POLITECHNIKA CZĘSTOCHOWSKA
Wydział Inżynierii Mechanicznej i Informatyki
Sprawozdanie z przedmiotu
„Podstawy robotyki”
Temat: Roboty mobilne
Artur Krupski
Grupa IV
Studia zaoczne
Wiadomości wstępne o robotach
Robot jest to urządzenie techniczne przeznaczone do realizacji niektórych czynności
manipulacyjnych, lokomocyjnych, informacyjnych i intelektualnych człowieka; częścią
wykonawczą współczesnych robotów są manipulatory (pełniące funkcje kończyn górnych)
oraz pedipulatory lub maszyny kroczące (pełniące funkcje kończyn dolnych); częścią
napędową i sterującą są silniki, czujniki (sensory) i komputerowy układ sterowania; ważną
grupę robotów stanowią roboty przemysłowe - programowane, wielofunkcyjne maszyny
stosowane m.in. w przemyśle maszynowym, elektrycznym, precyzyjnym, do prac pod wodą;
najnowsze roboty (tzw. III generacji) są wyposażone w układy wielosensorowe pełniące
funkcje zmysłów wzroku, dotyku, słuchu i w układy sztucznej inteligencji.
Robotyka mobilna w instytucie automatyki i robotyki
Obecnie miniaturowe roboty mobilne znajdują coraz więcej zastosowań. Używane są w
systemach dozoru, do penetracji i identyfikacji nieznanego i niebezpiecznego terenu, w
transporcie elementów wewnątrz hal zakładów przemysłowych. Placówki naukowe stosują je
do badań nad algorytmami sterowania oraz nawigacji. Na wielu uniwersytetach w Europie
Zachodniej, Stanach Zjednoczonych i Japonii zespoły inżynierów i studentów zajmują się
konstruowaniem i badaniem miniaturowych robotów mobilnych. Prace te przynoszą ciekawe
wyniki. Opracowane rozwiązania techniczne nierzadko znajdują zastosowanie w przemyśle.
Z tych powodów w Instytucie Automatyki i Robotyki Politechniki Warszawskiej w 1999 roku
rozpoczęto prace badawcze związane z Robotyką Mobilną. Prac te zaowocowały powstaniem
dwóch typów robotów: [DRM] Dydaktycznego Robota Mobilnego oraz [MRI] Miniaturowego Robota Inspekcyjnego. DRM wykorzystywany jest do zajęć dydaktycznych.
Podczas zajęć z Podstaw Robotyki studenci specjalności Robotyka i Automatyka
Przemysłowa mają możliwość zapoznać się z zagadnieniami związanymi z robotyką mobilną
(budowa
robotów,
struktura
układu
sterowania,
systemy
nawigacyjne).
Wiele tematów prac dyplomowych prowadzonych w IAiR związanych jest z robotyką
mobilną. Podczas tych prac studenci pracują nad rozwijaniem konstrukcji oraz systemów
nawigacji i sterowania robota. Ich prace wykorzystywane są podczas zajęć dydaktycznych.
Roboty MRI przeznaczone są głównie do prac badawczych związanych z zagadnieniami
sterowani nawigacji robotów mobilnych. Ich małe wymiary, modułowa budowa predysponuje
je do tego typu zadań.Dodatkowo przystosowane są wykonywania do zadań inspekcyjnych w
miejscach ciężko dostępnych i niebezpiecznych dla człowieka. Roboty te mogą być sterowane
poprzez
Internet,
co
jest
przydatne
w
zadaniach
inspekcyjnych.
Prowadzone są badania nad robotami kroczącymi. Powstający robot będzie posiadał sześć
niezależnych odnóży. Dzięki niemu możliwe staną się badania nad algorytmami sterowania i
nawigacji tego typu robotów. Badania tego typu przyczynią się do powstawania nowych
generacji robotów mobilnych.
