Zasilacze
Układy zasilające
Zasilacz – urządzenie, służące do dopasowania dostępnego napięcia do wymagań zasilanego
urządzenia. Ze względu na sposób zmiany wielkości napięcia wyróżnić można:
•zasilacze transformatorowe w których elementem dopasowującym jest transformator,
•zasilacze beztransformatorowe dopasowujące napięcie przy użyciu różnego rodzaju
elementów elektronicznych.
Ze względu na jakość napięcia wyjściowego wyróżniamy:
•zasilacze stabilizowane w których napięcie utrzymywane jest na stałym poziomie,
niezależnie od fluktuacji prądu,
•zasilacze niestabilizowane w których napięcie na wyjściu może ulegać zmianie, zależnie od
fluktuacji prądu.
Zasilacze budowane są jako uniwersalne lub specjalizowane do konkretnych zastosowań, np.:
•zasilacz komputera.
Zasilacz prądu stałego - transformatorowy, zbudowany jest z: transformatora zmieniającego
napięcie zasilające (np. 230 V) na żądane napięcie (np. 24 V). Napięcie to jest prostowane
poprzez diodę (prostownik półokresowy), lub mostek Graetza składający się z czterech diod
(prostownik pełnookresowy). Wyprostowane napięcie może być wygładzone poprzez filtry
składające się z cewki, opornika, dławika i kondensatorów elektrolitycznych i stabilizowane za
pomacą układu z diodą Zenera lub scalonych układów stabilizujących.
Popularne zasilacze transformatorowe występują najczęściej w obudowie zawierającej wtyk
sieciowy i są wkładane bezpośrednio do gniazda sieciowego.
Prostowniki
Niesterowalne
Sterowalne
(zamiast diód tyrystory)
Stabilizatory
Stabilizator to układ elektroniczny, którego zadaniem jest utrzymywanie na wyjściu stałego
napięcia (stabilizator napięcia) lub prądu (stabilizator prądu) niezależnie od obciążenia układu i
wahań napięcia zasilającego. W praktyce stabilizatory prądu buduje się w oparciu o stabilizatory
napięcia.
Stabilizatory dzielą się na dwie główne grupy:
•O działaniu ciągłym, tzn. starające się utrzymać cały czas napięcie wyjściowe na zadanym
poziomie. Charakteryzujące się małą sprawnością energetyczną (ok. 30%).
•O działaniu impulsowym, tzn. utrzymujące na wyjściu średnią wartość napięcia
zasilającego na zadanym poziomie. Stabilizatory tego typu charakteryzują się dobrą
sprawnością energetyczną (ponad 90%), ale ich konstrukcja jest skomplikowana i ponadto
ze względu na sposób działania wprowadzają dodatkowe zakłócenia. Zasilacze ze
stabilizatorami impulsowymi są powszechnie stosowane w domowych komputerach.
Najprostszym stabilizatorem napięcia jest układ z
wykorzystaniem diody zenera. Takie i podobne
układy nazywane są również stabilizatorami
parametrycznymi.
widać że zmiany napięcia wejściowego DUwe
pociągają za sobą zmiany prądu diody DID, to
jednak nie pociąga za sobą dużych zmian napięcia
wyjściowego DUwy i można przyjąć, że pozostaje
ono stałe i równe napięciu zenera UZ.
Lepszym rozwiazaniem układu jest jego
modyfikacja
Jest to układ wzbogacony o tranzystor T
pracujący w jako wtórnik emiterowy. Na
wyjściu tego układu pojawia się napięcie równe
Uwy=UZ- UBE
Korzyścią z zastosowania tranzystora jest to,
że można zwiększyć rezystor R nie powodując
zmniejszenia prądu wyjściowego, ponieważ
nawet przy bardzo małym prądzie bazy IB,
który jest dla diody D prądem obciążenia, prąd
wyjściowy Iwy jest duży i można go przedstawić
wzorem
Iwy=IB· (b + 1)
Układ ten jak widać jest trochę lepszym
układem niż poprzedni, lecz jego zastosowanie
ogranicza się również do prostych i nie
wymagających układów.
Sprzężenie zwrotne ujemne
Sprzężenie zwrotne ujemne stanowi fundamentalny mechanizm samoregulacyjny. Z cybernetycznego punktu
widzenia ma ono za zadanie utrzymanie wartości jakiegoś parametru na zadanym poziomie. Zachodzi ono
wtedy, gdy jakiekolwiek zaburzenia powodujące odchylenie wartości parametru od zadanej wartości w
którąkolwiek stronę indukują działania prowadzące do zmiany wartości parametru w stronę przeciwną (stąd
nazwa "ujemne"), a więc do niwelacji (kompensacji) efektu tego odchylenia.
