Zeszyty Problemowe – Maszyny Elektryczne Nr 79/2008
127
Marcin Morawiec, Arkadiusz Lewicki, Zbigniew Krzemiński
Politechnika Gdańska, Gdańsk
PRZEKSZTAŁTNIK PRĄDU JAKO STEROWNIK W UKŁADACH
NAPĘDOWYCH Z SILNIKAMI INDUKCYJNYMI
CURRENT SOURCE CONVERTER AS A DRIVER IN A MOTOR SYSTEMS
Abstract: The circuits used for power conversion applied in drives with electric machines are classified into
two groups: voltage source inverters (VSI) and current source inverters (CSI). Application of the current
source inverter results in better properties of drive than application of voltage source inverter because there is
no output filter. The development of power electronics and especially the IGBTs, in which on/off-times are
very short, should produce perfect current sources in the future. Low power losses in CSI (tranzistors are
switched off without current) complete the above arguments. A control system for the induction motor fed by a
PWM CSI based on a multiscalar model is presented in the paper. The current source inverter topology is
presented. The vector model of the induction motor fed by CSI with output capacitors of inverter is presented
in the paper. The simplify pulse width modulation (PWM) is showed. The place voltage and current
measurements are showed. Properties of the sensorless control systems are compared and results of
simulations are presented. The investigation will be carried out on 5,5kW experimental drive.
1. Wstęp
W początkowej fazie rozwoju energoelektroniki
i maszyn elektrycznych popularne były napędy
z wykorzystaniem tyrystorowych falowników
prądu zasilających silniki synchroniczne komutowane elektronicznie (pierwsze układy napędowe były oparte na strukturach z falownikiem prądu – około 1930r.). Tyrystorowe
układy przekształtnikowe oferowały niezbyt
dobre właściwości ze względu na długie czasy
wyłączania. Układy te charakteryzowały się
znaczną
zawartością
harmonicznych
w przebiegach prądu stojana i dlatego stopniowo wprowadzano alternatywne rozwiązania
– falowniki napięcia.
Współczesne przekształtnikowe układy napędowe z silnikiem indukcyjnym buduje się
z wykorzystaniem falownika napięcia lub
prądu. Od chwili wynalazku tyrystora popularne stały się układy napędowe, w których silnik zasilany był z tyrystorowego przekształtnika.
W przekształtnikach tego typu stosowano naturalną komutację zaworów. Źródłem regulowanego napięcia był prostownik sieciowy z układem przerywacza lub tyrystorowy przekształtnik sieciowy, gwarantujący zwrot energii do
sieci zasilającej. Obecne tendencje rozwoju napędów elektrycznych zmierzają do otrzymania
układów o dobrej jakości. Zastosowanie źródeł
prądowych do sterowania maszynami elek-
trycznymi zapewnia lepsze właściwości napędowe niż w przypadku źródeł napięcia, w których może zaistnieć potrzeba stosowania dodatkowego filtru pasywnego na wyjściu falownika.
W literaturze i przemyśle znajdują zastosowanie układy napędowe z falownikiem prądu zasilającym silnik indukcyjny ze sterowaniem
opartym na metodzie orientacji układu współrzędnych względem wektora pola (FOC). Sterowanie takie polega na stabilizacji prądu
w obwodzie pośredniczącym. Zmiennymi sterującymi w tych układach sterowania są składowe prądu wyjściowego z falownika. Sterowanie, w którym zmienną sterującą jest prąd
wyjściowy falownika można nazwać sterowaniem prądowym silnika indukcyjnego zasilanego z falownika prądu. Inną metodą sterowania silnikiem indukcyjnym zasilanym z falownika prądu jest sterowanie, w którym zmiennymi sterującymi są napięcie w obwodzie pośredniczącym oraz poślizg silnika. Sterowanie
to można nazwać sterowaniem napięciowym
silnika indukcyjnego zasilanego z falownika
prądu, ponieważ zmienną sterującą jest napięcie
w obwodzie pośredniczącym. Układy sterowania oparte na sterowaniu napięciowym są mało
znane w literaturze. W kolejnych rozdziałach
referatu przedstawione będzie sterowanie napięciowe oparte na sterowaniu multiskalarnym.
