POLEMIKI I DYSKUSJE
DISCUSSIONS
NR 34
AN TRO PO MO TO RY KA
2006
PAMIĘĆ I STEROWANIE RUCHAMI
PRZEZ CZŁOWIEKA
MEMORY AND MOTOR CONTROL IN HUMANS
Wacław Petryński*
* dr, Górnośląska Wyższa Szkoła Handlowa, Katowice
Słowa kluczowe: teorie sterowania ruchami człowieka, antropokinetyka, rozmaitości,
topologia
Keywords: theories of motor control in humans, motor control science, manifolds, topology
STRESZCZENIE • SUMMARY
W pracy przedstawiono ogólny podział współczesnych teorii sterowania ruchami przez człowieka (według
Abernethy’ego i Sparrowa) oraz związanych z nimi procesów przetwarzania informacji w ośrodkowym układzie
nerwowym. Wskazano na niedostatki tego podziału, a także słabości modelu pamięci Atkinsona i Shiffrina
w zastosowaniu do opisu sterowania ruchami. Podkreślono rolę pamięci nie tylko w przechowywaniu informacji, ale również w ich przetwarzaniu. Wskazano na fakt, że u człowieka czynności umysłowe i ruchowe są ze
sobą ściśle związane, nie można więc zbudować spójnego modelu pamięci nie uwzględniającego tych drugich.
Zaproponowano nową definicję pamięci i nowy jej model, spójny z teorią Bernsztejna oraz teorią przenoszenia
Salomona i Perkinsa. Następnie omówiono rolę porcjowania (chunking) oraz wyraźnie rozróżniono pojęcia:
bodziec, podnieta czuciowa, wrażenie czuciowe, słowo, program ruchowy, wzorzec czuciowo-ruchowy i podnieta
ruchowa. Przedstawiono dwa obiegi przetwarzania informacji: czuciowo-ruchowy oraz słowny, a także modele
sterowania ruchami z wykorzystaniem tylko czuciowo-ruchowego („model 0”) oraz obu („model 8”).
In the paper the division of modern theories of motor control in humans (according to Abernethy and Sparrow)
and connected with them processes of information processing in central nervous system have been presented. The
shortcomings of this division were pointed out, as well as deficiencies of memory model by Atkinson and Shiffrin,
especially when applied to description of motor control in humans. The importance of information processing, and
not only information retention, was emphasised. It was also pointed to the fact that in humans mental and motor
performances are tightly connected, thus it is impossible to construct a coherent memory model without taking
into account the latter. Thus, a new memory model has been proposed, consistent with the Bernstein’s theory and
the transfer theory of Salomon and Perkins. Then the role of chunking has been discussed, with clear distinction
between notions of stimulus, sensory input, sensory impression, word, motor programme, sensorimotor pattern
and motor command. The two circles of information processing were presented: sensorimotor and symbolic
ones, as well as motor control models using only the sensorimotor circle (0-model) and both circles (8-model).
Wstęp
W opisie sterowania ruchami u człowieka istnieją
dwie grupy teorii: modele spontaniczności (emergent theories), które można utożsamić z opisem
funkcjonalnym (action approach), oraz modele
planowania (prescriptive theories), odpowiadające
dawnemu ujęciu strukturalnemu (motor approach) [1, 2, 3, 4]. Wyczerpujące zestawienie cech
obu tych grup modeli (tabela 1) podali Abernethy
i Sparrow [5].
Zauważmy, że tworząc powyższą tabelkę jej
autorzy zastosowali najprostszą taktykę pracy naukowej. Zgromadzili mianowicie osiągnięcia wie-
– 105 –
Wacław Petryński
Tabela 1. Zestawienie głównych cech opisu strukturalnego i opisu funkcjonalnego wg Abernethy’ego i Sparrowa [5].
Obszary kontrastów
Opis strukturalny (ang. motor approach)
Opis funkcjonalny (ang. action approach)
Rodzaj opisu
Opis przetwarzania informacji
Opis analogii komputerowej
Opis programowy
Reprezentacjonizm
Opis dynamiczny
Opis postrzegania bezpośredniego
Podstawy filozoficzne
Analogia człowiek-maszyna, wynikający
z teorii dualizm człowiek-środowisko
Realizm ekologiczny
Bezpośrednie współdziałanie (synergia) człowiekśrodowisko
Podstawy
teoretycznego opisu
modeli
Wiedza inżynierska
Informatyka
Fizyka współczesna
Biologia teoretyczna i porównawcza
Kierunek logiki
wyjaśnień
Niezbędność doświadczenia i inteligencji
Wyjaśnienie przez poszukiwanie procesów
„podstawowych”
Najbliższa gałąź
psychologii
Psychologia poznawcza
Psychologia ekologiczna
Organizacja ruchu
i sposób kontroli
Z góry na dół (“top-down”), hierarchiczna
kontrola przez programy działania
Z dołu do góry (“bottom-up”), heterarchiczna kontrola
przez struktury zbornościowe
Rozwiązanie kontroli
wielu stopni swobody
Przechowana w pamięci, ośrodkowa struktura
„uogólnionego programu ruchowego”
Struktury zbornościowe, które samoistnie organizują
własności dynamiczne narządów ruchu
Związki między
sposobem kontroli
a kinematyką
Wstępne planowanie pożądanego ruchu,
organizacja według stanowiącego wzór planu
nadrzędnego
Ruch jako konsekwencja samoorganizacji grup
mięśniowych
Ośrodkowa
reprezentacja
pożądanego ruchu
Istnieje
Nie istnieje
Mechanizmy
przenoszenia
Niezbędne, aby przetworzyć abstrakcyjny
program na rozkazy dla mięśni
Niekonieczne, gdyż mechanizmy kontrolne tkwią
w środowisku
Rola mięśni
Podrzędna: służą jedynie do wykonywania
rozkazów płynących z ośrodka
Dynamicznie określają formę ruchu i jego zależności
fazowe
Czasowa organizacja
ruchu
Czasową strukturę ruchu określają
wewnętrzne, kolejne rozkazy
Czasowa struktura ruchu powstaje samoczynnie
wskutek utrzymywania się określonych stosunków
fazowo-kątowych między poszczególnymi narządami
wykonawczymi
Stosunek do
postrzegania
Postrzeganie poprzedzające działanie jest
interpretowane jako niezależne zjawisko, oba
zaś tworzą proces łańcuchowy
Postrzeganie i działanie są procesami ściśle
