Modułowy programowalny przekaznik
czasowy firmy Aniro.
Rynek sterowników programowalnych
Sterowniki programowalne PLC od wielu lat są podstawowymi systemami
stosowanymi w praktyce przemysłowej i stały się integralną częścią automatycznych systemów
sterowania. Są to komputery przemysłowe, które w czasie rzeczywistym i często pod nadzorem
systemu operacyjnego zbierają pomiary, wykonują programy aplikacyjne i generują sygnały
sterujące. Wiele firm oferuje różne rodzaje sterowników począwszy od dużych jednostek
(ponad 500 wej/wyj) do małych (15-128 wej/wyj). W prostych układach sterowania stosuje się
nano sterowniki (mniej niż 15 wej/wyj). Są to najczęściej kompaktowe urządzenia zawierające
zwartą niemodyfikowalną budowę i funkcjonalność. Zapotrzebowanie na sterowniki mikro i
nano rośnie, gdyż takie są najczęściej wykorzystywane w małych maszynach i prostym
sterowaniu procesem. Ważna jest również prostota programowania, dopasowanie potrzeb do
możliwości sterownika oraz cena. W wielu aplikacjach, w których pracują nano sterowniki, np.
LOGO!24 - Simensa, EASY – Moellera czy NEED – Relpolu, możliwości sterownika nie są w
pełni wykorzystane, co niepotrzebnie podwyższa cenę urządzenia końcowego.
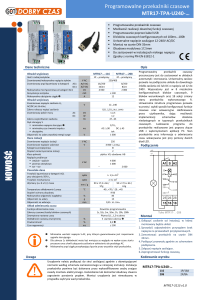
Nowa seria wyrobów MPC-TPA-U240-XXX
W tak zdefiniowaną lukę wchodzi nowy swobodnie programowalny przekaźnik
czasowy wprowadzony do oferty firmy Aniro Grupa Handlowa Sp. z o.o. Jest to
programowalny układ czasowy oznaczony kodem MPC-TPA-U240-XXX, w którym
realizowana funkcja czasowa jest definiowana przez użytkownika i ładowana do przekaźnika
programowalnego przy pomocy aplikacji TimProg. Dostępne są w wykonaniach 2P/8A (…208) lub 1P/16A (…-116). Jest to pierwsze tego typu urządzenie na rynku.
Rysunek 1 Przekaźnik czasowy programowalny MPC-TPA-U240-xxx
Wyposażony jest w 8 niezależnie konfigurowalnych bloków czasowych, 9 bloków
warunkowych oraz 18 sekcji zmiany stanu przekaźnika wykonawczego R. Uniwersalna
struktura programowa pozwala w prosty i szybki sposób konfigurować funkcje czasowe oraz
sekwencyjne zdefiniowane przez użytkownika. Umożliwia to implementacje schematów
działania niedostępnych w typowych przekaźnikach czasowych. Ładowanie programu do
przekaźnika realizowane jest poprzez złącze USB z wykorzystaniem aplikacji PC. Stan
1
przekaźnika oraz informacja o odmierzaniu czasu wskazywana jest przy pomocy dwóch diod
LED. Cechy charakterystyczne nowych urządzeń to:
Możliwość realizacji dowolnej funkcji czasowej
Programowanie poprzez kabel mini-USB
8 bloków czasowych konfigurowanych od 100ms…100h
Uniwersalne napięcie zasilające 12-240V AC/DC
Montaż na szynie DIN 35mm
Obudowa modułowa 17,5mm
Do zastosowań w instalacjach niskiego napięcia
Zgodny z normą PN-EN 61812-1
Aplikacja TimProg
Aplikacja TimProg do programowania przekaźnika programowalnego jest bezpłatna i
dostępna na stronie internetowej - http://www.aniro.pl Dostępna jest również instrukcja
programowania i pracy z aplikacją TimProg. Elastyczna struktura programowa pozwala na
prostą i szybką implementację zarówno standardowych, jak i nietypowych funkcji czasowych,
umożliwiając budowę układów sterowania dostosowanych do indywidualnych potrzeb
odbiorcy. Zastosowanie interfejsu USB pozwala na programowanie przekaźnika przy pomocy
standardowego kabla mini-USB, ułatwiając i minimalizując tym samym koszty uruchomienia
urządzeń końcowych. Zasoby programowe aplikacji zostały przedstawione na rysunku 2.
