Politechnika Łódzka
Wydział Elektrotechniki, Elektroniki,
Informatyki i Automatyki
Instytut Elektroenergetyki
Zespół Trakcji Elektrycznej
Laboratorium Automatyki i Sterowania Ruchem Kolejowym
ĆWICZENIE A4
BADANIE URZĄDZEŃ TWORZĄCYCH
OBWÓD TOROWY SOT - 1
1. Zasada wykrywania obecności pojazdu na torze za pomocą obwodu torowego
Bezpieczne prowadzenie ruchu pociągów na linii kolejowej wymaga oddzielenia
jednego pociągu od drugiego pewną długością toru. Aby zrealizować tę zasadę, trzeba
podzielić tor na odcinki, sprawdzać obecność taboru na każdym z odcinków oraz prowadzić
ruch pociągów tak, żeby na każdym odcinku toru mógł znajdować się tylko jeden pociąg.
Sprawdzanie obecności pojazdu na określonym odcinku toru nazywa się kontrolą stanu
zajętości toru i odbywa się za pośrednictwem obwodów torowych lub liczników osi.
Obwody torowe stanowią nieodłączny element współczesnych automatycznych
systemów sterowania ruchem kolejowym srk. Kontrola stanu zajętości toru za pośrednictwem
obwodu torowego polega na przekształceniu obecności taboru w obrębie wydzielonego
odcinka toru na kryterium elektryczne, które może być wykorzystywane w układach
zależnościowych, nastawczych i informacyjnych srk.
Obwód torowy jest to układ elektryczny utworzony w torze przez dołączenie, do
odcinka szyn o pewnej długości, nadajnika (źródła zasilania) z jednej strony i odbiornika
z drugiej. Odcinek toru, którego stan zajętości jest kontrolowany, nazywa się odcinkiem
izolowanym. Prąd płynący w tokach szynowych od nadajnika do odbiornika nazywa się
prądem sygnałowym, w odróżnieniu od płynącego tymi samymi tokami prądu trakcyjnego.
Działanie obwodu torowego jest oparte na wykorzystaniu:
1. obu szyn toru kolejowego jako odizolowanych od siebie jak i sąsiednich odcinków toru
przewodów, którymi można przesłać od nadajnika do odbiornika prąd sygnałowy;
2. zwierania toków szynowych przez osie zestawów kołowych taboru kolejowego.
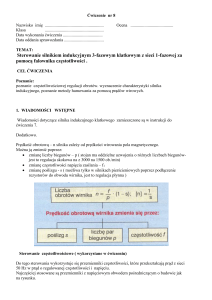
Zasadę działania obwodu torowego ilustruje rys.1.
tor wolny
odbiór
zasilanie
tor zajęty
odbiór
zasilanie
Rys. 1. Obwód torowy (zasada działania)
Jeżeli na kontrolowanym odcinku toru nie ma taboru, prąd sygnałowy dopływa z
nadajnika do odbiornika. Wjazd pojazdu szynowego choćby jedną osią w obręb obwodu
torowego sprawia, że toki szynowe zostaną zwarte (oś bocznikuje obwód) i prąd sygnałowy
nie dopływa do odbiornika. Jeżeli odbiornikiem w obwodzie torowym jest przekaźnik,
uzyskuje się proste kryterium zajętości toru. Przekaźnik wzbudzony oznacza tor wolny,
przekaźnik odwzbudzony oznacza tor zajęty przez tabor. Zasada ta obowiązuje niezależnie od
kierunku jazdy pojazdu trakcyjnego.
Długość odcinka izolowanego, wchodzącego w skład obwodu torowego, ma wpływ na
przepustowość linii kolejowej. Na szlakach kolejowych, przy samoczynnej blokadzie
liniowej, obwody mają długość zwykle 1 2 km. Obwody zastosowane w metrze, ze względu
na konieczność zapewnienia dużej gęstości ruchu, są krótsze. Np. na I linii metra w W-wie
obwody mają od 100 do 300 m długości.
Obwody torowe są znane i stosowane przez kolej od dziesięcioleci, ze względu na ich
prostą budowę i pewność działania. Obwód torowy stanowi tzw. układ bezpieczny. Oznacza
to, że praktycznie żadna usterka nie może spowodować powstania sytuacji niebezpiecznej,
jaką jest zinterpretowanie kontrolowanego odcinka toru faktycznie zajętego przez pojazd,
jako niezajęty. Uszkodzenie urządzeń obwodu, pęknięcie szyny, przerwanie połączeń
doprowadzających itp., powoduje przerwanie dopływu prądu sygnałowego do przekaźnika
i jego odwzbudzenie, co oznacza zajętość kontrolowanego odcinka.
