Nr 63
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych
Politechniki Wrocławskiej
Nr 63
Studia i Materiały
Nr 29
2009
modelowanie, dynamika, zakłócenia, zwarcie,
stan nieustalony, system elektroenergetyczny,
sieć zakładowa, program obliczeniowy
Bogusław Karolewski *
TWORZENIE MODELU SIECI ZAKŁADOWEJ W PROGRAMIE
EMTP
Przyjęto przykładowy układ rozbudowanej sieci zakładowej, zasilanej z systemu oraz przez 4
własne generatory. Opisano sposób tworzenia modelu tej sieci z wykorzystaniem pakietu EMTP-RV i
podstawowe zasady posługiwania się programem. Podano przyjęte sposoby modelowania
poszczególnych elementów układu. Przedstawiono uzyskany model całej badanej sieci.
1. WPROWADZENIE
Obliczenia wykonano wykorzystując pakiet EMTP-RV [2], który jest komercyjną
wersją programu EMTP. Wykorzystuje te same modele i mechanizmy, jak bezpłatna
wersja nazywana ATP [1, 4], jednak jest lepiej dopracowany i przyjazny dla
użytkownika. Ma bardziej zwartą budowę. Uproszczono proces przygotowywania
niektórych danych. Ulepszono metody całkowania równań, co ma znaczący wpływ na
działanie programu. Rzadziej występują kłopoty ze stabilnością rozwiązywania
równań. Program w wersji RV umożliwia uwzględnienie większej liczby
rozbudowanych modeli elementów systemu - np. równań obwodowych silników
indukcyjnych. W programie ATP bezpośrednio można było wykorzystać tylko 3 pełne
modele silnika indukcyjnego [3] (choć jest możliwe zwiększenie ich liczby). Program
EMTP-RV umożliwia uwzględnienie wielokrotnie większej liczby takich modeli bez
utraty stabilności rozwiązania.
2. UKŁAD PRZYKŁADOWEJ SIECI
__________
* Politechnika Wrocławska, Instytut Maszyn, Napędów
i Pomiarów
Smoluchowskiego 19, 50-372 Wrocław, [email protected]
Elektrycznych, ul
2
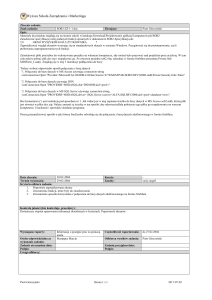
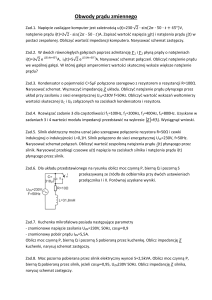
Na rysunku 1 przedstawiono układ linii i transformatorów WN, łączących przyjętą
przykładową sieć dużego zakładu z systemem el-en na poziomie 400 i 220 kV.
Przyjęto wartości mocy zwarciowych w obu stacjach zasilających Szw1 = 22 000 MVA
i Szw2 = 40 000 MVA. Dane autotransformatorów AT1 i AT2 230/110 przyjęto jako:
Uk% = 10,0 %, ∆PCu = 350 kW, a transformatora T-1 400/110: Uk% = 15,5 %, ∆PCu =
950 kW. Wartości te pozwalają wyznaczyć parametry schematów zastępczych
transformatorów, które stanowią dane do obliczeń.
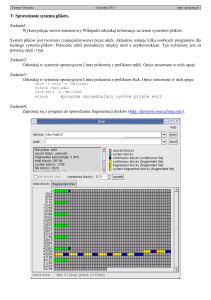
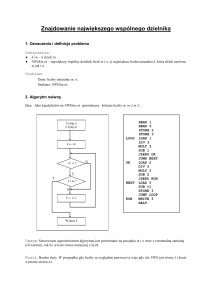
Dalszą część sieci do zamodelowania przedstawiono na rys. 2. Opracowywany
model będzie obejmował połączenie układów z rys. 1 i 2. Sieć wykorzystuje pośredni
poziom napięcia 30 kV. Każda z 4 sekcji głównego punktu zasilającego (GPZ)
zasilana jest poza napięciem systemu również przez własny generator wraz z
transformatorem blokowym 10,5/30 kV. Sekcję A w rozdzielni GPZ-1 oznaczono
symbolem A, sekcję B w GPZ-1 symbolem B, sekcję A w GPZ-2 symbolem C, a
sekcję B w GPZ-2 symbolem D. Te litery A, B, C, D oraz kolejny numer zastosowano
do opisu kolejnych rozdzielni głównych RG, silników (silnik A1, A2, … , A6, B1 –
B7, C1 – C7 i D1 – D6) oraz do opisu transformatorów, kabli, amperomierzy i
woltomierzy związanych z poszczególnymi torami zasilającymi. W przypadku torów
B6 oraz C1 model obejmuje również kable do stacji niższego rzędu, czyli rozdzielni
oddziałowych RO i odbiorniki zasilone z tych stacji. Przykładowo silniki zasilone z
rozdzielni oddziałowych w torze B6 oznaczono numerami B61, B62 i B63.
Obciążenia pozostałych rozdzielni oddziałowych – łączne z odbiornikami n.n.,
uwzględniono powiększając moce zastępczych silników i odbiorników
impedancyjnych, przyłączonych do poszczególnych rozdzielni RG.