Zasób
Ilość
Opis
1. Umożliwia zdefiniowanie stanu początkowego przekaźnika wykonawczego R po załączeniu napięcia zasilającego.
R=0
R=1
START
Kontrola
stanu R
Blok
warunkowy
Blok
czasowy
1
18
2.
Określa dodatkowe opóźnienie po załączeniu zasilania, umożliwiające detekcję stanu sygnału wejściowego S przed
rozpoczęciem realizacji zaprogramowanej funkcji (patrz „minimalny czas trwania impulsu” w danych technicznych).
0ms (brak opóźnienia)
50ms
100ms
150ms
1.
Definiuje operację na przekaźniku wykonawczym.
Nie zmieniaj stanu R
Włącz R
2.
Po wykonaniu operacji na przekaźniku określa następny realizowany etap programu.
Kontynuuj (kolejny etap)
Skocz do…
(wykonuje skok do podanego etapu)
1.
Sprawdza ustawiony warunek i wykonuje skok do podanego etapu.
Bezwarunkowo (wykonuje operację skoku
Czekaj na S=0
bez sprawdzania warunku)
Czekaj na S=1
Czekaj na zmianę S z 0 na 1
Czekaj na zmianę S z 1 na 0
Czekaj na dowolną zmianę S
Jeżeli S=0
Jeżeli S=1
Jeżeli R=0
Jeżeli R=1
2.
Definiuje etap lub etapy, do których nastąpi skok. Dla czterech ostatnich warunków należy podać dwa miejsca skoków
– pierwszy jest istotny, gdy warunek jest spełniony, drugi dla sytuacji przeciwnej.
1.
Pozwala na ustawienie odmierzanego czasu.
Zakresy: 1s, 10s, 1m, 10m, 1h, 10h, 100h
Płynna regulacja 0,1…1,0 wartości zakresu
Możliwość pobrania ustawień z potencjometrów zamontowanych na panelu przekaźnika
2.
W trakcie odmierzania czasu możliwa jest kontrola styku S i wykonanie zdefiniowanej operacji. Warunek pozwala na
przerwanie liczenia czasu po spełnieniu warunku. Operacja skoku została opisana w polu „Kontrola stanu R”.
Nie sprawdzaj styku S
Skocz jeżeli S=0
Skocz jeżeli S=1
Skocz jeżeli zmiana S z 0 na 1
Skocz jeżeli zmiana S z 1 na 0
Skocz jeżeli dowolna zmiana S
3.
Po całkowitym zakończeniu odmierzania nastawionego czasu program przechodzi do kolejnego etapu znajdującego
się po bieżącym bloku czasowym.
9
8
Wyłącz R
Neguj R (zmiana stanu na przeciwny)
2
Rysunek 2 Zasoby programowe przekaźnika programowalnego MPC-TPA-U240-xxx
Aplikacja udostępnia wiele opcji, które ułatwiają opracowanie i zapis programu do
sterownika. Są to:
Edycja konfiguracji wartości początkowych, operacji na przekaźniku R, skoków
warunkowych i bloków czasowych.
Ładowanie i odczyt programu przekaźnika.
Podgląd bieżącego stanu pracy – aktualnego etapu, stanu styku S, stanu przekaźnika R
i wartości odmierzanych czasów.
Symulacja działania przygotowanego programu wraz z możliwością krokowania bez
konieczności podłączania przekaźnika.
Zapis i odczyt z dysku funkcji czasowej zdefiniowanej przez użytkownika.
Eksport ustawień do pliku tekstowego w celu przygotowania dokumentacji.
Obsługa w języku polskim i angielskim.
Szablony typowych programów funkcji czasowych w podkatalogu Functions w miejscu
zainstalowania aplikacji.
Interfejs aplikacji TimProg został przedstawiony na rysunku 3. Za pomocą tego
interfejsu można zdefiniować schemat działania funkcji czasowej lub sekwencyjnej
przygotowanej przez użytkownika.
Rysunek 3 Interfejs graficzny aplikacji TimProg
Ikony
umożliwiają załadowanie do przekaźnika przygotowanego programu
lub jego odczytanie do pamięci programu.
Ikony
służą do uruchomienia i zatrzymania podglądu pracy przekaźnika w
czasie rzeczywistym. Aktualne wartości stanów wejścia sterującego i przekaźnika
wykonawczego widoczne są w dolnej części aplikacji w formie symbolu styku i lampki
kontrolnej – rysunek 4.
