Białostocka
Politechnika
Wydział Elektryczny
Katedra Elektroenergetyki, Fotoniki i Techniki Świetlnej
Instrukcja do zajęć laboratoryjnych
Temat ćwiczenia: BADANIE REGULATORÓW MOCY BIERNEJ
Numer ćwiczenia: 2
Laboratorium z przedmiotu:
Urządzenia i instalacje elektryczne
KOD: ES1A400 029
Opracował:
dr inż. Grzegorz Hołdyński
2013
-2-
1. WPROWADZENIE
1.1. Zapotrzebowanie i wytwarzanie mocy biernej
Większość urządzeń zainstalowanych w zakładach przemysłowych pobiera moc
bierną indukcyjną podczas ich normalnej pracy. Należą do nich głównie silniki asynchroniczne (ok. 70 %), transformatory (ok. 20 %) oraz inne odbiorniki indukcyjne
(10 %) takie jak dławiki, piece indukcyjne itp. Konieczność dostarczenia mocy biernej
powoduje obniżenie wartości współczynnika mocy urządzeń a mała jego wartość
wpływa niekorzystnie na zdolność produkcyjną generatorów, zwiększa straty wytwarzania i przesyłu energii, zmniejsza „przepustowość” układu przesyłowego oraz zwiększa spadki napięć w sieci. Wynika z tego, że układ elektroenergetyczny nie może ekonomicznie pracować przy niskim współczynniku mocy. Zmusza to do stosowania specjalnych środków powodujących zwiększanie cos .
Poprawę współczynnika mocy można osiągnąć dwiema drogami:
w sposób naturalny - przez unikanie nadmiernego poboru mocy biernej,
w sposób sztuczny - przez zainstalowanie dodatkowych źródeł mocy biernej u odbiorców.
Ponieważ stosowanie naturalnych metod poprawy cos nie zawsze daje zadawalające rezultaty, do lokalnego wytwarzania mocy biernej indukcyjnej mogą być w
praktyce używane następujące urządzenia:
kompensatory synchroniczne,
kompensatory energoelektroniczne,
kondensatory.
Wybór rodzaju urządzenia kompensacyjnego powinien być oparty zarówno na
przesłankach technicznych jak i ekonomicznych. W zakładach przemysłowych ze
względu na ww. kryteria najczęściej stosuje się baterie kondensatorów z urządzeniami
do automatycznego załączania członów kondensatorowych.
-3-
1.2. Kompensacja mocy biernej za pomocą kondensatorów
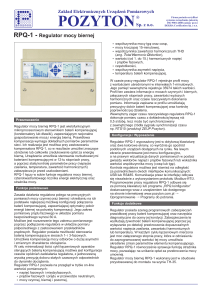
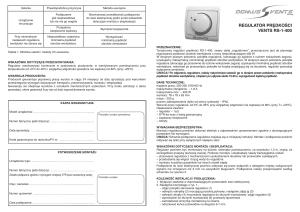
Zasadę kompensacji mocy biernej przy pomocy kondensatorów przedstawiono na
rys. 1.1.
Rys. 1.1. Kompensacja mocy biernej przy pomocy kondensatorów: a) schemat
przyłączania kondensatora do odbiornika jednofazowego, b) wykres wektorowy
napięć i prądów, c) trójkąt mocy
Po włączeniu kondensatorów (rys. 1.l) prąd bierny w linii zasilającej zmniejsza się
od wartości Ib1 do wartości Ib2 = Ib1 – Ic czyli zmniejsza się również pobór mocy biernej. Znając wartość mocy czynnej P1 pobieranej przez odbiór oraz wartość współczynnika mocy (cos 1) przed kompensacją a następnie wartość wymaganego współczynnika mocy (cos 2), można obliczyć potrzebną moc kondensatorów do kompensacji:
QC P1 (tg1 tg 2 )
Gdzie:
QC - moc baterii kondensatorów, [kvar],
P1 - moc czynna pobierana przez odbiornik, [kW],
tg , tg -tangensy kąta 1, 2 przed i po kompensacji.
