ISSN 0239-6114
AKADEMIA GÓRNICZO-HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE
SU 1643
Kazimierz Korbel
INSTRUKCJE
DO ĆWICZEŃ LABORATORYJNYCH
UCZELNIANE WYDAWNICTWA NAUKOWO-DYDAKTYCZNE
KRAKÓW 2002
1643 pozycja wydawnictw dydaktycznych (Preprint)
Akademii Górniczo-Hurnicej im. Stanisława Staszica w Krakowie
C Wydawnictwa AGH, Kraków 2002
ISSN 0239-6114
2
SPIS TREŚCI
ĆWICZENIE LABORATORYJNE 1
Układy odczytu detektorów promieniowania jonizującego............................................
5
ĆWICZENIE LABORATORYJNE 2
Transformator impulsowy ..............................................................................................
14
ĆWICZENIE LABORATORYJNE 3
Filtr quasi-gaussowski (CR)m - (RC)n ..........................................................................
20
ĆWICZENIE LABORATORYJNE 4
Filtr aktywny wzmacniacza 1101 ..................................................................................
26
ĆWICZENIE LABORATORYJNE 5
Układ wykrywania i odrzucania spiętrzeń (PUI/R).......................................................
31
ĆWICZENIE LABORATORYJNE 6
Pasywne układy przywracania poziomu zerowego (BLR).............................................
38
ĆWICZENIE LABORATORYJNE 7
Przedwzmacniacz ładunkowy ........................................................................................
42
ĆWICZENIE LABORATORYJNE 8
Układy koincydencyjne .................................................................................................
47
ĆWICZENIE LABORATORYJNE 9
Integratory liniowe .........................................................................................................
53
ĆWICZENIE LABORATORYJNE 10
Integrator logarytmiczny A ............................................................................................
60
ĆWICZENIE LABORATORYJNE 11
Integrator logarytmiczny B ............................................................................................
64
ĆWICZENIE LABORATORYJNE 12
Układy odbioru informacji czasowej .............................................................................
68
ĆWICZENIE LABORATORYJNE 13
Szeregowo-równoległa bramka liniowa.........................................................................
72
ĆWICZENIE LABORATORYJNE 14
Mostkowa bramka diodowa............................................................................................
78
3
ĆWICZENIE LABORATORYJNE 15
Liniowa bramka transmisyjna 1105 ...............................................................................
83
ĆWICZENIE LABORATORYJNE 16
Stabilizator spektrometru................................................................................................
87
ĆWICZENIE LABORATORYJNE 17
Filtr niestacjonarny z integratorem bramkowanym .......................................................
93
DODATEK A
Generatory szumów .......................................................................................................
98
DODATEK B
Generator impulsów przypadkowych ...........................................................................
106
DODATEK C
Wyznaczanie czasu rozdzielczego układów koincydencyjnych metodą
koincydencji przypadkowych.......................................................................................... 110
DODATEK D
Symulacje komputerowe bramki mostkowej ................................................................. 114
DODATEK E
Sonda scyntylacyjna SSU-70 ......................................................................................... 117
DODATEK F
Subukłady systemu autoregulacji stabilizatora spektrometru ........................................ 119
DODATEK G
Deficyt balistyczny ........................................................................................................
122
DODATEK H
Pomiar impedancji wejściowej wzmacniacza ................................................................ 126
DODATEK I
Ilustracje poglądowe modułu oraz zestawów ćwiczeniowych...................................... 130
4
ĆWICZENIE LABORATORYJNE 1
Układy odczytu detektorów promieniowania jonizującego
Zakres ćwiczenia
Weryfikacja doświadczalna dopełnienia warunków kryterialnych nakładanych na
przedwzmacniacze przeznaczone do pracy w systemie prądowym i napięciowym.
Porównanie odpowiedzi uzyskiwanych w trzech systemach pracy układów odczytu
licznika scyntylacyjnego (prądowym, napięciowym i napięciowo-prądowym).
Badanie własności układu pomiaru średniego poziomu.