Sterowanie to było opisywane m.in. w [1–2, 4].
128
Zeszyty Problemowe – Maszyny Elektryczne Nr 79/2008
2. Topologia przekształtnika prądu
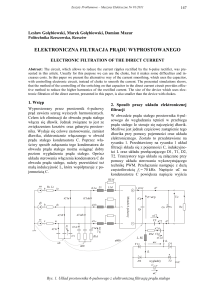
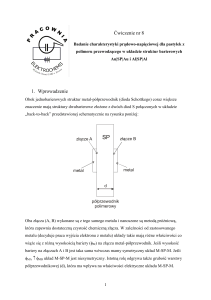
Schemat układu napędowego z silnikiem indukcyjnym zasilanym z falownika prądu przedstawiono na rys. 1. W obwodzie pośredniczącym znajduje się dławik o indukcyjności kilku
mili henrów (około 10 mH) minimalizujący tętnienia prądu id. Na wyjściu falownika – do faz
silnika podłączone są kondensatory wyjściowe
(20 µF). Na wejściu układu są kondensatory
wejściowe (20 µF). Regulowane źródło napięcia ed może stanowić układ z przerywaczem lub
przekształtnikiem sieciowym. Parametry układu
falownika (indukcyjność dławika oraz kondensatory na wejściu i wyjściu) powinny być odpowiednio dobrane, aby zapewnić małe tętnienia prądu w obwodzie pośredniczącym oraz
niewielkie współczynniki odkształcenia prądów
i napięć silnika (THDi i THDu).
minimalizacja poszczególnych współczynników, a tym samym dążenie do redukcji wielkości i ciężaru przekształtnika prądu. Zwiększenie
pojemności wejściowej falownika sieciowego
powoduje wzrost mocy biernej w układzie,
dlatego pojemność wejściowa powinna być tak
dobrana, aby przy odpowiednim sterowaniu falownikiem sieciowym zagwarantować kompensację mocy biernej czyli (cosϕ≈1) oraz spełniać
przyjęte wartości progowe THDi_sieć i THDu_sieć.
Wartości progowe określa się zgodnie z normą
EN 61000-3-4:1998. Na rys. 3 – 5 pokazano
„optymalne” wartości indukcyjności dławika
oraz pojemności kondensatorów wejściowych
i wyjściowych dla wybranych silników o mocy
od 4 do 75 kW. Indukcyjność dławika oraz pojemność kondensatorów wyjściowych dobrano
zgodnie z [1-2, 4].
Rys. 1. Struktura przekształtnika prądu
Rys. 2. Algorytm doboru pojemności wejściowej
Pn[kW]
2.1 Dobór parametrów przekształtnika prądu
Parametrami układu przekształtnika prądu są
pojemności wejściowa CL i wyjściowa CM oraz
indukcyjność dławika w obwodzie pośredniczącym Ld. Parametry falownika prądu tj. indukcyjność dławika oraz pojemność wyjściową
dobrano zgodnie z algorytmem przedstawionym
w [1-2, 4]. Pojemność wejściową CL przekształtnika prądu można dobrać w podobny
sposób, jak w przypadku pojemności wyjściowej, korzystając z algorytmu z rys. 2. Metoda
polega na doborze CL na podstawie symulacji
komputerowej przekształtnika sieciowego bądź
całego przekształtnika prądu.
