Moduł 4
Układy sterowania przekaźnikowo-stycznikowego
1. Struktura układu sterowania przekaźnikowo-stycznikowego
2. Budowa i działanie podstawowych elementów układów przekaźnikowostycznikowych
3. Przykłady przekaźnikowo-stycznikowych układów sterowania
4. Zasady bezpieczeństwa podczas użytkowania układów przekaźnikowostycznikowych
5. Bibliografia
1. Struktura układu sterowania przekaźnikowo-stycznikowego
Układy przekaźnikowo-stycznikowe wykorzystywane są do:
automatyzacji procesów technologicznych,
sterowania pracą grupy urządzeń elektrycznych,
zabezpieczania urządzeń przed uszkodzeniem,
sygnalizacji stanów pracy urządzeń układów,
podtrzymania pracy urządzeń,
blokady – niedopuszczenia do wykonywania błędnych czynności sterowniczych.
Układy automatyki można podzielić na dwa rodzaje:
układy automatycznego sterowania
układy regulacji automatycznej
Różnicę między automatycznym sterowaniem a automatyczną regulacją wyjaśniają
schematy blokowe.
Rys. 4.1. Schematy blokowe układów: a) automatycznego sterowania, b) automatycznej regulacji
[opracowanie własne]
Sterowanie polega na bezpośrednim lub pośrednim oddziaływaniu na urządzenia
kierujące pracą silnika w zależności od zmian określonych wielkości fizycznych (np. napięcia, natężenia prądu, temperatury, ciśnienia, prędkości, przebytej drogi, itp.).
W układzie automatycznej regulacji z rysunku 1b pracą obiektu regulacji kieruje
układ regulujący (regulator). Automatyczny układ regulacji działa zawsze w tym kierunku, aby wartość mierzona y równała się wartości zadanej x.
Elektryczne układy sterowania automatycznego można podzielić na dwie grupy:
układy sterowania stycznikowo-przekaźnikowe,
układy sterowania sekwencyjnego (kolejnościowego).
W skład układów przekaźnikowo – stycznikowych wchodzą dwa podstawowe
elementy: przekaźniki i styczniki.
Dodatkowo stosowane są również urządzenia pomocnicze, jak:
przyciski (zwierne, rozwierne),
lampki sygnalizacyjne,
dzwonki,
buczki.
W każdym układzie sterowania wyróżnia się dwa obwody:
obwód roboczy (zwany również głównym lub siłowym) – obwód elektryczny zapewniający bezpośrednią drogę przepływu prądu od źródła energii do urządzenia, które podlega sterowaniu,
2
obwód sterowniczy – obwód elektryczny powodujący załączanie lub wyłączanie
urządzenia sterowanego.
2. Budowa i działanie podstawowych elementów układów przekaźnikowo-stycznikowych
Styczniki są elementami wykonawczymi, które włączają w odpowiedniej chwili
obwody robocze urządzenia sterowanego.
Przekaźniki sterują pracą styczników, powodując wzbudzenie cewek styczników
w zależności od określonych czynników – czasu, przebytej drogi, prędkości obrotowej,
temperatury, ciśnienia i innych wielkości fizycznych występujących w procesach technologicznych. W zależności od tych czynników rozróżnia się sterowanie w funkcji: czasu,
drogi, prędkości itp.
Sterowanie sekwencyjne stosuje się w urządzeniach, w których zachodzi konieczność wykonywania odpowiednich czynności przez podzespoły w ściśle określonej kolejności.
Rys. 4.2. Szkice budowy styczników: a) o prostoliniowym ruchu styków ruchomych: b) o ruchu kołowym 1 – podstawa izolacyjna, 2 – elektromagnes, 3 – zwora elektromagnesu, 4 – styki.
[http://www.zue.pwr.wroc.pl/download/lab_urzadzen/13.pdf]
Styczniki charakteryzuje bardzo prosta konstrukcja łączników i ich napędów, co
powoduje, że odznaczają się one bardzo dużą trwałością mechaniczną i dużą częstością
łączeń. Styczniki wykonuje się przeważnie z napędem w postaci elektromagnesu z ruchomą zworą, do której są przymocowane styki ruchome. Doprowadzenie napięcia do
elektromagnesu powoduje zwarcie styków. Zwarcie trwa tak długo, jak długo podłączone jest napięcie.
