AKADEMIA PEDAGOGICZNA im. KEN w KRAKOWIE
INSTYTUT FIZYKI
KATEDRA ASTRONOMII
Praca Magisterska
Ocena przydatności kamery internetowej do
obserwacji gwiazd zmiennych krótkookresowych.
Mateusz Bielski
Praca napisana pod kierunkiem
dr Waldemara Ogłozy
KRAKÓW 2005
Spis treści
1. Wstęp.................................................................................................. 5
1.1 Obserwacje z powierzchni Ziemi ....................................................................... 6
1.1.1 Zanieczyszczenie nieba rozproszonym światłem .......................................... 6
1.1.2 Seeing ............................................................................................................ 7
1.1.3 Ekstynkcja atmosferyczna ............................................................................. 7
1.1.4 Refrakcja atmosferyczna ............................................................................... 8
1.2 Detektory światła................................................................................................. 8
1.2.1 Oko ................................................................................................................ 8
1.2.2 Klisza fotograficzna..................................................................................... 11
1.2.3 Fotopowielacz ............................................................................................. 14
1.2.4 Płytka mikrokanalikowa MCP .................................................................... 15
1.3 Moduł o sprzężeniu ładunkowym. Charge Coupled Devices (CCD) ............ 16
1.3.1 Matryca CCD .............................................................................................. 16
1.3.2 Zasada działania pojedynczego piksela ....................................................... 17
1.3.3 Odczyt ......................................................................................................... 18
1.3.3.1 Skanowanie postępujące (progressive-scan CCD) ..................................... 19
1.3.3.2 Transfer całego obrazka (frame-transfer CCD) ........................................ 19
1.3.3.3 Transfer poprzez interlinię (interline-transfer CCD) ............................... 19
1.3.3.4 Odczyt w czasie ekspozycji .......................................................................... 20
1.3.4 Wydajność kwantowa .................................................................................. 20
1.3.5 Liniowość .................................................................................................... 20
1.3.6 Zdolność rozdzielcza ................................................................................... 21
1.3.7 Niepożądane zjawiska związane z budowa i zasadą działania CCD i metody
ich redukcji ............................................................................................................ 22
1.3.7.1 Prąd ciemny, ciemna klatka (darkframe)................................................... 22
1.3.7.2 Gorący róg ..................................................................................................... 23
1.3.7.3 Blooming ........................................................................................................ 24
1.3.7.4 Readout Noise i Bias Frame ......................................................................... 26
2
1.3.7.5 Różnica w czułości poszczególnych pikseli, Flatfield ................................ 27
1.3.7.6 Gorące i martwe piksele ............................................................................... 28
1.4 Fotometria CCD ................................................................................................ 29
1.4.1 Metoda aperturowa ...................................................................................... 29
1.4.2 Metoda profilowa ........................................................................................ 30
1.4.2.1. Kryterium Rayleigha ............................................................................... 32
1.4.3 Metoda odejmowania obrazków.................................................................. 33
1.4.4 Pomiary absolutne i różnicowe ................................................................... 35
1.4.5 Krzywa zmian jasności i minima ................................................................ 36
1.4.6 Wielkość gwiazdowa ................................................................................... 37
1.4.7 Dni juliańskie (JD – Julian Day) ................................................................. 37
1.4.8 Poprawka heliocentryczna i heliocentryczny dzień juliański (HJD) ........... 38
1.5
Gwiazdy zmienne ............................................................................................ 38
1.5.1 Gwiazdy zmienne z przyczyn fizycznych ................................................... 39
1.5.1.1 Gwiazdy pulsujące ........................................................................................ 39
1.5.1.2 Gwiazdy wybuchowe .................................................................................... 40
1.5.2 Gwiazdy zmienne z przyczyn geometrycznych .......................................... 42
1.5.2.1 Model Roche’a .............................................................................................. 43
1.5.2.2 Układ rozdzielony ......................................................................................... 43
1.5.2.3 Układ półrozdzielony .................................................................................... 44
1.5.2.4 Układ kontaktowy ......................................................................................... 44
1.5.2.5 Gwiazdy typu Algola .................................................................................... 45
1.5.2.6 Gwiazdy typu Lyrae .................................................................................. 46
1.5.2.9 Gwiazdy typu W Ursae Maioris .................................................................. 46
1.5.2.10 Gwiazdy elipsoidalne .................................................................................. 47
2. Obserwacje gwiazd krótkookresowych kamerą
internetową........................................................................................ 48
2.1 Zestaw obserwacyjny ........................................................................................ 49
2.2 Kamera internetowa ......................................................................................... 50
2.2.1 Liniowość kamery Philips Vest Pro PCVC680K ........................................ 52
2.2.2 Szum kamery Philips Vesta Pro .................................................................. 53
2.2.3 Dynamika kamery Philips Vesta Pro ........................................................... 55
2.3 Oprogramowanie .............................................................................................. 56
3
2.3.1 Gcvs2cat ...................................................................................................... 56
2.3.1.1 Plik *.cat ........................................................................................................ 57
2.3.2 Freshcat ....................................................................................................... 57
2.3.3 Mebs ............................................................................................................ 58
2.3.3.1 Plik *.mbs ...................................................................................................... 59
2.3.4 CLR Script ................................................................................................... 60
2.3.5 AstroVideo .................................................................................................. 62
2.3.5.1 Pliki w formacie FITS (Flexible Image Transport System) ...................... 66
2.3.6 Ptelcat .......................................................................................................... 68
2.3.7 SAOImage DS9 (Deep Space 9) ................................................................. 69
2.3.8 AIP4WIN (Astronomical Image Processing) .............................................. 70
2.3.9 AVE ............................................................................................................. 70
2.3.9.1 Plik *.dat ........................................................................................................ 71
2.3.10 OC7 ........................................................................................................... 72
2.4 Proces obserwacji i redukcji. ........................................................................... 72
2.5 Redukcja i fotometria w programie AIP4WIN .............................................. 75
2.5.1 Redukcja danych ......................................................................................... 76
2.5.2 Fotometria ................................................................................................... 77
3. Otrzymane wyniki ................................................................. 81
3.1 Kryterium doboru gwiazd ................................................................................ 81
3.2 Gwiazdy.............................................................................................................. 81
3.3 Krzywe zmian jasności ..................................................................................... 81
3.3 Wyznaczone minima ......................................................................................... 88
3.3.1 U Cep ........................................................................................................... 88
3.3.2 RZ Cas ......................................................................................................... 89
4. Fotografia za pomocą kamery internetowej ..... 90
4.1 Otrzymywanie barwnych zdjęć ....................................................................... 90
5. Ocena kamery i wnioski .................................................... 95
Bibliografia ................................................................................................ 98
Załączniki ................................................................................................... 99
4
1. Wstęp
Celem niniejszej pracy jest pomoc przyszłemu obserwatorowi gwiazd
zmiennych w opanowaniu techniki fotometrii przy użyciu kamery internetowej
wyposażonej w detektor CCD oraz popularyzacja tej metody w kręgach szkolnych
i uczelnianych. Jest ona podsumowaniem obserwacji autora prowadzonych właśnie tego
typu sprzętem i kończy się oceną zarówno sprzętu, jak i metody. Fotometria przy
pomocy kamery internetowej jest identycznym procesem jaki odbywa się przy
fotometrii profesjonalnym sprzętem CCD, zatem praca stwarza możliwość poznania
metodologii badań naukowych prowadzonych we współczesnej astronomii.
Obserwacje nieba były już prowadzone przez ludzi w czasach antycznych.
Obserwowano gwiazdy, Księżyc, Słońce i zastanawiano się nad zjawiskami
zachodzącymi na niebie. Jeśli chodzi o gwiazdy zmienne to wszystko zaczęło się
w 1596 roku kiedy to David Fabricius odkrył pierwszą gwiazdę zmienną Mira Ceti. Po
niej przyszedł czas na kolejne gwiazdy zmienne, których po wprowadzeniu do użytku
teleskopów, odkrywano coraz więcej. Od tego momentu pojęcie gwiazdy zmiennej na
stałe zadomowiło się w astronomii, a same gwiazdy zmienne stały się źródłem badań
i pasji nie tylko profesjonalnych badaczy, ale i amatorów astronomii. Gwiazdy
obserwowano najpierw za pomocą nieuzbrojonego oka, potem przy pomocy lunety,
lornetek, teleskopów, aż do chwili kiedy do użytku weszły detektory elektroniczne tj.
fotopowielacze i w końcu matryca CCD. Jeszcze kilka lat temu tymi ostatnimi
5
detektorami posługiwały się profesjonalne ośrodki badawcze. Jednak postęp techniki
i miniaturyzacja spowodowały, że dziś przy użyciu CCD może obserwować tak
naprawdę każdy. Potrzebne są tylko chęci i niewielki wkład finansowy. Właśnie do tej
grupy miłośników astronomii kierowana jest ta praca. Jej celem jest zapoznanie
przyszłego badacza gwiazd zmiennych z technikami fotometrii i sposobami
wyznaczania minimów, oraz stworzenie prostej i przejrzystej instrukcji jak się do tego
wszystkiego zabrać, zaczynając od kupna i przygotowania sprzętu, a kończąc na
wyznaczeniu krzywej zmian jasności i wyznaczeniu z niej minimum.
1.1 Obserwacje z powierzchni Ziemi
Tylko nieliczni maja okazję popatrzyć w gwiazdy będąc w przestrzeni
kosmicznej. Miłośnicy astronomii, do których głównie adresowana jest ta praca,
obserwują niebo stojąc na powierzchni Ziemi. Na to co widzimy, jak widzimy i czy
w ogóle widzimy ma wpływ ziemska atmosfera.
To czy w ogóle coś widać zależy od pogody. To co widzimy jest
zdeterminowane właściwościami atmosfery. Do powierzchni Ziemi docierają bowiem
tylko fale elektromagnetyczne o długości większej niż 300 nm (co odpowiada bliskiemu
ultrafioletowi, cały zakres promieniowania widzialnego, oraz wąski przedział
promieniowania podczerwonego i fale radiowe. Cała reszta promieniowania (czyli
promieniowanie X, , UV i podczerwone) jest pochłaniana przez naszą atmosferę. Nie
mamy więc szansy go zarejestrować na powierzchni Ziemi.
Warunki obserwacyjne zależą w dużej mierze od aktualnego lokalnego stanu
atmosfery. Pogodna noc w górach nie równa się pogodnej nocy nad morzem, a pogodna
noc nad morzem nie równa się pogodnej nocy w mieście itp.
1.1.1 Zanieczyszczenie nieba rozproszonym światłem
Każdy nawet początkujący obserwator nieba dochodzi szybko do wniosku, że
liczba gwiazd widoczna na niebie dużego miasta, diametralnie różni się od liczby
gwiazd na wiejskim niebie. W tym przypadku można obserwatorów nieba przyrównać
do gatunków zwierząt, którym mocno ogranicza się tereny życiowe. Nie jest może aż
6
tak dramatycznie, niemniej jednak każdy się zgodzi, że miejsc w których jest po prostu
ciemno, jest coraz mniej. Za przykład posłużę się osobą Antoniego Wilka, który
w okresie międzywojennym odkrył cztery komety prowadząc obserwacje ze swojego
balkonu w budynku znajdującym się koło ulicy Królewskiej. Dziś raczej ciężko byłoby
cokolwiek z tego miejsca odkryć. Odpowiedź na pytanie czy to dobrze czy źle niech
każdy sobie sam odnajdzie.
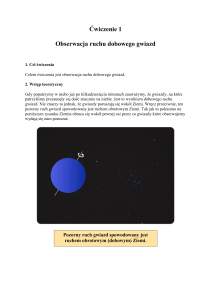
1.1.2 Seeing
Zjawisko polegające na rozmyciu obrazu gwiazdy. Na skutek turbulencji
w niskich partiach atmosfery wiązka światła docierająca
do nas z punktowego źródła jakim jest gwiazda, jest
odchylana i deformowana, w efekcie czego nie
otrzymujemy
punktowego obrazu, tylko rozmyta
plamkę. Na wartość seeingu mają wpływ dwie składowe:
niska i wysoka. Składowa niska , czyli to co dzieje tuż
przed kamerą odpowiada za to, że obraz nie jest stabilny.
Składowa wysoka spowodowana jest tym co dzieje się w górnych warstwach atmosfery
i odpowiada za rozmycie obrazu gwiazdy. Wartość seeingu podaje się w sekundach
łuku i przy wartościach rzędu 10 sekund, obserwacji raczej się już nie prowadzi .
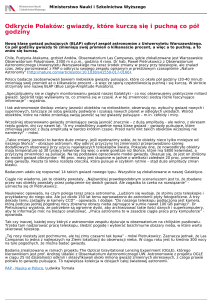
1.1.3 Ekstynkcja atmosferyczna
Nasza atmosfera pochłania i rozprasza
fale elektromagnetyczne docierające do naszej
planety. Doskonale jest to widoczne przy zachodzie
Słońca. Jest ono bardziej poczerwienione niż gdy
znajduje się w zenicie, ponieważ światło słoneczne
musi przejść przez grubszą warstwę atmosfery.
Najsłabiej rozpraszane są promienie czerwone,
zatem przy zachodzie lub wschodzie obserwujemy
czerwone Słońce, które w zenicie jest żółte. Łatwo więc wywnioskować, że ilość
rozpraszanego i pochłanianego promieniowania pochodzącego od ciał niebieskich
7
zależeć będzie od ich wysokości nad horyzontem lub inaczej od odległości zenitalnej Z
(odległość od zenitu wyrażona w stopniach łuku). Zależność tę wyraża poniższy wzór:
m pozaatm. mobserw. k x X ( Z )
(1.1)
gdzie kx nazywamy współczynnikiem ekstynkcji, a X(Z) to tzw. masa atmosferyczna.
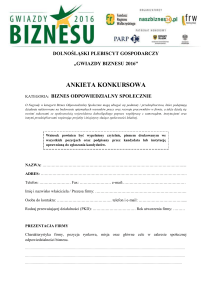
1.1.4 Refrakcja atmosferyczna
Na
skutek
refrakcji,
czyli
załamania promienia świetlnego w coraz
gęstszych warstwach atmosfery obiekty na
niebie widzimy wyżej nad horyzontem,
niż są w rzeczywistości (patrz rys.).
Obserwowalnym efektem refrakcji jest
spłaszczenie
tarczy
Słońca
przy
zachodzie. To zjawisko specjalnie nie
wpływa na jakość naszych obserwacji, niemniej jednak jego istnienie jest faktem
i każdy zajmujący się obserwacjami powinien mieć świadomość jego istnienia, dlatego
o nim wspominam.
1.2 Detektory światła
1.2.1 Oko
Oko jest detektorem w który wyposażony jest każdy z nas od samego początku
naszego życia. Główne elementy budowy oka to: tęczówka, rogówka, źrenica,
soczewka, twardówka, siatkówka i nerw wzrokowy, który przekazuje odbierany przez
oko sygnał do mózgu. Budowę oka przedstawia poniższy schemat.
8
Rys. 4. Schemat budowy oka ludzkiego1
Światło wpadające do oka biegnie przez rogówkę, komorę przednią oka,
soczewkę i ciało szkliste, a następnie pada na siatkówkę, wywołując wrażenie
wzrokowe przekazywane do mózgu. Oko może odbierać światło mieszczące się
w zakresie długości fali elektromagnetycznej od 380 do 740 nm. Ten przedział to tzw.
zakres optyczny lub zakres widzialny.
Zapożyczone ze strony internetowej:
http://www.okomedica.pl/zasoby/zdjecia/schemat2.jpg&imgrefurl=http://www.okomedica.pl/strony/budo
waoka.html&h=161&w=407&sz=13&tbnid=URegSzHkn2wJ:&tbnh=47&tbnw=119&start=32&prev=/im
ages%3Fq%3Dbudowa%2Boka%26start%3D20%26hl%3Dpl%26lr%3D%26sa%3DN
1
9
Rys. 5. Widmo optyczne2
O parametrach oka jako detektora światła decydują w głównej mierze soczewka
i tęczówka. Ta druga kurcząc się lub rozszerzając reguluje średnicę źrenicy, a co za tym
idzie, ilość światła docierającego do oka. Średnica źrenicy w zależności od ilości
światła waha się w przedziale od 1 do 10 mm. Po adaptacji przy maksymalnym
rozszerzeniu źrenicy oko potrafi wykryć strumień równy około 6 fotonów/sekundę.
Natomiast soczewka potrafi zmieniać swój kształt, w wyniku czego można obserwować
zarówno obiekty znajdujące się blisko jak i daleko. Ta zdolność soczewki nazywa się
akomodacją.
W siatkówce oka znajdują się dwa rodzaje komórek światłoczułych. Są to czopki
i pręciki. Czopki odpowiadają za widzenie kolorowe i ich czułość jest stosunkowo
niska. Wykorzystywane są głównie do widzenia w jasnym świetle. Pręciki są natomiast
dużo czulsze i wykorzystujemy je do widzenia w sytuacjach gdy światła jest mało.
Krzywa czułości oka dla pręcików różni się od krzywej czułości dla czopków. Ten fakt
wykorzystuje się w tzw. metodzie zerkania, stosowanej przez miłośników astronomii.
Zapożyczone ze stron internetowych:
http://www.oko.info.pl/pics/widmo.gif&imgrefurl=http://www.oko.info.pl/index.php%3Fbody%3D1101
&h=190&w=291&sz=4&tbnid=dvZDylAjbIsJ:&tbnh=71&tbnw=109&start=5&prev=/images%3Fq%3D
widmo%26hl%3Dpl%26lr%3D%26sa%3DG
http://www.wszpwn.com.pl/i10/bitmap/images/widmo3.jpg&imgrefurl=http://www.wszpwn.com.pl/i10/b
itmap/bm01.htm&h=77&w=384&sz=11&tbnid=jnx76FVHAz0J:&tbnh=23&tbnw=115&start=4&prev=/i
mages%3Fq%3Dwidmo%2B%25C5%259Bwiat%25C5%2582a%2Bbia%25C5%2582ego%26hl%3Dpl%
26lr%3D
2
10
Rys. 6. Krzywe czułości oka czopków i pręcików3
Warto dodać również, że kąt widzenia naszego oka wynosi 120 w poziomie
i 90 w pionie, przy czym obszar maksymalnej zdolności rozdzielczej to 20
w poziomie i 15 w pionie. Odległość najlepszego widzenia wynosi 25 – 30 cm .
1.2.2 Klisza fotograficzna
Klisza stała się powszechnie używanym przez astronomów detektorem, na
którym zapisywany jest obraz, od roku 1880. Wyróżniamy dwa rodzaje klisz
fotograficznych:
szklane
(sztywne)
i
plastikowe
(elastyczne).
Astronomowie
szczególnie upodobali sobie klisze szklane, niemniej jednak rzesze amatorów rejestruje
swoje obrazy na kliszach plastikowych, które można na co dzień kupić w sklepie
fotograficznym. Niewątpliwie plastikowa klisza jest wygodniejszym nośnikiem, biorąc
pod uwagę zarówno transport (niewielka masa) jak i wywołanie (nie potrzebujemy
w domu ciemni, można wywołać kliszę w zakładzie fotograficznym), nie wspominając
już o tym, że do utrwalania obrazów na kliszy szklanej konieczne jest posiadanie
odpowiednio do tego przystosowanego aparatu fotograficznego, którego zdobycie jest
trudne i kosztowne.
Zapożyczone ze strony internetowej:
http://www.oko.info.pl/pics/widmo.gif&imgrefurl=http://www.oko.info.pl/index.php%3Fbody%3D1101
&h=190&w=291&sz=4&tbnid=dvZDylAjbIsJ:&tbnh=71&tbnw=109&start=5&prev=/images%3Fq%3D
widmo%26hl%3Dpl%26lr%3D%26sa%3DG
3
11
Zastosowanie kliszy daje wiele korzyści m.in. zdjęcie fotograficzne jest trwałym
dokumentem, które może być wielokrotnie analizowane przez wiele osób, na zdjęciu
mamy zarejestrowany obraz dość znacznego obszaru nieba, przy długich czasach
naświetlania otrzymujemy obrazy bardzo słabych obiektów, które niejednokrotnie
w przypadku obserwacji wizualnych nie są widoczne. Dzięki tym faktom obserwacje
zarejestrowane na kliszy mają dużą przewagę nad obserwacjami wizualnymi i są
wartościowsze.
Jednym z głównych powodów dla których klisza stała się tak popularna jako
detektor, jest jej zdolność kumulowania światła. W praktyce oznacza to, że nawet
niewielka ilość światła docierająca do kliszy, jeżeli pada na nią dostatecznie długo,
może utworzyć na niej obraz. Stosuje się kilka rodzajów materiałów światłoczułych
w zależności od tego jak jasny obiekt chcemy fotografować. Możemy je podzielić pod
względem czułości na 3 grupy:
niskoczułe [50 - 100 ISO]
średnioczułe [200 - 400 ISO]
wysokoczułe [800 - 3200 ISO]
Zasada działania jest jednak we wszystkich rodzajach kliszy zarówno
szklanych jak i plastikowych bardzo podobna. Najczęściej wykorzystywaną substancją
jest zawieszony w żelatynie halogenek srebra np. bromek srebra AgBr. Jeżeli foton
o energii większej niż 2eV dostanie się do kryształku bromku srebra wzbudza elektron
i przenosi go do pasma przewodzenia. Pozostaje więc po nim dziura. Wybity elektron
zostaje szybko unieruchomiony przez defekt krystaliczny lub zanieczyszczenie
chemiczne i przyciąga dodatni jon srebra, zobojętniając go. Utworzony atom srebra
unieruchamia kolejny elektron z pasma przewodnictwa, a te neutralizują kolejne jony
srebra itd. W efekcie tworzy się wokół początkowego atomu srebra ich całe skupisko.
