Instytut Systemów Elektronicznych PW - Laboratorium Układów i Systemów Elektronicznych
1. PRZEZNACZENIE STABILIZATORÓW
NAJWAŻNIEJSZE PARAMETRY 1
NAPIĘCIA I
ICH
Stabilizator napięcia stałego powinien być źródłem napięcia o możliwie mało
zmieniającej się wartości w różnych warunkach obciążenia, niezbędnego do zasilania
innych układów elektronicznych. Podstawową funkcją stabilizatora jest zmniejszenie
oddziaływania czynników zewnętrznych i wewnętrznych na wartość napięcia wyjściowego.
Poniżej podano podstawowe parametry stabilizatora napięcia oraz typowe warunki
oraz sposób ich pomiaru.
NOMINALNE PARAMETRY STABILIZATORÓW NAPIĘCIA
Stabilizatory napięcia o pracy ciągłej - materiały pomocnicze
Sytuacja, w której z wyjścia stabilizatora jest pobierany prąd I O > IOMAX nazywa się
przeciążeniem stabilizatora a sytuacja gdy IO < IOMIN to jego niedociążenie. Zarówno
w sytuacji przeciążenia, jak i niedociążenia stabilizator, w zależności od jego konstrukcji,
może się zachowywać różnie. Niektóre stabilizatory w stanie przeciążenia lub niedociążenia
"tylko" nie zapewniają na swoim wyjściu oczekiwanego napięcia, inne mogą nawet ulec
uszkodzeniu. Aby temu zapobiec, często stosuje się specjalne zabiegi, które chronią
stabilizator przed zniszczeniem przy obciążeniu prądem innym, niż z prąd nominalnego
zakresu IOMIN ... IOMAX.
Zakres prądów obciążenia powinien być zawsze określany dla najgorszej sytuacji.
Najczęściej jest tak wtedy, kiedy napięcie na wejściu stabilizatora jest najmniejsze
z zakładanego przedziału, czyli gdy jest równe UWEMIN.
Zakres napięć wejściowych
Nominalne napięcie wyjściowe EWY
Jako nominalne napięcie wyjściowe stabilizatora przyjmuje się napięcie mierzone na
wyjściu układu przy ustalonej wartości prądu obciążenia. Najczęściej jest to brak
obciążenia, czyli sytuacja, gdy prąd obciążenia stabilizatora IO = 0.
EWY =U WY I 0=0
W rzeczywistości napięcie na wyjściu stabilizatora nie jest jednak ściśle określone
i w rzeczywistych układach zależy od napięcia na jego wejściu, prądu obciążenia,
temperatury otoczenia, a także od czasu.
W dalszych rozważaniach zostaną pominięte zależności napięcia wyjściowego od
temperatury oraz od czasu, ale należy pamiętać, że w niektórych warunkach te zależności
mogą być bardzo istotne (tak jest np. dla precyzyjnych źródeł napięć odniesienia
w woltomierzach cyfrowych).
Podobnie jak dla zakresu prądów obciążenia, określa się zakres napięć
UWEMIN … UWEMAX na wejściu stabilizatora, przy których powinien on pracować poprawnie.
Przekroczenie tego zakresu nie musi od razu oznaczać zniszczenia układu, ale napięcie na
jego wyjściu może wtedy nie odpowiadać założonemu.
Należy tu zaznaczyć, że zakres napięć wejściowych, dla których stabilizator działa
poprawnie, należy zawsze określać dla największej przewidywanej wartości prądu, która
może być pobierana z wyjścia (czyli dla IOMAX).
Z przedstawionych powyżej rozważań można więc wysnuć ważny wniosek:
najczęściej najbardziej niekorzystnymi warunkami pracy stabilizatora napięcia jest
kombinacja UWEMIN i IOMAX, a więc to dla niej należy projektować układ.
Współczynnik stabilizacji napięcia SU
Ten parametr określa wpływ zmian (wahań lub tętnień) napięcia wejściowego na
napięcie wyjściowe. Współczynnik stabilizacji to stosunek przyrostu napięcia wyjściowego,
jaki pojawia się w odpowiedzi na przyrost napięcia na wejściu stabilizatora:
U WY
U WE
Nominalny (projektowy) zakres prądów obciążenia
SU=
Każdy stabilizator napięcia jest projektowany tak, aby był w stanie dostarczyć do
obciążenia pewien wymagany prąd IOMAX, przy napięciu wyjściowym UWY mieszczącym się
w określonych granicach w stosunku do napięcia nominalnego EWY.
Najczęściej stabilizatory są projektowane w taki sposób, aby można było zupełnie
odłączyć od nich obciążenie, ale zdarzają się też rozwiązania, które dla poprawnego
działania muszą być obciążone prądem nie mniejszym niż IOMIN.
