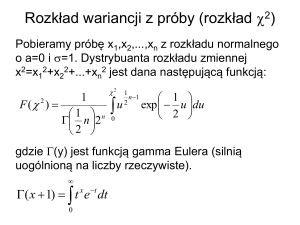
6. Metoda największej wiarygodności
6.1. Funkcja wiarygodności. Iloraz wiarygodności
Wiąże się to z problemem estymacji parametrów. Załóżmy, że jest i=1,..,p interesujących nas
parametrów i i tworzą one zbiór: λ λ1,..,λ p . Zbiór p parametrów określa gęstość
prawdopodobieństwa f f x; dla zmiennych losowych x x1 ,..xn .
Pojedyncze doświadczenie, pomiar wielkości x, oznacza pobranie próby o liczebności 1.
Załóżmy, że jedna z takich prób dała w wyniku x j . Temu pojedynczemu doświadczeniu
przypisujemy liczbę:
dP j f x j ; dx ,
która ma charakter prawdopodobieństwa a posteriori. Mówi ona po uzyskaniu wyniku,
jakie było prawdopodobieństwo uzyskania takiego właśnie wyniku, czyli uzyskania wartości
x j takiej, że xi j x j xi j dxi j , gdzie i=1,..,n.
Wykonajmy N niezależnych doświadczeń. Prawdopodobieństwo uzyskania wyniku
x1 , x2 ,..., x j ,..., x N
(seria N wyników, próba N-wymiarowa) dane jest iloczynem
prawdopodobieństw:
N
dP f x j ; dx
j 1
N
Iloczyn L f x j ; nosi nazwę funkcji wiarygodności.
j 1
Zauważmy: funkcja wiarygodności zdefiniowana jest przez gęstość prawdopodobieństwa a
posteriori f x j ; , jest funkcją próby x j , j=1,..,N, a wobec tego jest zmienną losową.
Czasami wiadomo, że rozpatrywana populacja parametrów może być należeć tylko do
jednego z dwóch zbiorów: 1 lub 2 (np. liczby parzyste i nieparzyste, rzut monetą).
Definiuje się wówczas iloraz wiarygodności:
,
f x ;
N
Q
f x j ; 1
j 1
N
j 1
j
który mówi "zbiór parametrów 1
jest Q razy bardziej
2
prawdopodobny niż zbiór 2 ".
Przykład. Rzucamy niesymetryczną monetą, o której wiemy, że może należeć do klasy A
(częściej wypada reszka: PO=1/3, PR=2/3) lub do klasy B (częściej wypada orzeł: PO=2/3,
2017-07-21
20
PR=1/3). Praktycznie oznacza to, że nie jesteśmy pewni po której stronie wybiliśmy orła – po
tej bardziej czy po tej mniej prawdopodobnej.
Próba składająca się z N=5 rzutów badaną monetą dała 1 raz orła i 4 razy reszkę.
Obliczamy funkcje wiarygodności LA,LB oraz iloraz wiarygodności Q:
LA
12 2 2 2
2 1 1 1 1
L
, LB
,Q A 8
3 3 3 3 3
3 3 3 3 3
LB
1 orzel
4 reszki
1 orzel
4 reszki
Wniosek: Q=8 razy bardziej prawdopodobne jest że moneta należy do klasy A niż do klasy B.
Z taką monetą możemy stawiać na orła.
6.2. Metoda największej wiarygodności
Największą ufnością obdarzymy ten zbiór parametrów , dla którego funkcja
N
wiarygodności L f x j ;
j 1
osiąga maksymalną wartość. Aby wyznaczyć położenie
maksimum należy 1-szą pochodną funkcji wiarygodności L względem parametru
przyrównać do zera. Różniczkowanie iloczynu jest niewygodne, zatem wprowadzamy
logarytm:
N
l ln L ln f x j ; , l nazywamy logarytmiczną funkcją wiarygodności. Położenia
j 1
maksimum dla l i L są identyczne. Problem wyznaczenia maksimum L sprowadzony został
do rozwiązania równania wiarygodności:
l
l
0; i 1,2,.., p - jest to układ p równań dla każdego z p parametrów .
λi
Przykład.
