UKŁADY ELEKTRONICZNE
Instrukcja do ćwiczeń laboratoryjnych
Badanie zasilacza niestabilizowanego
Laboratorium Układów Elektronicznych
Poznań 2008
Badanie zasilacza niestabilizowanego
________________________________________________________________________________________________________________________________________________________________
1. Cel i zakres ćwiczenia
Celem ćwiczenia jest zapoznanie studentów z problematyką otrzymywania napięcia stałego o
możliwie małej zawartości składowych zmiennych (tętnień) z napięcia przemiennego sieci
energetycznej. Zakres ćwiczenia obejmuje badanie charakterystyk obciążenia oraz tętnień różnych
typów zasilaczy i ocenę ich jakości.
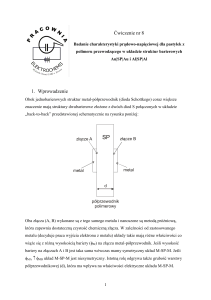
2. Wprowadzenie
2.1. Układy prostownicze
Większość zasilaczy sieciowych składa się z czterech podstawowych członów: transformatora,
prostownika i filtru oraz zespołu zabezpieczeń. Stosowane są również konstrukcje bez
transformatora, w których prostownik połączony jest bezpośrednio z siecią energetyczną.
W zależności od potrzeb wykorzystuje się zasilanie jednofazowe lub przy większych mocach
trójfazowe. W układach jednofazowych stosowane są układy prostownicze jednopołówkowe
wykorzystujące jedną diodę prostowniczą i dwupołówkowe – dwudiodowe i mostkowe (Graetza).
Układy jednopołówkowe stosowane są dla małych prądów i często dla wysokich napięć. Jedyną
ich zaletą jest wykorzystanie tylko jednej diody – ważne w układach wysokonapięciowych.
Podstawowymi wadami są natomiast częstotliwość tętnień równa częstotliwości sieci
zasilającej (50 Hz) oraz duże obciążenie transformatora, zwłaszcza przy typowym dla tego układu
obciążeniu prostownika pojemnością. Powoduje to niską sprawność i trudności z późniejszą
filtracją tętnień (składowej zmiennej napięcia wyjściowego). Również dioda musi mieć wysokie
napięcie wsteczne UR określone wzorem:
U R ≥ 2 2U we
(1)
gdzie Uwe to napięcie na wejściu prostownika. Przykładowo dla prostownika zasilanego
bezpośrednio z napięcia sieciowego 230 V teoretycznie wymagane minimalne napięcie wsteczne
diody wynosi 651 V, a praktycznie ze względu na przepięcia i tolerancję napięcia sieciowego
minimum 800 V.
Dla większych prądów stosowane są układy dwupołówkowe. Ich podstawową zaletą jest
dwukrotnie większa częstotliwość tętnień niż napięcia zasilającego. Układ dwudiodowy wymaga
transformatora z dzielonym uzwojeniem wtórnym, a napięcie wsteczne na diodach jest takie same,
jak w prostowniku jednopołówkowym. Uzwojenie wtórne transformatora musi być podobnie jak
poprzednio przewymiarowane prądowo ze względu na niekorzystny współczynnik kształtu prądu.
Układ ten obecnie jest rzadko stosowany, jedynie dla niskich napięć (do kilkunastu V) ze względu
na mniejszy niż w mostku spadek napięcia na diodach. Dawniej był często stosowany
w prostownikach lampowych.
Obecnie najczęściej stosowanym układem prostowniczym jest mostek Graetza. Zapewnia
on optymalne wykorzystanie mocy transformatora, a napięcie wsteczne na diodach wynosi połowę
napięcia w układzie jednopołówkowym i dwupołówkowym dwudiodowym. Wadą jego jest
konieczność użycia czterech diod, która obecnie nie ma większego znaczenia (istnieją scalone
mostki Graetza). Wyjątek stanowią układy wysokonapięciowe. Pewną niedogodnością jest też brak
wspólnej masy obwodu wejściowego i wyjściowego.
Osobną klasą układów prostowniczych są powielacze napięcia. Stosowane są głównie dla
otrzymywania wysokich napięć (rzędu kV), w innych zastosowaniach spotyka się czasem
podwajacze napięcia, na przykład układ Delona wyróżniający się częstotliwością tętnień 100 Hz
przy zasilaniu sieciowym. Jego budowa jest podobna do mostka Graetza, w którym dwie diody
zastąpiono kondensatorami.
2
__________________________________________________________________________________________________________________________________________________________
____
Układy elektroniczne – instrukcja do ćwiczeń laboratoryjnych
Badanie zasilacza niestabilizowanego
________________________________________________________________________________________________________________________________________________________________
Wszystkie powielacze poza złożoną na ogół budową posiadają istotną wadę – duży opór
wewnętrzny i pobór dużego prądu impulsowego w stosunku do wartości wyjściowego prądu
stałego. Dlatego też stosujemy je tylko w ostateczności.