Prawidłowe działanie obwodu wykrywającego obecność osi pojazdu trakcyjnego w jego
obrębie wymaga elektrycznego odseparowania (odizolowania) obwodu od sąsiednich
2
(miejsce oznaczone „T” na rys. 1). T sprawia, że odcinek szyn wchodzący w skład obwodu
nazywa się odcinkiem izolowanym.
Starsze, tzw. klasyczne obwody torowe zasilane są napięciem pochodzącym z linii
energetycznej niskiego napięcia, o wartości obniżonej z 230 V do poziomu kilku-kilkunastu
woltów, 50 Hz. Rolę elementów separujących od siebie sąsiednie obwody pełnią tzw. złącza
izolowane (przekładki izolacyjne i łubki umocowane w stykach szynowych) lub złącza
klejone. Są to, ogólnie mówiąc, elementy izolacyjne montowane w szynach, wymagające
cięcia szyn, co osłabia je mechanicznie. Obwody z tego typu izolacją nazywa się obwodami
złączowymi lub obwodami ze złączami izolowanymi.
Zastosowanie złączy izolowanych narusza ciągłość elektryczną szyn, które stanowią
sieć powrotną dla prądu trakcyjnego, płynącego szynami do podstacji trakcyjnej. Zapewnienie
prawidłowej pracy obwodu torowego przy spełnieniu warunków dla przepływu powrotnego
prądu trakcyjnego wymaga zastosowania dodatkowych elementów – dławików torowych.
W celu przepuszczenia prądu trakcyjnego przy każdym złączu izolowanym umieszcza się
dwa dławiki torowe z połączonymi środkami uzwojeń torowych. Dławik jest elementem
kosztownym, o znacznych gabarytach, wymagającym okresowego dostrajania, uzupełniania
oleju, a więc kłopotliwym w utrzymaniu.
W celu ułatwienia eksploatacji obwodów torowych, separację galwaniczną zastąpiła
separacja elektryczna. W nowszych obwodach torowych, tzw. obwodach bezzłączowych lub
obwodach z separacją elektryczną źródło zasilania stanowią generatory sygnałów
określonych częstotliwościach. Przy zastosowaniu różnych częstotliwości sygnałów w
sąsiednich obwodach i selektywnych układach odbiorczych, obwody pracują niezależnie i nie
zakłócają się wzajemnie. W niektórych rozwiązaniach na końcach obwodów umieszczone są
dodatkowe układy rezonansowe (tzw. złącza elektryczne) stanowiące separację elektryczną.
W bezzłączowych obwodach torowych nie ma potrzeby stosowania dławików torowych, gdyż
obwody te nie naruszają ciągłości mechanicznej i elektrycznej szyn.
Niezależnie od sposobu odizolowania jednego obwodu torowego od drugiego, zasada
działania kontroli zajętości jest taka sama, różna jest postać sygnału zasilającego obwód.
W kolejowych obwodach torowych bezzłączowych, o długościach 12 km, stosuje się
sygnały z zakresu częstotliwości 1000 3000 Hz, w obwodach krótkich (zwłaszcza
zwrotnicowych) - do kilkunastu kiloherców, niemodulowane lub modulowane. Zastosowane
parametry sygnału sprawiają, że obwody z separacją elektryczną są odporniejsze na
zakłócenia od obwodów 50 Hz. Zwykle stosuje się kilka częstotliwości sygnału tak, aby
sąsiednie obwody w danym torze i w torach równoległych pracowały z różnymi
częstotliwościami.
3
2. Bezzłączowe obwody torowe stosowane na liniach polskich kolei
Na liniach i stacjach PKP stosuje się bezzłączowe obwody torowe SOT-1 i SOT-2.
Obwody SOT-1 stosuje się do kontroli zajętości toru na szlaku (odcinku między stacjami),
obwody SOT-2 – do kontroli zajętości toru w obrębie stacji kolejowej (tory stacyjne
i rozjazdy).
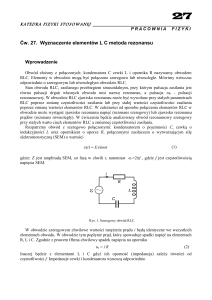
W obwodzie SOT-1 (rys. 2.1) przeznaczonym do kontroli zajętości długich odcinków
toru nadajnik N umieszczony pośrodku obwodu wysyła do odbiorników 01 i 02 znajdujących
się na końcach obwodu, sygnał o określonej częstotliwości nośnej modulowanej amplitudowo
napięciem o częstotliwości 50 Hz i odpowiedniej fazie. Sygnał modulujący 50 Hz uzyskuje
się z napięcia zasilającego nadajnik. Jest to napięcie określonej fazy sieci 3* 230 V. Odbiór
sygnału odbywa się przez przekładnik torowy P przymocowany do szyny i sprzężony z nią
elektrycznie. Prąd sygnałowy płynący szyną indukuje w przekładniku napięcie sterujące
odbiornikiem O. W selektywnym układzie wejściowym odbiornika, dostrojonym do
częstotliwości nośnej danego obwodu, następuje demodulacja sygnału odebranego z szyn,
w wyniku której odtworzony jest sygnał o częstotliwości 50 Hz. Napięcie na wyjściu
odbiornika wzbudza fazoczuły przekaźnik torowy.