W literaturze można spotkać inne definicje tego parametru, jednak najrozsądniejsze
wydaje się stosowanie definicji podanej wyżej (czyli "im mniej, tym lepiej"). Stabilizator
idealny (niewrażliwy na zmiany napięcia na jego wejściu) ma współczynnik stabilizacji
SU = 0. Ale, jako że w przyrodzie ideałów nie ma, rzeczywiste stabilizatory zawsze mają
SU > 0.
Bardzo proszę o zgłaszanie uwag dotyczących niniejszego tekstu do autora:
Maciej Radtke, pok. 270, lub na adres: [email protected]
1
1
Instytut Systemów Elektronicznych PW - Laboratorium Układów i Systemów Elektronicznych
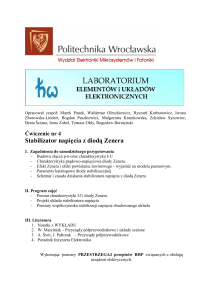
Rezystancja wyjściowa rWY
Im rezystancja wyjściowa
stabilizatora jest mniejsza, tym
jest on bliższy idealnemu źródłu
napięciowemu, a więc "im
mniejsze
rWY,
tym
lepszy
stabilizator". Ilustruje to rys. 1,
na którym stabilizator jest
przedstawiony
jako
układ
zastępczy złożony z idealnego
źródła
napięciowego
EWY
i rezystancji wyjściowej rWY.
rWY
EWY
Powtórzmy jeszcze raz: parametry input regulation i output regulation mówią tylko
o uśrednionym w pewnym zakresie współczynniku stabilizacji oraz rezystancji wyjściowej
i nie oddają lokalnych "zawirowań" (na przykład gwałtownego wzrostu rezystancji
wyjściowej stabilizatora dla małych prądów obciążenia).
Należy tu zwrócić uwagę na jeszcze jeden problem, jaki może się pojawić przy
pomiarze rezystancji wyjściowej stabilizatora napięcia stałego. Jest nim wpływ temperatury
na napięcie wyjściowe stabilizatora. Należy bowiem pamiętać, że w niektórych elementach
stabilizatora napięcia może się wydzielać duża moc, która powoduje nagrzewanie tego
elementu i zmianę jego parametrów. W skrajnym przypadku może się nawet zdarzyć tak, że
zmiana napięcia wyjściowego stabilizatora powodowana zmianą temperatury będzie
większa, niż zmiana napięcia wynikająca z niezerowej rezystancji wyjściowej stabilizatora.
Przykładem stabilizatora, w którym to zjawisko występuje bardzo wyraźnie, jest prosty
stabilizator z diodą Zenera. W takim przypadku pomiaru rezystancji wyjściowej
i współczynnika stabilizacji należy dokonywać impulsowo, przy pomocy skokowo
zmieniających się napięć wejściowych oraz prądów obciążenia. Pomiar statyczny nie
oddaje bowiem rzeczywistych parametrów badanego stabilizatora, a jedynie dostarcza
informację o tym, jak stabilizator zachowa się przy powolnych zmianach prądu obciążenia
albo napięcia na jego wejściu.
IO
obciążenie
UWY
stabilizator
W takim układzie definicja rWY
jest następująca:
Rys. 1: Schemat zastępczy wyjścia stabilizatora
Δ U WY
Δ IO
| |
r WY =
Stabilizatory napięcia o pracy ciągłej - materiały pomocnicze
A więc napięcie na wyjściu stabilizatora obciążonego prądem IO jest równe:
PARAMETRY GRANICZNE STABILIZATORÓW NAPIĘCIA
U WY =EWY −I O⋅r WY
Oprócz parametrów nominalnych definiuje się także tzw. parametry graniczne. Mówią
one o tym, w jakich warunkach (zasilania, prądu obciążenia) stabilizator przestaje pracować
poprawnie albo wręcz ulega zniszczeniu (to drugie ograniczenie jest w katalogach
opisywane jako absolute maximum ratings)
Oczywiście dla IO = 0, UWY = EWY
Pomiary SU i rWY
Minimalne (UWE(MIN)) i maksymalne (UWE(MAX)) napięcie wejściowe
Formalnie rWY i SU są wielkościami różniczkowymi, czyli stycznymi do charakterystyk
UWY(UWE) i UWY(IO) - a więc zdefiniowanymi dla bardzo małych przyrostów mierzonych
wielkości. Jednak bardzo często oba parametry są tak małe, że pomiar niewielkich zmian
napięcia wyjściowego dla małych zmian UWE albo IO jest bardzo trudny lub wręcz
niemożliwy. Wtedy mierzy się zmianę napięcia wyjściowego dla dużych zmian U WE i IO,
a następnie określa się SU i rWY wielkoprzyrostowo. W ten sposób uzyskuje się co prawda
dane uśrednione, ale i tak są one lepsze niż żadne, albo obarczone błędem na poziomie np.
kilkudziesięciu procent.