Kondensatory do poprawy współczynnika mocy wykonywane są jako 1-fazowe
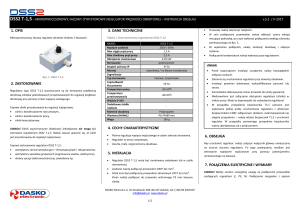
lub 3-fazowe. Związek mocy biernej kondensatora, układu połączeń oraz pojemności
kondensatora jest następujący:
-4-
kondensator 1-fazowy:
I C2
QC U I C C U
C
2
Gdzie:
U - napięcie zasilania, [V],
I - prąd kondensatora, [A],
C - pojemność kondensatora, [F],
- pulsacja, [Hz].
kondensator 3-fazowy złożony z kondensatorów połączonych w gwiazdę:
3 I C2
QC 3 U I C C U 2
C
kondensator 3-fazowy złożony z kondensatorów połączonych w trójkąt:
I2
QC 3 U I C 3 C U 2 C
C
Rys.1.2. Schematy układów połączeń kondensatorów a) kondensator 1-fazowy, b)
kondensator 3-fazowy o pojemnościach łączonych w gwiazdę c) kondensator 3fazowy o pojemnościach łączonych w trójkąt
Baterie kondensatorów mogą być lokalizowane w różnych punktach sieci zakładu
przemysłowego. Zależnie od miejsca umieszczenia baterii rozróżnia się kompensację:
indywidualną - kondensatory przyłączone są bezpośrednio do zacisków odbiornika,
grupową – kondensatory są umieszczone w rozdzielni oddziałowej zasilającej grupę odbiorników,
centralną - kondensatory są umieszczone w stacji zasilającej zakład przemysłowy.
-5-
W zależności od potrzeb stosuje się jeden z ww. wariantów lub stosuje się kompensację mieszaną łącząc np. kompensacją indywidualną (do części odbiorników) i
centralną.
1.3. Samoczynne urządzenia sterujące - regulatory cos
Zapotrzebowanie mocy biernej może w pewnych okresach być mniejsze niż moc
zainstalowanej baterii kondensatorów. Aby nie dopuścić do przekompensowania należy w tych okresach odpowiednio zmniejszyć moc baterii stosownie do zapotrzebowania. Osiąga się to przez podział baterii na kilka członów włączanych lub wyłączanych
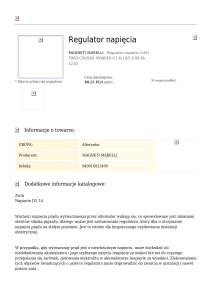
w razie potrzeby przez samoczynne urządzenia sterujące. Najważniejszymi elementami
takiego urządzenia (zwanego dalej regulatorem cos ) jest człon pomiarowy, który
śledzi stan obciążenia sieci mocą bierną (mierzy istniejący w sieci cos ) oraz człon
wykonawczy, który najczęściej steruje cewkami styczników powodujących załączanie
lub wyłączanie kolejnych członów baterii kondensatorów. Schemat ogólny włączenia
regulatora cos przedstawia rysunek 1.3.
L1
L2
L3 PEN
człon pomiarowy
L1
L2
La
człon wykonawczy
La
5
4
3
2
1
P1
S5
S1
P2
S4
S3
S2
S1
S2
S5
S4
C5
C4
S1
S2
S3
C3
C2
C1
Rys.1.3.Schemat ideowy podłączenia zasilania i sterowania regulatora cos
Współczesne regulatory mogą łączyć do 12 członów baterii kondensatorów. Moc załączanych lub wyłączanych kolejnych członów może być jednakowa, dwukrotnie większa
od mocy pierwszego członu lub wzrastać w ciągu geometrycznym. W ten sposób moc
baterii zmienia się stopniowo o określoną wartość, nazywaną mocą stopnia regulacji. Przykłady sposobów załączania członów baterii ilustrują tabele 1.1 – 1.3.
-6-
Tabela 1.1. Szereg łączeniowy o stosunku 1:1:1... (9 stopni reg. 9 członów kond.)
Nr
stopnia
1
2
3
4
5
6
7
8
9
Q
X
X
X
X
X
X
X
X
X
Q
Załączany człon o mocy
Q
Q
Q
Q
Q
Q
Q
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
Moc
baterii
Q
2Q
3Q
4Q
5Q
6Q
7Q
8Q
9Q
Tabela 1.2. Szereg łączeniowy o stosunku 1:2:2:2... (9 stopni reg. 5 członów kond.)
Nr
stopnia
Q
X
1
2
3
4
5
6
7
8
9
Moc
baterii
Załączany człon o mocy
2Q
X
X
X
X
X
X
X
X
X
X
X
X
2Q
X
X
X
X
X
X
2Q
X
X
X
X
2Q
Q
2Q
3Q
4Q
5Q
6Q
7Q
8Q
9Q
X
X
Tabela 1.3. Szereg łączeniowy o stosunku 1:2:4:8 (15 stopni reg. 4 człony kond.)