Miniaturowy robot mobilny
Miniaturowy robot mobilny robot ma wymiary 225 x 174 x 235 mm. Robot ma strukturę
modułową typu "SANDWICH". Można wyróżnić w niej moduł napędowy -platformę jezdną,
moduł sterujący oraz moduł obserwacyjno - wykonawczy. Taka budowa zapewnia łatwy
dostęp do wszystkich zespołów urządzenia, pozwala na wymianę poszczególnych modułów
nie wpływając na inne elementy. W zależności od zaistniałej potrzeby możliwe jest tworzenie
kolejnych wersji robota z różnymi modułami posiadającymi odpowiednie oprzyrządowanie,
zależnie od przewidywanych zadań. Platforma mobilna robota została zaprojektowana ma
podwoziu gąsienicowym. Złożona jest z kadłuba wykonanego z aluminium oraz dwóch
zespołów napędowych napędzających prawą i lewą gąsienice. Każdy z dwóch zespół
napędowych składa się z trzech jednakowych kół o średnicy 54 mm wykonanych z
duraluminium. Gąsienice wykonane są z twardego poliuretanu wzmacnianego stalowymi
linkami. Zapewniają dobrą przyczepność do szorstkich podłożach i dużą trwałość. Oba
zespoły napędzane są przez dwa silniki prądu stałego o napięciu znamionowym 12V, ze
zintegrowanymi reduktorami prędkości. Reduktory mają przełożenie 75:1 i pozwalają na
uzyskanie maksymalnego momentu obrotowego równego 0.5 Nm. Silniki wyposażono w
optoelektroniczne przetworniki obrotowo - impulsowe. W kadłubie w zależności od potrzeb
można umieścić pakiet akumulatorów, zasilających robota podczas autonomicznego trybu
pracy. Budowa podwozia pozwala na pokonywanie przeszkód poprzecznych do wysokości 25
mm oraz podjazdów o nachyleniu do 30°. Moduł sterowania został umieszczony
bezpośrednio nad kadłubem. Składa się z duralowej obudowy przykrytej metapleksową
pokrywą. Przymocowany jest do modułu napędowego za pomocą specjalnych klamer, dzięki
którym, jeśli zajdzie potrzeba można go w prosty i szybki sposób odłączać. Wewnątrz
znajduje się mikroprocesorowy sterownik kontrolujący pracę robota. W ściankach obudowy
znajdują się okienka, w których zostały umieszczone czujniki działające w paśmie
podczerwieni służące do lokalizowania przeszkód wokół robota. Moduł obserwacyjno wykonawczy znajduje się nad modułem sterowania. Składa się z czarno-białej kamery CCD
wspomaganej oświetlaczami w zakresie podczerwień i z nadajnika służącego do
przekazywania obrazu do komputera nadrzędnego. Kamera zamocowana została na
obrotowym statywie, mogącym obracać się w dwóch osiach. Osie statywu poruszane są za
pomocą dwóch modułowych serwomechanizmów, dzięki czemu kamera może obracać się
automatycznie w poziomie w zakresie 90° oraz w pionie w zakresie 60°. Istnieje możliwość
instalacji mikrofonu sprzężonego z kamerą, co przy niektórych rodzajach zadań jest dużym
udogodnieniem.
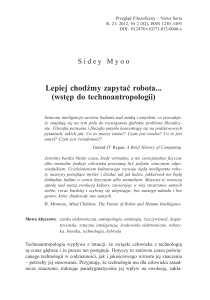
Miniaturowy Robot Inspekcyjny [MRI R1]- rysunek poglądowy
Układ sterowania
Głównym elementem układu sterowania jest jednostka centralna. Jednostka centralna oraz
pozostałe elementy układu sterowania zasilane są z układu zasilania. Układ ten pozwala na
zasilanie sterownika w bardzo szerokim zakresie napięć zasilania (8..48VDC). Układy
sterowania silników pozwalają na realizację pracy nawrotnej. Układy te pracują w
klasycznym układzie mostkowym i są sterowane przez jednostkę centralną metodą modulacji
szerokości impulsu. Prędkość obrotową silników mierzona jest przez zliczanie w
jednostkowych odcinkach czasu impulsów z fotooptycznych przetworników obrotowoimpulsowych zainstalowanych na wałkach silników napędowych. Dzięki temu w układzie
sterowania napędu silników możliwe jest zrealizowanie układów automatycznej regulacji
prędkości, różnicy prędkości i przemieszczenia kątowego.