Rys. 1. Schemat układu łączącego sieć zakładową z systemem
Fig. 1. Diagram of system connecting the industrial supply network with electric power system
Zastępcze silniki indukcyjne, reprezentujące grupę silników zasilanych za
pośrednictwem danej rozdzielni, mają moce 1, 5 lub 10 MW. Moce te podano na rys
3
2. pod symbolami silników. Modele silników o mocy 2 MW realizowano jako układ
dwu silników po 1 MW. W przypadku pozostałych odbiorników podano pobieraną
moc czynną i pozorną. Sieć pracuje obciążona mocą czynną o wartości około 240
MW (172 MW to silniki, 66,8 MW obciążenie impedancyjne czynne i 33,4 Mvar-a
impedancyjne bierne).
Rys. 2. Schemat zamodelowanej sieci zakładowej
Fig. 2. Diagram of modelling the industrial supply network
4
3. OPIS TWORZENIA MODELU
Przystępując do komputerowej symulacji elektromagnetycznych stanów
przejściowych, całość problemu można podzielić na zadania:
1. Opracowanie modelu
wybór modeli poszczególnych elementów analizowanego układu,
przygotowanie danych,
określenie parametrów symulacji,
wybór wielkości wyjściowych.
2. Wykonanie symulacji
pojedyncza symulacja,
seria symulacji ze zmianą określonych parametrów.
3. Analiza i wykorzystanie wyników
prezentacja wyników w postaci wykresów funkcji w czasie,
analiza wpływu zmian wybranych parametrów czy zakłóceń na uzyskiwane
przebiegi,
interpretacja badanych zagadnień.
Pierwszym problemem do rozwiązania jest dobór właściwych modeli elementów.
Dobór tych modeli zależy od rozmiarów układu do obliczeń i zakresu tych obliczeń.
Np. inne modele są wymagane w przypadku zmian częstotliwości w szerokich
granicach, zaś inne gdy częstotliwość będzie się zmieniała w niewielkim zakresie.
Drugim ważnym zagadnieniem jest skompletowanie wartości parametrów
opisujących modelowane elementy. Następnym etapem jest uruchomienie obliczeń w
prostych układach, pozwalających na sprawdzenie poprawności zachowania
wybranego modelu i wartości jego parametrów oraz korekta tych wartości tak, aby
uzyskać zgodność zachowania modelu z posiadanymi o nim informacjami.
Przykładowo w przypadku transformatora zasila się go ze źródła napięcia i bada
zachowanie na biegu jałowym (czy jest zachowana wartość prądu biegu jałowego i
napięcia w uzwojeniu wtórnym), a następnie obciąża znamionowo i znowu bada się
napięcia i prądy pierwotne i wtórne. Badania takie są szczególnie istotne w przypadku
skomplikowanych modeli, wymagających znajomości wielu, często trudnych do
ścisłego określenia parametrów. W takim przypadku badania mają doprowadzić do
korekty przyjętych wartości tak, aby model zachowywał się poprawnie. Jest to
również okazja do wykrycia nieprawidłowości, których przy tak rozbudowanych
modelach i programie niestety autorom programu nie udało się uniknąć.
Kolejnym etapem jest sformułowanie modelu całego układu. Uruchomienie
takiego modelu daje możliwość prześledzenia współpracy elementów i kolejnej
korekty modeli cząstkowych.
Po uruchomieniu programu i wybraniu nowego projektu (File-New) otwiera się
okno, przeznaczone do budowania schematu. Po prawej stronie dostępna jest
5
biblioteka elementów – z modelami źródeł, gałęzi RLC jednofazowych i
trójfazowych, generatorów, silników, transformatorów, linii, łączników, mierników,
elementów układów sterowania itp. Po wybraniu danego elementu, jego symbol
pojawia się w niewielkim oknie w prawym górnym rogu ekranu. Stamtąd można go
przeciągnąć myszką na pulpit po lewej i łączyć z innymi elementami układu.
Po podwójnym kliknięciu na symbol elementu, pojawia się okno z jego
parametrami. Każdy element ma wczytane dane przykładowe, które można
modyfikować. Kolejne zakładki okna z danymi pozwalają wybrać opcje dotyczące
ewentualnych warunków początkowych, obserwacji czy zapamiętywania wyników
obliczeń przebiegów związanych z tym elementem czy wreszcie wyświetlania
większej lub mniejszej liczby napisów związanych z elementem. Ostatnią opcją okna
z danymi jest HELP – czyli możliwość wyświetlenia pliku z opisem danego elementu
w języku angielskim.
W przypadku konieczności dołączenia elementu jednofazowego (np. woltomierza)
do układu trójfazowego, trzeba na przewodzie kliknąć prawym klawiszem myszy,
wybrać opcję Line type i zmienić charakter przewodu z 3 Phase Signal na 3 Phase
Bus. Do tak przygotowanego miejsca można podłączyć element jednofazowy. Należy
zwrócić uwagę, że w przypadku amperomierzy, włączenie przyrządu w jedną fazę
powoduje zmianę rozpływu prądów – jest modelowana impedancja amperomierza.
Trzeba mierniki włączać we wszystkie fazy, ewentualnie nie zapamiętując wyników z
dwu niepotrzebnych faz.
