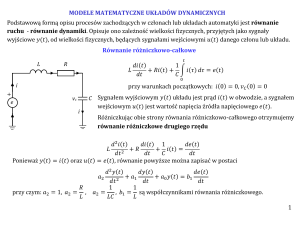
Podstawowe elementy liniowe
Własności statyczne i dynamiczne
Elementy liniowe klasyfikuje się najczęściej ze względu na ich własności
dynamiczne. Wyróżniamy sześć grup elementów podstawowych:
1. Bezinercyjne (proporcjonalne)
2. Inercyjne
3. Całkujące
4. Różniczkujące
5. Oscylacyjne
6. Opóźniające.
Własności statyczne określa charakterystyka statyczna, a własności
dynamiczne równanie różniczkowe, transmitancja operatorowa i
widmowa a także charakterystyki czasowe i częstotliwościowe.
Człon bezinercyjny (proporcjonalny)
Ogólna postać równania elementu bezinercyjnego jest następująca:
y=kx,
gdzie y – wielkość wyjściowa, x – wielkość wejściowa, k – współczynnik
proporcjonalności (wzmocnienia).
Transmitancja elementu bezinercyjnego jest równa współczynnikowi
wzmocnienia:
Y ( s)
G ( s)
k
X ( s)
Odpowiedzią na skok jednostkowy członu proporcjonalnego jest skok o
wartości k.
h(t)
k
1
t
0
Charakterystyki częstotliwościowe są linią prostą o stałym wzmocnieniu
z przesunięciem fazowym równym 0.
Przykłady realizacji członu proporcjonalnego:
a) dzielnik napięciowy
R1
R2
R2
G ( s) k
R1 R2
b) mnożenie przez stałą (wzmacniacz operacyjny)
R2
R1
+
R2
G( s) k
R1
Człon inercyjny I rzędu
Ogólna postać równania różniczkowego
pierwszego rzędu jest następująca:
elementu
dy
T
y kx
dt
Stąd wynika transmitancja:
k
G ( s)
Ts 1
gdzie: k – współczynnik wzmocnienia, T – stała czasowa [s]
inercyjnego
Odpowiedź na skok jednostkowy obliczamy na podstawie własności
przekształcenia Laplace’a, otrzymując:
k 1
k
k
1
Y (s) G(s) X (s)
Ts 1 s s (Ts 1) T s ( s 1 )
T
t
t
k
y (t ) T (1 e T ) k (1 e T )
T
Transmitancja widmowa jest następująca:
k
k (1 jT )
G( j )
jT 1 1 2T 2
Stąd
P ( )
k
1 2T 2
kT
Q ( )
1 2T 2
k
A( )
1 2T 2
( ) arctg T
Charakterystyki częstotliwościowe członu inercyjnego I rzędu wyglądają
następująco:
Przykładem układu inercyjnego I rzędu jest filtr dolnoprzepustowy RC, w
którym sygnałem wejściowym i wyjściowym jest napięcie, lub silnik
prądu stałego (lub indukcyjny 3-fazowy), w którym skokowe włączenie
zasilania jest sygnałem wymuszającym a wyjściem jest prędkość kątowa
wału silnika.
R
C
Człon całkujący idealny
Ogólna postać równania różniczkowego elementu całkującego idealnego
jest następująca:
dy
kx
dt
Stąd wynika transmitancja:
k
G (s)
s
gdzie: k – współczynnik wzmocnienia
W przypadku szczególnym (k ma wymiar odwrotności czasu), może zajść:
1
G (s)
Ts
Odpowiedź na skok jednostkowy obliczamy na podstawie własności
przekształcenia Laplace’a, otrzymując:
k1 k
Y ( s) G( s) X ( s)
2
ss s
y (t ) kt
Transmitancja widmowa jest następująca:
k
k
G ( j )
j
j
Stąd
P ( ) 0
Q ( )
A( )
k
k
( )
2
Charakterystyki częstotliwościowe członu całkującego idealnego
wyglądają następująco:
Przykładem układu całkującego jest układ zawierający idealny
kondensator C, przy czym sygnałem wejściowym jest prąd a wyjściowym
napięcie na kondensatorze.
C
C
R
+
1
G (s)
RCs
Człon całkujący rzeczywisty
Ogólna postać równania różniczkowego
rzeczywistego (z inercją) jest następująca:
elementu
d 2 y dy
T 2
kx
dt
dt
Stąd wynika transmitancja:
k
G( s)
s(Ts 1)
gdzie: k – współczynnik wzmocnienia, T – stała czasowa.
całkującego
Odpowiedź na skok jednostkowy obliczamy na podstawie własności
przekształcenia Laplace’a, otrzymując:
k
1
k
Y ( s) G( s) X ( s)
2
s(Ts 1) s s (Ts 1)
t
T
y (t ) kt kT (1 e )
Transmitancja widmowa jest następująca:
k
kT
k
G( j )
j
2 2
j (1 jT )
1 T
(1 2T 2 )
Stąd
P ( )
kT
1 T
k
Q ( )
(1 2T 2 )
k
A( )
1 2T 2
1
( ) arctg
arctg T
T
2
2
2
Charakterystyki częstotliwościowe członu całkującego rzeczywistego
wyglądają następująco:
Przykładem układu całkującego rzeczywistego jest układ filtru RC w
układzie , lub silnik obcowzbudny prądu stałego, w którym
wymuszeniem jest skok napięcia wirnika a wyjściem kąt obrotu wirnika.