W chwili gdy umieszczamy kliszę w wywoływaczu, następuje zwielokrotnienie gęstości
atomów srebra na skutek redukcji halogenków do srebra metalicznego, co powoduje, że
pojawiają się nam skupiska ziarenek srebra w miejscach, gdzie światło zostało
pochłonięte. Zwielokrotnienie jest tak duże, że trzy lub cztery pochłonięte fotony mogą
spowodować osadzenie się ziarna srebra zawierającego nawet 10 miliardów atomów
srebra, w zależności od rodzaju użytej substancji. W efekcie tego w miejscu, gdzie
pochłonięte zostało promieniowanie klisza jest zaczerniona, a w pozostałych miejscach
pozostaje przezroczysta. Otrzymany obrazek nazywamy negatywem.
12
Czułość kliszy charakteryzuje tzw. krzywa charakterystyki. W większości
przypadków jest ona podobna i wygląda następująco (patrz poniżej).
Rys. 7. Krzywa charakterystyk kliszy4
Na osi x odłożono oświetlenie E (ilość energii promieniowania padającego na kliszę
w jednostce czasu na jednostkę powierzchni) w postaci logarytmicznej, a na osi y
wielkość zaczernienia kliszy D5. Na krzywej możemy zauważyć cztery strefy. Pierwsza
strefa odpowiada prądowi ciemnemu w detektorach elektronicznych. Klisza która
znajduje się w ciemnym miejscu ulega zaczernieniu. Zjawisko to ma charakter losowy.
A w przypadku słabego oświetlenia przyrost zaczernienia jest powolny i nie przekracza
woalu emulsji. Następnie (między punktem 2-3) jest strefa liniowości. W tym
przedziale klisza jest liniowa. Trzecim przedziałem (poza punktem 3) jest miejsce
w którym zachodzi zjawisko saturacji, czyli wysycania. Występuje on w momencie gdy
wiązka światła strąci niemal całe srebro w emulsji. Odpowiednikiem saturacji
w detektorach elektronicznych jest wypełnianie się studni potencjału. Na końcu (poza
punktem 4) mamy ostatni przedział w którym występuje zjawisko solaryzacji,
polegające na spadku zaczernienia przy równoczesnym wzroście oświetlenia. Czułość
spektralna kliszy jest ograniczona do fal niebieskich, ale można ją poszerzyć dodając
odpowiednie barwniki.
4
http://www.screensound.gov.au/Images.nsf/Images/curve/%24File/curve.gif&imgrefurl=http://www.scre
ensound.gov.au/glossary.nsf/Pages/Characteristic%2BCurve%3FOpenDocument&h=256&w=369&sz=9
&tbnid=cdcHjVKeJv4J:&tbnh=81&tbnw=118&hl=pl&start=4&prev=/images%3Fq%3Dagfa%2Bcurve
%26hl%3Dpl%26lr%3D%26sa%3DG
5
Z ang. Density, czyli gęstość.
13
1.2.3 Fotopowielacz
Fotopowielacz jest pierwszym prezentowanym w niniejszej pracy detektorem,
który musi być zasilany prądem elektrycznym. Zasada jego działania jest oparta na
zjawisku fotoelektrycznym zewnętrznym. Pokrótce przedstawia się ona następująco.
Foton o energii E h pada na fotokatodę fotopowielacza. Jeżeli foton posiada
wystarczającą energię to zgodnie z równaniem Einsteina:
h W
mV 2
2
(1.2)
następuje wyrwanie elektronu z powierzchni metalu fotokatody (zużyta jest do tego
energia równa pracy wyjścia), a nadmiar energii która została dostarczona przez foton,
zostaje spożytkowana na nadanie elektronowi (nazywanego fotoelektronem) energii
kinetycznej, a co za tym idzie prędkości. Następnie fotoelektrony są przyspieszane
i kierowane na dynody, które zbudowane są z materiałów o dużym współczynniku
wtórnej emisji elektronowej. Fotoelektron padając na dynodę wybija z niej kilka
elektronów wtórnych, które kierowane są na kolejna dynodę wybijając z niej kolejne
elektrony. Proces zachodzi kaskadowo, aż do momentu gdy wiązka elektronów dotrze
do anody. Stosuje się najczęściej od 7 do 14 dynod. Może tam dotrzeć w zależności od
klasy urządzenia od 104 do 1012 razy więcej elektronów niż zostało wybitych
z fotokatody. Następnie impuls napięciowy jest z anody przekazywany do układu
pomiarowego w którym nie mierzy się prądu lecz zliczane są impulsy.
Rys. 8. Schemat budowy fotopowielacza6
Zapożyczone z pracy dostępnej w internecie pod adresem:
http://www.phys.uni.torun.pl/~bezet/pdf/f_det.pdf
6
14
Fotopowielacz jest urządzeniem, które pozwala na detekcję i pomiar światła
o bardzo małym natężeniu. Jednym z parametrów charakteryzujących fotopowielacz
jest tzw. wzmocnienie prądowe. Wyraża się ono wzorem M N , gdzie to
wzmocnienie każdej dynody a N to liczba dynod. Wadą tego urządzenia jest
występowanie dużego tzw. prądu ciemnego, czyli szumu, który redukuje się poprzez
chłodzenie
urządzenia
lub
poprzez
zastosowanie
tzw.
dyskryminatorów.
Dyskryminatory odcinają impulsy o mniejszej amplitudzie, zmniejszając w ten sposób
zliczenia prądu ciemnego. Fotopowielacze stosowane są w wielu urządzeniach.
W astronomii swoje zastosowanie znalazły m.in. w fotometrach.
1.2.4 Płytka mikrokanalikowa MCP
Płytki mikrokanalikowe są to kilkumilimetrowej grubości płytki, składające się
z milionów kanalików o grubości rzędu 10 – 20 mikrometrów. Ścianki tych kanalików
pokryte są substancjami charakteryzującymi się wysokim współczynnikiem emisji
wtórnej elektronów. Na skutek różnicy potencjałów wytworzonej między elektrodami
płytki, występuje pole elektryczne wzdłuż kanalików. Proces przebiega w ten sposób, że
gdy umieści się płytkę MCP miedzy katodą a anodą, fotoelektrony wybite z katody będą
przyspieszane w polu elektrycznym kanalików. Elektrony uderzają w ścianki kanalików
wybijając z nich elektrony wtórne, powodując emisję wtórną w efekcie wzmacniając
sygnał wejściowy.
Aby uzyskiwać duże wzmocnienia nierzadko stosuje się układ kilku warstw
MCP. Dzięki zastosowaniu MCP nie tylko można rejestrować i mierzyć ilość światła,
ale również określić jego rozkład przestrzenny. Detektory CCD są często umieszczane
za płytką MCP i zbierają elektrony wylatujące z jej kanalików. MCP tak jak
fotopowielacze wykazują istnienie związanego z temperaturą prądu ciemnego, dlatego
muszą
być
chłodzone.
Jednak
w
odróżnieniu
od
fotopowielacza
płytki
mikrokanalikowe są niewrażliwe na działanie pól elektromagnetycznych. Niestety ma to
miejsce w fotopowielaczach. Następstwem może być odchylenie wiązki elektronów
wtórnych. W efekcie wiązka może nie trafić na dynodę, co spowoduje zaburzenia
sygnału. Poza tym w MCP napięcie potrzebne do uzyskania wzmocnienia sygnału jest
15
niższe niż napięcie jakie musimy przyłożyć do elektrod fotopowielacza, aby uzyskać
w nim takie samo wzmocnienie. Zastosowanie wzmacniacza sygnału jakim jest płytka
mikrokanalikowa daje nam zatem możliwość detekcji bardzo słabych źródeł światła.
Rys. 9. Schemat budowy MCP7
1.3 Moduł o sprzężeniu ładunkowym. Charge Coupled Devices (CCD)
1.3.1 Matryca CCD
Detektor ten zadebiutował w astronomii w roku 1976 i szybko stał się bardzo
popularny i szeroko stosowany w tej dziedzinie nauki. CCD rejestruje światło z bardzo
szerokiego przedziału długości fal i posiada zdolność jego kumulowania. Oprócz tego
charakteryzuje się dużą wydajnością kwantową w prawie całym przedziale czułości,
a poza tym obrazki otrzymywane z CCD można obrabiać, minimalizując w ten sposób
Zapożyczone z pracy dostępnej w internecie pod adresem:
http://www.phys.uni.torun.pl/~bezet/pdf/f_det.pdf
7
16
ich wady i braki. Można śmiało powiedzieć, że w tej chwili CCD to najlepsze narzędzie
jakim dysponują astronomowie.
CCD składa się z ułożonych jeden koło drugiego
półprzewodnikowych kondensatorów, umieszczonych na
silikonowym
podłożu
(zdjęcie
obok8).
Każdy
taki
kondensator nazywany jest fotokomórką lub pikselem. Do
każdego piksela doprowadzona jest elektroda. Pod wpływem
przyłożonego do niej napięcia wytwarzana jest studnia
potencjału w której może gromadzić się pewna ilość
ładunków.
Padający
foton,
na
skutek
Rys. 10. Matryca CCD
zjawiska
fotoelektrycznego wewnętrznego, przekazuje swoją energię elektronowi, powodując
jego ruch w kierunku elektrody naładowanej dodatnio. Tam elektron zostaje
zatrzymany. Matryca jest bardzo czuła. Już przy energii fotonu równej 1,1 eV (taką
energię posiadają fotony, gdy fala świetlna ma długość 1100 nm) następuje wybicie
elektronu ze studni. Sygnał jest zbierany z matrycy za pomocą elektrod znajdujących się
na końcu każdego rzędu pikseli i przekazywany jest stamtąd do wyjściowego
wzmacniacza.
1.3.2 Zasada działania pojedynczego piksela
Piksel jest to elementarna część całej matrycy. Powierzchnia pojedynczego
piksela jest rzędu od kilku do kilkudziesięciu m 2 . Ładunek pojedynczego piksela jest
odizolowany od sąsiednich, za pomocą napięcia przyłożonego do kanałów
przewodzących na powierzchni silikonowej. W chwili rozpoczęcia ekspozycji
kondensator ładowany jest dodatnio a następnie odłączany. Gdy foton wnika do sieci
krystalicznej silikonu, wybija elektrony na wyższy poziom energetyczny, częściowo
rozładowując kondensator. Stopień rozładowania kondensatora jest proporcjonalny do
liczby fotonów które trafiły w komórkę w czasie ekspozycji. Zatem liczba wybitych
elektronów jest proporcjonalna do strumienia światła padającego na piksel. Po
zakończeniu ekspozycji elektrony zebrane w pikselu są przemieszczane do węzłów,
wzmacniane, po czym sygnał opuszcza chip i kierowany jest do przetwornika
8
Zapożyczone ze strony internetowej: http://gjastrzebski.strony.wi.ps.pl/
17
analogowo-cyfrowego, gdzie jest przetwarzany do postaci cyfrowej. Postać cyfrowa
może być przetwarzana i analizowana przez komputer.
1.3.3 Odczyt
Aby zebrane w czasie ekspozycji dane mogły być do czegokolwiek użyte,
musza być najpierw zebrane i w odpowiedni sposób przetworzone. Cały proces
sprowadza się do zebrania wszystkich ładunków zgromadzonych w pikselach. Model
jest bardzo prosty. Realizuje się go w trzech lub czterech krokach. Zgromadzony
ładunek tkwi w studni potencjału. Jest ona na tyle głęboka, że zgromadzone w niej
elektrony nie mogą przedostać się do sąsiednich studni (1). Następnie bariera
sąsiedniego piksela jest obniżana do poziomu studni w której znajdują się elektrony, tak
aby mogły one swobodnie przepływać pomiędzy dwoma pikselami (2). Kolejnym
krokiem jest podniesienie bariery potencjału w pikselu w którym pierwotnie znajdowały
się elektrony, na skutek czego przelewają się one do studni której barierę obniżyliśmy
wcześniej (3). Zatem mamy teraz cały ładunek zgromadzony w pikselu leżącym obok
tego w którym zebrał się ładunek (4). Cały proces powtarza się cyklicznie, aż wszystkie
ładunki zostaną zebrane z matrycy. Obrazują go poniższe rysunki.
Rys. 11. Schemat transportu ładunku
Głównym problemem jest maksymalne skrócenie czasu zbierania ładunku
z chipu, aby matryca po zakończeniu ekspozycji była jak najszybciej znów gotowa do
pracy. Może to się odbywać na trzy sposoby.
18
1.3.3.1 Skanowanie postępujące (progressive-scan CCD)
Ładunki są zbierane po jednej linii. Dolna linia jest przenoszona do rejestru,
a ładunki linii położonej powyżej dolnej, przesuwane są o jedną linię w dół. Następnie
rejestr, czyli rząd dodatkowych pikseli znajdujący się na brzegu matrycy, przenosi
pojedynczo elementy linii do węzła w którym znajduje się przetwornik analogowocyfrowy. Tam rejestrowany jest ładunek. Transport odbywa się w kierunku
prostopadłym w stosunku do transferu w pozostałych rzędach. W ten sposób podając
pojedynczo elementy rejestr powoli się opróżnia. W momencie gdy rejestr jest pusty
następuje przesunięcie kolejnej linii (tej położonej najniżej) a ładunki linii położonej
wyżej znowu przenoszone są o jedna linię w dół. Cały proces powtarza się do momentu,
aż wszystkie ładunki zostaną zebrane. Kamera wyposażona w ten rodzaj chipu musi być
wyposażona w migawkę, aby w czasie odczytu do matrycy nie docierało żadne światło.
1.3.3.2 Transfer całego obrazka (frame-transfer CCD)
W tym przypadku dolna połowa matrycy musi być zasłonięta. W momencie
zakończenia ekspozycji ładunki z całej górnej odsłoniętej połowy matrycy ładunki są
natychmiast przesuwane do dolnej, zasłoniętej połowy. Dolna cześć jest następnie
sczytywana metodą skanowania postępującego (opis powyżej). Ta metoda nie wymusza
konieczności posiadania migawki przez urządzenie, gdyż przerzut ładunków z górnej
połowy matrycy do dolnej zajmuje około 1 milisekundy.
1.3.3.3 Transfer poprzez interlinię (interline-transfer CCD)
Tutaj kolumny są na przemian odsłonięte i zasłonięte. Taka konfiguracja
umożliwia bardzo szybkie przenoszenie ładunków z kolumny odsłoniętej do kolumny
zasłoniętej (czas takiej operacji jest rzędu mikrosekund). Zakryte kolumny tzw.
interlinie mogą być wtedy sczytywane nieco wolniej np. metodą skanowania
postępującego. Mankamentem tego układu jest to że część powierzchni rejestrującej
chipu jest zasłonięta. Jednak w chipach nowej generacji stosuje się układy soczewek,
które kierują wiązkę na odsłonięte piksele.
19
1.3.3.4 Odczyt w czasie ekspozycji
Aby można było płynnie i szybko rejestrować większy obszar nieba niż pole
widzenia kamery, stosuje się skanowanie w czasie ekspozycji. Na skutek ruchu
teleskopu względem nieba obrazy gwiazd na matrycy są przesuwane z taką sama
prędkością, z jaką odbywa się transport ładunku. Czas naświetlania gwiazdy jest równy
czasowi przejścia jej obrazu wzdłuż matrycy, a rozmiary pasa na niebie objętego
fotografią zależą od czasu trwania całego skanowania.
1.3.4 Wydajność kwantowa
Jest to wielkość informująca nas o tym jak dużo elektronów jest wybijane
przez padające na piksel fotony i wyraża się wzorem:
CCD posiadające silikonowe podłoże osiąga maksimum (70-90%) wydajności
kwantowej w przedziale długości fali od 500 do 950 nm.
1.3.5 Liniowość
Matryca jest liniowa, gdy liczba zliczeń z poszczególnych pikseli jest wprost
proporcjonalna do czasu ekspozycji lub jest wprost proporcjonalna do natężenia wiązki
światła padającego na nasz detektor. Prościej mówiąc jeżeli matryca CCD jest liniowa,
a natężenie źródła światła jest stałe, to na obrazku uzyskanym wskutek ekspozycji
czterosekundowej można się spodziewać, że średnia liczba zliczeń z wszystkich pikseli
będzie dwukrotnie wyższa, niż na obrazku uzyskanym wskutek ekspozycji
dwusekundowej. Podobna sytuacja zaistnieje gdy czas ekspozycji będzie ten sam,
natomiast natężenie światła będzie się zmieniać.
Zgłębiając problem dowiadujemy się że CCD jest liniowe dopóki ładunek
zebrany na pikselu jest za mały aby przeskoczyć barierę potencjału izolującą każdy
piksel od jego sąsiadów. W praktyce większość detektorów CCD jest liniowa gdy
20
w każdym pikselu pozostaje nie więcej ładunku niż dwie trzecie pojemności studni
potencjału.
1.3.6 Zdolność rozdzielcza
Piksele są uszeregowane w kolumny i linie tak,
że matryca przypomina szachownicę o bardzo dużej
ilości pól (obrazek obok). O zdolności rozdzielczej
matrycy decyduje liczba pikseli wchodzących w jej
skład, oraz rozmiar pojedynczego piksela. Natomiast
sama fizyczna wielkość chipu ma, wraz z ogniskową
układu optycznego zestawionego z kamerą, wpływ na
wymiary pola widzenia aparatury. Możemy je obliczyć
przy pomocy poniższego wzoru:
CCD 57,3
d CCD
stopnie 3439 d CCD sekundy
F
F
(1.3)
Gdzie dCCD to rozmiar chipu, a F to ogniskowa układu optycznego dołączonego do
detektora.
Liczba pikseli głównie decyduje o wymiarach obrazka. Natomiast rozmiary
pojedynczego piksela determinują wielkość kątową najmniejszych widocznych jego
detali. Aby robić zdjęcia w dobrej rozdzielczości, to piksele powinny być na tyle małe,
aby najmniejsze szczegóły obrazka zajmowały dwa lub więcej pikseli leżących tuż obok
siebie. Oczywiście nie zawsze uda się uzyskać zadowalającą rozdzielczość, a czasem
jest to nawet niemożliwe. Po pierwsze ograniczają nas po prostu parametry chipu jakim
dysponujemy, a poza tym jeszcze trzeba wziąć pod uwagę to, jakiego układu
optycznego używamy. Aby obliczyć kątowy rozmiar pola widzenia jednego piksela
posługujemy się poniższym wzorem:
piksel 206265
21
d piksel
F
(1.4)
w którym dpiksel to wielkość fizyczna piksela, a F to ogniskowa układu optycznego
skonfigurowanego z detektorem. Otrzymany wynik podawany jest w sekundach łuku.
1.3.7 Niepożądane zjawiska związane z budowa i zasadą działania
CCD i metody ich redukcji
Pracy CCD towarzyszą pewne zjawiska i efekty, które z punktu widzenia
zastosowania go w astronomii są niepożądane i powodują utrudnienia w pracy.
Zaliczają się do nich różnego rodzaju szumy takie jak np. prąd ciemny, z którym
związane jest m.in. zjawisko gorącego rogu. Oprócz tego użytkownik boryka się ze
zwykłym problemem zabrudzenia detektora. Można się przed tym wszystkim bronić.
Dzieje się to na drodze procesu zwanego redukcją danych.
Redukcja danych polega na wykonaniu ciemnej klatki (darkframe), i Biasu
(bias frame), które odejmujemy, oraz płaskiego pola (flatfield), który dzielimy przez
obrazki zawierające obserwacje.
1.3.7.1 Prąd ciemny, ciemna klatka (darkframe)
Jest to rodzaj szumu, którego w żaden sposób nie da się uniknąć. Jego
przyczyną jest losowy ruch elektronów w obrębie detektora. Współczynnik prądu
ciemnego zależy od temperatury, natomiast nie zależy od padającego na matrycę światła
co oznacza, że występuje on zarówno gdy detektor znajduje się w całkowitej ciemności,
jak i w sytuacji kiedy pada na niego światło. Można go obliczyć dla temperatury T za
pomocą poniższego wzoru:
R R0 2
T T0
T
(1.5)
gdzie R0 jest współczynnikiem prądu ciemnego dla temperatury T0. T jest to stała dla
danego detektora ilość stopni, dla której następuje podwojenie prądu ciemnego. Jak
widać zmienia się on w sposób wykładniczy wraz ze zmianami temperatury. Oznacza
to, że wraz ze wzrostem temperatury podwaja się, lub zmniejsza o połowę, gdy
temperatura spada. Ilość elektronów S (prądu ciemnego) jaka powstaje na matrycy
22
zależy od wyżej omówionego współczynnika i od czasu ekspozycji t. Zależność tę
przedstawia wzór 1.6
S Rt
(1.6)
Szum termiczny można zredukować ochładzając detektor. Jednak nie można go
całkowicie wyeliminować. Inna metoda polega na rejestracji tzw. ciemnej klatki
(darkframe). Rejestruje się kilka ciemnych klatek, a następnie tworzy jeden uśredniony
darkframe i odejmuje go od obrazków na których znajduje się badany obiekt. Należy
przy tym pamiętać, że czas ekspozycji ciemnej klatki, musi być taki sam jak czas
ekspozycji obrazków wykonywanych w trakcie obserwacji.