Wartość pewnego parametru możemy poznać drogą N-krotnego pomiaru. Jeśli pomiary
x j dokonywane są tym samym przyrządem, w tych samych warunkach i błędy mają rozkład
normalny, to możemy przyjąć, że najlepszym estymatorem wartości rzeczywistej jest średnia
arytmetyczna wyników:
N
x
j
j 1
N
Jeśli jednak pomiary dokonywane są z różną dokładnością (np. różne przyrządy), to nie
wszystkie są tak samo wiarygodne. Posłużymy się zatem funkcją wiarygodności i
wyznaczymy jej maksimum. Założymy, jak poprzednio, że błędy mają rozkład normalny o
średniej i wariancji j - różnej dla poszczególnych pomiarów x j . Pojedynczy pomiar to
2017-07-21
21
pobranie próby o liczebności 1 z rozkładu Gaussa o średniej i wariancji j . Zatem, dla
jednego pomiaru x j prawdopodobieństwo a posteriori uzyskania tego wyniku jest (zgodnie
ze znaną postacią funkcji gęstości prawdopodobieństwa dla rozkładu normalnego):
dP
j
x j λ
1
f x ;λ dx
exp
2σ 2j
2π σ j
j
2
dx
Dla N pomiarów mamy funkcję wiarygodności:
x j λ
1
L
exp
j 1 2π σ
2σ 2j
j
N
2
i jej logarytm:
1 N x j
l
const
2 j 1
2j
2
Równanie wiarygodności przyjmuje postać:
N
dl
x j
0
d j 1 2j
~
Rozwiązaniem tego równania jest estymator największej wiarygodności , który, na
podstawie powyższego równania, wynosi:
x j
2
~ j 1 j
N
1
2
j 1 j
N
Wynik najbardziej wiarygodny jest średnią ważoną z N pomiarów o różnych wariancjach.
Wagi są równe odwrotnościom wariancji. Druga pochodna d 2l / d2 j 2 0 , więc
istotnie znaleźliśmy maksimum.
Dla
j const
estymator największej wiarygodności staje się równy średniej
arytmetycznej wyników:
x j
2
~ j 1 j
N
1
2
j 1 j
N
2017-07-21
x j
2
1
j 1
N
N
2
N
j const
N
x
j
j 1
22
6.3. Nierówność informacyjna. Estymatory o minimalnej wariancji
~
Dobry estymator to taki dla którego wartość obciążenia Bλ wynosi zero dla każdej
~
~
liczebności próby oraz którego wariancja var 2 jest jak najmniejsza:
~
~
Bλ E λ 0 oraz σ 2 min
Często musimy szukać kompromisu pomiędzy wymaganiem dotyczącym braku obciążenia
~
~
B 0 oraz minimalnej wariancji 2 min . Wielkości Bλ i 2 związane są za
pomocą nierówności informacyjnej, zwanej nierównością Cramera-Rao:
~
1 Bλ
var σ 2
E l 2
2
Powyższe wyrażenie podaje związek pomiędzy obciążeniem parametru Bλ , wariancją
~
2 oraz informacją zawartą w próbie, wyrażoną przez E l 2 . Gdy obciążenie znika (lub
nie zależy od ), wyrażenie upraszcza się:
E1l
~
2
2
Funkcja informacyjna E l 2 , informacja próby ze względu na parametr - to wartość
średnia z kwadratu pochodnej logarytmicznej funkcji wiarygodności.
W przypadku wielowymiarowych ( λ λ1,..,λ p ) estymatorów nieobciążonych
( B 0 ) można dojść do następującej zależności:
T
~
~
cov
λ E λ λ M 1
l l T
2l
M E E
T
gdzie macierz M to macierz informacji, macierz informacyjna Fishera.
6.4. Prawo kombinacji błędów (uśrednianie błędów w kwadratach)
Powróćmy do problemu wielokrotnego pomiaru tej samej wielkości z różnymi
dokładnościami. Równanie wiarygodności o podanej wcześniej postaci:
N
dl
x j
0
d j 1 2j
Nieobciążony estymator największej wiarygodności:
2017-07-21
23
x j
2
~ j 1 j
N
ma również minimalna wariancję, która wynosi:
1
2
j 1 j
N
~
~ N 1
var 2 2
j 1
j
1
Ten ostatni wzór znany jest jako prawo kombinacji błędów lub uśrednianie błędów
w kwadratach. Można je także uzyskać przez zastosowanie prawa propagacji błędów w
~
stosunku do estymatora .
~
~
Jeśli utożsamimy z błędem oraz utożsamimy j z błędem j-tego pomiaru
x j , wówczas prawo kombinacji błędów przyjmuje znana ogólnie postać:
1
1
~ 1
...
2
2
2
x
x
x
2
n
1
1
2
~
~
Jeśli wszystkie pomiary mają takie same dokładności j , to oraz 2
przyjmą znane postaci:
~
~
λ x, 2 λ 2 / n .
6.5. Własności asymptotyczne funkcji wiarygodności
Własności:
~
1. Estymator wiarygodności jest asymptotycznie nieobciążony, tzn. jest nieobciążony dla
N .