Po zbudowaniu schematu, należy ustalić warunki symulacji. W górnym menu
wybiera się EMTP – Simulation options. Głównymi parametrami, które trzeba podać
są krok obliczeń, czas trwania symulacji i częstotliwość podstawowa sieci. W
podoknie Adwanced można wybrać metodę całkowania, w opcji Output – co który
wynik zapamiętywać do wydruku (np. co 100), natomiast parametry w oknie Memory
najlepiej pozostawić na typowym poziomie.
Symulację uruchamia się wybierając Start EMTP z górnego Menu. Jeśli obliczenia
przebiegły pomyślnie, wybiera się z menu EMTP – View Scopes, co uruchamia
program do wykreślania wyników. W górnym oknie wybiera się przebiegi do
wizualizacji i przyciskiem Plot Signals powoduje się ich wykreślenie w funkcji czasu.
Należy pamiętać, że wpisując dane do modelu dla oddzielenia części ułamkowej
trzeba się posługiwać kropką, a nie przecinkiem.
Test poprawności działania utworzonego modelu sieci polega na sprawdzeniu czy:
model działa,
wyniki symulacji są zgodne z logiką, a zatem ocenia się przykładowo:
przebiegi prędkości, momentu, prądu i napięcia na zaciskach
ruszającego silnika,
przebiegi mocy pobieranej z systemu i z generatora,
przebieg prądu generatora, jego prędkości, kąta mocy i prądu
wzbudzenia, przebiegi napięć w charakterystycznych punktach układu.
6
4. SPOSOBY MODELOWANIA PODSTAWOWYCH ELEMENTÓW UKŁADU
W celu sprawdzenia poprawności przyjętych danych i zachowania elementów
modelu, wykonano próby modelowania ważniejszych elementów - takich jak
generatory, transformatory czy silniki, pracujących w prostych wyodrębnionych
układach. Postępowanie takie jest niezbędne, gdyż modelowanie stanów
nieustalonych jest na tyle skomplikowane, a stosowane modele wymagają
wprowadzenia dużej liczby często trudnych do określenia parametrów, że samo
wstawienie przyjętych wartości do modelu często nie wystarcza do jego poprawnej
pracy. Na podstawie zachowania urządzenia w prostym układzie można dokonać
wyboru pomiędzy wariantami modelu, skorygować wartości parametrów i upewnić
się czy uzyskiwane wyniki są poprawne.
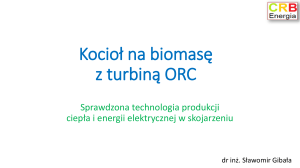
4.1. MODELOWANIE GENERATORÓW
p2
SM1
Out
i(t)
p1
SM
IN
10.5kV
5|5.2|0
+
+
R2 SW2
AVR_Gov_1
v(t)
Są to generatory o mocy pozornej 68,75 MVA i napięciu 10,5 kV. Prąd
znamionowy wynosi 3780 A, napięcie wzbudzenia 81-280 V, a prąd wzbudzenia 234665A. Mechaniczna stała czasowa Tm = 7,6 s, co po przeliczeniu na moment
bezwładności daje 10600 kgm2.
Przyjmując moment bezwładności turbiny jako 0,33 JG, całkowity moment
bezwładności układu wynosi J = 14100 kgm2. Założono sztywność połączenia
pomiędzy turbiną i generatorem, a zatem potraktowano układ jako jednomasowy.
N
obciążenie
Start EMTP
ScopeView
1
100M
R1 +
AVR&Gov 68.75MVA
(pu)
SW1
RL1
+
+
0.2|1E15|0
zwarcie
Rys. 3. Schemat układu do badania modelu generatora
Fig. 3. Diagram of system to generator's model study
Model generatora zasila obciążenie rezystancyjne złożone z trzech rezystorów w
układzie gwiazdowym po R = 4 Ω. Schemat do badania modelu przedstawiono na
rys. 3. Po uruchomieniu modelu, generator pracuje na biegu jałowym. Po 0,2 s
załączane jest obciążenie. W chwili t = 5 s modelowane jest zwarcie na zaciskach
7
generatora przez rezystor 0,5 Ω, które zostaje wyłączone po upływie 0,2 s. Czas
symulacji wynosił 10 s. Wykorzystano blok oznaczony w programie symbolem SM1.
Generator współpracuje z układem regulacji wzbudzenia i turbiny oznaczonym
AVR&Gov.
4.2. MODELOWANIE SILNIKÓW
W przypadku silnika indukcyjnego modelowano jego rozruch. Na podstawie
uzyskanych przebiegów można określić, czy czas rozruchu ma sensowną wartość, czy
krotność prądu rozruchowego i momentu krytycznego są zgodne z oczekiwaniami,
jaki uzyskuje się pobór prądu przy pracy na biegu jałowym, czy po zakończeniu
rozruchu znamionowemu momentowi obciążenia odpowiada znamionowy moment
elektromagnetyczny i znamionowy prąd itp. W zasadzie program EMTP - RV jest
wyposażony w specjalny podprogram, tzw. kalkulator, który pozwala wyznaczyć
parametry schematu zastępczego silnika. Jednak po podstawieniu uzyskanych
wartości parametrów do modelu, często wyniki rozbiegają się lub silnik wcale nie
rusza. Dopiero po odpowiednich korektach udaje się model doprowadzić do logicznie
poprawnego zachowania.