Rys. 13. Ciemna klatka z widocznym na niej ciemnym prądem (zielone punkty)
1.3.7.2 Gorący róg
Z tym problemem spotykamy się we wszystkich urządzeniach CCD.
Oczywiście w zależności od klasy detektora jest on bardziej lub mniej uciążliwy.
Gorącym rogiem nazywamy ten róg matrycy w którym znajdują się urządzenia
zbierające z niej sygnał i go przetwarzające. Ponieważ są to urządzenia elektroniczne, to
podczas wykonywania pracy nagrzewają się. W efekcie w ich otoczeniu temperatura
jest nieco wyższa niż w pozostałych miejscach matrycy, powoduje, że w tym rogu
rejestrujemy silniejszy prąd ciemny. Redukowany jest on również za pomocą odjęcia
ciemnej klatki. W profesjonalnych kamerach przetwornik analogowo-cyfrowy jest
wyłączony w czasie ekspozycji, co osłabia stopień zjawiska praktycznie do zera.
23
Rys. 14. Ciemna klatka z widocznym
gorącym rogiem
1.3.7.3 Blooming
Zjawisko występuje w sytuacji gdy podczas ekspozycji matryca zostanie
prześwietlona. W wyniku prześwietlenia następuje wysycenie studni potencjału, tzn.
wypełnia się ona po brzegi elektronami. Każde kolejne elektrony wybijane przez
padające na matrycę fotony nie będą się mieścić w studni i zaczną się wylewać do
sąsiednich pikseli (rysunek poniżej).
Rys. 15. Wylewanie się ładunku do sąsiednich pikseli (blooming)
24
Rys. 16. Obrazek z widocznym w górnej części efektem bloomingu9
Jak widać wynikiem bloomingu jest nie tylko zafałszowanie sygnału który
zawiera obraz, ale również po prostu zniekształcenie zdjęcia. Najprostszą metodą
redukcji bloomingu jest dobranie takiego czasu ekspozycji, aby nie prześwietlić
detektora. Nie zawsze jest to jednak możliwe, zwłaszcza gdy interesujący nas obiekt
leży obok jaśniejszego. Wtedy czas ekspozycji przy którym nie dojdzie do
prześwietlenia jasnego obiektu, jest zbyt krótki aby zarejestrować na obrazku nasz
obiekt.
Producenci detektorów CCD zaopatrują swoje produkty (oczywiście nie
wszystkie) w system anty-bloomingowy. Realizuje się go poprzez umieszczenie między
pikselami uziemionych stref. Elektrony wylewające się ze studni zostają uziemione
w tych strefach i nie docierają do sąsiednich pikseli (rysunek 17).
Rys. 17. Sposób realizacji anty-bloomingu
9
Zapożyczone ze strony internetowej http://www.ccd.com/ccd102.html
25
Uziemiona strefa nazywana jest bramką anty-bloomingową (ABG – AntiBlooming
Gate). Niestety zajmuje ona około 30% powierzchni czynnej piksela, co w praktyce
oznacza spore osłabienie czułości detektora. Na dodatek obecność ABG powoduje, że
przerwy między pikselami są większe, a to z kolei osłabia efektywną rozdzielczość
chipu.
1.3.7.4 Readout Noise i Bias Frame
CCD jest detektorem elektronicznym. Z samego tego faktu wynika istnienie
wielu tzw. elektronicznych szumów. Pod pojęciem readout noise rozumiemy
zredukowany do minimum elektroniczny szum generowany przez detektor. Do szumów
elektronicznych zaliczamy wcześniej omówiony prąd ciemny, oraz szumy związane
z transferem ładunku w matrycy (transfer noise), resetowaniem po każdym cyklu
urządzeń zbierających ładunek (reset noise) i fluktuacjami wynikającymi z szybkości
działania urządzenia (fast interface state noise). Do tego zestawu dochodzi jeszcze tzw.
MOSFET (metal-oxide-semiconductor field effect transistor), związany z pracą
urządzeń zbierających ładunki z matrycy i przekazujących je dalej. Z punktu widzenia
użytkownika mamy niewielkie możliwości redukowania wyżej wymienionych szumów
(za wyjątkiem prądu ciemnego), gdyż zależą one od własności i klasy detektora jakim
dysponujemy, stąd tylko wspominam o istnieniu tego typu problemu. Są to generalnie
zagadnienia natury technologicznej, zatem pozostawiam ten problem producentom
urządzeń CCD, a zainteresowanych tematem, odsyłam do literatury zamieszczonej na
końcu niniejszej pracy, oraz internetu.
Narzędziem przy pomocy którego możemy redukować elektroniczne szumy,
bez ingerencji w wnętrze chipu, jest wykonanie tzw. Biasu. Bias to obrazek o zerowym
czasie ekspozycji, zawierający szumy generowane przez samą kamerę. W idealnej
sytuacji taka klatka nie powinna zawierać żadnego sygnału, niestety praktyka pokazuje,
że tak nie jest. Bias jest w procesie redukcji odejmowany tak jak ciemna klatka od
obrazka na którym znajdują się właściwe obserwacje.
26
Rys. 18. Bias10
1.3.7.5 Różnica w czułości poszczególnych pikseli, Flatfield
Ponieważ każdy piksel matrycy jest w rzeczywistości odrębnym detektorem, to
mogą wystąpić różnice w czułości poszczególnych pikseli. Teoretycznie piksele
powinny być identyczne, lecz w rzeczywistości kolejne napylane warstwy mogą mieć
różne rozmiary (grubość, szerokość ścieżek itp.), a napylane na kolejne warstwy
substancje
mogą
zawierać
różne
zanieczyszczenia.
Podobnie
może
być
z mikrosoczewkami, które znajdują się w niektórych detektorach. Najbardziej
oczywistym dowodem na istnienie tego faktu jest obecność gorących i martwych pikseli
na matrycy, które w zupełnie inny sposób reagują na padające na nie światło niż
pozostałe piksele, które teoretycznie mają te samą budowę.
Kolejnym problemem jest fakt, iż nierzadko chip jest nierównomiernie
oświetlony. W wyniku tego piksele leżące w różnych miejscach matrycy mogą być
różnie oświetlone. Powodów jest kilka. Pierwszym z nich jest obecność na chipie,
obiektywach, filtrach itp. różnego rodzaju zabrudzeń i kurzu. Drugi kłopot to brak
prostopadłości powierzchni detektora do osi optycznej układu optycznego. Trzeci
powód to niedoskonałości w budowie filtrów takie jak niejednorodności w klejeniu
warstw i niedokładności w wykonaniu płytek płaskorównoległych okienek i warstw. Do
tego dochodzi na koniec zjawisko winietowania na różnych elementach teleskopu
i kamery.
Zapożyczone ze strony internetowej:
http://www.science.widener.edu/~augensen/research/Sproul/bias.jpg
10
27
Aby usunąć ewentualne zafałszowania obrazu spowodowane różnicami
czułości poszczególnych pikseli oraz oświetlenia matrycy, wykonuje się tzw. flatfield
(płaskie pole), czyli zdjęcie zarejestrowane w chwili gdy układ optyczny skierowany
jest na równomiernie oświetloną powierzchnię. Należy pamiętać w tym miejscu o tym,
że zarejestrowany obraz zawiera, oprócz interesującego sygnału, prąd ciemny i readout
noise. W dalszym procesie redukcji należy odjąć ten szum od flatfield’u. Aby to zrobić
należy zarejestrować kilka darkframe’ów o tym samym czasie ekspozycji co flatfield,
a następnie odjąć je w programie redukcyjnym.
Rys. 19. Flatfield z widocznymi zanieczyszczeniami chipu11
1.3.7.6 Gorące i martwe piksele
Są one wynikiem niedoskonałości matrycy CCD. Na matrycy znajduje się od
kilkuset tysięcy do kilku milionów pikseli, trudno zatem spodziewać się, że każdy
będzie miał identyczne parametry. Wśród nich znajdują się takie, które generują na
sygnał w sytuacji gdy nie pada na nie światło i są jaśniejsze od otoczenia, nazywamy je
gorącymi pikselami, oraz takie które na światło są praktycznie nieczułe i nawet przy
silnej wiązce światła nie będziemy od nich odbierać żadnego sygnału. Te noszą z kolei
nazwę martwych pikseli.
11
Zapożyczone ze strony internetowej: http://www.ursa.fi/sirius/kuvat/ccd/flatti.jpg
28
Rys. 20. Ciemna klatka z widocznym gorącym pikselem (patrz czerwone kółko)
Gorące i martwe piksele są usuwane z obrazka za pomocą ciemnej klatki.
Generalnie zjawisko jest niegroźne jeśli tego typu pikseli jest niewiele, ponieważ
wówczas istnieje niewielkie prawdopodobieństwo, że obserwowany obiekt znajdzie się
na obrazku w miejscu gdzie one występują.
1.4 Fotometria CCD
Kamerę internetową zbudowana na bazie CCD możemy wykorzystać
w procesie fotometrii, który praktycznie nie różni się od tego za pomocą którego
naukowcy prowadzą swoje badania gwiazd zmiennych. Aby wyznaczać minima
najpierw należy uzyskać krzywą zmian jasności tzn. przeprowadzić fotometrię, która
poprzedzona jest redukcją otrzymanych obrazków. Istnieje kilka metod fotometrii.
1.4.1 Metoda aperturowa
Stosuje sieją w fotometrii gwiazd które nie
leżą w zbyt gęstych polach. Najczęściej gwiazda
zajmuje na zdjęciu kilka pikseli (rysunek 21).
W metodzie aperturowej ustala się okrąg (tzw.
aperturę), zadając wielkość jego promienia, którego
środek staramy się umieścić precyzyjnie na środku
29
obrazu gwiazdy. Następnie sumuje się wszystkie zliczenia, pomniejszone o poziom tła,
z pikseli znajdujących się w obrębie koła. Należy dobrać odpowiedni do seeingu
rozmiar apertury. Powinna ona być taka, aby obraz gwiazdy znajdował się w środku,
lecz na tyle mała, aby nie obejmowała obrazów innych gwiazd. Jasność instrumentalna
gwiazdy jest zdefiniowana wzorem (1.7)
mi 2,5 log N ap
(1.7)
a formalny błąd pomiaru wzorem (1.8)
mi
1,0857362
N ap
(1.8)
gdzie Nap to całkowita ilość zliczeń pochodzących od gwiazdy, po odjęciu zliczeń tła.
Piksele graniczne, które nie całe mieszczą się w ustalonym przez nas kole też
są zliczane, ale nie w całości (tylko określona część, równa stosunkowi powierzchni
objętej przez koło do całkowitej powierzchni piksela).
Po zebraniu wszystkich zliczeń z zarejestrowanych zdjęć, otrzymujemy krzywą
zmian jasności. Może ona służyć do dalszych badań; np. do wyznaczania minimów,
modelowania itp.
1.4.2 Metoda profilowa
Metoda
polega
na
wyznaczeniu
średniego rozkładu jasności obrazu gwiazdy
na chipie, który może wyglądać podobnie jak
to przedstawia rysunek 22.
Rys. 22. Rozkład jasności obrazu
gwiazdy na chipie12
12
Rysunek zapożyczony ze strony internetowej: www.dtc.army.mil/hpcw/1999/licklide/imege05.gif
30
Przekrój obrazu gwiazdy na zdjęciu przedstawia poniższy rysunek 23.
Rys. 23. Przekrój obrazu gwiazdy (I – liczba zliczeń, x – numer piksela w rzędzie)
Do profilu gwiazdy można dopasować dwuwymiarową funkcję Gaussa. Dwa
najważniejsze parametry które charakteryzują tę krzywą to jej wysokość i szerokość
połówkowa, czyli szerokość w połowie jej wysokości. Taka funkcję wpisaną w profil
gwiazdy nazywamy funkcją PSF (Point Spread Function). Zakłada się, że stosunek
wysokości do szerokości połówkowej jest stała po całym chipie. PSF wyznaczamy dla
każdego obrazka na podstawie odseparowanej gwiazdy, a następnie dopasowujemy go
obrazów innych gwiazd na tej samej klatce, skalując go na podstawie maksymalnego
poziomu zliczeń. Dysponując dobrze wyznaczoną funkcja PSF można wyznaczyć
jasność gwiazd położonych tak blisko siebie, że ich profile zachodzą na siebie. O
zdolności rozdzielczej metody decyduje kryterium Rayleigha.
Metoda ta ma jednak swoje słabe strony. Przede wszystkim założenie stałości
PSF po całym chipie, jest dużym uproszczeniem, ponieważ w rzeczywistości tak nie
jest. Oprócz tego metoda nie jest „uodporniona” na niedoskonałości układu optycznego,
lub na brak idealnego zogniskowania naszego
obiektu. Powoduje to zniekształcenia profili,
polegające m.in. na pojawieniu się na szczycie
funkcji osłabienia (rysunek 24). Rzeczywisty
profil może wtedy odbiegać od profilu Gaussa.
W wyniku tego zjawiska mamy źle wyznaczoną
funkcję PSF. Do rzeczywistych profili gwiazd
program dopasuje zły profil teoretyczny, co może zupełnie zafałszować otrzymane
wyniki. Do wyżej wspomnianych wad optyki możemy zaliczyć: brak prostopadłego
ustawienia detektora do osi optycznej, niedoskonałości powierzchni szkiełka
31
okrywającego CCD (chodzi głównie o jego grubość, która może być różna w różnych
miejscach chipu), czy też fakt, że filtry nie są ustawione idealnie równolegle do
płaszczyzny matrycy. Wszystkie te niedoskonałości w mniejszym lub większym stopniu
występują zarówno w profesjonalnych CCD jak i amatorskich kamerach zbudowanych
na bazie detektora CCD.
Aby metoda profilowa była w miarę dokładna i obarczona niewielkim błędem
musimy
dysponować
CCD
o odpowiedniej rozdzielczości.
Chodzi głównie o to, że im
większa
jest
rozdzielczość
zdjęć, to można z większą
dokładnością
funkcję
Gaussa.
rysunkach
widać
dopasować
ten
obok
Na
(rys.
sam
25)
obszar
sfotografowany detektorami w
różnej rozdzielczości. Obrazki
numer 1 i 2 nadają się do
fotometrii profilowej, jednak
Rys. 25. Różne rozmiary pikseli
oznaczone numerami 3 i 4 nie.
Oznacza to, że zwykłą kamerą internetową fotometrii profilowej nie można przeprowadzić,
ponieważ obraz gwiazdy zajmuje zaledwie 1-4 piksela.
1.4.2.1. Kryterium Rayleigha13
Kryterium to mówi, że dwa prążki
główne (w tym wypadku dwa profile)
można rozróżnić, gdy odległość szczytów
jest większa od około 1.22 szerokości
połówkowej (patrz rys.26).
Rys. 26. Kryterium Rayleigha
13
paragraf opracowany na podstawie strony internetowej:
http://www.phys.uni.torun.pl/~andywojt/wyklady/wyklad13/wyklad13.html
32
1.4.3 Metoda odejmowania obrazków
Ta metoda stosowana jest do bardzo gęstych pól. Umożliwia nam ona
wykonywanie fotometrii gwiazd wchodzących w skład gromad kulistych. Nazwa
metody w sposób dosłowny oddaje to na czym ta metoda polega. Od pierwszego
obrazka tzw. referencyjnego odejmuje się kolejne zdjęcia. Gdyby gwiazdy znajdujące
się na obrazku nie zmieniały jasności, to po odjęciu kolejnego obrazka od obrazka
referencyjnego na tzw. obrazku różnicowym, uzyskamy średnią liczbę zliczeń równą
zero. Oczywiście pomijając sporadyczne zliczenia pojawiające się w wyniku fluktuacji
elektronów w detektorze. Jednak gdy na obrazku jest gwiazda zmienna to w miejscu
gdzie się ona znajduje, na obrazku różnicowym pojawi się niezerowa liczba zliczeń.
Będzie się ona zmieniać z czasem na kolejnych obrazkach, w miarę zmian jasności
rzeczywistej gwiazdy. Wykres zależności czasu od liczby zliczeń na kolejnych
następujących po sobie obrazkach będzie krzywą zmian jasności gwiazdy.
Metoda również posiada kilka słabych stron. Przede wszystkim jest bardzo
czuła na zmiany seeingu, poziomu tła, oraz zmian ogniska (na skutek rozszerzania lub
kurczenia termicznego teleskopu). Obserwator musi zwracać zatem uwagę na warunki
pogodowe, które zmieniają się w przeciągu nocy, zwłaszcza gdy obserwacje prowadzi
się przez długi okres czasu. Zrobiony obrazek referencyjny w godzinach wieczornych,
raczej nie nadaje się do porównywania ze zdjęciami zrobionymi podczas obserwacji w
środku nocy lub nad ranem. Należy pamiętać zatem, że obrazkiem referencyjnym
powinno być najlepsze zdjęcie zarejestrowane w czasie obserwacji, gdyż w czasie
redukcji jest jego jakość w odpowiedni sposób pogarszana, aby się dostosować od
aktualnego seeingu i poziomu tła.
Poza tym
prowadzenie kamerki lub teleskopu za gwiazdami musi być
najwyższej jakości i precyzji. Każde nawet najmniejsze przesunięcia gwiazd w polu
widzenia powodują zafałszowanie wyników. W miejscu gdzie na obrazku
referencyjnym (1) była gwiazda teraz na obrazku zrobionym w trakcie obserwacji jej
nie ma (2). Zatem mamy na obrazku różnicowym (3) w miejscu gwiazdy obecnej na
obrazku referencyjnym liczbę zliczeń równą liczbie zliczeń tej gwiazdy jaka była na
tymże obrazku, ponieważ odejmowaliśmy od niej puste pole gdzie gwiazdy nie było.
Natomiast w miejscu gdzie gwiazdy nie było, teraz jest. Tak więc od pustego pola
33
odejmą się zliczenia gwiazdy i otrzymamy niezerowy wynik. Na obrazku różnicowym
są teraz dwie gwiazdy a nie jedna, ponieważ niezerowa liczba zliczeń występuje
w dwóch miejscach na obrazku różnicowym (patrz poniżej po prawej stronie).
Bez przesunięcia
Z przesunięciem
Rys. 27. N,M – liczba zliczeń. 1 – obrazek referencyjny, 2 – obrazek
wykonany w trakcie obserwacji, 3 – obrazek różnicowy
Ten efekt nie jest jednak tak bardzo groźny, gdyż przed odejmowaniem obrazy
są rozpoznawane i odpowiednio nasuwane na siebie. Jak widać metoda wymaga bardzo
precyzyjnej redukcji i stopień jej komplikacji wyklucza zastosowania amatorskie.
34
1.4.4 Pomiary absolutne i różnicowe
Istnieją dwa sposoby prowadzenia pomiarów fotometrycznych obserwowanej
gwiazdy lub obserwowanych gwiazd (można jednorazowo wykonać pomiar zmian
jasności wszystkich gwiazd zmiennych znajdujących się w polu widzenia naszej
kamery). Są to pomiary absolutne i różnicowe.
Pomiary
absolutne
wykonuje
się
w
celu
wyznaczenia
standardów
fotometrycznych i ich wynikiem jest obserwowana jasność gwiazdy, na podstawie
której możemy wyznaczyć jasność pozaatmosferyczną (patrz wzór 1.9).
m pozaatmosferyczna mobserwowana k x(z )
(1.9)
k jest to współczynnik ekstynkcji atmosferycznej, a x to masa atmosferyczna, która
zależy od odległości zenitalnej z. Współczynnik ekstynkcji opisuje przeźroczystość
atmosfery o jednostkowej masie. Wyraża się go w wielkościach gwiazdowych. Wartość
masy atmosferycznej wynosi jeden gdy gwiazda znajduje się w zenicie i rośnie, gdy jej
wysokość nad horyzontem się obniża (rośnie jej odległość zenitalna z). Możemy ją
wyliczyć za pomocą wielomianu:
x sec( z ) A[sec( z ) 1] B[sec( z ) 1]2 C[sec( z ) 1]3
(1.10)
gdzie: A = 0,0018167; B = 0,002875; C = 0,0008083;
Masa atmosferyczna nie zależy od warunków atmosferycznych i miejsca obserwacji.
Pomiary absolutne wymagają precyzyjnego skalibrowania detektora przy
pomocy wzorców stałych fizycznych. Zatem robienie takich pomiarów w astronomii
amatorskiej jest wykluczone.
Pomiar różnicowy polega na pomiarze różnicy jasności gwiazdy obserwowanej
i gwiazdy porównania. Zakłada się, że liczba zliczeń na CCD jest proporcjonalna do
jasności gwiazdy. Przyjmując współczynnik a który uwzględnia stan atmosfery,
możemy zapisać:
I 1 ~ z1 I 1 a z1
I 2 ~ z2 I 2 a z2
35
(1.11)
gdzie I to natężenie światła pochodzącego od gwiazdy, a zi to liczba zliczeń. Stała a jest
taka sama dla gwiazdy obserwowanej i gwiazdy porównania, ponieważ na zdjęciu są
one uchwycone w tej samej chwili czasu. Stan atmosfery był zatem identyczny,
zakładając, że w tym momencie nie było chmur w polu widzenia. Różnicę jasności
obliczamy z następującego wzoru:
m m2 m1 2,5 log
I1
z
2,5 log 1
I2
z2
(1.12)
Większość programów dostępnych na rynku dla amatorów (tych zarówno
darmowych jak i komercyjnych) stosuje kombinację: metoda aperturowa i pomiary
różnicowe.
