Część 1
2. PRACA SIŁ WEWNĘTRZNYCH
1
2.
2. PRACA SIŁ WEWNĘTRZNYCH
2.1. Wstęp
Na wstępie przypomnijmy, że gdy przemieszczenie danego elementu jest funkcją działającej nań siły
Δ = f(P), to praca siły na tym przemieszczeniu jest równa:
1
L= ⋅P⋅
2
(2.1)
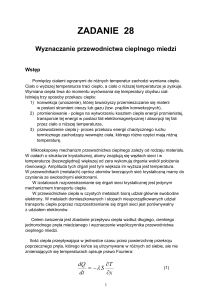
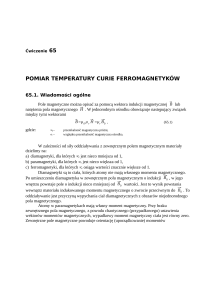
W przekroju pręta obciążonego siłami zewnętrznymi występują naprężenia normalne σ, o rozkładzie jak
na poniższych wykresach.
σN
σ1
x
hg
σ2
y
z
(σ)
x
+
=
hd
σg
σN
σd
(σN)
(σM )
naprężenia stałe
naprężenia zmienne
na wysokości przekroju
Rys. 2.1. Naprężenia normalne w przekroju pręta obciążonego siłami zewnętrznymi
Poczyniono założenia dotyczące pręta: materiał pręta jest jednorodny, izotropowy, pręt jest
pryzmatyczny (prostoliniowy o stałym przekroju), rozkład materiału w pręcie jest ciągły.
Zgodnie z zasadą superpozycji skutków możemy stwierdzić, że wykres naprężeń normalnych σ jest
sumą dwóch składowych: σN – naprężenia normalnego od siły podłużnej i σM – naprężenia normalnego od
momentów zginających. Układamy proporcje:
h g hd
=
g d
d =
hd
⋅
hg g
1 = N − g
2 = N d
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
2. PRACA SIŁ WEWNĘTRZNYCH
2
2 − 1 = d g
2 − 1 =
hd
h
⋅ g g = g 1 d
hg
hg
z których otrzymujemy wzory:
− 1
g =h g⋅ 2
hd h g
2 − 1
d =h d⋅
h d h g
2 − 1 1 ⋅h d 2 ⋅h g
N = 1 d = 1 h g⋅
=
hd h g
h d h g
2.2. Praca sił normalnych
Siła normalna (podłużna) N, to algebraiczna suma rzutów wszystkich sił działających po jednej stronie
przekroju na kierunek osi pręta.
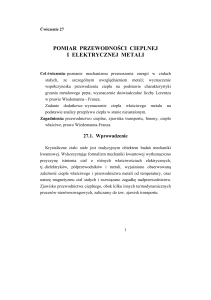
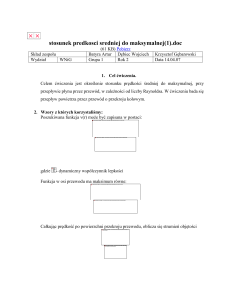
Znakowanie siły normalnej – siłę normalną przyjmujemy jako dodatnią (N>0), wtedy gdy powoduje ona
rozciąganie pręta.
N>0
N<0
rozciąganie
ściskanie
Rys. 2.2. Zasada znakowania sił normalnych
Działanie siły podłużnej w pręcie powoduje powstanie w dowolnym przekroju prostopadłym do osi
pręta, dostatecznie odległym od punktu przyłożenia siły (zasada de Saint-Venanta) naprężeń normalnych.
Tak więc siła normalna N, to inaczej suma naprężeń normalnych na powierzchni całego przekroju:
N =∫ N⋅dA
A
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
(2.2)
AlmaMater
Część 1
2. PRACA SIŁ WEWNĘTRZNYCH
3
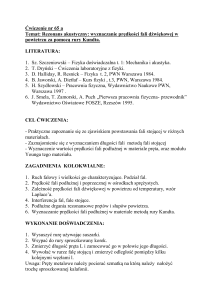
N
σN - naprężenia
równomiernie
rozłożone
Rys. 2.3. Rozkład naprężeń w pręcie rozciąganym
Ponieważ σN jest stałe na powierzchni całego przekroju, to:
N = N⋅∫ dA= N⋅A
(2.3)
A
N=
N
A
(2.4)
Skutkiem działania siły normalnej jest odkształcenie pręta, przejawiające się w przemieszczeniu przekrojów
wzdłuż kierunku działania siły. Przekroje pręta po odkształceniu pozostają płaskie i prostopadłe do jego osi.
Jeżeli wytniemy myślowo odcinek pręta o długości ds (dx), to pod wpływem działania siły N wydłuży
się on o odcinek Δds.
Zależność fizyczną pomiędzy odkształceniem ε i naprężeniem σ została sformułowana przez Hooke'a –
odkształcenie jest wprost proporcjonalne do naprężenia, które je spowodowało:
1
= ⋅
E
(2.5)
gdzie E to moduł Younga.
