Zasady ruchu dla punktu materialnego Wykład 10 15dyn
1. Zasada pędu i momentu pędu (krętu)
Ilością
ruchu
lub pędu nazywamy wektor
V
(12)
H mV m
Pochodna pędu względem czasu przy stałej masie m
zgodnie z drugim prawem Newtona,
wynosi
d
d
dV
H ( H ) mV m
ma P
dt
dt
dt
(13)
Pochodna pędu względem czasu punktu materialnego
równa się sumie sił działających na ten punkt
Równanie (13)
zapisać w postaci
możemy
(a)
mdV Pdt
Po scałkowaniu (a) w przedziałach odpowiadającym
czasom t1 i t2 otrzymujemy
t2
m dV m V V0 Pdt
V
V0
(14)
t1
przyrost geometryczny pędu
popęd
Równanie (14) wyraża zasadę pędu dla punktu
materialnego
Jeżeli na punkt materialny nie działa siła P lub układ sił
równoważnych to popęd jest równy zeru, a pęd jest
wartością stałą
(15)
mV const
Równanie (15) wyraża zasadę zachowania pędu
Jeżeli na punkt materialny działa samozrównoważony
układ sił, to pęd jest wektorem stałym
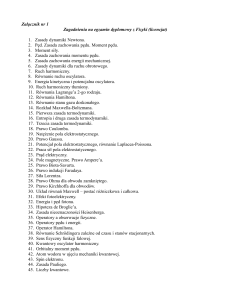
Przykład 9
Po równi pochyłej tworzącej z poziomem kąt zsuwa się
ciało o masie m kg (rys.11). Dla czasu t = 0 prędkość
początkowa V1 = 0. Po jakim czasie t ciało uzyska prędkość
V, jeśli współczynnik tarcia ślizgowego wynosi μ.
Rozwiązanie
16 dyn
y
T
V1=0
mg
N
V2=V
x
Rys.11
Na zsuwające się ciało, które traktujemy jako punkt
materialny, działają: siła ciężkości mg, reakcja normalna
N równi i siła tarcia T. siły te są stałe co do wartości,
kierunku i zwrotu. Równanie zasady pędu na oś 0x
t
mV2 mV1 Pix dt
t
mV Pix dt
0
(b)
0
Siły działające na ciało są stałe i wynoszą na oś x
Pix mg sin mg cos
Popęd siły jest równy
t
Pix dt Pix t mg sin cos t
(c)
0
Podstawiając (c) do (b) otrzymujemy
mV mg (sin cos )t
stąd
t
V
g sin cos
(d)
określić czas jeśli: V = 3m/s, = 270, μ = 0.1, g = 9.81m/s2
3
0.84 s
z (d) t
0
0
9.81(sin 27 0.1 cos 27 )
Moment pędu (kret)
i
j
k
K 0 r mV x
y
z , gdzie x Vx , y V y ,
m x m y m z
K 0 m yz zy i mzx xz j m xy yx k K x K y K z
17dyn
z
K0
mV
k
m
900
r
0
i
y
j
z
x
y
x
Rys.12
Niech ruch punktu występuje pod działaniem wypadkowej
siły P. Na podstawie
(13) mamy
d mV
P
dt
(c)
Pochodna geometryczna względem czasu krętu K0
względem
nieruchomego bieguna 0
dK 0 d
dr
d mV
d mV
r mV mV r
V mV r
dt
dt
dt
dt
dt
V mV VmV sin 0 0 0
dK 0
r P M 0
Ostatecznie
(16)
dt
Pochodna względem czasu krętu K0 punktu materialnego
względem nieruchomego bieguna 0 jest równa momentowi
względem tegoż bieguna wypadkowej sił działających na
dany punkt materialny.
Z równania (16) wynikają trzy równania skalarne
dK x
Mx ,
dt
dK y
dt
My,
dK z
Mz
dt
(17)
dK 0
gdy M 0 0 to
0 stąd K 0 const
dt
18dyn
Jeżeli moment względem dowolnego bieguna 0 wypadkowej
sił działających na punkt materialny jest równy zero, to kręt
punktu materialnego wyznaczony względem tegoż bieguna
jest stały.