1.4.5 Krzywa zmian jasności i minima
Uzyskana krzywa zmian jasności jest wykreślona w funkcji czasu. Na osi
odciętych przedstawiono czas podany w dniach juliańskich (JD) lub fazę orbitalną
gwiazdy, a na osi rzędnych jasność gwiazdy (pomiar absolutny) lub różnicę jasności
gwiazdy zmiennej i gwiazdy porównania, albo unormowany strumień energii i jej
gwiazdy porównania (pomiar różnicowy) wyrażona w wielkościach gwiazdowych. Na
krzywej zmian jasności gwiazd zaćmieniowych można zaobserwować minima związane
z zakrywaniem się składników układu. Minimum występuje w chwili gdy jeden
składnik przesłania drugi. Głębsze osłabienie występuje gdy ciemniejsza gwiazda
przesłania swojego jaśniejszego towarzysza, płytsze gdy jest odwrotnie. Tak jest
oczywiście gdy składniki gwiazdy podwójnej różnią się od siebie jasnością.
W przypadku porównywalnej jasności składników minima mają podobną głębokość.
Minima na krzywej zmian jasności mogą posiadać tzw. płaskie dno, co oznacza, że
mamy do czynienia z zaćmieniem całkowitym, a w chwili gdy ono występuje większy
składnik przechodzi przed mniejszym lub mniejszy przechodzi przez tarczę większego.
Czas trwania płaskiego dna oznaczamy literą d. Dysponując krzywą zmian jasności
i wynikami spektroskopii potrafimy skonstruować matematyczny model budowy
gwiazdy, czyli określić jakie składniki wchodzą w skład układu podwójnego, jaką mają
jasność, masę itp.
36
Rys. 28. Przykładowa krzywa zmian jasności14
1.4.6 Wielkość gwiazdowa
Jest to wielkość służąca astronomom do opisu jasności gwiazdy. Magnitudo to
nazwa łacińska, w Polsce zamiennie używa się pojęcia wielkości gwiazdowej, choć nie
ma ono z fizycznymi rozmiarami gwiazdy nic wspólnego. Skala wielkości
gwiazdowych opiera się na klasyfikacji Ptolemeusza. Podzielił on widoczne na niebie
gwiazdy na 6 grup, przy czym do pierwszej zaliczył gwiazdy najjaśniejsze, a do szóstej
te najsłabsze. W tej skali różnica wielkości jednego magnitudo to stosunek natężeń
oświetlenia równy około 2,5. Skala jasności ma charakter logarytmiczny i została ona
rozciągnięta na bardzo jasne obiekty jak na przykład Słońce, oraz na te słabe, które nie
są widoczne gołym okiem.
1.4.7 Dni juliańskie (JD – Julian Day)
Jest to liczba dni jaka upłynęła od 1 stycznia 4713 roku p.n.e. Podaje się je
w formie liczby całkowitej i części dziesiętnych (najczęściej 5 miejsc po przecinku).
Dzień juliański zaczyna się o godzinie 12.00 UT i to głównie dlatego astronomowie
używają właśnie tej rachuby dni, gdyż w trakcie obserwacji nie następuje zmiana daty.
Algorytm przeliczania dni juliańskich na dni kalendarza gregoriańskiego i odwrotnie
znajduje się w załączniku nr 1.
14
Rysunek zapożyczony ze strony internetowej: http://caleb.eastern.edu/binary_type_definitions.php
37
1.4.8 Poprawka heliocentryczna i heliocentryczny dzień juliański
(HJD)
Pewna komplikacja wyznaczania momentów minimów wiąże się z obiegowym
ruchem Ziemi. Odległość obserwatora od gwiazdy może zmieniać się cyklicznie nawet
o dwie jednostki astronomiczne w skali pół roku. Wyznaczony moment minimum
gwiazdy w pozycji najbliższej, będzie się różnic od momentu wyznaczonego w pozycji
najdalszej. Dzieje się tak z powodu skończonej prędkości światła. W celu eliminacji
tego efektu momenty minimów przelicza się tak jakby obserwacje były prowadzone ze
środka masy układu słonecznego, który nie bierze udziału w żadnym ruchu obiegowym.
Podaje się je w tzw. heliocentrycznych dniach juliańskich (HJD). Poprawkę oblicza się
na podstawie wzoru 1.13.
HJD JD 0.0058 cos cos( L0 )
(1.13)
gdzie: L0 to długość ekliptyczna Słońca w chwili obserwacji, - długość ekliptyczna
gwiazdy, - szerokość ekliptyczna gwiazdy.
1.5 Gwiazdy zmienne
Do tego typu gwiazd zaliczamy te, które wykazują zmiany jasności nie
związane ze zjawiskami towarzyszącymi przejściu promienia świetlnego pochodzącego
od gwiazdy przez atmosferę naszej Ziemi. Nie zaliczymy do nich gwiazd, które
zmieniają swoją jasność na przestrzeni milionów lat, w skutek procesów ewolucyjnych
zachodzących w ich wnętrzu. Natomiast zaliczymy do tej grupy ciał niebieskich
gwiazdy zmieniające swoją jasność w okresach od ułamka sekundy do kilkudziesięciu,
może nawet kilkuset lat. W tej chwili jest znane kilkadziesiąt tysięcy gwiazd
zmiennych, nie tylko tych w naszej galaktyce, ale i poza nią. W katalogu GCVS
(General Catalog of Variable Stars) zebranych jest około 40 tysięcy obiektów tego typu.
Zmiany jasności mogą być niewielkie rzędu 0,1 mag. I tak jest w przypadku bardzo
dużej liczby gwiazd, ale zdarzają się wśród nich takie, których wahania jasności
osiągają liczbę kilku a nawet kilkunastu mag. (np. gwiazdy supernowe). Gwiazdy
zmienne oprócz tradycyjnych nazw, posiadają też nazwy składające się z jednej lub
dwóch dużych liter łacińskich plus nazwy gwiazdozbioru w którym się znajdują. Te
38
oznaczenia uszeregowane są w następującej kolejności: R, S, T, U, V, W, X, Y, Z,
RR...RZ, ST...SZ, aż do ZZ i następnie AA...AZ, BB...BZ,...,QQ...QZ. Kombinacji
starcza na 334 gwiazdy. Jeżeli w danym gwiazdozbiorze odkryto więcej niż 334
gwiazdy, to kolejne nazywa się podając literkę V, za nią począwszy od 335 następują po
sobie kolejno liczby, a za liczbą znajduje się nazwa gwiazdozbioru, np. V348 Aql .
Gwiazdy zmienne dzielą się na:
zmienne z przyczyn geometrycznych
zmienne z przyczyn fizycznych
1.5.1 Gwiazdy zmienne z przyczyn fizycznych
Do tego typu gwiazd zaliczamy te, których zmiany jasności są spowodowane
zjawiskami zachodzącymi w ich wnętrzu. Do tych gwiazd zaliczamy gwiazdy pulsujące
i gwiazdy wybuchowe.
1.5.1.1 Gwiazdy pulsujące
Zmiany jasności w tych gwiazdach są spowodowane zmianami promienia
i temperatury efektywnej. Krzywa zmian jasności jest w ich przypadku najczęściej
niesymetryczna. Dzielimy je ze względu na okres zmienności, amplitudę, kształt
krzywych blasku, prędkości radialne i położenia na diagramie H-R. W wyniku tej
klasyfikacji wyróżniamy 7 grup15:
Mirydy (M)
Czerwone olbrzymy i nadolbrzymy typu widmowego M, C, S. Charakteryzują
się dużymi amplitudami (ponad 2,5 mag), stąd są bardzo popularne wśród
miłośników astronomii. Są to zmienne długookresowe (80-1000 dni).
Zmienne półregularne (SR) i nieregularne (L)
Czerwone olbrzymy i nadolbrzymy typów widmowych od F do M. W gwiazdach
SR okres i amplituda ulęgają zmianom w ciągu poszczególnych cykli. Gwiazdy
L nie wykazują żadnych regularności w zmianach blasku. Zarówno jedne jak
15
Podział zapożyczony z GCVS
39
i drugie są zmiennymi długookresowymi, aczkolwiek amplitudę maja mniejszą
od Miryd (nie przekracza ona 2,5 mag).
Zmienne typu RV Tauri (TV)
Olbrzymy i nadolbrzymy typu widmowego F – K. Okres zmian jest krótszy niż
w poprzednich typach, mieszczący się w przedziale 30 – 150 dni. Na krzywych
następuje najpierw głębsze, a po nim płytsze minimum, przy czym te płytsze
mogą stawać się głębszymi, a te głębsze płytszymi.
Cefeidy (DCEP)
Nadolbrzymy typów widmowych od F5 do K0. Ich jasności absolutne wahają się
w przedziałach od 2 do – 6 mag., a amplitudy od 0,1 do 2 mag. Okresy wynoszą
od kilku do kilkudziesięciu dni. Cefeidy spełniają zależność okres – jasność
absolutna, dzięki czemu są bardzo pomocne w wyznaczaniu odległości do
galaktyk.
Zmienne typu W Virginis (CW)
Bardzo podobne do cefeid, jednak w krzywych blasku wykazują one
występowanie wyraźnych garbów na gałęziach zarówno wznoszących jak
i opadających. Spełniają równanie okres – jasność absolutna, lecz ma ono nieco
inna postać od równania dla cefeid klasycznych.
Zmienne typu RR Lyrae (RR)
Często nazywane cefeidami krótkookresowymi. Są to olbrzymy typów
widmowych od A7 (w maksimum blasku) do F5 (w minimum). Są to gwiazdy
krótkookresowe o okresach rzędu ułamków doby. Amplitudy zmian jasności są
rzędu 0,5 mag.
Zmienne typu Scuti (DSCT)
Są to gwiazdy typu widmowego od A do F, znajdujące się w pasie niestabilności
na diagramie H-R. Ich okresy są krótsze niż 7-8 godzin, a amplitudy mniejsze od
0,3 mag.
1.5.1.2 Gwiazdy wybuchowe
Do tej grupy zaliczamy gwiazdy, których zmiany jasności są nieregularne
i wywoływane są przez procesy erupcji na powierzchni gwiazdy lub zjawiskami
podobnymi do wybuchów podczas których gwiazda odrzuca materię ze swojej
powierzchni. Cztery główne grupy jaki zaliczamy do tych gwiazd to:
40
gwiazdy zmienne typu T Tauri
Obserwujemy tutaj szybkie i nieregularne zmiany jasności o amplitudzie
dochodzącej do 3 mag. Pomiędzy okresami zmian jasność gwiazdy może
utrzymywać się na stałym poziomie. Widma tych gwiazd pozwalają nam
przypuszczać, że zachodzą w ich atmosferach gwałtowne procesy opadania
chłodnej materii na powierzchnie gwiazdy i odrzucania gorącego gazu z ich
powierzchni.
gwiazdy zmienne typu UV Ceti
Młode gwiazdy typu widmowego K, M. Obserwujemy tutaj krótkotrwałe
powaśnienia o amplitudach rzędu 1 – 6 mag. Pojaśnienie następuje w czasie
około 1 minuty, a następnie obserwujemy spadek przez kilkadziesiąt minut, aż
do osiągnięcia pierwotnej jasności sprzed rozbłysku. Takie rozbłyski pojawiają
się
nieregularnie
co
kilkadziesiąt
godzin
i
przypominają
rozbłyski
powierzchniowe występujące na Słońcu.
gwiazdy nowe
Nie są to obiekty nowe, jakby mogła na to wskazywać nazwa, tylko gwiazdy,
które początkowo były słabe, lecz nagle pojaśniały nawet o 7-13 mag.
Dotychczas zaobserwowano liczbę rzędu tysiąca gwiazd nowych. Krzywa
zmian jasności takiej gwiazdy zazwyczaj pnie się do góry przez około 2 lub 3
dni, a następnie obserwuje się jej spadek w przeciągu kilku miesięcy, a nawet
kilku lat. Przyczyna wybuchów gwiazd nowych są niestabilności zewnętrznych
ich warstw, co w końcowym rozrachunku prowadzi do ich odrzucenia
z powierzchni
gwiazdy.
To
właśnie
wtedy
obserwujemy
gwałtowne
pojaśnienie. Gwiazdy nowe często występują w układach podwójnych,
a gwałtowne efekty jakie w nich występują mają związek z przepływem
materii miedzy składnikami takiego układu.
gwiazdy supernowe
Jaśnieją one nawet o 20 wielkości gwiazdowych. Te pojaśnienia również są
efektem odrzutów materii (gwiazda może odrzucić nawet 90% swojej materii,
co powoduje zmiany w jej budowie) z powierzchni gwiazdy, jednakże tutaj
procesy te są o wiele bardziej gwałtowne i egzoenergetyczne. Ten rodzaj
gwiazd dzielimy na dwie grupy. Pierwsza grupa to supernowe I typu (SN I),
które cechuje dosyć szybki spadek blasku, a jasności absolutne dochodzą do
41
około –18,7 mag. Druga grupa to supernowe II typu (SN II). Tutaj spadek
blasku trwa nieco dłużej, również jasności absolutne są mniejsze niż
w przypadku gwiazd SN I, bo osiągają około –16,3 mag.
1.5.2 Gwiazdy zmienne z przyczyn geometrycznych16
Do tej grupy zaliczają się gwiazdy zmienne zaćmieniowe oraz elipsoidalne.
Gwiazdy
zaćmieniowe
to
szczególne
przypadki
układów
podwójnych
(lub
wielokrotnych) obiegających wspólny środek masy w ten sposób, że obserwator na
Ziemi patrzy na układ niemal w płaszczyźnie ruchu gwiazd. Następstwem tego jest
przesłanianie się wzajemne gwiazd wchodzących w skład układu. To zjawisko
przesłaniania obserwujemy jako zmianę łącznej jasności gwiazdy zaćmieniowej.
Charakterystyczne dla takich układów jest periodyczne występowanie spadków
jasności, które nazywamy minimami. Ponieważ odległość między składnikami układu
podwójnego jest bardzo mała w stosunku do odległości Ziemia – układ, to wszystkie
takie układy obserwowane są jako pojedynczy obiekt. Wśród gwiazd podwójnych
zaćmieniowych wyróżniamy następujące układy:
rozdzielone
półrozdzielone
kontaktowe
A oprócz tego istnieje podział gwiazd zmiennych ze względu na kształt krzywej zmian
jasności:
typu Algola
typu Lyrae
typu W Ursae Maioris
elipsoidalne
Podział i rysunki układów podwójnych zapożyczone ze strony internetowej:
http://caleb.eastern.edu/binary_type_definitions.php
16
42
1.5.2.1 Model Roche’a
Dzisiejsze badania, a przede wszystkim ich interpretacja opiera się na tym
modelu. Głównym jego założeniem jest istnienie powierzchni stałego potencjału
grawitacyjnego, na który składa się potencjał grawitacyjny składnika głównego,
składnika wtórnego, oraz siły odśrodkowej. Powierzchnia gwiazd pokrywa się
z powierzchnią ekwipotencjalną. Powierzchnie ekwipotencjalne otaczające gwiazdy
mają kształt kuli, jednak w miarę wzrostu odległości od gwiazdy staja się owalne, aż
w pewnym momencie się stykają. Taką powierzchnię ekwipotencjalną nazywamy
powierzchnią Roche’a. W modelu tym występują jeszcze powierzchnie otaczające
w sposób ciągły oba składniki. Wartość potencjału jest w nich mniejsza i nazywane są
powierzchniami „hantlowymi”. Bardziej na zewnątrz znajdują się tzw. zewnętrzne
powierzchnie Roche’a, których kształt staje się coraz bardziej kulisty wraz ze wzrostem
odległości od układu.
W modelu Roche’a występują tzw. punkty Lagrange’a. Są to punkty w których
potencjał przyjmuje graniczne wartości. W tych punktach na umieszczoną cząstkę
próbną nie działają żadne siły w układzie związanym ze składnikami, tzn. obracającym
się. Oznaczamy te punkty L1, L2, ... , L5, przy czym największe znaczenie maja punkty
L1i L2. L1 jest punktem przez który przepływa materia z jednej gwiazdy do drugiej,
natomiast L2 jest punktem przez który materia ucieka w przestrzeń.
1.5.2.2 Układ rozdzielony
Dwie gwiazdy zupełnie odseparowane znajdują się wewnątrz powierzchni
Roche’a. Ich kształt jest niemal kulisty. Schemat układu i kształt powierzchni
ekwipotencjalnych przedstawia rysunek 1.29.
Przykład: KP Aql.
43
L2
L1
Rys. 29. Schemat układu rozdzielonego
1.5.2.3 Układ półrozdzielony
W takich układach jedna z gwiazd całkowicie wypełnia powierzchnie Roche’a.
Jej kształt jest owalny. Natomiast jej towarzysz siedzi sobie spokojnie w powierzchni
Roche’a i jest mniejszy.
Przykład: AD Her.
Rys. 30. Układ półrozdzielony
1.5.2.4 Układ kontaktowy
Oba składniki wypełniają powierzchnie Roche’a. Stykaja się one ze sobą
w okolicach pierwszego punktu Lagrange’a, co umożliwia wymianę masy i energii
pomiędzy składnikami. Przykład: BX And.
44
Rys. 31. Schemat układu kontaktowego
1.5.2.5 Gwiazdy typu Algola
Oznaczany symbolem EA układ tego typu jest najbardziej rozpowszechniony
wśród typów gwiazd zaćmieniowych. Są to układy rozdzielone. Krzywa zmian jasności
charakteryzuje się dwoma minimami z których jedno jest głębokie i nazywa się
minimum pierwotnym, a drugie jest płytkie i nazywane jest minimum wtórnym. Poza
minimami jasność gwiazdy jest praktycznie stała. Okresy gwiazd tego typu wahają się
w przedziałach od doby do kilku tysięcy dni, jednak w przypadku zdecydowanej
większości jest to czas rzędu kilku, kilkunastu dni. Amplituda zmian jasności mieści się
w przedziale od kilku setnych do kilku wielkości gwiazdowych.
Rys. 32. Przykładowa krzywa zmian jasności gwiazdy typu EA
45
1.5.2.6 Gwiazdy typu Lyrae
Układ dwóch gwiazd znajdujących się blisko siebie. Są to układy
półrozdzielone. Gwiazdy nie maja kształtu kulistego i ich jasność powierzchniowa jest
nierównomierna. W związku z czym krzywa zmian jasności jest zmienia się w sposób
ciągły, także poza minimami. Oznaczone są symbolem EB.
Rys. 33. Przykładowa krzywa zmian jasności gwiazdy typu EB
1.5.2.9 Gwiazdy typu W Ursae Maioris
Są to układy kontaktowe. Krzywa zmian jasności posiada dwa minima
o prawie takiej samej głębokości. Są to układy krótkookresowe, gdzie okres waha się
w przedziale 5-24 godzin. Oznaczamy je symbolem EW.
Rys. 34. Przykładowa krzywa zmian jasności gwiazdy typu EW
46
1.5.2.10 Gwiazdy elipsoidalne
Do gwiazd zmiennych z przyczyn geometrycznych zaliczamy również gwiazdy
zmienne elipsoidalne, czyli te których orbity są nachylone w stosunku do obserwatora
znajdującego się na Ziemi pod takim kątem, że zaćmień już nie obserwujemy. Taki
układ zmienia swą jasność o dziesiąte lub setne części magnitudo i jest to spowodowane
tym, że w różnych fazach składniki układu są do nas zwrócone swoimi mniejszymi lub
większymi rzutami.
47
2. Obserwacje gwiazd krótkookresowych kamerą
internetową
Kamerka internetowa znana jest internautom już od kilku lat. Miłośnicy
astronomii wpadli jednak na pomysł, że przetwornik CCD który jest głównym
elementem budowy kamery, można wykorzystać do obserwacji gwiazd zmiennych
i wielu innych obserwacji astronomicznych. Kamerki takie pozwalają prowadzić
obserwacje takim samym detektorem jak profesjonalni naukowcy, może nie tej klasy
i jakości, niemniej jednak detektorem CCD. Proces redukcji jest taki sam jak
w przypadku obserwacji profesjonalną kamerą.
Kamerą internetową kupioną w sklepie nie można robić fotografii przy długich
czasach naświetlania. Aby kamerka mogła wykonywać długie ekspozycje należy
dokonać ingerencji w jej układ elektroniczny. Instrukcje opisujące sposoby modyfikacji
znajdują się w internecie. Samodzielna modyfikacja kamerki wiąże się jednak
z ryzykiem uszkodzenia sprzętu. Znacznie prostszym rozwiązaniem jest zakupienie już
przerobionej kamerki lub oddanie kupionej w sklepie do punktu w którym takie
przeróbki się dokonuje. Adresy tych miejsc znajdują się w załączniku numer 2.
Widocznym z zewnątrz znakiem, że mamy do czynienia ze zmodyfikowaną kamerą jest
obecność wejścia typu „jack” i przełącznika (tego drugiego może nie być). Aby móc
kamerkę połączyć z naszym komputerem powinien on posiadać wejście USB, oraz LPT
(kabel z zakończeniem typu „jack” wpięty do kamerki z drugiej strony wpinany jest do
komputera za pomocą portu LPT).