Poza tym odkształcenie pręta jest równe wydłużeniu względnemu (przyrost długości Δl do długości l):
=
l
l
(2.6)
Korzystając z zależności (2.4) i (2.6) oraz prawa Hooke'a można zapisać:
N =
ds
ds
N =E⋅ N
ds
N
=E⋅
A
ds
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
2. PRACA SIŁ WEWNĘTRZNYCH
4
ds
N =EA⋅
ds
ds=
N
⋅ds
EA
(2.7)
Praca siły normalnej w przekroju (część pracy wykonanej na odcinku ds):
1
1
N
1 N2
dL N = ⋅N⋅ ds= ⋅N⋅ ⋅ds= ⋅ ⋅ds
2
2
EA
2 EA
(2.8)
Całkowita praca LN siły normalnej w pręcie o długości l:
l
LN =
1 N2
∫ ⋅ds
2 0 EA
(2.9)
A przy dowolnym rozkładzie sił normalnych, gdy N jest funkcją długości:
l
LN =
2
1 N x
⋅dx
∫
2 0 EA
(2.10)
2.3. Praca momentów zginających
Moment zginający w dowolnym przekroju pręta jest równy sumie momentów od wszystkich sił
działających na część pręta oddzieloną tym przekrojem, policzonych względem środka tego przekroju.
M =∫ M⋅z⋅dA
A
(2.11)
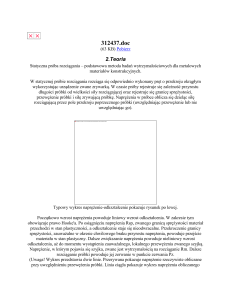
Momenty zginające znakuje się umownie: moment przyjmujemy jako dodatni, gdy rozciąga dolne włókna.
M>0
M<0
Rys. 2.5. Zasada znakowania momentów zginających
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
2. PRACA SIŁ WEWNĘTRZNYCH
dA
M
5
x
z
σM
y
z
Rys. 2.6. Moment zginający i naprężenia w przekroju pręta
Mówimy, że pręt jest poddawany czystemu zginaniu, gdy przekroje doznają tylko obrotów (prawo
płaskich przekrojów), a włókna pręta leżące na osi ciężkości nie ulegają wydłużeniu.
Naprężenia powstałe od momentu zginającego powodują ściskanie części włókien i rozciąganie
pozostałych.
σg - ściskanie
hg
y
h
M
z
x
σ
hd
σd - rozciąganie
z
Rys. 2.7. Naprężenia w pręcie zginanym
Korzystając z zależności geometrycznych (twierdzenie Talesa) otrzymujemy:
z
=
d hd
=
d
⋅z
hd
(2.12)
A zatem możemy zapisać:
M =∫
A
d 2
⋅z ⋅dA
hd
(2.13)
dalej po wyłączeniu stałych przed znak całkowania:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
2. PRACA SIŁ WEWNĘTRZNYCH
M=
gdzie
∫ z 2⋅dA
A
6
d
∫ z 2 ⋅dA ,
hd A
(2.14)
to moment bezwładności względem osi y, który oznaczamy symbolem Jy. Wobec tego:
M=
d
⋅J y = ⋅J y
hd
z
=
M
⋅z ,
Jy
(2.15)
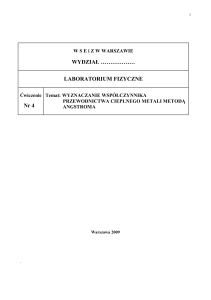
Wycinek pręta o długości ds podlega czystemu zginaniu.
biegun
chwilowego
obrotu
ρ – promień
krzywizny
ds
ρ=
dφ
dφ
2
dφ
2
Δdsd
2
ds
z
hd
Δdsd
2
Rys. 2.8. Czyste zginanie wycinka pręta ds
Zgodnie z rys. 2.8 układamy proporcje:
d ds d
=
2
2 hd
d =
ds d ds
=
hd
z
(2.16)
Analogicznie jak w przypadku działania siły normalnej zależność pomiędzy odkształceniem, a wydłużeniem
jest następująca:
M =
ds
ds
ds=M⋅ds
(2.17)
Podstawiając powyższe równanie do zależności (2.16) i korzystając z prawa Hooke'a M = / E otrzymujemy
wzór na zmianę kąta przy czystym zginaniu:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
2. PRACA SIŁ WEWNĘTRZNYCH
d =
M⋅ds
=
⋅ds
z
E⋅z
d =
7
M
⋅ds
E⋅J y
(2.18)
Element pracy (wykonany na odcinku ds) momentu zginającego działającego na obrocie wynosi:
1
1 M2
dL M = ⋅M⋅d = ⋅
⋅ds
2
2 EJ y
(2.19)
Całkowita praca momentu zginającego w pręcie o długości l:
l
LM =
1 M2
∫ ⋅ds
2 0 EJ y
(2.20)
A gdy moment jest funkcją długości:
l
LM =
2
1 M x
⋅dx
∫
2 0 EJ y
(2.21)
M
Jeżeli ρ to promień krzywizny, a d = EJ ⋅ds , to na podstawie zależności (2.16) otrzymuje się:
y
d 1
M
= ==
ds
EJ y
(2.22)
gdzie χ to odwrotność promienia krzywizny.