Przedmiot ćwiczenia
Przedmiotem ćwiczenia jest zestaw doświadczalno-demonstracyjny obejmujący licznik scyntylacyjny z kryształem NaJ(Tl) oraz dwa przedwzmacniacze, przeznaczone do
pracy, odpowiednio, w systemie napięciowym oraz w systemach prądowym i napięciowo-prądowym.
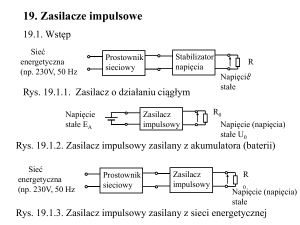
Na rysunku 1.1 przedstawiono schemat wzmacniacza rekomendowanego do pracy
w systemie prądowym względnie napięciowo-prądowym.
+6V
0.1
1.5H
51
10
TEST
BF200
51
200
WY
0.1
WE
51
470
2N 3503
330
GND
-6V
Rys. 1.1. Schemat ideowy wzmacniacza przeznaczonego do pracy w systemie prądowym
Wzmacniacz pracujący w tym systemie musi charakteryzować się bardzo niską rezystancją wejściową i odznaczać szerokim pasmem przenoszenia. Istnieją różne sposoby spełnienia takich warunków. W ćwiczeniu zastosowano stosunkowo prosty układ ze stopniem
wejściowym o wspólnej bazie i kompensacją dwójnikową charakterystyki przenoszenia.
Do pracy w systemie napięciowym wymagany jest natomiast wzmacniacz o wysokiej
rezystancji wejściowej i relatywnie węższym paśmie przenoszenia. Tego rodzaju wymagania spełnia układ, którego schemat ideowy przedstawiono na rysunku 1.2. Jest to konwencjonalny układ super-alfa z „bootstrapowaniem” rezystora w obwodzie bazy pierwszego stopnia.
5
Dla wygody opisu w dalszej części instrukcji obydwa przedzwzmacniacze będą
określane odpowiednio mianem wzmacniacza prądowego (CA – current amplifier) oraz
wzmacniacza napięciowego (VA – voltage amplifier).
-12V
TEST
10
100
10
BC179
10n
68k BC179
WE
50
68k
33k
100k
WY
1
1
510
MASA
Rys. 1.2. Schemat ideowy wzmacniacza do pracy w systemie napięciowym
Obydwa przedwzmacniacze zmontowano w identycznych obudowach. Rysunek 1.3
pokazuje schematycznie rozmieszczenie łącz (gniazd i wtyków) na obudowach obu wzmacniaczy.
Symbole użyte na schemacie oznaczają odpowiednio:
WE – gniazdo wejściowe łączące wzmacniacz z detektorem (za pośrednictwem skrzynki rozdzielczej),
WY – gniazdo wyjściowe sygnału,
TEST – gniazdo wejściowe dla pomiarów testujących wzmacniacza,
NN – zespół gniazd doprowadzających napięcie zasilające wzmacniacz,
POM – gniazdo pomocnicze do pracy z pominięciem puszki rozdzielczej.
WE
WY
CA lub VA
POM TEST NN
Rys. 1.3. Rozmieszczenie gniazd i kontrwtyków na obudowie przedwzmacniaczy
Program ćwiczenia instrukcja szczegółowa
Zadanie 1.1. Pomiary testujące przedwzmacniaczy
Celem tych pomiarów jest stwierdzenie, czy spełniają one założenia kryterialne kwalifikujące je do kategorii układów prądowych lub napięciowych. Założenia kryterialne dotyczą w szczególności rezystancji wejściowej Ri przedwzmacniaczy oraz ich szerokości
pasma przenoszenia BW (Bandwidth).
6
Pomiar rezystancji wejściowej wzmacniacza prądowego
Pomiary rezystancji wejściowej wzmacniacza prądowego należy dokonać uproszczoną wersją metody standardowej, której zasadę ilustruje przedstawiony na rysunku 1.4
szczegółowy schemat układu pomiarowego.