Rys. 35. Efekt modyfikacji kamerki (zdjęcie własne)
48
2.1 Zestaw obserwacyjny
Na samym początku istnieje konieczność zmontowania własnego zestawu
obserwacyjnego. Zastosowany zestaw składał się z następujących elementów:
Kamera PhilipsVesta Pro PCVC680K (detektor CCD)
Adapter do obiektywu (połączenie kamery z obiektywem)
Obiektyw Helios firmy Zenith 50mm f/2.8 lub inny obiektyw z gwintem M42
Celownica 3 20 (odszukiwanie obiektów na niebie)
Drewniane mocowanie (zamocowanie kamerki na montażu)
Montaż paralaktyczny z silnikiem (śledzenie obiektów na niebie)
Statyw
Zegar DCF (ręczna synchronizacja czasu)
Rys. 36. Zestaw obserwacyjny (zdjęcie własne)
Najdroższym elementem zestawu jest montaż ze statywem. Aby kupić
wysokiej klasy sprzęt trzeba mieć grubo ponad tysiąc złotych. Istnieje jednak
alternatywa. Ja sugerowałbym zakup teleskopu Firstscope 114 EQ firmy Celestron.
Koszt tego urządzenia to 800 złotych. W zamian otrzymujemy wysokiej klasy teleskop
49
zwierciadlany w systemie Newtona, oraz co ważniejsze lekki, mobilny montaż
paralaktyczny z możliwością zamocowania silnika prowadzącego teleskop. Koszt tego
silnika to 200 złotych17. W ten sposób stajemy się posiadaczami montażu
z prowadzeniem. Oprócz tego teleskop wyposażony jest w celownicę StarPointer™,
którą możemy wykorzystać. Pozostałe elementy można już zdobyć za przystępną cenę.
Niestety to nie wszystko. Kamera musi być w czasie pracy podpięta do
komputera, a ten z kolei wymaga zasilania prądem elektrycznym. Jeżeli nasze
obserwacje prowadzimy na działce z domkiem lub w ogrodzie naszego domu na wsi,
większego problemu nie ma. Kłopot pojawia się gdy mieszkamy w dużym mieście.
W tej sytuacji aby zrobić udane obserwacje konieczny jest wyjazd poza miasto. Dobrze
było by dysponować wtedy laptopem (nie musi być to mocny sprzęt – laptop klasy
Pentium II MMX™ 266 MHz w zupełności wystarczy) oraz przenośnym źródłem
zasilania (chyba że w laptopie posiadamy sprawną baterię a silnik prowadzenia zasilany
jest bateriami). Zakup takiego laptopa to wydatek rzędu 500-800 złotych, w zależności
od parametrów, natomiast generator prądu to kolejne 400 złotych. Podsumowując aby
stać się posiadaczem w pełni gotowego zestawu do obserwacji kamerką potrzebujemy
około dwa i pół tysiąca złotych, ale cześć zestawu (komputer, statyw) mogą posłużyć do
innych celów.
2.2 Kamera internetowa
To główne narzędzie pracy. Wybór kamerek na rynku jest ogromny ważne jest
jednak aby nabyć kamerę wyposażoną w CCD. Wspominam o tym, gdyż na rynku
dostępne są urządzenia wyposażone w nieco inny rodzaj detektora: CMOS. Na
dzisiejszym etapie rozwoju technologicznego CMOS nie znajduje szerokiego
zastosowania w astronomii amatorskiej.
Urządzeniem, którego użyto, jest wysokiej klasy (wśród tych powszechnie
dostępnych na rynku) kamera Philips Vesta Pro PCVC680K.
17
Dokładną ofertę można znaleźć na stronie www.deltaoptical.pl
50
Rys. 37. Kamera Philips Vesta Pro PCVC680K (zdjęcie własne)
Jej główne parametry umieszczone są w tabeli poniżej:
Przetwornik CCD:
SONY ICX098AK (Typ 1/4")
Rozmiar obrazka:
Przekątna: 4.5mm
3,87mm 2,82mm
Efektywna liczba pikseli:
659(H)18 494(V)19
~330000 pikseli
Całkowita liczba pikseli:
692(H) 504(V)
~350000 pikseli
Rozmiar piksela:
5.6µm(H) 5.6µm(V)
Rozmiar chipu:
4.60mm(H) 3.97mm(V)
Kamera jest zmodyfikowana i przystosowana do długich czasów ekspozycji, zatem
gotowa jest do pracy. Standartowo wyposażona jest w mały obiektyw (widoczny na
zdjęciu) o polu widzenia 43 33 stopnie, ale dla potrzeb fotometrii lepiej zastosować
obiektyw o większej średnicy i ogniskowej. Najpopularniejszą wśród miłośników
konfiguracją jest połączenie kamerki z obiektywem posiadającym gwint M42 za
pomocą łatwo dostępnej przejściówki. Najczęściej jest to obiektyw Helios firmy Zenith
50mm f/2.8 lub inne podobne. Pole widzenia kamerki wynosi 3.8 2.8 stopni
18
19
H (z ang. Horizontal) ozn. w poziomie
V (z ang. Vertical) ozn. w pionie
51
i zdeterminowane jest wielkością chipu, oraz kształtem przejściówki. Trzeba jeszcze
tylko wymyślić sposób jak kamerę połączyć z celownicą i całość zamontować na
montażu.
2.2.1 Liniowość kamery Philips Vest Pro PCVC680K
Problem liniowości detektora CCD opisano w poprzednim rozdziale. Kamera
wykorzystana w tej pracy nie jest liniowa. Biorąc pod uwagę fakt iż inne kamery
wyposażone są w detektory podobnej klasy, raczej jest mało prawdopodobne, że
w przypadku innych modeli będzie inaczej. Można zatem przyjąć, że CCD jakie
występują w oferowanych na rynku urządzeniach nie są liniowe.
W wyniku przeprowadzonego testu liniowości uzyskałem następującą krzywą.
liniowość kamery wyznaczona dla stałej gwiazdy
średnia liczba zliczeń
700
600
500
400
300
200
100
0
0
2000
4000
6000
8000
10000
12000
14000
16000
czas ekspozycji (m s)
Na wykresie widać, że w pewnym obszarze kamera jest liniowa (miedzy 100 a 450
zliczeń), lecz później następuje zanik liniowości. Ten wykres mówi nam również wiele
o dynamice urządzenia mieszczącej się w przedziale 100-700 zliczeń na piksel. Przy
większych wartościach następuje wysycenie i prześwietlenie piksela przez prąd ciemny,
a co za tym idzie, czułość spada do zera.
Poniżej przedstawiona jest zależność opisująca odchylenie od liniowości.
Dzięki niej można wprowadzać poprawkę na brak liniowości.
52
Odchylenie od liniowości
2000
3
1800
"rzeczywista" ilość zliczeń
2
y = 6E-06x - 0,0019x + 1,2436x + 19,635
1600
1400
1200
1000
800
600
400
200
0
0
100
200
300
400
500
600
700
obserw ow ana ilość zliczeń
Na wykresie znajduje się liczba zliczeń jaką otrzymano (oś x) i liczba zliczeń jaka
powinna być gdyby kamera była liniowa (oś y). W efekcie wykreślenia tej zależności
uzyskano krzywą opisaną równaniem znajdującym się na wykresie. Wstawiając
otrzymaną liczbę zliczeń za x do równania, obliczamy liczbę zliczeń, jaka powinna
zostać otrzymana w przypadku liniowego CCD.
Jeżeli chcemy wyznaczyć minimum, to nie ma to istotnego wpływu na wyniki
pomiarów, gdyż efektem zjawiska braku liniowości jest wypłaszczenie lub pogłębienie
krzywej zmian jasności. Zatem na sam moment wystąpienia minimum nie ma to
większego wpływu. Jeżeli jednak celem jest wyznaczenie amplitudy, lub wykonanie
pomiarów absolutnych, to wykonanie korekty jest konieczne.
2.2.2 Szum kamery Philips Vesta Pro
Kamera internetowa wyposażona w detektor CCD, wykazuje istnienie szumów
charakterystycznych dla każdego detektora tego typu, o których wspominałem już
wcześniej. Aby zmniejszyć skalę zjawiska można chłodzić detektor za pomocą małego
wiatraczka, wiąże się to jednak ze zmianą obudowy lub jej modyfikacją. Bez tego
stopień chłodzenia detektora jest zdeterminowany przez warunki panujące na zewnątrz.
53
Ilość prądu ciemnego zależy od czasu ekspozycji. Wykonałem test kamerki Vesta,
otrzymując następująca krzywą:
800
liniowosć a prąd ciemny
gwiazda
srednia liczba zliczeń
700
prąd ciemny
600
500
Log.
(gwiazda)
400
Wielom.
(prąd
ciemny)
300
200
100
0
0
4000
8000
12000
16000
20000
24000
czas ekspozycji zadany (ms)
Na powyższym wykresie widać, że szum kamery jest stabilny i utrzymuje się na
poziomie około stu zliczeń przy czasie ekspozycji nie większym niż 14-15 sekund.
Oznacza to, że na tym poziomie utrzymuje się readout noise, a prąd ciemny jest poniżej
jego poziomu. Potem ilość prądu ciemnego bardzo gwałtownie rośnie!
Druga krzywa otrzymana została za pomocą testu liniowości. Łatwo wywnioskować, że
wydłużając czas ekspozycji dojdziemy do punktu w którym te dwie krzywe widoczne
na wykresie się przetną. W tej sytuacji klatka zostanie prześwietlona
przez prąd
ciemny, a przedział pracy zawęża się do zera.
Wzrost szumów wpływa nam na rozrzut wyników pomiarów. Im bardziej
wychodzimy poza obszar liniowości, tym większy mamy rozrzut punktów
pomiarowych składających się na krzywą zmian jasności. Zjawisko to obrazuje
poniższy wykres:
54
1,4
3x4,5 sekundy
5x23,5 sekundy
1,2
1x9,5 sekundy
rozrzut [mag]
1
0,8
0,6
0,4
0,2
0
5,9
6,3
6,7
7,1
7,5
7,9
8,3
8,7
9,1
9,5
9,9
10,3
10,7
11,1
jasność gwiazdy [mag]
Widać na nim rozrzut wyników otrzymanych w przypadku zdjęć na które składały się:
3 klatki, po 4 i pół sekundy ekspozycji każda (kolor niebieski), następnie 5 klatek
o czasie ekspozycji 23 i pół sekundy każda (różowy) i pojedyncze zdjęcie o czasie
ekspozycji równym 9 i pół sekundy (zielony). Zatem wydłużając czas ekspozycji,
oczywiście w pewnych granicach, możemy szum trochę zredukować, co da nam
możliwość obserwacji słabszych gwiazd, niemniej jednak i tak w pewnym momencie
rozrzut osiągnie dosyć duże wartości. Z wykresu widać, że minimów gwiazd o jasności
mniejszej niż 10 magnitudo praktycznie nie da się wyznaczyć.
2.2.3 Dynamika kamery Philips Vesta Pro
Dynamika kamerki nie jest zbyt duża. Pracuje w przedziale od 100 do 700
zliczeń, przy czym przedział względnej liniowości to 100-500 zliczeń. Prąd ciemny
oscyluje nam w przedziale od zera do stu zliczeń i jest w procesie redukcji odejmowany
od obrazka, zatem wszystkie obiekty zarejestrowane przez kamerkę, od których liczba
zliczeń nie przekroczy 100, zostaną usunięte wraz z nim. Osiągniecie górnej granicy
700 zliczeń oznacza prześwietlenie piksela. Jest to o tyle niebezpieczne, że w takim
przypadku na skutek wystąpienia bloomingu można zniszczyć obrazek, a przede
wszystkim nie wiadomo ile fotonów nie zmieściło się w studni potencjału.
55
2.3 Oprogramowanie
Część niezbędnego oprogramowania jest dostępne w sieci internet za darmo,
cześć to programy komercyjne za które trzeba zapłacić. Oto proponowany zestaw
programów, który wykorzystano w trakcie badań:
• Gcvs2cat – do tworzenia plików *.cat
Freshcat – do aktualizacji plików *.cat
• Mebs – do planowania obserwacji
• CLR Script – do pisania skryptów
• AstroVideo – do obserwacji
• Ptelcat – do liczenia poprawki heliocentrycznej
• SAOImage DS9 – do dobrania odpowiedniego czasu ekspozycji i podglądu
• AIP4WIN – do fotometrii
• UltraEdit32 – do obróbki plików tekstowych
• Arkusz kalkulacyjny – do tworzenia wykresów
• AVE – do wyznaczania minimów
OC7 – do porównania z efemerydą
2.3.1 Gcvs2cat
Program pracujący w trybie MS-DOS służący do tworzenia plików w formacie
*.cat. GCVS to skrót od nazwy General Catalog of Variable Stars 20 i to właśnie
z katalogu gwiazd zmiennych tej organizacji pobierane są dane dotyczące wybranej
efemerydy. Programów typu Gcvs2cat jest kilka (Sac2cat – pobiera informacje
z katalogu SAC21, Hip2cat – katalog Hipparcos itp.), lecz wszystkie działają w ten sam
sposób, różnica polega na tym, że informacje dotyczące efemeryd pobierane są z innych
katalogów. Programy są dostępne w internecie i można je nieodpłatnie ściągnąć22.
20
www.sai.msu.su/groups/cluster/gcvs/gcvs
Supplement Annular Cracoviensis
22
Adres strony: www.as.wsp.krakow.pl/gzz/en/prog.htm
21
56
Zasada
działania
wygląda
następująco.
Podajemy
nazwę
gwiazdy
i gwiazdozbioru, według instrukcji wyświetlanej przez program. Po wpisaniu nazwy
gwiazdy i gwiazdozbioru program rozpoczyna wyszukiwanie żądanej gwiazdy. Po
chwili wyświetla informacje zawarte w utworzonym przez niego pliku *.cat. Plik
zostaje utworzony na dysku w tym samym miejscu w którym znajduje się program.
2.3.1.1 Plik *.cat
Jest to plik tekstowy zawierający informacje dotyczące efemerydy. Oto
przykład:
RZ Cas P
SAC m A1 A2 6.18 1.54 0.08
2 48 54.0 69 38 0.0 2001.0 0.200 0.0 1.1952578
2452500.5672 0.5
Pierwsza linia to nazwa gwiazdy i ewentualne komentarze. W drugiej linii znajduje się
ciąg liczb. Są to po kolei: rektascensja, deklinacja, epoka, czas trwania zaćmienia
(ozn. D), czas trwania płaskiego dna (ozn. d), okres, następnie moment początkowy
(ozn. MO) i na końcu znajduje się faza minimum wtórnego. Istnieje możliwość
utworzenia pliku zawierającego wiele gwiazd, który możemy wykorzystać wielokrotnie,
co niewątpliwie oszczędzi sporo czasu. Z plikami tego typu pracują następujące
programy23: Freshcat, Mebs, Ptelcat i OC7.
2.3.2 Freshcat
Program pracujący z plikami *.cat. Dzięki niemu można modyfikować
utworzone już wcześniej pliki. Ja osobiście używałem tego programu do porównania
z efemerydą24 opracowaną przez prof. dr hab. J.M. Kreinera i ewentualnej zamianie
pewnych danych znajdujących się w utworzonym wcześniej (w programie Gcvs2cat)
pliku, na te znajdujące się w opracowaniu prof. Kreinera. Modyfikacja polega na
wstawieniu przez program nowej wartości momentu początkowego i okresu, który
program pobiera z pliku tekstowego zawierającego nowe dane. Można ręcznie wpisać
nowe wartości, lecz program działa szybko i jest bardzo łatwy w obsłudze, zatem
23
24
Wszystkie są do ściągnięcia na stronie MSO w sieci GZZ: www.as.wsp.krakow.pl/gzz/en/prog.htm
Dostępna na stronie: www.as.wsp.krakow.pl/ephem/
57
skorzystanie z niego to ogromna oszczędność czasu, zwłaszcza gdy w pliku jest kilka
lub kilkanaście gwiazd.
Całą operację zaczyna się od skopiowania wcześniej utworzonego pliku do
miejsca w którym znajduje się Freshcat. Następnie uruchamia się program. Program po
uruchomieniu poprosi o wpisanie nazwy pliku który ma być zmodyfikowany. Następnie
należy wpisać nazwę jaką ma otrzymać zmodyfikowany plik. Należy podać nazwę
i rozszerzenie (*.cat). Program nie wyświetla żadnych informacji oprócz tej, że
skończył i jest gotowy do dalszej pracy. Zaktualizowany plik zapisany zostaje w tym
samym miejscu do którego został skopiowany plik przeznaczony do modyfikacji.
2.3.3 Mebs
Używa się go do planowania naszych obserwacji. Pracuje on z plikami *.cat
i tworzy pliki o rozszerzeniu *.mbs (przykład w załączniku numer 4).
Tak jak poprzednio opisywane programy również pracuje w środowisku MSDOS. Pracę należy zacząć od skopiowania odpowiedniego pliku *.cat do miejsca na
dysku w którym znajduje się program Mebs.
Na początku program pyta się o plik *.cat. Należy jego nazwę wpisać wraz
z rozszerzeniem, dokładnie taką jaka jest. Program zasugeruje nazwę pliku *.mbs który
utworzy. Jeżeli proponowana nazwa jest nieodpowiednia, za pomocą klawisza „n”
wprowadza się własną nazwę. Jeżeli jednak sugerowana nazwa odpowiada
użytkownikowi to za pomocą klawisza „y” przechodzi on do kolejnego etapu.
W kolejnym kroku program pyta się o maksymalną odległość zenitalną dla
obserwacji,
jednocześnie
sugerując
75
stopni.
Jeżeli
sugestia
odpowiada
użytkownikowi, wciska klawisz „n” i przechodzi dalej. Jeżeli jest inaczej to poprzez
przyciśniecie klawisza „y” istnieje możliwość zasugerowania programowi innej
wartości.
W dalszej części program się pyta czy ma wyświetlić jedynie te dni w których
występuje minimum, czy wszystkie. Warto w tym miejscu wybrać opcję dni
z minimami, gdyż w przypadku wyboru opcji z wszystkimi dniami, w pliku tekstowym
znajdzie się oprócz interesujących użytkownika danych, mnóstwo niepotrzebnych
informacji. Przyciśnięcie literki „o” to wybór dni z minimami, przyciśnięcie „a”
spowoduje, że w pliku znajdą się wszystkie dni.
58
Następnie wprowadza się datę: dzień, po spacji miesiąc (jeżeli jest na przykład
maj wystarczy wpisanie samej piątki bez poprzedzającego ją zera) i po kolejnej spacji
rok (w całości – 4 cyfry). Na koniec podaje się liczbę dni na przód (tu ilość jest
dowolna) do policzenia.
Program wyświetla informacje że liczy, po chwili kończąc i pytając się czy
kontynuować liczenie. Naciśniecie klawisza „n” spowoduje wyjście z programu,
a klawisza ”y” rozpoczęcie całej procedury od początku. Oczywiście niezależnie od
tego jaką decyzję podejmie użytkownik, dane nie zostaną utracone danych (chyba że
zostaną nadpisane w czasie wykonywania kolejnych obliczeń). Program utworzy plik
*.mbs na dysku w miejscu gdzie się znajduje, a nazwa pliku będzie identyczna
z zadaną.
Istnieje możliwość pobrania z internetu polskiej wersji25 programu Mebs.
2.3.3.1 Plik *.mbs
Jest to plik tekstowy. Zawarte są w nim informacje kiedy według efemerydy
wystąpi zaćmienie. Oto jego przykładowy fragment:
============================================
DATE : 10-APR-2005 / 11-APR-2005 SUN / Mon
================================================================================================
HOURS UT -> 15 16 17 18 19 20 21 22 23 0 1 2 3 4 5 6 <- UT
================================================================================================
UZ Lyr Phase -> .....................83 84 85 87 88 89 90 91 92 93>94>95>96>98>99>00-01<02<03<................. <- Phase
UZ Lyr ZDist -> ..............c..c..n89a87 85 82 79 76 72 68 64 60 55 51 46 41 36 31a26n22n18c................. <- ZDist
W pierwszym wierszu znajduje się data i dzień, a tak w praktyce to dwie daty
i dwa dni (obserwujemy przecież w nocy). Niżej znajduje się czas podany w godzinach
UT26, co oznacza, że latem należy do podanej dodać dwie godziny, a w zimie jedną.
Pod czasem znajduje się nazwa gwiazdy a za nią dwa ciągi liczb (jeden pod drugim).
Pierwszy ciąg informuje o fazie i głównie on interesuje użytkownika, bo w nim zawarta
jest informacja o tym kiedy przewidywane jest minimum, natomiast drugi, znajdujący
się pod nim, informuje o odległości zenitalnej. Odległość zenitalna podawana jest
w stopniach i liczona jest z prościutkiego wzoru:
25
26
www.as.wsp.krakow.pl/gzz/en/prog.htm
Universal Time, czyli czas Greenwich
59
Odl.Z = 90 – wysokość nad horyzontem
(2.1)
Informuje ona, czy gwiazda nie będzie zachodzić w trakcie obserwacji. W ciągu
znaków widnieją małe literki c, n i a. Oznaczają one zmierzchy kolejno: cywilny,
nautyczny i astronomiczny. Kropki oznaczają, że trwa dzień.