Ustala się początkową wartość pojemności wejściowej, a następnie dokonuje się pomiaru
współczynników odkształcenia napięcia i prądu
na wejściu. Pomierzone współczynniki
THDu_sieć oraz THDi_sieć porównuje się
z wartościami zadanymi (progowymi). Wartości progowe określa się na wstępie przed uruchomieniem symulacji i zwykle w taki sposób
aby THDi_sieć oraz THDu_sieć było jak najmniejsze. Zadaniem proponowanego algorytmu jest
80
75
70
65
60
55
50
45
40
35
30
25
20
15
10
5
0
0,0
1,4 mH
1,8 mH
4,5 mH
6 mH
8 mH
9,5 mH
10 mH
2,5
5,0
7,5
12,8 mH
15 mH
16,5 mH
22,6 mH
10,0 12,5 15,0 17,5 20,0 22,5 25,0
Ld [mH]
Rys. 3. Indukcyjność dławika dla Pn od 4-75kW
Zeszyty Problemowe – Maszyny Elektryczne Nr 79/2008
Pn [kW]
145 µF
75
70
65
60
55
50
45
40
35
30
25
20
15
10
5
108 µF
90 µF
60 µF
45 µF
38 µF
32 µF
23 µF
16 µF
12 µF
9 µF
Wektory aktywne oznaczono od I1 do I6 natomiast I7 – I9 to wektory pasywne. Każdemu
wektorowi odpowiada inna konfiguracja załączanych łączników. Zgodnie z [1, 3] otrzymuje
się następujące czasy zadawania wektorów aktywnych:
I nα ⋅ I nβ ( i + 1 ) − I nβ ⋅ I nα ( i + 1 )
t1 =
,
I nα ( i ) ⋅ I nβ ( i + 1 ) + I nβ ( i ) ⋅ I nα ( i + 1 )
t2 =
10 20 30 40 50 60 70 80 90 100 110 120 130 140 150
CM [µF]
Rys. 4. Wartości pojemności wyjściowej CM dla
silników o mocy 4-75 kW
Rys. 5. Wartości pojemności wejściowej CL dla
silników o mocy 5,5-75 kW
2.2 Sterowanie tranzystorami falownika prądu
W układzie eksperymentalnym wykorzystano
algorytm modulacji szerokości impulsów
przedstawiony min. w [1, 3]. W falowniku
prądu dozwolone są stany zwarcia w gałęzi falownika. Występuje sześć stanów aktywnych
oraz trzy stany pasywne. Stany łączników falownika prądu oznaczono za pomocą wektora
przestrzennego i pokazano na płaszczyźnie (αβ)
rys. 6.
129
− I nα ⋅ I nβ ( i ) + I nβ ⋅ I nα ( i )
I nα ( i ) ⋅ I nβ ( i + 1 ) + I nβ ( i ) ⋅ I nα ( i + 1 )
oraz pasywnych:
t0 = Timp − ( t1 + t2 ),
,
gdzie t0 – czas wektorów pasywnych, t1, t2 –
czas wektorów aktywnych oraz Iα,β – składowe
wektorów aktywnych w układzie prostokątnym
(αβ), (indeks – i oznacza numer wektora aktywnego, n – numer sektora).
Poszczególne wektory aktywne i pasywne zadaje się w następującej kolejności: P1, A1, A2,
P2, A2, A1, P3 odpowiednio na czasy t0/2, t1, t2,
t0/2 oraz t0/2, t2, t1, t0/2, gdzie: P-wektor pasywny, A-wektor aktywny. Zmodyfikowaną sekwencję załączeń łączników przedstawiono
w [1, 3].
Podany powyżej sposób modulacji szerokości
impulsów bazuje na założeniu, że falownik jest
idealnym, bezstratnym komutatorem prądu płynącego w obwodzie pośredniczącym na prąd
przemienny płynący do kondensatorów wyjściowych i faz silnika.
Podobnie jak powyżej sterowany jest przekształtnik sieciowym. Czasy załączeń są postaci:
unα ⋅ I nβ ( i + 1 ) − unβ ⋅ I nα ( i + 1 )
t1s =
,
U sieć ( I nα ( i ) ⋅ I nβ ( i + 1 ) + I nβ ( i ) ⋅ I nα ( i + 1 ))
t2 s =
−unα ⋅ I nβ ( i ) + unβ ⋅ I nα ( i )
U sieć ( I nα ( i ) ⋅ I nβ ( i + 1 ) + I nβ ( i ) ⋅ I nα ( i + 1 ))
t0 s = Timp − ( t1s + t2 s ),
gdzie: unα,β – składowe napięcia zadanego sieci,
Usieć – moduł napięcia sieci, ts1, ts2, t0s – czasy
aktywne i pasywny.