współzależnymi, funkcjonalnie i ewolucyjnie
nierozdzielnymi; postrzeganie zależy od działania,
działanie zaś – od postrzegania
Model postrzegania
Model komputerowy (Marr, 19821)
Model postrzegania bezpośredniego według Gibsona
(19792)
Istota uczenia się
Stale doskonalona strategia przetwarzania
informacji (i rozwój stale powiększającej się
zdolności do tego przetwarzania)
Coraz lepsze dostrojenie do podstawowych
niezmienników i kontrola nad zależną od kontekstu
zmiennością
Rola pamięci w uczeniu Podstawa do doskonalenia procesu tworzenia
się
strategii i nabywania trwałych umiejętności
Minimalna, a nierzadko wręcz negowana, gdyż
podstawą procesów pamięciowych jest niezbędność
reprezentacji
Typ paradygmatu
eksperymentalnego
Badania laboratoryjne, pierwotnie nad ruchami Głównym celem jest badanie czynności naturalnych
wydumanymi i nienaturalnymi, ostatnio zaś
o znacznych walorach ekologicznych
nad bardziej realistycznymi
Jednostki miary
Informacje mierzone są matematycznie,
przy uwzględnieniu trudności i niepewności
w ustaleniu związku bodziec/odpowiedź
Najważniejsze informacje są opisane jednostkami
arbitralnie skalowanymi dla danej osoby wykonującej
czynność
1
D. Marr, L. Vaina, Representation and recognition of the movement shapes, Proceedings of the Royal Society of London B, 1982;
2114, s. 501-524.,
2
J.J. Gibson, The ecological approach to visual perception. Houghton-Mifflin, Boston, MA, 1979.
– 106 –
Pamięć i sterowanie ruchami człowieka
Table 1. The juxtaposition of main features of „movement systems” and „action systems” approaches according to Abernethy and
Sparrow [5]
Dimension of contrast
“Movement systems” approach
“Action systems” approach
Alternative Label
Information-processing approach
Prescriptive approach
Computational approach
Representational approach
Dynamical approach
Emergent approach
Direct approach
Philosophical Origins
Belief in the man machine metaphor
Implicit support of the actor-environment dualism
Belief in ecological realism
Explicit support of actor environment synergy
Origin of Theoretical
Explanation and Model
Computer Science and Engineering
Modem physics and Theoretical/Comparative
Biology
Direction of Explanatory
Logic
Improved Explanatory Power by adding
sophistication and intelligence to the
computational model
Improved Explanatory Power by seeking more
fundamental processes
Nearest Psychology
Sub-Discipline
Cognitive Psychology
Ecological Psychology
Movement Organisation
and Control Mode
Top-down, hierachical control acting via
prescription
Bottom up heterarchical control acting through
coordinative structures
Solution to the control
of Multiple Degrees of
Freedom
Generalised motor programs structured and stored Coordinative structures which self assemble the
centrally
dynamical properties of the motor system
Relationship of Control
Mode to Kinematics
A priori planning resulting in desired kinematics.
Organisation and assembly prescribed from
overriding plan
Kinematics as an a posteriori consequence of the
self organisation and self assembly of muscle
collectives.
Central Representation
of Desired Movement
Present
Absent
Translation Mechanism
Essential to convert abstract plan to “language”
of muscle
Not necessary; All control is in common
environmental units
Role of Muscle
Subserviently carries out control commands
specified centrally
Determines movement form and phase
interactions through dynamics
Temporal Organisation
of Movement
Temporal features of kinematics metered out
through an intrinsic time keeping device
Temporal features of kinematics arise as an
emergent property through preservation of
invariant phase angular relationships between
effectors
Relationship to
Perception
Independent serial processes with perception
preceding action (Separate stages as revealed by
Sternberg’s addictive factors method)
Perception and action as tightly coupled
processes, functionally and evolutionally
inseparable Perception in units of action and vice
versa
Perceptual Model
Supported
Computational model (e.g., Marr, 1982)
Direct Perception model of Gibson (1979)
Explanation of Learning
lmproved information processing strategies
(and, with development, increased processing
capacities).
Increased attunement to essential invariants and
control over context-conditioned variability
Role of Memory in
Learning
Fundamental to improve strategy formation and
long term skill acquisition
Minimal role in learning. Many deny memory
processes per se because of necessity to invoke
representation
Type of Experimental
Paradigm Advocated
Laboratory work on contrived movements
historically favoured but naturalistic work
ultimately desirable
Ecological validity essential. Study of natural
actions prescribed
Units of Measurement
Information measured mathematically with
respect to stimulus/task uncertainty and difficulty
Essential information described in units scaled to
the actor
lu innych uczonych i podzielili je na dwie grupy,
bez próby dogłębnej analizy. Stąd na przykład
niefortunne – moim zdaniem – przeciwstawienie
sobie „wiedzy inżynierskiej” i „fizyki współczesnej”
w wierszu „Podstawy teoretycznego opisu modeli”. Wynika z niego bowiem wniosek, że w ujęciu
– 107 –
Wacław Petryński
strukturalnym... świadomie rezygnujemy z sięgania
do osiągnięć fizyki współczesnej! Jest to sprzeczne
z zasadami heurystyki, zajmującej się nie prowadzeniem badań, lecz rozwiązywaniem problemów. Ta
metoda naukowego opisu świata zakłada bowiem
swobodne korzystanie ze wszystkich narzędzi, jakie
mogą być przydatne do rozwiązania danego problemu [6].