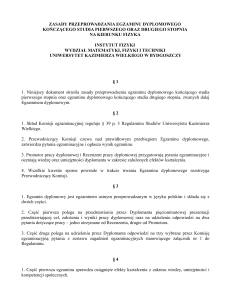
Przykład 10
Planeta o masie m w swoim ruchu dookoła Słońca ma w
punkcie A0 prędkość V1 (rys.13). Wyznaczyć prędkość V2
planety w przeciwległym punkcie A1 toru. Dana jest
dłuższa półoś elipsy ( toru planety) a i jej promień r0 w
punkcie początkowym A0.
m
V1
b P
A1
0
S
A0
a
r0
V2
Rys.13
Rozwiązanie
Wartość krętu względem punktu S (Słońca) w położeniu A0
i A1 planety wynosi
K Ao mV1 SA0 mV1ro , K A1 mV 2 SA1 mV2 2a r0
Siła P przyciągająca planetę, jest siłą centralną skierowaną
do Słońca S. Moment siły P względem punktu S jest równy
zeru. Kręt względem punktu S zachowuje stałą wartość,
zatem mV1r0 mV2 ( 2a r0 ) stąd V2
r0
V
2 a r0
Zasada równoważności energii kinetycznej i pracy
Definicja energii kinetycznej punktu materialnego
o masie m
E
1
mV 2
2
(17)
Dynamiczne równanie ruchu (2) mnożymy
skalarnie stronami przez V
dV
dV
m
P
mV
P V
dt
dt
Po wykorzystaniu tożsamości
19dyn
(d)
dV d 1 d V 2
V
V V
dt dt 2
dt 2
gdzie uwzględniono że
V V V V cos 0 V 2
i pamiętając, że V r , równanie (d) ma postać
d mV 2 dr
P
dt 2
dt
(e)
Po scałkowaniu stronami równania (e) otrzymujemy
t2
mV 22 mV12
d mV 2
(f)
P dr
dt 2 dt P dr
2
2
AB
t1
AB
Lewa strona równania (f) przedstawia przyrost energii
kinetycznej E w przedziale czasu (t1, t2). Wyrażenie po
prawej stronie równania (f) nazywamy pracą i oznaczamy
W. Zatem
(18)
E2 E1 W
E W
A
V1
m dr
B
V2
r
P
0
Rys.14
Przyrost energii kinetycznej punktu materialnego w
skończonym przedziale czasu jest równy sumie prac, które
wykonały w tym samym czasie wszystkie siły działające na
ten punkt.
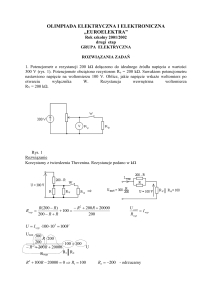
Przykład 11
20dyn
Wahadło matematyczne o długości l wychylono z położenia
równowagi o kąt prosty i następnie oswobodzono bez
prędkości początkowej. Wyznaczyć prędkość punktu
materialnego o masie m zawieszonego na końcu nici
wahadła oraz napięcie nici jako funkcje kąta φ
odmierzanego od pionu (rys.15).
l
A0
0
h=lcosφ
S
φ
m
mg
V
Rys.15
Rozwiązanie
Na podstawie twierdzenia o energii kinetycznej
wyznaczamy najpierw prędkość punktu materialnego. W
rozpatrywanym przypadku prace wykonuje tylko siła
ciężkości, gdyż reakcja nici oznaczona na rysunku przez S
jest normalna do toru. Biorąc pod uwagę to, że w chwili
początkowej prędkość punktu materialnego była równa
mV 2
zeru, otrzymujemy
mgl cos stąd
2
(g)
V 2 lg cos dla ( 2 2 )
Aby wyznaczyć napięcie nici, liczbowo równe reakcji S,
układamy równanie dynamiczne w kierunku normalnej do
toru rozpatrywanego punktu materialnego
V2
m
S mg cos
ma n Pn
(h)
l
Z równania (g) i (h) znajdujemy
(i)
S 3mg cos
Z równania (i) wynika, że Smax S 0 3mg