądowego.
b) W razie występowania asymetrii w obserwowanym przebiegu skorygować
położenie obserwowanej krzywej dodając składową stałą do generowanego
przebiegu.
c) Przełączyć oscyloskop w tryb YT, uzyskać stabilny obraz (Auto Scale)
d) Korzystając z funkcji automatycznego pomiaru napięć zmierzyć Vmax obu kanałów
przy amplitudach sygnału z generatora ustawianych w zakresie 10 mV≤A≤Amax.
Wartości te należy wpisać do nowego arkusza w projekcie Origin.
5
e) Przeliczyć wartości Uwe i Uwy na wartości B i H,
f) Wykreślić krzywą pierwotną magnesowania na osobnym wykresie jak również
wpisać ją we wcześniej wyznaczoną pętlę histerezy
2.7. Wyznaczanie wartości μmax oraz μi
Wartości µmax oraz µi należy wyznaczyć z krzywej pierwotnej magnesowania
poprzez jej zróżniczkowanie i odpowiednie przeliczenia.
2.8. Wyznaczanie stałej indukcyjności rdzenia
Z zależności umieszczonej poniżej wyznaczyć AL,
µ
AL = e ⋅ µ0
l
∑A
(9)
µe – przenikalność efektywna (dla rdzenia bez szczeliny powietrznej równa jest µi).
Występująca w powyższym wyrażeniu suma jest sumą stosunków długości do przekroju
wszystkich obwodów magnetycznych rdzenia. Rdzenie toroidalne mają jeden obwód
magnetyczny.
2.9. Wyznaczanie energii magnesowania, rozmagnesowania oraz energii traconej
przy przemagnesowaniu
Energie należy wyznaczyć wykorzystując właściwości całki będącej polem
powierzchni pod krzywą.
Bn
J
W = ∫ H dB 3
m
0
(10)
Rysunek 3: Wyznaczanie energii: a) magnesowania, b) rozmagnesowania i c) przemagnesowania.
Uwaga: Wyznaczenie energii przemagnesowania jest możliwe wyłącznie
w przypadku zgodności przebiegu pętli histerezy z krzywą pierwotną magnesowania.
6