W pewnym okresie rozwoju nauki o ruchach
człowieka na świecie można było odnieść wrażenie, że istnieje skłonność do przeciwstawiania sobie
grup teorii opisanych w tabeli 1, a ich zwolennicy
starali się dowieść, iż każda z nich jest uniwersalna. W istocie jednak należałoby je postrzegać jako
wzajemnie uzupełniające się [7]. Paradygmaty
mogą stanowić czynnik ułatwiający porządkowanie
wiedzy, ale na tym ich rola powinna się kończyć.
Zamykanie się w ich granicach tworzy problemy
pozorne (np. energochłonne konflikty między ich
zwolennikami, nierzadko przypominające dyskusje o wyższości Świąt Wielkiej Nocy nad Świętami
Bożego Narodzenia) i z tego powodu hamuje postęp nauki.
Prawidłowości te są przejawem bardziej ogólnego zjawiska. Jest psychologiczną oczywistością,
że każdy uczony-odkrywca pragnie podkreślić
oryginalność, nowatorstwo i odrębność swoich
dokonań, rzeczywistych lub jedynie urojonych.
W interesie nauki leży natomiast, aby była ona
jak najbardziej jednolita, aby wszystkie dokonania
uczonych zostały niejako sprowadzone do wspólnego mianownika, czyli opisane jednolitym kodem.
Dlatego, z pełnym szacunkiem dla odkrywców,
najwięcej szans na sukces daje stosowanie heurystycznych metod rozwiązywania problemów, ignorujących wszelkie podziały nauki i likwidujących
odrębności teorii i modeli. W bardzo ogólnej skali
oznacza to również potrzebę jak najszybszego zasypania fosy oddzielającej tzw. nauki humanistyczne
od tzw. nauk ścisłych.
Dlatego dane zawarte w tabeli 1 należy traktować krytycznie. Nie twierdzę, że nie zawiera ona
informacji wartościowych, ale przypominają one
rodzynki w świątecznym cieście, a autorzy pozostawiają czytelnika sam na sam z problemem wybrania owych rodzynek.
Paradygmaty opisu sterowania ruchami
w świetle teorii Nikołaja Bernsztejna
Problemem pozornym jest na przykład przeciwstawienie opisanego w tabeli 1 ujęcia strukturalnego
(teorii planowania, prescriptive theories) i ujęcia
funkcjonalnego (teorii spontaniczności, emergent
Tabela 2. Poziomy sterowania ruchami wg Bernsztejna [8]
Poziom
Klasa ruchów
Twór sterujący w ośrodkowym układzie nerwowym
E
symboliczne przetwarzanie złożonych programów
ruchowych
kora mózgowa
D
wykonywanie złożonych, celowych programów
ruchowych
kora mózgowa
C
ruchy w przestrzeni
ciało prążkowane i kora mózgowa
B
synergie mięśniowe
gałka blada
A
napięcie mięśniowe
twór siatkowaty
Table 2. Bernstein’s motor control levels [8]
Level
Movements class
Controlling central nervous system component
E
Symbolic processing of complex movement programmes
Cortex
D
Execution of complex, intentional movement programs
Cortex
C
Spatial mobility
Corpus striatum and cortex
B
Muscle synergies
Globus pallidum
A
Muscle tonus
Formatio reticularis
– 108 –
Pamięć i sterowanie ruchami człowieka
theories). Już w drugim ćwierćwieczu ubiegłego
stulecia Nikołaj Aleksandrowicz Bernsztejn prześledził rozwój narządów ruchu i układu nerwowego istot żywych w toku całego procesu rozwoju
gatunkowego i na tej podstawie zbudował teorię
sterowania ruchami i uczenia się ich [8]. Stworzył
pięciopoziomowy wzorzec, w którym powiązał
rozwój narządów ruchu z rozwojem ośrodkowego
układu nerwowego, a poszczególnym klasom ruchu przyporządkował metody sterowania i twory
w ośrodkowym układzie nerwowym. Zestawienie
tych poziomów zawiera tabela 2.
Niemal w każdym ruchu bierze udział kilka poziomów sterowania. Ważnym składnikiem modelu
Bernsztejna jest zasada hierarchiczności, zgodnie
z którą dla każdego ruchu istnieje pewien główny
poziom sterujący, na którym wykonujący ów ruch
skupia swoją uwagę. Pozostałe poziomy pracują
zaś „w tle”, czyli bez konieczności skupiania świadomości wykonującego. Na przykład podczas jazdy na rowerze głównym poziomem jest poziom
C (przemieszczanie się w przestrzeni), więc rowerzysta skupia swoją uwagę na tym, dokąd jedzie.
Natomiast synergie mięśniowe związane z pedałowaniem (poziom B), czy napięcie mięśniowe, warunkujące utrzymanie odpowiedniej postawy na
siodełku (poziom A), nie są świadomie sterowane
przez rowerzystę.
Zauważmy, że teoria Bernsztejna znakomicie
godzi zwolenników „opisu funkcjonalnego” (teorii
spontaniczności) i „opisu strukturalnego” (teorii
planowania). Ten pierwszy dobrze opisuje sterowanie ruchami na poziomach A, B i C, drugi – na
poziomach D i E. Ponieważ zaś w wykonywaniu
złożonych czynności ruchowych mogą uczestniczyć
wszystkie poziomy, więc nie tylko możliwe, ale i niezbędne staje się wspólne działanie procesów opisanych w tabeli 1 w kolumnach „opis strukturalny”
i „opis funkcjonalny”
Pamięć
Wykonanie jakiegokolwiek ruchu wymaga „porozumiewania się” poszczególnych poziomów sterowania ruchami, czyli przetwarzania informacji
w ośrodkowym układzie nerwowym. Proces ten
dokonuje się głównie w pamięci, jednakże niemal
wszystkie jej słownikowe definicje mówią jedynie
o przechowywaniu informacji, nie zaś o jej przetwarzaniu. Dlatego proponuję na wstępie zdefiniować to pojęcie następująco:
pamięć – zdolność ośrodkowego układu nerwowego do
doboru informacji, zarówno odbieranej zmysłami, jak i wypracowywanej wskutek myślenia abstrakcyjnego, przetwarzania jej w celu przechowania lub sterowania bieżącym
zachowaniem, zapamiętywania i przypominania, a także
zapominania niektórych niepotrzebnych, a niekiedy również potrzebnych informacji [9].