~5m
~5m
P
P
01
N
02
Rys.2.1 Bezzłączowy obwód torowy SOT-1
Obwód SOT-1 działa według tej samej zasady, co klasyczny obwód torowy 50 Hz ze
złączami izolowanymi. Jeżeli tor jest wolny, przekaźnik jest wzbudzony. Oś taboru
bocznikuje obwód powodując zwolnienie przekaźnika. W obwodach SOT-1 nadajnik
umieszczony jest pośrodku, dlatego obwody te są dłuższe od obwodów klasycznych. Ich
długość wynosi zwykle od 1,5 do 2 km. Dla określenia stanu zajętości obwodu kontroluje się
stan wzbudzenia obu przekaźników. Wzbudzenie obu przekaźników torowych stanowi
kryterium niezajętości obwodu, odwzbudzenie choć jednego z przekaźników stanowi
kryterium zajętości.
Podstawowym parametrem wyróżniającym sygnały sąsiadujących obwodów jest
częstotliwość nośna. Dodatkowym parametrem jest faza sygnału modulującego 50 Hz.
4
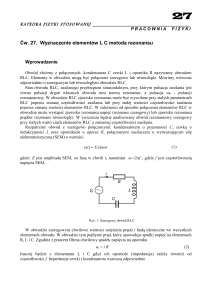
W obwodach SOT-1 stosuje się pięć wartości częstotliwości sygnału f1f5, co przy
zróżnicowaniu faz sygnału modulującego pozwala na zastosowanie sześciu różnych
konfiguracji obwodów na linii jedno lub wielotorowej. Zasadę tę ilustruje rys. 2.2.
Odpowiednia sekwencja częstotliwości zasilających sąsiednie obwody torowe w tym samym
jak i w sąsiednim torze, ogranicza zakłócające oddziaływanie obwodów na siebie. Obwody
pracujące z jednakową częstotliwością znajdują się w tak dużej odległości od siebie, że ich
prądy są wytłumione i nie oddziaływują na siebie.
f5
faza SR
f2
faza TR
f4
faza TS
f1
faza RS
f3
faza RT
tor 1
f1
faza RS
f3
faza RT
f5
faza ST
f2
faza SR
f4
faza TR
tor 2
Rys.2.2 Zróżnicowanie częstotliwości zasilających sąsiednie obwody SOT
Wysoka odporność obwodu torowego SOT-1 na zakłócenia wynika nie tylko ze
zróżnicowania częstotliwości sygnału nośnego w sąsiednich obwodach, ale również ze
zróżnicowania faz napięcia 50 Hz przypisanych poszczególnym obwodom. Indukcyjny
przekaźnik
torowy
JRV
stosowany
w
obwodach
SOT-1
jest
przekaźnikiem
dwuuzwojeniowym, w którym jedno z uzwojeń – tzw. lokalne – zasilane jest napięciem
230 V z sieci zasilającej niskiego napięcia, drugie – tzw. uzwojenie torowe – napięciem
wyjściowym odbiornika. Dla wzbudzenia przekaźnika napięcia zasilające oba uzwojenia
powinny być przesunięte w fazie, a kąt fazowy pomiędzy nimi zawarty w przedziale
60° 120°. Ważny jest zatem dobór faz napięć 230 V, jakimi zasila się poszczególne
urządzenia tworzące obwód SOT-1. Faza napięcia 230 V dobrana dla danego obwodu (rys.
2.2) dotyczy napięcia zasilania nadajnika i przekaźnika torowego JRV. Zasadą jest, że fazy
zasilające nadajnik i uzwojenie lokalne przekaźnika torowego powinny być takie same. Faza
zasilania dla odbiornika jest obojętna.
Wartości częstotliwości sygnałów w obwodach SOT-1 są następujące: 1580, 1860,
2170, 2470, 2800 Hz.
Zastosowane na końcach obwodu układy rezonansowe LC są dostrojone do
częstotliwości pośredniej między częstotliwościami nośnymi sąsiadujących obwodów i służą
do podwyższenia wartości prądu na końcu obwodu. Układ LC nie stanowi w tym przypadku
separacji elektrycznej. Elementy LC to łącznik międzyszynowy o niewielkiej rezystancji
5
i kondensator umieszczony w obudowie urządzeń przytorowych. Zwarcie toków szynowych
przez indukcyjność L zapewnia wyrównanie asymetrii powrotnego prądu trakcyjnego.