Na rys. 4. przedstawiono model silnika 1 MW i jego główne parametry. Jest to
silnik dwuklatkowy o napięciu 6 kV i prędkości 990 obr/min. Moment bezwładności J
= 200 kgm2 jest sumą momentu bezwładności wirnika i maszyny napędzanej.
Wykorzystano moduł programu oznaczony symbolem ASM1.
T
DEV1
Speed ASM1
Tm
i(t)
ScopeView
ASM
S
10.39kV
1MW
Rys. 4. Schemat układu do badania modelu silnika
Fig. 4. Diagram of system to motor's model study
4.3. MODELOWANIE TRANSFORMATORÓW
6.0kVRMSLL /_0
p1
+
Start EMTP
S
Silnik klatkowy 1 MW, 6 kV, J =200 kgm2, czas rozruchu około 3 s,
obciążenie wg funkcji Mo = 7250*Wr/Ws +2400 przykładane po 0,1s,
moment obciążenia rośnie od 25%Mn do Mn, jako liniowa funkcja prędkości
Ws = 104,7 rad/s, Mn = 9650 Nm, In = 118 A
AC1
8
p4
v(t)
p3
YgD_1
1
2
p2
i(t)
?s
SW1
RL1
+
+
30ms|1000ms|0
117/31.5
R1
115kVRMSLL /_0
?s
Start EMTP
+
100M
p1
i(t)
+
AC1
?s
?s
v(t)
Zachowanie modelu transformatora badano na przykładzie TS-1 o mocy 75 MVA
i grupie połączeń YNd11w układzie modelowym przedstawionym na rys. 5.
Wykorzystano typowy model z biblioteki programu EMTP-RV oznaczony YgD -30.
Transformator pracował przez 30 ms na biegu jałowym a potem, przez zamknięcie
wyłącznika SW1 załączano obciążenie rezystancyjne o wartości 13,23 Ω, które
stanowi obciążenie znamionowe badanego transformatora.
ScopeView
Rys. 5. Schemat układu do badania modelu transformatora
Fig.5. Diagram of system to transformer's model study
4.4. MODELOWANIE SYSTEMU
Do zamodelowania napięcia systemu i jego reaktancji zaplanowano wykorzystanie
modelu oznaczonego symbolem VwZ1 i przedstawionego na rysunku 6.
112kVRMSLL /_0
+
VwZ1
Rys. 6. Schemat układu do badania modelu systemu
Fig. 6. Diagram of system to power system's model study
4.5. MODELOWANIE KABLI
Model linii kablowej typu PI przedstawiono na rys. 7.
PI
1.576 km
4xHAKnY
PI1 3x1x240
+
Rys. 7. Schemat układu do badania modelu kabla
9
Fig. 7. Diagram of system to cable's model study
4.6. MODELOWANIE ODBIORNIKÓW IMPEDANCYJNYCH
LF
Load1
Model odbiornika oznaczony LF przedstawiono na rys. 8. Jego parametrami są
pobierane moce - czynna i bierna - przy czym w danych wpisuje się moce pobierane
przez jedną fazę. Kolejnym parametrem jest napięcie znamionowe, przy którym
odbiornik pobiera podaną moc. Przy zmianach tego napięcia, pobór mocy zmienia się
w funkcji kwadratu napięcia. A zatem, pomimo podawania jako danych mocy
znamionowych, jest to odbiornik o stałej impedancji.
60MW
30MVAR
Rys. 8. Schemat układu do badania modelu odbiornika impedancyjnego
Fig. 8. Diagram of system to receiver's model study
5. MODEL UKŁADU SIECI
Na rys. 9., 10. i 11., przedstawiono kolejne części (strony) modelu sieci
wykonanego z zastosowaniem programu EMTP – RV. Model obejmuje wszystkie
zaplanowane elementy. Pomiędzy poszczególnymi stronami modelu istnieją
połączenia, reprezentowane przez bloczki z napisem Page. Połączenia są
identyfikowane przez nazwę sygnału, podaną przy poszczególnych bloczkach. Model
można w prosty sposób modernizować, uzupełniać i rozbudowywać.