Moment zaćmienia wskazują znaki nierówności skierowane do siebie tak jak
pokazane jest to poniżej.
... 98 99 00 01 02 ...
lub
... 97 98 99 00 01 02 03 ...
Ten drugi przypadek będziemy mieć, gdy minimum gwiazdy posiada płaskie dno. Znak
„>” oznacza, że jasność gwiazdy słabnie, a „<” że wzrasta.
Jeżeli plik mebs został utworzony z pliku *.cat zawierającego kilka gwiazd,
będzie on zawierał wszystkie te gwiazdy jakie znajdowały się w tym pliku.
2.3.4 CLR Script
Pracujący
w
środowisku
Windows
program
do
pisania
skryptów
umożliwiających automatyzację czynności wykonywanych przez użytkownika za
pomocą myszy (przyciskanie przycisków, otwieranie zakładek itp.). Jest to program
shareware’owy. Język programowania jest bardzo podobny do języka C i Windows
API, zatem dla użytkownika zaznajomionego z nimi nie powinien być trudny do
opanowania.
60
Na potrzeby badań zostały napisane dwa skrypty (załączniki 5 i 6):
Start
Fotografia
Pierwszy uruchamia program AstroVideo (o nim za chwilkę), ładuje sterowniki
kamery, ustawia wszystkie parametry (o nich przy omawianiu AstroVideo) i przełącza
AstroVideo na tryb „Nightvision”27. Po jego uruchomieniu i odczekaniu aż wykona
wszystkie polecenia (wszystkie wykonywane czynności wyświetlane są w prawym
dolnym rogu monitora), kamerka jest gotowa do pracy. Oszczędza to wiele czasu,
zwłaszcza w przypadku resetowania komputera.
Po uruchomieniu drugiego skryptu, kamerka cyklicznie wykonuje ekspozycje
(zadany jest jej czas w AtroVideo). To z kolei eliminuje konieczność ciągłej obecności
obserwatora przy sprzęcie i wykonywania przez niego żmudnie powtarzanych operacji
naciskania klawisza „Capture”. W efekcie wystarczy co jakiś czas sprawdzać czy
gwiazda za bardzo nie ucieka z pola widzenia i dokonywać odpowiednich korekt przy
pomocą drobnych ruchów montażu.
27
Wszystko wyświetlane jest w tonacji czerwono-czarnej, aby nie osłabiać czułości oka obserwatora
61
Język pisania skryptów jest opisany w menu pomocy programu. Pliki napisane
w CLR Script są plikami tekstowymi o rozszerzeniu *.csp. W przypadku gotowych
plików .csp wystarczy je załadować do programu i uruchomić za pomocą klawisza F5.
Ważne jest aby pamiętać, że należy dać czas komputerowi na wykonanie
zadanej operacji. Nie może się wszystko dziać jedno po drugim. W tym celu w skrypcie
ustawia się pauzy. Czas ich trwania podaje się w milisekundach (mS). Pauza musi być
tak dobrana, aby w jej trakcie komputer zdążył wykonać operacje, w innym przypadku,
kiedy operacja nie będzie ukończona przed zakończeniem pauzy, kolejna nie zostanie
wykonana i zrobi się bałagan. Należy na to zwrócić szczególną uwagę!
2.3.5 AstroVideo
Program który kontroluje pracę kamerki. Wykonuje obserwacje i ich zapis na
dysku komputera. Pracuje on w środowisku Windows i musi być cały czas
uruchomiony podczas pracy kamery.
Okno z lewej (Input Window) to okno w którym wyświetlany jest aktualny podgląd,
a po zakończeniu ekspozycji pojawia się tam zarejestrowane zdjęcie. W drugim oknie
(Capture Window) znajduje się ostatni wykonany obrazek. Dzięki nim można
kontrolować czy gwiazda nie ucieka z pola widzenia kamerki.
Ikony widoczne nad lewym oknem to po kolei: Capture setup, Preview,
Capture, Setup port, About i Help.
62
Capture setup (obok) – dostęp do menu
w którym ustawia się między innymi:
katalog w którym zapisywane maja być
zdjęcia (Image directory), ile klatek ma
składać się na nasz obrazek (Frames
per
image),
oraz
ile
ma
być
wykonanych obrazków (Total images).
Oprócz tego można włączyć opcję
Colour images, przy czym na potrzeby
fotometrii należy odznaczyć kwadracik,
gdyż wykonując kolorowe zdjęcia traci
się nieco na czułości. Jest tutaj również
opcja
automatycznego
zapisywana
zdjęć na dysku. Należy ją włączyć.
Resztę ustawień proponuję pozostawić
bez zmian, zwłaszcza opcje wyświetlania obrazków w czasie pracy kamery,
gdyż wtedy działa bieżący podgląd tego co się dzieje.
Preview – przycisk włączający aktualny podgląd. W oknie po zakończeniu
ekspozycji pojawi się uzyskany obrazek.
Capture – wyzwalacz, po jego naciśnięciu rozpoczyna się ekspozycja, która
trwa tyle czasu, ile zadane zostało w programie. Napisany skrypt sam wykonuje
czynność uruchamiania wyzwalacza.
Setup port – opcje portów, nie ma konieczności ich ruszać.
About – wyświetla informacje o wersji programu.
Help – uruchamia pomoc.
Powyżej znajduje się menu tekstowe, powszechnie występujące w aplikacjach
windowsowskich. Najważniejsze z punktu widzenia zastosowań fotometrycznych są:
Driver, Capture (a w nim Setup), Video (Source) i Camera (Enable long exposure i
Setup long exposure).
Driver – w tej zakładce wybiera się sterownik kamery jaki ma zostać załadowany
do programu. Zazwyczaj jest tylko jedna możliwość wyboru. Od tego momentu
kamera zostaje włączona i dostępny jest podgląd w lewym oknie.
63
Capture Setup – opisany na poprzedniej stronie, bezpośredni dostęp do niego
umożliwia pierwszy od lewej przycisk w menu nad oknem.
Video Source – ustawia się tu pewne parametry o których napisane zostało
wcześniej.
Zakładka Image controls (patrz powyżej28); tutaj w polu Framerate należy
zmienić wartość na 5 klatek na sekundę. Resztę pozostawić bez zmian. Następnie
w zakładce Camera controls (kolejna strona29) należy ustawić suwak w polu Shutter
speed, na pozycję skrajnie lewą, natomiast w polu Gain całkiem w prawo. W polu
White balance zaznaczyć należy opcję Outdoor, a w polu Exposure wyłączyć opcję
Auto. Te wszystkie czynności może wykonać odpowiednio napisany skrypt.
28
29
Zdjęcie zapożyczone ze strony: www.cosmo.prv.pl
Zdjęcie zapożyczone ze strony: www.cosmo.prv.pl
64
Camera
Enable
long
exposure – uruchamia opcję umożliwiającą
wykonywanie zdjęć o długich czasach ekspozycji.
Camera Setup long exposure – tutaj należy ustawić jeden parametr, jednak
szalenie ważny. Znajduje się tutaj czas ekspozycji (poniżej, okno Exposure
time). Czas ten podany jest w milisekundach (mS)!
AstroVideo jest programem komercyjnym, ale jest wart zakupienia. Nie
zaszkodzi również rozejrzeć się za podobnymi programami dostępnymi w sieci za
darmo.
65
Prócz tych opcji w zakładce Video można ustawić rozdzielczość robionych
obrazków, oraz rodzaj kompresji. W tym przypadku obrazki zostały zarejestrowane
w rozdzielczości 320 x 240 pikseli (przy większej wyskakiwał błąd krytyczny
Windowsa związany z grafiką) i bez kompresji (Full Frame „Uncompressed”).
AstroVideo zapisuje obrazki w formacie FITS z rozszerzeniem *.fit.
2.3.5.1 Pliki w formacie FITS (Flexible Image Transport System)
Zdjęcia uzyskane z CCD nie są typowymi obrazkami w popularnych formatach
typu JPEG, GIF, bitmapa (.bmp), czy też TIF. Oczywiście istnieje możliwość ich
późniejszego przeformatowania na jeden z wyżej wymienionych formatów (nawet
AstroVideo oferuje tę możliwość), jednak do fotometrii potrzebujemy pliki FITS.
Rys. 38. Przykładowy obrazek w formacie FITS (zdjęcie własne)
Plik FITS jest ogólnie przyjętym standartem w astronomii. Składa się taki plik
z trzech głównych części: nagłówka (header), obrazka (image data) i końcówki (tailer).
W nagłówku (załącznik numer 7) znajduje się kilka przydatnych informacji. Są
to: standard, liczba bitów w formacie, liczba wymiarów, szerokość obrazka podawana
w pikselach, wysokość obrazka (również w pikselach), data obserwacji, godzina
obserwacji, czas ekspozycji, komentarz (np. ile klatek składa się na obrazek), nazwa
obiektu który był obserwowany. Header może zawierać znacznie więcej informacji niż
opisany powyżej i zazwyczaj tak jest. W przypadku gdy plik FITS pochodzi
z profesjonalnej kamery CCD header jest bardzo rozbudowany. Oto przykład:
66
SIMPLE =
T
BITPIX =
-16 / unsigned 16-bit integers
NAXIS =
2 / 2-dimensional image
NAXIS1 =
100 / x dimension
NAXIS2 =
100 / y dimension
BAXIS1 =
1 / x binning factor
BAXIS2 =
1 / y binning factor
DATASEC = '[1:100,1:100]' / image section containing data
VERSION = 'MCCD version 2.1' / version of the acquisition software used
IMAGETYP= 'dark
' / type of image
SUBSET = 'V
' / filter used
OBJECT = 'ngc6302
' / the name of the object observed
OBSERVER= 'Michael Ashley ' / the name of the observer
RA =
18.12320000 / right ascension [hours]
DEC =
-33.44300000 / declination [degrees]
CRVAL1 =
210.56466666 / right ascension of reference position [degrees]
CRVAL2 =
-33.44300000 / declination of reference position [degrees]
EQUINOX =
2000.000 / equinox of coordinates
EPOCH =
1995.400049 / epoch of observations
CRPIX1 =
50 / x coordinate of reference position [pixels]
CRPIX2 =
50 / y coordinate of reference position [pixels]
XPIXELSZ=
22.5 / x pixel size [microns]
YPIXELSZ=
22.5 / y pixel size [microns]
PLATESCL=
419.111 / plate scale [arcsecs/mm]
XCOEFF1 =
/ 1st X coeff [arcsecs/mm]
XCOEFF2 =
/ 2nd
YCOEFF1 =
/ 1st Y coeff [arcsecs/mm]
YCOEFF2 =
/ 2nd
DATE-OBS= '15/05/1995'
/ local date of observation [DD/MM/YYYY]
TIME-BEG= '13:11:45.665'
/ local time of exposure [HH:MM:SS.SSS]
TIMEZONE=
10 / local time - UT [hours]
EXPTIME =
120.000 / exposure time [seconds]
DARKTIME=
120.000 / total time since erased [seconds]
CAMGAIN =
1 / preamp gain [0 = low; 1 = high]
CAMSHIFT=
0 / number of bits shifted right
CAMSPEED=
0 / readout speed [0 = low; 1 = high]
CCDREAD =
4.7 / readout noise [electrons]
CCDGAIN =
10.2 / CCD gain [electrons/adu]
FOCUS =
120 / focus position [steps]
OBSERVAT= 'SSO
'
/ observatory
LAT_OBS =
-31.27336 / observatory latitude [degrees]
LONG_OBS=
210.93881 / observatory longitude [degrees]
ALT_OBS =
1149 / observatory altitude [meters]
TIMEZONE=
-10 / observatory timezone [hours]
TELESCOP= 'AUTOMATED PATROL TELESCOPE'
INSTRUME= 'WRIGHT CAMERA; EEV CCD; 770x1152'
INSTITUT= 'UNIVERSITY OF NEW SOUTH WALES'
EMAIL = '[email protected]' / Michael Ashley's e-mail address
Obrazek zakodowany jest w postaci macierzy binarnej. Standartowo
obsługiwane jest 5 formatów:
8-bitowy (liczby naturalne),
16-bitowy ze znakiem (liczby całkowite),
32-bitowy ze znakiem (liczby całkowite),
16-bitowy bez znaku (liczby naturalne),
32-bitowy bez znaku (liczby naturalne).
67
Wymagany format jest ściśle określony, w związku z tym żaden komputer nie powinien
mieć kłopotów z odczytem pliku zapisanego w formacie FITS na innym komputerze.
Końcówka zawiera liczbę zero kodu ASCII. To jest po prostu zakończenie
pliku, ale może zawierać dodatkowe informacje. Znajduje się tam zapisany cały proces
redukcji, a dokładnie wszystko co się działo z FITS-em.
2.3.6 Ptelcat
Program dosowy, przy pomocy którego można monitorować obserwacje
i który wylicza na bieżąco poprawkę heliocentryczną. Pracuje na plikach *.cat, które
należy uprzednio skopiować do miejsca w którym program się znajduje i załadować je
do niego. Odbywa się to w następujący sposób. Po włączeniu programu należy podać
strefę czasową w postaci cyferki (Ptelcat sugeruje jaka liczba jest poprawna). Po
zadaniu strefy uruchamia się menu. Po wybraniu literki „o” program prosi o wpisanie
nazwy pliku *.cat. Po wpisaniu nazwy pojawi się lista gwiazd do wyboru, jeżeli plik
zawierał kilka gwiazd (w przypadku gdy była tylko jedna gwiazda, jest tylko jeden
wybór). Odpowiednią cyferką znajdującą się przy interesującej użytkownika gwieździe
zadaje się gwiazdę i program zaczyna działać. Na monitorze wygląda tak:
68
Obserwując fazę (obrazek powyżej) użytkownik widzi kiedy minimum się
rozpoczęło i kiedy się kończy, co zapobiega rejestrowaniu zdjęć w momencie kiedy nic
się nie dzieje. Są tu również podane współrzędne co ułatwia odnalezienie gwiazdy na
niebie. Poza tym są tu jeszcze podane podstawowe informacje dotyczące efemerydy
(górna część), czas i wiele innych użytecznych informacji.
Dodatkową
korzyść
jaką
daje
Ptelcat
jest
wyświetlana
poprawka
heliocentryczna. Ptelcat nie tworzy żadnych dodatkowych plików na dysku.
2.3.7 SAOImage DS9 (Deep Space 9)
Pracujący w środowisku Windows program służący do podglądu plików FITS.
Interfejs DS9 przedstawiono poniżej.
Najistotniejsze jest okienko Value (na rysunku w czerwonym owalu). Cyfra tam
wyświetlona jest liczbą zliczeń z danego piksela (górne lewe okno to powiększenie
i tam można sprawdzić z którego konkretnie). W przypadku kamery Vesta jeżeli jej
69
wartość przekraczała liczbę 725 oznaczało to, że piksel został prześwietlony. Dzięki
temu robiąc kilka zdjęć tej samej gwiazdy (najlepiej tej którą mamy zamiar
obserwować) o różnym czasie ekspozycji, jest możliwość zorientować się na których
gwiazda jest prześwietlona, a na których niedoświetlona (to też jest groźne, gdyż
w czasie minimum liczba zliczeń od gwiazdy mogłaby spaść poniżej 100, a to
oznaczałoby utratę informacji o dnie). Zatem DS9 jest wyśmienitym programem dzięki
któremu można w łatwy i szybki sposób dobrać odpowiedni czas ekspozycji.
Poza tym program oferuje możliwość obróbki i modyfikacji gotowych już
FITS-ów, co szczególnie jest przydatne w fotografii CCD. Wyświetla również FITS
Header’y. SAOImage jest nieodpłatnie dostępny w internecie30, co czyni go najlepszym
wśród dostępnych tego typu programów na rynku.
2.3.8 AIP4WIN (Astronomical Image Processing)
Program pozwala na przeprowadzenie fotometrii, astrometrii, redukcji, obróbki
FITS-ów i wielu innych zawansowanych zadań. Niestety jest on trudno dostępny
i kosztuje w granicach 80 dolarów wraz z książką. Są jednak darmowe programy
oferujące podobne możliwości, choćby dosyć popularny w kręgach miłośników
astronomii pakiet Audela.
Program pracuje z plikami FITS i wypisuje wyniki w postaci plików
tekstowych (załącznik 8). O tym jak działa i co na nim można robić, opisane zostanie
w dalszej części pracy, gdyż wymaga to poświęcenia całego podrozdziału.
2.3.9 AVE
AVE (Analisis de Variabilidad Estelar) jest programem pracującym w środowisku
Windows i jest dostępny nieodpłatnie w internecie31. Również pracuje z plikami *.dat.
Jego zaletą jest interfejs graficzny, zatem oprócz wyniku rysuje wykres i zaznacza
policzone miejsce minimum, co jest ogromnym udogodnieniem, bo jest możliwość
wglądu w to co robi.
30
31
Adres strony: http://hea-www.harvard.edu/RD/ds9/
Adres strony: www.gea.cesca.es
70
Pracę z AVE zaczyna się od załadowania pliku *.dat. W tym momencie
program wyrysowuje krzywą, podając liczbę wszystkich punktów. Należy zaznaczyć
miejsce początkowe i końcowe (czerwona przerywana linia). Całą operację wykonuje
się za pomocą myszy, należy jednak zwrócić uwagę aby punkt początkowy i końcowy
znajdował się mniej więcej w tej samej odległości od szacowanego „na oko” momentu
minimum, wtedy pomiar będzie precyzyjniejszy. Po zaznaczeniu obszaru wybrać należy
z otwartego menu opcję „Find one”. Program znajduje minimum i zaznacza je niebieską
przerywaną linią (patrz obrazek), wypisując moment minimum w dodatkowym oknie
(te po prawej stronie na obrazka).
2.3.9.1 Plik *.dat
Jest to plik tekstowy zapisany z rozszerzeniem *.dat. Zawarte są w nim dwie
kolumny: w pierwszej znajduje się czas podany w dniach juliańskich z uwzględnioną
już poprawką heliocentryczną, a w drugiej różnica jasności pomiędzy gwiazdą zmienną
a gwiazdą porównania, podana w magnitudo. Taki plik jest tworzony, ponieważ
programy wyliczające minimum z krzywej zmian jasności pracują tylko i wyłącznie
z danymi w takim formacie.
71
2.3.10 OC7
Program pracujący w trybie MS-DOS. Służy do porównywania otrzymanych
wyników z przewidywanymi momentami minimów przez efemerydę. Ma on wiele
ciekawych opcji jednak ja generalnie stosowałem jedną z nich, czyli wyliczanie
wartości O-C z uzyskanych momentów minimów. Na początku wprowadza się plik
*.cat. Robimy to za pomocą klawisza „1”. Program pyta się o nazwę pliku z którego ma
zaczerpnąć
informacje
o
efemerydzie.
Należy
ją
dokładnie
wpisać
wraz
z rozszerzeniem. Aby nie było kłopotu z otwarciem pliku należy skopiować go
wcześniej w to samo miejsce na dysku, w którym znajduje się program. Istnieje również
możliwość ręcznego wpisania potrzebnych danych (wtedy zamiast „1” należy wcisnąć
„0”), mianowicie: momentu początkowego (Mo), okresu (P) oraz fazy minimum
wtórnego (q). Program wyświetla podstawowe dane o gwieździe, a dokładnie te
wielkości, które wprowadzone zostały z klawiatury.
Kolejnym krokiem jest wciśnięcie „5”, czyli wybór opcji liczenia minimum
z Mobs. Następnie po naciśnięciu klawisza „0” należy ręcznie z klawiatury wprowadzić
dane. Ręcznie wprowadzamy moment minimum policzony w AVE, po czym program
pyta się o rodzaj minima, tzn. czy jest to minimum główne, czy wtórne. „1” oznacza
minimum główne (pri.), a „2” wtórne (sec.). W przypadku kiedy nie znamy typu
minimum wprowadzić należy w tym miejscu zero. Po potwierdzeniu wpisanych danych
program wyświetli jedną linijkę, oraz całe menu pod nią.
Patrząc od lewej znajduje się tam o-c. Jest to różnica podawana w dniach
juliańskich pomiędzy momentem wyznaczonym w wyniku obserwacji, a momentem
kalkulowanym z efemerydy. Jeżeli wartość podana jest wartością dodatnią, to znaczy,
że minimum obserwowane wystąpiło później niż wynika z efemerydy, jeżeli natomiast
wyświetlona wartość jest ujemna, to znaczy, że chwila minimum wystąpiła wcześniej
niż spodziewana.
2.4 Proces obserwacji i redukcji.
Opisany w tym paragrafie model obserwacji jest szczegółowym opisem w jaki
sposób przeprowadzono badania na potrzeby niniejszej pracy i nie jest on jedynym
możliwym, zwłaszcza jeżeli dysponuje się innym oprogramowaniem. Inny sposób
72
proponowany przez Wojciecha Koralewskiego można znaleźć w internecie32 lub
w pracy dyplomowej Krzysztofa Całczyńskiego (tu opisany jest wspominany wcześniej
pakiet Audela) napisanej pod kierunkiem dr hab. Lecha Mankiewicza z Uniwersytetu
Kardynała Stefana Wyszyńskiego w Warszawie. Oczywiście istnieje wiele innych
opracowań.