Mówiąc obrazowo: wartość parametru sprzężonego ujemnie zachowuje się jak niewielka kulka na dnie
półkulistego zagłębienia: każde wytrącenie jej z równowagi powoduje powtórne staczanie się w kierunku
najniższego punktu, pośrodku zagłębienia. W przypadku sprzężenia zwrotnego ujemnego wartość parametru
oscyluje więc wokół wartości zadanej.
Sprzężenia zwrotne ujemne występują powszechnie w organizmach żywych i urządzeniach technicznych,
jako mechanizmy samoregulacji.
Sprzężenie zwrotne dodatnie
Sprzężenie zwrotne dodatnie polega na tym, że w sytuacji zakłócenia jakiegoś parametru w układzie, układ
ten dąży do zmiany wartości parametru w kierunku zgodnym (stąd - "dodatnie") z kierunkiem, w którym
nastąpiło odchylenie od "zadanej" wartości. Sprzężenie zwrotne dodatnie powoduje zatem narastanie
odchylenia.
Mówiąc obrazowo: wartość parametru sprzężonego dodatnio zachowuje się jak niewielka kulka na szczycie
półkulistego wzniesienia: każde wytącenie jej z równowagi powoduje coraz szybsze staczanie się w
kierunku, w którym nastąpiło wytrącenie, aż do wypadnięcia kulki poza układ (o ile nie zadziała odrębny
bodziec hamujący). W sprzężeniu zwrotnym dodatnim wartość parametru odchyla się więc od wartości
"zadanej" tym szybciej, im dalej już się od niej znajduje.
Sprzężenie zwrotne dodatnie stosuje się w:
•generatorze drgań
•detektorze reakcyjnym
Układy ze sprzężeniem zwrotnym
Tego typu stabilizatory są chyba najbardziej
rozpowszechnionymi układami zasilającymi
urządzenia małej i średniej mocy. Wszystkie
stabilizatory liniowe ze sprzężeniem zwrotnym,
zarówno w postaci scalonej jak i budowane z
elementów dyskretnych muszą składać się z
następujących bloków:
•elementu regulacyjnego
•wzmacniacza błędu
•źródła napięcia odniesienia (lub inaczej źródła referencyjnego)
•układu próbkującego
Istotą działania stabilizatorów ze sprzężeniem zwrotnym jest to, że układ dzięki
mechanizmowi sprzężenia zwrotnego śledzi zmiany napięcia wyjściowego i
przeciwdziała im w taki sposób aby napięcie wyjściowe pozostało niezmienne. Jak to
się dzieje? Napięcie wyjściowe jest podawane poprzez układ próbkujący na wejście
wzmacniacza błędu. Ukłądem próbkującym jest układ dzielnika napięcia złożony z
rezystorów R2 i R3. Napięcie na wejściu wzmacniacza błędu wynosi więc
UR3=g · Uwy
Na drugie wejście wzmacniacza błędu podawane jest napięcie wzorcowe Uref (lub
jak kto woli referencyjne czy też odniesienia). Różnica napięć na wejściach
wzmacniacza błędu nazywana jest sygnałem błędu. Sygnał błędu jest
wzmacniany i podawany (w przeciwnej fazie do zachodzących zmian na wyjściu
stabilizatora) na wejście elementu regulacyjnego, czyli na bazę tranzystora T.
Jeżeli napięcie na wyjściu stabilizatora "chce" z jakichś powodów zwiększyć się, to
sygnał błędu powoduje zmniejszenie wysterowania tranzystora T i co za tym idzie
zmniejszenie napięcia wyjściowego (gdyż zwiększa się napięcie UCE tranzystora
T), podobnie przy zmniejszaniu napięcia wyjściowego tranzystor T jest bardziej
wysterowany i napięcie na wyjściu ulega zwiększeniu (napięcie UCE zmniejsza
się). Tak właśnie działa ujemne napięciowe sprzężenie zwrotne zastosowane w
układach stabilizatorów liniowych (ze sprzężeniem zwrotnym oczywiście).
Filtry
Filtr jest to fragment obwodu elektrycznego lub obwodu elektronicznego
odpowiedzialny za przepuszczanie lub blokowanie sygnałów o określonym zakresie
częstotliwości lub zawierającego określone harmoniczne.