2.2. Układy filtracyjne
Celem układów filtracyjnych jest zmniejszenie napięcia tętnień do akceptowalnej przez
użytkownika wartości. W badaniach najczęściej wykorzystujemy oscyloskopowy pomiar wartości
międzyszczytowej napięcia tętnień Utpp. Istotnym parametrem podawanym w danych technicznych
zasilacza jest współczynnik tętnień wt będący stosunkiem napięcia tętnień do wartości średniej
napięcia wyjściowego UDC. Definiuje go wzór:
wt =
U tpp
U DC
(2)
Inną definicją określającą w jest stosunek skutecznej wartości napięcia tętnień UAC do wartości
średniej napięcia wyjściowego UDC. Definiuje go wzór:
w=
U AC
U DC
(3)
Do filtracji wyprostowanego napięcia stosuje się filtry złożone z pojedynczego kondensatora,
dławika lub układów LC. Jedynie dla bardzo małych prądów znajdują zastosowanie układy RC.
W urządzeniach małej mocy (do kilkuset W) typowym rozwiązaniem jest zastosowanie
pojedynczego kondensatora lub baterii kondensatorów połączonych równolegle. W układach
wysokonapięciowych często stosuje się połączenie szeregowe kondensatorów, oczywiście
z odpowiednimi opornikami wyrównawczymi.
Wykorzystanie samego kondensatora do filtracji tętnień charakteryzuje się prostotą i niskim w
porównaniu do układu z dławikiem ciężarem, umożliwia też otrzymanie napięcia stałego o wyższej
wartości od wartości skutecznej napięcia zmiennego podawanego na prostownik. Podstawową wadą
takiego rozwiązania jest pobieranie przez prostownik prądu impulsowego o znacznie wyższym
natężeniu szczytowym od wyprostowanego prądu stałego. Powoduje to konieczność
przewymiarowania transformatora zasilającego i często diod prostowniczych. Ponadto napięcie
tętnień rośnie silnie ze wzrostem prądu obciążenia. Układ taki przy włączeniu pobiera duży prąd
rozruchowy, co zmusza przy większej mocy do stosowania odpowiednich ograniczników.
Układ filtracyjny z samym dławikiem stosowany jest rzadko, głównie w układach o dużych
prądach niewymagających dokładnej filtracji tętnień. W takim układzie napięcie tętnień maleje ze
wzrostem pobieranego prądu. Powyżej granicznego prądu obciążenia wyprostowane napięcie stałe
jest mniejsze od wartości skutecznej wejściowego napięcia zmiennego i mało zależy od prądu.
Również prąd pobierany przez prostownik charakteryzuje mniejsza wartość szczytowa
w porównaniu z układem z kondensatorem, co pozwala na lepsze wykorzystanie transformatora
zasilającego. Wadą układu filtracyjnego z dławikiem jest większy ciężar wynikający z obecności
dławika oraz konieczność zapewnienia pewnego minimalnego prądu obciążenia dla poprawnej
pracy. Najczęstsze jego zastosowania to urządzenia przemysłowe - spawarki, urządzenia do
ładowania akumulatorów itp.
Typowym rozwiązaniem dla filtracji tętnień w urządzeniach dużej mocy jest zastosowanie
układu LC z dławikiem od strony prostownika. Układ ten daje wyjątkowo małe tętnienia słabo
zależne od pobieranego prądu. Pozostałe jego cechy są podobne do układu z samym dławikiem.
W układzie tym czasami stosuje się zbocznikowanie dławika kondensatorem o pojemności dobranej
3
__________________________________________________________________________________________________________________________________________________________
____
Układy elektroniczne – instrukcja do ćwiczeń laboratoryjnych
Badanie zasilacza niestabilizowanego
________________________________________________________________________________________________________________________________________________________________
do rezonansu dla częstotliwości pierwszej (najsilniejszej) harmonicznej tętnień – typowo 100 Hz.
Daje to dalszą redukcję tętnień, o ile indukcyjność dławika jest wystarczająca i mało zależna od
zmian prądu obciążenia. Dodatkowy kondensator rezonansowy musi mieć pojemność dużo
mniejszą od pojemności kondensatora za dławikiem.
W typowych rozwiązaniach nie stosuje się filtru LC z wejściem od strony kondensatora, ani
filtru typu Π z dławikiem i dwoma kondensatorami ze względu na sumowanie się wad
poprzednich układów. Filtr typu Π jest rzadko stosowany z dodatkowym dławikiem tam, gdzie
należy wyjątkowo skutecznie odfiltrować tętnienia przy dużym prądzie obciążenia. W tym
przypadku układ zawiera dwa dławiki, a wyjście z prostownika połączone jest z pierwszym
dławikiem. Dalej podłączony jest filtr typu Π.