Nr
stopnia
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Moc
baterii
Załączany człon o mocy
Q
X
X
2Q
X
X
X
X
X
X
X
X
X
X
X
X
8Q
X
X
X
X
4Q
X
X
X
X
X
X
-7-
X
X
X
X
X
X
X
X
Q
2Q
3Q
4Q
5Q
6Q
7Q
8Q
9Q
10Q
11Q
12Q
13Q
14Q
15Q
Do podstawowych parametrów regulatorów cos zalicza się:
ilość stopni wyjściowych,
napicie znamionowe,
prąd znamionowy,
częstotliwość znamionowa,
zakres zmian obciążenia,
wartość współczynnika mocy (tylko RC-4),
zakres regulacji strefy nieczułości Q/n,
zakres regulacji mocy biernej nieskompensowanej %Q/n,
czas zadziałania kolejnych łączników.
Nastawa Q/n jest parametrem, który decyduje o czułości regulatora. Musi być ona
dostosowana do mocy najmniejszego kondensatora oraz przekładni przekładnika prądowego. Nastawa %Q/n jest parametrem, który decyduje o wielkości mocy nieskompensowanej odniesionej do wartości mocy pierwszego stopnia baterii kondensatorów.
Zwiększanie tego parametru powoduje przesunięcie progów reakcji urządzenia na
zmiany mocy w stronę mocy indukcyjnej. W rezultacie zmniejsza to dokładność kompensacji. Opisane wyżej nastawy decydują o charakterystyce pracy regulatora. Poprzez
ich dobór można dobrać charakterystykę pracy regulatora tak, aby osiągnąć pożądany
poziom kompensacji mocy biernej. Przykłady doboru nastaw przedstawiono na rysunkach 1.4. – 1.6.
Rys. 1.4. cos =1, %Q/n = 100% - sieć niedokompensowana
-8-
Rys. 1.5. cos =1, %Q/n = 60% - sieć skompensowana
Rys. 1.6. cos =1, %Q/n = 0% - sieć przekompensowana
1.4. Omówienie regulatorów cos badanych w ćwiczeniu
1.4.1. Regulator współczynnika mocy typu RC-4
Regulator pracuje w układzie automatycznej kompensacji mocy biernej i może być
instalowany w sieciach 3-fazowych trój- i czteroprzewodowych niskiego napięcia.
Regulator włącza i wyłącza poszczególne człony baterii kondensatorów (o mocach w
szeregu 1:1:1:1:1:1), w zależności od istniejącego w kompensowanym układzie współczynnika mocy.
Na płycie czołowej regulatora znajdują się elementy nastawcze szerokości strefy
nieczułości oraz współczynnika mocy, wyłącznik, bezpiecznik oraz lampki sygnalizacyjne (lampka sygnalizacyjna włączenia do pracy oraz lampki sygnalizujące pracę na
załączanie lub wyłączanie baterii). Po włączeniu regulatora do sieci należy nastawić
parametry pracy regulatora. Nastawienia wymaganej wartości współczynnika mocy
dokonuje się za pomocy pokrętła umieszczonego na płcie czołowej regulatora. Następnie nastawia się strefę nieczułości według następującego algorytmu:
oblicza się prąd jednego stopnia baterii,
-9-
IC
QC
3 Un
Gdzie:
IC - prąd kondensatora, [A],
QC - moc baterii, [var],
Un - napięcie sieci, [V].
oblicza się prąd rozruchowy regulatora,
Ir
IC
0,7 n
Gdzie:
IC - prąd rozruchowy regulatora, [A],
n - przekładnia przekładnika prądowego.
UWAGA! Prąd rozruchowy musi zawierać się w granicach 0.35-1.4, w
przeciwnym razie oznacza to niewłaściwy dobór baterii
kondensatorów lub przekładnika.
na podstawie tabeli 1.4. odczytać dla wymaganego cos oraz obliczonego
prądu Ir położenie nastawki szerokości strefy nieczułości
Tabela 1.4. Położenie nastawy szerokości strefy nieczułości
Nastawiane wartości
wsp. mocy cos
Położenie nastawki min.
szerokości strefy
śr.
nieczułości
max.
