Magnetyczne Techniki Diagnostyczne
Zakład Opracowań i Produkcji Aparatury Pomiarowej
"Mag-Lab" s.c.
INSTRUKCJA OBSŁUGI
Miernik pola rozproszonego
MPR-H2c
80-335 Gdańsk, ul. Sztormowa 1A/6,
tel./fax (58) 57 82 44
1. Przedstawienie ogólne przyrządu
Miernik MPR-H2c jest przyrządem służącym do
pomiaru natężenia
magnetycznego pola rozproszonego konstrukcji wykonanych ze stali
ferrytycznych. Przyrząd przeznaczony jest głównie do detekcji i oceny wielkości
wad powierzchniowych i podpowierzchniowych. Za pomocą tego przyrządu
można
zmierzyć jednocześnie dwie wielkości:
B - natężenie indukcji
magnetycznej oraz B - różnicę natężenia indukcji magnetycznej w dwóch blisko
siebie położonych punktach.
Przyrząd zawiera układy służące do pomiaru sygnału B i sygnału B oraz do
wizualnej i dźwiękowej ich sygnalizacji. Zastosowano dwa wskaźniki poziomu
tych sygnałów: cyfrowy dla sygnałów B i B oraz świetlny (linijka świetlna LS)
dla sygnału B. Poziom sygnału B jest także sygnalizowany za pomocą sygnału
dźwiękowego przy czym jest to albo dźwięk o częstotliwości modulowanej
sygnałem B (stan 1) albo dźwięk o stałej częstotliwości występujący dopiero
po przekroczeniu określonego poziomu przez sygnał B (stan 2).
2. Dane techniczne przyrządu
Pomiar natężenia indukcji B
Zakres 1. : 1 T - 2 mT
Zakres 2.: 10 T - 20 mT
Pomiar różnicy natężenia indukcji B
Zakres 1. 0.4 mT
Zakres 2. : 0.2 mT
Zakres regulacji linijki świetlnej LS
Liczba pól świetlnych: 24 (w tym 8 pól w kolorze czerwonym )
Dynamika wskazań : płynna regulacja zakresu od 0.4 V do 2.6 V.
Zmiana sygnału dźwiękowego
Wybierane są dwa stany sygnalizacji poziomu sygnału B:
Stan 1.: płynna zmiana częstotliwości dźwięku względem częstotliwości bazowej
fo = 2 kHz w zależności wartości parametru DB w zakresie od 0.5 kHz do 4 kHz.
Stan 2.: Sygnał dźwiękowy o stałej częstotliwości (f 1 kHz) występuje po
przekroczeniu przez różnicę DB progu poziomu równemu 80% zakresu wskazań
linijki świetlnej
Zakres temperatury otoczenia
2
Dla układu pomiarowego :
od +5o C do +40o C
Dla sondy (bez ekranu):
od -20oC do + 40o C.
Wpływ zmian temperatury na wskazania przyrządu:
pomiar parametru B : 2 % pełnego zakresu na 1o C,
pomiar parametru DB : 0.5 % pełnego zakresu na 1o C.
Napięcie zasilające
Zasilanie z sieci o napięciu 220 V lub zasilanie z akumulatora niklowokadmowego. Pojemność akumulatora: 850 mAh,
napięcie znamionowe 14.4 V. Ładowanie za pomocą wbudowanego prostownika
zasilanego przez zewnętrzny transformator .
Pobór mocy
maksymalnie 1.5 W.
Czas pracy
Czas pracy przy zasilaniu bateryjnym - około 5 h
Wymiary
Miernik: wysokość - 70 mm, szerokość - 145 mm, głębokość - 190 mm.
waga: 1100 G.
Głowica : wymiary sondy: podstawa 11 mm na 11.5 mm i o długość 62 mm,
długość kabla - 180 cm;
3. Zasada pracy przyrządu
Przyrząd
MPR-H2c został skonstruowany w celu optymalizacji procesu
lokalizacji wady struktury materiału poprzez pomiar natężenia indukcji pola
rozproszonego z wykorzystaniem podwójnego czujnika pola magnetycznego..
Przyrząd zaopatrzony jest w głowicę oraz w miernik. Głowica zawiera dwa
niezależne czujniki natężenia pola magnetycznego. Dzięki temu możliwy jest
pomiar natężenia indukcji magnetycznej w dwóch sąsiednich punktach. Miernik
składa się z szeregu podzespołów służących do pomiaru oraz wizualizacji i
sygnalizacji dźwiękowej wyników pomiaru.
