Wojskowa AKADEMIA TECHNICZNA
im. Jarosława Dąbrowskiego
Badanie dynamicznych charakterystyk
aparatury komutacyjnej
Podstawy Automatyki i Automatyzacji Ćwiczenia Laboratoryjne
ppłk dr inż. Mariusz WAŻNY
Warszawa 2013
1
BADANIE DYNAMICZNYCH CHARAKTERYSTYK APARATURY KOMUTACYJNEJ
1.1.
WIADOMOŚCI OGÓLNE
Aparatura komutacyjna służy do sterowania obwodami elektrycznymi. Sterowanie to polega na
zamykaniu, otwieraniu i przełączaniu obwodów elektrycznych. Można wyróżnić trzy główne grupy
aparatury komutacyjnej:
1. Aparaturę sterowaną manualnie (ręcznie): wyłączniki, przełączniki i przyciski.
2. Aparaturę sterowaną elektromagnetycznie: przekaźniki i styczniki.
3. Aparaturę sterowaną elementami mechanicznymi (podwoziem, klapami podskrzydłowymi itp.):
mikrowyłączniki i wyłączniki krańcowe.
Cechą charakterystyczną aparatury sterowanej elektromagnetycznie jest posiadanie dwóch
podstawowych zespołów:
– elektromagnesu (stanowiącego zespół napędowy); oraz
– układu zestyków (stanowiących zespół wykonawczy).
Elektromagnetyczne urządzenia komutacyjne przystosowane do sterowania prądami do 20[A],
przyjęto nazywać przekaźnikami, zaś urządzenia komutacyjne przystosowane do sterowania prądami
powyżej 20[A], przyjęto nazywać stycznikami.
1.1.1. Przekaźnik ze zworą uchylną
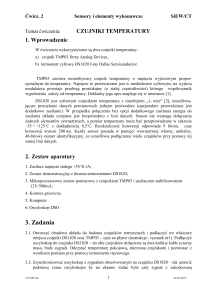
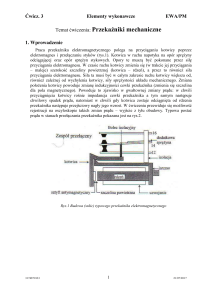
Na rysunku 1.1 przedstawiono podstawowe elementy przekaźnika. W celu wyjaśnienia działania
przekaźnika należy prześledzić siły działające na zworę:
– siłę przyciągania zwory Fe, to jest siłę nośną elektromagnesu;
– siłę sprężyny powrotnej Fsp odciągającą zworę od rdzenia;
– siłę sprężyny stykowej (zderzakowej) Fss, także odciągającą zworę od rdzenia.
7
0
6
5
NZ
NR
3
+ Ue
- Ue
4
Ie
Le
1
2
Oznaczenia:
1 - rdzeń elektromagnesu;
2 - jarzmo;
3 - sprężyna powrotna;
4 - zwora;
5 - izolacja;
6 - sprężyna stykowa (zderzakowa);
7 - styk ruchomy;
8 - szczelina powietrzna;
NZ - styk normalnie zwarty;
NR- styk normalnie rozwarty;
Ie - prąd elektromagnesu;
Ue - napięcie zasilania elektromagnesu.
Rys 1.1. Uproszczony rysunek przekaźnika ze zworą uchylną
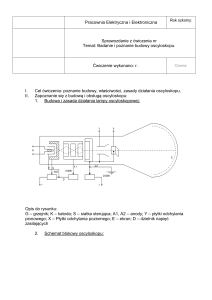
Działanie przekaźnika w ujęciu statycznym
Na rysunku 1.2 przedstawiono charakterystyki statyczne przekaźnika.
Siły te należy rozpatrywać, jako siły sprowadzone do jednej osi działania. Występujące siły zależą
od szczeliny . Aby nastąpił ruch zwory, siła przyciągania zwory, dla każdej wartości szczeliny , musi
być większa od sił odciągających zworę. Po przyłożeniu napięcia Ue do zacisków cewki
elektromagnesu płynie prąd, pod wpływem którego wytwarzany jest strumień magnetyczny
powodujący powstanie siły przyciągającej zworę Fe()-1. Wartość tej siły jest większa od siły sprężyny
powrotnej Fsp(), co wprawia zworę w ruch.
Fm , Fe
Fe()- 1
Fsp+ss()
Fss()
Fsp()
Fe()- 2
MIN
ZS
MAX
Oznaczenia:
Fm
- siła mechaniczna;
Fe
- siła elektromechaniczna;
- szczelina powietrzna;
ZS
- szczelina powietrzna w momencie
zwierania styków;
FSP() - charakterystyka mechaniczna sprężyny
powrotnej;
FSS() - charakterystyka mechaniczna sprężyny
stykowej;
FSP+SS()- sumaryczna charakterystyka mechaniczna
obu sprężyn;
Fe()-1 - charakterystyka elektromechaniczna
(dla prądu zadziałania);
Fe()-2 - charakterystyka elektromechaniczna
(dla prądu zwalniania).
Rys. 1.2. Przykładowe charakterystyki statyczne przekaźnika
2
Na skutek tego ruchu szczelina maleje. Po osiągnięciu przez szczelinę wartości zs następuje
zwarcie styków przekaźnika. Od tego momentu, do siły sprężyny powrotnej Fsp(), dodaje się siła
sprężyny stykowej Fss(). Zwora nadal jest przyciągana, aż do osiągnięcia szczeliny minimalnej MIN.
Rozwarcie styków przekaźnika następuje w sytuacji, gdy napięcie zasilania spadnie do wartości
przy której siła przyciągania elektromagnesu będzie mniejsza od sił odciągających zworę Fe()–2.
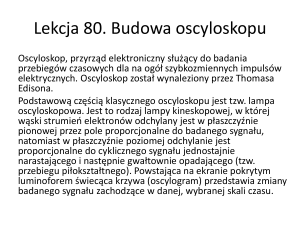
Układ zasilania cewek stycznika i przekaźnika
W przypadku zasilania cewek stycznika lub przekaźnika poprzez styki wyłącznika, w czasie
włączania wyłącznika, następuje odbijanie jego styków. W związku z tym przebieg prądu cewki jest
„przerywany”. W tym celu, dla uzyskania lepszych walorów dydaktycznych, wykonano układ zasilania
cewek, który umożliwia podanie na jej zaciski napięcia narastającego skokowo. Schemat układu
przedstawia rysunek 1.3.
Uzas
Uzas
S
Uład
formowania
napięcia
0
1
S - wyłącznik.
K - stycznik lub przekaźnik.
V - dioda rozładowcza.
V
K
Rys. 1.3. Schemat układu zasilania cewek stycznika lub przekaźnika
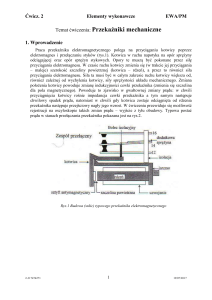
Działanie przekaźnika w ujęciu dynamicznym
Analiza charakterystyk dynamicznych przekaźnika oparto na zarejestrowanych zmianach prądu
cewki przekaźnika przy skokowym przyłączeniu i odłączeniu napięcia od jej zacisków.
