Silniki krokowe w ofercie TME
Odkrycia fizyków przełomu XVIII i XIX wieku, takich jak Jean Baptiste Biot, Félix Savart czy
André-Marie Ampère dotyczące elektromagnetyzmu, zaowocowały powstaniem wielu
urządzeń pozostających do dziś w powszechnym uŜytku. Jednymi z najbardziej
fascynujących są silniki elektryczne, wśród których szczególną pozycję wyrobiły sobie silniki
krokowe. Bez nich trudno by było wyobrazić sobie współczesny świat.
Najprostszy silnik elektryczny moŜna wykonać przy uŜyciu małego magnesu neodymowego,
bateryjki AAA i odpowiednio ukształtowanej pętli drutu miedzianego. Oczywiście silnik taki
nie ma Ŝadnych cech uŜytkowych, ale właśnie takie najprostsze pomysły często stawały się
zaląŜkami genialnych urządzeń, które później zdominowały wiele dziedzin techniki.
Na przestrzeni lat powstało tak wiele typów silników elektrycznych, Ŝe ich policzenie nie
byłoby obecnie łatwe. Spotykamy je w wielu urządzeniach, często nawet nie zdając sobie
z tego sprawy. Specyficzną grupę stanowią silniki krokowe.
Zasada działania silnika krokowego
Działanie silnika krokowego, jak kaŜdego innego silnika elektrycznego, polega na
wytworzeniu pola magnetycznego, które oddziałując na cewkę uzwojenia powoduje obrót
rotora. W odróŜnieniu od „zwykłych” silników elektrycznych, rotor silnika krokowego po
podaniu impulsu zasilającego wykonuje obrót o ściśle określony kąt. Sposoby zasilania
(sterowania) zaleŜą z kolei od typów silników krokowych, jednak w kaŜdym z nich do
uzyskania ciągłego (ale skokowego) obrotu, konieczne jest podawanie serii impulsów.
Pole magnetyczne niezbędne do pracy silnika krokowego moŜe być wytwarzane kilkoma
sposobami. Do niedawna dość powszechnie były stosowane silniki ze zmienną reluktancją
VM (Variable Magnet), w których pole magnetyczne było wytwarzane przez odpowiednio
skonstruowane cewki nawinięte na nieruchomym stojanie. Obecnie jednym z najczęściej
stosowanych typów silników jest silnik PM (Permanent Magnet), w którym pole magnetyczne
jest wytwarzane przez magnes trwały. Z kolei ten typ silnika jest coraz częściej zastępowany
silnikami hybrydowymi, stanowiącymi poniekąd połączenie idei silników VM i PM,
odznaczającymi się jednak lepszą rozdzielczością, większym momentem i szybkością.
Pojedynczy skok wirnika w większości stosowanych obecnie silników krokowych mieści się
w przedziale od 0,72 do 3,6°.
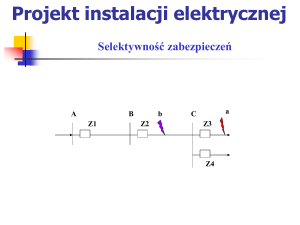
Ze względu na konfigurację uzwojeń silników krokowych, są one dzielone na bipolarne
i unipolarne. W silniku bipolarnym występują dwie odseparowane od siebie cewki
przypadające na jedną fazę pracy, natomiast silnik unipolarny ma jedną cewkę z odczepem
w środku. Spotykane są równieŜ silniki mające po dwie cewki na fazę, i mogą być one
konfigurowane jako unipolarne, bądź bipolarne. Zasadę pracy obu typów silników krokowych
przedstawiono w uproszczeniu na rys. 1.
-1–
Rys. 1
Jak widać, sterowanie silnika bipolarnego jest bardziej skomplikowane, gdyŜ trzeba
zapewnić zmianę kierunku przepływu prądu przez całą cewkę, a to wiąŜe się to
z koniecznością stosowania podwójnego przełącznika (najczęściej realizowanego jako
-2–
mostek tranzystorowy). W kaŜdej fazie pracy prąd płynie przez pełne uzwojenie.
W silniku unipolarnym do sterowania wystarczający jest jeden przełącznik.
Niestety, konsekwencją tego uproszczenia jest przepływ prądu tylko przez połowę uzwojenia
w kaŜdej fazie pracy, co skutkuje wytworzeniem mniejszego momentu.
Mimo dość niewygodnego sterowania silników krokowych, polegającego na sekwencyjnym
podawaniu odpowiednio uformowanych impulsów, silniki te są stosowane w wielu
urządzeniach. Okazują się niezastąpione tam, gdzie jest wymagane bardzo precyzyjne
kontrolowanie ruchu. Jedną z najwaŜniejszych zalet tego typu maszyn jest zachowanie
pełnego momentu obrotowego w kaŜdym cyklu pracy. Jednocześnie, przy odpowiednio
skonstruowanym sterowniku (zliczającym impulsy) zawsze znane jest połoŜenie rotora, nie
są więc wymagane skomplikowane układy słuŜące do jego określania. Wadą silników
krokowych jest trudność w uzyskaniu duŜych prędkości obrotowych, co wynika przede
wszystkim z impulsowej metody zasilania. NaleŜy równieŜ pamiętać o dość szybkim spadku
momentu obrotowego silnika krokowego w funkcji prędkości. W aplikacjach, w których moŜe
to być istotne, naleŜy rozpatrywać moŜliwość stosowania serwomechanizmów zamiast
silników krokowych. Jedną z większych zalet silników krokowych jest natomiast duŜa
trwałość tych elementów, wynikająca z braku szczotek, które jako elementy trące bardzo
szybko ulegają zniszczeniu.