R
C
Człon różniczkujący idealny
Ogólna postać równania różniczkowego elementu różniczkującego
idealnego jest następująca:
dx
yk
dt
Stąd wynika transmitancja:
G ( s) ks
gdzie: k – współczynnik wzmocnienia.
Odpowiedź na skok jednostkowy obliczamy na podstawie własności
przekształcenia Laplace’a, otrzymując:
1 ks
Y ( s) G( s) X ( s) ks k 1
s s
y (t ) (t )
Transmitancja widmowa jest następująca:
G ( j ) kj jk
Stąd
P( ) 0
Q( ) k
A( ) k
( )
2
Charakterystyki częstotliwościowe członu różniczkującego idealnego
wyglądają następująco:
Przykładem układu różniczkującego idealnego jest kondensator idealny
C , przy czym sygnałem wejściowym jest napięcie a wyjściowym prąd.
C
R
C
+
G ( s) sCR
Człon różniczkujący rzeczywisty
Ogólna postać równania różniczkowego elementu różniczkującego
rzeczywistego (z inercją) jest następująca:
dy
dx
T
yk
dt
dt
Stąd wynika transmitancja:
ks
G (s)
(Ts 1)
gdzie: k – współczynnik wzmocnienia, T – stała czasowa.
Odpowiedź na skok jednostkowy obliczamy na podstawie własności
przekształcenia Laplace’a, otrzymując:
ks 1
k
Y ( s) G (s) X ( s)
(Ts 1) s (Ts 1)
k
y (t ) e
T
t
T
Transmitancja widmowa jest następująca:
kj
k 2T jk
G( j )
2 2
(1 jT )
1 T
Stąd
k T
P( )
1 2T 2
k
Q( )
2 2
(1 T )
k
A( )
2 2
1 T
2
( )
2
arctg T
Charakterystyki częstotliwościowe członu różniczkującego rzeczywistego
wyglądają następująco:
Przykładem układu różniczkującego rzeczywistego jest układ filtru
górnoprzepustowego RC.
C
R
Człon oscylacyjny
Ogólna postać równania różniczkowego elementu oscylacyjnego jest
następująca:
2
d y
dy
T
T2
y kx
2
dt
dt
T22 4T12
2
1
przy czym
Stąd wynika transmitancja:
k
G ( s) 2 2
(T1 s T2 s 1)
gdzie: k – współczynnik wzmocnienia, T1, T2 – stałe czasowe.
Inna postać równania różniczkowego elementu oscylacyjnego jest
następująca:
2
d y
dy
2
2
T
2
y
k
0
0
0x
2
dt
dt
2
przy czym
1
2
Stąd wynika transmitancja:
k
G( s) 2 2
(T s 2Ts 1)
gdzie: k – współczynnik wzmocnienia, T – stała czasowa,
– współczynnik tłumienia.
Odpowiedź na skok jednostkowy obliczamy na podstawie własności
przekształcenia Laplace’a, otrzymując:
k
1
k
1
Y (s) G (s) X ( s) 2 2
2 2
(T1 s T2 s 1) s (T s 2Ts 1) s
s1, 2
T2 T22 4T12
2
(
1)
0
2
2T1
1
1
s1t
y (t ) k[1 2
e 2
e s2t ]
T1 s1 ( s1 s2 )
T1 s2 ( s2 s1 )
y (t ) k[1
arctg
e
0 t
1
1 2
2
sin( 0 1 2 t )]
Odpowiedź członu oscylacyjnego na skok jednostkowy wygląda
następująco:
Transmitancja widmowa jest następująca:
k
k[(1 2T 2 ) j 2T ]
G( j ) 2
2
2 2 2
2 2 2
T ( j ) j 2T 1 (1 T ) 4 T
Stąd
k (1 2T 2 )
P ( )
2 2 2
2 2 2
(1 T ) 4 T
2kT
Q ( )
(1 2T 2 ) 2 4 2 2T 2
k
A( )
2 2 2
2 2 2
(1 T ) 4 T
2T
( ) arctg
2 2
1 T
Charakterystyki częstotliwościowe członu oscylacyjnego wyglądają
następująco:
Przykładem układu oscylacyjnego jest układ RLC.
R
L
C
Człon opóźniający
Równanie elementu opóźniającego ma postać:
y (t ) x(t )
skąd na podstawie twierdzenia o przesunięciu rzeczywistym wynika
transmitancja:
Y ( s)
s
G( s)
X ( s)
e
Element opóźniający nie zniekształca sygnału wejściowego lecz jedynie
przesuwa go w czasie.
Dziękuję za uwagę!