Tworzymy odpowiednie pliki *.cat w programie Gcvs2cat (lub innym
podobnym, patrz opis programu). Gdy już pliki zostaną utworzone, umieszcza się je
w programie Mebs, który wypisuje kiedy spodziewane jest wystąpienie minimów.
W ten oto sposób obserwacje są zaplanowane i można przejść do aparatury.
Zaczynamy od uruchomienia skryptu start.csp w programie CLR Script. Po
chwili aparatura gotowa jest do pracy, a na monitorze uruchomiony program
AstroVideo. Wygodnie jest w tym miejscu utworzyć jakiś katalog roboczy, choćby na
pulpicie, aby do niego zrzucać obrazki próbne, czyli tak naprawdę śmieci, które po
zakończeniu obserwacji są niepotrzebne i można je usunąć z komputera. Oprócz
roboczego katalogu warto, a właściwie jest konieczne stworzenie katalogów do których
będziemy zapisywać flatfield, darkframe, obserwacje oraz darkframe dla flatfield.
W innym przypadku nad ranem na dysku znajdzie się nawet kilkaset lub kilka tysięcy
FITS-ów, które trzeba będzie przejrzeć i posegregować. W tym przypadku utworzone
zostało 5 katalogów, które zawierały nazwę gwiazdy oraz co w nich jest np.: RZCas
obserwacje, RZCas Dark, RZCas, Flat, Rzcas Dark dla Flat, oraz test (ten katalog
usuwany był po zakończeniu obserwacji).
Następnym krokiem jest wykonanie klatki flatfield. Aby zrobić dobry flatfield
konieczna jest jednolita pod względem oświetlenia i barwy płaszczyzna. Najprościej
jest wykorzystać w tym celu niebo przy zachodzie Słońca (kamerka była skierowana
pionowo do góry) i okazuje się to wystarczające. Flatfield można wykonać również
o wschodzie, czyli po zakończeniu obserwacji, najlepszy jest jednak wybór obu pór.
Można również sobie zrobić planszę do wykonywania płaskiego pola.
W programie AstroVideo w opcji Capture Setup wybierać należy katalog
roboczy i rozpocząć próbne fotografowanie. Wykonuje się je co jakiś czas, na przykład
co minutę i sprawdza co na nich widać. Gdy jest za jasno zdjęcia są całe prześwietlone,
jednak z czasem gdy robi się coraz ciemniej, zaczynają się na obrazkach pojawiać
zabrudzenia chipu. W tym momencie w Capture Setup zmienić należy katalog na ten
32
www.cosmo.prv.pl
73
w którym zapisywany będzie flatfield i wykonać kilka flatfield’ów (około 10-20
w zupełności wystarczy). Czas ekspozycji nie musi być taki sam jak czas ekspozycji
przy obserwacjach. Autor wykonywał ekspozycje dwusekundowe, w związku z czym
operacja przebiegała dosyć szybko. Nie jest to bez znaczenia, ponieważ w przypadku
wykorzystania nieba jako płaskiego pola, należy zdążyć zanim nie zrobi się zbyt
ciemno, bo wtedy na klatce flatfield pojawią się gwiazdy.
Następnym krokiem jest rejestracja klatki darkframe dla flatfield. Czas
ekspozycji powinien być taki sam jak przy wykonywaniu flatfield’ów. Po zakryciu
obiektywu (najlepiej firmową nakrywką nabytą wraz z obiektywem), wykonuje się taką
samą liczbę obrazków co w przypadku flatfiedu. Należy w tym miejscu pamiętać aby
przed wykonaniem zdjęć zmienić katalog do którego one będą zapisywane.
Po zakończeniu czynności znów należy zmienić katalog na roboczy i odszukać
na niebie obiekt obserwacji. Rejestruje się kilka zdjęć próbnych w dwóch celach.
Pierwszy z nich to ustawienie ostrości, co sprowadza się do ustawienia obiektywu.
Drugi to dobranie odpowiedniego czasu ekspozycji. W tym celu rejestruje się zdjęcia
tego samego obszaru, przy różnych czasach ekspozycji. Następnie w programie DS9,
kierując kursor na środek gwiazdy zmiennej, sprawdza się wartość wyświetlaną
w okienku Value. Dobrze dobrany czas jest wtedy, gdy liczba zliczeń mieści się
w przedziale 700-650 i nie są prześwietlone gwiazdy porównania.
Po dobraniu czasu ekspozycji należy zmienić katalog na ten w którym
obserwacje mają być zapisywane i uruchomić skrypt foto.csp. Od tego momentu rola
obserwatora ogranicza się do nadzoru czy wszystko przebiega bez zakłóceń i czy
gwiazda nie ucieka z pola widzenia kamery. Przy okazji można sobie uruchomić
program Ptelcat i monitorować kiedy zaćmienie się rozpoczyna, a kiedy kończy. Warto
zanotować sobie wyświetlaną przez program poprawkę heliocentryczną, która będzie
potem przydatna.
Po zakończeniu obserwacji przychodzi pora na zrobienie właściwych
darkframe’ów. Po wyłączeniu skryptu foto.csp, przykryciu obiektywu i zmianie
katalogu rejestruje się od 10 do 20 obrazków, których czas ekspozycji musi być
dokładnie taki sam jak podczas obserwacji, stąd czynność wykonywania ciemnych
klatek należy pozostawić na sam koniec.
Przy pomocy AIP4WIN wykonuje się redukcję i fotometrię (dokładny opis
w następnym rozdziale). Następnie otrzymane wyniki (w postaci pliku tekstowego)
kopiuje do programu UltraEdit32, lub innego edytora tekstu i tworzy w nim pliki *.dat
74
poprzez wycięcie zbędnych kolumn i zapisie z odpowiednim rozszerzeniem. Oprócz
tego należy skopiować wartości V-C [mag], oraz HJD do arkusza kalkulacyjnego
w celu wyrysowania krzywej zmian jasności. Pliki *.dat ładuje się do programu AVE,
który policzy moment minimum. Na końcu przy pomocy programu OC733 należy
porównać otrzymane wyniki z przewidywaniami efemerydy. Proces redukcji
i fotometrii jest ukończony. Schemat jego przebiegu można zobaczyć w załączniku
numer 9.
2.5 Redukcja i fotometria w programie AIP4WIN
AIP4WIN to potężne narzędzie analizujące zarejestrowane za pomocą CCD
pliki FITS. Może bardzo wiele począwszy od redukcji danych, poprzez składanie
kolorowych obrazków idąc, a kończąc na zaawansowanych urządzeniach do fotometrii
i astrometrii, czy też nawet spektroskopii, co właściwie czyni go profesjonalnym
narzędziem nie tylko amatorów astronomii, ale również i naukowców.
33
do ściągnięcia ze strony: www.as.wsp.krakow.pl/gzz/en/prog.htm
75
Po otwarciu i załadowaniu dowolnego obrazka program prezentuje się tak jak pokazane
to zostało na poprzedniej stronie.
2.5.1 Redukcja danych
Zaczynając od zakładki Calibrate, wybrać należy opcję Setup, a następnie
Advanced. Pojawi się następująco wyglądające okno
Od lewej strony znajdują się opcje redukcji Biasu, ciemnej klatki i flatfield’u. Poprawka
na Bias nie była w tym przypadku wykonywana, stąd lewa część nie została użyta.
W środkowej części dokonuje się redukcji prądu ciemnego. W okienku Select Dark
frame(s) załadować należy z odpowiedniego katalogu zdjęcia. Następnie włączyć
trzeba opcję Median Combine co oznacza, że program policzy medianę z zadanych
obrazków, po czym włączyć należy okienko Create Master Dark... W tym momencie
program ładuje zaznaczone pliki i wylicza z nich średnią medianę, tworząc tzw. główną
klatkę ciemną (Master Dark), której będzie używał do redukcji. Następnie w oknie
Flatfield Correction wykonać należy tę samą operację co w oknie Select dark
frame(s). Włączyć opcję Substract Flat-Dark i przyciskiem Select Flat-Darks
załadować pliki z obrazkami, które zarejestrowane zostały zaraz po zrobieniu
flatfield’ów (te z tym samym czasem ekspozycji co flatfield). Zarówno w górnej jak
i w dolnej części należy zaznaczyć opcję Median Combine, po czym nacisnąć przycisk
Create Master Flat. Program tworzy klatkę Master Flat, którą wraz z wcześniej
76
utworzoną ciemną klatką będzie wykorzystywał w procesie redukcji. Kolejność
wykonywania czynności jest nieistotna, można na przykład zacząć od okna Flatfield
Correction, a skończyć na Darkframe substraction i nie będzie to miało wpływu na
pracę programu. Utworzone master frames możemy zapisać, ale nie jest to konieczne.
Przy redukcji pojedynczych obrazków, można posłużyć się zakładką
Calibrate, a pod nią opcją Manual Calibration. Są tam trzy opcje: redukcja prądu
ciemnego (Substract Dark from Image), poprawka na płaskie pole (Apply Flat to
Image) i wycięcie prądu ciemnego z płaskiego pola (Substract Dark from Flat).
Wykonanie tej pierwszej czynności już wyraźnie poprawia jakość zdjęcia, ale użycie
kolejnych, niestety może ją nieco pogorszyć.
2.5.2 Fotometria
Gdy wykonane są już klatki Master Flat i Master Dark, można rozpocząć
proces fotometrii. Measure Photometry Multiple Image uruchamia fotometrię
wielu obrazków. Ta opcja, daje możliwość uzyskania wyników już po kilkunastu
minutach, gdyż komputer wykonuje seryjnie wszystkie czynności związane z procesem
fotometrii, czyli najpierw dokonuje redukcji, a następnie wykonuje pomiar i tak
z każdym kolejnym obrazkiem. Proces ręcznej fotometrii pojedynczych obrazków jest
ogromnie czasochłonny. W tym miejscu należy zwrócić uwagę na pewien fakt, że liczba
obrazków jaką na jeden raz można zadać, zależy od parametrów komputera. Przy zbyt
dużej liczbie zdjęć, proces zostanie przerwany i trzeba będzie zaczynać wszystko od
początku. Przy procesorze 266 MHz i 64 MB pamięci RAM bezpieczną liczbą będzie
80 FITSów na jeden raz.
Po uruchomieniu opcji fotometrii na monitorze pojawia się okno Multi-Image
Photometer (patrz poniżej).
77
Zaznaczenie okienka Calibrate Image, spowoduje że przed pomiarem kolejnego
obrazka program będzie dokonywał jego redukcji. Za pomocą przycisku Select Files
ładuje się pliki do programu. W tym momencie pojawia się wyredukowany obrazek,
który jest pierwszym z wybranej serii. Następnie należy odszukać i zaznaczyć kursorem
myszy konkretną gwiazdę. Pojawią się trzy białe kółeczka jedno w drugim. Te
najbardziej wewnętrzne to apertura i jego średnicę ustawić można w polu Star Aperture
(patrz obraz). Jak dobrać odpowiednią zostało omówione we wcześniejszej części
niniejszej pracy. Średnicę dwóch pozostałych okręgów ustawia się w polu Sky Annulus
i należy je tak dobrać, aby nie znalazła się w ich polu żadna inna gwiazda. Po
zaznaczeniu pierwszej gwiazdy, w polu Select Stars, wybieramy jej rodzaj. Są trzy
możliwości: gwiazda zmienna (V), gwiazda porównania (C) i gwiazda kontrolna (K).
Po zaznaczeniu gwiazdy zmiennej należy wcisnąć przycisk „V”. W tym momencie
kółeczka robią się niebieskie i pojawia się koło nich literka V. Tak samo postępuje się
przy wyborze gwiazdy porównania i gwiazdy kontrolnej. Efekt widoczny jest na zdjęciu
powyżej.
78
W polu Tracking Mode włącza się opcję Automatic, a w polu Target
Tracking, C,V,K Independently. To spowoduje, że gwiazdy będą odszukiwane przez
program na zdjęciu niezależnie. W kolejnym polu nazwanym Target Finding Radius
definiuje się maksymalny promień od gwiazdy, w którym na kolejnym obrazku będzie
jej szukał program. Promień początkowy zasugerowany wynosi 20, ale dobrze jest go
zmienić, ponieważ jest to zbyt duża wartość i w przypadku dużej ilości gwiazd na
obrazku, program może pomylić obserwowaną gwiazdę z sąsiednią, w efekcie czego
zafałszowane zostaną wyniki. Promień ten nie może być jednak byt mały, gdyż wtedy
przy niewielkim przesunięciu gwiazdy występującym na kolejnym obrazku, może dojść
do sytuacji kiedy opuści ona obręb apertury, co zakończy się wypisaniem komunikatu,
że obiekt nie nadaje się do fotometrii lub że wybrany obiekt nie jest gwiazdą, co jest
równoznaczne z tym, że program nic nie policzy.
Watro
w
tym
miejscu
zatrzymać
się
nad
pewnym
problemem.
W opracowaniach które można przeczytać w internecie, autorzy często pisali, że do
fotometrii przy pomocy kamerki nie potrzebne jest prowadzenie. Ciężko jest to sobie
wyobrazić, gdyż AIP4WIN radzi sobie z niewielkimi przesunięciami obrazu, ale przy
większych przeskokach (występujących na przykład na skutek korekt prowadzenia)
gubi gwiazdy. Można ewentualnie zrobić fotometrię pojedynczych obrazków, ale wtedy
zajmie to koło tygodnia pracy, zatem chyba lepiej dla wygody po prostu wyposażyć się
w napęd prowadzący aparaturę. Aby przeciwdziałać gubieniu gwiazd, warto notować
w trakcie obserwacji moment korekty montażu (najprościej wypisać numer pierwszego
FITSa zrobionego po korekcie) i do fotometrii ładować obrazki do momentu korekty
i w kolejnej porcji załadować obrazki od pierwszego wykonanego po korekcji układu
optycznego.
Na koniec należy zaznaczyć opcję Output Julian Day, co spowoduje, że
program wyświetli czas w dniach juliańskich. Pojawi się okno Julian Days Parameter.
I tu jest pewna pułapka (patrz wielkość w czerwonym owalu na obrazku). W pierwszym
oknie należy podać strefę czasową... ale nieco inaczej niż się tego należałoby
spodziewać. Tę liczbę godzin którą zazwyczaj dodaje się do uniwersalnego czasu (UT)
tu trzeba odjąć!!!34 Zatem gdy normalnie dodaje się dwie godziny, to tu je trzeba odjąć.
Drugie okno pozostaje bez zmian (liczba zero), natomiast w oknie Heliocentric
34
Problem ten dotyczy tylko programu AIP4WIN
79
Correction
wpisać
trzeba
wyliczoną
lub
wyczytaną
z
Ptelcata
poprawkę
heliocentryczną.
W oknie Multi-Image Photometer po naciśnięciu przycisku OK program zapyta się
o nazwę pliku tekstowego do którego ma wpisywać wyniki, oraz miejsce w którym ten
plik ma zostać zapisany na dysku. Program zaczyna liczyć, a na ekranie pojawiają się
kolejne obrazki. Gdy program kończy pracę z zadaną grupa plików wyświetla wykres
(poniżej).
Rys. 39. Wykres wyświetlany po zakończeniu fotometrii w AIP4WIN
Zbyt wiele on nie mówi, właściwie może służyć do nadzorowania czy wszystko
przebiega w porządku. Całą czynność powtarza się, wybierając kolejną grupę zdjęć przy
użyciu przycisku Select Files i podając nazwę kolejnego pliku tekstowego wraz
z lokalizacją, aż do momentu gdy przez program zostaną przepuszczone wszystkie pliki
FITS.
W wyniku pracy programu AIP4WIN na dysku pojawi się kilka plików
tekstowych z rozszerzeniem *.txt, zawierających mnóstwo informacji (patrz załącznik
8). Najistotniejsze są dwie kolumny: V-C [mag] i HJD. Obie te kolumny trzeba
skopiować do arkusza kalkulacyjnego, który wyrysuje krzywą zmian jasności (tu
przydaje się UltraEdit32), ale oprócz tego te dwie kolumny skopiować należy do
nowego pliku i zapisać go z rozszerzeniem *.dat, aby w programie AVE wyznaczyć
moment minimum.
80
3. Otrzymane wyniki
W trakcie badań zaobserwowano sześć spośród wyselekcjonowanych gwiazd
zaćmieniowych oraz wykreślono krzywe zmian jasności. Jednak wyznaczyć minima
udało się jedynie w dwóch przypadkach, co było związane z wieloma czynnikami do
których można zaliczyć miedzy innymi pogodę, fakt że część minimów trwała gdy
jeszcze był dzień lub kończyły się po świcie (w tym przypadku krzywe są niepełne).
W pierwszej części znajduje się tabela zawierającą gwiazdy i kilka ich parametrów,
następnie krzywe zmian jasności wszystkich gwiazd wykreślone w procesie fotometrii,
a na końcu wyznaczone minima i porównanie ich z wynikami przewidywanymi przez
efemerydę.
3.1 Kryterium doboru gwiazd
Wszystkie gwiazdy w tabeli są gwiazdami zmiennymi zaćmieniowymi, a ich
okres nie przekracza pięciu dni, stąd można je zakwalifikować do gwiazd
krótkookresowych. Ich jasność w maksimum jest większa niż 9.5 mag, a amplituda
przekracza wartość 0.6 mag.
3.2 Gwiazdy
W tabeli zestawiono listę obserwowanych gwiazd.
Nazwa
Jasność [mag]
Mo
Okres
RZ Cas
EK Cep
6.4 – 7.8
7.99 – 9.32
2452500.5672
2452505.473
1.19525780
4.42779100
U Cep
6.74 – 9.81
2452502.0318
2.49309770
WW Dra
RW Mon
TX UMa
7.65 – 8.3
9.0 – 11.3
7.06 – 8.8
2452502.16
2452501.181
2452500.183
4.62979000
1.90608000
3.06329200
3.3 Krzywe zmian jasności
Oto uzyskane przeze mnie krzywe zmian jasności sześciu powyższych gwiazd.
81
82
83
84
85
86
87
3.3 Wyznaczone minima
Udało się wyznaczyć minima dwóch gwiazd: RZ Cas i U Cep. Poniżej
w tabelach zostały zamieszczone szczegółowe informacje, wraz z wyznaczonymi
minimami policzonymi w programie AVE. Następnie obliczone minima zostały
porównane z efemerydą przy użyciu programu OC7.
3.3.1 U Cep
U Cep
Efemeryda
Mo
2452502.0318
Okres
2.49309770
Program
Moment minimum
Błąd pomiaru
AVE
2453267.4025
0.00013
Porównanie z efemerydą
O-C [JD]
- 0.009194
88
3.3.2 RZ Cas
RZ Cas
Efemeryda
Mo
2452500.5672
Okres
1.19525780
Program
Moment minimum
Błąd pomiaru
AVE
2453411.3563
0.00028
Porównanie z efemerydą
O-C [JD]
0.00286
Wyznaczono minima dwóch gwiazd, z dokładnością do kilkunastu sekund. Odchyłki
spowodowane mogą być niedokładnościami zegara laptopa który został użyty,
rozrzutem danych otrzymanych z kamerki lub uśrednieniem poprawki heliocentrycznej
(nieznacznie się ona zmienia w przeciągu kilku godzin, dobrze widać to w programie
Ptelcat), z drugiej strony nie wszystko musi się dziać tak jak przewiduje efemeryda...
89
4. Fotografia za pomocą kamery internetowej
Oprócz fotometrii kamerka znajduje zastosowanie w fotografii nieba. Można
za jej pomocą robić zdjęcia Księżyca, obiektów mgławicowych i gromad gwiazd,
a nawet robić filmy poklatkowe (np. zjawisk zaćmieniowych). W internecie można
znaleźć mnóstwo witryn klubów dyskusyjnych na których miłośnicy tej dyscypliny
chwalą się swoimi osiągnięciami i służą pomocną radą. Odnalezienie ich przy pomocy
przeglądarki Google™ nie powinno nikomu sprawić kłopotów. W dalszej części
prezentowane są zdjęcia otrzymane przez autora, jednak nie był to główny cel pracy.
Do obróbki zdjęć świetnie nadaje się AIP4WIN, jednak aby osiągnąć ciekawy
efekt można pobawić się również SAOImage DS9. W AIP4WIN wystarczy właściwie
otworzyć obrazek, ręcznie odjąć od niego ciemny prąd i efekt jest murowany. Robi się
to w bardzo prosty sposób. Po przygotowaniu głównej klatki ciemnej (tak jak przy
redukcji) i załadowaniu zdjęcia, w głównym menu w zakładce Calibrate, wybieramy
opcję Manual Calibration. Zaznaczyć należy opcję Substract Dark from Image.
Można jeszcze przeprowadzić korektę na flatfield, lecz w przypadku niektórych zdjęć
przeważnie psuje to ich jakość.
W DS9 natomiast w zakładce Color jest kilka ciekawych opcji filtrów, za
pomocą których można pobawić się zdjęciami.
4.1 Otrzymywanie barwnych zdjęć
Kamerką Vesta można otrzymywać barwne zdjęcia.