3. Sterowanie silnikiem indukcyjnym zasilanym przekształtnikiem prądu
Rys. 6. Wektory przestrzenne na płaszczyźnie
(αβ )
W układzie eksperymentalnym zastosowano
sterowanie multiskalarne silnikiem indukcyjnym zasilanym z falownika prądu. Sterowanie
to przedstawiono min. w [1 – 2, 4].
,
Zeszyty Problemowe – Maszyny Elektryczne Nr 79/2008
130
ωr
ψˆ ry ψˆ rx
Rys. 7. Schemat blokowy multiskalarnego układu regulacji z obserwatorem prędkości kątowej
Sterowanie multiskalarne gwarantuje odsprzężenie dwóch torów regulacji: prędkości i strumienia oraz wyodrębnienie podsystemów:
elektromechanicznego i elektromagnetycznego.
Schemat blokowy układu regulacji przedstawiono na rys. 7. Sygnały zadane do bloku regulatorów są porównywane z wartościami mierzonymi bądź odtwarzanymi z obserwatora
strumienia i prędkości. Sygnałami zadanymi są
prędkość kątowa wirnika (ς11) oraz kwadrat
strumienia wirnika (ς21). Zmienne multiskalarne
są postaci [1, 2]:
ς11 = ωr ,
ς12 = −idψ ry ,
2
rx
2
ry
ς 21 = ψ + ψ ,
ς 22 = idψ rx ,
gdzie ς11 jest prędkością kątową wirnika, ς12 jest
zmienną proporcjonalną do momentu elektromagnetycznego, ς21 jest kwadratem strumienia
skojarzonego wirnika, ς22 jest iloczynem skalarnym wektorów strumienia wirnika i prądu w
obwodzie pośredniczącym.
Na podstawie zmiennych multiskalarnych oraz
modelu matematycznego silnika indukcyjnego
zasilanego z falownika prądu otrzymuje się zależności określające sterowania silnikiem za
pomocą falownika prądu, czyli napięcie ed
w obwodzie pośredniczącym oraz poślizg si
zdefiniowane następująco:
ψ ry v1 −ψ rx v2
ed = − Ld ⋅
,
(ψ rx2 + ψ ry2 )
si =
ψ rx v1 + ψ ry v2
,
id ⋅ (ψ rx2 + ψ ry2 )
gdzie sygnały v1 i v2 pozyskano z bloku transformacji i odsprzężeń natomiast prąd id jest
mierzony [1 – 2, 4].
4. Symulacja układu przekształtnika
prądu zasilającego silnik indukcyjny
W celu weryfikacji zaproponowanych algorytmów sterowania przeprowadzono symulację
numeryczną układu napędowego z przekształtnikiem sieciowym i falownikiem prądu. Na
rys. 8 przedstawiono przebieg prądu wyjściowego if z modułu tranzystorowego falownika
prądu.
j .w.
0, 6
0, 4
0, 2
If
- 0,2
- 0, 4
- 0, 6
0
5
10
15
Czas [ ms]
20
Rys. 8. Przebieg prądu wyjściowego if
25
30
Zeszyty Problemowe – Maszyny Elektryczne Nr 79/2008
131
Rys. 13. Nawrót od prędkości -0.7 do 0.7 j.w.
Rys. 9. Rozruch silnika do prędkości 0.7 j.w.
3,33kHz
FFT
Napięcie na
kondensatorach
Rys. 10. Nawrót od prędkości 0.7 do -0.7 j.w.
Na rys. 9 i 10 pokazano rozruch silnika indukcyjnego do prędkości 0.7 oraz nawrót.
Rys. 14. Napięcie na kondensatorach wyjściowych oraz FFT napięcia
Prąd sieci
5. Wyniki eksperymentalne
Badania eksperymentalne przeprowadzono na
silnikach małej mocy 1,5kW oraz 5,5kW obciążonych silnikiem prądu stałego.