W katalogowych opisach gotowych stabilizatorów często znajdziemy też następujące
parametry:
input regulation - jest to zmiana napięcia na wyjściu przy zmianie UWE o np. kilka woltów,
output regulation - jest to zmiana napięcia wyjściowego przy zmianie prądu obciążenia od
IO = 0 np. do wartości maksymalnej (lub innej, określonej w katalogu).
2
Napięcie UWE(MIN) to najmniejsze napięcie wejściowe, przy którym stabilizator może
jeszcze poprawnie działać. Aby taka definicja była jednoznaczna, należy ustalić kryterium
poprawnego działania. Najczęściej jest to możliwość uzyskania napięcia U WY z określoną
dokładnością (np. z błędem mniejszym niż <ileś> %)2.
Oprócz parametru UWE(MIN) bardzo często podaje się napięcie U DR (drop-out voltage),
czyli minimalne napięcie między wejściem a wyjściem stabilizatora, przy którym pracuje
on zgodnie z założeniami. Na ogół uważa się, że im mniejsza wartość U DR tym stabilizator
jest lepszy, gdyż przekłada się to na możliwość wydzielania mniejszej mocy w jego
Z praktycznego punktu widzenia najsensowniejsze jest określanie U WE(MIN) i UDR dla
maksymalnego założonego prądu IOMAX, jaki będzie pobierany z wyjścia – bo przecież
zadaniem stabilizatora jest utrzymanie przewidywanego (projektowego) napięcia
wyjściowego nawet w najgorszych warunkach, a więc także w takich, kiedy będzie on
najbardziej obciążony.
2
Instytut Systemów Elektronicznych PW - Laboratorium Układów i Systemów Elektronicznych
elementach (co oznacza większą sprawność energetyczną układu), oraz na większy
dopuszczalny zakres zmian napięcia wejściowego.
Oba parametry (UWE(MIN) i UDR) nie są tożsame ani bezpośrednio wzajemnie wymienne.
Można sobie wyobrazić stabilizator, który co prawda jeszcze działa poprawnie przy bardzo
niewielkiej różnicy napięć pomiędzy swoim wejściem i wyjściem (np. 1 V), ale i tak
przestaje działać, gdy napięcie na jego wejściu spadnie poniżej pewnej bezwzględnej
wartości (np. 10 V). Pomimo małej wartości UDR, na wyjściu takiego stabilizatora nie da się
uzyskać napięcia np. 5 V przy napięciu wejściowym 6 V, bowiem do wejścia tego
stabilizatora zawsze trzeba doprowadzić co najmniej 10 V. A więc opisanych warunkach
realny drop-out opisanego stabilizatora to już nie 1V, a aż 5V. Z kolei, jeśli zechcemy w tym
samym układzie uzyskać napięcie wyjściowe U O = 11 V, wystarczy go zasilić napięciem
wejściowym UWE = 12 V.
Napięcie UWE(MAX) to jest najczęściej napięcie, powyżej którego stabilizator może ulec
uszkodzeniu.
Maksymalny dopuszczalny prąd wyjściowy obciążenia IO(MAX)
Prąd, jakim zostanie obciążony stabilizator, nie może być dowolnie duży. Nadmierne
obciążenie stabilizatora może mieć rozmaite skutki, w zależności od jego konstrukcji.
Na przykład po przekroczeniu IO(MAX) prosty układ z diodą Zenera i opornikiem
przestanie poprawnie stabilizować, ale nie nastąpi uszkodzenie diody (może natomiast ulec
uszkodzeniu opornik zasilający diodę). W takim stabilizatorze za I O(MAX) uznaje się taki prąd
IO, powyżej którego układ nie wytwarza na wyjściu pożądanego napięcia albo następuje
gwałtowne pogorszenie współczynnika stabilizacji lub zwiększenie rezystancji wyjściowej.
Można też spojrzeć inaczej i powiedzieć, że I O(MAX) to taki prąd, powyżej którego
gwałtownie wzrasta rezystancja wyjściowa stabilizatora. W innych stabilizatorach
przekroczenie prądu IO(MAX) grozi zniszczeniem któregoś z jego elementów (tak jest np. dla
najprostszych stabilizatorów z wtórnikiem emiterowym). Dla takich układów za I O(MAX)
przyjmujemy największą wartość prądu, dla którego stabilizator może pracować bez
narażenia na zniszczenie któregokolwiek z elementów (ale oczywiście i tak zawsze musi
być spełniony warunek podstawowy: stabilizator musi spełniać nałożone wymagania –
w najgorszej sytuacji dostarczać do obciążenia co najmniej wymagany prąd I OMAX,
oczywiście przy zachowaniu założonego napięcia wyjściowego).