Jednostkę centralną tworzy pojedynczy układ mikrokontrolera jednomodułowego typu
MSP430F149 firmy Texas Instruments. Jądrem mikrokontrolera jest szesnastobitowa
jednostka arytmetyczno-logiczna o architekturze ortogonalnej ze zredukowaną listą rozkazów
(RISC). Mikrokontroler posiada wewnętrzną reprogramowalną pamięć programu typu flash o
pojemności 60 KB oraz 2KB pamięci o swobodnym dostępie typu RAM. Mikrokontroler
zasilany jest ze źródła o napięciu 3,3V pobierając moc rzędu 5mW przy częstotliwości
oscylatora kwarcowego równej 4,9152MHz. Mikrokontroler zawiera ponadto szereg
dodatkowych modułów w tym:
o
o
o
o
o
10 układów 16 bitowych modulatorów PWM
2 moduły dwukierunkowej, jednoczesnej transmisji szeregowej
12 kanałowy 12-to bitowy kompensacyjny przetwornik analogowo-cyfrowy
porty wejść/wyjść cyfrowych
układ pomiaru temperatury
Mikrokontroler przystosowany jest do pracy w zakresie temperatur (-40 ..+85°C) określanych
powszechnie zakresem "temperatur przemysłowych".
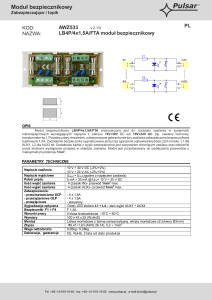
Układ zasilania jest układem dwustopniowym. Pierwszy stopień zasilania tworzy hybrydowa
wysokosprawna przetwornica DC/DC o prądzie jałowym niezależnym od obciążenia i nie
przekraczającym wartości 5 mA. Przetwornica jest źródłem napięcia +5,0V koniecznych do
zasilania niektórych elementów układu sterownika. Do zasilania mikrokontrolera i układów z
nim współpracujących wykorzystywane jest napięcie 3,3V. Napięcie to powstaje w
stabilizatorze liniowym charakteryzującym się bardzo niskim prądem biegu jałowego (rzędu
15mA) i podobnie jak w przypadku przetwornicy DC/DC niezależnego od obciążenia.
Pierwszy stopień zasilania umożliwia zasilanie układu sterowania w bardzo szerokim zakresie
napięć wejściowych (8..48V). Ponadto zapewnia ochronę przed odwrotną polaryzacją
napięcia zasilania, posiada zabezpieczenie przeciwzwarciowe oraz zabezpieczenie termiczne.
Stopień drugi układu zasilania jest zabezpieczony przed skutkami nawet długotrwałego
zwarcia. W rezultacie układ zasilania skonstruowany został w taki sposób, aby spełnić
wymogi energooszczędności i wysokiej niezawodności eksploatacyjnej. Podobnie jak
pozostałe elementy układu sterowania napędu układ zasilania może pracować w zakresie
temperatur (-40 ..+85°C).
Układ sterowania napędów zaopatrzono w trzy opcjonalne interfejsy transmisji szeregowej:
RS485, CAN 2.0B, RS232C. Dwa pierwsze przeznaczone są do zastosowań przemysłowych,
ostatni do badań laboratoryjnych. Interfejs umożliwia dwukierunkową naprzemienną
transmisję szeregową danych z prędkościami transmisji w zakresie 1 200..76 800Bd. Interfejs
umożliwia sprzężenie jednostki sterowania napędami z zewnętrzną jednostką nadrzędną typu
master drogą radiową (radiomodem) lub przez bezpośrednie połączenie kablowe. W warstwie
aplikacyjnej zaimplementowano ogólnie znany i zweryfikowany w warunkach
przemysłowych protokół komunikacyjny MODBUS-RTU zapewniający dostatecznie wysoki
poziom bezpieczeństwa transmitowanych danych. Dla minimalizacji zużycia energii w kanale
RS232 zastosowano energooszczędny układ z funkcją auto-shutdown, zaś w kanale RS485
układ sterownika magistrali o poborze prądu wynoszącym zaledwie 0,3mA.