0.70 0.75 0.80 0.85 0.90 0.93 0.96 0.98
0.35 0.32
0.7 0.64
1.4 1.28
0.3
0.6
1.2
0.27 0.25 0.24 0.23 0.23
0.55 0.51 0.49 0.47 0.45
1.1 1.02 0.93 0.94 0.90
1.4.2. Regulator mocy biernej typu ACM-3
Regulator przeznaczony jest do automatycznej kompensacji mocy biernej w sieciach trój- i czteroprzewodowych niskiego napięcia. Baterie kondensatorów należy
zestawić w jeden z szeregów 1:2:2:2:2, 1:2:4:4:4 lub 1:2:4:8:16. Regulator wykonany
jest w technice analogowo - cyfrowej, co pozwala na szybką i dokładną kompensację
mocy biernej.
Na płycie czołowej regulatora umieszczono siedem diod elektroluminescencyjnych, z których pięć umieszczonych u góry, oznaczonych numerami od 1 do 5, sygna- 10 -
lizuje stan gotowości baterii do załączenia (zgaśnięcie diody oznacza, że człon został
załączony. W dolnej części znajdują się dwie diody oznaczone przez „ZAŁ” (zielona) i
„WYŁ” (czerwona). Świecenie diody „ZAŁ” oznacza niedokompensowanie i pracę
regulatora na załączanie, zaś świecenie diody „WYŁ” oznacza przekompensowanie i
pracę regulatora na wyłączanie kondensatorów. Brak świecenia diod oznacza stan
skompensowania zgodnie z nastawami szerokości strefy nieczułości Q/n oraz mocy
biernej nieskompensowanej %Q/n.
Po włączeniu regulatora do sieci należy dokonać ustawienia nastaw:
szerokości strefy nieczułości Q/n, gdzie Q jest mocą pierwszego stopnia
baterii [w kvar] a n to przekładnia przekładnika prądowego,
mocy biernej nieskompensowanej %Q/n - zakres tej nastawy zawiera sie w
granicach 0-100%, przy czym w zakresie 0-50% układ jest przekompensowany. Aby tego uniknąć zaleca się dobór tej nastawy w zakresie 50-100 %.
1.4.3. Regulator mocy biernej typu RMB-2
Regulator przeznaczony jest do automatycznej regulacji cos w sieciach trój- i
czteroprzewodowych niskiego napięcia.
Na płycie czołowej regulatora znajduje się tylko jedno pokrętło do ustawiania szerokości strefy nieczułości Q/n. Sześć diod elektroluminescencyjnych sygnalizuje swoim świeceniem załączenie poszczególnych członów baterii kondensatorów. Umieszczone w dolnej części dwie diody – zielona i czerwona – sygnalizuje rodzaj pracy
regulatora – na załączanie lub na wyłączanie członów. Brak świecenia tych diod oznacza stan skompensowania zgodny z nastawa szerokości strefy nieczułości Q/n. Na
płycie czołowej umieszczono miernik cos o zakresie 0,8poj – 0,7ind.
1.4.4. Mikroprocesorowy regulator mocy biernej typu MRM-12
Mikroprocesorowy regulator mocy biernej MRM-12 jest nowoczesnym urządzeniem do automatycznej kompensacji mocy biernej w sieciach trójfazowych trój- i czteroprzewodowych niskiego napicia. Zastosowanie mikroprocesora, który steruje
wszystkimi funkcjami regulatora zapewniło osiągnięcie dużej szybkości działania,
- 11 -
dokładność i niezawodność regulatora. Przy prawidłowo dobranym przekładniku prądowym, bateriach kondensatorów oraz nastawach możliwe jest osiągniecie cos =
0,995. Dwanaście wyjść sterujących pozwala na łączenie baterii kondensatorów w
różnych szeregach mocy (zależnie od trybu pracy), co pozwala na dokładną kompensację mocy biernej.