3
Stabilizatory napięcia o pracy ciągłej - materiały pomocnicze
Instytut Systemów Elektronicznych PW - Laboratorium Układów i Systemów Elektronicznych
2. OPISY PODSTAWOWYCH UKŁADÓW STABILIZATORÓW
NAPIĘCIA
Stabilizatory napięcia o pracy ciągłej - materiały pomocnicze
najmniejsze przewidywane napięcie zasilania U WEMIN, napięcie nominalne diody UZN
i największy przewidywany prąd obciążenia stabilizatora IOMAX, to rezystancja opornika R1
musi spełniać warunek:
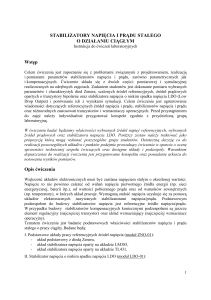
2. 1. Stabilizator z diodą Zenera
Najprostszy
układ
stabilizatora
z diodą Zenera przedstawiono na rys. 2.
Obciążenie jest zasilane przez opornik R 1
oraz, dołączoną równolegle do obciążenia,
diodę Zenera DZ. W stabilizatorze
wykorzystuje się to, że napięcie przebicia
diody Zenera UZN mało zależy od prądu
płynącego przez diodę Zenera (rys. 3).
Przy zmianach napięcia UWE bądź prądu IO Rys. 2: Stabilizator z diodą Zenera
zmienia się prąd diody IZ, a jednocześnie
napięcie UWY pozostaje prawie stałe
i bliskie napięciu przebicia diody UZN3.
Podstawowe parametry tego typu stabilizatora zależą przede wszystkim od
właściwości diody (np. UWY ≈ UZN). Należy jednak pamiętać, że diody Zenera mają
określone rozrzuty parametrów. Tolerancja napięcia przebicia najbardziej typowych diod
Zenera, oznaczonych literą C, jest równa 5%.
Minimalny prąd diody Zenera
R1≤R1 MAX =
U WEMIN −U ZN
I ZN + I OMAX
Współczynnik stabilizacji SU
Współczynnik stabilizacji układu z diodą Zenera
rWY IO
R1
określają własności zastosowanej diody.
Schemat zastępczy układu z prostym liniowym
modelem diody Zenera (oczywiście słusznym tylko
w zakresie przebicia) jest pokazany na rys. 4. Źródło
rDZ
UWE
UWY
napięciowe UZN0 odtwarza napięcie nominalne diody
Zenera, a rezystor rDZ - rezystancję dynamiczną tej
UZN0
diody. Jeśli napięcie na wejściu układu zmieni się
DZ1
o ΔUWE, a prąd IO się prawie nie zmieni (czyli
założymy, że przyrost napięcia wejściowego jest mały),
U ZN 0 U ZN I ZN rDZ
to na wyjściu zaobserwujemy następującą zmianę
Rys. 4: Schemat zastępczy układu
napięcia:
z diodą Zenera
r
Δ U WY =Δ U WE⋅ DZ
r DZ + R 1
Przewodzenie
Producenci diod Zenera podają
w katalogach minimalny prąd potrzebny do
ID
Przebicie
poprawnej stabilizacji napięcia, nazywany
Zatkanie
prądem nominalnym IZN. Przy tym prądzie
UZN
mierzy się nominalne napięcie stabilizacji
UD
UZN oraz rezystancję dynamiczną diody rDZ.
IZN
IZN należy więc rozumieć jako taką
wartość prądu przepływającego przez
przebitą diodę Zenera, poniżej której
producent nie bierze odpowiedzialności ani
za napięcie stabilizacji, ani za rezystancję
diody. Dla większości diod Zenera małej
mocy za prąd nominalny przyjmuje się
prąd IZN = 5 mA, tak jest też w przypadku
IDMAX
diod używanych w ćwiczeniu.
PDMAX
Ze sposobu określenia prądu IZN
wynika sposób projektowania stabilizatora Rys. 3: Charakterystyka diody Zenera
z diodą Zenera. Jeśli są znane dane:
Stąd można obliczyć współczynnik stabilizacji SU układu z diodą Zenera, który jest równy:
Zakres stabilizacji
SU=
Δ U WY
r
= DZ
ΔU WE r DZ + R1
Należy przy tym pamiętać, że rezystancja dynamiczna r DZ jest podawana w katalogach
producentów diod Zenera dla prądu nominalnego (5 mA). Przy większym prądzie
rezystancja rDZ maleje, a więc współczynnik stabilizacji ulega poprawie. Typowa wartość
rezystancji rDZ wynosi od kilku do kilkudziesięciu omów, jednak może mieć ona bardzo
duży rozrzut pomiędzy poszczególnymi egzemplarzami diod (rozrzut r DZ może sięgać nawet
kilkudziesięciu procent).
Przy UWE < UZN dioda nie ulega przebiciu i napięcie na wyjściu nie jest równe UZN!