W
tym
celu
należy
przed
wykonaniem
ekspozycji
w programie AstroVideo w oknie AstroCapture
Setup
zaznaczyć opcję Colour images (strzałka). W wyniku tej
operacji po ekspozycji na dysku pojawią się trzy FITS-y o tej
samej nazwie, z tym że do niej dodany będzie w nawiasie
kolor do poszczególnych obrazków (red, blue, green). Ważne
jest aby pamiętać, że AstroVideo nie rejestruje kolorowych obrazów. FITS-y
z dopisanymi nazwami nie mają barwy. Program przewiduje, że przed każdą ekspozycją
użytkownik będzie zmieniać filtry. Zatem przy ekspozycji bez filtrów otrzymuje się trzy
90
czarno-białe zdjęcia. Sztuczne barwy jakich można
użyć w programie DS9 lub AIP4WIN mają na celu
podniesienie kontrastu i zwiększenie dynamiki
zdjęcia. Należy pamiętać, że kolory na obrazie są
sztuczne i nie mają nic wspólnego z rzeczywistością.
Aby w szybki sposób otrzymać z tych trzech
obrazków jeden kolorowy w programie AIP4WIN
wykonać trzeba następującą operację. Załadować
obrazki i odjąć od każdego z nich ciemną klatkę.
Następnie w menu głównym otworzyć zakładkę
Color i wybrać z niej opcję Join Colors. Otwiera się
okno (obok) w którego okienkach podać należy
odpowiednie pliki (w oknie red otwiera się FITS
z dodanym w nazwie nawiasem ze słowem red itd.)
Gdy już trzy pola będą wypełnione, otworzy się
dostęp do wszystkich przycisków znajdujących się
w oknie. Naciśnięcie przycisku Create New Color Image lub Auto Color spowoduje
utworzenie kolorowego obrazka złożonego z trzech FITS-ów uzyskanych z kamerki.
Teraz można pomanipulować gammą kolorów przy pomocy kolorowych przycisków
znajdujących się w polu Adjust Color and Luminosity. Kłopot w tym, że tak
utworzonego obrazka nijak nie można zapisać. Obraz można jednak przechwycić do
schowka za pomocą klawisza „Prnt Scrn”, a następnie wkleić go do programu MS
Paint, w którym zapisanie obrazu nie stanowi już żadnego problemu. Oto osiągnięcia
autora w dziedzinie fotografii CCD.
91
M42 w Orionie (średnica obiektywu 100 mm, f = 1000 mm)
Kometa Mahcholz (100mm, f = 1000 mm)
M 42 (obiektyw Helios)
92
Gwiazdozbiór Oriona (obiektyw Vesty)
M 31 w Andromedzie (obiektyw Helios)
93
Plejady (obiektyw Helios)
94
5. Ocena kamery i wnioski
Celem pracy była próba przeprowadzenia procesu fotometrii przy użyciu
kamery internetowej zbudowanej na bazie detektora CCD, a następnie ocena tego typu
urządzenia pod kątem zastosowań fotometrycznych. Cel ten został osiągnięty.
Uzyskano sześć krzywych zmian jasności i wyznaczono momenty minimów w dwóch
przypadkach. Proces badawczy doprowadził do sformułowania następujących
wniosków:
1. Kamerka jest urządzeniem nadającym się do zastosowań dydaktycznych, zarówno
na poziomie akademickim (pracownia astronomiczna) jak i szkolnym. Znajduje
również zastosowanie w amatorskich obserwacjach gwiazd zmiennych. Można za
jej pomocą robić fotometrię gwiazd o jasności rzędu 5 – 10 magnitudo, które
posiadają głębokie minima.
2. Jest doskonałym urządzeniem do fotografii nieba.
3. Kamerka może służyć do rejestrowania zjawisk astronomicznych typu zaćmienia
Księżyca lub Słońca, oraz można wykorzystać ją do robienia filmów
poklatkowych, przedstawiających różne zjawiska astronomiczne.
4. Należy unikać bardzo długich czasów naświetlania, gdyż wtedy rośnie szum
i pojawia się problem dużego prądu ciemnego.
5. Szum można zredukować wykonując zdjęcia w których na jeden FITS składa się
kilka obrazków.
6. Kamerka nie nadaje się raczej do obserwacji słabych obiektów, gdyż już przy
jasności mniejszej niż 10 magnitudo szum jest dość duży.
7. Poważną niedogodnością jest to, że w pobliżu kamerki musi znajdować się laptop
i zasilanie. Zatem wymaga się przenośnego źródła prądu.
Zacznijmy od zalet. Sprzęt jest lekki i poręczny, z dużą łatwością można go
skonfigurować z dowolnym układem optycznym (teleskop, obiektyw z przejściówką),
czyniąc to za przystępną cenę. Właśnie cena jest ogromnym atutem, gdyż za niewielkie
pieniądze otrzymujemy produkt, którego wachlarz zastosowań jest bardzo szeroki.
95
W astronomii zastosować można ją do łatwej w wykonaniu fotografii, a efekty
mogą być nadzwyczaj zadowalające. Oprócz tego przy odrobinie wysiłku można
wykonywać za jej pomocą fotometrię, przy czym dobry skutek działań w tym kierunku
jest zagwarantowany w przypadku gwiazd jaśniejszych niż 10 magnitudo. Poniżej tej
jasności pojawia się losowość polegająca na tym czy uda się coś zrobić czy też nie,
niemniej jednak nie wyklucza się udanych obserwacji. Zatem urządzenie może być
śmiało stosowane w pracowni astronomicznej lub na szkolnym kółku zainteresowań. Za
jej pomocą możemy zademonstrować jak przebiega profesjonalny proces badania
gwiazd zmiennych.
Kamera jest alternatywą dla badań gwiazd, które są już dobrze poznane,
w związku z czym nie budzą dużego zainteresowania i są nieco zaniedbywane wśród
profesjonalnych naukowców. Jest tu zatem pole dla całej rzeszy miłośników, którzy
przy pomocy kamerki mogą prowadzić regularne przeglądy tych właśnie gwiazd dając
swój nietuzinkowy wkład w dziedzinę nauki jaką jest astronomia.
Przy pomocy kamerki w bardzo prosty sposób można rejestrować zjawiska
zaćmieniowe i nagrywać je w formie filmów poklatkowych. Dzięki temu uzyskuje się
bardzo pomocny i efektowny materiał dydaktyczny, który można będzie wykorzystać
na zajęciach z fizyki, konferencjach lub podczas zebrań miłośników astronomii.
Pamiętać jednak w tym wszystkim należy, że kamera nie jest detektorem
najwyższej klasy i nie należy wymagać od niej cudów. Jest ona obarczona wszystkimi
niepożądanymi zjawiskami towarzyszącymi pracy detektora CCD, a zwłaszcza dużym
szumem, przeciwko któremu jest mała możliwość przeciwdziałania, gdyż konstrukcja
kamerki bardzo utrudnia zamontowanie chłodzenia na chip. W związku z czym szum
rośnie wraz z czasem ekspozycji co praktycznie uniemożliwia wykonywanie fotometrii
słabych gwiazd o jasności mniejszej niż 10 magnitudo. Zatem wielkiej nauki
dysponując kamerką nie da się robić.
Szum też powoduje, że gwiazd o płytkich minimach nie da się badać, ponieważ
aby wykonać fotometrię amplituda powinna być co najmniej trzy razy większa od
rozrzutu punktów pomiarowych. To oznacza że można zajmować się tylko gwiazdami
które posiadają głębsze minima o amplitudzie rzędu 0.6 magnitudo i więcej. Jest to
kolejne ograniczenie jakie spowodowane jest raczej nie najlepszą jakością chipu
w który wyposażona jest kamera.
Pozostaje zatem pytanie, czy warto wyposażyć swój warsztat w urządzenie
jakim jest kamera internetowa z matrycą CCD. Na to pytanie każdy pewnie odpowie
96
sobie sam. Ja niniejszą pracę zakończę tak: jest w dzisiejszych czasach bardzo
popularne określenie stosunku ceny do jakości produktu. Według mnie kamerka
wypada tutaj bardzo korzystnie, ponieważ daje nam za naprawdę przystępne środki
możliwość prowadzenia badań w zupełnie innym wymiarze. Posiadanie jej w swym
wyposażeniu daje prawo mówić użytkownikowi o swoim warsztacie jako o małym
laboratorium, gdyż uzyskiwane wyniki badań są obiektywne i namacalne, a co
najważniejsze zarchiwizowane. Zatem każdy zainteresowany może w każdej chwili z
nich skorzystać i wykorzystać je w bardziej zaawansowanych badaniach, a to już jest
coś.
97
Bibliografia
1. Richard Berry, James Burnell – „The Handbook of Astronomical Image
Processing”, Willmann-Bell Inc. 2000
2. J.M. Kreiner – „Astronomia z astrofizyką”, PWN, Warszawa 1988
3. Ian S. McLean – „Electronic Imaging In Astronomy, Detectors and
Instrumentation”, Praxis Publishing Ltd 1997
4. W. Iwanowska, A. Woszczyk – „Metody badawcze astrofizyki obserwacyjnej”,
UMK, Toruń 1978
Strony internetowe:
www.phys.uni.torun.pl/~bezet/pdf/f_det.pdf
www.zdrowie.med.pl/oczy/anat_i_fizjo/a_oczy.html
http://www.oko.info.pl/index.php?body=1101
http://www.wsp.krakow.pl/biofiz/prezentacja/tresc/detektor.htm
http://www.astro.amu.edu.pl/Staff/Tkastr/GeoPhys/geo-lec/node19.html
http://www.astro.amu.edu.pl/Staff/Tkastr/GeoPhys/geo-lec/node18.html
http://www.astro.amu.edu.pl/Staff/Tkastr/GeoPhys/geo-lec/node17.html
http://www.astro.amu.edu.pl/Staff/Tkastr/GeoPhys/geo-lec/node20.html
http://leksykon.pta.edu.pl/
http://portalwiedzy.onet.pl/51443,haslo.html
98
Załączniki
Załącznik 1
Obliczanie dni juliańskich z daty kalendarza gregoriańskiego35
R : Rok
M : Miesiąc
D : Dzien
JD : Dni Juliańskie
X = ( M + 9 ) / 12
A = 4716 + R + Int( X )
Y = 275 * M / 9
V=7*A/4
B = 1729279,5 + 367 * R + Int( Y ) - Int( V ) + D
Q = ( A + 83 ) / 100
C = Int( Q )
W=3*(C+1)/4
E = Int( W )
JD = B + 38 - E
Int( x ) - Odcina część ułamkową z liczby x np. int( 4,87 ) = 4
Obliczanie daty kalendarza Gregoriańskiego z dni Juliańskich
Jd - Dni Juliańskie
W = JD + 0.5 = 2441925
X = INT ( W ) = 2441925
U=W-X=0
Y = INT ( ( X + 32044,5 ) / 36524,25 ) = 67
Z = X + Y - INT ( Y / 4 ) - 38 = 2441938
A = Z + 1524 = 2443462
B = INT ( ( A - 122,1 ) / 365,25 ) = 6689
C = A - INT ( 365,25 * B ) = 305
E = INT ( C / 30,61 ) = 9
F = INT ( E / 14 ) = 0
R = B - 4716 + F = 1973
M = E - 1 - 12 * F = 8
D = C + U - INT ( 153 * E / 5 ) = 30
R - Rok
M - Miesiąc
D - Dzień
Int( x ) - Odcina część ułamkową z liczby x np. int( 4,87 ) = 4
35
zaczerpnięte ze strony: http://pl.efactory.pl/Dni_Juliańskie
99
Załącznik 2
Adres punktu w którym dokonuje się modyfikacji kamerek internetowych
Jarosław AMBROŻY
Pracownia Komputerowa AB
32-400 Myślenice
Ul. Mickiewicza 40
Tel. (12) 274-02-40
100
Załącznik 3
Przykład pliku *.cat
101
Załącznik 4
Przykładowy plik mebs
102
Załącznik 5
Skrypt start.csp
void main(void)
{
//okienko kontrolne - nie na wierzchu
//SetRunningScriptWindow(RSW_NOT_ALWAYS_ON_TOP);
Run("C:\\Program Files\\AstroVideo\\AstroVideo.exe"); // uruchomienie AstroVideo
Pause(5000);
// pauza aby komputer mógł wykonać zadaną czynność (pozostałe mają to samo znaczenie)
SendKeys("{alt}d"); // otworzenie zakładki Driver
SendKeys("{enter}"); // załadowanie sterownika
Pause(2000);
SendKeys("{alt}vv{enter}{enter}");
Pause(4000);
SendKeys("{tab}{tab}{tab}");
Pause(4000);
SendKeys("{left}");
Pause(2000);
ustawienie parametrów w
video source
SendKeys("{enter}");
Pause(2000);
SendKeys("{alt}m{down}{down}{enter}");
SendKeys("{tab}{tab}2000");
SendKeys("{enter}");
włączenie opcji długiej
ekspozycji (enable long
exposure) i ustawienie czasu
ekspzycji (w tym przypadku
2000mS)
Pause(1000);
//SendKeys("{alt}c{enter}{tab}{tab}{tab}{tab}{tab}{tab}{tab}{tab}{tab}{tab}{tab}{tab}{tab}{tab}{space}");
//SendKeys("{enter}");
//Pause(2000);
}
włączenie opcji auto zapisu
103
Załącznik 6
Skrypt foto.csp
void main()
{
While(1)
{
// początek skryptu
// program wykonuje operację do póki użytkownik jej nie przerwie
SendKeys("{alt}c{down}{enter}");
// Zwolnienie “migawki”
Pause(4000);
// przerwa pomiędzy kolejnymi ekspozycjami
}
}
104
Załącznik 7
FITS header z AstroVideo
SIMPLE =
T
BITPIX =
32
NAXIS =
2
NAXIS1 =
320
NAXIS2 =
240
DATE-OBS= '12/11/04'
TIME-OBS= '17:15:38.300'
EXPTIME =
2.860 / exposure time in secs
COMMENT FramesPerImage 1
OBJECT = ''
BYTESWAP=
F / not the INTEL way round
END
105
Załącznik 8
Plik tekstowy otrzymany w wyniku fotometrii za pomocą AIP4WIN
106
Załącznik 9
Schemat procesu redukcji danych
107
Załącznik 10
Propozycja ćwiczenia na pracownię astronomiczną.
TEMAT:
Fotografia przy użyciu kamery internetowej
POJĘCIA:
detektor CCD i zasada jego działania, ciemna klatka (darkframe), flatfield,
format FITS, JPEG, BMP (bitmapa), DIB
atlas nieba, kamera internetowa z celownicą, komputer
Wykonać kilka fotografii ciał niebieskich widocznych na niebie
POMOCE:
ZADANIE:
WSKAZÓWKI: W etapie przygotowań należy zwrócić szczególną uwagę na wycentrowanie
celownicy, aby patrzyła w ten sam punkt na niebie co kamerka. Ponadto ważne jest aby w
trakcie wymiany obiektywu w kamerce, nie zabrudzić chipu lub powierzchni szklanych
obiektywu. Należy również wystrzegać się kurzu i pyłu. Przy wykonywaniu ciemnej klatki
należy szczelnie przykryć obiektyw, aby całkowicie uniemożliwić dopływ światła do
detektora.
Kamera ma możliwość pracy w dwóch trybach. Z boku obudowy widoczny jest przełącznik
za pomocą którego zmienia się tryb pracy kamery. Kamera pracuje w dwóch trybach: bez
wzmocnienia i ze wzmocnieniem. Pierwszy tryb używamy do fotografii planet i Księżyca,
a drugi umożliwia rejestrację obiektów słabszych (mgławice, galaktyki, gromady gwiazd itp.).
PRZEBIEG ĆWICZENIA:
A) Obserwacje jasnych obiektów programem VidCap:
1. Założyć odpowiedni obiektyw i umieścić kamerę na montażu wyposażonym w silnik
prowadzący.
2. Podłączyć kamerę do komputera (kabel USB)
3. Przełączyć kamerę na tryb bez wzmocnienia.
4. Włączyć komputer i uruchomić program VidCap.
5. Ustawić parametry w programie (patrz instrukcja).
6. Skierować kamerę na interesujący nas obiekt i włączyć prowadzenie montażu. Jeżeli
obserwowanym obiektem ma być Słońce NALEŻY KONIECZNIE
ZASTOSOWAĆ FILTRY W CELU OCHRONY WZROKU I SPRZĘTU!!!
7. Wykonać próbne zdjęcia w celu ustawienia ostrości.
8. Zrobić właściwej ekspozycji.
INSTRUKCJA OBSŁUGI W PROGRAMIE VIDCAP:
Po uruchomieniu program automatycznie wykrywa kamerę. W zakładce Options
uruchamiamy opcję Preview. W oknie powinien pojawić się podgląd. W tej samej zakładce
mamy jeszcze dwie ważne opcje: Video Format... oraz Video Source... W pierwszej opcji
ustawiamy sobie rozdzielczość robionych zdjęć. W drugiej w zakładce Image controls w polu
Framerate włączamy wartość 5. W zakładce Camera controls, w polach White balance
i Exposure, włączamy opcję Auto. W ten oto sposób kamera jest gotowa do pracy.
Zdjęcia rejestrujemy za pomocą przycisku Capture (piąty od lewej). Opcja Save Single
Frame... znajduje się w zakładce File. Za pomocą tej opcji zapisujemy zdjęcia w formacie
108
DIB na dysku w miejscu które wskażemy. VidCap ma możliwość rejestrowania filmów
poklatkowych. Film „kręcimy” za pomocą przycisku znajdującego się obok Capture (z
prawej strony). Rejestrujemy klatki, które są łączone i zapisywane jako plik AVI na dysku.
Zapis odbywa się w zakładce File w opcji Save Captured Video As...
B) Obserwacje słabych obiektów programem AstroVideo:
Założyć odpowiedni obiektyw i umieścić kamerę na montażu
wyposażonym w silnik prowadzący.
2.
Podłączyć kamerę do komputera (włączamy kabel USB i kabel
zakończony końcówką jack wyprowadzony z kamery do portu LPT)
3.
Przełączyć kamerę na tryb ze wzmocnieniem.
4.
Włączyć komputer i uruchomić programu AstroVideo.
5.
Załadować sterownik kamery i ustawić parametry w programie
(patrz instrukcja).
6.
Skierować kamerę na interesujący nas obiekt i włączyć
prowadzenie montażu.
7.
Rejestracja próbnych zdjęć w celu ustawienia ostrości i czasu
ekspozycji.
8.
Zarejestrować ciemną klatkę.
9.
Zrobić właściwą ekspozycję.
10.
Przeformatowanie plików FITS na format JPEG lub BMP.
1.
INSTRUKCA OBSŁUGI W PROGRAMIE ASTROVIDEO:
Po uruchomieniu programu należy załadować sterowniki kamery. W tym celu
otwieramy zakładkę Driver w menu i wybieramy pierwszą od góry opcję Microsoft WDM
Image. W tym momencie powinien się w lewym oknie (Input window) pojawić podgląd
obrazu.
W kolejnym kroku Otwieramy zakładkę Capture, a w niej opcję Setup. Wyświetli się
okno AstroCapture Setup. Tutaj należy włączyć opcję Auto save images, oraz wybrać katalog
do którego zapisywane będą zdjęcia (przycisk pod napisem Image directory). Reszta pozostać
powinna bez zmian.
Następnie otworzyć zakładkę Video i opcję Source. W zakładce Image Controls
w polu Framerate ustawiamy wartość 5. W zakładce Camera controls w polu White balance
ustawiamy opcję Outdoor, a w polu Exposure wyłączamy tryb Auto. Następnie należy suwak
w polu Shutter speed przesunąć do pozycji skrajnie lewej, natomiast w polu Gain do pozycji
skrajnie prawej. Po wprowadzeniu ustawień naciskamy przycisk Zamknij.
Na koniec przechodzimy do zakładki Camera i tam włączamy opcję Enable long
exposure control, a następnie włączamy opcje Setup long exposure control. Wyświetli się
okno Camera control port. Tutaj ważny jest tylko jeden parametr. Jest nim okno Exposure
time (mS). W tym oknie zadajemy czas ekspozycji podany w milisekundach (wpisanie
wartości 2000 będzie oznaczało że czas ekspozycji wynosi 2 sekundy). Po zadaniu czasu
ekspozycji przyciskamy OK i w ten sposób mamy przygotowana kamerę do pracy.
Ekspozycję uruchamiamy przyciskiem Capture który znajduje się pod menu programu
(drugi od lewej). Podgląd uruchamiamy przyciskiem Preview znajdującym się obok Capture
(z prawej). Po zakończeniu ekspozycji jej wynik pojawi się w prawym oknie (Output
window).
109
W przypadku fotografii wystarczy na początek zarejestrować 5-10 darkframe’ów.
A następnie przystąpić do właściwej fotografii. Czas ekspozycji przy którym rejestrowaliśmy
darkframe musi być identyczny z czasem ekspozycji właściwych zdjęć.
AstroVideo potrafi automatycznie odejmować prąd ciemny od rejestrowanych
obrazków i wykonywać korektę na flatfield. Robi się to w menu Dark i Flat.
W menu Dark włączamy opcję Use darkframe from file, po czym podajemy pliki FITS
na których zarejestrowana jest ciemna klatka. Następnie włączamy opcję Auto-substract for
saving and display. Program od tego momentu będzie po ekspozycji odejmował darkframe
i zapisywał pliki po odjęciu a w oknie Output window będzie można zobaczyć efekt jego
działania.
Podobnie dzieje się w wypadku flatfield’ów. W zakładce Flat uruchamiamy opcję Use
flat field from file, a następnie włączamy opcję Apply flat field on capture. Spowoduje to, że
program dokona korekty, a efekt będzie widoczny w oknie Output window.
110