Uwaga:
Część schematów opisanych tu układów przedstawiono na rysunkach w dalszej części tej
instrukcji. Przekładnik prądowy konieczny jest tylko ze względu na stabilność procesu symulacji.
2.3. Podstawowe parametry charakteryzujące niestabilizowany układ zasilający
¾
¾
¾
¾
¾
¾
4
znamionowe napięcie zasilania,
znamionowe wartości napięcia wyjściowego i maksymalnego prądu obciążenia,
zależność napięcia wyjściowego od prądu obciążenia,
dynamiczna rezystancja wewnętrzna mierzona dla kilku prądów obciążenia (min. dla 3),
zależność wartości współczynnika tętnień od prądu wyjściowego,
częstotliwość tętnień.
__________________________________________________________________________________________________________________________________________________________
____
Układy elektroniczne – instrukcja do ćwiczeń laboratoryjnych
Badanie zasilacza niestabilizowanego
________________________________________________________________________________________________________________________________________________________________
3. Badania kształtu napięcia wyprostowanego dwupołówkowo
Zestaw pomiarowy – ważny dla wszystkich układów badawczych
•
•
•
•
•
układ symulacyjny badanego zasilacza,
przekładnik prądowy 1:1,
wirtualny oscyloskop,
wirtualne multimetry,
obciążenie regulowane w zakresie 1 ÷ 101 Ω.
Przebieg ćwiczenia
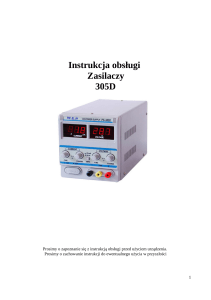
1. Uruchomić program MULTISIM. Złożyć układ (rys. 1) kierując się wskazówkami
prowadzącego.
Rys.1 Schemat układu pomiarowego – prostownik dwupołówkowy.
2. Zadeklarować przekładnię transformatora sieciowego 10:1, przekładnika 1:1. Indukcyjność
uzwojenia pierwotnego transformatora sieciowego 10H, przekładnika 1H, współczynnik
sprzężenia 1.
3. Ustawić multimetry XMM1 jako amperomierz AC, XMM2 jako amperomierz DC, XMM3
przełączać jako woltomierz DC i AC.
4. Zaobserwować zmiany sygnału wyjściowego przy zmianie wartości rezystancji R2 dla
wartości z początku, środka i końca zakresu zmian.
5. Odczytać i zapisać wskazania multimetrów. Oszacować współczynnik tętnień według
wzoru 3.
5
__________________________________________________________________________________________________________________________________________________________
____
Układy elektroniczne – instrukcja do ćwiczeń laboratoryjnych
Badanie zasilacza niestabilizowanego
________________________________________________________________________________________________________________________________________________________________
4. Badanie układu dwupołówkowego z kondensatorem
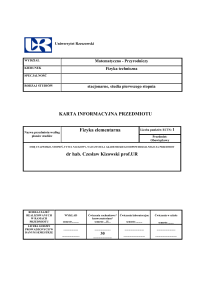
1. Połączyć układ pomiarowy zgodne ze schematem z rys. 2.
2. Parametry transformatora, przekładnika oraz multimetrów jak w ćwiczeniu (1).
3. Zmieniając wartość rezystora R2 od maksymalnej do minimalnej notować wskazania
multimetrów. Wykonać minimum 12 pomiarów.
4. Zaobserwować zmiany przebiegu na oscyloskopie. Wykonać kilka zrzutów ekranu dla
charakterystycznych sygnałów.
5. Zmienić pojemność kondensatora C1 na 10 mF. Powtórzyć pomiary.
6. Uzyskane wyniki pomiarowe przedstawić graficznie na dwóch wykresach. Na jednym z nich
podać zależność prądu multimetru XMM1, stosunku prądów multimetrów XMM1 do XMM2
i napięcia wyjściowego DC od prądu obciążenia (XMM2); na drugim zależność
współczynnika tętnień również od prądu obciążenia (XMM2). Wyniki podać dla obu wartości
kondensatorów.
Rys.2 Schemat układu pomiarowego – prostownik dwupołówkowy z pojemnością.
7. Wyliczyć rezystancję dynamiczną dla trzech wartości prądu obciążenia (min., max. i
pośredniej). Wyniki podać w tabelce dla obu kondensatorów.