3
4
Instytut Systemów Elektronicznych PW - Laboratorium Układów i Systemów Elektronicznych
Stabilizatory napięcia o pracy ciągłej - materiały pomocnicze
temperaturowe, powoduje to termiczną – a więc o dość długim czasie ustalania się – zmianę
napięcia UZN.
Rezystancja wyjściowa rWY układu z diodą Zenera
Z rys. 4 wynika, że rezystancja wyjściowa, "widziana" od strony napięcia U WY, to:
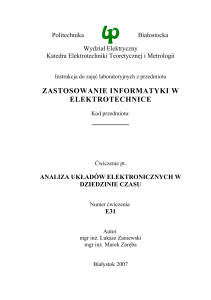
2. 2 Stabilizator z wtórnikiem emiterowym
r WY =R1‖r DZ
Warto jeszcze raz podkreślić, że obliczenie rWY, takie, jak w powyższym równaniu, jest
sensowne tylko wtedy, gdy dioda Zenera jest w stanie przebicia. Gdy dioda nie przewodzi
prądu, jej rezystancja jest bardzo duża i wówczas rezystancja wyjściowa układu jest równa
R1. Najczęściej jest ona wtedy zbyt duża w stosunku do potrzeb zasilanego obwodu.
W przypadku współczesnych diod najczęściej rezystancja R1 jest wyraźnie większa od
rDZ, dlatego oporność wyjściowa poprawnie działającego stabilizatora z diodą Zenera jest
zwykle bliska rezystancji rDZ.
Dopuszczalny prąd maksymalny diody Zenera
Producenci diod Zenera nie podają w danych katalogowych dopuszczalnego prądu
maksymalnego diody, natomiast w zamian podają maksymalną dopuszczalną moc strat
w diodzie. Dlatego maksymalną wartość prądu konkretnej diody należy obliczyć jako iloraz
dopuszczalnej mocy strat i napięcia przebicia diody. Na przykład dla diody BZX55-C6V2
o napięciu UZN = 6,2 V i podanej w katalogu mocy dopuszczalnej PMAX = 0,5 W,
maksymalna wartość prądu diody Zenera jest równa4:
I DMAX≈ P MAX /U ZN =0,5 W / 6,2 V =80,5 mA
W tym układzie:
I B 1=
Przy projektowaniu stabilizatora prąd IDMAX rzutuje na najmniejszą wartość R1, która
może być użyta bez obawy o zniszczenie diody. Oczywiście należy ją obliczać dla
największej przewidywanej wartości napięcia wejściowego U WEMAX i dla przewidywanego
najmniejszego prądu IOMIN, jaki będzie pobierany z wyjścia projektowanego stabilizatora5:
R1≥R1 MIN =
Prosty
stabilizator
z diodą
Zenera
bywa
uzupełniany
wtórnikiem
emiterowym (rys. 5). Dzięki
zastosowaniu
wtórnika
wyraźnie
wzrasta
obciążalność układu, czyli
największy prąd IO, jaki
można z niego pobrać.
Wtórnik emiterowy niejako
"odciąża" diodę Zenera,
a prąd
do
wyjścia
stabilizatora płynie - przez
tranzystor - głównie ze
źródła
napięcia
wejściowego.
Rys. 5: Stabilizator z wtórnikiem emiterowym
U WEMAX −U ZN
I DMAX + I OMIN
Przy tej okazji warto wspomnieć, że gdy prąd płynący przez diodę rośnie, wzrasta
również jej temperatura. Ponieważ diody Zenera mają niezerowe współczynniki
4
Ze względu na występowanie rezystancji szeregowej diody r DZ, na której przy większych
prądach IDZ odkłada się znaczące napięcie (dla dużych prądów I DZ napięcie na diodzie
Zenera jest większe od nominalnego), dopuszczalny prąd I DZMAX jest tak naprawdę
mniejszy od wyżej wyliczonego (dlatego w wyrażeniu został użyty znak ≈).
5
W takich warunkach przez diodę Zenera przepływa największy prąd. Najczęściej
przyjmuje się, że IOMIN = 0.
5
I E1 I O+ I R E I O+ I R E
=
≈ β
β1 +1
β1+1
1
oraz, jeśli zostaną zaniedbane ewentualne zmiany napięcia UWE:
I B 1+ I Z =I R 2≈const .
a więc zwiększenie prądu obciążenia IO powoduje w przybliżeniu zmniejszenie prądu diody
Zenera DZ1 tylko o tyle, o ile wzrasta prąd bazy I B1 tranzystora T1. Pozwala to na użycie
opornika R2 o większej rezystancji niż rezystancja opornika R 1 w poprzednim układzie
z diodą Zenera (dla takiego samego przewidywanego zakresu prądów obciążenia).