Skokowe podanie napięcia na cewkę przekaźnika
Przebieg prądu cewki przekaźnika przy skokowym podaniu napięcia na jej zaciski, przedstawiono
na rysunku 1.4.
Ue
t
t0
Ie
Zwarcie styków
Styki
rozwarte
Ruch zwory
Ieust
Styki zwarte
truszania
t
t0
t1 t3
t2
Rys. 1.4. Przebieg prądu cewki przekaźnika przy skokowym podaniu napięcia na jej zaciski
Cewka przekaźnika posiada określoną indukcyjność Le. Indukcyjność ta zmienia się, gdy
następuje zmiana szczeliny , gdyż wraz ze zmianą szczeliny, następuje zmiana przenikalności
magnetycznej .
Zmiana indukcyjności pociąga za sobą zmianę reaktancji indukcyjnej XL, a tym samym impedancji
uzwojenia cewki Ze. Przy skokowym podaniu na uzwojenie cewki napięcia Ue w chwili t0, zaczyna
narastać prąd, a tym samym siła przyciągania zwory przekaźnika. W chwili t1 następuje ruch zwory.
W czasie t2 następuje zwarcie styków przekaźnika i po krótkim czasie położenie zwory ustala się przy
MIN. W przedziale czasu od t1 do t3 prąd maleje, gdyż rośnie impedancja cewki oraz w uzwojeniach
cewki indukuje się napięcie Ui, które jest skierowane przeciwnie do napięcia zasilania.
3
Wartość i zwrot napięcia indukowanego Ui zależy od ilości zwojów cewki z oraz wartości i znaku
pochodnej d/dt. W przypadku, gdy następuje malenie szczeliny, wartość strumienia rośnie
a pochodna d/dt posiada znak dodatni.
d
Ue z
d
Ue Ui
dt .
, Ie t
Ui z
Z e t
Z e t
dt
Po ustaniu ruchu zwory, od chwili t3 następuje ponowny wzrost prądu elektromagnesu, aż do jego
ustalenia.
Odłączenie napięcia od cewki przekaźnika
Jeżeli cewka przekaźnika jest zasilana poprzez styki wyłącznika, to w chwili jego wyłączenia, na
zaciskach cewki występują duże przepięcia. Aby zaobserwować poszczególne fazy pracy
przekaźnika, równolegle do jego cewki przyłączono diodę V (rozładowczą). Po skokowym odłączeniu
napięcia od uzwojenia cewki, energia zgromadzona w cewce rozładowuje się w postaci prądu
elektrycznego, poprzez diodę rozładowczą.
Przebieg prądu cewki przekaźnika przy skokowym odłączeniu napięcia od jej zacisków,
przedstawiono na rysunku 1.5.
Przy skokowym odłączeniu napięcia Ue od zacisków cewki, w chwili t0, zaczyna maleć prąd, a tym
samym siła przyciągania zwory przekaźnika. W chwili t1 siła przyciągania elektromagnesu jest
mniejsza od sumarycznej siły sprężyny powrotnej i stykowej. Następuje ruch zwory. W chwili t2
następuje rozwarcie styków przekaźnika, a w chwili t3 położenie zwory ustala się przy MAX.
Ue
t
Ie
t0
Ruch zwory
Ieust
Styki zwarte
Styki rozwarte
Iezw
t
t0
t1 t3
t2
Ieust - ustalony prąd cewki elektromagnesu.
Iezw - prąd zwolnienia styków przekaźnika.
Rys. 1.5. Przebieg prądu cewki przekaźnika przy skokowym odłączeniu napięcia od jej zacisków
W przedziale czasu od t1 do t3 prąd rośnie, gdyż w uzwojeniach cewki indukuje się napięcie Ui,
które jest skierowane przeciwnie do napięcia indukowanego w przypadku narastania strumienia
magnetycznego. Wartość i zwrot napięcia indukowanego Ui zależy od wartości i znaku pochodnej
d
d
. W tym przypadku, kiedy szczelina rośnie, wartość strumienia maleje i pochodna
posiada
dt
dt
znak ujemny.
d
Ui z
,
dt
Ie t
Ui
.
Z e t
Po chwili t3, kiedy zwora osiąga szczelinę MAX, zanika napięcie Ui, ale prąd jeszcze płynie, gdyż
następuje dalsze rozładowanie energii elektromagnetycznej zgromadzonej w obwodzie przekaźnika.
Po pewnym czasie prąd osiąga wartość zero.
1.1.2. Opis stycznika o magnetowodzie nurnikowym
Zasada działania stycznika jest podobna do działania przekaźnika. Na rysunku 1.6 przedstawiono
podstawowe elementy stycznika.
4
1
2
3
4
5
6
+Ue
Le1
7
Le2
-Ue
8
Oznaczenia:
1 - Sprężyna stykowa (zderzakowa);
2 - Styki ruchome;
3 - Styki nieruchome;
4 - Nurnik;
5 - Sprężyna powrotna;
6 - Sworzeń;
7 - Magnetowód;
8 - Styki dodatkowe;
Le1 - Zasadnicze uzwojenie
elektromagnesu;
Le2 - Dodatkowe uzwojenie
elektromagnesu (oszczędnościowe);
Ue - Napięcie zasilania elektromagnesu.
Rys 1.6. Rysunek uproszczony stycznika o magnetowodzie nurnikowym
Funkcję zwory spełnia tutaj nurnik. Jest on zarazem ruchomą częścią rdzenia elektromagnesu.
Siła nośna powoduje wciąganie nurnika do wnętrza elektromagnesu. Wykonując ruch nurnik pociąga
zarazem sworzeń i styki ruchome. Sworzeń napina sprężynę powrotną. Po zwarciu styków sworzeń
przesuwa się dalej napinając sprężynę stykową. Sprężyna stykowa zabezpiecza styki przed
nadmiernym odbijaniem.
Charakterystyki statyczne stycznika przedstawiono na rysunku 1.7.
Fm , Fe
Fe()- 1
Fe()- 3
Fsp+ss()
Fss()
Fsp()
Fe()- 2
MIN
ZS
MAX
Oznaczenia:
ZS
- szczelina powietrzna w momencie zwierania
styków;
FSP() - charakterystyka mechaniczna sprężyny
powrotnej;
FSS() - charakterystyka mechaniczna sprężyny stykowej;
FSP+SS() - sumaryczna charakterystyka mechaniczna obu
sprężyn;
Fe()-1 - charakterystyka elektromechaniczna (dla prądu
zadziałania);
Fe()-2 - charakterystyka elektromechaniczna (dla prądu
zwalniania);
Fe()-3 - charakterystyka elektromechaniczna po
włączeniu dodatkowego uzwojenia
elektromagnesu.
Rys. 1.7. Charakterystyki statyczne stycznika
Należy jeszcze zwrócić uwagę na pewne szczególne różnice konstrukcyjne. Uzwojenie
elektromagnesu składa się z dwóch części. Uzwojenie oznaczone Le1 (główne) wytwarza niezbędną
siłę do zadziałania stycznika. Uzwojenie oznaczone Le2 (dodatkowe) początkowo jest zwarte. Po
przyciągnięciu nurnika sworzeń wysuwa się z rdzenia i powoduje rozwarcie styków dodatkowych.