TDS 224
HP 33120 A
K
ViR,0
R
CA
Rys. 1.4. Układ do pomiaru rezystancji wejściowej wzmacniacza prądowego
Metoda ta polega na wyznaczeniu napięć wejściowych ViR i Vio podawanych na
wejście wzmacniacza odpowiednio za pośrednictwem wtrąconej rezystancji szeregowej R
oraz w sposób bezpośredni (tj przy zwartym kluczu K), dających na wyjściu taką samą
wartość napięcia Vo. Przy podanych w dodatku H założeniach upraszczających rezystancję
wejściową Ri opisuje zależność
Vi 0
Ri R
.
ViR Vi 0
Dla zminimalizowania wpływu pojemności wejściowej wzmacniacza i pojemności
sprzęgającej ze źródłem sygnału pomiarowego (10 F) pomiar należy przeprowadzić
sygnałem sinusoidalnie zmiennym o częstotliwości f = 50 kHz i zastosować rezystor zewnętrzny o wartości około dwukrotnie większej od spodziewanej wartości rezystancji wejściowej wzmacniacza. Przypomnijmy, że rezystancja wejściowa stopnia ze wspólną bazą
pracującego z relatywnie niską opornością obciążenia w przybliżeniu jest równa wartości
parametru h11b. Według danych katalogowych tranzystorów małej mocy, pracujących
w układzie wspólnej bazy, ich pojemność wejściowa kształtuje się na poziomie od kilku do
kilkunastu pikofaradów. Dla obliczenia stałej czasowej obwodu wejściowego wzmacniacza
przyjąć szacunkowo Ci = 10 pF, a uzyskany wynik skonfrontować z wymogami kryterialnymi. Stała czasowa wyświetlania scyntylatora NaJ(Tl) wynosi 0,25 s.
Pomiar impedancji wejściowej wzmacniacza napięciowego
Impedancję wejściową wzmacniacza napięciowego należy wyznaczyć metodą pośrednią, przez pomiar stałej czasowej obwodu różniczkującego utworzonego przez układ
rezystancji wejściowej wzmacniacza i wprowadzonej pojemności zewnętrznej. W tym celu
należy zestawić układ pomiarowy według rysunku 1.5.
Sygnałem pomiarowym jest w tym przypadku fala prostokątna o okresie wielokrotnie
przewyższającym stałą czasową obwodu wejściowego badanego wzmacniacza. Sygnał
pomiarowy pobierany jest z generatora HP 33120A przełączonego w ten tryb generacji.
7
Wartość amplitudy fali prostokątnej należy nastawić na poziomie 500 mV. Organami
regulacji oscyloskopu TDS 224 wyselekcjonować do obserwacji i pomiaru przebieg związany z narastającym zboczem fali prostokątnej, dobierając wzmocnienie kanału pomiarowego oscyloskopu, oraz parametry układu podstawy czasu w taki sposób, aby uzyskać
rozciągnięcie mierzonego sygnału (impulsu) na cały ekran. Korzystając z możliwości
pomiarowych oscyloskopu, dokonać pomiaru szerokości impulsu wyjściowego na poziomie 1/e jego amplitudy. Szczegóły tej techniki pomiarowej zawarte są w instrukcji obsługi
oscyloskopu TDS 224. Zapoznać się z odnośnym jej fragmentem.
TDS 224
HP 33120 A
C1
P
PRZYSTAWKA
C2
VA
Rys. 1.5. Schemat układu do pomiaru impedancji wejściowej wzmacniacza napięciowego
Dla wyznaczenia obu składowych impedancji wejściowej wzmacniacza należy wykonać dwa pomiary stałych czasowych 1 i 2 przy dwóch różnych wartościach pojemności
zewnętrznych C1 i C2 (stanowisko ćwiczeniowe wyposażono w przystawkę zawierającą
w zamkniętej obudowie zespół wymaganych pojemności przełączanych wbudowanym do
niej przełącznikiem P). Wyznaczone eksperymentalnie wartości stałych czasowych związane są z parametrami obwodu pomiarowego prostymi relacjami (patrz dodatek H)
ik C k Ci Ri ,
gdzie:
k numer kondensatora,
Ri rezystancja wejściowa wzmacniacza,
Ci pojemność wejściowa wzmacniacza.