Bezpieczeństwo w obwodach torowych SOT-1 jest zapewnione przez:
-
odbiornik reagujący na amplitudę modulowanej częstotliwości nośnej i odtwarzający
przebieg modulujący;
-
przekaźnik fazoczuły (pierwszej klasy) reagujący na fazę i amplitudę sygnału
modulującego.
Zespoły elektroniczne (nadajniki i odbiorniki) wchodzące w skład SOT-1 zostały tak
zaprojektowane i wykonane, aby w przypadku uszkodzenia:
-
w nadajniku nie wzrosła moc sygnału wyjściowego lub też nadajnik nie zaczął
generować sygnału o częstotliwości innego kanału;
-
w odbiorniku nie wzrosła jego czułość lub też nie przestroił się na częstotliwość
innego kanału.
Obwód torowy SOT-2 przeznaczony jest do kontroli zajętości toru w obrębie stacji
kolejowej. Stosuje się dwa rodzaje obwodów: SOT-21 i SOT-22.
Obwód SOT-21 to obwód niskiej częstotliwości, przeznaczony do kontroli długich
(2001200m) międzyzwrotnicowych odcinków torów lub odcinków torów między
semaforem wjazdowym a zwrotnicami (tzw. obwód przedzwrotnicowy). Obwód SOT-22 to
obwód wysokiej częstotliwości, przeznaczony do kontroli rozjazdów oraz krótkich (do 200m)
odcinków torów przedzwrotnicowych i zwrotnicowych.
a)
SOT - 21
P
P
01
N
02
SOT - 22
b)
01
N
02
Rys.2.3 Bezzłączowe obwody torowe SOT-2
6
Obwód torowy SOT-21 pracuje przy tych samych parametrach sygnału jak obwód SOT1 (częstotliwości nośne i modulacja sygnału napięciem 50 Hz). Do utworzenia obwodu
wykorzystuje się te same zespoły nadajnika i odbiornika, jak dla SOT-1, z tą różnicą, że
granice obwodu nie są wyznaczone przez układy rezonansowe LC. Zwarcia toków
szynowych na końcach obwodów dla stacyjnych torów przyjazdowych i odjazdowych oraz w
obwodach międzyzwrotnicowych w naturalny sposób tworzą ograniczające te tory zwrotnice
(iglice i krzyżownice rozjazdu). Od strony szlaku zwarcie galwaniczne w obwodach SOT-21
tworzy się za pomocą zwory lub łącznika międzytokowego. Jak w SOT-1, nadajnik N
umieszczony w środku obwodu wytwarza sygnał prądowy zasilający obie części obwodu.
Obwód kontroluje odcinek toru od odbiornika O1 do odbiornika O2. Obwód jest zajęty, jeżeli
co najmniej jeden przekaźnik sterowany przez odbiornik jest niewzbudzony.Rys.2.3a
przedstawia przykład zastosowania obwodu SOT-21 jako obwodu międzyzwrotnicowego.
W obwodzie torowym SOT-22 niemodulowany sygnał nadajnika jest przekazywany
bezpośrednio na wejście włączonego napięciowo do toru odbiornika. Napięcie wyjściowe
z odbiornika zasila neutralny przekaźnik torowy. W przypadku kontroli zajętości zwrotnic w
głowicy, jeden nadajnik współpracuje z kilkoma odbiornikami.
W obwodach SOT-22 stosuje się następujące częstotliwości sygnału: 7000, 8000,
10000, 12150, 14600, 16800 Hz.
Rys.2.3b
przedstawia
przykład zastosowania obwodu SOT-22
jako obwodu
zwrotnicowego. Nadajnik N wytwarza prąd przepływający przez obie iglice i krzyżownicę
zwrotnicy. Spadki napięć między iglicami a krzyżownicą stanowią źródła prądowe zasilające
odcinki toru poza krzyżownicą. Sygnały te sterują odbiornikami O1 i O2.
3. Dane techniczne urządzeń nadawczych i odbiorczych SOT-1
MER-111710
Zespół elektroniczny MER-111710 jest nadajnikiem sygnału niskiej częstotliwości
modulowanego częstotliwością sieci zasilającej (50 Hz). Jest stosowany w bezzłączowych
obwodach liniowych SOT-1 i stacyjnych SOT-21. Odmiany wykonań zespołu są tworzone w
zależności od sygnału nośnego oraz mocy wyjściowej.