Schemat blokowy przyrządu przedstawia rys. 1.
3
b
MPRH2c
a
W1
G2
a
W2
T
BZ
b
B
SB
b
W4
s1
UZ1
LCD
a
s2
P1
a
G1
b
LS
W3
a
W5
b
R1
B
GZ
GD
G3
UZ2
P2
GW 1
GW 2
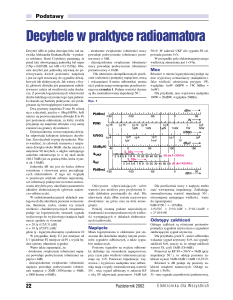
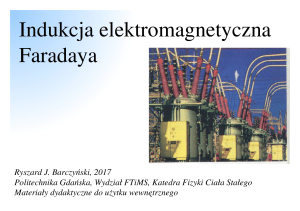
Rys. 1. Schemat blokowy MPR-H2c. SB - sonda, B - układ pomiaru indukcji, UZ1
- układ zerowania układu B, B - układ pomiaru sygnału B, UZ2 - układ - układ
zerowania układu B, BZ - blok zasilania, LCD - woltomierz i wyświetlacz
cyfrowy, LS - woltomierz z linijką świetlną, GD - generator dźwięku, GW1, GW2
- przetworniki dźwięku, T - zasilacz zewnętrzny, GZ - słuchawka.
Elementy podstawowe przyrządu to:
- SB - sonda,
- B i B - podzespoły wzmacniaczy wraz z układami zerowania UZ1 i UZ2,
- LCD - woltomierz cyfrowy z wyświetlaczem ciekłokrystalicznym,
- LS - woltomierz cyfrowy z wyświetlaczem z diod luminescencyjnych (linijka
świetlna),
- GD - generator sygnałów dźwiękowych wraz z przetwornikami dźwiękowymi
GW1 i GW2
- BZ - blok zasilania.
W skład przyrządu wchodzą także zasilacz zewnętrzny T oraz słuchawka GZ.
Sygnały napięciowe z sondy są analizowane za pomocą dwóch podzespołów
analogowych. Podzespół B dostarcza napięcia proporcjonalnego do natężenia
indukcji
magnetycznej natomiast podzespół B dostarcza napięcia
proporcjonalnego do różnicy dwóch natężeń indukcji magnetycznej.
Układy zerowania UZ1 oraz UZ2 służą do automatycznego zerowania
napięciowego sygnału wyjściowego podzespołów B i B. Zerowanie następuje
4
po naciśnięciu odpowiednio przełączników P1 i P2. Przełączniki W2 i W3 są
wykorzystywane do zmiany wzmocnienia napięciowego tych podzespołów.
Podzespół woltomierza
z wyświetlaczem ciekłokrystalicznym (LCD) jest
przełączany za pomocą przełącznika W4 na wyjścia podzespołów B (położenie
'b') i B (położenie 'a'). Podzespół woltomierza i linijki świetlnej LS jest
połączony na stałe do wyjścia podzespołu B. Zakres czułości podzespołu LS
(położenia świecącej diody w zależności od napięcia wejściowego) można
regulować
za pomocą potencjometru R1. Skrajne cztery diody elektroluminescencyjne z linijki świetlnej emitują kolor czerwony. Zmiany poziomu
sygnału B są także sygnalizowane na dwa sposoby za pomocą dźwięku.
Generator dźwięku GD, sterowany napięciem sygnału z B, dostarcza albo
sygnału dźwiękowego o częstotliwości modulowanej tym napięciem, albo sygnału
dźwiękowego ciągłego, które jest generowane po przekroczeniu przez sygnał B
wybranego progu napięcia. Sposób sygnalizacji wybierany jest za pomocą
przełącznika W5. W położeniu 'a' generowany jest dźwięk o modulowanej
częstotliwości natomiast w położeniu 'b' dźwięk (o stałej częstotliwości)
generowany jest tylko wtedy, gdy sygnał B przekroczy pewien poziom (ustalony
na około 80% pełnego zakresu wskazań podzespołu LS). Blok zasilania BZ
dostarcza odpowiednich napięć a także służy do ładowania akumulatorów. Blok
ten jest załączany za pomocą przełącznika W1.