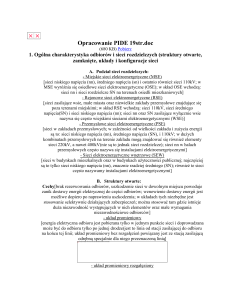
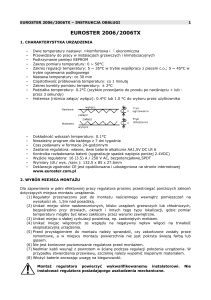
Rys.4.4. Widok płyty czołowej regulatora MRM-12
Na płycie czołowej regulatora znajdują się następujące elementy:
A - 12 diod elektroluminescencyjnych oznaczonych od 1 do 12, sygnalizuje
stan odpowiednich sekcji baterii kondensatorów,
B - trzycyfrowy wskaźnik, w którym zależnie od trybu pracy urządzenia
wyświetlane są następujące informacje:
praca automatyczna - wyświetlany jest aktualny współczynnik mocy na przemian z procentowym wskazaniem prądu obciążenia,
praca ręczna - wyświetlana jest litera C oraz liczba będąca numerem stopnia którego stan można zmienić używając przycisków „+”,
„–’’ wyświetlanie trwa przez okres naciskania klawiszy, a po puszczeniu ostatniego przycisku jeszcze przez 5s a następnie przez 5s
wyświetlany jest aktualny współczynnik mocy cos ,
praca w stanie czuwania - regulator w stan czuwania przechodzi po
obniżeniu się mierzonego prądu poniżej 1%. Na wyświetlaczu pojawia się napis „I=0”; wszystkie sekcje baterii zostają jednocześnie
odłączone,
- 12 -
praca testowa - po przejściu do trybu pracy testowania, regulator
zapala wszystkie segmenty wyświetlacza tj. „0.0.0”, a następnie
wyświetlany jest napis „Est”, po naciśnięciu klawisza „+” wyświetla się numer stopnia baterii włączonej w danej chwili poprzedzonego literą „C”,
programowanie - na wyświetlaczu pojawiają się wartości odpowiednich nastaw,
C - dwie diody LED oznaczone symbolami „ZAŁ” (zielona), „WYŁ”
(czerwona), służą do sygnalizacji aktualnego stanu sieci energetycznej i
odpowiadającego mu stanu pracy regulatora.
praca automatyczna: brak świecenia - sieć skompensowana z dokładnością do nastaw; świeci zielona - sieć niedokompensowana,
(praca na załączanie kondensatorów); świeci czerwona - sieć przekompensowana (praca na wyłączanie kondensatorów),
praca w stanie czuwania - pulsują obie diody jednocześnie, na wyświetlaczu napis „I = 0”,
praca testowa - obie diody zostaje włączone, podobnie jak wszystkie inne diody kontrolne,
programowanie - w czasie programowania diody „ZAŁ” i „WYŁ”
służą do objaśniania niektórych parametrów programowania,
D - pięć diod LED objaśniających odpowiednią nastawę, której wartość pojawia się na wyświetlaczu w czasie programowania,
praca automatyczna, praca w stanie czuwania - wszystkie diody są
wygaszone,
praca ręczna - świeci się czerwona dioda,
praca testowa - wszystkie diody się świeca aż do momentu opuszczenia pracy testowej,
programowanie - w czasie programowania zapalenie odpowiedniej
diody objaśnia modyfikowaną nastawę,
E - trzy przyciski membranowe opisane „+”, „-”, „^” służą do obsługi regulatora,
- 13 -
praca automatyczna - naciśnięcie przycisku „^” i przytrzymanie go przez
5s powoduje przejście do trybu programowania urządzenia, co sygnalizowane jest pojawieniem się na wyświetlaczu napisu „---”, naciśnięcie klawisza „+” i przytrzymanie go przez 5s w czasie pracy automatycznej powoduje przejście do trybu przeglądania wszystkich nastaw urządzenia, pojawia się wtedy na wyświetlaczu wartość %Q/n, wyświetlanie kolejnych
nastaw uzyskuje się naciskając klawisz „^” (jak przy programowaniu),
praca ręczna - po wybraniu pracy ręcznej podczas programowania urządzenia
można modyfikować ilość załączonych sekcji baterii, naciśniecie klawisza „+”
lub „-” powoduje odpowiednio włączenie lub wyłączenie stopnia baterii, którego numer jest wyświetlany, próba ustawienia liczby 0 lub o 1 większej od
liczby stopni powoduje opuszczenie trybu pracy ręcznej,
praca testowa - naciśniecie przycisku „^” i przytrzymanie go przez 5s powoduje pojawienie się napisu „---”, po puszczeniu przycisku „^” należy
przycisnąć klawisz „+” co powoduje przejście do trybu testowania członów wyjściowych, co jest sygnalizowane pojawieniem się napisu „ESt”
Po włączeniu regulatora do sieci należy dokonać doboru wielkości nastaw:
szerokość strefy nieczułości Q/n,
Q
n
0,62
Q
10 3
U 3n
Gdzie:
- Q - moc pierwszego stopnia baterii, [kvar],
- n - przekładnia przekładnika pradowego,
- U - napięcie sieci, [V].
moc bierna nieskompensowana %Q/n. Nastawa ta decyduje o wielkości
mocy biernej nieskompensowanej odniesionej do wartości mocy pierwszego najmniejszego kondensatora w baterii.