-
Częstotliwość nośna:
MER-111710/1 oraz /1A
(niebieska płyta czołowa)
1580 Hz
MER-111710/2 oraz /2A
(żółta płyta czołowa)
1860 Hz
MER-111710/3 oraz /3A
(czerwona płyta czołowa)
2170 Hz
MER-111710/4 oraz /4A
(zielona płyta czołowa)
2470 Hz
7
MER-111710/5 oraz /5A
(aluminiowa płyta czołowa) 2800 Hz
-
Częstotliwość kluczująca
- 50 Hz (częstotliwość napięcia zasilającego);
-
Napięcie zasilania 10,5 24 V, 50 Hz;
-
Pobór prądu – max 0,35 A dla odmiany bez końcówki „A”;
– max 0,70 A dla odmiany z końcówką „A”;
-
Wartość średnia napięcia wyjściowego kluczowanego przy napięciu zasilania Uz=24 V
i obciążeniu R0=4 i L0=8H:
-
2,1 2,65 V dla odmiany bez końcówki „A”,
-
4,05 4,55 V dla odmiany z końcówką „A”.
Układ zacisków nadajnika przedstawia rys. 3.1.
4
Zasilanie
10,5 24 V
50 Hz
3
2
MER
111710
Wyjście
(sygnał modulowany
sygnałem zasilającym 50 Hz)
1
Rys. 3.1. Układ zacisków nadajnika SOT
Układ rezonansowy
Układ rezonansowy usytuowany na obu końcach obwodu SOT-1 rys. 3.2, stanowi
kondensator C oraz łącznik międzytokowy.
P
Dł
P
min 0,5 m
2,5 m
5 ± 0,3 m
C
2 odbiorniki
Rys. 3.2. Rozmieszczenie urządzeń na styku dwóch obwodów
8
Łącznik międzytokowy jest dławikiem umieszczonym w obudowie z tworzywa
sztucznego. Dławik wraz z linkami łączącymi do toru ma impedancję około 0,7 dla
f = 2100 Hz.
Kondensator C ma wartość dobraną do częstotliwości sąsiednich obwodów:
1860/2800 Hz
85,5 F,
1580/2800 Hz
86,9 F,
1860/2470 Hz
105,4 F,
1580/2470 Hz
110,6 F,
2170/2800 Hz
82,0 F,
1580/2170 Hz
141,4 F.
Przekładnik szynowy
W obrębie układu rezonansowego umieszczone są dwa przekładniki szynowe P. Każdy
z nich stanowi element sąsiadujących ze sobą obwodów SOT-1.
Przekładnik przeznaczony jest do odbioru sygnału prądowego z szyny i stanowi element
sprzęgający indukcyjnie odbiornik obwodu SOT z torem. Impedancja przekładnika
dopasowana jest do impedancji wejściowej odbiornika, indukcyjność jego wynosi 38 mH.
MER - 111404
Zespół elektroniczny MER- 111404 jest odbiornikiem sygnałów w obwodach torowych
SOT-1 oraz stacyjnych SOT-21. Odmiany wykonań zależą od częstotliwości pracy
urządzenia oraz od obciążenia.
-
Częstotliwość znamionowa:
MER-111404/1 oraz /1A
(niebieska płyta czołowa)
- 1580 Hz,
MER-111710/2 oraz /2A
(żółta płyta czołowa)
- 1860 Hz
MER-111710/3 oraz /3A
(czerwona płyta czołowa)
- 2170 Hz
MER-111710/4 oraz /4A
(zielona płyta czołowa)
- 2470 Hz
MER-111710/5 oraz /5A
(aluminiowa płyta czołowa) - 2800 Hz
-
Napięcie zasilania 10,0 13,5 V, 50 Hz
-
Pobór prądu – max 0,28 A, przy napięciu zasilania 12 V,
-
Napięcie wyjściowe (napięcie na przekaźniku torowym JRV), przy napięciu zasilania
12 V:
10,0 V dla odmiany bez końcówki „A”,
4,5 V dla odmiany z końcówką „A”.
9
-
Czułość odbiornika – wyrażona przez wartość prądu sygnałowego w szynie, przy
której przekaźnik przechodzi w stan czynny – (100 ± 8) mA dla wszystkich odmian.
-
Obciążenie – przekaźnik indukcyjny JRV-10208
-
Napięcie wyjściowe odbiornika – 9 15 V.
Układ zacisków odbiornika przedstawia rys. 3.3.
Zasilanie
10,5 24 V
50 Hz
3
2
Wejście
(z przekładnika)
4
MER
111404
1
6
Wyjście
(sygnał 50 Hz)
5
Rys. 3.3. Układ zacisków odbiornika SOT
Przekaźnik JRV
Indukcyjny przekaźnik JRV jest przekaźnikiem zaliczanym do I klasy bezpieczeństwa.