5
4. Obsługa przyrządu.
4.1. Rozmieszczenie elementów regulacyjnych
Schemat rozmieszczenia tych elementów na płycie czołowej pokazuje rys. 2.
B
LS
R1
B, B
P2
P1
0 B
0B
£
I
I
B
I
a
ON
b
OFF
LCD
1999
II
II
B
B
W5
W4
W3
W2
W1
B
II
LCD
SM
MPR-H2 c
Mag-Lab
s.c.
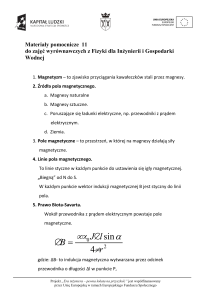
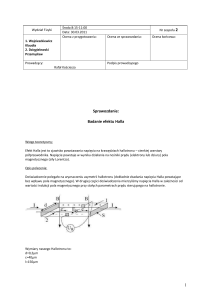
Rys. 2. Płyta czołowa MPR-H2c. - linijka świetlna, LCD - wyświetlacz, R1 regulacja czułości LS, P1 - zerowanie B,
P2 - zerowanie B, W1 - wyłącznik
zasilania, W2 - zmiana wzmocnienia B, W3 - zmiana wzmocnienia B,
W4 - przełączenie LCD, W5 - zmiana sygnalizacji dźwiękowej.
Na tym rysunku zaznaczono występujące na płycie napisy oraz czcionką
pochyloną zaznaczono nazwy tych elementów, jaki zostały użyte na schemacie
blokowym (rys. 1).
Wyszczególnione na rys. 2 elementy to:
LS - linijka świetlna (opisana na płycie symbolem B),
LCD - wyświetlacz ciekłokrystaliczny woltomierza LCD (opisany na płycie
symbolem B, B);
P1 i P2 - przyciski układów zerowania UZ1 (P1 oznaczony na płycie jako 0B) i
UZ2 (P2 oznaczony jako 0 B);
R1 - potencjometr regulacji czułości linijki świetlnej LS (oznaczony na płycie
jako B) ;
W1 - przełącznik zasilania (oznaczony jako ON/OFF ) w położeniu 'a' miernik jest załączony, w położeniu 'b' - wyłączony;
W2 - przełącznik zakresu (czułości) podzespołu pomiaru natężenia indukcji
magnetycznej B (oznaczony jako B), w położeniu 'a' (oznaczony jako I) zakres o mniejszej czułości, w położeniu 'b' (oznaczony jako II)
zakres
wskazań o większej czułości;
6
W3 - przełącznik zakresu (czułości) podzespołu pomiaru sygnału B (oznaczony
jako B), w położeniu 'a' (oznaczony jako I) - zakres
wskazań
o mniejszej czułości a w położeniu 'b' (oznaczony jako II) zakres o większej czułości);
W4 - przełącznik wskazań wyświetlacza LCD (oznaczony na płycie jako
LCD), w położeniu 'a' - (oznaczonym jako B) - wskazywane są
wartości sygnału B a w położeniu 'b' - wartości sygnału B (położenie
oznaczone na płycie jako B);
W5 - przełącznik zmiany sposobu sygnalizacji dźwiękowej natężenia sygnału
B, w położeniu 'a' - (oznaczony jako I) - generowany jest dźwięk
modulowany a w położeniu 'b' (oznaczony jako II)n - dźwięk ciągły.
Na rys. 3 pokazano rozmieszczenie gniazd na tylnej stronie miernika. Są to:
G1 - gniazdo sondy SB,
G2 - gniazdo zasilania dla zasilacza T,
G3 - gniazdo słuchawek.
G3
G2
G1
Rys. 3. Rozmieszczenie gniazd na płycie tylnej MPR-H2c: G1 - gniazdo sondy, G2
-gniazdo zasilania , G3 - gniazdo słuchawek
4.2. Metodyka pracy
7
4.2.1. Przygotowanie przyrządu do pracy i kontrola jego wskazań.
Miernik jest gotowy do pracy po jego włączeniu przełącznikiem W1 (w położenie
górne 'a', rys. 1). Stabilne wskazania miernika uzyskuje się po czasie około
kilkunastu sekund, w którym ustala się temperatura czujników natężenia pola
magnetycznego. W przypadku stwierdzenia zaniku wskazań wyświetlacza LCD
należy naładować akumulator za pomocą zasilacza T.
Zerowanie wskazań miernika
Po włączeniu zasilania należy wstępnie wyzerować wskazania miernika.
