ELEKTRYKA
Zeszyt 1 (217)
2011
Rok LVII
Michał GWÓŹDŹ
Instytut Elektrotechniki i Elektroniki Przemysłowej, Politechnika Poznańska
STABILITY OF DISCRETE-TIME SYSTEMS ON BASE
OF GENERALIZED SAMPLING EXPANSION
Summary. Dynamic changes of parameters of energy sources and receivers are
reasons that decrease exactitude of output signals towards reference signals. The
fundamental problem with developing such time-discrete systems, working in closed
feedback loop, is time delay in signal path together with aliasing effects. The paper
presents analysis of work of current regulator with multi-dimensional sampling system on
base of extension of Whittaker-Kotelnikov-Shannon (WKS) sampling theorem. The
regulator is part of wideband power electronics controlled current source.
Keywords: control methods of electrical systems, parallel operation, simulation, small signal models
STABILNOŚĆ SYSTEMÓW DYSKRETNYCH W CZASIE NA BAZIE
ROZSZERZONEJ TEORII PRÓBKOWANIA
Streszczenie. Zadaniem energoelektronicznych układów przekształtnikowych jest
przekształcanie energii elektrycznej pobieranej ze źródła o określonych parametrach na
napięcie lub prąd o parametrach wymaganych przez odbiornik energii elektrycznej.
Występujące tam zjawiska związane z opóźnieniami wnoszonymi przez dyskretną
modulację impulsową oraz efekty nakładania się widm sygnałów muszą być
uwzględniane przy ich projektowaniu w celu zapewnienia ich stabilnej pracy. W artykule
dokonano analizy działania oraz zaprezentowano model matematyczny (sygnałowy)
i symulacyjny energoelektronicznego szerokopasmowego sterowanego źródła prądu
z regulatorem prądu wykorzystującym wielowymiarowy system próbkujący – na bazie
rozszerzenia teorii próbkowania Whittakera-Kotelnikowa-Shannona.
Słowa kluczowe: metody sterowania systemów elektrycznych, działanie równoległe, symulacja,
modele małosygnałowe
1. INTRODUCTION
Dynamic changes of parameters of energy sources and receivers are reasons that decrease
exactitude of output signals towards reference signals. To improve these parameters more
advanced solutions of power electronics systems are necessary [3-8,14,15]. Such systems
30
M. Gwóźdź
should obtain high accuracy of referencing output signal within reference waveform so very
effective control methods are necessary. One of possible solutions is algorithm based on
Generalized Sampling Expansion (GSE) [13]. On base of such extension of WhittakerKotelnikov-Shannon (WKS) sampling theorem, stability of one-dimensional, linear, timevariant system with feedback is analyzed.
2. GENERALIZED SAMPLING EXPANSION
Assume signal xt L2 , the space of square-integrable functions, where - real
numbers domain, and its Fourier transform X j exists. Since the function xt is bandlimited, the support of X j is within the interval MAX ,MAX . The function X j
lies within the space L2 MAX ,MAX and can, therefore, be written in terms of a Fourier
series. Taking into consideration WKS sampling theorem while sampling of xt is uniform
and ideal, it means with utilization of Dirac series
δt nTS , where
n
TS
π
MAX
is the
sampling period, the xt can be reconstructed using inverse Fourier transform formula:
x t
1
2MAX
MAX
xnTS e j t nT d .
S
n
(1)
MAX
A one of major extension of WKS sampling theorem was formulated by Papoulis [13]
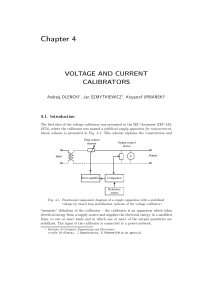
which unifies a broad class of extensions. The general setting is that a signal xt is processed
by a linear Multi-Dimensional Sampling System (MSS). Suppose now that xt is a common
input to M sampling systems, being sub-systems of MSS – Fig. 1.
Fig. 1. Multi-Dimensional Sampling System (MSS)
Rys. 1. Wielowymiarowy system próbkowania (MSS)
Stability of discrete…
31
Each sub-system samples at a rate of
1
times of the Nyquist rate. Assuming individual
M
delays (Fig. 1) i iTS , the y t can be reconstructed using, like previously, inverse Fourier
transform formula:
y t
1
2 MAX
i
i
MAX j t n M MTS
d .