Napięcie
sieci
Rys. 15. Przebiegi prądu i napięcia sieci
Rys. 11. Rozruch silnika do prędkości 0.7 j.w.
FFT
3,33kHz
Prąd sieci
Rys. 12. Nawrót silnika od 0.7 do -0.7 j.w.
Rys. 16. Przebieg prądu sieci i FFT
132
Zeszyty Problemowe – Maszyny Elektryczne Nr 79/2008
Rys. 17. Pomiar prądu id w obwodzie pośredniczącym przy zastosowanej metodzie przełączania tranzystorów w rozdz. 2.2.
Na rys. 17 przedstawiono miejsca pomiaru
prądu id przy zastosowanej metodzie modulacji
szerokości impulsów (rozdz. 2).
Na rys. 18 pokazano napięcie tranzystora, który
nie jest przełączany w czasie okresu impulsowania. Częste zmiany sekwencji tranzystorów,
a tym samym przeładowań pojemności złącz
diod i tranzystorów i innych pasożytniczych
pojemności w układzie, powoduje wymuszenie
przepływu niewielkiego prądu w gałęziach nie
załączonych elementów. Rezonansowe drgania
prądu powodują cykliczne doładowania napięcia na nie przełączanych tranzystorach rys. 18.
Zastosowanie MSI z rozdz. 2 powoduje minimalizacje efektu rezonansu rys. 19. Problematykę rezonansu w falownikach prądu szczegółowo wytłumaczono w [1, 4].
6. Podsumowanie
Rys. 18. Przepięcia na nie przełączanym tranzystorze w przekształtniku prądu.
Rys. 19. Zmniejszenie przepięć na tranzystorach
– metoda polegająca na przełączaniu wszystkich tranzystorów w jednym cyklu impulsowania.
Na rys. 11 przedstawiono rozruch silnika do
prędkości 0.7 j.w. Na rys. 12 i 13 nawroty silnika od prędkości 0.7 do -0.7 j.w. Na rys. 14
przedstawiono FFT napięcia na kondensatorach
wyjściowych oraz sinusoidalne napięcia na
kondensatorach. Na rys. 15 i 16 pokazano przebiegi prądu i napięcia na kondensatorach wejściowych CL (sieć).
W referacie przedstawiono sterowanie maszyną
indukcyjną zasilaną falownikiem prądu.
Główną zaletą falownika prądu są sinusoidalne
napięcia i prądy na wyjściu o bardzo niewielkim
współczynniku
odkształcenia
(THDu=2,3%, THDi=0,99%) oraz prosta konstrukcja przekształtnika dwukierunkowego (nie
wymaga stosowania połączeń typu bus-bar,
kondensatorów o dużej pojemności oraz deadtime przy sterowaniu tranzystorami, brak dławików na wejściu przekształtnika sieciowego).
Do wad przekształtników prądu należy zaliczyć
przepięcia na tranzystorach, bardziej skomplikowany
algorytm
sterowania
maszyną
i trudności z dostępnością na rynku tranzystorów z diodą szeregową typu revers-blocking
przystosowanych na prądy większe od 50 A.
Przekształtnik prądu wydaje się być korzystniejszym rozwiązaniem jako sterownik do zasilania maszynami indukcyjnymi, szczególnie
pod względem ekonomicznym do zastosowań
w przemyśle.
7. Literatura
[1] Głąb (Morawiec) M.: Bezczujnikowe sterowanie
maszyną indukcyjną zasilaną z falownika prądu,
Rozprawa doktorska, Gdańsk 2007.
[2] Morawiec M., Krzemiński Z. Lewicki A.: Zmodyfikowane sterowanie silnikiem indukcyjnym zasilanym z falownika prądu, SENE 2007.
[3] Lewicki A., Morawiec M.: Modulacja szerokości
impulsów w falownikach prądu, SENE 2007.
[4] Głąb (Morawiec) M. i inni.: Multiscalar control
of induction motor supplied by CSI, PCIM 2007.