W proponowanej definicji warto szczególnie
podkreślić możliwość doboru informacji, czyli wybiórczość pamięci (memory selectivity). Pozwala
ona na utrwalanie jedynie tych wzorców zacho-
Tabela 3. Składniki pamięci według Atkinsona i Shiffrina [1, 10].
Układ pamięci
Właściwości
krótkotrwała pamięć czuciowa
– STSS
pamięć krótkotrwała – STM
pamięć długotrwała – LTM
czas przechowywania
poniżej 1 s.
od 1 do 60 s.
nieograniczony
typ kodowania
konkretny, czuciowy
nieco abstrakcyjny
bardzo abstrakcyjny
pojemność
nieograniczona
7±2 porcji
nieograniczona
Table 3. Memory elements according to Atkinson and Shiffrin [10, 1].
Memory System
Attribute
Short-term Sensory Store
– STSS
Short-term Memory – STM
Long-term memory – LTM
Storage duration
Less than1 s.
1 s to 60 s
Seemingly limitless
Type of coding
Very literal
More abstract
Very abstract
Capacity
Seemingly limitless
7±2 items
Seemingly limitless
– 109 –
Wacław Petryński
wań, które umożliwiają najskuteczniejsze rozwiązywanie zadań czuciowo-ruchowych.
Klasyczny model Atkinsona i Shiffrina [10] zakładał podział pamięci na trzy składniki: krótkotrwałą
pamięć czuciową (short-term sensory store, STSS),
pamięć krótkotrwałą (short-term memory, STM)
oraz pamięć długotrwałą (long-term memory, LTM).
Właściwości poszczególnych składników przedstawia tabela 3 [1].
Już z samych nazw wynika, że podstawowym
kryterium podziału była długość czasu przechowywania informacji. Później model ten uzupełniono
o pamięć operacyjną (working memory, WM) [11],
ale mając trzy składniki wyróżnione według jednego kryterium (długość czasu przechowywania)
i czwarty – według innego kryterium (funkcja), nie
sposób było zbudować spójnego systemu. Ponadto
niektórzy uczeni uważają, że pamięć operacyjna
dugotrwaa pami symboliczna LTMv
przechowywanie informacji symbolicznej
krótkotrwaa
pami
czuciowa
STSS
filtrowanie
podniet
czuciowych
narzdy
zmysów
tworzenie
podniet
czuciowych
Ryc. 1. Ukad
pamici
pod wpywem
przetwarzanie
bodców
przekodowanie
sowno-czuciowe
dugotrwaa pami czuciowa LTMs
przechowywanie informacji czuciowej
odbiór
odbiór
przetwarzanie informacji nadawanie
czuciowej
uk odruchowy
(sprzenie
bezporednie)
pami
operacyjna
WM
przetwarzanie
wrae
czuciowych
w podniety
ruchowe
nadawanie
(wzorowany na modelu ATKINSONA i
procesy pobudzane umysowo
pami
krótkotrwaa
STM
przetwarzanie
impulsów
czuciowych
we wraenia
czuciowe
mentalizacja
automatyzacja
przekodowanie
czuciowo-sowne
procesy pobudzane czuciowo
nadawanie
przetwarzanie informacji symbolicznej
odbiór
ukad ruchu
pobudzanie
mini
narzdy
ruchu
wytwarzanie
si )i ruchów
SHIFFRINA
uwzgldniajcy
rodowisko
tworzenie skutków dziaania si i ruchów; wytwarzanie bodców
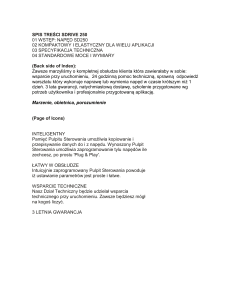
Ryc. 1. Układ pamięci (wzorowany na modelu Atkinsona i Shiffrina) uwzględniający przetwarzanie informacji niezbędnych do sterowania
ruchami i spójny z teorią Bernsztejna [15, zmodyfikowane]
– 110 –
Pamięć i sterowanie ruchami człowieka
stanowi część pamięci krótkotrwałej STM [12, 13],
inni zaś – że stanowi osobny składnik pamięci [14].
Niemniej ze względu na prostotę i przydatność dydaktyczną model ten jest powszechnie wykorzystywany w analizach procesów pamięciowych u człowieka.