MTS e
x n
M
MAX
M 1
n i 0
(2)
The overall sampling rate still satisfies the Nyquist criterion. Finally, signal y t x t
can be retrieved from extrapolator E on base a sum of xti samples. The MSS, being
consequence of GSE, lets to reduce the required sampling frequency to
1
, comparing to
M
one-dimensional sampling system (WKS sampling theorem).
3. SYSTEM WITH FEEDBACK AND ONE-DIMENSIONAL SAMPLING
Since the sampled function x* t can have not-zero values only in sampling moments
nTS
,
where
n N ,
the
Riemann
integral
within
interval
nTS , nTS :
nTS
xnTS dt 0
for 0 . Thus, the sampled function does not carry any energy and
n nTS
additional module converting sampled function into continuous-time domain is necessary.
Most wide utilized in theory and practice converting module is just 0-order extrapolator in
form of Sample-And-Hold Amplifier (SHA) [1].
The Fourier transform of signal x* t : X * j
xnTS e jnT
S
. The Fourier transform
n
is a trigonometric polynomial and, therefore, periodic in with
2π
. Moreover, it is possible
TS
to relate X * j to X j using the Poisson summation formula, which gives:
X * j
1
TS
2π
X j n .
TS
n
(3)
32
M. Gwóźdź
Assuming now hSHA t is a pulse response, and taking into consideration scale factor
1
TS
in (3), a transfer function of SHA is given by following equation:
H SHA s hSHA t
1
lim
TS ε 0
TS
st
e dt
0
1 1 e sTS
TS
s
s j
e
j
TS
2 Sa TS .
2
(4)
The integral in (4) is improper because of TS is excluded from the sampling interval
0,TS ) .
In fact, relationship between X j and Y j apart static (time invariant) component
(4), contains dynamic (time variant) component
xnTS e jnT
S
yet, so formal transfer
n
function of SHA doesn’t exist [2,10,11]. The dynamic component is related to an aliasing
effects also, by which the high frequency poles are folded back into lower frequencies.
Although respecting the static part only of equivalent transfer function (ETF) of SHA gives,
in most cases of system stability analysis [9], satisfying results, the crucial knowledge is that
the aliasing mechanism can cause loss of stabilization at critical frequencies [2,10].
The equation (4) is valid assuming the SHA works in open loop, that is, feedback has not
an effect. However while feedback is present, respecting (3), equation (4) has to be modified
toward ETF system with feedback. The modification follows a fact that sampling system is a
modulator producing an infinite number of aliases of modulator input signal spectrum in basic
band (3) while modulator input signal is a difference of system input and output signals [5].
In order of stability analysis, system should be more specified, that is, choice of output
circuit configuration is necessary. Thus, further consideration concerns the controlled current
source in form shown on Fig. 2. The general assumption is that this one works with negative
feedback. Regulator (R) of output current iL t consists of SHA and gain block k0 .
Fig. 2. Small-signal model of controlled current source on base of WKS sampling theorem; R is a
regulator block
Rys. 2. Model małosygnałowy sterowanego źródła prądowego na podstawie twierdzenia o próbkowaniu WKS; R to blok regulatora
Stability of discrete…
33
Proposed small-signal (linear) model of such input-output system is one-dimensional,
time-invariant and can be completely described in terms of continuous-time system with
transfer function: G j
I L j
K j
. Stability analysis takes advantage of
U REF j 1 K j
Nyquist criterion [11,12]. Hence, characteristic equation R j 1 K j 0 of model is
as follows:
j nS TS
TS
1
2
R j 1 rCT k0 e
Sa nS
0.
2 j nS L
n
Equation quantities: rCT – gain factor of CT, k0 – regulator gain, S
(5)
2π
– sampling
TS
frequency, L – output inductance (Fig. 2). The function (5) possesses infinity number of
singular points nS .
The Nyquist diagram, on base of equation (5), shown on Fig. 3, concerns following
conditions: rCT =1 V/A, L =5 mH, TS =0,1 ms and k0 =var. This diagram is presented for
several values of k0 . Since (5) is periodic function in with period
consists of infinity number of repetition in intervals: n
2π
, the (P,Q) diagram
TS
2π
2π
,n 1 .