Instytut Systemów Elektronicznych PW - Laboratorium Układów i Systemów Elektronicznych
Napięcie wyjściowe stabilizatora z wtórnikiem emiterowym jest równe 6:
Stabilizatory napięcia o pracy ciągłej - materiały pomocnicze
układu z diodą Zenera. Jednak w tym układzie prąd obciążenia jest pobierany poprzez
tranzystor wprost z zasilania i dzięki temu obwód diody Zenera może być odciążony.
Można więc, przy takim samym jak w najprostszym układzie z diodą Zenera prądzie I OMAX),
zastosować opornik R2 o wyraźnie większej rezystancji i w ten sposób wydatnie poprawić
współczynnik stabilizacji.
U WY =U ZN −U BEP 1
Rezystancja wyjściowa stabilizatora z wtórnikiem emiterowym
Na rezystancję wyjściową wtórnika emiterowego składają się: przetransformowana
oporność obwodu dołączonego do bazy wtórnika oraz oporność wyjściowa samego
tranzystora, czyli rezystancja oznaczana w modelu tranzystora jako r eb’ (reb’ = ΦT / IE):
r WY =r eb ' +
r DZ‖R 2
r DZ
≈r eb' +
β1
β1
Dla małych prądów emitera oporność reb' może być dużo większa od rDZ/β, więc aby
uniknąć dużych wartości rWY, dla małych prądów obciążenia stosuje się zwykle
"dociążający" opornik RE. Użycie opornika RE sprawia, że prąd emitera płynie nawet wtedy,
gdy do obciążenia nie płynie żaden prąd, albo gdy ten prąd jest znikomo mały. Dzięki temu
oporność wyjściowa rWY nigdy nie przyjmuje bardzo dużych wartości7.
Reasumując, można zauważyć, że jeśli prąd emitera jest mały, w rezystancji
wyjściowej stabilizatora z wtórnikiem najczęściej dominuje wpływ oporności r eb', natomiast
dla dużych prądów wyjściowych znaczenie r eb' maleje i decydujące znaczenie zaczyna mieć
przetransformowana oporność obwodu bazy8.
Zalety, wady i zastosowania układu z wtórnikiem emiterowym
Niewątpliwymi zaletami układu z wtórnikiem są: prostota i możliwość obciążania go
stosunkowo dużym prądem (w porównaniu z najprostszym układem z diodą Zenera).
Wady stabilizatora z wtórnikiem emiterowym to: możliwość uszkodzenia tranzystora
przy nadmiernym obciążeniu oraz zbyt duża dla niektórych zastosowań rezystancja
wyjściowa (nawet przy zapewnieniu wstępnego prądu IRE). Dodatkową wadą stabilizatora
z wtórnikiem emiterowym może być też dość znaczny drop-out układu, wynikający z samej
zasady działania obwodu z diodą Zenera.
Stabilizacja napięcia w układzie z wtórnikiem emiterowym jest przeciętna, podobna
jak w przypadku poprzedniego stabilizatora. Istnieje jednak możliwość jej poprawy poprzez
użycie większej wartości opornika R2.
Układ z wtórnikiem jest dość często stosowany do zasilania takich układów, które
dobrze tolerują niezbyt dokładne napięcie zasilające. Sprawdza się w zakresie małych
i średnich prądów - najczęściej wtedy, gdy prąd obciążenia nie przekracza kilkuset mA.
2.3. Stabilizator z pętlą ujemnego sprzężenia zwrotnego
Współczynnik stabilizacji
Łatwo zauważyć, że wpływ zmian napięcia wejściowego U WE na obwód z diodą
Zenera i z wtórnikiem emiterowym jest taki sam, jak w układzie poprzednim. S U układu
z wtórnikiem emiterowym można opisać wzorem takim samym jak dla najprostszego
Warto tu przypomnieć, że napięcie UBEP, które w układach pracujących przy niewielkich
prądach jest często przybliżane jako 0,7 V, w rzeczywistości nie ma ono stałej wartości
i zmienia się wraz z prądem płynącym przez emiter tranzystora. W układach zasilających
jest to o tyle istotne, że zmiany prądu emitera tranzystora użytego jako wtórnik emiterowy
są nierzadko ogromne - np. od 0 do kilku amperów. U BEP może się więc zmieniać od prawie
zera do nawet pojedynczych woltów!
7
Formalnie w skład rezystancji wyjściowej wchodzi też opornik R E, ale jego rezystancja
jest prawie zawsze dużo większa niż rezystancja pozostałych składników i może być
pominięta.
8
W przypadku obciążenia tego typu stabilizatora bardzo dużym prądem I O, na rezystancję
wyjściową ma również wpływ rezystancja rozproszona bazy tranzystora r bb' (jest ona
włączona w szereg z rDZ||R2), przetransformowana do obwodu emitera. W ćwiczeniu to
zjawisko nie jest rozpatrywane.