AT1_do_TS3
AT2_do_TS2
T1_do_TS1
100|101|0
+
+
VwZ2
W400
15,960 km
AFL 240
Page
-1|150|0
+
PI
+
2
1
YgYg_np3
-1|150|0
+
400/113.6
+
PI
Page
-1|150|0
+
11.110 km
AFL 240
L_do_TS1
T1
+
Page
-1|150|0
+
10,060 km
AFL 240
L_do_TS2
PI
AT2
System 2
400 kV
L_do_TS4
korektor
+
100M
2
1
YgYg_np2
220/115.9
2
1
YgYg_np1
+
220/115.9
Page
-1|150|0
+
7,036 km
AFL 180 i
1,189 km
AFL 240
L_do_TS3
PI
AT1
400.9kVRMSLL /_0
System 1
220 kV
-1|150|0
+
korektor
+
100M
100|101|0
+
+
VwZ1
216.7kVRMSLL /_0
10
T1_do_TS4
Rys. 9. Strona 1 modelu sieci – zasilanie zakładu z systemu
Fig. 9. The side 1 model of net - the supply industrial plant with power system
44uF
kabelPI K_A6
+
0.2
+ R4
WZ3f sil
Generator
G-1
p_U_G1
R_G1
+
100M
v (t)
v (t)
WG1
p_U_G1_za_wyl
korektor
+
100M
zwarcie
trójfazowe
+
RZ3f 0.2
+
RZ1f
+
0.2
1 00M
korektor
+
korektor
+
100M
Page
A_do_C
Tm
DEV_B2
DEV_B62a
44uF
DEV_B4
440uF
44uF
DEV_B62b
DEV_B63a
Load_B62
44uF
IC
2.380 km
3xXRUHKXS
3x1x240
Load_B5
440uF
0.420 km
3xXRUHKXS
3x1x240
DEV_B5
Load_B4
+
-1|150|0
WS2
0.402 km
4xHAKnY
3x1x240
Wy
i_rms_TS2
+
DEV_TS2
We
1.229 km
2xXnRUHKXS
3x1x300
B
DEV_B61
DEV_B3
220uF
p_U_TS2
p_i_TS2
GPZ-1 sek B 30 kV
Load_B3
korektor
+
100M
1.650 km
2xHAKnFtA
3x1x240
0.410 km
2xXRUHKXS
3x1x240
220uF
123.16/31.5
Load_B2
0.675 km
2xHAKnY
3x1x240
U_rms_S2
We
+
1
YD_B4
i(t)
+
kabel
PI k_B4
2
IC
50Hz
?s PQ
kabel k_B5
PI
2
1
YD_B5
IC
v(t)
p_U_S2
v(t)
kabel
PI k_B3
RG-B4 s. B
31.5/6.6
i(t) 50Hz
?s PQ
PQ_B4
RG-B5 s. B
31.5/6.6
i(t) 50Hz
?s PQ
PQ_B5
30/6.3
i(t) 50Hz
?s PQ
PQ_B6
TS-2
+
YgD_TS2
1
2
Silniki i odbiorniki impedancyjne o napięciu 6 kV
+
p_i_S2
RG-B2 s. B
220uF
kabel
PI k_B1
kabel
PI k_B2
IC
DEV_S2
Load_B1
RG-B130/6.3
s. B
i(t) 50Hz
?s PQ
PQ_B1
i(t)
LF
RG-B2 s. B
31.5/6.3
i(t) 50Hz
?s PQ
PQ_B2
30/6.3
2
1
YgD_B3
IC
LF
Page
v(t)
2MW p_i_B1
1MVAR
LF
RG-B3 s. B
i(t) 50Hz
?s PQ
PQ_B3
p_U_B4
v(t)
4MW p_i_B4
2MVAR
v(t)
4MW p_i_B5
2MVAR
LF
PQ_TS2
kabel
PI k_B6
+
44uF
DEV_B63b
220uF
kabel
PI k_B7
Load_B63
44uF
Generator
G-2
v (t)
R_G2
+
100M
v (t)
korektor
+
100M
p_U_G2
2
1
YgD_TB2
TB-2
WG2
p_U_G2_za_wyl
WSZR
+
2
1
YD_B7
33/10.5
Page
AVR_Gov_G2
IC
p_i_G2
PQ ?s
50Hz
B_do_D
+
Page
100|1000|0
ROsA_do_ROsB
Load_B7
WSB7
0.410 km
3xXRUHKXS
3x1x240
2
1
YD_B6
IC
RG-B7 s. B
30/6.3
i(t) 50Hz
?s PQ
PQm_B7
0.816 km
2xXRUHKXS
3x1x240
DEV_B7
Tm
+
LF
+
0.06|1E15|0
N
1.550 km
3xXRUHKXS
3x1x240
p_U_B1
-1|100|0
+
S
+
Tm
2
1
YD_B1
IC
p_U_B2
-1|100|0
+
S
+
v(t)
2MW p_i_B2
1MVAR
Tm
+
LF
-1|100|0
+
+
2
1
YgD_B2
p_U_B3
-1|100|0
+
S
v(t)
2MW p_i_B3
1MVAR
Tm
S
+
Tm
p_U_B5
-1|100|0
+
S
SpeedASM_B7
p_U_B7
-1|100|0
+
S
v(t)
2MW p_i_B7
1MVAR
PQ_G2 i(t)
IC
SM
10.5kV
68.75MVA
AT2_do_TS2
DEV_B1
ScopeView
TB-1
WZ3f gen
a
+
AVR_Gov_G1
+
zwarcie
WZ1f jednofazowe
440uF
Load_A6
WSA6
Ruszający silnik
440uF
IC
PQ_TS1
1.202 km
4xHAKnY