TS
TS
Fig. 3. Nyquist diagram for characteristic equation of small-signal model of current source (WKS)
Rys. 3. Wykres Nyquista dla równania charakterystycznego modelu małosyngałowego źródła
prądowego (WKS)
34
M. Gwóźdź
Is very interesting and crucial for further utilization of (5) determining maximal regulator
gain for DC ( k0 ) up to that system is stable. To determine this value it’s necessary to
determine amplitude of K j for critical phase value argK j π [11,12]. That case
occurs for frequency π
π
. In terms of Nyquist criterion, maximal regulator gain k0 is
TS
given by equation:
K j π
rCT k0 2
L π2
1
1 2n 2
n
rCT k0 2
1
1
1 . (6)
L π 2 n 0 2n 12 n 1 2 n 12
π2
Both of number series within (5) are convergent and the series sum S
. By solving
8
the equation (6), the maximal value of regulator gain k0, MAX and maximal value of effective
system gain ke, MAX are determined as follows:
L
,
rCTTS
(7)
ke, MAX k0, MAX .
(8)
k0, MAX 2
For given hypothetical system parameters ( r =1 V/A,
L =5 mH, TS =0,1 ms):
k 0, MAX 100 , thereby: k e, MAX 100 .
4. SYSTEM WITH OUTPUT QUANTITY REGULATOR BASED ON GSE
In case of real system, implementation of sampling process closed to theoretically
existing MSS (in sense of GSE) with direct summing of xti signals is, in general, very
complicated. Thus, for implementation of GSE in regulator, modification of MSS is
necessary. Within each of sampling sub-system, shown on Fig. 1, the 0-order extrapolator
(SHA) has been placed. Each SHA samples at TS rate with individual i time shift. Order of
MSS is M . Further consideration concerns 2nd order MSS, that is, M =2.
General case of sampling functions, in form of Dirac series, is shown on Fig. 4. Sampling
is uniform one and both of series are shifted each other by 2aTS , where shift factor
1 1
a , . In particular cases: a =0 sampling is 1st order, a 1/4 sampling is 2nd order –
4 4
orthogonal.
Stability of discrete…
35
Fig. 4. Sampling functions for achieving 2nd order MSS
Rys. 4. Funkcje próbkowania do uzyskania MSS 2. rzędu
Formally, sampling functions are given by following equations:
s0 t
s1 t
δt nTS aTS
δt n a TS ,
n
n
δt nTS aTS
n
δt n a TS .
(9)
(10)
n
Like previously, controlled current source has been taken into consideration. The smallsignal model of this one is shown on Fig. 5. Output current regulator is GSE based MSS with
2nd order sampling ( M =2).
Small-signal (linear) model of such system is one-dimensional, time-invariant and can be
completely described in terms of continuous-time system with transfer function
G j
I L j
K j
.
U REF j 1 K j
Fig. 5. Controlled current source with 2nd order MSS based regulator; R is a regulator block
Rys. 5. Sterowane źródło prądu z regulatorem opartym na MSS 2. rzędu, R to blok regulatora
Assuming system works with negative feedback and M =2, a transfer function K j is
given by following equation:
36
M. Gwóźdź
j nS TS
T
1
2 cos n aT Sa n S
K j 2 rCT k 0 e
S
S
S
j n L .(11)
2
S
n
Effective gain ke 2k0 is increased now by 2, comparing to gain of 1st order MSS (5).
The function (11) possesses infinity number of singular points nS .
Stability analysis of small-signal model of current source takes advantage of Nyquist
criterion. Hence, characteristic equation of model is: R j 1 K j 0 .
The Nyquist diagram, on base of equation (11), shown on Fig. 6, concerns following
hypothetical conditions: rCT =1 V/A, L =5 mH, TS =0,1 ms and k0 =60 V/V (effective gain:
ke =120 V/V). Since (11) is periodic function in with period TS , the (P,Q) diagram is also
periodic in intervals: n
2π
2π
,n 1 .
TS
TS
Fig. 6. Nyquist diagram for characteristic equation of small-signal model of current source with MSS
and M =2; k0 =60 V/V
Rys. 6. Wykres Nyquista dla równania charakterystycznego modelu małosygnałowego źródła prądowego z MSS i M =2; k0 =60 V/V
For hypothetical particular gain k0 =60 V/V ( ke =120 V/V) and a =0,10; 0,15; 0,20; 0,25
the (P,Q) phase curve encircles the Nyquist point on the right side what means system is
stable. Characteristic effect of 2nd order sampling is decreasing gain of MSS while frequencies
Stability of discrete…
37
are closed to characteristic point (Nyquist frequency)
. For other ones the gain is
TS
relatively high. Gain minimizing effect is maximal while sampling is orthogonal.
In terms of Nyquist criterion maximal regulator gain, for particular value of a =0,25 , is
given by equation:
K j π
r k 2
2 CT 0 2
L π
1
π
cos 1 2n
1.