Rys. 4.3. Przykład schematu połączeń w styczniku: a) symbol graficzny, b schematyczne przedstawienie budowy
stycznika o trzech zestykach zwiernych Z1, Z2, Z3 w obwodzie głównym i po jednym zestyku zwiernym z1 i rozwiernym Z2 w obwodzie pomocniczym [matel.p.lodz.pl/wee/k23/instrukcje_doc/cw_12/CWICZENIE_12.doc]
3
W styczniku występują zestyki obwodu głównego (załączające obwody zasilające
silniki prądem elektrycznym o dużej mocy) oraz zestyki obwodu pomocniczego (załączające obwody sygnalizacji lub blokady o mniejszej mocy). Styczniki budowane są na
prądy do 400A. Dla większych prądów wykonywane są łączniki zapadkowe.
Styczniki budowane są jako styczniki prądu zmiennego, stałego oraz uniwersalne.
Duża trwałość mechaniczna i łączeniowa sprawiają, że styczniki są stosowane praktycznie we wszystkich układach napędowych oraz w układach automatyki, blokad
i uzależnień.
Teraz przejdź do wykonania zadania 1 umieszczonego na platformie.
Przekaźnikami są przyrządy, które pod wpływem zmiany określonej wielkości fizycznej sterują obwodami elektrycznymi. Przekaźniki elektryczne mogą działać pod
wpływem zmian natężenia prądu, napięcia, kierunku przepływu prądu, częstotliwości,
przesunięcia fazowego, temperatury, ciśnienia, itp.
Rys. 4.4. Zasada działania przekaźnika
[http://www.castrolprofessionalacademy.pl/upload/files/strefa_wiedzy/samochod/instalacja_elektryczna/2011/prz
ekazniki-elektryczne-budowa-zasada-dzialania-sterowanie.pdf]
Przepływ prądu elektrycznego przez uzwojenie elektromagnesu przekaźnika wywołuje powstanie silnego pola magnetycznego w rdzeniu elektromagnesu. Zwora zostaje
przyciągnięta do rdzenia i łączy styki przekaźnika. Ten stan określamy jako włączenie
przekaźnika. Po przerwaniu przepływu prądu przez cewkę zanika pole magnetyczne
i sprężyna powrotna odciąga zworę od rdzenia. Styki przekaźnika ulegają ponownemu
rozwarciu. Przekaźnik jest w stanie wyłączonym.
Budowa i sposób działania styczników oraz przekaźników są podobne. Różnią się
one sposobem wykorzystania: styczniki służą do łączenia obwodów głównych o większym obciążeniu prądowym (np. silników), natomiast przekaźniki mają za zadanie łączenie obwodów pomocniczych (np. sterowniczych, sygnalizacyjnych).
Styczniki mogą być wyposażone w przekaźniki cieplne bimetalowe przeznaczone do
ochrony silników przed przeciążeniem. Sterowanie styczników odbywa się za pośrednictwem łączników pomocniczych (np. przekaźników) lub przycisków sterowniczych.
Stycznik wykorzystywany jest do częstego rozwierania i zwierania obwodu przy normalnych czynnościach eksploatacyjnych silnika, takich jak rozruch, hamowanie, regulacja prędkości obrotowej itp.
Układy przekaźnikowo – stycznikowe często są bardzo rozbudowane. Pokazanie sposobu połączeń zacisków poszczególnych styczników i przekaźników na schematach
montażowych powoduje konieczność stosowania uproszczeń – stosowanie schematów
ideowych.
Na schematach ideowych elektrycznych obwód główny rysuje się linią grubą zaś
obwód sterujący linią cienką. Poszczególne elementy układu sterującego przedstawia się
4
na tych schematach przy pomocy symboli graficznych. Symbole te rozmieszczone są na
schemacie tak, aby połączenia były jak najkrótsze, bez zbędnych krzyżowań i załamań
przewodów.
Tabela 4.1. Symbole graficzne, najczęściej stosowane w schematach elektrycznych, urządzeń sterowniczych i
sygnalizacyjnych
5
[matel.p.lodz.pl/wee/k23/instrukcje_doc/cw_12/CWICZENIE_12.doc]
Schematy rysuje się zawsze w stanie bezprądowym i beznapięciowym. Wyłączniki są
w stanie otwartym, a przyciski – nienaciśnięte. Taki stan nazywa się stanem normalnym.