Ze względu na przeznaczenie filtry można podzielić na cztery podstawowe rodzaje
•dolnoprzepustowe
•gónoprzepustowe
•środkowoprzepustowe
•Środkowozaporowe
Ze względu na konstrukcję i rodzaj działania filtry można podzielić na:
•pasywne - nie zawierają elementów dostarczających energii do obwodu drgajacego, zawierają tylko
elementów RLC
•jednostopniowe
•wielostopniowe
•aktywne - zawierają zarówno elementy RLC, jak również i elementy dostarczające energię do
filtrowanego układu np. wzmacniacze, układy nieliniowe.
Filtry można również podzielić na typy obwodów w jakich są używane:
•analogowe
•cyfrowe
Filtr dolnoprzepustowy to układ elektroniczny, optyczny, akustyczny lub inny element przetwarzający
sygnał (np. odpowiedni algorytm) przepuszczający częstotliwości sygnału poniżej ustalonej częstotliwości
granicznej, tłumi składowe widma leżące w górnej jego części. Układ elektroniczny zbudowany jest
zazwyczaj z cewki lub opornika i kondensatora. Ma jedno pasmo przepustowe i jedno tłumiące. Filtr
dolnoprzepustowy jest układem całkującym stratnym. Wielkością charakteryzującą taki układ jest
transmitancja, określana jako stosunek napięcie wyjściowego do wejściowego. Często zapisuje się ją w
postaci operatorowej. G(s)=K/(Ts+1), gdzie T - stała czasowa R*C, s - operator LAplace'a = j2*pi*f.
Częstotliwość graniczna
Przedstawiony powyżej filtr dolnoprzepustowy to najprostszy
jego rodzaj. Istnieją znacznie bardziej złożone realizacje
takiego układu, posiadające różne od niego charakterystyki
(np. silniejsze tłumienie sygnału powyżej częstotliwości
granicznej).
Filtry dolnoprzepustowe są ważnym elementem technologii
cyfrowej. Przed zamianą sygnału analogowego na sygnał
cyfrowy konieczne użycie takiego filtra usuwającego z
widma sygnału częstości przewyższające częstotliwość
Nyquista.
Filtr górnoprzepustowy (ang. high-pass filter) to układ elektroniczny, (bądź algorytm) przepuszczający
częstotliwości sygnału powyżej ustalonej częstotliwości granicznej, a tłumi składowe widma leżące w dolnej
jego części.
W zależności od konstrukcji filtr taki zbudowany jest jako:
1.reaktancyjne L, C, zbudowane z cewek i kondensatorów
2.pojedyncza cewka bądź kondensator,
3.bezindukcyjne, pasywne R, C,
4.piezoceramiczne,
5.aktywne - zawierające wzmacniacze,
6.cyfrowe.
Częstotliwość graniczna
Filtr środkowoprzepustowy to układ elektroniczny, bądź algorytm przepuszczający
częstotliwości sygnału w bliskim otoczeniu ustalonej częstotliwości.
Filtr środkowozaporowy to układ elektroniczny, bądź algorytm nieprzepuszczający częstotliwości sygnału
między dwoma ustalonymi wartościami granicznymi. Jest to odwrotność filtru środkowoprzepustowego.
Może służyć między innymi do usuwania przydzwięku w sygnale elektrycznym pochodzącym od
częstotliwości prądu elektrycznego w sieci energetycznej (w Polsce jest to 50 Hz). W takim przypadku
ustawia się filtr środkowozaporowy o dolnej wartości granicznej 49 Hz i górnej 51 Hz.
Filtry pasywne są wykonane tylko z pasywnych elementów RLC. Przy odpowiednim
połączeniu elementów można uzyskać wszystkie typy filtrów
Najprostszym rodzajem filtra pasywnego szeroko stosowanego w elektronice jest filtr dolnoprzepustowy w
postaci kondensatora o dużej pojemności połączonego równolegle do filtrowanego napięcia (z ewentualnym
szeregowym opornikiem). Urządzenia elektroniczne są często zasilane z sieci energetycznej za pomocą
zasilaczy. Napięcie sieci (o skutecznej wartości 230 V) jest transformowane na niskie napięcie użyteczne (np.
12 V), które jest następnie prostowane za pomocą prostownika dwupołówkowego. Napięcie wyjściowe
takiego prostownika ma przebieg tętniący (pokazany jako niebieski na Rys. 3). Dopiero równoległe
dołączenie kondensatora o odpowiedniej pojemności powoduje znaczne zmniejszenie amplitudy tętnień
(przebieg czerwony na rysunku), czyli właśnie proces filtrowania. Im większa jest pojemność użytego
kondensatora tym bardziej napięcie wyjściowe ma przebieg zbliżony do przebiegu stałego.