6
6
Ten rodzaj stabilizatora, o uproszczonym
schemacie pokazanym na rys. 6, umożliwia
budowanie źródeł napięcia zasilającego o dużej
dokładności i stabilności oraz o bardzo małej
rezystancji wyjściowej 9, czyli o znikomej
wrażliwości napięcia wyjściowego na wartość
prądu pobieranego z wyjścia zasilacza.
Wzmacniacz błędu (wzmacniacz o wejściu
różnicowym i sporym wzmocnieniu) "stara się"
ustawić takie napięcie na bazie tranzystora T
(wtórnika
emiterowego),
żeby
różnica
potencjałów pomiędzy jego wejściami była bliska
zera, czyli by napięcie U na wejściu Rys. 6: Stabilizator ze szprzężeniem
zwrotnym
9
Jeśli nie wiesz, dlaczego ujemne sprzężenie zwrotne zmniejsza rezystancję wyjściową,
zapytaj krasnoludka Leona - dodatek.
Instytut Systemów Elektronicznych PW - Laboratorium Układów i Systemów Elektronicznych
odwracającym było bardzo bliskie napięciu referencyjnemu (odniesienia) U REF. W ten
sposób napięcie wyjściowe jest równe:
R +R
U WY =U REF⋅ 1 2
R2
Jest to prawda przy założeniu, że wzmacniacz błędu jest idealny i nie pobiera na
swoich wejściach żadnego prądu. W rzeczywistości tak nie jest 10, więc na wejściu
nieodwracającym często stosuje się dodatkowy opornik zmniejszający znaczenie
niezerowych prądów wejściowych. Ten opornik powinien mieć rezystancję R3 = R1||R2.
Szczególnym przypadkiem jest sytuacja, kiedy opornika R 2 w ogóle nie ma, a R1 = 0
i wyjście stabilizatora jest dołączone bezpośrednio do odwracającego wejścia wzmacniacza
błędu. Wtedy UWY = UREF.
Jako źródło napięcia UREF bardzo rzadko stosuje się diody Zenera. Najczęściej są to
rozbudowane układy, zapewniające dużą stabilność temperaturową napięcia odniesienia,
a także jego odporność na zmiany napięcia zasilania (źródło odniesienia musi być zasilane
z niestabilizowanego napięcia UWE). Ta odporność jest bardzo często głównym
wyznacznikiem wartości współczynnika stabilizacji, przez co wyliczenie go przy pomocy
prostych zależności jest bardzo trudne lub wręcz niemożliwe. Jeśli jednak zostanie
zastosowana dioda Zenera, współczynnik stabilizacji jest identyczny, jak w poprzednich
układach (przy „pełnym” sprzężeniu zwrotnym, gdy UO = UZ) albo wręcz gorszy (przy
zastosowaniu oporników R1 i R2, czyli UO > UZ).
10
Wzmacniacze błędu w stabilizatorach napięcia często mają prądy wejściowe o wiele
większe niż typowe wzmacniacze operacyjne.
7
Stabilizatory napięcia o pracy ciągłej - materiały pomocnicze
Instytut Systemów Elektronicznych PW - Laboratorium Układów i Systemów Elektronicznych
Dodatek: Krasnoludek Leon stosuje sprzężenie zwrotne i poprawia parametry
stabilizatora
Spójrzmy na rysunek:
Stabilizatory napięcia o pracy ciągłej - materiały pomocnicze
w przybliżeniu stałe (UBEP), dokładnie o tyle samo podnosi się potencjał na "lewej
końcówce" rezystancji rWY.
W tym momencie mamy już komplet informacji o występujących w układzie
zmianach i od opisu jakościowego możemy przejść do ilościowego:
1. Na "lewej końcówce" rWY potencjał wzrósł o K • ΔU (skutek działalności krasnoludka)
2. Na "prawej" końcówce rWY potencjał spadł o ΔUWY (skutek wzrostu prądu IO)
3. Zmiana potencjału na wejściu odwracającym wzmacniacza: ΔU = ΔUWY • R2 / (R1 + R2).
4. Napięcie, które pojawiło się na rWY, to różnica potencjałów na jej "lewej" (potencjał
w górę) i "prawej" (potencjał w dół) końcówce, czyli ΔUrWY = K • ΔU + ΔUWY.
5. Ale też (z prawa Ohma): ΔUrWY = ΔIO • rWY14.
Ufff...
Podsumujmy, czyli zapiszmy układ równań, a następnie przekształćmy wzory:
Przedstawia on sytuację, w której stabilizator napięcia o rezystancji wyjściowej r WY11
został objęty pętlą sprzężenia zwrotnego 12. Wewnątrz tzw. wzmacniacza błędu siedzi
złośliwy krasnoludek Leon, który jest przekorny i działa na zasadzie "jak oni w dół, to ja
w górę", i odwrotnie. Do kompletu złośliwość krasnoludka sprawia, że akcja nie jest równa
reakcji i "jego w górę" jest K-krotnie (K to oczywiście współczynnik krasnoludka, zwany
potocznie wzmocnieniem) większe, niż "ich w dół". Obserwuje więc nasz krasnoludek
różnicę potencjałów (napięcie) pomiędzy zaciskami wejściowymi wzmacniacza błędu
i zmienia potencjał na wyjściu tego wzmacniacza K razy silniej niż zaobserwowana zmiana
na wejściu, a do tego w przeciwną stronę.