W stycznikach i przekaźnikach oraz innych łącznikach elektrycznych (np. przyciski,
przełączniki) stosowane są następujące rodzaje zestyków:
zestyki normalnie otwarte (rozwarte, zwierne) – styki, które są otwarte w stanie
beznapięciowym, a zwierają się dopiero po włączeniu prądu do odpowiedniego.
zestyki normalnie zamknięte (zwarte, rozwierne) – styki, które w stanie beznapięciowym są zamknięte, a rozwierają się z chwilą włączenia prądu do obwodu sterującego.
zestyki przełączające – para styków, styki normalnie otwarte oraz styki normalnie
zamknięte.
Rys. 4.5. Schemat budowy przekaźnika elektrycznego o stykach: 1. normalnie rozwartych,
2. normalnie zwartych, 3. przełączających
[http://www.castrolprofessionalacademy.pl/upload/files/strefa_wiedzy/samochod/instalacja_elektryczna/2011/prz
ekazniki-elektryczne-budowa-zasada-dzialania-sterowanie.pdf]
Rys. 4.6. Schematyczne przedstawienie przekaźników o stykach: 1. normalnie rozwartych,
2. normalnie zwartych, 3. przełączających
[http://home.agh.edu.pl/~fkaszuba/pliki/uk_przek.pdf]
W zależności od wykonywanych funkcji dzielimy przekaźniki na pomiarowe i pomocnicze. Przekaźnik pomiarowy reaguje na wartość wielkości oddziaływującej i ma
podziałkę nastawień tej wielkości. Przekaźnik pomocniczy reaguje na pojawienie się lub
zanik wielkości oddziaływającej i nie ma podziałki nastawień. Przekaźniki pomocnicze
dzielą się na pośredniczące, sygnałowe, czasowe i zwłoczne.
Przekaźniki pośredniczące dokonują przełączeń obwodów wyjściowych bezpośrednio pod wpływem zmian sygnału wejściowego przekaźnika.
6
Przekaźniki zwłoczne umożliwiają uzyskanie zwłoki w zadziałaniu przekaźnika potrzebnej do odpowiedniego uruchomienia urządzenia sterowanego. Czas zwłoki jest stały dla określonego przekaźnika.
Przekaźniki sygnałowe dodatkowo wyposażone są we wskaźnik optyczny umożliwiający obserwację stanu pracy przekaźnika.
Przekaźniki czasowe stosuje się w celu uzyskania opóźnienia czasowego w zadziałaniu elementu (urządzenia) sterowanego tym przekaźnikiem. Wartość opóźnienia czasowego może być nastawiana w zakresie właściwym dla danego przekaźnika. Przekaźniki czasowe mogą realizować różne funkcje przełączania (tab. 4.2).
Tabela 4.2. Typowe funkcje przekaźników czasowych
Nazwa funk-
cji
Załączenie
z opóźnieniem
Opis funkcji
a) sygnał wyjściowy WY pojawia
się po upływie czasu t od momentu pojawienia się impulsu
sygnału wejściowego WE,
b) sygnał wyjściowy WY pojawia
się po upływie czasu t od momentu pojawienia się
sygnału wejściowego WE, a zanika w momencie zaniku sygnału WE.
Taktowanie
z opóźnieniem
Taktowanie
bez opóźnienia
Wyłączenie
z opóźnieniem
Załączenie
sowe
Po załączeniu sygnału WE następuje pojawianie się z zanikanie sygnału WY, czas trwania i pojawiania się
sygnału WY wynosi t. Pierwszy impuls WY pojawia się z opóźnieniem
t.
Po załączeniu sygnału WE następuje pojawianie się z zanikanie sygnału WY, czas trwania i pojawiania się
sygnału WY wynosi t. Pierwszy impuls WY pojawia się razem z sygnałem WE.
Sygnał wyjściowy WY pojawia się
w tym samym momencie, co sygnał
wejściowy WE, a zanika po upływie
czasu t od momentu zaniku sygnału
WE.
cza- Sygnał wyjściowy WY pojawia się
w tym samym momencie, co impuls
sygnału wejściowego WE, i czas
jego trwania wynosi t.
Wykres czasowy
WE
a)
t
WY
b)
WE
t
WY
WE
t
t
t
t
t
t
t
t
WY
WE
WY
WE
t
WY
WE
t
WY
7
Przesunięcie cza- Opóźnienie załączenia i wyłączenia
sowe sygnału
sygnału WY w stosunku do sygnału
WE wynosi t.