2.4. Praca sił poprzecznych
Siła poprzeczna (tnąca) T, to algebraiczna suma rzutów wszystkich sił działających po jednej stronie
przekroju, na kierunek prostopadły do osi pręta.
Zasada znakowania – siłę poprzeczną przyjmujemy jako dodatnią, gdy obraca ona odciętą przez
przekrój cześć pręta w prawo (zgodnie z ruchem wskazówek zegara).
Innymi słowy siła poprzeczna Txz to suma wszystkich naprężeń stycznych τxz na powierzchni całego
przekroju.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
2. PRACA SIŁ WEWNĘTRZNYCH
T xz =∫ xz⋅dA
xz =
A
8
T xz⋅S y z
J y⋅b z
(2.23)
b(z) - szerokość przekroju w odległości z od osi obojętnej,
Jy
- moment bezwładności względem osi y dla całego przekroju,
Sy(z) - moment statyczny części przekroju poza współrzędną z względem osi obojętnej,
Indeks pierwszy oznacza płaszczyznę, na której działa siła T, natomiast drugi, kierunek jej działania.
τxz
x
y
z
dh = ΔdsT
γ xz
dA
z
z
b(z)
γ xz
ds
kąt odkształcenia
postaciowego
Rys. 2.9. Odkształcenia spowodowane działaniem siły poprzecznej
Rozpatrujemy elementarną (nieskończenie małą) pracę wykonaną na powierzchni sprowadzonej do
punktu (pole dA) i na długości wycinka ds (dx). Praca tak jak poprzednio wykonana jest na długości elementu
ds, jednak tym razem rozpatrujemy pracę ograniczoną do powierzchni dA, stąd rząd różniczki rośnie.
1
d 3 LT = ⋅dT⋅ dsT
2
uwzględniając =
G
(2.24)
:
dT = xz⋅dA
1
1 T xz⋅S y z T xz⋅S y z 1
d 3 LT = ⋅ xz⋅dA⋅ xz⋅ds=
⋅
⋅ ⋅dA⋅ds
2
2 J y⋅b z J y⋅b z G
T =T xz
d 3 LT =
2
1 T 2 A S y z
⋅ 2 ⋅ 2 ⋅dA⋅ds
2 GA J y b z
po dwukrotnym scałkowaniu po polu A:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
2. PRACA SIŁ WEWNĘTRZNYCH
dLT =
9
2
1 T2
A S z
⋅ 2 ∫ 2y ⋅dA ⋅ds
2 GA J y A b z
2
=
A S y z
⋅dA
∫
J 2y A b 2 z
(2.25)
gdzie κ to współczynnik ścinania.
W nawiązaniu do poprzednich rozdziałów (praca siły: N i M), przez analogię wyrażenie dLT można
zinterpretować jako pracę siły poprzecznej na uśrednionym przemieszczeniu wywołanym odkształceniem
postaciowym.
1
T
1
dLT = T⋅ ⋅⋅ds= T⋅ śr⋅ds
2 GA
2
T⋅ śr
= = śr
GA G
(2.26)
gdzie śr to uśrednione odkształcenie.
Całkowita praca sił tnących na długości pręta z uwzględnieniem współczynnika ścinania:
l
LT =
1 T2
∫ ⋅⋅ds
2 0 GA
(2.27)
A gdy siła T zmienia się na długości pręta:
l
2
1 T x
LT = ∫
⋅⋅dx
2 0 GA
(2.28)
2.5. Podsumowanie – praca sił wewnętrznych
Przyrost pracy wywołany przez siły wewnętrzne na przemieszczeniach przez siebie wywołanych dla
wycinka dx wynosi:
1
dLT = ⋅F⋅
2
1
dLT = ⋅F⋅⋅dx
2
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
(2.29)
AlmaMater
Część 1
2. PRACA SIŁ WEWNĘTRZNYCH
10
F - siła uogólniona,
Δ - przemieszczenie uogólnione,
Δ = δ·dx
gdzie:
δ – uogólnione odkształcenie.
{
N x
F x= M x
T x
{
ds N = N⋅dx
=⋅dx= ds M =d =⋅dx
dsT = śr⋅dx
(2.30)
Odkształcenia:
- liniowe =
N
EA
- kątowe =
M
EJ y
- postaciowe śr =
T
⋅
GA
Dla pręta całkowita praca sił wewnętrznych jest sumą prac wszystkich sił w pręcie:
l
LW =
l
l
2
2
2
1 M x
1 N x
1 T x
⋅dx ∫
⋅dx ∫
⋅⋅dx
∫
2 0 EJ y
2 0 EA
2 0 GA
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
(2.31)
AlmaMater