Zobaczmy, jakie to ma skutki. Jeśli prąd pobierany z wyjścia stabilizatora zostanie
nagle zwiększony o ΔIO, wywoła to pojawienie się spadku napięcia na rezystancji
wyjściowej rWY. Nietrudno zauważyć, że skutkiem będzie spadek się napięcia U WY o pewną
(na razie nieznaną) wartość, równą ΔUWY. Inaczej mówiąc, potencjał "prawej końcówki"
oporności rWY spadnie o taką właśnie wartość. Potencjał odwracającego wejścia
wzmacniacza błędu obniży się więc o wartość wynikającą z podziału ΔUWY w dzielniku
napięciowym, czyli o ΔU = ΔUWY • R2 / (R1 + R2)13. A tę zmianę (spadek potencjału na
wejściu odwracającym) obserwuje złośliwy Leon. Zauważa, że pomiędzy wejściami
pojawiło się napięcie ΔU i w ramach swojej złośliwości podnosi potencjał na wyjściu
wzmacniacza błędu o K • ΔU. Jako że napięcie na złączu baza - emiter tranzystora T jest
Rezystancja rWY reprezentuje całkowitą rezystancję wyjściową stabilizatora, składająca
się z reb' tranzystora, przetransformowanej rezystancji obwodu bazy i ewentualnie - o ile jest
- rezystancji opornika w obwodzie zabezpieczenia nadprądowego.
12
Proszę zauważyć, że "wejście" do pętli jest umiejscowione ZA r WY!
11
Działania dzielnika napięciowego krasnoludek Leon chyba nie musi tłumaczyć?...
13
8
Δ U rWY =K⋅Δ U +Δ U WY
Δ U rWY =Δ I O⋅r WY
Δ U =Δ U WY⋅R2 /( R 1+ R 2)
stąd:
Δ I O⋅r WY =Δ U WY⋅K⋅R2 /(R 1+ R 2)+Δ U WY
i w końcu:
Δ I O⋅r WY =Δ U WY⋅(1+ K⋅
R2
)
R1 + R 2
Iloczyn współczynnika krasnoludka K i stopnia podziału napięcia w dzielniku R 1 - R2
jest nazywany wzmocnieniem w pętli sprzężenia zwrotnego i bywa oznaczany jako K • γ,
gdzie γ = R2 / (R1 + R2).
Z kolei nietrudno zauważyć, że stosunek ΔU WY do ΔIO to "nowa" rezystancja
wyjściowa rWY' stabilizatora, zmodyfikowana przez działanie pętli ujemnego sprzężenia
zwrotnego.
Tak jest przy założeniu, że do opornika R1 nie wpływa żaden prąd i cała zmiana prądu
wyjściowego ΔIO "przenosi się" do rWY. W dobrze zaprojektowanych stabilizatorach,
w których rezystancja wyjściowa jest na ogół o kilka rzędów wielkości mniejsza od R 1 i R2,
takie założenie jest słuszne.
14
Instytut Systemów Elektronicznych PW - Laboratorium Układów i Systemów Elektronicznych
Ostatecznie:
r WY ' =
r WY
R2
1+ K⋅
R 1+ R 2
=
r WY
1+ K⋅γ
A więc pętla ujemnego sprzężenia zwrotnego zmniejsza rezystancję wyjściową układu
nią objętego mniej więcej tyle razy, ile wynosi wzmocnienie w tej pętli. Widać wyraźnie, że
zmniejszenie rezystancji rWY jest tym większe, im większe jest wzmocnienie wzmacniacza
błędu i im słabszy jest podział napięcia wyjściowego w dzielniku R 1 - R2. Efekt działania
pętli będzie więc najsilniejszy wtedy, gdy R 1 = 0, R2 = ∞, albo jedno i drugie - czyli kiedy
odwracające wejście wzmacniacza błędu jest połączone bezpośrednio z wyjściem
stabilizatora.
Tyle teoria. W rzeczywistości aż tak dobrze nie jest i z różnych powodów
w konkretnych wykonaniach stabilizatorów z ujemnym sprzężeniem zwrotnym redukcja
rezystancji wyjściowej jest mniejsza, niż to wynika z ostatniego wzoru. Jednak ogólna
opisana wyżej tendencja zostaje zachowana i stabilizator z pętlą ujemnego sprzężenia
zwrotnego ma o wiele mniejszą rWY, niż jego odpowiednik bez tej pętli.
9
Stabilizatory napięcia o pracy ciągłej - materiały pomocnicze