WE
WY
t
t
t
t
[opracowanie własne]
Rys. 4.7. Widok przekaźnika czasowego
[http://www.schrack.pl/sklep/przekaznik-czasowy-wielofunk-7-funkcji-2p-8a-250v-12-240v-ac-zr5b0025.html]
Przekaźniki jako zabezpieczenia
Tak jak bezpieczniki chronią przed skutkami zwarć, tak przekaźniki termobimetalowe chronią przed skutkami przeciążeń. Przekaźniki termobimetalowe są najczęściej
włączane w obwód sterowania.
Elementy termiczne przekaźnika są nagrzewane albo bezpośrednio z głównego obwodu prądowego, albo za pośrednictwem przekładników prądowych. Przekaźnik termobimetalowy składa się z dwóch metalowych pasków o różnej rozszerzalności cieplnej, połączonych na całej długości oraz zestyku rozwiernego. Pod wpływem nagrzewania prądem pasek wygina się w kierunku metali o mniejszej rozszerzalności cieplnej.
Gdy prąd przekroczy nastawioną wartość, wyginający się pasek rozwiera zestyk, powodując przerwę w obwodzie sterowania i tym samym wyłączenie obwodu.
Rys. 4.8. Zasada działania przekaźnika termobimetalowego:
1 – bimetal, 2 – zestyk rozwierny, 3 – zatrzask zestyku
[Kotlarski W., Grad J.: Aparaty i urządzenia elektryczne. WSiP, Warszawa 1995]
Teraz przejdź do wykonania zadania 2 umieszczonego na platformie.
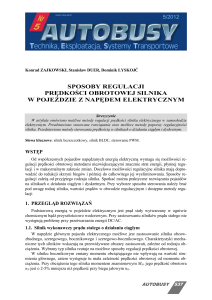
W układach sterowania przekaźnikowo-stycznikowego coraz częściej są stosowane
przekaźniki programowalne umożliwiające znaczne uproszczenie struktury układów
sterowania.
8
Przekaźniki programowalne są to urządzenia łączeniowo-sterujące przeznaczone
do sterowania nieskomplikowanych układów automatyki. Algorytm (program sterowniczy) wprowadzony do pamięci przekaźnika może być wielokrotnie zmieniany i modyfikowany.
W budowie przekaźników programowalnych wyróżnia się trzy podstawowe człony:
moduły wejściowe,
jednostka centralna,
moduły wyjściowe.
W skład modułów wejściowych wchodzą cyfrowe oraz analogowe wejścia, do których podłącza się sygnały z czujników, styków, zadajników oraz innych urządzeń. Ich
zadaniem jest wprowadzenie do przekaźnika tych sygnałów, aby na ich postawie realizować zadany program sterowania.
Jednostka centralna (procesor) zajmuje się wykonaniem zapisanego w pamięci algorytmu sterowania, w oparciu o dane wczytane przez moduły wejściowe.
Wyniki obliczeń w postaci sygnałów sterujących są następnie przekazywane do modułów wyjściowych.
Do programowania przekaźników programowalnych wykorzystuje się komputery
lub panele programowania wbudowane w przekaźnik. Program sterowniczy może być
wprowadzany za pomocą karty pamięci zewnętrznej.
Rys. 4.9. Schematyczne przedstawienie możliwości zastosowania przekaźnika programowalnego
[http://www.anim.com.pl/comat.htm]
Sygnałami wejściowymi przekaźnika mogą być np.: temperatura, ciśnienie, poziom
substancji w zbiorniku, wielkości elektryczne i inne.
Sygnały generowane przez przekaźnik programowalny najczęściej są wykorzystywane do sterowania urządzeń w instalacjach ogrzewania, przepływu medium w rurociągach, oświetlenia, wentylacji, napędów. Nowoczesne przekaźniki programowalne
mogą drogą bezprzewodową przekazywać informacje o stanie układu sterowanego do
centrów rejestracji lub zarządzania przebiegiem procesu realizowanego przez układ.
9
Teraz przejdź do wykonania zadania 3 umieszczonego na platformie.