Uzwojenie Le2 zostaje włączone szeregowo do uzwojenia Le1. Ponieważ jego rezystancja jest duża,
to wartość prądu elektromagnesu maleje. W ten sposób następuje, po zadziałaniu stycznika obniżenie
prądu w uzwojeniu elektromagnesu. Zastosowanie takiego rozwiązania zmniejsza zarówno
nagrzewanie się uzwojenia jak i obciążenie układu zasilania. Siła przyciągania wytwarzana przez oba
uzwojenia jest wystarczająca do utrzymania nurnika w stanie przyciągniętym. Rozwiązanie
z uzwojeniem dodatkowym stosowane jest także w niektórych rodzajach przekaźników.
Podstawowe właściwości zestyków aparatury komutacyjnej
1. Rezystancja zestyku zależy od siły docisku styków oraz od stopnia ich zabrudzenia (opalenia).
2. W czasie zwierania styków następuje ich odbijanie. W celu zmniejszenia odbijania styków stosuje
się sprężyny stykowe (zderzakowe).
3. W czasie rozwierania styków następuje przeskok iskry elektrycznej, co powoduje ich opalanie,
a w skrajnym przypadku zespawanie styków. W celu zmniejszenia opalania styków stosuje się
odpowiednie układy gaszenia łuku elektrycznego.
5
1.3.3. Podstawowe dane dotyczące badanej aparatury komutacyjnej
Tabela 1.1.
Uzwojenie sterujące
Styki główne
Lp.
1.2.
Typ
Prąd
znamion.
Przedział
napięcia
roboczego
[A]
[V]
1
2
3
4
KM–200D
TKS–101DT
KP–50D
TKD–501DT
200
100
50
50
5
6
7
8
TKE–53PD
TKE–52PK
TKE–21PDT
RP–2
5
5
2
5
Napięcie
znamion.
[V]
Stycznik
24÷30
24÷30
27
24÷30
24÷30
Przekaźnik
24÷30
16÷30
27
24÷30
24÷30
Napięcie
zadziałania
Napięcie
zwolnienia
styków
Pobór
prądu
[V]
[V]
[mA]
14.5÷20
14÷18
14.5÷20
14.5÷20
3.5÷5
4.5÷5.5
3.5÷5
3.5÷5
500
415
400
420
14÷18
9÷12
14÷18
14÷18
5÷6.5
2÷3
5÷6.5
5÷6.5
170
290
108
150
CEL ĆWICZENIA
Celem ćwiczenia jest zapoznanie studentów z podstawowymi rodzajami aparatury komutacyjnej,
jej parametrami i charakterystykami oraz rejestracja tychże charakterystyk w trakcie realizacji
ćwiczenia.
1.3.
ZAKRES ĆWICZENIA
W czasie ćwiczenia
i charakterystyk:
studenci
winni
dokonać
pomiarów
następujących
parametrów
1. Przebiegu prądu elektromagnesu i napięcia na stykach stycznika i przekaźnika przy skokowym
podaniu napięcia zasilania na cewkę elektromagnesu.
2. Przebiegu prądu elektromagnesu i napięcia na stykach stycznika i przekaźnika przy skokowym
odłączeniu napięcia zasilania cewki elektromagnesu.
3. Czasu trwania odbijania styków stycznika i przekaźnika przy skokowym podaniu napięcia zasilania
na cewkę elektromagnesu.
4. Czasu trwania odbijania styków przełącznika po jego komutacji.
1.4.
BADANIE DYNAMICZNYCH CHARAKTERYSTYK APARATURY KOMUTACYJNEJ
1.4.1. Opis stanowiska laboratoryjnego
Na rysunku 1.8 przedstawiono widok zestawu stanowiska laboratoryjnego do badania aparatury
komutacyjnej w stanach dynamicznych. Stanowisko składa się z:
– pulpitu sterująco–pomiarowego;
– zasilacza 30V/20A;
– oscyloskopu cyfrowego;
– drukarki;
– badanego przekaźnika (stycznika).
Pulpit sterująco–pomiarowy
Na płycie czołowej pulpitu zabudowano elementy, których wykaz i przeznaczenie opisano poniżej:
1. Zaciski laboratoryjne z napisem:
– „+, -, 27V” – do przyłączenia zasilacza 30[V]/20[A].
– „A, B, CEWKA” – do przyłączenia cewki badanego przekaźnika lub stycznika.
– „STYKI NR” – do przyłączenia normalnie rozwartych styków badanego przekaźnika lub
stycznika.
2. Gniazda pomiarowe z napisem:
– „Ust-S1”, „UZAS”, „Ie” i „Ust” – do przyłączenia kanałów oscyloskopu.
– „Wyzw.” – do przyłączenia gniazda oscyloskopu „Ext. Trigger”.
3. Wyłącznik „S1” – do włączenia zasilania stanowiska +27[V].
6
4. Przełącznik „S2 BADANY” z napisem „PRZEKAŹNIK–STYCZNIK”, do przełączenia cewek
aparatury komutacyjnej do odpowiednich rezystorów w celu pomiaru wartości prądu płynącego
przez cewki.
5. Dioda luminescencyjna z napisem „ZWARCIE STYKÓW” – do sygnalizacji zwarcia styków.
OSCYLOSKOP
HP 54603B
Zasilacz
30V/20A
OSCYLOSKOP
+ Ust- S1 Uzas
Ie
DRUKARKA
Wyzw.
U st
27V
BADANY
PRZEKAŹNIK
(STYCZNIK)
STANOWISKO DO BADANIA DYNAMICZNYCH
CHARAKTERYSTYK APARATURY KOMUTACYJNEJ
1
1
STYKI
NR
ZWARCIE
STYKÓW
2
3
S1
A
PRZEKAŹNIK
B
A
BADANY
0
STYCZNIK
CEWKA
S2
B
PULPIT STERUJĄCO - POMIAROWY
Rys. 1.8. Stanowisko laboratoryjne do badania dynamicznych charakterystyk aparatury komutacyjnej
Pulpit sterujący umożliwia sterowanie pracą stycznika lub przekaźnika oraz podanie
odpowiednich sygnałów elektrycznych do wejść oscyloskopu w celu rejestracji charakterystyk
dynamicznych badanej aparatury komutacyjnej. Schemat elektryczny stanowiska przedstawia rysunek
1.9.
Przełącznik „S1” poprzez układ sterujący podaje skokowo napięcie na tranzystor V1. Tranzystor
zasila cewkę stycznika lub przekaźnika. Przełącznik „S1” podaje zasilanie także na dzielnik napięcia
DN1, z którego sygnał podawany jest do oscyloskopu w celu rejestracji napięcia na stykach
przełącznika po jego komutacji. Przełącznikiem „S2” przyłącza się odpowiedni bocznik amperomierza
w zależności od badanej aparatury komutacyjnej.