Oferta TME
Oferta TME obejmuje szeroką gamę silników krokowych unipolarnych i bipolarnych
o zróŜnicowanych parametrach elektrycznych i mechanicznych, co znajduje równieŜ swoje
odbicie w cenie. W pierwszej grupie: 39BYGH występują dwa modele oznaczone symbolami
402B i 405B. Są to niewielkie, bipolarne silniki 2-fazowe (fot. 2), które jak na tak niewielkie
wymiary (39×39×34 mm bez ośki) charakteryzują się względnie wysokim momentem
obrotowym.
Rys. 2
NajwaŜniejsze parametry tych silników przedstawiono w tab.1. Uzwojenia zostały
wyprowadzone przewodami o długości 30 cm. Zalecane do tych silników sterowniki to:
SMC50 i SMC81.
Tab. 1. NajwaŜniejsze parametry silników serii 39BYGH
-3–
12
12
12
0,3
0,5
0,4
40
24
30
0,11
0,29
0,21
20
20
20
Waga [kg]
Bezwładność
rotora [gcm2]
obr.
20
45
32
Moment
[Nm]
Indukcyjność
[mH]
Rezystancja [Ω]
Prąd [A]
Napięcie [V]
Krok [°]
Tryb pracy
Model
39BYGH402B bipolarny 1,8
39BYGH402U unipolarny 1,8
39BYGH405B bipolarny 1,8
0,24
0,24
0,24
Drugą grupę silników krokowych stanowią 2-fazowe silniki hybrydowe serii 57BYGH,
do której naleŜy bipolarny 57BYGH804 i unipolarny 57BYGH861 (fot. 3).
Rys. 3
W celu podwyŜszenia momentu obrotowego zastosowano w nich zabieg, polegający
na zwiększeniu średnicy rotora w stosunku do rozwiązań standardowych. Silniki 57BYGH są
zaliczane do urządzeń średnich. Ich najwaŜniejsze parametry przedstawiono w tab. 2.
Zalecane sterowniki to: SMC62, SMC64, SMC116, SMC108, SIC184, SQCA244 oraz
SMC139, gdy konieczne jest uzyskanie duŜej dynamiki. Silniki te są stosowane
w obrabiarkach CNC, ploterach, transporterach itp. Mogą pracować w zakresie temperatury
0...40oC, mają klasę izolacji B.
57BYGH804 bipolarny
57BYGH861 unipolarny
1,8
1,8
3,3
12
3
0,6
-4–
1,1
20
1,20
0,9
440
440
Waga [kg]
Bezwładność
rotora [gcm2]
obr.
1,4
57
Moment
[Nm]
Indukcyjność
[mH]
Rezystancja [Ω]
Prąd [A]
Napięcie [V]
Krok [°]
Tryb pracy
Model
Tab. 2. NajwaŜniejsze parametry silników serii 57BYGH
1,1
0,8
Najliczniejszą grupę wyrobów stanowią 2-fazowe silniki bipolarne serii 103H produkcji
SANYO DENKI. NaleŜą do niej modele o zróŜnicowanej wielkości: 42, 56, 60, 86 i 106 mm,
charakteryzujące się krokiem 1,8°. S ą to silniki stosowane w aplikacjach automatyki
wymagających precyzyjnego pozycjonowania elementów, w maszynach CNC itp.
Najmocniejszy model dostępny w ofercie TME ma moment znamionowy aŜ 19 Nm.
1
1
1
2
2
2
2
6
6
6
6
3,4
66
4,8
1,5
2
1,55
2,4
0,3
0,35
0,45
0,63
6,5
116
9,5
7,5
9,1
5,5
9,5
1,65
2,7
3,4
8
0,265
0,35
0,51
1
1,6
1,37
2,7
2,74
5,09
7,44
19
36
56
74
210
360
400
840
1450
2900
4400
22000
42
42
42
56
56
60
60
86
86
86
106
Waga [kg]
Wymiar
przekroju [mm]
Bezwładność
rotora [gcm2]
znam.
Moment
[Nm]
Indukcyjność
[mH]
24 DC
24 DC
24 DC
24 DC
24 DC
24 DC
24 DC
100 AC
100 AC
100 AC
100 AC
Rezystancja [Ω]
Napięcie [V]
103H5205-5240
103H5208-5240
103H5210-5240
103H7123-5740
103H7126-5740
103H7822-5740
103H7823-5740
103H8221-6240
103H8222-6240
103H8223-6240
103H89223-6341
Prąd [A]
Model
Tab. 3. NajwaŜniejsze parametry silników serii 103H
0,23
0,29
0,37
0,65
0,98
0,77
1,34
1,5
2,5
3,5
10,5
Silniki krokowe znalazły zastosowanie w wielu urządzeniach elektryczno-mechanicznych,
od zegarków analogowych sterowanych cyfrowo, liczników samochodowych, małych
silniczków sterujących głowicami w napędach dysków twardych, CD-ROM-ach, drukarkach
i ploterach, aŜ po duŜe obrabiarki CNC. PodwyŜszenie momentu obrotowego danego
modelu silnika krokowego jest moŜliwe poprzez zastosowanie odpowiednio dobranej
przekładni planetarnej. Jest ona montowana bezpośrednio na silniku krokowym.
Bardzo waŜne dla uzyskania parametrów pracy silnika opisanych w danych katalogowych
jest stosowanie prawidłowo dobranych sterowników, gwarantujących zasilanie silnika
wymaganym napięciem i zapewniającym naleŜytą wydajność prądową. Stosując właściwe
sterowanie silnikami krokowymi (mikrokroki), moŜna uzyskać bardzo precyzyjne ustalanie
połoŜenia rotorów, z rozdzielczością rzędu ułamków stopni kątowych.
-5–