Rys. 4.10. Przyciski sterownicze
[http://www.sn-promet.com.pl/index.php?strona=katalogi_do_pobrania]
Przycisk sterowniczy umożliwia załączenie i wyłączenie obwodu. Po naciśnięciu Z
zamykamy obwód, urządzenie zostaje uruchomione. Po naciśnięciu W przerywamy obwód – urządzenie zostaje zatrzymane.
W tym przypadku wszystkie przyciski załączające łączy się równolegle, wyłączające –
szeregowo.
Z
W
Rys. 4.11. Schemat budowy i zasada działania przycisków sterowniczych. Z – przycisk załączający
W – przycisk wyłączający [http://www.sn-promet.com.pl/index.php?strona=katalogi_do_pobrania]
Przyciski sterownicze z grzybkiem o kolorze czerwonym stosowane są do awaryjnego wyłączania urządzeń elektrycznych. Mają one eliminować ryzyko zagrożenia dla personelu, uszkodzenia urządzenia lub łagodzenie istniejących zagrożeń ma to być osiągnięte przez jednorazowe użycie przycisku bezpieczeństwa.
Łączniki drogowe (krańcowe) spełniają zasadniczo tę samą rolę, co przyciski sterownicze. Różnica polega jedynie na tym, że przyciski sterownicze naciska obsługujący,
zaś wyłączniki drogowe uruchamiane są przy pomocy mechanicznie poruszanych zderzaków. Dlatego wyłączniki drogowe muszą być mocniejsze od przycisków sterowniczych i powinny mieć specjalną konstrukcję w zależności od zastosowania.
Rys. 4.12. Łącznik krańcowy
[http://www.tme.eu/pl/katalog/?art=LK-20]
10
Lampek sygnalizacyjnych używa się w obwodach kontrolnych do bezpośredniego
i zdalnego nadzorowania procesów łączeniowych, do wizualizowania i sygnalizowania
stanu pracy zespołów oraz poszczególnych urządzeń wchodzących w skład układu sterowania.
Rys. 4.13. Przykłady lampek sygnalizacyjnych
[http://www.sn-promet.com.pl/index.php?strona=katalogi_do_pobrania]
3. Przykłady przekaźnikowo-stycznikowych układów sterowania
Układ sterowania oświetleniem
Rys. 4.14. Układ sterowania oświetleniem
[opracowanie własne]
W wyniku naciśnięcia załącznika ZAL następuje załączenie obwodu zasilania cewki
stycznika ST i zwarcie zestyku ST w obwodzie wyjściowym stycznika i zapalenie lampy.
Po puszczeniu przycisku załącznika ZAL zostaje przerwany przepływ prądu przez cewką
stycznika ST i wygaszenie lampy. Naciskając wyłącznik bezpieczeństwa WYL w każdej
chwili można przerwać działanie lampy.
11
Układy samopodtrzymujące
Rys. 4.15. Układy samopodtrzymujące: a) z dominującym wyłączeniem, b) z dominującym załączeniem
[opracowanie własne]
Często stosowane są układy samopodtrzymujące (zwane układami pamięciowymi),
umożliwiające zapamiętanie faktu wystąpienia w układzie określonego zdarzenia. Wyróżnia się dwa rodzaje układów samopodtrzymujących:
układ samopodtrzymujący z dominującym załączeniem (z priorytetem załączenia),
układ samopodtrzymujący z dominującym wyłączeniem (z priorytetem wyłączenia).
W układach przedstawionych na rys. 4.14 zapamiętywane są sygnały załącz ZA oraz
wyłącz WY. Elementem umożliwiającym zapamiętanie jest przekaźnik pomocniczy K
(lub K1). Po zadziałaniu przycisku załącz ZA przekaźnik K (lub K1) zostanie wzbudzony
i zestyki K (lub K1) zostaną zamknięte dzięki czemu zagwarantowane jest zasilanie
przekaźnika nawet w przypadku zaprzestania działania przycisku ZA – żarówka Z świeci. Po zadziałaniu przycisku wyłącz WY zasilanie przekaźnika K (lub K1) zanika i zestyki
K (lub K1) zostają otwarte – żarówka Z przestaje świecić.
W przypadku układu z dominującym wyłączeniem (rys. 4.14a) jednoczesne naciśniecie przycisków ZA i WY skutkuje brakiem wzbudzenia cewki K i nieświeceniem żarówki Z – układ wykonuje polecenie wyłącz WY.