3x1x240
DEV_A6
220uF
Load_A5
1.780 km
2xHAKnY
3x1x240
+
-1|150|0
DEV_A5
440uF
Load_A4
5.500 km
2xHAKnY
3x1x185
A
Wy
GPZ-1 sek A 30 kV
Load_A3
3.100 km
3xXRUHKXS
3x1x240
korektor
100M+
123.16/31.5
Load_A2
1.480 km
3xK2YRN50
3x1x240
U_rms_S1
We
v(t)
p_U_S1
p_U_TS1
i_rms_TS1
DEV_A4
+
+
+
We
Silniki i odbiorniki impedancyjne o napięciu 6 kV
220uF
kabelPI K_A1
kabelPI K_A2
1
DEV_S1
Load_A1
31.5/6.6
30/6.3
2
v(t)
kabelPI K_A3
+
50Hz
?s PQ
+
pomiar mocy czynnej
i biernej 3 faz
DEV_A3
p_U_A1
RG-A1 s. A
i(t) 50Hz
?s PQ
PQ_A1
IC
1.573 km
4xHAKnY
3x1x240
-1|100|0
+
LF
2
1
YD_A1
RG-A2 s. A
i(t) 50Hz
?s PQ
PQ_A2
30/6.3
2
1
YD_A3
2
1
YgD_A4
30/6.3
kabelPI K_A5
2
1
YgD_A5
WS1
DEV_A2
Tm
S
v(t)
2MW p_i_A1
1MVAR
LF
IC
kabelPI K_A4
IC
Page
ASM
+
Tm
p_U_A2
v(t)
4MW p_i_A2
2MVAR
YD_A2
RG-A3 s. A
i(t) 50Hz
?s PQ
PQ_A3
RG-A4 s. A
30/6.3
i(t)
?s PQ
PQ_A4
IC
31.5/6.6
2
1
YgD_A6
33/10.5
2
1
YgD_TB1
DEV_TS1
DEV_A1
SpeedASM_A1
SpeedASM_A2
IC
-1|100|0
+
S
+
Tm
p_U_A3
v(t)
2MW p_i_A3
1MVAR
LF
p_U_A4
LF
RG-A5 s. A
i(t) 50Hz
?s PQ
PQ_A5
p_i_G1
p_i_TS1
S
10.329kV
5MW
T
ASM
SpeedASM_A3
-1|100|0
+
S
+
Tm
+
v(t)
0.399MWp_i_A4
0.201MVAR
p_U_A5
v(t)
4MW p_i_A5
2MVAR
LF
PQ ?s
50Hz
50Hz
i(t)
S
10.329kV
10MW
T
ASM
SpeedASM_A4
-1|100|0
+
S
+
Tm
RG-A6 s. A
i(t) 50Hz
?s PQ
PQ_A6
IC
+
0.04|1E15|0
N
ASM
YgD_TS1
1
2
S
10.329kV
5MW
T
ASM
Tm
-1|100|0
+
S
SpeedASM_A6
-1|100|0 p_U_A6
ASM S
+
10.39kV
v(t)
4MW +
10MW
p_i_A6
2MVAR -1|100|0
+
LF
korektor
+
100M
SM_G1
Out
PQ_G1 i(t)
IC
SM
10.5kV
68.75MVA
SpeedASM_B1
SpeedASM_B2
ASM
SpeedASM_B3
ASM
ASM
p_i_S1
S
10.329kV
1MW
SpeedASM_A5
ASM
10.329kV
10MW
T
S
10.329kV
5MW
T
S
10.329kV
5MW
T
S
+
Start EMTP
PI
SpeedASM_B4
SpeedASM_B5
ASM
10.329kV
10MW
p_U_B6
T
ASM
PI
T1_do_TS1 i(t)
S
T
kabelk_B61
PI
v(t)
LF
RG-B6 s. B
p_i_B6
+
S
10.329kV
5MW
kabelk_B63
+
pomiar wart. skutecznej prądu
S
T
Tm
-1|100|0
+
S
10.329kV
5MW
T
S
10.329kV
10MW
T
S
kabelk_B62
IN
AVR&Gov
(pu)
T
RO-B61 do B63 s. B
ASM_B61
Speed
ASM
+
+
Tm
+
Tm
-1|100|0
+
S
+
+
1MW
0.501MVAR
Tm
-1|100|0
+
S
Tm
-1|100|0
+
S
korektor
+
100M
SM_G2
Out
pomiar wart. chwilowej prądu
T
ASM_B62a
Speed
-1|100|0
+
S
ASM_B62b
Speed
ASM
ASM_B63a
Speed
ASM
ASM_B63b
Speed
ASM
1MW
0.501MVAR
IN
AVR&Gov
(pu)
pomiar wart. chwilowej napięcia fazowego
S
10.329kV
1MW
T
ASM
10.329kV
1MW
T
S
10.329kV
1MW
T
S
10.329kV
1MW
T
S
10.329kV
1MW
LF
TS-1
S
Rys. 10. Strona 2 modelu – części A i B sieci zakładowej
Fig. 10. The side 2 model of net - A and B parts of supply industrial network
11
ROsA_do_ROsB p_U_C1
RG-C1 s. A
i(t) 50Hz
?s PQ
PQ_C1
IC
30/6.3
kabel
PI k_C1 -1|100|0
+
44uF
DEV_C12a
44uF
DEV_C12b
44uF
DEV_C13b
DEV_C6
Load_C5
440uF
Wy
i_rms_TS3
DEV_TS3
We
0.427 km
4xHAKnY
3x1x240
C
DEV_C5
DEV_C13a
Load_C12
44uF
0.420 km
3xXRUHKXS
3x1x240
DEV_C4
p_U_TS3
Load_C13
44uF
0.410 km
3xXRUHKXS