Układ uzyskanych w ten sposób równań pozwala obliczyć wartości obu szukanych
wielkości.
Pomiar szerokości pasma przenoszenia wzmacniaczy
Pomiar szerokości pasma przenoszenia wzmacniaczy wyznaczyć w układzie pomiarowym pokazanym na rysunku 1.6.
TDS 224
HP 32120 A
Rys. 1.6. Schemat układu do pomiaru charakterystyki amplitudowej wzmacniacza
8
Pomiar należy przeprowadzić metodą „punkt po punkcie” w przedziale częstotliwości
od 1 kHz do 15 MHz przy założonej stałej amplitudzie napięcia wejściowego mieszczącego się w zakresie liniowej pracy przedwzmacniacza. Zestawić tabelarycznie wyniki
pomiarów bezpośrednich, uzupełniając tabelę wartościami obliczonych współczynników
wzmocnienia wzmacniaczy: napięciowego (kV = Vo/Vi) i prądowego (k=Vo/Ii), oraz prądu
wejściowego wzmacniacza prądowego (Ii=Vi/RS)’
Wykreślić w układzie podwójnie logarytmicznym przebiegi charakterystyk amplitudowych wzmacniaczy: prądowego - k(f) i napięciowego – kV(j). Ocenić czy rozporządzalna
szerokość pasma jest wystarczająca dla przeniesienia bez zniekształceń sygnału formowanego na wejściu przedwzmacniacza w danym systemie jego pracy.
Zadanie 1.2. Testowanie zespołu detektor elektronika odczytu
Testowanie systemu prądowego
Dokonać połączeń podzespołów systemu prądowego (licznik scyntylacyjny, wzmacniacz prądowy, zasilacz WN fotopowielacza licznika scyntylacyjnego, zasilacz NN wzmac00niacza oraz linia transmisyjna) według uproszczonego schematu z rysunku 1.7.
CA
G-6
G-1
P
LICZNIK SCYNT.
ZAS.WN
G-2
G-4
G-5
OSCYLOSKOP
ZWORA
ZAS.NN
Rys. 1.7. Schemat zestawu do badania pracy licznika scyntylacyjnego w systemie prądowym
UWAGA
Wartość napięcia zasilania licznika scyntylacyjnego nastawić według wskazówek
prowadzącego zajęcia laboratoryjne!
Przed włączeniem zasilaczy starannie sprawdzić poprawność połączeń!
Umieścić kontrolne źródło promieniotwórcze w uchwycie na stanowisku
pomiarowym. Dokonać obserwacji sygnału detektora za pomocą oscyloskopu pomiarowego TDS-224, nastawiając odpowiednio wzmocnienie wzmacniacza odchylania pionowego i zakres podstawy czasu. Przeprowadzić obserwacje sygnałów dla różnych poziomów
wyzwalania podstawy czasu oscyloskopu. Sformułować wnioski stąd wypływające.
9
Wyznaczyć stałą czasową opadania impulsu wyjściowego i ewentualnie oszacować
czas jego narastania tn.
Testowanie systemu napięciowego
Zamiast wzmacniacza prądowego wstawić (zgodnie ze schematem z rys. 1.8) wzmacniacz napięciowy i powtórzyć poprzednio wskazane procedury pomiarowe.
VA
G-1
LICZNIK SCYNT.
G-3
OSCYLOSKOP
G-2
G-4
G-5
ZWORA
ZAS.NN
ZAS.WN
Rys. 1.8. Schemat zestawu do badania pracy licznika scyntylacyjnego w systemie napięciowym
Testowanie systemu napięciowo-prądowego
Przełączyć podzespoły układu odczytu w napięciowo-prądowy tryb pracy zgodnie ze
schematem podanym na rysunku 1.9 włączając w tor sygnału (między gniazda G-4 i G-5)
koncentryczny kabel transmisyjny.
CA
G-1
LICZNIK
SCYNT.
G-6
LINIA TRANSM.