Badaniem procesów pamięciowych zajmują
się głównie psychologowie, którzy skupiają swoją
uwagę przede wszystkim na procesach umysło-
wych. W badaniach ruchów konieczne jest jednak
uwzględnienie w modelu pamięci swoistych składników niezbędnych do sterowania ruchami, których
nie ma w „klasycznym” modelu Atkinsona i Shiffrina. Dla potrzeb badaczy ruchów człowieka konieczne jest zatem stworzenie innego modelu, obejmującego swoistości procesów czuciowo-ruchowych
i spójnego z teorią Bernsztejna. Propozycję takiego
modelu przedstawia rycina 1 [15]. We wzorcu tym
Long-Term Verbal memory LTMv
Retention of symbolic information
Mentalization
Automation
Sensory-verbal
transcoding
Short-Term
Memory
STM
Transformation
of sensory inputs
into sensory
impressions
Short-Term
Sensory
Memory
STSS
filtering of
sensory inputs
Verbal-sensory
transcoding
Long-term Sensory Memory LTMs
Retention of sensory information
Reception
Reception
Sensory information
processing
Reflex Arch
(direct coupling)
Sense
Organs
production of
sensory inputs
under the
influece
of stimuli
Sending
Sending
Working
Memory
WM
Transformation
of sensory
impressions into
motor commands
Mentally-driven processes
Sensory-driven processes
Sending
Symbolic information processing
Reception
Motor System
Muscles
activation
Motor Organs
Production of
forces and
movements
Environment
Production of forces and movements effects; Production of stimuli
Fig. 1. Memory system (based on Atkinson and Shiffrin model), taking into account information processing necessary for movements
control and consistent with Bernstein’s theory [15, modified]
– 111 –
Wacław Petryński
pozostawiono wprawdzie tradycyjne, powszechnie
używane nazwy poszczególnych składników pamięci, ale za podstawowe kryterium podziału przyjęto
nie czas przechowywania informacji, lecz funkcję
danego składnika w układzie.
Przede wszystkim cały układ pamięci można
„pionowo” podzielić na dwa tory: wstępujący (dośrodkowy, czuciowy, aferentny) oraz zstępujący
(odśrodkowy, ruchowy, eferentny). Tor wstępujący
składa się z krótkotrwałej pamięci czuciowej (STSS),
pamięci krótkotrwałej (STM) oraz pamięci długotrwałej, czuciowej i symbolicznej (LTMs i LTMv).
Płynące ze środowiska bodźce (stimulus) zostają
w narządach zmysłów przetworzone na ciągi impulsów nerwowych, tworzących podniety czuciowe
(sensory input). W krótkotrwałej pamięci czuciowej
STSS są ona albo „odfiltrowywane” i odrzucane,
albo przekazywane dalej. W tym drugim przypadku możliwe jest albo natychmiastowe wykonanie
ruchu wskutek przetworzenia w łuku odruchowym,
albo przekazanie do pamięci krótkotrwałej STM.
Pełni ona dwojaką funkcję. Po pierwsze – następuje
w niej rozpoznanie (postrzeganie) podniet czuciowych i przetworzenie ich w uświadomione wrażenia czuciowe (sensory impressions). Następnie
wrażenie może zostać skierowane do długotrwałej
pamięci czuciowej LTMs (gdzie uruchamia jakiś już
istniejący wzorzec ruchów) albo po przekodowaniu na kod symboliczny, czyli przetworzeniu w słowo (word) – do pamięci długotrwałej symbolicznej
LTMv.
Składnikami toru zstępującego są: pamięć długotrwała LTM, pamięć operacyjna WM i układ
ruchu. Niezależnie od tego, czy do pamięci operacyjnej trafiają czuciowe wzorce ruchu, czy też symboliczne programy ruchowe, do układu ruchu muszą zostać przekazane podniety ruchowe (motor
commands). Dlatego w ogólnym układzie pamięci
(przetwarzania informacji) musi znaleźć się również
„przekładanie” informacji symbolicznej (słownej)
na ruchową (podniety ruchowe) i przeciwnie.
Konieczność owego „przekładu” stanowi kryterium podziału „poziomego” na część dolną (czuciową) i górną (symboliczną). Uwzględniając fakt,
iż na poziomie myślenia abstrakcyjnego wykorzystywany jest kod symboliczny, zaś na poziomie
doznań zmysłowych – kod czuciowo-ruchowy, niezbędne było rozróżnienie dwóch warstw pamięci
długotrwałej: długotrwałej pamięci symbolicznej
LTMv oraz długotrwałej pamięci czuciowej LTMs.
W pierwszej przechowywane i przetwarzane są
uogólnione symboliczne programy ruchowe (generalized motor programmes), w drugiej – czuciowo-ruchowe wzorce ruchów (motor patterns) [16].
Podział warstwy, przebiegający między długotrwałą
pamięcią czuciową LTMs i długotrwałą pamięcią
symboliczną LTMv, odpowiada z grubsza podziałowi między poziomami C i D w modelu Bernsztejna.
Takiej dwudzielnej budowy pamięci długotrwałej odpowiada opisany przez Salomona i Perkinsa
[17, 18] mechanizm przenoszenia wysokiego (high-road transfer) oraz przenoszenia niskiego (low-road transfer). Pierwszy z wymienionych procesów
wymaga przekodowania informacji czuciowej na
kod symboliczny i wykorzystania długotrwałej pamięci symbolicznej LTMv, drugi zaś – wykorzystania
długotrwałej pamięci czuciowej LTMs oraz zapisu
i przetwarzania informacji w kodzie czuciowo-ruchowym.
Porcjowanie (chunking)
Podobnie jak w „klasycznym” modelu Atkinsona
i Shiffrina, swoistymi „wąskimi gardłami” w układzie przedstawionym na rycinie 1 są: pamięć krótkotrwała LTM, która może pomieścić 7±2 jednostki
informacji [19], oraz pamięć operacyjna WM, która
mieści około 10 takich jednostek [14]. Teoretycznie
nieograniczoną pojemność mają krótkotrwała pamięć czuciowa (STSS) oraz pamięć długotrwała
(LTM), jednakże również w nich informacja jest
podzielona na określone „porcje” [16]. Znamienne,
że opublikowana w 1975 roku podstawowa praca
R.A. SCHMIDTA, zawierająca jego słynną teorię wykorzystującą schematy do opisu sterowania czynnościami ruchowymi, nosi tytuł A schema theory
of discrete motor skill learning (Teoria schematów
w nauczaniu nieciągłych3 nawyków ruchowych;
podkr. moje – WP.) [20].
