TRANZYSTORY - PORÓWNANIE WYKŁAD 15 SMK
Na pdstw.: W. Marciniak, WNT 1987: „Przyrządy półprzewodnikowe i układy scalone”,
Z. Nosal, J. Baranowski, „Układy elektroniczne”, PWN 2003
7. PORÓWNANIE TRANZYSTORÓW BIPOLARNYCH I POLOWYCH
- konstrukcja TB: (E,B,C) asymetryczna, TP: S, G, D (symetryczna),
- sterowanie prądowe w tranzystorach bipolarnych,
- sterowanie napięciowe w tranzystorach polowych,
- transkonduktancja tranzystora bipolarnego (nie zależy od parametrów jego struktury) jest
kilkaset razy większa niż dla tranzystora polowego: gm=IE/T (1000 mA/V); gm=2ID/|UGS-UT|
(5 mA/V) (zależy od rozmiarów geometrycznych struktury, przenikalności elektrycznej
warstwy dielektryka i ruchliwości nośników)
- napięcie nasycenia ograniczające obszar pracy z lewej strony jest kilkanaście razy mniejsze
w tranzystorach bipolarnych (0.1V, kilka V)
- napięcie maksymalne ograniczające obszar pracy z prawej strony (2kV tr. bip., kilkaset V tr.
pol.)
- porównanie TB i TP możliwe przy jednakowych wartościach maksymalnych prądów
(ICmax~IDmax)
Zalety tranzystorów polowych:
- bardzo duża impedancja wejściowa
- małe szumy (PNFET)
- kwadratowy przebieg charakterystyki przejściowej ID(UGS)
- możliwość stosowania tranzystora jako obciążenie rezystancyjne oraz rezystor sterowany
(MIS)
1
- zastosowania analogowe układy scalone – JFET (PNFET)
- zastosowania cyfrowe układy scalone – IGNFET
8. PUNKT PRACY TRANZYSTORA
1. Definicja
Punkt położony na jego charakterystyce napięciowo-prądowej lub w polu rodziny
charakterystyk; określa się wartością prądu i napięcia w odniesieniu do określonej rodziny
charakterystyk. Zwykle dotyczy składowych stałych, ale używa się tez pojęcia chwilowy
punkt pracy.
Zadanie konstruktora – wybór korzystnych warunków zasilania elementów aktywnych
oraz zaprojektowanie obwodów zasilania, umożliwiających uzyskanie założonych punktów
pracy i utrzymanie ich w różnych warunkach (zmiany temperatury, wymiana elementów).
Parametry tranzystorów bardzo silnie zależą od punktu pracy. Uwzględnienie
wszystkich możliwych parametrów i ich związków z punktem pracy jest niemożliwe.
2
We wzmacniaczach małych sygnałów:
dla małych częstotliwości:
h11~K1/IC, h12~K2+K3/IC, h21=const(IC), h22=K4IC+K5
dla dużych częstotliwości – wartość współczynnika stabilności
Optymalny punkt pracy tranzystora w układzie elektronicznym zależy od funkcji, jaką
spełnia ten układ (np. ID optymalne jest inne dla wzmacniacza pasmowego (małe ID),
wzmacniacza selektywnego (duże ID), czy wzmacniacza różnicowego (ID~0.6A)).
- we wzmacniaczu małej częstotliwości Ku=gm*RD~A/SQR(ID)
- we wzmacniaczu rezonansowym korzystna jest praca przy dużym prądzie drenu (duże gm)
3
- we wzmacniaczu różnicowym – liczy się stałość prądu
2. Wybór punktu pracy tranzystorów w typowych zastosowaniach
Jest najczęściej kompromisem między maksymalnym wzmocnieniem a minimalnym
współczynnikiem szumów. Gdy punkt pracy zostanie dobrany celowe jest zapewnienie jego
stałości przy zmianach temperatury, napięć zasilających, wymianie elementów. Co się dzieje,
gdy punkt pracy nie będzie dostatecznie stały?
4
Punkt pracy:
- musi być bezpieczny dla elementu – granice wartości mocy, prądów i napięć nie mogą być
przekroczone;
- powinien zapewnić uzyskanie założonych parametrów układu;
- powinien być na tyle stabilny, aby przy zmianach warunków zewnętrznych (T, U) zapewnić
funkcjonowanie układu zgodne z wymaganiami;
- musi być realizowany przy wybranych źródłach zasilania układu.