Dioda sygnalizuje zwarcie zestyków stycznika lub przekaźnika. Z dzielnika napięcia DN2 napięcie
proporcjonalne do napięcia zasilającego podawane jest do oscyloskopu, zaś z dzielnika napięcia DN3
podawane jest napięcie proporcjonalne do napięcia panującego na stykach stycznika lub przekaźnika.
Wyzw. oscyl.
+27V Zwarcie
styków
1
Układ
sterujący
S1
+
27V
-
V1
A
R5
B
R6
Ust
DN3
Ie
0
R1
DN1 R2 Ust - S1
Uzas
R3
R4
DN2
Stycznik
RB1
S2
Przekaźnik
RB2
Rys. 1.9. Schemat elektryczny stanowiska laboratoryjnego do badania dynamicznych charakterystyk aparatury
komutacyjnej
Przy skokowym odłączeniu napięcia zasilającego cewkę elektromagnesu stycznika lub
przekaźnika, poprzez diodę V2 rozładowuje się energia zgromadzona w cewce, co zapobiega
uszkodzeniu tranzystora V1.
Na bocznikach RB1 i RB2 odkłada się spadek napięcia proporcjonalny do płynącego prądu.
Prądowi I=1[A] płynącemu przez bocznik RB1 odpowiada spadek napięcia U=1[V], zaś prądowi
I=100[mA] płynącemu przez bocznik RB2 odpowiada spadek napięcia U=1[V].
7
1.4.2. Badanie charakterystyk dynamicznych stycznika
W celu dokonania pomiarów charakterystyk dynamicznych aparatury komutacyjnej należy
zestawić układ pomiarowy zgodnie ze schematem zamieszczonym na rysunku 1.8.
Przygotowanie stanowiska i oscyloskopu cyfrowego
Połączyć stanowisko zgodnie z rysunkiem 1.8.
Przełącznik „S2” ustawić w położenie „STYCZNIK”.
Na zasilaczu ustawić napięcie U=27[V].
Do gniazda pomiarowego „Ie” przyłączyć 1 kanał oscyloskopu.
Do gniazda pomiarowego „UZAS” przyłączyć 2 kanał oscyloskopu.
Gniazdo pomiarowego „Wyzw.” połączyć z gniazdem oscyloskopu External Trigger.
Przygotować oscyloskop do pracy zgodnie ze wskazówkami zawartymi w załączniku nr1, punkt
1.1 i 1.2 (z uwzględnieniem poniższych punktów).
8. Ustawić wyzwalania oscyloskopu naciskając na przycisk Source i Ext na płycie czołowej
oscyloskopu, a następnie Slope/Coupling i Slope .
9. Na oscyloskopie ustawić parametry pracy zgodnie z wartościami podanymi w poniższej tabeli.
Pokrętłem Level ustawić poziom wyzwalania równy 1[V].
1.
2.
3.
4.
5.
6.
7.
UWAGA!
Wartości nastaw oscyloskopu są podawane jako nastawy wstępne. Każdy użytkownik,
w zależności od potrzeb, może wprowadzić inne wartości nastaw.
Kanał
2
1
2
Mierzona
wielkość
UZAS
Ie
Ust
Wzmocnienie
[V/dz]
5
1
2
Poziom zerowy
[V]
+10
-1
-6
Horizontal
[ms]
Tabela 1.2.
Podstawa czasu
[ms/dz]
-10
5
1.4.2.1. Badanie dynamicznych charakterystyk stycznika przy skokowym podaniu napięcia na
jego cewkę
1. Włączyć zasilacz.
2. Wyłączyć 1 kanał oscyloskopu naciskając dwukrotnie na przycisk 1 kanału, następnie nacisnąć
przycisk Run.
3. Włączyć zasilanie cewki stycznika ustawiając przełącznik „S1” w położenie „1” - na ekranie ukaże
się zarejestrowana ch-ka UZAS.
4. Wyłączyć zasilanie cewki stycznika ustawiając przełącznik „S1” w położenie „0”.
5. W pamięci oscyloskopu zapisać zarejestrowaną charakterystykę pozostawiając jej przebieg na
ekranie oscyloskopu.
6. Kanał 2 oscyloskopu przyłączyć do gniazda pomiarowego „Ust”, a kanał 1 włączyć naciskając
jednokrotnie na przycisk 1 kanału.
7. Ustawić nowe położenie zerowe kanału 2 dla rejestracji ch-ki napięcia styków Ust i nacisnąć
przycisk Run.
8. Włączyć ponownie zasilanie cewki stycznika ustawiając przełącznik „S1” w położenie „1” - na
ekranie ukażą się zarejestrowane ch-ki Ie i Ust razem z poprzednią charakterystyką UZAS .
9. W pamięci oscyloskopu zapisać zarejestrowane charakterystyki.
10. Pomierzyć kursorami oscyloskopu:
maksymalną wartość prądu cewki stycznika IeMAX;
wartość prądu przytrzymania styków Ieprzytrz;
czas zadziałania stycznika tza.
11. Pomierzone wartości zanotować w tabeli 1.3.
12. Wydrukować zarejestrowane charakterystyki.
13. Wyczyścić pamięć i wyłączyć jej zobrazowanie.
Przykładowe charakterystyki stycznika zostały pokazana na rysunku 1.10.
8
1 200 m
V 2 5.00V
15.0 ms
5.00 ms
Sngl E STOP
UZAS
Ie
2
Ie
IeMAX
Ie przytrz
1
0
Ust
2
tza
Rys.1.10. Charakterystyki dynamiczne stycznika przy skokowym podaniu napięcia na jego cewkę
Rodzaj badanego stycznika
IeMAX
[A]
Ieprzytrz
[mA]
tza
[ms]
tzw
[ms]
Tabela 1.3.
todb
[ms]
1.4.2.2. Badanie charakterystyk dynamicznych stycznika przy skokowym wyłączeniu zasilania
jego cewki
1. Zmienić nastawy oscyloskopu zgodnie z tabelą 1.4.
Kanał
2
1
2
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
Mierzona
wielkość
UZAS
Ie
Ust
Wzmocnienie
[V/dz]
5
0,1
2
Poziom
zerowy
[V]
+15
-0,1
-6
[ms]
Podstawa
czasu
[ms/dz]
20
20
Horizontal
Tabela 1.4.
Poziom
wyzwalania
[V]
1
-
Do gniazda pomiarowego „UZAS” przyłączyć 2 kanał oscyloskopu.
Wyłączyć 1 kanał oscyloskopu naciskając dwukrotnie na przycisk 1 pierwszego kanału.
Włączyć zasilanie cewki stycznika ustawiając przełącznik „S1” w położenie „1”.
Na oscyloskopie nacisnąć przycisk Run.
Wyłączyć zasilanie cewki stycznika ustawiając przełącznik „S1” w położenie „0” - na ekranie ukaże
się zarejestrowana ch-ka UZAS.
W pamięci oscyloskopu zapisać zarejestrowaną charakterystykę pozostawiając jej przebieg na
ekranie oscyloskopu.
Kanał 2 oscyloskopu przyłączyć do gniazda pomiarowego „Ust”, a kanał 1 włączyć naciskając
jednokrotnie na przycisk 1 kanału.
Ustawić nowe położenie zerowe kanału 2 dla rejestracji ch-ki napięcia styków Ust (tab. 1.4).