Ustawienie parametrów rozpoczyna się przyciskając przez ok. 5s przycisk oznaczony „^”. Przejście regulatora do trybu programowania sygnalizowane jest pojawieniem się napisu „---” na wyświetlaczu. Kolejne naciskanie przycisku „^” powoduje
zapalanie się czerwonych diod sygnalizacyjnych umieszczonych z prawej strony na
- 14 -
płycie regulatora. Opis przy diodzie informuje, jaki parametr ma być ustawiany. Dobór
wartości odbywa się przez naciskanie klawiszy „+”, „-”.
UWAGA! Po podaniu napięcia zasilającego, regulator włączą wszystkie elementy
elektroluminescencyjne. Stan ten trwa ok. 1 min. Następnie na wyświetlaczu pojawia się liczba stopni wyjściowych ustawionych przez producenta. Wyświetlanie liczby stopni trwa ok. 2 s. Następnie regulator
przechodzi do pracy automatycznej
2. CEL I ZAKRES ĆWICZENIA
Celem ćwiczenia jest zapoznanie się z wybranymi zagadnieniami związanymi z
kompensacją mocy biernej w sieciach niskiego napicia. Ćwiczenie obejmuje wyznaczanie charakterystyki współczynnika mocy silnika indukcyjnego oraz badania eksploatacyjne seryjnych regulatorów cos .
3. PROGRAM ĆWICZENIA
3.1. Opis stanowiska
Badanie regulatorów współczynnika mocy przeprowadza się na stanowisku laboratoryjnym, którego zasadnicze wyposażenie stanowi modelowa sieć elektroenergetyczna nn z odbiornikami indukcyjnymi (dołączanymi z zewnątrz) załączanymi za
pomocą styczników, dziewięć baterii kondensatorów do poprawy cos , które mogą
być załączane ręcznie lub przez regulatory, zestaw mierników tj. miernik cos , woltomierz oraz amperomierz. Na płycie głównej stanowiska, umieszczone są cztery regulatory mocy biernej, które będą badane w ćwiczeniu.
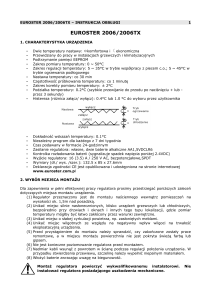
Rozmieszczenie elementów sterowniczych i aparatury pomiarowej na pulpicie stanowiska przedstawia rys.3.1.
- 15 -
L1 L2
Zał
Wył
P1
L3 PEN
S1
S2
P2
Zał
RĘCZNE ZAŁĄCZANIE BATERII
P1
S1
S2
P2
2
1
Wył
4
3
7
6
5
8
V
1
A
Zał
Wył
S1
S1
S1
S1
S1
S1
S1
S1
S1
S1
S1
S1
S1
S1
S1
S1
S1
S1
2
Zał
Wył
C1
C1
C1
C1
C1
3
Rys.6.1. Rozmieszczenie elementów na pulpicie stanowiska
C1
C1
C1
Uruchamianie stanowiska powinno odbywać się w sposób następujący:
należy podłączyć stanowisko do tablicy zasilającej zwracając uwagę na
zgodność faz na tablicy i zaciskach stanowiska (zaciski główne znajdują się
z lewej strony płyty czołowej),
podłączyć odbiorniki do zacisków na pulpicie,
załączyć stanowisko - obecność napięcia sygnalizowana jest świeceniem
się lampki na przycisku włącznika głównego oraz trzech lampek sygnalizujących obecność trzech faz napięcia,
włączenie obciążeń odbywa się za pomocą przycisków „ZAŁĄCZ” na pulpicie obok zacisków danego odbiornika, wyłączanie odbiorników odbywa
się przez przyciśnięcie przycisku „WYŁĄCZ”,
załączanie kondensatorów odbywa się przez podanie napięcia na cewkę
główną stycznika (można tego dokonać łącząc zaciski styczników z zaciskami 1, 2, 3, 4, 5, 6, 7, 8, 9), włączenie kondensatora sygnalizowane jest
świeceniem się lampki na pulpicie.