2. Funkcja wiarygodności jest asymptotycznie normalna, tzn. jest normalna dla N .
Przypomnimy: funkcja wiarygodności L jest miarą prawdopodobieństwa, że wartość
prawdziwa 0 parametru jest równa:
~
~ ~
~
0
Skoro funkcja wiarygodności dąży asymptotycznie do rozkładu normalnego, powyższy
przedział można interpretować następująco:
Prawdopodobieństwo, że wartość prawdziwa 0 zawarta jest w przedziale
~
~
~
~
0 wynosi 68.3%.
W zastosowaniach praktycznych stosujemy tę interpretacje dla dużych, lecz skończonych, N.
2017-07-21
24
6.6. Jednoczesna estymacja kilku parametrów. Przedziały ufności
Rozważmy logarytmiczną funkcję wiarygodności dla p parametrów λ1,..,λ p , które
chcemy estymować równocześnie:
N
l x1 , x2 ,.., x N ; ln f x j ;
j 1
i rozwińmy ją w szereg Taylora w otoczeniu rozwiązania największej wiarygodności
~ ~ ~
~
1 , 2 ,.., p co daje:
p
l
~
~
k k
l l
k 1 k ~
λ
p
p
2l
1
~
~
l l m m .....wyrazy wyż szych rzędów
2 l 1 m1 l m ~λ
Zastosujemy uproszczenia i oznaczenia:
Zaniedbamy wyrazy wyższych rzędów.
Wszystkie pochodne cząstkowe
l
0
~
z definicji (estymator największej
wiarygodności został wyznaczony jako rozwiązanie równania powstałego z przyrównania
pochodnej do zera)
W rozwinięciu w szereg wyraz z podwójną sumą przedstawimy w zapisie macierzowym:
l l ~ 12 ~ S ~
T
S pxp
2l
2l
2
1
1
p
2l
2l
2
1 p p ~
Gdy N elementy macierzy S dla konkretnej próby możemy zastąpić odpowiednimi
wartościami oczekiwanymi:
2l
2l
E 2 E
1
1
p
B E (S pxp )
2
2
E l E l
2 ~
1 p
p
Powyższe spostrzeżenia prowadzą do następującej postaci funkcji wiarygodności:
2017-07-21
25
1
~
~T
~
ln L ln L B
2
~T
~
1
L const exp B
2
Wniosek: Funkcja wiarygodności ma postać p-wymiarowego rozkładu normalnego ze średnią
~
i macierzą kowariancji C równą odwrotności B: C B 1 .
~ ~
~
~
Zatem, wariancje var i estymatorów największej wiarygodności 1 , 2 ,.., p to
elementy z głównej przekątnej a elementy pozadiagonalne to kowariancje poszczególnych par
estymatorów:
C cij
~
~
cii var i 2 i
~ ~
c jk cov j , k
~ ~
cov j , k
~ ~
j ,k ~
~ - wspóczynn ik korelacji
j k
Podobnie jak w przypadku jednowymiarowym, pierwiastek kwadratowy z wariancji to
odchylenie standardowe:
~
~
i i cii
Podobnie jak w przypadku wielowymiarowego rozkładu normalnego (rozdział 3), w
przestrzeni parametrów 1 , 2 ,.., p , opisanych przez normalną (gaussowską) funkcję
~T
~
wiarygodności, określa się elipsoidę kowariancji z warunku B 1 .
Przykład
Wyznaczmy estymator największej wiarygodności dla wartości średniej 1 i odchylenia
standardowego 2 dla rozkładu normalnego.
Rozwiązanie. Funkcja wiarygodności dana jest wzorem:
x j λ
1
1
L
exp
2
j 1 λ
2
λ
2
π
2
2
N
2
, gdzie x j to jeden z wyników pomiaru wielkości,
której średnią chcemy znaleźć.
1 N x j λ1
l ln L
2 j 1
λ22
2
N ln λ2 const.
Następnie z układu równań wiarygodności:
2017-07-21
26
l
l
~
0,
0 otrzymujemy estymator wartości średniej 1 i estymator odchylenia
1
2
~
standardowego 2 :
1
~
1
N
N
x
to średnia arytmetyczna poszczególnych pomiarów,
j 1
x
N
~
2
j
j
~
2
1
j 1
N
Wyznaczmy jeszcze macierz kowariancji. Trzeba znaleźć 2-gie pochodne:
2l 2l
2l
~
~
, ich wartości dla 1 1 , 2 2 , utworzyć B i odwrócić:
,
,
2
2
1 2 1 2
~
22
0
C B 1 ... N ~2
0 2
2 N
Elementy diagonalne reprezentują błędy:
~2
2
N
~2
2
~
2
2N
~
1
Wielkości 1 i 2 nie są skorelowane – elementy pozadiagonalne C są zerowe.
2017-07-21
27