P
OSCYLOSKOP
G-4
G-2 G-5
ZAS.WN
ZAS.NN
Rys. 1.9. Układ do badania pracy licznika scyntylacyjnego w systemie napięciowo-prądowym
Wykonać serię obserwacji i pomiarów szacunkowych, analogicznych jak w pomiarach testujących systemu prądowego i napięciowego. Opisać zwięźle wyniki poczynionych
obserwacji i zestawić w tabeli rezultaty pomiarów.
10
Zadanie 1.3. Badanie własności układu pomiaru średniego poziomu
Układ pomiaru średniego poziomu zestawić wg rysunku 1.10 z zastępczym źródłem
sygnału napięciowego (Generator PGP-6 + pasywny STRETCHER), wykorzystując jako
wzmacniacz napięciowy, wejściowy wzmacniacz toru odchylania pionowego oscyloskopu
przełączony w (niezbędny w założonym reżymie pracy) tryb sprzężeń stałoprądowych.
TDS 224
Rekomendowane
nastawy gener.:
Vi max < 5 V
ti = 500 ns
f = <2-20-200> kHz
Polarność dod.
PGP-6
2k
1n
200
k
Ri=1 M
Ci=20 pF
STRETCHER
Rys. 1.10. Schemat stanowiska do badania układu pomiaru średniego poziomu
Dla podanych wartości elementów stretchera (układu wydłużającego) dokonać obserwacji sygnału wyjściowego przedwzmacniacza i pomiaru jego poziomu średniego <Vo>
oraz napięcia międzyszczytowego fluktuacji dla różnych częstotliwości ciągu licznikowych impulsów wejściowych. Odczytu wartości mierzonych wielkości dokonać za pomocą organów pomiarowych oscyloskopu korzystając z procedury MEASURE oraz wskazań
poziomu trygera (TRIGGER LEVEL). Uzyskane wyniki skonfrontować z przeliczeniami
teoretycznymi według pierwszego i drugiego twierdzenia CampbellaFrancisa.
Opis układu licznika scyntylacyjnego
Wykorzystywany w ćwiczeniu licznik scyntylacyjny składa się z dwóch podstawowych podzespołów: scyntylatora NaJ(Tl) o wymiarach 20 x 20 mm oraz fotopowielacza typu EMI 9524 B.
Na rysunku 1.11 przedstawiono schemat połączeń elektrycznych układu fotopowielacza.
2
11 x 2M2
3x1n
5
+WN
MASA
ANODA
1
EMI 9524 B
Rys. 1.11. Schemat układu zasilania elektrod (dynod i anody) fotopowielacza
11
Włączenia licznika scyntylacyjnego do pracy w wybranym trybie dokonuje się za pośrednictwem puszki rozdzielczej, której schemat podano na rysunku 1.12. W zestawie
ćwiczeniowym jest ona zamontowana na specjalnych prowadnicach wspólnie z pozostałymi blokami (wzmacniaczami i licznikiem scyntylacyjnym).
PUSZKA ROZDZIELCZA
G-6
A
G -1
W
K
N
LICZNIK SCYNTYLACYJNY
0.1
100 k
4700
1
0.1
100 k
PRZEŁ.
2
G-2
G-3
G-4
G-5
ZWORA lub LINIA TRANSMIS.
Rys. 1.12. Schemat połączeń w pośredniczącej puszce rozdzielczej
Wzmacniacze włączane są w tor sygnału alternatywnie. Na rysunku 1.13 pokazano
umiejscowienie na prowadnicach wzmacniacza prądowego (CA).
WY
Licznik scyntylacyjny
Puszka
rozdzielcza
CA
WN
KABEL
PRZEŁ.
WE’
6V
Rys. 1.13. Połączenie zespołu bloków toru pomiarowego w systemie prądowym
Rysunek 1.14 przedstawia umiejscowienie w torze pomiarowym wzmacniacza w napięciowym systemie pracy.
Licznik scyntylacyjny
Puszka
rozdzielcza
WN
KABEL
WE
PRZEŁ.