UWAGA! w czasie pomiarów, gdy nie są wykorzystywane przekładniki prądowe,
ich zaciski k, l musza być bezwzględnie zwarte. W przeciwnym razie
może to być przyczyną uszkodzenia przekładników. Również zaciski
1L2 i 2L2 musza być zwarte (lub musi być włączony pomiędzy nie
miernik). Brak zwarcia tych zacisków oznacza brak jednej fazy zasilania i niemożliwe jest włączenie obciążeń (sygnalizowane jest to brakiem
świecenia się lampki w fazie L2).
3.2. Wyznaczanie charakterystyki współczynnika mocy silnika
asynchronicznego przy zmianach obciążenia
Schemat układu pomiarowego, który służy do wyznaczania współczynnika mocy
w funkcji obciążenia silnika przy różnych układach połączeń uzwojeń gwiazda - trójkąt) przedstawia rys.3.2.
- 17 -
L1 L2
L3 PEN
A1
I
U
cos
przystawka
do miernika cos
A2
V1
W
A
M
3
Rw
C
G
D
V
H
At
Aw
220V
Rys.3.2. Układ pomiarowy do wyznaczania charakterystyki cos = f(P)
Wyznaczania charakterystyki współczynnika mocy dokonuje się określając moc
jaką jest obciążony wał silnika. Zmianę obciążenia silnika dokonuje się przez regulacje
obciążenia prądnicy obcowzbudnej prądu stałego, sprzęgniętej na wale z badanym
silnikiem. Pomiary przeprowadza się dla uzwojeń połączonych w gwiazdę oraz trójkąt.
Przy pomiarze dla uzwojeń połączonych w gwiazdę, obciążenie silnika nie powinno
przekraczać 40% jego mocy znamionowej.
3.3. Kompensacja mocy biernej odbiornika o niskim współczynniku mocy
Do zacisków stanowiska laboratoryjnego podłączyć dwa silniki o mocy 4kW każdy, które będą stanowiły obciążenie. Schemat układu połączeń przedstawia rys.3.3.
- 18 -
L1 L2
L3 PEN
Ręczne załączanie baterii
1
M
3
4
5
6
M
3
7
8
9
9
2
S1
S9
S2
C1
C2
C9
0,25 kvar
0,5 kvar
1 kvar
Rys.3.3. Schemat układu pomiarowego do badania kompensacji mocy biernej
odbiornika o niskim cos
Analogicznie jak w punkcie poprzednim włączyć mierniki (V, A, cos ). Załączyć
stanowisko i załączyć obciążenie. Na podstawie pomiarów obliczyć pobór mocy czynnej, biernej i pozornej przez zadane obciążenie. Na podstawie tych danych obliczyć
moc baterii kondensatorów potrzebną do skompensowania cos do wartości 0.8, 0.85,
0.9, 0.96. W celu sprawdzenia poprawności obliczeń załączyć obliczoną moc baterii
kondensatorów („Ręczne załączanie kondensatorów”) i zaobserwować wyniki.
3.4. Badanie regulatorów współczynnika mocy
3.4.1. Regulator typu RC-4
Podłączyć regulator jak na rysunku 3.4.
- 19 -
L1
L2
L3 PEN
9 10 11 12 13 1415 16
Regulator cos RC4
1 2 3 4 5 6 7 8
P1
S1
S1
P2
S2
S3
S4
S5
S6
S2
S1
S2
C1
C3
C3
S6
S5
S4
S3
C4
C5
C6
Rys.3.4. Schemat włączania do sieci regulatora typu RC-4
Podłączyć do stanowiska dwa silniki jako obciążenie (jak w punkcie poprzednim).
Przyrządy pomiarowe jak poprzednio. Do wyjść sterujących regulatora podłączyć
kondensatory w szeregu mocy 1:1:1... Dobrać nastawy regulatora dla cos = 0.8, 0.9,
0.96, nastawę czułości regulatora obliczyć (patrz punkt 1.4.). Włączyć regulator, włączyć odbiornik 1. Zaobserwować i zanotować pracę regulatora:
czas załączania kolejnych stopni,
kolejność załączania stopni,
dokładność skompensowania,
przekompensowanie (jeśli wystąpiło).