Włączyć zasilanie cewki stycznika ustawiając przełącznik „S1” w położenie „1” i nacisnąć przycisk
Run.
Wyłączyć ponownie zasilanie cewki stycznika ustawiając przełącznik „S1” w położenie „0” - na
ekranie ukażą się zarejestrowane ch-ki Ie i Ust razem z poprzednią charakterystyką UZAS.
Zapisać w pamięci oscyloskopu zarejestrowane charakterystyki.
Wykorzystując funkcje Cursors oscyloskopu, pomierzyć przy użyciu kursorów, czas zwolnienia
styków tzw i zanotować go w do tabeli 1.3.
Wydrukować zarejestrowane charakterystyki.
Wyczyścić pamięć i wyłączyć jej zobrazowanie.
Przykładowe charakterystyki stycznika zostały pokazana na rysunku 1.11.
9
1 10
m
V
45.00
2 5.00V
m
s
10.00 ms
Sngl E STOP
UZAS
2
Ie
Ie
Ust
0
1
Rozwarcie
styków
2
tzw
Rys.1.11. Charakterystyki dynamiczne stycznika przy skokowym odłączeniu napięcia od jego cewki
1.4.2.3. Pomiar czasu odbijania się styków stycznika po włączeniu go do pracy
Wykonać czynności podobnie, jak w punkcie 1.4.2.1.
1. Wyłączyć kanał 1 oscyloskopu.
2. Ustawić wyzwalania sygnałem kanału 2. W tym celu nacisnąć przycisk na oscyloskopie Source
i 2, a następnie Slope/Coupling i Slope .
3. Zarejestrować tylko charakterystykę Ust przy nowych nastawach oscyloskopu zgodnie z tabelą
1.5.
4. Pomierzyć kursorami oscyloskopu czas odbijania styków todb i zanotować jego wartość w tabeli
1.3.
Kanał
2
Mierzona
wielkość
Ust
Wzmocnienie
[V/dz]
1
Poziom
zerowy
[V]
-2
[ms]
Podstawa
czasu
[s/dz]
2
500
Horizontal
Tabela 1.4.
Poziom
wyzwalania
[V]
1
Przykładowa charakterystyka stycznika została pokazana na rysunku 1.12.
Na zarejestrowanych charakterystykach należy nanieść symbol stycznika, symbole wielkości,
skalę prądu, wartości prądów zapisanych w tabeli 1.3 oraz pomierzone czasy.
2.25 ms
1 1.00V
500 s
Sngl E STOP
Ust
1
todb
Rys.1.12. Pomiar czasu odbijania się styków stycznika po włączeniu go do pracy
1.4.3. Badanie charakterystyk dynamicznych przekaźnika
W celu realizacji pomiarów charakterystyk dynamicznych przekaźnika należy do stanowiska
przyłączyć badany przekaźnik.
1.4.3.1. Badanie charakterystyk dynamicznych przekaźnika przy skokowym podaniu napięcia
na jego cewkę
1. Przełącznik „S2” ustawić w położenie „PRZEKAŹNIK”.
2. Zmienić nastawy oscyloskopu wg tabeli 1.6.
10
Kanał
2
1
2
Mierzona
wielkość
UZAS
Ie
Ust
Poziom
zerowy
[V]
+15
-1
-6
Wzmocnienie
[V/dz]
5
0,5
2
[ms]
Podstawa
czasu
[ms/dz]
8
5
Horizontal
Tabela 1.6.
Poziom
wyzwalania
[V]
1
-
3. Pozostałe czynności wykonać wg punktów 1.4.2.1.
4. Pomierzyć prąd ustalony cewki Ieust (prądowi 0,1[A] odpowiada napięcie 1[V]) i czas zadziałania
przekaźnika tza. Wartości te zanotować w tabeli 1.7.
5. Wydrukować zarejestrowane charakterystyki.
Przykładowe charakterystyki przekaźnika zostały pokazane na rysunku 1.13.
Ieust z
[A]
Rodzaj badanego przekaźnika
1 100 m
2 5.00V
V
tza
[ms]
8.00
m
s
2.00ms
tzw
[ms]
Tabela 1.7.
todb
[ms]
Sngl E STOP
2
UZAS
Ie
Ieust
Ie
1
0
Ust
2
tza
Rys.1.13. Charakterystyki dynamiczne przekaźnika przy skokowym podaniu napięcia na jego cewkę.
1.4.3.2. Badanie charakterystyk dynamicznych przekaźnika przy skokowym wyłączeniu
zasilania jego cewki
1.
Zmienić nastawy oscyloskopu zgodnie z tabelą 1.8.
Kanał
2
1
2
Mierzona
wielkość
UZAS
Ie
Ust
Wzmocnienie
[V/dz]
5
0,5
2
Poziom
zerowy
[V]
+15
-0,5
-6
[ms]
Podstawa
czasu
[ms/dz]
20
10
Horizontal
Tabela 1.8.
Poziom
wyzwalania
[V]
1
-
2. Wykonać czynności podobnie, jak w punkcie 1.4.2.2.
3. Pomierzyć kursorami czas zwolnienia styków tzw. Wartość tą zanotować w tabeli 1.7.
4. Wydrukować charakterystyki.
Przykładowe charakterystyki przekaźnika zostały pokazane na rysunku 1.14.
m
1 100m
2 5.00V
V
20.00 s 5.00ms
Uz
Sngl E STOP
2
Ie
Ie
1
0
Ust Rozwarcie styków
2
tzw
Rys.1.14. Charakterystyki dynamiczne przekaźnika przy skokowym wyłączeniu zasilania jego cewki
11
1.4.3.3. Pomiar czasu odbijania się styków przekaźnika po włączeniu go do pracy
1.
Zmienić nastawy oscyloskopu zgodnie z tabelą 1.9.
Kanał
2
2.
3.
Mierzona
wielkość
Ust
Wzmocnienie
[V/dz]
2
Poziom
zerowy
[V]
-2
[s]
Podstawa
czasu
[s/dz]
900
200
Horizontal
Tabela 1.9.
Poziom
wyzwalania
[V]
1
Wykonać czynności podobnie, jak w punkcie 1.4.2.3.
Pomierzyć kursorami oscyloskopu czas odbijania styków todb i zanotować jego wartość w tabeli
1.7.
Przykładowa charakterystyka przekaźnika przedstawiona jest na rysunku 1.15.
Na zarejestrowanych charakterystykach należy nanieść symbol przekaźnika, symbole wielkości,
skalę prądu, wartości prądów zapisanych w tabeli 1.7 oraz czas odbijania się styków.
900 s
1 1.00V
200 s
Sngl E STOP
todb
Ust
1
Rys.1.15. Pomiar czasu odbijania się styków przekaźnika po włączeniu go do pracy
1.4.4. Pomiar czasu odbijania się styków wyłącznika „S1” po jego komutacji
1.
Zmienić nastawy oscyloskopu zgodnie z tabelą 1.10.
2.
Kanał 2 oscyloskopu przyłączyć do gniazda pomiarowego Ust-S1.
Kanał
2
3.
4.