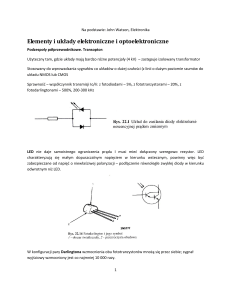
Dla tranzystora bipolarnego, którego schemat układu zasilania pokazuje rysunek,
położenie punktu pracy, Q, jest jednoznacznie określone przez charakterystyki tranzystora
oraz wartości napięcia zasilania UCC i rezystancji RB i RC.
Układ opisują równania Kirchhoffa:
U CC I C RC U CE ; U CC I B RB U BE , które można przedstawić graficznie (Rys. 3.6)
Przy zmianie prądu bazy IB punkt Q przesuwa się w polu charakterystyk IC(UCE) po
linii prostej o nachyleniu zależnym od RC. Mając dane IC, UCE można policzyć IB, UBE oraz
RC i RB.
5
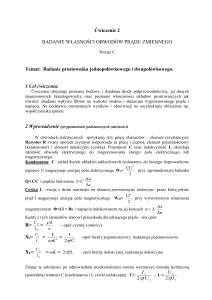
W układach analogowych małej mocy najczęściej stosowane są tranzystory polowe
FET z kanałem wbudowanym. Układ zasilania pokazuje rys. 3.10. Równania opisujące
obwód są:
U DS U DD I D ( Rs RD ); U GS I D Rs
UDS=UDD-ID(RS+RD)
UGS=-IDRS
Jeżeli dane są UDD, RD, RS, punkt pracy można wyznaczyć graficznie.
6
ELEMENTY PRZEŁĄCZNIKOWE
Stany przełącznika pp: blokowanie (bardzo duża rezystancja elementu – klucz
otwarty), przewodzenie (bardzo mała rezystancja – klucz zwarty). Tranzystor bipolarny
przełączany ze stanu odcięcia do nasycenia lub tranzystor polowy przełączany ze stanu
zatkania do przewodzenia.
1. Tranzystor jednozłączowy (UJT – unijunction transistor) – dioda dwubazowa –
trójkońcówkowy przyrząd przełączający, działający na zasadzie modulacji konduktywności
pp, w którym przełączanie ze stanu nieprzewodzenia do stanu przewodzenia występuje dla
pewnej krytycznej wartości napięcia – napięcia przełączenia (regulacja niezależnym źródłem
napięcia polaryzacji).
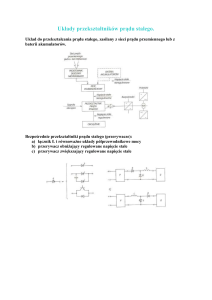
a). Budowa i zasada działania
Struktura fizyczna tranzystora – rys. 11.2a – belka półprzewodnika typu n wyposażona
w kontakty omowe na obu końcach (bazy, B1 i B2) i zawierająca złącze p-n.
Niewielki obszar typu p – emiter. Odległość między bazą B1 a emiterem 0.5...0.7 odległości
między bazami.
Symbole graficzne tranzystorów jednozłączowych – rys. 11.2b. Struktura planarna tranzystora
z emiterem typu p – rys. 11.2c.
Rys. 11.3a – podstawowy układ włączania tranzystora jednozłączowego.
Złącze emiter-B1 polaryzowane jest w kierunku przewodzenia ze źródła UEE (wartość prądu
ogranicza RE). Obwód B1-B2 zasilany jest ze źródła UBB (biegun dodatni do B2). Podstawowa
charakterystyka – zależność prądu IE od napięcia emiter-B1 (UE) – rys. 11.4.
7
Gdy UBB=0 (bazy zwarte) IE(UE) – typowa charakterystyka złącza p-n (krzywa 1). Gdy UBB≠0
– schemat zastępczy z rys. 11.3b. Pod wpływem napięcia UBB w obwodzie B2-B1 płynie prąd
IB, który daje spadek napięcia na rezystorze rB1
U E ' I B rB1 U BB rB1 /( rB1 rB 2 ) U BB ; rB1 /( rB1 rB 2 ) wew. wsp. podzialu
~0.6
Napięcie UE’ polaryzuje dodatnio katodę diody D, która może przewodzić, gdy napięcie
anody: U E U E ' B ( B 0.5...0.7 V dla Si) . Dla UE<UE’+B przez diodę D
spolaryzowaną zaporowo płynie bardzo mały prąd wsteczny. Gdy UE>UE’+B, przez diodę
zaczyna płynąć duży prąd przewodzenia. Gdyby rB1 było stałe, dalszy wzrost UE
powodowałby wzrost IE zgodnie z krzywą 2, jednak rezystor rB1 zmienia wartość w efekcie
zjawiska modulacji konduktywności. Konduktywność pp typu n:
0 q( n n0 p p0 ) dla I E 0; 0 q( n n p p) dla I E 0
Dodatkowa koncentracja dziur wstrzykiwana z emitera p podnosi również koncentrację
elektronów, n, co prowadzi do wzrostu konduktywności (rB1 maleje). Im większy IE tym
mniejsze rB1. Spadek rB1 zmniejsza i napięcie UE’. Rośnie różnica |UE-UE’|, czyli prąd IE, a
większy prąd IE to mniejsze rB1 itd. (odcinek charakterystyki o ujemnej rezystancji
przyrostowej – krzywa 3):
U E U BB rB1 ( I E ) /[ rB 2 rB1 ( I E )] I E rB1 ( I E ) B
Teoretycznie najmniejsza wartość napięcia UE przy przełączeniu tranzystora ze stanu
nieprzewodzenia do przewodzenia UE~B (UE~1..3 V).
