Profilometr laserowy
Ćwiczenie nr 8
1. Wstęp
Detekcja położenia wiązki laserowej jest jednym z najczęściej występujących zadań
podczas wykorzystywania lasera w automatyce i technice kontrolno - pomiarowej. Jednym z
lepszych czujników położenia wiązki laserowej jest fotodioda kwadrantowa.
2. Budowa fotodiody kwadrantowej
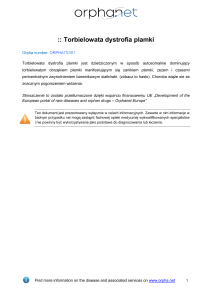
Powierzchnia światłoczuła fotodiody kwadrantowej składa się z czterech segmentów
(prostokątnych wycinków koła), oraz zewnętrznego pierścienia. Każdy z pięciu elementów
światłoczułych jest oddzielną fotodiodą o wspólnej anodzie. Czułość czterech segmentów jest
jednakowa natomiast czułość pierścienia ze względu na inny kształt i przeznaczenie jest nieco
inna. Fotodioda ma zamkniętą obudowę metalową, oraz siedem wyprowadzeń.
Tabela 1.
Opis końcówek fotodiody kwadrantowej
Końcówka
1
2
3
4
5
6
7
Elektroda
segment I
obudowa
segment IV
pierścień
segment III
anoda
segment II
P
II
I
III
IV
Rys. 1. Obszary światłoczułe fotodiody
kwadrantowej
3. Układ do rejestracji środka wiązki laserowej
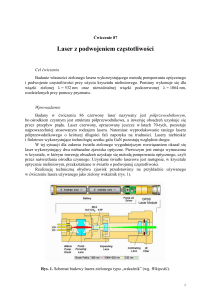
Rys. 2. Określanie współrzędnych xs i ys plamki laserowej
O - oś optyczna; Z - źródło promieniowania; P - obraz źródła;
F - powierzchnia fotodiody kwadrantowej
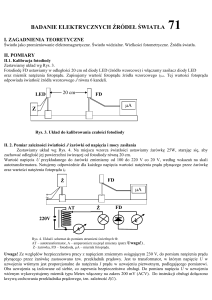
Analizowany model geometryczny fotodiody kwadrantowej i plamki świetlnej przedstawiono
na rys. 3., gdzie:
I, II, III, IV
P
Sk
- segmenty fotoczułe fotodiody kwadrantowej.
fotoczuły pierścień fotodiody
- oświetlona powierzchnia k-tego segmentu
Sp
RD
R
r
- oświetlona powierzchnia pierścienia
- promień fotodiody
- promień powierzchni pomiarowej
- promień plamki źródła promieniowania
xs, ys
x, y
2
b
- współrzędne prostokątne obrazu źródła promieniowania
- osie układu współrzędnych
- odstęp między powierzchniami fotoczułymi
- odległość środka plamki od środka fotodiody
- kąt zawarty między b a osią x
2
Rys. 3. Model geometryczny fotodiody i plamki świetlnej
Sygnały z poszczególnych elementów światłoczułych można opisać następującymi
zależnościami:
I k nk S k
gdzie: I k - prąd fotoelektryczny dowolnego elementu fotodiody
nk - współczynnik proporcjonalności k-tego elementu
S k - oświetlona powierzchnia elementu
Współczynnik nk zależy od czułości elementu, rozkładu i gęstości energetycznej plamki
nk f S k ' I ( x, y)
gdzie:
I ( x, y ) - dwuwymiarowy rozkład mocy w plamce
S k - czułość widmowa k-tego elementu
Dla idealnej fotodiody współczynniki segmentów są sobie równe (n1=n2=n3=n4). W
rzeczywistych warunkach istnieją niewielkie różnice między współczynnikami proporcjonalności poszczególnych segmentów. Współczynnik np pierścienia różni się od współczynnika
segmentów.
W związku z tym, że w dalszej obróbce sygnałów korzystniej jest posługiwać się
napięciami a nie prądami, należy przekształcić prądy fotoelektryczne w proporcjonalne do
nich napięcia.
3
W celu określenia położenia plamki laserowej na powierzchni fotodiody należy dokonać
operacji matematycznej na czterech sygnałach uzyskanych z fotoczułych segmentów.
Dokonuje się tego metodą sumaryczno - różnicową [1] [2] [3]. W metodzie tej współrzędne
określone są następującymi równaniami:
współrzędna x
U x (U 1 U 4 ) (U 2 U 4 )
współrzędna y
U y (U 1 U 2 ) (U 3 U 4 )
gdzie:
U1 , U2 , U3 , U4 - napięcia na wyjściach przetworników prąd - napięcie
poszczególnych segmentów
U x - napięcie proporcjonalne do przemieszczenia plamki wzdłuż osi x,
U y - napięcie proporcjonalne do przemieszczenia plamki wzdłuż osi y.
W metodzie sumaryczno - różnicowej jednoznaczność określenia wielkości Ux i Uy
występuje przy zachowaniu stałości mocy promieniowania padającego na fotodiodę. W
rzeczywistych warunkach pomiaru spełnienie powyższego jest trudne (zmienność warunków
atmosferycznych, niestabilność mocy lasera). Uniezależnienie się od wpływu zmian mocy na
wynik pomiaru można zrealizować poprzez dokonanie operacji dzielenia sygnałów Ux i Uy
przez sumę sygnałów wyjściowych U1 , U2 , U3 , U4 z poszczególnych segmentów fotodiody lub
poprzez wprowadzenie układu automatycznej regulacji wzmocnienia [2].