Włączyć odbiornik 2 i obserwować pracę regulatora j.w. Zmienić nastawę cos i
obserwować pracę regulatora. Wyłączyć odbiorniki i obserwować pracę regulatora.
3.4.2. Regulatory elektroniczne (ACM-3, RMB-2, MRM-12)
Obciążenie i przyrządy pomiarowe - jak poprzednio. Regulatory podłączyć zgodnie ze schematami na rysunkach 3.5. – 3.7.
- 20 -
L1
L2
L3 PEN
Regulator cos ACM-3
człon pomiarowy
L1
L2
La
człon wykonawczy
La
5
4
3
1
2
P1
S5
S1
P2
S4
S2
S3
S1
S2
S5
S4
C5
S1
S2
S3
C4
C3
C1
C2
Rys.4.2.Sposób włączania regulatora ACM-3
L1
L2
L3 PEN
Regulator cos RMB -2
L1
L2
La La
1
2
3
4
5
6
P1
S1
S1
P2
S2
S3
S4
S5
S6
S2
S1
S2
C1
C3
C3
C4
Rys.4.3.Sposób włączenia regulatora RMB-2
- 21 -
S6
S5
S4
S3
C5
C6
L1
L2
L3 PEN
A 1 2
12
Regulator MRM
k 1 U
U
P1
S1
S1
P2
S2
S12
S2
S1
S12
S2
C1
C3
C12
Rys.4.5. Schemat włączania regulatora MRM-12
Do wyjść regulatora podłączyć kondensatory w szeregu mocy 1:1:1..., 1:2:2...,
1:2:4:8. Dobrać nastawy szerokości strefy nieczułości Q/n (patrz punkt 1.4.). Parametr
%Q/n ustawić na poziomie 50%. Włączyć stanowisko, włączyć odbiornik 1. Zaobserwować i zanotować pracę regulatora:
czas załączania kolejnych stopni,
kolejność załączania stopni,
dokładność skompensowania,
przekompensowanie (jeśli wystąpiło).
Włączyć odbiornik 2 i obserwować pracę regulatora j.w. Po skompensowaniu
przez regulator, zmienić nastawę %Q/n do wartości 0%, 100%. W obu przypadkach
obserwować pracę regulatora. Ponownie ustawić nastawę %Q/n na wartość 50% i
wyłączać odbiorniki 1 i 2 - obserwować pracę regulatora.
- 22 -
4. WYMAGANIA BHP
Podczas wykonywania ćwiczeń w laboratorium Urządzeń Elektrycznych należy
zachować szczególną ostrożność i stosować się do zaleceń prowadzącego oraz przepisów zawartych Instrukcji BHP Laboratorium Katedry Elektroenergetyki.
5. SPRAWOZDANIE STUDENCKIE
1. Wyniki pomiarów zestawić w tabelach.
2. Sporządzić wykres charakterystyki cos = f(P) silnika indukcyjnego o uzwojeniach połączonych w trójkąt oraz gwiazdę.
3. Porównać pracę regulatora RC-4 i elektronicznych, zwracając szczególną
uwagę na szybkość reakcji na zmiany poboru mocy biernej, szybkość i dokładność kompensacji. Porównać i skomentować prace regulatorów elektronicznych zwracając uwagę na szybkość i dokładność kompensacji. Opisać, jaki
wpływ ma szereg mocy baterii kondensatorów na pracę regulatora i dokładność kompensacji.
6. LITERATURA
1. Niebrzydowski J.: Sieci elektroenergetyczne. WPB, Białystok 1997.
2. Baterie kondensatorowe do kompensacji mocy biernej niskiego napięcia typ BK-180. z
automatyczną regulacją cos φ - Instrukcja montażu i obsługi. Przedsiębiorstwo Badawczo-Wdrożeniowe „OLMEX” S.A, Portal internetowy: http://www.olmex.pl,
Stan na dzień 20.09.2013 r.
3. Sulkowski M., Skliński R. Hołdyński G. : Zapotrzebowanie na energię bierną, zastosowanie urządzeń kompensujących oraz sposoby kompensacji w układach SN i nn.
Wiadomości Elektrotechniczne nr 5 2008
4. Strojny J.: Kondensatory w sieci zakładu przemysłowego. WNT, Warszawa 1976
5. Wiatr J., Orzechowski M.: Poradnik projektanta elektryka. Dom Wydawniczy
„MEDIUM” Warszawa 2012
- 23 -