Takim przekaźnikom stawia się najwyższe wymagania dotyczące niezawodności pracy ze
względu na ich rolę w funkcjonowaniu urządzeń sterowania ruchem. Przekaźniki I klasy
stosuje się w obwodach, w których nieprawidłowa ich praca może stworzyć sytuację
niebezpieczną w ruchu pojazdów kolejowych. Konstrukcja przekaźników I klasy musi
zapewniać powrót do stanu odwzbudzonego wyłącznie pod wpływem ciężaru kotwicy
przekaźnika. Oznacza to otwarcie wszystkich zestyków zwiernych (czynnych) po przerwaniu
obwodu zasilającego cewkę przekaźnika. Przy takiej konstrukcji przekaźnik charakteryzuje
odpowiednia niezawodność funkcjonalna, która spełnia warunki bezpieczeństwa bez
dodatkowej kontroli w obwodach zależnościowych.
Przekaźnik JRV jest dwustanowym, dwuuzwojeniowym, fazoczułym przekaźnikiem
indukcyjnym. Jego obwód magnetyczny składa się z dwóch obwodów: lokalnego i torowego.
Obwód lokalny wykonany jest z dwóch elektromagnesów w kształcie litery C, oddzielonych
szczeliną, w której obraca się tarcza aluminiowa. Tarcza pełni funkcję kotwicy. Uzwojenie
lokalne jest zasilane napięciem 230 V 50 Hz. Elektromagnes torowy (kontrolny) jest tak
usytuowany, że obejmuje część powierzchni ruchomej tarczy. Uzwojenie torowe (kontrolne)
zasilane jest napięciem 10 V 50 Hz.
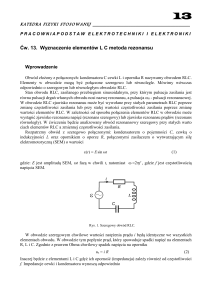
Na rys.3.4a pokazano elementy obwodu magnetycznego przekaźnika indukcyjnego
JRV, a na rys. 3.4b schemat połączeń uzwojeń przekaźnika. Oba obwody magnetyczne są
umieszczone prostopadle względem siebie. Gdy w obu uzwojeniach płynie prąd przemienny,
10
pod wpływem wypadkowego momentu obrotowego tarcza aluminiowa obraca się o pewien
kąt, zamykając zestyki zwierne i otwierając rozwierne.
a)
b)
Rys. 3.4. Przekaźnik JRV a) elementy przekaźnika b) schemat połączeń uzwojeń
Wypadkowy moment napędowy przekaźnika określony jest wzorem:
M c f 1m 2 m sin c I L I K sin
gdzie: c – stała zależna od konstrukcji przekaźnika,
f – częstotliwość prądu zasilającego,
Φ1m, Φ2m – amplitudy strumieni magnetycznych,
φ – kąt miedzy wektorami strumieni magnetycznych,
IL, IK - prądy w uzwojeniach lokalnym, torowym.
Tarcza obraca się dookoła osi prostopadłej do jej płaszczyzny pod wpływem
przenikających ją dwóch pól magnetycznych przesuniętych względem siebie w fazie. Każde
pole wytwarza w tarczy prądy wirowe, które są poddane działaniom drugiego pola, wskutek
czego siła wypadkowa porusza tarczę. Moment obrotowy przekaźnika zależy od natężenia
prądu przepływającego przez oba uzwojenia (wartości obu strumieni) oraz od sinusa kąta
przesunięcia fazowego między tymi prądami. Przekaźnik JRV ma zatem cechę fazoczułości.
Największy moment wystąpi przy kącie φ = 900. Gdy prądy (napięcia) uzwojenia torowego i
lokalnego będą w fazie, tarcza nie obróci się - przekaźnik nie wzbudzi się. Dla prawidłowej
pracy przekaźnika kąt fazowy między napięciem kontrolnym a lokalnym powinien wynosić
600 1200.
11
4. Model toru kolejowego
Tor kolejowy, w którym szyny są zasilane sygnałem elektrycznym, stanowi z punktu
widzenia elektrotechniki tzw. obwód o parametrach rozłożonych. Oznacza to, że składa się z
nieskończonej liczby elementarnych czwórników (rys. 4) połączonych szeregowo, w których
występują parametry podłużne: rezystancja R i indukcyjność L szyn oraz parametry
poprzeczne: konduktancja G i pojemność C między szynami.
R
L
G
C
Rys. 4. Elementarny czwórnik toru kolejowego
Każdy obwód o parametrach rozłożonych charakteryzowany jest przez jednostkowe
parametry elektryczne R, L, G, C, odniesione do jednostki długości obwodu.