Zerowanie układów pomiaru indukcji B oraz sygnału B wykonuje się
automatycznie po wciśnięciu przycisków P1 i P2. Taki sposób zerowania
pozwala na pomiary sygnału B i B względem danego poziomu indukcji B i
poziomu lokalnych przyrostów B. Układ zerowania po wciśnięciu przycisku
zapamiętuje aktualną wartość napięcia wyjściowego. Wartość ta jest następnie
odejmowana od sygnału wyjściowego. Układ elektroniczny kompensuje wartość
napięcia wyjściowego obu układów analogowych z dokładnością 5 ostatniej
cyfry wyświetlacza LCD.
Aby wyzerować wskazania miernika indukcji B dla B = 0, należy przełączyć
wskaźnik LCD na pomiar B (przełącznik W4 w położenie dolne 'B'), umieścić
sondę poza polem magnetycznym i nacisnąć przycisk P1 ('0B'). Takie zerowanie
wskazań miernika indukcji należy wykonywać po zmianie czułości miernika.
UWAGA 1
Podczas zerowania wskazań miernika indukcji B w warunkach polowych należy
uwzględnić pole magnetyczne Ziemi. Jego składowa pionowa wynosi około 40
T a składowa pozioma przyjmuje wartość maksymalną około 18 T (zależnie
od kierunku pomiaru względem powierzchni Ziemi i kierunku północnego
bieguna). W budynkach o konstrukcji stalowej pole to może być w znacznym
stopniu osłabione.
Aby wyzerować wskazania miernika sygnału B należy użyć przycisku P2
('0B'). Po takim wyzerowaniu zaświetlane są dwie środkowe diody linijki
świetlnej LS. W przypadku zerowania poziomu sygnału B, czynność tę można
wykonać dla dowolnej wartości indukcji magnetycznej.
4.2.2. Pomiar indukcji magnetycznej B.
8
Dla odczytu natężenia indukcji B należy przełączyć wyświetlacz LCD za
pomocą przełącznika W4 (LCD) w położenie dolne ('B', rys. 3). Zakres pomiaru
można zmienić za pomocą przełącznika W3. Korekcję poziomu wskazań
(zerowanie) wykonuje się za pomocą przycisku P1 ('0B', rys. 3).
UWAGA 2
Dla przeliczenia wskazań miernika z indukcji magnetycznej B wyrażonej w
teslach [T] na często stosowane natężenie pola magnetycznego H wyrażone w
amperach na metr [A/m] należy stosować podstawową zależność:
H = B/ 4 10-7,
z której wynika przybliżona relacja: H [A/m] 0.8 B [T]. Stosując miernik
MPR-H2c można zatem przy ocenie pola w jednostkach [A/m] ograniczyć się do
pomnożenia jego wskazań na zakresie I (mniej czułym) w przybliżeniu przez 10
lub stosowania bezpośrednio wskazań miernika na zakresie II (bardziej czułym).
4.2.3. Pomiar przyrostów natężeń indukcji magnetycznej B.
Odczyt poziomu różnicy uzyskuje się na dwa sposoby: przybliżony za pomocą
linijki świetlnej (zmienia się położenie plamki względem pozycji środkowej) oraz
dokładny za pomocą wyświetlacza ciekłokrystalicznego LCD (odczyt cyfrowy).
Wyświetlacz LCD załącza się na pomiar sygnału B za pomocą przełącznika W4
(w położenie górne 'a') a zakres pomiaru parametru B można zmieniać za
pomocą przełącznika W3. Linijka świetlna LS wskazuje zawsze zmiany poziomu
sygnału B. Dla wartości dodatnich napięcia B zapalają się fotodiody w lewej
strony linijki. Czułość wskazań tej linijki można zmieniać za pomocą
potencjometru R1 (B, rys. 2). Dla wybranego poziomu parametru B
(zmierzonego równolegle za pomocą wyświetlacza LCD), potencjometrem R1
ustala się żądane położenie świecącej diody linijki LS.
4.2.4. Zmiana rodzaju sygnalizacji dźwiękowej
Za pomocą przełącznika W5 (oznaczony jako SM na płycie czołowej) zmienia się
stan pracy dźwiękowego sygnalizatora poziomu sygnału B. W położeniu górnym
tego przełącznika 'I' , generator emituje dźwięk ciągły o częstotliwości zależnej
od poziomu sygnału B. Po przełączeniu w położenie dolne 'II' - sygnał
dźwiękowy występuje dopiero po przekroczeniu przez sygnał B poziomu 80%
9
pełnego wskazania linijki świetlnej. Sygnał dźwiękowy modulowany jest również
doprowadzony do gniazda G3 na tylnej płycie miernika.