Filtry aktywne wykorzystują zazwyczaj również własności elementów RLC, ale przy
wspomaganiu specjalnymi elementami sterującymi oraz dostarczającymi energię do filtrowanego
układu.
Przykład górnoprzepustowego aktywnego filtra.
Jak widać filtr taki bazuje na wzmocnionych charakterystykach elementów RC. Elementem
aktywnym jest tutaj wzmacniacz operacyjny, który posiada odrębne zasilanie (nie pokazane dla
czytelności rysunku), i które powoduje częściowe dostarczanie energii do filtrowanego układu.
Zasilacz impulsowy, zasilacz beztransformatorowy - składa się z przetwornicy częstotliwości
zamieniającej napięcie wejściowe (np. 230V) na żądane napięcie wyjściowe (np. 12V). Napięcie
to jest prostowane poprzez diodę (prostownik półokresowy), lub mostek Graetza składający się z
czterech diod (prostownik pełnookresowy). Wyprostowane napięcie może być wygładzone
poprzez specjalne filtry składające się z cewki, opornika, dławik i kondensatorów
elektrolitycznych. Zazwyczaj zasilacze impulsowe posiadają również specjalne układy
stabilizacyjne, zabezpieczenia przeciwzwarciowe i przeciwprzepięciowe.
Generatory
Wzmacniacze
Wzmacniacz elektryczny (wzmacniacz) to układ elektroniczny,
którego zadaniem jest wytworzenie na wyjściu sygnału o wartości
większej, proporcjonalnej do sygnału wejściowego. Dzieje się to
kosztem energii pobieranej z zewnętrznego źródła zasilania.
Wzmacniacze są budowane przy użyciu elementów aktywnych
(niegdyś lamp elektronowych, obecnie tranzystorów).
Ze względu na parametr sygnału, który jest wzmacniany, wzmiacniacze dzielone są na:
•wzmacniacze prądu (współczynnik wzmocnienia napięciowego równy jest 1)
•wzmacniacze napięcia (współczynnik wzmocnienia prądowego równy jest 1)
•wzmacniacze mocy (wzmacniane są równocześnie prąd i napięcie) – najczęściej stosowane
we wzmacniaczach akustycznych
Ze względu na rodzaj wzmacnianego sygnału elektrycznego stosuje się podział:
•wzmacniacze stałoprądowe (lub wzmacniacze przezbiegów wolnozmiennych)
•wzmacniacze pasmowe – wzmacniają sygnału z zadanego zakresu częstotliwości
•wzmacniacze selektywne – zakres częstotliwości jest względnie wąski
•wzmacniacze szerokopasowe
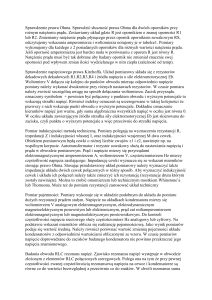
Najważniejsze parametry elektryczne wzmacniaczy to:
•współczynnik wzmocnienia prądowego
•współczynnik wzmocnienia napięciowego
•rezystancja (impedancja) wejściowa – określa jak bardzo wzmacniacz obciąża
źródło sygnału (im większa, tym lepiej)
•rezystancja (impedancja) wyjściowa – określa jak duża część wzmocnionego
sygnału zostanie "stracona" w obwodach wzmacniacza (im mniejsza, tym lepiej)
•pasmo przenoszonych częstotliwości
•stosunek sygnał/szum
Wzmocnienie prądowe – jeden z parametrów (oznaczany zazwyczaj Ki) charakteryzujących
elektroniczne układy wzmacniające. Wzmocnienie prądowe jest to stosunek prądu wyjściowego
do prądu wejściowego układu, wyrażony w amperach na amper [A/A]:
Ki[A / A] = Iwy / Iwe
lub częściej w decybelach [dB]:
Ki[dB] = 20lgKi[A / A]
Wzmocnienie napięciowe – jeden z parametrów (oznaczany zazwyczaj Ku) charakteryzujących
elektroniczne układy wzmacniające. Wzmocnienie napięciowe jest to stosunek napięcia
wyjściowego do napięcia wejściowego układu, wyrażony w woltach na wolt [V/V]:
Ku[V / V] = Uwy / Uwe
lub częściej w decybelach [dB]:
Ku[dB] = 20lgKu[V / V]
Wzmacniacze operacyjne