Rozumowanie Bernsztejna, stanowiące podstawę jego teorii, polegało na analizie rozwoju
narządów ruchu istot żywych i towarzyszącego
mu rozwoju możliwości sterowania ruchami, wynikających z właściwości układu nerwowego. Idąc
tym tropem rozumowania, można by też przeanalizować rozwój nośników informacji wykorzystywanych do sterowania ruchami jako proces równoległy do rozwoju narządów ruchu i układu nerwowego. Przemiany procesu porcjowania informacji
u istot żywych (chunking) można zatem postrzegać
jako nieodłączny składnik stałego poszukiwania
sposobu coraz wydajniejszego kodowania informacji, niezbędnego do jej uporządkowania i coraz
3
W polskim nazewnictwie matematycznym zamiast określenia „nieciągły” używa się słowa „dyskretny”. Może to budzić nieporozumienia, gdyż w potocznym języku określenie „dyskretny”
ma inne znaczenie.
– 112 –
Pamięć i sterowanie ruchami człowieka
skuteczniejszego wykorzystania w sterowaniu ruchami. Przypomnijmy, że jednym z podstawowych
atrybutów życia jest pobudliwość [21]. Zwierzęta
nie posiadające rozwiniętego ośrodkowego układu nerwowego reagują na pojedyncze bodźce.
W przypadku istot bardziej rozwiniętych możliwe
jest już rozpoznawanie informacji (postrzeganie),
czyli świadome przetwarzanie podniet czuciowych,
powstałych wskutek przetworzenia bodźców w narządach zmysłów.
W nauce o sterowaniu ruchami na ogół nie rozróżniamy bodźców i podniet czuciowych, więc tym
bardziej wrażeń czuciowych i słów. To, czy dany
bodziec zostanie przekształcony w podnietę czuciową, wrażenie, czy słowo, zależy zarówno od rodzaju tego bodźca, jak i możliwości odbiorcy. Bodziec
bólowy wywoła podnietę czuciową i odpowiedź
ruchową – odruch – i u ryby, i u psa, i u człowieka. Bodziec w postaci polecenia „siadaj!”, powodującego określone wrażenie słuchowe, wywoła
odpowiedź ruchową – nawyk czuciowo-ruchowy
– u wytresowanego psa i u człowieka. Natomiast
bodziec w postaci polecenia słownego „pójdź do
sklepu po bułki i mleko” wywoła odpowiedź ruchową – złożoną czynność czuciowo-ruchową – jedynie u człowieka.
Kolejnym krokiem jest tworzenie i używanie
do sterowania ruchami (a także uczenia się ich)
spójnych zespołów bodźców, czyli syntez czuciowych [8]. Synteza taka stanowi pewien system,
czyli – zgodnie z teorią systemów – łącznie zawiera więcej informacji niż prosta suma tworzących
ją bodźców. Kolejny etap postępu w procesie
przekazywania i przetwarzania informacji umożliwiło wykorzystanie odwzorowań symbolicznych,
czyli słów [22]. Rozwój sprawności przetwarzania
informacji wskutek wykorzystania słów (w sensie
uogólnionym) zwiększa szybkość i skuteczność tego
procesu, mimo konieczności wprowadzenia dodatkowego procesu: przekładu odczuć czuciowych na
kod symboliczny
poziom E
przetwarzanie symbolicznych odwzorowa ruchu
PRZEKODOWANIE
kod czuciowy => kod symboliczny
kod symboliczny => kod czuciowy
poziom C
ruchy w przestrzeni
wykonanie ruchu
informacja zwrotna
poziom D
symboliczne odwzorowania ruchu
poziom B
synergie miniowe
poziom A
napicie miniowe
kod czuciowy
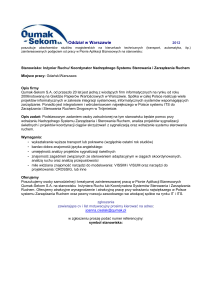
Ryc. 2. Przekodowanie czuciowo-symboliczne w modelu Bernsztejna; modele „0” (poziomy A, B i C) i „8” (poziomy A, B, C oraz D,E)
sterowania ruchami i uczenia się ich [23]
– 113 –
Wacław Petryński
odwzorowania symboliczne w procesie przyjmowania informacji (czuciowym, aferentnym) oraz
odwzorowań symbolicznych na czuciowe w procesie tworzenia ruchu (ruchowym, eferentnym),
co przedstawia rycina 2. Zauważmy, że zjawisko
różnicowania kodów przetwarzania informacji zostało zasygnalizowane (choć niezbyt szczegółowo)
już w klasycznym modelu Atkinsona i Shiffrina.
W tabeli 3 w wierszu „typ kodowania” mamy do
czynienia z różnymi kodami wymiany i przetwarzania informacji w różnych składnikach pamięci.
Zwierzęta, mające rozwinięte jedynie „podkorowe” poziomy A i B oraz częściowo korowy poziom
C, mogą w sterowaniu ruchami wykorzystywać
jedynie podniety czuciowe, wrażenia czuciowe,
wzorce ruchów i podniety ruchowe, czyli dolny
krąg obiegu informacji na rycinie 2, obejmujący te
właśnie poziomy. Taki przepływ informacji można
nazwać „modelem 0”. Natomiast ludzie, dysponujący zdolnością myślenia abstrakcyjnego (poziomy
D i E), mogą wykorzystywać oba kręgi obiegu infor-
macji: dolny, czuciowo-ruchowy (poziomy A, B i C)
oraz górny, symboliczno-słowny (poziomy D i E),
obejmujący słowa i programy ruchowe; taki przepływ informacji można nazwać „modelem 8” [23]
Teorie sterowania ruchami w nowym modelu
pamięci
Warto zauważyć, że z przedstawionym wzorcem przetwarzania informacji, spójnym z teorią
Bernsztejna, można skojarzyć odpowiednie teorie
sterowania ruchami. Poziom B wraz z rozmaitością
niesterowaną ruchową UCMm można skojarzyć
z teorią ekologiczną Gibsona [24], według której
uświadomienie sobie jakiegokolwiek bodźca nie
jest niezbędne. Obejmują one zatem jedynie obszar czynników fizycznych oraz podniet czuciowych
i działań. Można ją nazwać teorią bezpośredniego
sprzężenia bodźca z reakcją. Ponieważ nie zakłada konieczności wykorzystania odwzorowań symbolicznych (myślenia abstrakcyjnego), więc może
symbolic code
E-level
processing of symbolic movement projections
TRANSCODING
sensory code => symbolic code
symbolic code => sensory code
execution orders
feedback
D-level
symbolic movement projections
C-level
spatial mobility
B-level
muscle synergies
A-level
muscle tonus
sensory code
Fig. 2. Sensory-symbolic transcoding in Bernstein’s model; models „0“ (levels A, B, C) and „8“ (levels A, B, C and D, E) of movements
control and movements learning [23].