Do napędu silników zastosowano scalone sterowniki prądu stałego typu A3953 firmy Allegro.
Sterowniki te pracują w klasycznym układzie pełno mostkowym umożliwiającym nawrotną
pracę silnika włączonego w przekątną mostka. Diody gaszące zintegrowane są ze strukturą
układu. Układ pozwala na zewnętrzne programowanie prądu maksymalnego płynącego przez
silnik. W przypadku opisywanego sterownika programowanie polega na przyłączeniu
odpowiedniego rezystora zewnętrznego. W układzie sterowania ograniczono ten prąd do
wartości 1A. Układ A3953 zapewnia wysoką niezawodność przy współpracy z silnikiem.
Posiada zabezpieczenia przeciążeniowe, przeciwzwarciowe, przed odwrotną polaryzacją
napięcia zasilania oraz zabezpieczenie przed przegrzaniem struktury. Układ sterownika
silnika sterowany jest bezpośrednio z jednostki centralnej w trybie 16-to bitowego
programowalnego układu modulacji szerokości impulsu. Układ A3953 nie zapewnia liniowej
charakterystyki statycznej przetwarzania. Skuteczna kompensacja tej nieliniowości możliwa
jest do uzyskania w zasadzie dopiero w układzie sterowania ze sprzężeniem zwrotnym.
Do pomiaru rzeczywistej prędkości obrotowej silników w miniaturowym robocie
skonstruowano prosty przetwornik oborotowo-impulsowy. Przetwornik ten składa się z tarczy
zaopatrzonej w 24 otwory osadzonej bezpośrednio na wałku silnika napędowego oraz układu
fotooptycznego pracującego w zakresie bliskiej podczerwieni. Impulsy przetwornika
obrotowo-impulsowego zliczane są przez jednostkę centralną w określonych jednostkowych
odcinkach czasu. W ten sposób wyznaczana jest uśredniona prędkość obrotowa silnika w
odcinku jednostkowym czasu. Ponieważ przełożenie mechaniczne wewnętrznej przekładni
silnika napędu robota wynosi 1:75, stąd teoretyczna rozdzielczość kątowa wynosi 1800
impulsów na pełny kąt obrotu koła napędowego gąsienicy robota.Prędkość ta jest w
przybliżeniu liniowo zależna od napięcia zasilania. W celu wyeliminowania wpływu wahań
wartości napięcia zasilania oraz wpływu chwilowych obciążeń na prędkość obrotową
silników konieczne jest zastosowanie układów automatycznej regulacji prędkości. Pomiar
prędkości obrotowej wału silnika stwarza możliwości konstrukcji takich układów.
Układ sterowania napędu robota mobilnego sterowany jest przez zewnętrzną, nadrzędną
jednostkę sterującą. Dla celów komunikacyjnych wybrano protokół MODBUS-RTU dobrze
ugruntowany w praktyce przemysłowej. W przypadku układu napędu robota przyjęto skrajnie
zredukowaną listę rozkazów standardu MODBUS-RTU. Zaimplementowano tylko dwa, ale
wystarczające do obsługi układu sterującego symetryczne rozkazy RTU a mianowicie:
o
o
rozkaz czytania rejestrów (funkcja 03)
rozkaz zapisu rejestrów (funkcja 16)
Sterownik traktowany jest jako typowe urządzenie podporządkowane (slave) o
programowalnym adresie z zakresu 1..247 i programowalnej prędkości transmisji z zakresu
1200..76800 Bd. Domyślny adres jest równy 1, zaś domyślna prędkość transmisji jest równa
9600Bd.
W strukturze wewnętrznej interfejsu RTU sterownika wyróżniono 30 szesnastobitowych
rejestrów RTU. Wszystkie rejestry są rejestrami typu zapis-odczyt, choć ze względów
praktycznych wygodnie podzielić je na trzy grupy:
o
o
o
rejestry typu odczyt-zapis
rejestry typy tylko odczyt
rejestry typu tylko zapis
Przykładem rejestrów typu odczyt-zapis są np.: rejestry słowa stanu sterowania umożliwiające
między innymi bezpośredni dostęp do układów sterowania silników, czy uruchamiające
sygnał dźwiękowy.