Parametry jednostkowe podłużne toru kolejowego zależą od częstotliwości prądu
sygnałowego oraz od parametrów elektrycznych i magnetycznych szyn (oporność właściwa i
przenikalność magnetyczna). Rezystancję jednostkową R i indukcyjność jednostkową L dla
elementarnego czwórnika (rys. 4) określają wzory empiryczne, które dla średniej temperatury
+10ºC oraz względnej przenikalności magnetycznej szyny w=500 (co odpowiada składowej
stałej prądu w szynie 600 A) mają postać:
R 0,0508 0,0818 f [ / km]
L 1,4 7,84
1
[mH / km]
f
gdzie f[Hz] jest częstotliwością prądu płynącego szynami.
Konduktancja jednostkowa G nie zależy od częstotliwości prądu sygnałowego, lecz
wyłącznie od warunków atmosferycznych i stanu technicznego toru (rodzaj i stan podkładów
oraz podsypki). Dla linii kolejowych w polskich warunkach przyjmuje się przedział
zmienności G od 0,01 do 1 S/km. Pojemność jednostkowa C wynosi 10 80 nF/km.
W modelu laboratoryjnym, dla przypadku gdy obwód torowy stanowi obciążenie
nadajnika, wystarczy zastąpić go pojedynczym czwórnikiem o układzie jak na rys. 4,
z parametrami skupionymi R, L, G, i C o wartościach wyznaczonych na podstawie
12
parametrów jednostkowych dla przyjętej długości obwodu i częstotliwości prądu
sygnałowego.
5. Badanie urządzeń obwodu torowego SOT-1
Badaniom podlegają urządzenia nadawczo-odbiorcze pracujące przy częstotliwości
2470 Hz:
nadajnik MER-111710/4 (zielony kolor płyty czołowej);
przekładnik szynowy;
odbiornik MER-111404/4 (zielony kolor płyty czołowej).
5.1.
Badanie nadajnika
Zmontować układ przedstawiony na rys. 5.1.
In
~230 V
4
Uz
2
MER
111710
V
3
R
L
A
Un V
G
C
1
Rys. 5.1. Układ pomiarowy nadajnika obwodu SOT-1
Napięcie zasilania nadajnika wynosi: 10,5 24,0 V, 50 Hz. Aby uzyskać możliwość
płynnej regulacji napięcia zasilania, nadajnik przyłączony jest do sieci poprzez
autotransformator i dwa transformatory 230V/12V, których uzwojenia wtórne połączone
szeregowo. Obciążenie nadajnika stanowi czwórnik zmontowany z dekad pomiarowych R, L,
C, zastępujący odcinek toru kolejowego o założonej długości i parametrach elektrycznych.
Badania nadajnika składają się z dwóch części:
a. pomiary prądu i napięcia wyjściowego w funkcji napięcia zasilania i obciążenia;
b. ocena wpływu napięcia zasilania oraz obciążenia nadajnika na modulację 50Hz
sygnału wyjściowego.
Dla wykonania badań w zakresie punktu „a.” należy ustawić odpowiednie wartości
elementów czwórnika zastępującego 1km toru kolejowego. Przyjąć stałe wartości parametrów
podłużnych szyn: rezystancji R i indukcyjności L oraz poprzecznej pojemności C. Wartości te
należy określić dla częstotliwości sygnału generowanego w nadajniku i zaokrąglić. W czasie
pomiarów parametry te nie będą zmieniane. Regulacji podlegać będzie konduktancja między
13
szynami G, która w zależności od warunków atmosferycznych może zmieniać się
w przedziale od 0,01S/km do 1S/km. Odpowiada to zmienności rezystancji między szynami
od 100 do 1.
Dla założonej wartości napięcia zasilania nadajnika Uz mierzyć napięcie wyjściowe Un
oraz prąd wyjściowy nadajnika In w funkcji konduktancji między szynami. Pomiary wykonać
dla następujących wartości Uz: 8, 12, 16, 20, 24 V. Wyniki notować w tabeli 1.
Tabela 1
R=......;
L=......mH;
C=......nF
Uz=........V;
G
S/km
0,01
0,02
0,05
0,10
0,20
0,50
1,0
R=1/G
100
50
20
10
5
2
1
Un
V
In
mA
Dla wykonania badań w zakresie punktu „b.” należy ustawić napięcie zasilania U z=24V
oraz rezystancję między szynami odpowiadającą G=0,01S/km. Włączyć oscyloskop
równolegle do woltomierza Un i obejrzeć kształt napięcia wyjściowego nadajnika – przebieg
sinusoidalny o częstotliwości 2470Hz modulowany amplitudowo napięciem o częstotliwości
50Hz. Ocenić wpływ zmniejszania napięcia zasilania na kształt napięcia wyjściowego
nadajnika.