4.2.5. Metodyka ustawiania sondy.
Mierzone jest natężenie pola magnetycznego w kierunku prostopadłym do osi
głowicy. Położenie czujników jest symetryczne względem osi symetrii głowicy.
W przypadku pomiaru parametru B wskazania dotyczą różnicy natężenia
indukcji magnetycznej w punktach odległych od siebie o około 50.5 mm.
Odległość ta związana jest z konstrukcją sondy.
5. Metodyka użycia miernika MPR-H2c jako defektoskopu
5.1. Pole rozproszone
Pomiar pola rozproszonego przy powierzchni konstrukcji stalowej pozwala na
ujawnienie wad powierzchniowych i podpowierzchniowych, gdyż wady tę są
źródłem specyficznych anomalii w rozkładzie przestrzennym indukcji
magnetycznej przy powierzchni metalu. Natężenie pola rozproszonego zależy
istotnie i od stopnia namagnesowania materiału i od geometrii samej wady.
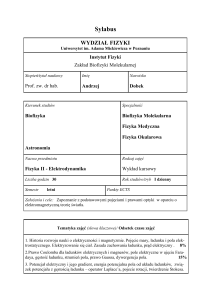
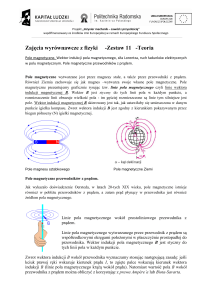
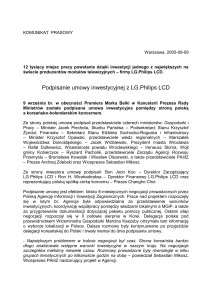
Rysunek 4 i rysunek 5 ilustrują zmiany natężenia składowej normalnej Bn a także
szybkości zmian (przyrosty B) tej składowej dla materiału zawierającego wadę
powierzchniową w formie wąskiej szczeliny. Zobrazowane są dwa przypadki
stanu namagnesowania: - stan magnesowania za pomocą pola zewnętrznego (np.
przy użyciu magnesu stałego) oraz dla stan namagnesowania resztkowego.
Na rysunkach tych wykreślono cztery funkcje dotyczące natężenia składowej
normalnej Bn. Są to: 1) - rozkład pola od wady, 2) - rozkład długozasięgowy
składowej, 3) - suma obu składników oraz 4) - przyrosty Bn. Funkcja rozkładu
składowej Bn(x) odpowiada rozkładowi pola pochodzącego od wąskiej szczeliny
powierzchniowej.
10
Rys. 4. Schemat zmian składowej normalnej Bn w okolicy wady próbki
magnesowanej: 1 składowa pola od wady, 2 - składowa długozasięgowa,
3 - pole wypadkowe, 4- przyrosty B.
100
200
150
75
1
50
100
50
25
0
0
-25
-50
2
-100
-50
B [ j.w. ]
Bn [ j.w. ]
4
-75
-150
3
-100
-200
-125
-250
-15
-10
-5
0
5
10
15
x [ mm ]
Rys. 5. Schemat zmian składowej normalnej Bn w okolicy wady próbki
w stanie namagnesowania resztkowego: 1 składowa pola od wady,
2 - składowa długozasięgowa, 3 - pole wypadkowe, 4 - przyrosty B.
11
Kierunki zmian tej składowej są przeciwstawne dla stanu "magnesowania" i dla
stanu "namagnesowania resztkowego". Składowa długozasięgowa Bn(x) jest
przedstawiona przez linię prostą o nachyleniu ujemnym i także o wartościach
ujemnych, gdyż założono, że wada znajduje się w strefie, w której wektory
indukcji skierowane są w kierunku powierzchni. Wypadkowa funkcja Bn(x)
zmienia się najszybciej w okolicy wady i tę właśnie cechę zmian składowej Bn
wykorzystano dla detekcji położenia wady za pomocą miernika MPR-H2c.
Należy znaleźć miejsce o maksymalnej wartości różniczki z zależności Bn(x).