Suma sygnałów wyjściowych niesie także informację o mocy promieniowania optycznego padającego na powierzchnię pomiarową fotodiody. Dlatego w układzie obróbki sygnałów
warto wyodrębnić dodatkowy sygnał wyjściowy spełniający zależność:
U s U1 U2 U3 U4
Sygnał z pierścienia Up ułatwia lokalizację plamki i daje możliwość "zablokowania" plamki
na obszarze fotodiody.
4
II
I
III
IV
P
Układ obróbki sygnałów
I1
I2
I/U
I/U
U1
(U1 + U 4) - (U 2 +U 3)
Ux
I3
U2
U1 + U 2 + U 3+ U 4
I4
I/U
Ip
I/U
U3
U4
I/U
Up
(U 1 + U 2) - (U 3 + U 4)
Us
Uy
Up
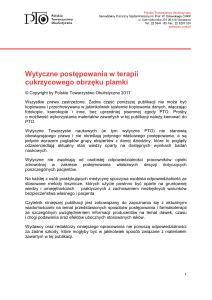
Rys. 4. Schemat blokowy układu do rejestracji środka wiązki laserowej
Na rysunku 4. przedstawiono schemat blokowy układu do rejestracji środka wiązki
laserowej o następujących sygnałach wyjściowych:
Ux - określenie współrzędnej x
Uy - określenie współrzędnej y
Us - moc światła podającego na segmenty fotoczułe
Up - sygnał pierścienia
W wyniku rozważań teoretycznych można określić optymalny stosunek średnicy plamki
2r do średnicy powierzchni pomiarowej 2R, który wynosi około 0,5.
5
4. Pomiary sygnałów wyjściowych układu do rejestracji środka wiązki
laserowej
a)
1
Ux
L
2
Uy
F
Z
Us
Up
3
4
UOS
b)
F
Rys. 5. Pomiar sygnałów wyjściowych układu do rejestracji środka wiązki laserowej:
a) schemat blokowy; b) widok i kierunek przemieszczania oświetlonej fotodiody
Z - zasilacz lasera; L - laser He-Ne; F - fotodioda kwadrantowa; UOS - układ
obróbki sygnałów; V - multimetr cyfrowy
Zmianę położenia wiązki laserowej zrealizowano przez przesuwanie fotodiody o 0,5 mm
w pionie lub w poziomie. Zmianę promienia plamki realizowano przez zmianę odległości
lasera od powierzchni fotodiody. Wyniki pomiarów przedstawiono na rysunkach:
6
V
U[V]
5
0
Ux
Us
Up
-5
-10
-5
0
5
10
x s [mm]
Rys. 6. Zależność sygnałów wyjściowych układu do rejestracji środka wiązki laserowej od
odciętej środka plamki o średnicy 2r = 3,6 mm.
U[V]
5
0
Ux
Us
Up
-5
-15
-10
-5
0
5
10
15
x s [mm]
Rys. 7. Zależność sygnałów wyjściowych układu do rejestracji środka wiązki laserowej od
odciętej środka plamki o średnicy 2r = 5,6 mm.
7
U[V]
5
0
Ux
Us
Up
-5
-15
-10
-5
0
5
10
15
x s [mm]
Rys. 8. Zależność sygnałów wyjściowych układu do rejestracji środka wiązki laserowej od
odciętej środka plamki o średnicy 2r = 7,0 mm.
Ux [V]
5
0
2r = 3,6 mm
2r = 5,6 mm
2r = 7,0 mm
-5
-15
-10
-5
0
5
10
15
x s [mm]
Rys. 9. Zależność sygnału Ux układu do rejestracji środka wiązki laserowej od odciętej środka
plamki dla różnych średnic 2r plamki .
Z rysunku 9. wynika, że im większa plamka tym większy zakres xs , w którym może być
rejestrowana. Im mniejsza plamka tym szybsze nasycenie i większa stromość charakterystyki.
8
Tabela 2.
Parametry charakteryzujące funkcję U x f ( x s ) w zależności od średnicy wiązki laserowej o
mocy 0,8 mW
Średnica plamki
Nachylenie
Zakres liniowości
Zakres pomiarowy
mm
3,6
5,6
7,0
V/mm
3,0
2,4
1,6
mm
1,0
1,5
2,0
mm
1,8
3,5
3,8
5. Literatura
1.
M. Nowak, "Metrologiczne właściwości fotodiody kwadrantowej", AND Nr 5-6, 1989.
2.
B. Buczek, M. Nowak, T. Persak, "Określanie współrzędnych kątowych optycznych
źródeł promieniowania przy pomocy fotodiody kwadrantowej", Biuletyn WAT Nr 12,
1980.
М. Д. Устинов, "Лазерная покаця", Изд.-во Машиностроение, 1984.
A. Dubik, "1000 słów o laserach i promieniowaniu laserowym" , Wyd. MON Warszawa,
1989.
3.
4.
9