– 114 –
Pamięć i sterowanie ruchami człowieka
objaśniać najprostsze zachowania ruchowe zwierząt i podświadome działania ludzi.
Poziom D i teorie „cybernetyczne” (Bernsztejna,
Czchaidze, Schmidta, Adamsa itp.) [25, 26, 27]
można kojarzyć z przetwarzaniem programów ruchowych i uogólnionych programów ruchowych
(generalized motor programs, GMP), które wymagają nie tylko uświadomienia sobie bodźca czy podniety, ale również przetwarzania ich symbolicznych
odwzorowań. Można by je określić mianem teorii
cybernetyczno-programowych. Ponieważ zakładają one wykorzystanie myślenia abstrakcyjnego,
więc do takiego sterowania ruchami jest zdolny jedynie człowiek.
W zasadzie jedyną teorią, którą można by skojarzyć ze sterowaniem ruchami z poziomu C, jest
teoria bodźca warunkowego. Fakt ten można przypisać pewnym trudnościom badawczym, wiążącym
się jednak z ograniczeniami narzuconymi przez
paradygmaty naukowe. Badanie bezpośredniego
sprzężenia bodźca i reakcji (z łączącą je „czarną
skrzynką”) jest typowym zadaniem behawioryzmu.
Teorie cybernetyczno-programowe, z wykorzystaniem kodu symbolicznego, wymagają już podejścia
poznawczego (kognitywistycznego) lub nawet konstruktywistycznego4, niemniej w tym obszarze można wiele wiedzy czerpać z dokonań językoznawców
czy psycholingwistów [28, 29, 30]. Bezpośrednim
badaniom wymykają się natomiast nieuświadomione podniety czuciowe czy wrażenia czuciowe
uświadomione jedynie na poziomie czuciowym.
Jest to domena instynktu (u zwierząt) lub intuicji
(u człowieka). Wybitnym filozofem zajmującym się
tymi zagadnieniami był francuski noblista, zwolennik intuicjonizmu H. Bergson [31]. Przeciwstawiał
on intelekt, działający świadomie i względnie
niezależny od organizmu instynktowi, działającemu nieświadomie i czerpiącemu swą siłę z organizmu. Intuicję określił jako uświadomiony instynkt.
Bergson, podobnie jak niemal wszyscy uczeni, zajmował się głównie czynnościami umysłowymi, czyli
psychologiczno-rozumowymi. W przedstawionym
w niniejszej pracy modelu pamięci instynkt i intuicję można jednak skojarzyć z poziomem C według
teorii Bernsztejna lub z warstwą czuciową pamięci
długotrwałej (LTMs). Należałoby założyć, że bodźce
wywołujące jakieś działanie instynktowne lub intu-
icyjne mogą być albo zewnątrzpochodne, albo wewnątrzpochodne. Takie opisy należałoby zaliczyć do
teorii wzorców czuciowo-ruchowych. Ponieważ
działania instynktownego czy intuicyjnego nie można utożsamiać z działaniami pod wpływem bodźców warunkowych, więc wyczerpującą teorię (lub
teorie), opisującą zachowania ruchowe sterowane
z poziomu C, należałoby dopiero stworzyć.
Uwagi końcowe
By człowiek mógł wykonać jakąkolwiek czynność
ruchową, musi dysponować zdolnościami dwojakiego rodzaju:
– wysiłkowymi, umożliwiającymi wydatkowanie
energii,
– informacyjnymi, umożliwiającymi sterowanie
przepływami tej energii.
Pierwsza grupa stanowi przedmiot zainteresowania i badań fizjologii czy biochemii. W drugiej
grupie zdolności można natomiast wyróżnić trzy
ważne składniki:
– motywację,
– uwagę,
– pamięć.
Motywacja jest zjawiskiem z dziedziny psychologii, warunkującym podjęcie jakiejkolwiek działalności, uwaga i pamięć są zaś zjawiskami obejmującymi procesy psychofizjologiczne. Pierwsza z nich
oznacza skupienie świadomości na tych składnikach czynności, które warunkują jej skuteczne
wykonanie. Główne procesy informacyjne – przechowywanie i przetwarzanie informacji – zachodzą
jednak w pamięci.
Nie ulega wątpliwości, że podstawowymi warunkami rozpoczęcia jakiejkolwiek czynności ruchowej
są: odpowiedni zasób energii i właściwa motywacja. Jednakże sposób, sprawność i skuteczność tej
czynności zależą od procesów przetwarzania informacji, które zachodzą w pamięci. Nie sposób zatem
zbudować poprawnego wzorca sterowania ruchami człowieka nie mając dobrego modelu pamięci,
uwzględniającego nie tylko procesy umysłowe, ale
również czuciowo-ruchowe. Niniejsza praca stanowi próbę zbudowania takiego właśnie modelu.