Mierzona
wielkość
Ust-S1
Wzmocnienie
[V/dz]
1
Poziom
zerowy
[V]
-2
[ms]
Podstawa
czasu
[s/dz]
1
500
Horizontal
Tabela 1.9.
Poziom
wyzwalania
[V]
1
Wykonać czynności podobnie, jak w punkcie 1.4.3.3.
Pomierzyć kursorami oscyloskopu czas odbijania styków todb i zanotować jego wartość w tabeli
1.11.
Rodzaj badanego wyłącznika
todb [ms]
Tabela 1.11.
2WG
Przykładowy oscylogram odbijania styków wyłącznika „S1” został pokazany na rysunku 1.16.
12
1.75 ms
1 1.00V
500 s
Sngl E STOP
todb
Ust
1
Rys.1.16. Pomiar czasu odbijania się styków przełącznika „S1” po jego komutacji
Na zarejestrowanej charakterystyce należy nanieść symbol wyłącznika, i czas odbijania się
styków.
PROGRAM ĆWICZENIA
1.5.
Pomiary charakterystyk wykonać zgodnie z wymienionymi poniżej punktami.
1.5.1.
1.5.2.
1.5.3.
1.5.4.
1.5.5.
1.5.6.
1.5.7.
1.6.
Badanie dynamicznych charakterystyk stycznika przy skokowym podaniu napięcia na
jego cewkę (wg pkt. 1.4.2.1.)
Badanie charakterystyk dynamicznych stycznika przy skokowym wyłączeniu zasilania
jego cewki (wg pkt. 1.4.2.2.)
Pomiar czasu odbijania się styków stycznika po włączeniu go do pracy (wg pkt.
1.4.2.3.)
Badanie charakterystyk dynamicznych przekaźnika przy skokowym podaniu napięcia
na jego cewkę (wg pkt. 1.4.3.1.)
Badanie charakterystyk dynamicznych przekaźnika przy skokowym wyłączeniu
zasilania jego cewki (wg pkt. 1.4.3.2.)
Pomiar czasu odbijania się styków przekaźnika po włączeniu go do pracy (wg pkt.
1.4.3.3.)
Pomiar czasu odbijania się styków wyłącznika „S1” po jego komutacji (wg pkt. 1.4.4.)
UWAGI KOŃCOWE
W wyniku wykonania ćwiczenia należy przedstawić sprawozdanie, które powinno zawierać:
schematy układów pomiarowych;
opisane oscylogramy;
wyniki pomiarów;
wnioski.
1.7.
PYTANIA KONTROLNE
Omówić przeznaczenie i podział aparatury komutacyjnej.
Omówić przeznaczenie i podział manualnej aparatury komutacyjnej.
Omówić budowę, zasadę działania i rodzaje przekaźników.
Omówić układ sił działających na zworę przekaźnika.
Omówić zależność Ie=f(t) prądu w uzwojeniu przekaźnika przy skokowym podaniu napięcia
zasilającego na jego cewkę.
6. Omówić budowę styczników.
7. Omówić zasadę działania i rodzaje styczników.
8. Omówić cel stosowania, budowę i zasadę działania układu przytrzymującego (tzw. układu
oszczędnościowego).
1.
2.
3.
4.
5.
9. Omówić zależność Ie=f(t) prądu w uzwojeniu stycznika z układem przytrzymującym przy
skokowym podaniu napięcia zasilającego na jego cewkę.
13
ZAŁĄCZNIK NR 1
INSTRUKCJA UŻYTKOWANIA OSCYLOSKOPU TYPU HP 54603
Do rejestracji przebiegów czasowych i charakterystyk służy oscyloskop cyfrowy. Drukarka
przyłączona do oscyloskopu umożliwia wydrukowanie zarejestrowanych przebiegów czasowych
i charakterystyk.
Do sterowania pracą oscyloskopu służą pokrętła i przyciski umieszczone na obudowie, które
w tekście będą opisane pismem pogrubionym np. Destination.
Przyciski programowalne są umieszczone pod ekranem oscyloskopu i będą one opisane
w tekście pismem pochyłym pogrubionym np. Parallel.
1.
REJESTRACJA OKRESOWYCH PRZEBIEGÓW CZASOWYCH
Użytkowanie oscyloskopu przy rejestracji okresowych przebiegów czasowych będzie omówione na
przykładzie rejestracji przebiegów napięcia zasilania i prądu roboczego wzmacniacza magnetycznego DO–12–
70N dla dwóch wartości prądu sterującego.
1.1.
Ogólne przygotowanie oscyloskopu cyfrowego i drukarki
Przyłączyć drukarkę do oscyloskopu – złącze Parallel.
Włączyć zasilanie oscyloskopu przyciskiem Line.
Nacisnąć przycisk Print/Utility, a następnie Hardcopy Menu.
Przyciskiem Format wybrać HP print, a przyciskiem Destination wybrać Parallel.
Nacisnąć przycisk Printer Menu.
Przyciskiem Faktors wybrać rodzaj drukowania ch-k (Off):
Off – drukowanie ch-k bez wypisywania nastaw oscyloskopu;
On – drukowanie ch-k z wypisaniem nastaw oscyloskopu.
8. Przyciskiem Gray Scale (skala szarości) wybrać zakres Off.
1.
2.
3.
4.
5.
6.
1.2.
Przygotowanie oscyloskopu do rejestracji okresowych przebiegów czasowych
1. Kanały oscyloskopu przyłączyć do odpowiednich gniazd pomiarowych wymienionych w instrukcji
danego ćwiczenia np.: do gniazda pomiarowego „UZ” (napięcie zasilania) przyłączyć 1-szy kanał
oscyloskopu. a do gniazda pomiarowego „Ir” (prąd roboczy wzmacniacza magnetycznego)
przyłączyć 2-gi kanał oscyloskopu.
2. Ustawić tryb pracy oscyloskopu naciskając na przycisk Main/Delayed oraz Main.
3. Pokrętłem Volts/div ustawić wzmocnienia 1 i 2 kanału na odpowiednie wartości.
4. Pokrętłem Position 1 i 2 kanału ustawić ich poziomy zerowe.
5. Ustawić wyzwalania oscyloskopu sygnałem kanału 1 naciskając na przycisk Source i 1.
6. Ustawić tryb pracy oscyloskopu naciskając na przycisk Mode i Auto.
7. Pokrętłem Level ustawić poziom wyzwalania.
8. Pokrętłem Time/div ustawić podstawę czasu.
9. Nacisnąć przycisk 1 kanału i przyciskiem Coupling wybrać DC. Powtórzyć czynności dla kanału 2.
10. Pokrętłem HORIZONTAL ustawić trójkąt na środku ekranu. Podczas pokręcania tym pokrętłem na
oscyloskopie pojawia się komunikat, na jaką wartość (w ms lub s) ustawiony jest trójkąt,
w stosunku do środka ekranu.
11. Jeżeli istnieje potrzeba wyłączenia danego kanału, to należy nacisnąć 2 razy na przycisk tego
kanału. Ponowne włączenie kanału nastąpi po jednokrotnym naciśnięciu przycisku.
1.3.
Rejestracja okresowych przebiegów wzmacniacza magnetycznego
Włączyć zasilanie stanowiska.