Typowymi rejestrami typu tylko-odczyt są rejestry informujące o bieżącej wartości prędkości
obrotowej każdego z silników czy rejestry informujące o drodze kątowej pozostałej do
przebycia w przypadku wykorzystania regulatora przemieszczenia kątowego.
Rejestry wartości zadanych prędkości obrotowej silnika, lub rejestry przechowujące wartość
zadaną drogi kątowej wału silnika należą do grupy typowych rejestrów typu tylko zapis.
Wizyjne systemy do samolokalizacji
System nawigacji autonomicznego robota mobilnego składa się z następujących
elementów: detekcja przeszkód, znajdowanie wolnej drogi prowadzącej z miejsca w którym
znajduje się robot do miejsca docelowego, określenie pozycji robota oraz realizacja
wyznaczonej ścieżki. W naszych eksperymentach wykorzystywany był robot mobilny B-14,
wyposażony w 16 sonarów,16 czujników podczerwieni, komputer z procesorem Pentium oraz
jedną kolorową kamerę. Mapa otoczenia jest reprezentowana jako siatka prostokątnych
komórek i budowana jest na podstawie danych pochodzących z sonarów i czujników
podczerwieni. Każda komórka może przyjmować jeden ze stanów: wolna, zajęta lub
nieznana. Mapa jest budowana przyrostowo przy użyciu rozmytej metody agregacji [9].
Metoda agregacji wymaga znajomości aktualnego położenia robota w otoczeniu. Dlatego
samolokalizacja, oparta na danych otrzymywanych z sensorów jest kluczowym komponentem
systemu sterowania robota mobilnego. Prezentujemy system nawigacji, w którym do
wyznaczenia położenia robota są stosowane sztuczne znaczniki Pokazujemy
eksperymentalnie, że wynikowa metoda może być stosowana do lokalizacji robota mobilnego
w częściowo znanym otoczeniu.
Planowanie ścieżek z wykorzystywaniem sieci neuronowej komórkowej
Problem planowania ścieżki jest definiowany następująco: znając położenie robota i celu
trzeba planować ciągłą i bezkolizyjną ścieżkę prowadzącą od celu do aktualnego miejsca
robota.
Zastosowano metodę dyfuzyjną. Metoda ta, zaproponowana przez Steels w 1988 r., została
zaimplementowana przez B. Siemiątkowską w 1994 r. Ta implementacja pozwala na
planowanie ścieżek w czasie rzeczywistym. Jej zaletą jest m. in. brak problemu lokalnych
minimum. Metoda jest szczególnie efektywna w przypadku, gdy wokół robota występuje
wiele
przeszkód.
Sieć komórkową wykorzystywano również w przetwarzaniu obrazów [12] i samolokalizacji
mobilnych robotów [9].
D-histogramy w systemie samolokalizacji
C-histogramy są nową metodą samolokalizacji robotów mobilnych wyposażonych w
laserowy czujnik odległości. W metodzie tej stosując transformatę Hough'a[1][13] i w
otoczeniu robota poszukuje się kierunków głównych. Zmiana kierunków głównych określa
jak zmieniła się orientacja robota. Opisaną metodę zaimplementowano w postaci liniowej
sieci komórkowej, dzięki czemu może być ona stosowana w czasie rzeczywistym.
Tworzenie rastrowych map otoczenia robota mobilnego
Mapa otoczenia robota mobilnego jest tworzona na podstawie wskazań czujników
odległości - sonarów lub lasera. W prowadzonych badaniach przyjeto rastrową metodę
reprezentacji zaproponowaną przez Elfes'a i Moravec'a. Mapa jest reprezentowana jako
prostokątna tablica liczb, każda klatka tablicy reprezentuje pewien podobszar otoczenia, a
odpowiedznia liczba określa poziom wiarygodności hipotezy, że podobszar jest zajęty przez
przeszkodę. Informacje pochodzące z różnych żródeł sš agregowane. Testowano następujące
metody agregacji: metodę Bayes'a, agregację rozmytą i teorię Shaffera-Dempstera.