Wyliczone rozkłady zmian wartości B (dla x stałego) pokazano na rysunkach
4 i 5 w formie wykresów (4) ze skalą po prawej stronie rysunków. Wykresy
przyrostów B ujawniają ekstrema, przy czym środkowe największe ekstremum
jest położone centralnie nad wadą i to niezależnie od tego, czy materiał jest
magnesowany, czy też w stanie namagnesowania resztkowego. Wynika stąd
wniosek, iż lokalizacja wady może być oparta na procedurze sprowadzającej się
do znalezieniu położenia maksimum (lub minimum) przyrostów B składowej
indukcji Bn (normalnej do powierzchni badanego elementu). Miernik MPR-H2c
pozwala na pomiar natężenia składowej Bn indukcji magnetycznej B przy
powierzchni metalu a w szczególności przyrostów B tej składowej.
5.2. Detekcja wady
5.2.1. Warunki magnesowania
Wielkość natężenia pola rozproszonego od wady jest tym większa im większe jest
namagnesowanie materiału zawierającego. W przypadku konstrukcji technicznych
stan namagnesowania można w przybliżeniu ocenić mierząc poziom składowej
normalnej Bn. W tym celu odczytuje się wskazania miernika MPR-H2c dla
sygnału B, przykładając sondę prostopadle do badanej powierzchni. Należy w
tych pomiarach uwzględnić przestrzenny rozkład poziomu tej składowej,
który zależny jest od kształtu badanego obiektu. W przypadku, gdy stan
namagnesowania obiektu był niewielki - to znaczy, gdy składowa Bn przyjmuje
wartości na
poziomie pola ziemskiego, koniecznym staje się lokalne
namagnesowanie materiału.
5.2.2. Określenie położenia wady
Metodyka detekcji wad za pomocą miernika MPR-H2c oparta jest bezpośrednio o
przedstawioną cechę rozkładu przyrostów B składowej normalnej natężenia
indukcji magnetycznej. Sprowadza się ona do poszukiwania miejsca w którym
sygnał B osiąga wartość maksymalną. Oś sondy znajduje się wówczas nad osią
12
wady. W przypadku występowania silnych długozasięgowych zmian sygnału B,
należy ten poziom sygnału wyzerować za pomocą przycisku 'O B' .
5.2.3. Określenie wielkości wady.
Wielkość sygnału B zależy od szybkości zmian składowej normalnej Bn indukcji
pola rozproszonego wokół wady a tym samym od geometrii wady i od stopnia
namagnesowanie materiału w okolicy wady. Przyjmując za słuszną regułę, iż
praktycznie występujące wady przypowierzchniowe typu pęknięć mają bardzo
niewielką szerokość w porównaniu z ich głębokością, można założyć iż wielkość
sygnału B jest w tym przypadku zależna głównie od głębokości wady dla
danego stopnia namagnesowania. Należy także wziąć pod uwagę relację między
głębokością wady a grubością materiału. Ze względu na złożony charakter
ilościowej zależności poziomu sygnału B od geometrii wady zasadne jest zatem
w badaniach ilościowych wielkości wady stosować metodę porównawczą. Metoda
ta polega na ustaleniu najpierw stopnia namagnesowania materiału a następnie na
wykorzystaniu odpowiednich nomogramów uzyskanych w procedurze skalowania
lub na porównaniu wskazań miernika MPR-H2c dla maksimum B z poziomem
tego sygnału zmierzonym dla wzorca wady.
5.2.3. Detekcja wad podpowierzchniowych
Powyższe uwagi na temat metodyki detekcji wad powierzchniowych i oceny ich
wielkości dotyczą również badań wad podpowierzchniowych.
Pole rozproszone od wad podpowierzchniowych cechuje się istotnym osłabieniem
dynamiki zmian składowej normalnej Bn indukcji magnetycznej. To powoduje, iż
sygnał przyrostów B mierzony miernikiem MPR-H2c jest znacznie słabszy i
bardziej rozmyty przestrzennie w porównaniu z rozkładem tego sygnału
obserwowanym dla wad powierzchniowych.
13
Spis treści
1. Przedstawienie ogólne przyrządu
2. Dane techniczne przyrządu
3. Zasada pracy przyrządu
4. Obsługa przyrządu
4.1. Rozmieszczenie elementów regulacyjnych
4.2. Metodyka pracy
2
2
3
6
6
8
5. Metodyka użycia miernika MPR-H2c jako defektoskopu
5.1. Pole rozproszone
5.2. Detekcja wady
10
10
12
14