Na pulpicie stanowiska przełącznikami S5 ÷ S6 ustawić daną konfigurację pracy wzmacniacza.
Potencjometrem „Regulacja IS” ustawić żądaną wartość prądu sterującego.
Na ekranie oscyloskopu ukażą się przebiegi napięcia zasilającego UZ i prądu roboczego Ir dla
danej wartości prądu sterującego.
5. Ustawić wyzwalanie oscyloskopu sygnałem 1-szego kanału.
1.
2.
3.
4.
Jeżeli istnieje konieczność zgrupowania na jednym ekranie przebiegów prądu roboczego dla
dwóch różnych wartości prądu sterującego, to należy:
uzyskane przebiegi napięcia zasilania i prądu roboczego dla pierwszej wartości prądu sterującego
zapisać w pamięci oscyloskopu (patrz pkt. 3.4);
otworzyć użytą pamięć;
14
zmienić wartość prądu sterującego.
Na ekranie ukażą się trzy przebiegi. Gdyby przebieg napięcia zasilającego zapisanego w pamięci
oscyloskopu nie pokrywał się z przebiegiem napięcia uzyskanego przy drugiej wartości prądu
sterującego, to należy pokrętłem Level ustawić poziom wyzwalania tak, aby oba przebiegi napięć
pokryły się.
Na rysunku Z.1 przedstawiono przykładowe przebiegi UZ i Ir dla dwóch wartości IS.
Ir UZ
UZ
1 20.0 V 2 1V
Ir (IS>0)
151 ms
STOP
t
0
t
0
Ir (IS=0)
Rys. Z.1. Przykładowe przebiegi UZ i Ir wzmacniacza magnetycznego dla dwóch wartości IS
Zarejestrowane przebiegi można wydrukować. W tym celu należy nacisnąć przycisk Print/Utility
i Print Screen (czekać do zakończenia drukowania).
POMIAR WARTOŚCI NAPIĘĆ I CZĘSTOTLIWOŚCI PRZEBIEGÓW OKRESOWYCH
2.
Za pomocą oscyloskopu można pomierzyć wartości:
napięcia skutecznego – Vrsm;
napięcia średniego – Vavg;
napięcia międzyszczytowego – Vp-p;
częstotliwości.
Aby pomierzyć odpowiednią wartość napięcia należy:
w zbiorze przycisków Measure nacisnąć na przycisk Voltage;
wybrać odpowiedni kanał, w którym będzie dokonywany pomiar, naciskając na przycisk Source 1
lub 2;
wybrać rodzaj mierzonego napięcia naciskając na odpowiedni przycisk Vp-p, Vavg, lub Vrms. Na
ekranie wyświetli się wartość mierzonego napięcia.
Aby pomierzyć wartość częstotliwości sygnału wybranego kanału należy:
w zbiorze przycisków Measure nacisnąć na przycisk Time;
wybrać odpowiedni kanał, w którym będzie dokonywany pomiar, naciskając przycisk Source 1 lub
2;
nacisnąć na przycisk Freg Na ekranie wyświetli się wartość częstotliwości wybranego sygnału.
3.
REJESTRACJA KRÓTKOTRWAŁYCH CHARAKTERYSTYK CZASOWYCH
Użytkowanie oscyloskopu przy rejestracji krótkotrwałych charakterystyk czasowych będzie omówione na
przykładzie pomiaru prądu i prędkości obrotowej silnika w czasie jego rozruchu.
3.1.
Przygotowanie oscyloskopu cyfrowego do rejestracji krótkotrwałych charakterystyk czasowych
1. Kanały oscyloskopu przyłączyć do odpowiednich gniazd pomiarowych wymienionych w instrukcji
danego ćwiczenia np.: do gniazda pomiarowego „n M” przyłączyć 1-szy kanał oscyloskopu. a do
gniazda pomiarowego „IROZR” przyłączyć 2-gi kanał oscyloskopu.
2. Ustawić tryb pracy oscyloskopu naciskając na przycisk Main/Delayed oraz Main.
3. Pokrętłem Volts/div ustawić wzmocnienia 1 i 2 kanału na odpowiednie wartości.
4. Pokrętłem Position 1 i 2 kanału ustawić ich poziomy zerowe.
5. Ustawić wyzwalania oscyloskopu sygnałem kanału 1 naciskając na przycisk Source i 1.
6. Wybrać tryb pracy oscyloskopu naciskając na przycisk Mode i Single.
7. Nacisnąć na przycisk Slope/Couplng i ustawić wyzwalania odpowiednim zboczem np.
narastającym Slope , a przyciskiem Coupling wybrać DC.
15
8. Pokrętłem Level ustawić poziom wyzwalania.
9. Pokrętłem Time/div ustawić podstawę czasu.
10. Nacisnąć przycisk 1 kanału i przyciskiem Coupling wybrać DC. Powtórzyć czynności dla kanału 2.
11. Pokrętłem HORIZONTAL ustawić trójkąt w odpowiedniej odległości np. 1 działka od lewego
brzegu ekranu (lub np. 20ms). Podczas pokręcania tym pokrętłem na oscyloskopie pojawia się
komunikat, na jaką wartość (w ms lub s) ustawiony jest trójkąt, w stosunku do środka ekranu.
Początek rejestrowanej charakterystyki pojawi się w takiej odległości od początku ekranu, w jakiej
odległości został ustawiony trójkąt.
3.2.
Pomiar charakterystyk
1. Nacisnąć na przycisk Run.
2. Na pulpicie stanowiska ustawić przełącznik „ROZRUCH” w położenie „Wł”.
Nastąpi podanie napięcia na wirnik silnika, który ruszy. Prędkość obrotowa będzie narastać i po pewnym
czasie ustali się. Na ekranie oscyloskopu zostaną zarejestrowane charakterystyki prędkości obrotowej i prądu
silnika w czasie rozruchu.
Na rysunku Z.2 przedstawiono przykładowy przebieg prędkości obrotowej i prądu silnika w czasie
rozruchu.
n
ROZRUCH
Kursor V2(1)
nu
0,95nu
Kursor t1
Kursor t2
trozruchu
IA
Kursor V2(2)
Kanał 1
1
t
2
t
Kursor V1(1)
IRMAX
Kanał 2
Kursor V1(2)
Rys. Z.2. Oscylogram przebiegu prędkości obrotowej i prądu silnika w czasie rozruchu
3.3.
Pomiar kursorami oscyloskopu wartości czasów i napięć
1. Na uzyskanym oscylogramie pomierzyć kursorami „V1” i „V2” ustaloną wartość prędkości
obrotowej wirnika silnika. W tym celu należy nacisnąć na przycisk Cursors i Source 1 – kursory V
będą mierzyć napięcia zgodnie ze wzmocnieniem kanału 1. Położenia kursorów można zmieniać
pokrętłem znajdującym się w pobliżu przycisku „Cursors”.
2. Nacisnąć na przycisk V1(1), kursor ten winien ustawić się na poziomie zerowym kanału
pierwszego.