W przypadku układu z dominującym załączeniem (rys.4.14b) jednoczesne naciśniecie przycisków ZA i WY skutkuje wzbudzeniem cewki K1 i świeceniem żarówki Z – układ
wykonuje polecenie załącz (ZA).
Teraz przejdź do wykonania zadania 4 umieszczonego na platformie.
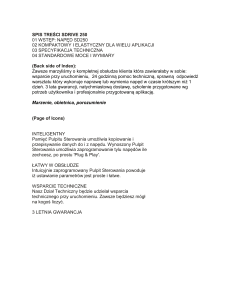
Na rys. 4.15. pokazano schemat ideowy rozwinięty układu sterowania rozruchu bezpośredniego silnika asynchronicznego zwartego. Po naciśnięciu przycisku załączającego
PZ1 następuje przepływ prądu od przewodu L, przez zwarty zestyk przycisku PW, zwarty zestyk przycisku PZ1, uzwojenie cewki ST1 i zadziałanie stycznika, w wyniku czego
następuje zwarcie zestyków głównych oraz zestyku pomocniczego ST1. Zwarcie zestyku
pomocniczego ST1 zapewnia podtrzymanie przepływu prądu przez cewkę ST1 w momencie rozwarcia zestyku przycisku PZ1. Wyłączenie silnika nastąpi w momencie naciśnięcia przycisku PW. Wówczas przerwany zostaje obwód zasilający cewkę stycznika i
otwierają się styki obwodu głównego.
12
Rys. 4.16. Schemat ideowy układu sterowania rozruchu bezpośredniego silnika asynchronicznego zwartego. ST1 –
cewka stycznika; ST1 – zestyk zwierny pomocniczy, PZ1 – przycisk załączający, PW – przycisk wyłączający ST1
[matel.p.lodz.pl/wee/k23/instrukcje_doc/cw_12/CWICZENIE_12.doc]
Układ sterowania nawrotnego silnika asynchronicznego zwartego
Rys. 4.17. Schemat ideowy układu sterowania układu nawrotnego silnika asynchronicznego zwartego
[matel.p.lodz.pl/wee/k23/instrukcje_doc/cw_12/CWICZENIE_12.doc]
Układ sterowania nawrotnego silnika, czyli układ do zmiany kierunku wirowania silnika wykorzystuje dwa styczniki ST1 i ST2 (rys. 4.15). Po naciśnięciu przycisku załączającego np. dla kierunku wirowania w „prawo” (PZ1) zostaje włączony stycznik ST1 i silnik zaczyna się obracać w „prawo”. Zaczyna działać samopodtrzymanie pracy stycznika
ST1 w chwili rozwarcia się zestyku PZ1. Jednocześnie rozwierają się styki pomocnicze
rozwierne ST1, co uniemożliwia włączenie silnika dla biegu w „lewo”. Jest to blokada
elektryczna niedopuszczająca do jednoczesnego włączania obu styczników i zabezpieczająca przed powstaniem zwarcia w układzie. Wyłączenie silnika następuje albo przez
naciśnięcie przycisku wyłączającego PW, albo (w przypadku przeciążenia silnika) na
skutek zadziałania przekaźnika termicznego PT i rozwarcia zestyku t. Po zatrzymaniu
silnika naciskamy przycisk PZ2 i uruchamiamy silnik w „lewo”. Zostają wówczas zwarte
styki pomocnicze ST2 stycznika ST2 zapewniając pracę silnika po rozwarciu zestyku
PZ2. Jednocześnie zostają rozwarte styki pomocnicze rozwierne ST1 uniemożliwiające
13
włączenie stycznika ST1. Ł – trójbiegunowy łącznik o napędzie ręcznym załączający zasilanie.
Teraz przejdź do wykonania zadania 5 umieszczonego na platformie.
Sterowanie rozruchowe przełączające uzwojenie stojana silnika asynchronicznego
zwartego z układu gwiazdy w układ trójkąta stosowane jest głównie do napędu silników
mniejszej i średniej mocy przy rozruchu lekkim lub przy rozruchu bez obciążenia. Zalecane jest stosowanie określonego kryterium czasowego między załączeniem w gwiazdę
a załączeniem w trójkąt. Czas odmierza najczęściej przekaźnik czasowy.