6
__________________________________________________________________________________________________________________________________________________________
____
Układy elektroniczne – instrukcja do ćwiczeń laboratoryjnych
Badanie zasilacza niestabilizowanego
________________________________________________________________________________________________________________________________________________________________
5. Badanie układu dwupołówkowego z dławikiem
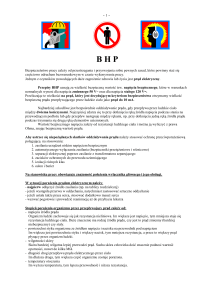
1. Połączyć układ pomiarowy zgodne ze schematem z rys. 3.
2. Parametry transformatora, przekładnika oraz multimetrów jak w ćwiczeniu (1).
3. Zmieniając wartość rezystora R2 od maksymalnej do minimalnej notować wskazania
multimetrów. Wykonać minimum 12 pomiarów.
4. Zaobserwować zmiany przebiegu na oscyloskopie. Wykonać kilka zrzutów ekranu dla
charakterystycznych sygnałów.
5. Uzyskane wyniki pomiarowe przedstawić graficznie na dwóch wykresach. Na jednym z nich
podać zależność prądu multimetru XMM1, stosunku prądów multimetrów XMM1 do XMM2
i napięcia wyjściowego DC od prądu obciążenia (XMM2); na drugim zależność
współczynnika tętnień również od prądu obciążenia (XMM2).
6. Wyliczyć rezystancję dynamiczną dla trzech wartości prądu obciążenia (min., max. i
pośredniej). Wyniki podać w tabelce.
Rys.3 Schemat układu pomiarowego – prostownik dwupołówkowy z indukcyjnością.
7
__________________________________________________________________________________________________________________________________________________________
____
Układy elektroniczne – instrukcja do ćwiczeń laboratoryjnych
Badanie zasilacza niestabilizowanego
________________________________________________________________________________________________________________________________________________________________
6. Badanie układu dwupołówkowego z filtrem LC
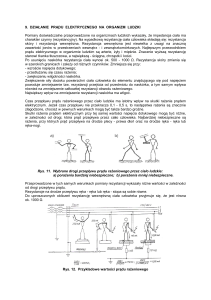
1. Połączyć układ pomiarowy zgodne ze schematem z rys.4.
Rys. 4. Schemat układu pomiarowego – prostownik dwupołówkowy z filtrem LC.
2. Parametry transformatora, przekładnika oraz multimetrów jak w ćwiczeniu (1).
3. Zmieniając wartość rezystora R2 od maksymalnej do minimalnej notować wskazania
multimetrów. Wykonać minimum 12 pomiarów.
4. Zaobserwować zmiany przebiegu na oscyloskopie. Wykonać kilka zrzutów ekranu dla
charakterystycznych sygnałów. Zaobserwować kształt tętnień i ich amplitudę. Porównać z
wynikami dla poprzednich układów.
5. Zmienić pojemność kondensatora C1 na 1mF. Powtórzyć pomiary.
6. Uzyskane wyniki pomiarowe przedstawić graficznie na dwóch wykresach. Na jednym z nich
podać zależność prądu multimetru XMM1, stosunku prądów multimetrów XMM1 do XMM2
i napięcia wyjściowego DC od prądu obciążenia (XMM2); na drugim zależność
współczynnika tętnień również od prądu obciążenia (XMM2). Wyniki podać dla obu wartości
kondensatorów.
7. Wyliczyć rezystancję dynamiczną dla trzech wartości prądu obciążenia (min., max. i
pośredniej). Wyniki podać w tabelce dla obu kondensatorów.
8
__________________________________________________________________________________________________________________________________________________________
____
Układy elektroniczne – instrukcja do ćwiczeń laboratoryjnych
Badanie zasilacza niestabilizowanego
________________________________________________________________________________________________________________________________________________________________
7. Sprawozdanie
W sprawozdaniu należy zamieścić:
•
wyniki pomiarów,
•
wykresy pomierzonych i obliczonych wartości,
•
tabelki z wyliczonymi parametrami,
•
zrzuty z ekranu reprezentatywnych przebiegów napięcia wyjściowego z oscyloskopu,
•
uzasadnienia otrzymanych wyników,
•
porównanie badanych układów między sobą,
•
wnioski.
Literatura
• M. Nadachowski, Z. Kulka: Analogowe Układy Scalone, WKiŁ, W-wa, 1980
• P. Horowitz, W. Hill: Sztuka Elektroniki, tom 1, WKiŁ, W-wa, 1995
• P. Górecki: Wzmacniacze operacyjne, WNT, 2002
• U.Tietze, Ch.Schenk: Układy półprzewodnikowe, WNT 2008
9
__________________________________________________________________________________________________________________________________________________________
____
Układy elektroniczne – instrukcja do ćwiczeń laboratoryjnych