3. Nacisnąć na przycisk V2(1), i kursorem tym pomierzyć ustaloną wartość prędkości obrotowej.
4. Obliczyć 0,95nust (w woltach). Na tej wartości ustawić kursor V2(1).
5. Nacisnąć na przycisk t1 i kursor t1 ustawić na początku narastania prądu wirnika silnika „IA”.
Nacisnąć na przycisk t2 i kursor t2 ustawić na przecięciu się charakterystyki z kursorem V2.
Odczytać t – jest to wartość czasu rozruchu silnika.
6. Pomierzyć kursorami „V1 i V2” maksymalną wartość prądu rozruch silnika. W tym celu należy
nacisnąć na przycisk Cursors i Source 2 – kursory V będą mierzyć napięcia zgodnie ze
wzmocnieniem kanału 2.
7. Nacisnąć na przycisk V2(2), i kursorem tym pomierzyć maksymalną wartość prądu rozruch silnika.
8. Kursory można wyłączyć naciskając na przycisk Clear Cursors.
Uzyskany oscylogram można wydrukować. W tym celu należy nacisnąć przycisk Print/Utility
i Print Screen (czekać do zakończenia drukowania).
3.4.
Zapisywanie charakterystyk w pamięci oscyloskopu
Niekiedy występuje konieczność porównania charakterystyk otrzymanych w czasie dwóch
oddzielnych pomiarów. W takim wypadku należy skorzystać z pamięci oscyloskopu. Poniżej zostanie
16
przedstawiona kolejność czynności w czasie zapisu dwóch charakterystyk n=f(t) dla napięć zasilania
silnika U=12[V] i U=24[V].
1. Wykorzystując tylko 1 kanał zarejestrować charakterystykę n=f(t) dla napięcia zasilania silnika
UA=12[V].
2. Zapisać w pamięci oscyloskopu uzyskany przebieg prędkości obrotowej dla napięcia zasilania
UA=12[V]:
nacisnąć przycisk Trace, a następnie wybrać Mem1(lub Mem2);
przyciskiem Clear Mem1 wyczyścić pamięć i przyciskiem Save to Mem1 zapisać w pamięci ch-kę
oraz otworzyć użytą pamięć przyciskiem On.
3. Nacisnąć na przycisk Run.
4. Zarejestrować następną charakterystykę n=f(t) dla napięcia zasilania silnika UA=24[V]. Na ekranie
oscyloskopu będą widniały dwie osobno pomierzone charakterystyki.
5. Ponownie zapisać w pamięci pomierzone charakterystyki wg pkt. 2.
Gdyby charakterystyki nie zostały zapisane, to przy przypadkowym poruszeniu jakiegokolwiek
pokrętła lub przycisku oscyloskopu, druga charakterystyka zaniknie i wówczas należałoby
powtórzyć pomiar.
6. Wydrukować charakterystyki.
7. Wyczyścić pamięć przez naciśnięcie przycisku Clear Mem1 i zamknąć pamięć przyciskiem Off.
Na rysunku Z.3 przedstawiono przykładowo dwie charakterystyki n=f(t) dla napięcia zasilania
silnika U=12[V] i U=24[V].
n
ROZRUCH
U A=24V
TM
UA=12V
nust
0,63nust
0
Rys. Z.3. Dwie charakterystyki n=f(t) (mierzone oddzielnie) dla napięcia zasilania silnika U=12V i U=24V
4.REJESTRACJA CHARAKTERYSTYK W TRYBIE XY
4.1.
Przygotowanie oscyloskopu cyfrowego do rejestracji charakterystyk w trybie XY
1. Kanały oscyloskopu przyłączyć do odpowiednich gniazd pomiarowych wymienionych w instrukcji
danego ćwiczenia np.: do gniazda pomiarowego „I M” przyłączyć 1-szy kanał oscyloskopu. a do
gniazda pomiarowego „P1” przyłączyć 2-gi kanał oscyloskopu.
2. Ustawić tryb pracy oscyloskopu naciskając na przycisk Main/Delayed oraz XY.
3. Nacisnąć przycisk 1 kanału i przyciskiem Coupling wybrać DC. Powtórzyć czynności dla kanału 2.
4. Pokrętłami Volts/div ustawić wzmocnienia 1 i 2 kanału.
5. Ustawić poziomy zerowe kanałów (początek układu współrzędnych XY):
nacisnąć na przycisk Cursors i w zbiorze Active Cursors wybrać Y1 oraz X1. Ukażą się dwa
kursory, a ich przecięcie stanowi początek układu współrzędnych XY.
pokrętłami Position 1 i 2 kanału ustawić ich poziomy zerowe. W czasie pokręcania tych
pokręteł, kursory będą się przemieszczać, a na ekranie ukaże się wartość napięcia, przy którym
nastąpiło ustawienie poziomu zerowego danego kanału (względem środka ekranu).
4.2.
Pomiar charakterystyk
1. Nacisnąć na przycisk Run i Auto-Store (poruszająca się plamka będzie zostawiała ślad na
ekranie).
2. Uruchomić badany układ stanowiska laboratoryjnego. Niekiedy występuje stan przejściowy
badanej wielkości np. ustalenie prądu silnika, dlatego, przed właściwą zmianą badanych wielkości,
należy wyczyścić ekran naciskając na przycisk Erase.
3. W pewnych przypadkach, niektóre wielkości, po dojściu do wartości maksymalnych, skokowo
maleją do wartości zerowej. W takim przypadku, przed dojściem do wartości maksymalne, należy
nacisnąć na przycisk Stop.
17
4. Aby pomierzyć następną charakterystykę, należy nacisnąć na przycisk Run i Auto-Store.
5. Pomierzone charakterystyki można grupować wykorzystując pamięć oscyloskopu (pkt. 3.4).
4.3.
Pomiar kursorami oscyloskopu wartości napięć odpowiadających poszczególnym
punktom charakterystyki
Aby pomierzyć wartości napięć odpowiadających poszczególnym punktom charakterystyki należy:
1. Nacisnąć przycisk Cursors i w kanale X nacisnąć na X1, a pokrętłem Cursors ustawić kursor w
żądanym miejscu. Wskaże on wartość napięcia na osi X. Jeżeli zostanie naciśnięty przycisk X2 i
pokrętłem Cursors, kursor X2 zostanie ustawiony w innym miejscu, to kursor ten wskaże inną
wartość napięcia na osi X. Można odczytać wartość X(1).
2. W kanale Y nacisnąć na Y1, a pokrętłem Cursors ustawić kursor w żądanym miejscu. Następnie
nacisnąć na Y2 i pokrętłem Cursors ustawić kursor w innym żądanym miejscu. Odczytać Y(2).
Na rysunku Z.4 przedstawiono oscylogram przebiegu trzech mocy w funkcji prądu silnika.
Pokazano także, jak ustawiać kursory, w celu pomierzenia wartości mocy w wybranym punkcie
charakterystyki.
1 500 mV
P
2 1.00V
Kursor X1
STOP
XY
Kursor X2
P1M
Kursor Y2
P2M
Kursor Y2
P3
IM
0,7
1,15
Kursor Y1
Rys. Z.4. Pomiar kursorami oscyloskopu wartości napięć odpowiadających poszczególnym punktom
charakterystyki
18