3x1x240
IC
PQ_TS3
220uF
kabel
PI k_C7
+
Generator
G-3
v (t)
3x1x240
R_G3
3.1 km +
100M
3xXRUHKXS
v (t)
p_U_G3
WG3
DEV_D1
kabel
PI k_D1
DEV_D6
440uF
IC
PQ_TS4
kabel
PI k_D6
G-4
R_G4
+
100M
v (t)
v (t)
korektor
+
100M
p_U_G4
AVR_Gov_4
2
+
1
YD_D6
33/10.5
2
1
YgD_TB4
50Hz
TB-4
WG4
p_U_G4_za_wyl
Generator
Load_D6
WSD6
2.000 km
3xK2YRN50
3x1x240
Load_D5
220uF
Silniki i odbiorniki impedancyjne o napięciu 6 kV
DEV_D5
Load_D4
440uF
+
-1|150|0
WS4
2.940 km
3xXRUHKXS
3x1x240
Wy
i_rms_TS3
DEV_TS1
50Hz
?s PQ
+
We
2.272 km
2xHAKnY
3x1x240
D
DEV_D4
Load_D3
p_U_TS4
p_i_TS4
+
GPZ-2 sek B 30 kV
+
kabel
PI k_D4
i(t)
220uF
korektor
+
100M
1.817 km
4xHAKnY
3x1x240
DEV_D3
Load_D2
440uF
1.049 km
4xHAKnY
3x1x185
U_rms_S4
We
123.16/31.5
TS-4
v(t)
kabel
PI k_D3
31.5/6.3
2
1
YgD_D4
30/6.3
kabel
PI k_D5
2
1
YD_D5
v(t)
p_U_S4
YgD_TS4
1
2
+
1
DEV_S4
DEV_D2
+
kabel
PI k_D2
2
p_i_S4
31.5/6.6
i(t)
Load_D1
44uF
5.150 km
2xHAKnY
3x1x185
Page
B_do_D
Page
T1_do_TS4
30/6.3
Freq
rv rc
czest_D
IC
IC
30/6.3
40/60
IC
31.5/6.6
2
1
YgD_D3
RG-D4 s. B
i(t) 50Hz
?s PQ
PQ_D4
RG-D5 s. B
i(t) 50Hz
?s PQ
PQ_D5
RG-D6 s. B
p_i_G4
?s
Meter
korektor
+
100M
TB-3
?s
p_U_G3_za_wyl
AVR_Gov_3
Load_C7
WSC7
1.868 km
2xHAKnY
3x1x240
DEV_C7
Load_C6
440uF
+
-1|150|0
WS3
50Hz
?s PQ
+
p_i_TS3
GPZ-2 sek A 30 kV
Load_C4
220uF
korektor
+
100M
1.380 km
2xXRUHKXS
3x1x240
Load_C3
220uF
U_rms_S3
1.740 km
3xXRUHKXS
3x1x240
We
123.16/31.5
i(t)
+
+
Freq
v(t)
kabel
PI k_C4
kabel
PI k_C5
v(t)
p_U_S3
YgD_TS3
1
2
+
DEV_S3
DEV_C3
+
kabel
PI k_C3
1
p_i_S3
Silniki i odbiorniki impedancyjne o napięciu 6 kV
kabel
PI k_C2
i(t)
Load_C2
220uF
31.5/6.3
30/6.3
2
30/6.3
2
1
YD_C4
31.5/6.6
2
1
YD_C5
RG-C6 s. A
31.5/6.6
kabel
PI k_C6
2
1
YD_C6
TS-3
IC
IC
IC
1.030 km
2xHAKnY
3x1x240
RG-C2 s. A
i(t) 50Hz
?s PQ
PQ_C2
2
1
YgD_C2
RG-C3 s. A
i(t) 50Hz
?s PQ
PQ_C3
YgD_C3
RG-C4 s. A
i(t) 50Hz
?s PQ
PQ_C4
RG-C5 s. A
i(t) 50Hz
?s PQ
PQ_C5
+
2
1
YD_C1
p_U_C2
LF
LF
LF
LF
Page
-1|100|0
+
v(t)
2MW p_i_C2
1MVAR
p_U_C3
v(t)
2MW p_i_C3
1MVAR
p_U_C4
v(t)
2MW p_i_C4
1MVAR
p_U_C5
v(t)
4MW p_i_C5
2MVAR
p_U_C6
A_do_C
DEV_C2
Tm
S
+
+
IC
Page
ASM
+
Tm
IC
-1|100|0
+
S
+
Tm
-1|100|0
+
S
+
Tm
-1|100|0
+
S
Tm
-1|100|0
+
S
i(t) 50Hz
?s PQ
PQ_C6
WRG-C1
SpeedASM_C2
SpeedASM_C3
ASM
SpeedASM_C4
ASM
SpeedASM_C5
ASM
SpeedASM_C6
ASM
LF
AT1_do_TS3
S
10.329kV
5MW
T
S
10.329kV
5MW
T
S
10.329kV
5MW
T
S
S
+
v(t)
4MW p_i_C6
2MVAR
RG-C7 s. A
30/6.3
2
1
YgD_C7
33/10.5
2
1
YgD_TB3
RG-D1 s. B
i(t) 50Hz
?s PQ
PQ_D1
2
1
YD_D1
RG-D2 s. B
i(t) 50Hz
?s PQ
PQ_D2
YgD_D2
RG-D3 s. B
i(t) 50Hz
?s PQ
PQ_D3
IC
LF
LF
czest_C
p_i_C1
v(t)
+
PIk_C12
+
PIk_C13
kabel
Tm
p_U_C7
p_i_G3
?s
p_U_D1
-1|100|0
+
LF
LF
LF
v(t)
4MW p_i_D4
2MVAR
v(t)
2MW p_i_D5
1MVAR
rv rc
PIk_C11
kabel
T
-1|100|0
+
-1|100|0
+
kabel
LF
+
10.329kV
10MW
T
+
SpeedASM_C7
+
PQ
50Hz
Tm
S