4
Choć, paradoksalnie, cybernetyka jest najdoskonalszym wytworem właśnie behawioryzmu. Fakt ten zgadza się ze stwierdzeniem T. Kuhna, że badania naukowe to wytężone i ofiarne próby zmuszenia przyrody, by dopasowała się do szufladek stworzonych przez
wykształcenie akademickie, do których to szufladek nie chce się dostosować nie tylko przyroda, ale nawet wytwory nauki.
– 115 –
Wacław Petryński
PIŚMIENNICTWO • LITERATURE
[1] Schmidt RA: Motor Control and Learning. A Behavioral
Emphasis. Illinois, Wyd. Human Kinetics, Champaign,
1988
[2] Petryński W: Contribution to Motor versus Action Approach
Dispute. Antropomotoryka – Journal of Human Kinetics,
Suplement, 2000; 4: 149-158,
[3] Petryński W: Dwa wzorce opisu czynności ruchowych
– strukturalny i funkcjonalny. Sport Wyczynowy, 2001;
1-2: 39-50.
[4] Hossner EJ, Künzell S: Motorisches Lernen; w Mechling
H, Munzert J (red.): Handbuch BewegungswissenschaftBewegungslehre. Hofmann, Schorndorf, 2003: 131-153;
przekład polski: Petryński W: Uczenie się ruchów. Antropomotoryka, 2003; 26: 81-93.
[5] Abernethy B, Sparrow WA: The Rise and Fall of Dominant
Paradigms in Motor Behaviour Research; w Summers
JJ (red.): Approaches to the Study of Motor Control and
Learning. Amsterdam. Elsevier Science Publishers B. V.,
1992: 3-45.
[6] Góralski A: Twórcze rozwiązywanie zadań. Warszawa,
PWN, 1989.
[7] Petryński W: Motor Approach and Action Approach – Controversy or Complementarity?. “Current Research in Motor
Control”, Bielsko-Biała, 27-29.10. 2000: Katowice, AWF,
2000: 174-179.
[8] Bernsztejn NA: O łowkosti i jejo razwitii. Moskwa, Fizkultura i Sport, 1991.
[9] Petryński W: Motor Control and Learning. A Behavioral
Emphasis – czyli o sterowaniu ruchami człowieka na poły
tylko behawiorystycznie. Antropomotoryka, 2005; 15, 31:
89-101.
[10] Atkinson R, Shiffrin R: Human memory: A proposed
system and its control processes. w Spence K, Spence
J. (red.) The psychology of learning and motivation:
Advances in research and theory. New York: Academic
Press, 1968, 2.
[11] Atkinson R, Shiffrin R: The control of short-term memory.
Scientific American, 1971; 225: 82-90.
[12] Zimbardo PG: Psychologia i życie. Warszawa, Wydawnictwo Naukowe PWN, 1999.
[13] Baddeley A: The Psychology of Memory. w Baddeley AD,
Kopelman MD, Wilson BA (red.): The Essential Handbook
of Memory Disorders for Clinicians, John Wiley & Sons,
2004.
[14] Smith, EE, Jonides J: Neuroimaging analyses of human
working memory. Proceedings of the National Academy
[15]
[16]
[17]
[18]
[19]
[20]
[21]
[22]
[23]
[24]
[25]
[26]
[27]
[28]
[29]
[30]
[31]
– 116 –
of Sciences of the United States of America, 1998; 95:
12061-12068.
Petryński W: Motor control and learning according to
Bernstein’s theory, w Starosta W, Squatrito S. (red.):
Scientific Fundaments of Human Movement and Sport
Practice. Centro Universitario Sportivo Bolognese in
Bologna, 2005; 21: 172-174.
Schmidt RA, Lee TD: Motor control and learning. A behavioral emphasis. Illinois, Human Kinetics, Champaign,
2005.
Salomon G, Perkins DN: Rocky roads to transfer: Rethinking mechanisms of a neglected phenomenon. Educational
Psychologist, 1989: 24(2): 113-142.
Czajkowski Z, Petryński W: Przenoszenie w teorii i praktyce trenerskiej. Antrpomotoryka, 2006; 16, 33: 95-102.
Miller G: The Magical Number Seven, Plus or Minus Two:
Some Limits on Our Capacity for Processing Information.
The Psychological Review, 1956; 63: 81-97.
Schmidt RA: A schema theory of discrete motor skill
learning. Psychological Review, 1975; 82: 225-260.
Jaroszyk F (red.): Biofizyka. Podręcznik dla studentów.
Warszawa, Wyd. Lekarskie PZWL, 2002.
Petryński W: Zagadnienia przekładu w sterowaniu ruchami człowieka. Antropomotoryka, 2005; 15, 32: 83-93.
Petryński W: Uczenie się czynności ruchowych w świetle
teorii Bernsztejna. Antropomotoryka, 2005; 15, 31: 6578.
Gibson JJ: The ecological approach to visual perception.
Boston, MA, Houghton-Mifflin, 1979.
Bernsztejn NA: Niekotoryje nazrewajuszczije problemy regulacji dwigatielnych aktow. Moskwa, Woprosy
Psichołogii, 1957; 6.
Czchaidze LW: Koordynacja ruchów dowolnych i powstanie nawyków ruchowych człowieka w świetle ogólnych
zasad sterowania i układów sterowanych. Wychowanie
Fizyczne i Sport, 1962; 2: 155-161.
Schmidt RA: Motor Control and Learning. A Behavioral
Emphasis. Illinois, Human Kinetics, Champaign, 1988.
Kurcz I: Pamięć, uczenie się, język. Warszawa,
Wydawnictwo Naukowe PWN, 1995.
Lyons J: Chomsky. Warszawa, Prószyński i S-ka, 1998.
Allott R: The motor theory of language. w von RafflerEngel W, Wind J, Jonker A (ed.): Studies in Language
Origins. Amsterdam/Philadelphia, John Benjamins Publishing Company, 1991; 2: 123-157.
Russell B: Mądrość Zachodu. Warszawa, Penta, 1995.