4
1 2n 2
n
Number series in equation (12) is convergent and the series sum S
(12)
π2
. By solving the
8
equation (12), the maximal value of regulator gain k0, MAX is determined as follows:
L
,
rCTTS
2k0, MAX .
k0, MAX 2
(13)
ke, MAX
(14)
For given hypothetical system parameters ( rCT =1 V/A, L =5 mH, TS =0,1 ms): k0, MAX
<100 , thereby: ke, MAX <200.
5. SIMULATION MODELLING OF CURRENT SOURCE
For acknowledgment of mathematical and small-signal model considerations, simulation
models of controlled current source with MSS in ORCAD environment have been proposed.
Selected investigation results of these are shown on Fig. 7 and 8 ( rCT =1 V/A, L =5 mH,
TS =0,1 ms).
a)
b)
Fig. 7. Selected waveforms in simulation model of current source; reference signal is rectangular;
ke =60: a) 1st order MSS, b) 2nd order MSS and a =0,25
Rys. 7. Wybrane kształty fal w modelu symulacyjnym źródła prądowego; sygnał referencyjny jest
prostokątny; ke =60: a) MSS 1. rzędu, b) MSS 2. rzędu i a =0,25
38
M. Gwóźdź
a)
b)
b)
Fig. 8. Selected waveforms in simulation model of current source; reference signal is rectangular;
k0 =95: a) 1st order MSS, b) 2nd order MSS and a =0,25
Rys. 8. Wybrane kształty fal w modelu symulacyjnym źródła prądowego; sygnał referencyjny jest
prostokątny; k0 = 95: a) MSS 1. rzędu, b) MSS 2. rzędu i a =0,25
Investigation results show that in both cases of MSS order system is stable but for the
same effective gain (Fig. 7) excitation amplitude of output current is lower while MSS is 2nd
order. Fig. 8 shows output current waveform while system is close to un-stability boundary
k0, MAX =100. Effective gain, while MSS is 2nd order: ke, MAX =190. For that value of ke
system with 1st order MSS would be beyond stability boundary. Results of simulation
modeling of controlled current sources are very close to results of theoretical assumption.
Simulation model investigation results point at fact that 2nd order MSS lets crucially
increase effective system gain, comparing to regulator on base of WKS (or MSS and M =1).
Another advantage of MSS based regulator is better stop-band properties of this at frequencies
closed to Nyquist frequency, what lets more effective minimize aliasing effects.
6. CONCLUSIONS
Presented regulator, working on base of GSE, lets maximize crucially effective system
gain and gives more advantageous transfer function, comparing to standard regulator solution
(WKS sampling theorem). Affecting of aliasing effects on system work is reduced also. As
result, referencing the output quantity waveform within input (reference) signal is much
better, comparing to regulator on base of WKS sampling theorem (MSS 1st order).
It seems necessary to continue investigations of this type of control method. The reason is
their advantages and possibilities of direct implementation in modern control systems with
acceptable today complication of these.
Stability of discrete…
39
BIBLIOGRAPHY
1. Dąbrowski A. (red.) : Przetwarzanie sygnałów przy użyciu procesorów sygnałowych. Wyd. 3,
Wydawnictwo Politechniki Poznańskiej, Poznań 2000.
2. Francis B., Georgiou T.: Stability theory for linear time-invariant plant with periodic digital
controllers. „IEEE transactions on Automatic Control” 1988, Vol. 33, No. 9, p. 820-832.
3. (Handbook style) Gwóźdź M., Porada R.: Compensate for Loading Effects on Power Lines with a
DSP-Controlled Active Shunt Filter. Analog Devices, Inc. “Analog Dialogue” 1999, Vol. 33,
No. 9.
4. Gwóźdź M., Porada R.: Liniowe źródło prądu w generatorze przestrzennego pola magnetycznego.
Mat. XXVIII Międzynarodowej Konferencji z Podstaw Elektrotechniki i Teorii Obwodów,
Gliwice-Wisła, IC-SPETO2005, 26-29 maja 2005, t. 2, s. 329-332.
5. Gwóźdź M.: Impact of Aliasing Effect on Work of Wide Band Power Electronics Current Source.
XIX Symposium Electromagnetic Phenomena in Nonlinear Circuits, Maribor, Słowenia, 2830.06.2006, p. 147-148.
6. Gwóźdź M.: Efektywność poprawy jakości prądu sieci za pomocą energoelektronicznego
kompensatora aktywnego. „Przegląd Elektrotechniczny” 2006, nr 7-8, s. 65-68.