3
Rysunek 4 Pole stanów wejścia sterującego S oraz przekaźnika R
Ciekawą funkcją jest możliwość programowej symulacji pracy zdefiniowanej funkcji
czasowej bez konieczności podłączenia przekaźnika czasowego. Panel przycisków
umożliwia wejście w tryb symulacji i ciągłą lub krokową analizę pracy
przekaźnika w tym trybie umożliwia
Aby ułatwić przygotowanie dokumentacji urządzenia, w którym pracuje sterownik
programowalny, wbudowana została opcja zapisu ustawień programu do pliku tekstowego
wywoływana ikoną
. Przykładowy fragment pliku przedstawiono na rysunku 5.
Rysunek 5 Zapis w formie tekstowej programu sterownika.
Dokładny opis definiowania i analizy funkcji czasowych zawarty jest w instrukcji
obsługi oprogramowania TimProg dostępnej na stronie producenta.
Przykład tworzenia programu
Poniżej przedstawiono sposób tworzenia programu funkcji TB zdefiniowanej jako odmierzanie
czasu zadziałania. Schemat takiej funkcji i jej opis przedstawiono na rysunku 5.
U
TB
T
T
R
t
Odmierzanie czasu zadziałania (TB) - po załączeniu
zasilania U przekaźnik wykonawczy R zostaje
załączony i pozostaje w tym stanie przez czas T. Po
upływie czasu T przekaźnik R zostaje na stałe
wyłączony. Rozpoczęcie kolejnego cyklu pracy
możliwe jest po wyłączeniu i ponownym podaniu
napięcia zasilającego.
Rysunek 5 Wykres i opis funkcji TB
4
Krok 1:
Pole START
Ustawić Włącz R, gdyż przekaźnik R po podaniu
zasilania ma rozpocząć pracę od stanu
załączonego.
Zwłoka 0ms. Dokładny opis znaczenia pola
zwłoki czasowej został opisany w instrukcji
obsługi programu. Po wykonaniu operacji
program przechodzi do etapu 1.
Krok 2:
Etap 1 – pole KONTROLA STANU R.
Ustawić – Nie zmieniaj R oraz Kontynuuj.
Przekaźnik pozostanie załączony i program
przechodzi do kolejnego etapu o numerze 2.
Krok 3:
Etap 2 – pole BLOK WARUNKU.
Ustawiamy Bezwarunkowo i Kontynuuj. Żaden
warunek dla tej funkcji nie jest potrzebny i
przechodzimy do kolejnego etapu o numerze 3.
Krok 4:
Etap 3 – pole KONTROLA STANU R.
Nie ma potrzeby zmiany stanu R. Ustawiamy Nie
zmieniaj R oraz Kontynuuj przechodząc do etapu
4.
5
Krok 5:
Etap 4 – pole BLOK CZASOWY
Ustawiamy wymagany czas T, np. 7 min. i 7 s.
Czas stały – ustawiany na stałe w programie bez
możliwości
regulacji
z
zewnętrznych
potencjometrów. Przez ustawiony czas
przekaźnik zatrzyma się na etapie 4, a następnie
przeskoczy do etapu 5.
Krok 6:
Etap 5 – pole KONTROLA STANU R.
Po odmierzeniu zadanego czasu należy
przekaźnik wykonawczy wyłączyć poprzez
ustawienie Wyłącz R oraz zakończyć działanie
programu wykonując skok do pola STOP.
Podsumowanie:
Przedstawione programowalne przekaźniki czasowe serii MPC-TPA-U240-xxx są pierwszymi tego
typu urządzeniami na rynku. Charakteryzują się:
prostym sposobem programowania,
dużą dostępną biblioteką programów,
możliwością zmiany oprogramowania na obiekcie,
programowaniem poprzez PC za pomocą bezpłatnej aplikacji,
komunikacja za pomocą standardowego złącza mini USB,
możliwością symulacji działania opracowanego programu bez konieczności podłączania
przekaźnika,
możliwością kontroli stanu pracy w czasie rzeczywistym,
atrakcyjną ceną
Przedstawiony przekaźnik swobodnie programowalny daje duże możliwości budowania
sekwencyjnych algorytmów czasowych w oparciu o obserwacje stanu na wejściu sterującym. Jest
dobrą alternatywą dla prostych układów sterowania przy opracowywaniu nowych oraz modernizacji
istniejących maszyn i urządzeń.
6