v(t)
0.399MW p_i_D1
0.201MVAR
v(t)
4MW p_i_D2
2MVAR
v(t)
2MW p_i_D3
1MVAR
+
+
+
PQ
40/60
DEV_C11
Tm
+
Tm
S
+
Tm
S
+
1MW
0.501MVAR
Tm
-1|100|0
+
S
Tm
-1|100|0
+
S
10.329kV
10MW
T
-1|100|0
+
S
i(t) 50Hz
?s PQ
PQ_C7
IC
PQ_G3 i(t)
+
0.08|1E15|0
N
ASM
+
Tm
IC
p_U_D2
-1|100|0
+
S
+
Tm
p_U_D3
-1|100|0
+
S
+
Tm
p_U_D4
-1|100|0
+
S
Tm
p_U_D5
-1|100|0
+
S
Tm
p_U_D6
-1|100|0
+
S
i(t) 50Hz
?s PQ
PQ_D6
IC
PQ_G4 i(t)
+
0.1|1E15|0
N
Meter
ASM
ASM
-1|100|0
+
S
ASM_C12a
Speed
ASM_C12b
Speed
ASM_C13a
Speed
ASM
10.329kV
1MW
ASM_C13b
Speed
ASM
LF
ASM
v(t)
2MW p_i_C7
1MVAR
LF
IC
SM
10.5kV
68.75MVA
SpeedASM_D1
SpeedASM_D2
ASM
SpeedASM_D3
ASM
SpeedASM_D4
ASM
SpeedASM_D5
ASM
SpeedASM_D6
ASM
v(t)
4MW p_i_D6
2MVAR
LF
IC
SM
10.5kV
68.75MVA
2.250 km
3xXRUHKXS
3x1x240
SpeedASM_C11
Page
ASM
10.329kV
1MW
T
S
10.329kV
1MW
T
S
10.329kV
1MW
T
S
T
S
10.329kV
1MW
1MW
0.501MVAR
S
10.329kV
5MW
RO-C11 do C13 s. A
korektor
+
100M
SM_G3
Out
IN
AVR&Gov
(pu)
T
S
10.329kV
1MW
T
S
10.329kV
10MW
T
S
10.329kV
5MW
T
S
10.329kV
10MW
T
S
10.329kV
5MW
T
S
10.39kV
10MW
korektor
+
100M
SM_G4
Out
IN
AVR&Gov
(pu)
?s
T
S
Rys. 11. Strona 3 modelu – części C i D sieci zakładowej
Fig. 11. The side 3 model of net - C and D parts of supply industrial network
12
13
6. PODSUMOWANIE
Ważnym etapem wykonania obliczeń przebiegu stanów nieustalonych
występujących w przykładowej sieci zakładowej jest stworzenie modelu tej sieci.
Wykorzystanie
programu
EMTP-RV
umożliwia
zamodelowanie
nawet
rozbudowanych układów sieciowych. Model ma postać pliku komputerowego,
zawierającego implementację przyjętego układu sieciowego wraz z konfiguracją sieci
i danymi elementów. Stosując pakiet EMTP-RV, można ten plik uruchamiać,
korygować i wykorzystywać do dokonywania symulacji różnych przypadków pracy
sieci.
Wyniki przykładowej symulacji pracy sieci przedstawiono w kolejnym artykule.
LITERATURA
[1] ATP-EMTP Rule Book, Canadian/American EMTP User Group, 1987-92
[2] Mahseredijan J., Dewhurst C.: Using EMTP-RV. Hydro-Quebec Canada 2007
[3] Uracz P., Karolewski B.: Modelowanie stanów przejściowych w sieciach energetycznych z
wykorzystaniem programu ATP/EMTP. Pr. Nauk. Inst. Masz., Nap. i Pom. El. PWr 2005, nr 58,
Studia i Materiały nr 25, s. 413-424
[4] . Wiater J.: Kurs praktycznego wykorzystania programu ATP-EMTP. Elektro-Info, kolejne odcinki od
nr 5/2007 (przynajmniej do 6/2009)
USING PROGRAM EMTP TO CREATE THE MODEL OF INDUSTRIAL SUPPLY
NETWORK
The example of industrial network system, supply from system and through 4 own generators was accepted. Creating of this net model from using the packet the EMTP-RV and basic principles of the programme service was described. The received ways of modelling the individual elements of the system
were passed. The model of whole supply net was presented.