b). Podstawowe parametry
Dopuszczalne parametry graniczne: moc rozproszona PD, maksymalny prąd emitera
IE, maksymalne napięcie wsteczne złącza UE-B2, maksymalne napięcie międzybazowe UB2B1,
zakres temperatur otoczenia Ta.
Parametry charakterystyczne: wewnętrzny współczynnik blokowania (UBB),
rezystancja międzybazowa rBB (UBB=const, IE=0), napięcie nasycenia UEsat – napięcie UEB1
przy pracy w stanie przewodzenia (UBB=const, IEmax), prąd w punkcie szczytu Ip, prąd w
punkcie doliny IV.
Zastosowania – do budowy prostych układów astabilnych, np. generator relaksacyjny
– obwody sterowania tyrystorów.
8
2. Tyrystory
Podstawa klasyfikacji – liczba końcówek oraz przebieg charakterystyki napięciowoprądowej w trzeciej ćwiartce:
- stan zaporowy w III ćwiartce (praca jednokierunkowa z możliwością przełączania tylko w I
ćwiartce)
- przełączanie zarówno w I jak i w III ćwiartce (działanie dwukierunkowe).
Rodzaje tyrystorów:
- dynistor – jednokierunkowy element dwukońcówkowy,
- tyrystor triodowy – jednokierunkowy element trójkońcówkowy,
- diak – dwukierunkowy element dwukońcówkowy,
- triak – dwukierunkowy element trójkońcówkowy.
9
Najbardziej rozpowszechniony – triodowy (pp zawór sterowany) – tyrystor.
a). Tyrystory o działaniu jednokierunkowym
Mają strukturę czterowarstwową (trójzłączową) p-n-p-n.
10
Struktura p-n-p-n połączenie dwóch tranzystorów p-n-p i n-p-n. P1 – emiter tr. p-n-p, N1 –
baza tr. p-n-p i jednocześnie kolektor tr. n-p-n , P2 – kolektor tr. p-n-p i jednocześnie baza tr.
n-p-n, N2 – emiter tr. n-p-n. Złącza j1 i j3 – złącza E-B, j2 – złącze kolektorowe.
Zakresy pracy tranzystora: zaporowy, blokowania, przewodzenia.
- stan zaporowy – przy polaryzacji anody napięciem ujemnym względem katody; j1 i j3
spolaryzowane zaporowo, j2 w kierunku przewodzenia. Prawie całe napięcie wewnętrzne
odkłada się na złączu j1, warstwa zaporowa tego złącza rozszerza się w stronę słabo
domieszkowanego obszaru N1. Prąd płynący przez tyrystor = mały prąd wsteczny złączy j1 i
j3=> dioda.
- stan blokowania – przy polaryzacji anody napięciem dodatnim względem katody, gdy suma
współczynników wzmocnienia prądowego tranzystorów T1 i T2, (1+2) <1. Złącza j1 i j3
spolaryzowane w kierunku przewodzenia, j2 w kierunku zaporowym. Z obu emiterów nośniki
wstrzykiwane są do baz. Prąd w obwodzie zewnętrznym równy jest sumie prądów
składowych płynących przez j2:
I A I K , I A I g /[1 (1 2 )] (dla 1 2 0.8, I A 5I g
W stanie blokowania przez tyrystor płynie mały prąd anodowy.
Przy 1 2 →1, prąd anodowy →∞, tyrystor pracuje w stanie przewodzenia.