Na rysunku 4.16 przedstawiono schemat układu sterowania rozruchowego gwiazdatrójkąt w funkcji czasu. Po załączeniu przycisku PZ1 zostaje włączony stycznik ST3, jednocześnie zwiera się zestyk pomocniczy ST3 i rozwiera zestyk ST3. Powoduje
to zadziałanie przekaźnika czasowego PC3, który zaczyna odmierzać nastawiony czas
opóźnienia. Równocześnie włączony zostaje stycznik ST1, który załącza zestyki
w obwodzie głównym. Ponieważ wcześniej zostały zwarte zestyki stycznika ST3, uzwojenie stojana silnika było połączone w gwiazdę i następuje rozruch silnika. Rozwarty
zestyk ST3 uniemożliwia włączenie w tym czasie stycznika ST2, co doprowadziłoby do
zwarcia sieci zasilającej. Po upływie czasu nastawionego w przekaźniku czasowym rozwiera się zestyk pc3 i zostaje wyłączony stycznik ST3. Następuje zwarcie zestyku ST3
(który do tej pory był rozwarty), a ponieważ zwarty jest także zestyk ST1, zostaje włączony stycznik ST2. Uzwojenie stojana silnika połączone zostaje w trójkąt, równocześnie
zakończył się proces rozruchu silnika. Należy zauważyć, że styczniki ST3 połączenia w
gwiazdę i ST2 połączenia w trójkąt pracują w układzie blokady wykluczającej. Wyłączenie silnika nastąpi po naciśnięciu przycisku PW. Ponowne naciśnięcie przycisku PZ1
spowoduje automatyczny rozruch silnika wg opisanego powyżej programu.
Rys. 4.18. Schemat ideowy układu sterowania układu sterowania silnika asynchronicznego zwartego z rozruchem
w układzie trójkąt-gwiazda w funkcji czasu: a) schemat układu obwodów głównych b) schemat układu obwodów
sterujących
[matel.p.lodz.pl/wee/k23/instrukcje_doc/cw_12/CWICZENIE_12.doc]
14
Teraz przejdź do wykonania zadania 6 umieszczonego na platformie.
4. Zasady bezpieczeństwa podczas użytkowania układów przekaźnikowo-stycznikowych.
Te informacje znajdziesz również w materiale video umieszczonym na platformie.
Użytkowanie urządzeń elektrycznych związane jest z występowaniem zagrożeń dla
zdrowia i życia człowieka. Najważniejszym zagrożeniem jest porażenie prądem elektrycznym, czyli efekt powstający w wyniku przepływu prądu elektrycznego o odpowiednio wysokim natężeniu przez organizm ludzki. Prąd elektryczny przepływając
przez organizm ludzki, powoduje:
porażenie ośrodków nerwowych (zaburzenia w pracy serca, wstrzymanie oddechu);
poparzenia zewnętrzne i wewnętrzne;
zatrucie organizmu.
Szczególnie niebezpieczny jest przypadek, gdy prąd o natężeniu około 0,1 A przepływa przez klatkę piersiową. Zaburzenia w działaniu serca powodują wówczas z reguły
śmierć. Przyjmuje się, że prąd elektryczny o napięciu do 42 V ( w pomieszczeniu suchym) jest prądem bezpiecznym dla człowieka, natomiast w pomieszczeniu mokrym
bezpieczna wartość napięcia wynosi do 24 V.
Zabezpieczenia przed porażeniami polegają na zastosowaniu:
osłonięcia części będących pod napięciem, w celu uniemożliwienia ich dotknięcia;
napisów i tablic ostrzegawczych (tablice ostrzegawcze);
obniżonego napięcia, bezpiecznego dla życia ludzkiego w pomieszczeniach zagrożonych;
izolacji ochronnej (izolacji rękojeści szczypiec, obudowa izolacyjna lamp);
uziemienia części metalowych niebędących pod napięciem, ze względu na możliwość przerzutu napięcia w razie uszkodzenia izolacji;
specjalnych wyłączników ochronnych, działających w wypadku przerzutu napięcia na części, niebędące pod napięciem podczas normalnej pracy.
Obudowy i osłony urządzeń elektrycznych powinny być wykonane tak, aby w warunkach eksploatacji zapewniały bezpieczeństwo ludzi oraz chroniły urządzenia przed
zniszczeniem i niewłaściwym działaniem na skutek przedostania się do ich wnętrza ciał
stałych, pyłu, wody oraz przed uszkodzeniami mechanicznymi.