7. Gwóźdź M., Porada R.: Wide-Band Power Electronics Current Source for Reference Purposes.
Proceedings of 12th European Conference on Power Electronics and Applications, EPE2007,
Aalborg, Denmark, 2-5 September 2007, full paper on CD-ROM.
8. Gwóźdź M.: Analiza pracy szerokopasmowych przekształtników energoelektronicznych.
„Przegląd Elektrotechniczny” 2010, nr 12, s. 216-221.
9. Gwóźdź M.: Stability of Discrete-Time Systems on Base of Generalized Sampling Expansion.
Mat. XXXIV Konferencji IC-SPETO 2011, Gliwice-Ustoń, 18-21.05.2011, p. 71-72.
10. Kalman R., Ho B., Narendra K.: Controllability of linear dynamical systems. Contribiutions of
Differential Equations 1963, Vol. 1.
11. Kaczorek T.: Teoria sterowania i systemów. Wyd. Naukowe PWN, Warszawa 1999.
12. Kaczorek T. (red.): Podstawy teorii sterowania. Wyd. II, WNT, Warszawa 2006.
13. Papoulis A.: Generalized Sampling Expansion. „IEEE Transactions on Circuits and Systems”
1977, Vol. 24, Issue 11, p. 652-654.
14. Seliga R., Koczara W.: High Quality Sinusoidal Voltage Inverter for Variable Speed AC Drive
Systems. EPE-PEMC2002, Cavtat & Dubrovnik, 9-11 September 2002.
15. Sieroń A.: Zastosowanie pól magnetycznych w medycynie. Medica Press, Bielsko Biała 2002.
Recenzent: Prof. dr hab. inż. Marian Pasko
Wpłynęło do Redakcji dnia 25 września 2011 r.
40
M. Gwóźdź
Omówienie
Zadaniem energoelektronicznych układów przekształtnikowych jest przekształcanie
energii elektrycznej pobieranej ze źródła o określonych–najczęściej narzuconych parametrach
na napięcie lub prąd o parametrach wymaganych przez odbiornik energii elektrycznej, a także
sterowanie przepływem tej energii. Zgodnie z aktualnymi tendencjami związanymi z zadaniami zapewnienia odpowiedniej jakości energii elektrycznej, przekształtniki nie powinny
zakłócać pracy źródeł energii, pobierając z nich energię tylko o wartości niezbędnej do
wykonania określonej pracy przez odbiornik. Winno być to realizowane za pomocą energetycznych sygnałów napięcia lub prądu, w sposób optymalny ze względu na zadania
wykonywane przez odbiornik. Rozumianym w ten sposób zagadnieniom przekształcania
energii wychodzą naprzeciw energoelektroniczne szerokopasmowe sterowane źródła napięć
i prądów, pracujące głównie jako układy objęte zamkniętą pętlą regulacji wielkości wyjściowej. Zastosowane tam rozwiązania, bazujące na teorii sygnałów, wykorzystują koncepcję
elektrycznych układów czasowo-dyskretnych, sterowanych w systemie MSI przy jednoczesnym zastąpieniu klasycznych regulatorów dyskretnych szerokopasmowymi filtrami
cyfrowymi. Dzięki takiemu podejściu możliwy stał się znaczący wzrost jakości sygnałów
napięcia (prądu) na wyjściu energetycznym (w sensie wierności odwzorowania ich
w sygnałach zadanych), nastąpiło rozszerzenie efektywnego pasma przenoszenia oraz uległ
ograniczeniu, dzięki zastosowaniu na wyjściu energetycznym pasywnych filtrów o charakterze dolnoprzepustowym, poziom emitowanych przez układ zakłóceń elektromagnetycznych.
Natomiast występujące tam zjawiska związane z opóźnieniami wnoszonymi przez dyskretną
modulację impulsową i układ regulacji z jednej strony oraz szerokopasmowy charakter
procesu próbkowania z drugiej, mające niekorzystny wpływ na pracę układów
energoelektronicznych tego typu, muszą być uwzględniane przy projektowaniu ich struktur
elektrycznych oraz algorytmów sterowania w celu zapewnienia stabilnej i wolnej od zakłóceń
pracy.
W artykule dokonano analizy działania oraz zaprezentowano model matematyczny
(sygnałowy) i symulacyjny energoelektronicznego szerokopasmowego sterowanego źródła
prądu z regulatorem prądu wykorzystującym wielowymiarowy system próbkujący – na bazie
rozszerzenia teorii próbkowania Whittakera-Kotelnikowa-Shannona.