- stan przewodzenia – liczby elektronów i dziur dostarczane do każdej z baz nie równoważą
się – w obu bazach akumulują się ładunki. Elektrony w N1 równoważą dodatni ładunek
centrów donorowych w warstwie zaporowej złącza j2, dziury w P2 równoważą ujemny
ładunek centrów akceptorowych w warstwie zaporowej tego złącza. Szerokość warstwy
zaporowej maleje, aż złącze j2 zostaje spolaryzowane w kierunku przewodzenia. Nadmiarowe
ładunki w N1 i P2 zwiększają również napięcia polaryzujące złącza j1 i j3 w kierunku
przewodzenia. Rosną strumienie nośników wstrzykiwane przez oba emitery – rośnie prąd
anodowy i spadek napięcia na rezystorze RL. Maleje, więc napięcie na tyrystorze, rośnie prąd,
napięcie przenosi się na rezystor RL ( 1 2 =1).
W stanie przewodzenia spadek napięcia na tyrystorze = suma napięć na trzech
złączach spolaryzowanych w kierunkach przewodzenia (1 V, 1 V, 1 V). Środkowe złącze ma
przeciwną biegunowość, więc suma = 2 V.
11
Współczynnik wzmocnienia prądowego rośnie ze wzrostem prądu emitera (rośnie e i b )
Przełączanie ze stanu blokowania do przewodzenia następuje wówczas, gdy wskutek jakiejś
przyczyny wzrośnie prąd anodowy, co spowoduje wzrost 1 2 do jedności.
- W tranzystorze dwukońcówkowym
= powielanie lawinowe nośników w warstwie zaporowej złącza j2 przy odpowiednio dużym
UAK; liczba nośników wychodzących z j2>od liczby nośników wchodzących,
12
I A MI g /[1 M ( 1 2 )]; M [1 (U AK / U p ) n ]1 ; U p napiecie przebicia
Pr zelaczenie , U AK dla M ( 1 2 ) 1
= wzrost prądu Ig ze wzrostem temperatury pod wpływem oświetlenia lub promieniowania,
Ig↑IA↑
= przepływ prądu pojemnościowego przy gwałtownej zmianie napięcia anoda-katoda; polega
na ładowaniu pojemności Cj złącza j2, co oznacza chwilowy przepływ dużego prądu
anodowego: iA=Cj*duAK/dt i prowadzi do spełnienia warunku 1 2 =1.
Powrót do stanu zablokowania następuje, gdy prąd anodowy zmaleje poniżej wartości
krytycznej (prąd trzymania), 1 2 <1.
- W tranzystorze trójkońcówkowym (anoda, katoda, bramka):
Ponieważ: I K I A I G ; wiec I A M ( I g 2 I G ) /[1 M (1 2 )]
Oprócz trzech w/w sposobów przełączania w tym tranzystorze istnieje jeszcze jeden =
wzrost prądu anodowego wskutek przepływu prądu bramki. Dla różnych wartości tego prądu
otrzymuje się rodzinę charakterystyk napięciowo-prądowych (rys. 11.14)
b). Tyrystory dwukierunkowe (struktura pięciowarstwowa n-p-n-p-n – superpozycja
dwóch struktur czterowarstwowych p1 n1 p2 n2 oraz p2 n1 p1 n3)
13
Taki tyrystor ma symetryczne właściwości dla obu polaryzacji anoda-katoda. W triaku za
pomocą sterowania prądem w obwodzie bramki można regulować wartość napięcia
przełączania. Przełączanie do stanu przewodzenia dodatniego lub ujemnego odbywać się
może przez wysterowanie obwodu bramki zarówno prądem dodatnim jak i ujemnym.
c). Parametry tyrystorów
- parametry graniczne
= dopuszczalny prąd anodowy w stanie przewodzenia IA(AV),
= graniczne napięcie anodowe w stanie zaporowym BUAK,
= moc admisyjna lub opór cieplny,
- parametry charakterystyczne
= maksymalne napięcie przełączania UA0 mierzone przy zerowym prądzie bramki,
= prąd trzymania IH (minimalna wartość prądu anodowego, przy której tranzystor nie wyłącza
się ze stanu przewodzenia do stanu blokowania),
= prąd przełączający bramki IGT dla określonego napięcia UAK
- parametry dynamiczne
= czas włączania (przedział czasu od czoła impulsu przełączającego bramki do chwili, gdy
prąd anodowy osiągnie 90% wartości ostatecznej),
= czas wyłączania (przedział czasu od chwili, gdy prąd anodowy zmaleje poniżej prądu
trzymania do chwili, gdy bramka odzyska swoje właściwości sterujące (>twł).
d). Zastosowania
W układach zasilania w celu sterowania dużych mocy małymi.
14