Urządzenia i obwody elektryczne powinny posiadać zabezpieczenia elektryczne zabezpieczające je oraz osoby obsługujące przed skutkami nieprawidłowego działania sieci, np. przed zwarciami.
Urządzenia i obwody elektryczne powinny być wyposażone w następujące rodzaje
zabezpieczeń:
zwarciowe – przerywające obwód elektryczny po przekroczeniu w przewodzie
określonej wartości natężenia prądu (bezpieczniki, wyłączniki instalacyjne);
przeciwprzepięciowe – chroniące urządzenia przed przepięciami występującymi
w sieci,
przeciw asymetrii – chroniące urządzenia wielofazowe przed zanikiem jednej z faz
prądu trójfazowego;
15
wyłączniki różnicowo-prądowe – urządzenie powodujące szybkie wyłączenie zasilania już w momencie niewielkiego pogorszenia stanu izolacji podstawowej, w wyniku czego płynie tzw. prąd upływu;
przeciążeniowe – mają za zadanie przerywać przepływ prądu przeciążeniowego
o danej wartości, zanim wystąpi niebezpieczeństwo uszkodzenia izolacji, połączeń
zacisków oraz otoczenia na skutek nadmiernego wzrostu temperatury.
Bardzo istotne podczas użytkowania urządzeń elektrycznych jest postępowanie
osób zaangażowanych w proces użytkowania, ponieważ od niego zależy tzw. bezpieczeństwo czynne.
Podczas obsługi urządzeń elektrycznych należy:
zachowywać się spokojnie i uważnie;
stosować się do przepisów obsługiwania i wskazań personelu wykwalifikowanego;
często kontrolować stan izolacji urządzeń;
często kontrolować stan urządzeń ochronnych;
zachować środki ostrożności przy wysokim napięciu oraz w pomieszczeniach
wilgotnych.
Nie wolno w czasie użytkowania i obsługiwania urządzeń elektrycznych:
dokonywać zmian i napraw w urządzeniach elektrycznych, nie mając odpowiednich uprawnień i kwalifikacji;
używać uszkodzonych aparatów i przyrządów elektrycznych;
używać części urządzeń elektrycznych do innych celów niż ich przeznaczenie;
umieszczać w pobliżu nieokapturzonych maszyn i przewodów materiałów łatwopalnych.
Bibliografia:
1. Jabłoński W., Płoszajski G.: Elektrotechnika z automatyką. WSiP, Warszawa 2003
2. Schmid D., Baumann A., Kaufmann H., Paetzold H.,Zippel B.: Mechatronika. REA, Warszawa, 2002
3. Siemieniako F., Gawrysiak M.: Automatyka i robotyka. WSiP, Warszawa, 1996
Netografia:
1. http://www.anim.com.pl/comat.htm - ANIM Sebastian Kufel, COMAT - Przekaźniki,Przekaźniki specjalne
2. ftp://ftp.pw.plock.pl/pub/people/mszreder/Elektrotechnika/Styczniki%20stero
wanie.pdf - dr in. Mariusz Szreder: Podstawowe elementy układu sterowania za
pomoc styczników.
3. http://matel.p.lodz.pl/wee/k23/instrukcje_doc/cw_12/CWICZENIE_12.doc - Zakład Przekładników i Kompatybilności Elektromagnetycznej, UKŁADY STEROWANIA PRZEKAŹNIKOWO-STYCZNIKOWEGO.
16
4. http://www.rcezbilgoraj.lbl.pl/podstrony/ee/download/5/23.pdf - Regionalnej
Centrum Edukacji Zawodowej w Biłgoraju, Badanie układów stycznikowoprzekaźnikowych.
5. http://sn-promet.pl/pl/content/38-katalog-produktow - PROMET, Katalog produktów do pobrania.
6. http://zeisp.up.lublin.pl/downloads/instrukcja_ukl_styczn.pdf - Zakład Elektrotechniki i Systemów Pomiarowych, BADANIE STYCZNIKOWO- PRZEKAŹNIKOWYCH UKŁADÓW STEROWANIA.
7. http://www.zue.pwr.wroc.pl/download/lab_urzadzen/23.pdf - Politechnika
Wrocławska Zakład Urządzeń Elektroenergetycznych, Przekaźniki programowalne easy.
17