Następnie, ustawić napięcie Uz=24V i włączyć je na drugi kanał wejściowy
oscyloskopu. Sprawdzić czy istnieje przesunięcie czasowe między przebiegiem Uz
a sygnałem modulującym w przebiegu wyjściowym z nadajnika. Ocenić wpływ zmienności
obciążenia nadajnika (konduktancja G, rezystancja R) na modulację 50Hz.
5.2.
Badanie przekładnika szynowego
Do odcinka szyny kolejowej z przymocowanym przekładnikiem dołączyć układ
pomiarowy przedstawiony na rys. 5.2. Przekładnik obciążyć rezystancją 300 . Należy
uważać, aby przewody doprowadzające były ułożone prostopadle do szyny i nie powodowały
odkształcenia pola magnetycznego wytwarzanego wokół szyny przez prąd nią płynący.
14
R
G
A
przekładnik
szyna
V
300
Rys. 5.2. Układ pomiarowy przekładnika szynowego obwodu SOT
G – generator napięcia sinusoidalnego o regulowanej częstotliwości,
R – rezystancja dekadowa.
Celem pomiarów jest określenie wpływu wartości i częstotliwości prądu w szynie na
napięcie wyjściowe przekładnika.
Włączyć generator i ustawić częstotliwość 2500 Hz. Regulując rezystancję R
i amplitudę prądu z generatora ustawić prąd w szynie Isz=1A. Odczytać wartość napięcia U2
na wyjściu przekładnika obciążonego rezystancją 300 . Stosunek Isz/U2 stanowi przekładnię
przekładnika przy tym obciążeniu. Regulując częstotliwość prądu w szynie w zakresie
1000 5000 Hz sprawdzić jej wpływ na wartość przekładni przekładnika. W tym celu
odczytywać wartości napięcia na wyjściu przekładnika utrzymując stałą wartość prądu
w szynie Isz = 1A.
Ustawić częstotliwość pracy przekładnika (np. 2500 Hz) i regulując wartość prądu
w szynie, mierzyć napięcie wyjściowe przekładnika. Wyniki notować w tabeli 2.
Tabela 2
Obciążenie przekładnika R = 300
Isz
mA
U2
mV
Isz/U2
A/V
Te same pomiary powtórzyć przy innej częstotliwości.
Odpowiedzieć na pytanie: jaki jest wpływ częstotliwości i wartości prądu w szynie na
przekładnię przekładnika szynowego SOT.
15
5.3.
Badanie odbiornika SOT
Sprawdzić, czy do uzyskania napięcia wyjściowego na odbiorniku, zasilający go sygnał
musi być modulowany przebiegiem 50 Hz. W tym celu, w układzie jak na rys. 5.2, zamiast
rezystancją 300 , obciążyć przekładnik odbiornikiem SOT (urządzenie MER-111404).
Odbiornik zasilić przez transformator 230/12V. Włączyć generator zasilający odcinek szyny z
przekładnikiem (rys. 5.2), ustawić częstotliwość f = 2470 Hz oraz prąd w szynie Isz = 1A.
Sprawdzić woltomierzem oraz oscyloskopem, czy na wyjściu odbiornika jest napięcie.
Zasilić układ szyna – przekładnik przebiegiem z modulacją 50 Hz. W tym celu, zamiast
generatora, włączyć nadajnik MER-111710, zgodnie z rys. 5.3. Wyjście odbiornika obciążyć
rezystancją 300 .
R
230 V
4
Uz
A
2
MER
111710
V
przekładnik
3
1
szyna
2
6
MER
111404
1
3
4
300
V
5
230 V
Rys. 5.3. Układ pomiarowy odbiornika SOT
Mierząc woltomierzem napięcie Uwy na wyjściu odbiornika przy regulacji prądu
w szynie Isz, zdjąć charakterystykę Uwy = f(Isz) przy dwóch wartościach napięcia zasilającego
nadajnik 8V i 24V.
Wyniki pomiarów notować w tabeli 3.
Tabela 3
Uz = 8V
Isz
mA
Uwy
V
Uz = 24V
16
Isz
mA
Uwy
V
Wykorzystując oscyloskop dwukanałowy obejrzeć równocześnie następujące przebiegi:
napięcie na wejściu odbiornika (sygnał 2740 Hz modulowany przebiegiem
sinusoidalnym 50 Hz) i napięcie na wyjściu odbiornika (przebieg sygnału 50 Hz po
demodulacji);
napięcie na wejściu nadajnika (przebieg sinusoidalny 50 Hz) oraz napięcie wyjściowe
odbiornika (przebieg sinusoidalny 50 Hz);
ocenić, czy jest przesunięcie fazowe między tymi napięciami.
6. Uwagi i wnioski
W sprawozdaniu zamieścić wszystkie obserwacje, wyniki pomiarów, tabele i wykresy.
Wyniki skomentować i sformułować wnioski.
17