VA
-12V
WY
Rys. 1.14. Połączenie zespołu bloków toru pomiarowego w systemie napięciowym
12
Wyposażenie stanowiska pomiarowego
Demonstracyjny zestaw ćwiczeniowy (obejmujący licznik scyntylacyjny i wzmacniacze: prądowy i napięciowy)
Generator sygnałów okresowo zmiennych typu HP 33120 A
Generator impulsów typu PGP-6
Oscyloskop pomiarowy typu TDS 224
Minimoduł przelotowy układu wydłużającego (STRETCHER)
Przystawka z pojemnościami C1 i C2
Zasilacz wysokiego napięcia CAMAC-POLON 1904 lub STANDARD ZWN-21
Zasilacz niskiego napięcia typu HP E36304
Wzorcowe (kontrolne) źródło promieniowania gamma 127Cs
Kable, przewody, elementy montażowe
Literatura pomocnicza
[1] Instrukcje obsługi aparatury pomiarowej używanej w ćwiczeniu
[2] Korbel K.: Elektronika jądrowa. Cz. II. Układy elektroniki jądrowej. Kraków, Wyd.
AGH 1985
[3] Korbel K.: Układy elektroniki „Front-End”. Kraków, UWND AGH 2000
[4] Miwa H., Tohyama T.: Radiation-pulse transmission via a long cable without a preamplifier and/or a pulse transformer. Nuclear Electronics II, Conf. Proc., Belgrade
1961, 421
13
ĆWICZENIE LABORATORYJNE 2
Transformator impulsowy
Zakres ćwiczenia
Identyfikacja parametrów elektrycznych transformatora impulsowego za pomocą
konwencjonalnych metod pomiarowych.
Wyznaczenie przebiegów charakterystyki amplitudowej oraz odpowiedzi skokowej
w oparciu o schematy zastępcze i rezultaty pomiarów identyfikacyjnych.
Pomiary charakterystyk amplitudowej i skokowej.
Przedmiot ćwiczenia
Przedmiotem ćwiczenia jest zespół rdzeniowych transformatorów impulsowych, wykonanych na ferromagnetycznych rdzeniach kubkowych,
ze szczeliną powietrzną (nr 1),
bez szczeliny (nr 2).
Obydwa transformatory uzwojono techniką bifilarną; ich przekładnie zwojowe wynoszą w konsekwencji
n = 1.
Program ćwiczenia instrukcja szczegółowa
Zadanie 2.1. Identyfikacja parametrów elektrycznych transformatora
Procedura identyfikacji parametrów elektrycznych transformatora zmierza do wyznaczenia wartości następujących wielkości:
rezystancji uzwojenia pierwotnego r1 ,
rezystancji uzwojenia wtórnego r2 ,
indukcyjności głównej L ,
łącznej indukcyjności rozproszenia L S ,
łącznej pojemności własnej C.
Pomiaru oporności uzwojeń należy dokonać albo metodą mostkową, posługując się
w tym celu mostkiem technicznym RLC (E 317A), względnie miernikiem automatycznym
(CHY41 lub CHY 29). Te same przyrządy należy użyć do pomiaru indukcyjności głównej
transformatora, zapinając przyrząd pomiarowy na zaciski uzwojenia pierwotnego przy
rozwartym uzwojeniu wtórnym.
Wyznaczenia wartości L S oraz C można dokonać metodą pośrednią przez pomiar
częstotliwości drgań własnych generowanych w warunkach słabego (podkrytycznego) tłumienia przy pobudzeniu skokowym.
14
Okres drgań własnych określa formuła
T 2
aLS C ,
gdzie:
a
R2
,
R1 R 2
R1 r1 Rg
sumaryczna oporność po stronie pierwotnej,
r2 Ro
sumaryczna oporność strony wtórnej przeniesiona na pierwotną,
n2
R g oporność źródła sygnału (generatora),
R2
R o oporność obciążenia transformatora.
Na rysunku 2.1 podano schemat układu pomiarowego okresu drgań (oscylacji) własnych.
TAS 465
HP 33120A
Cd
TR
Rys. 2.1. Schemat układu do pomiaru okresu drgań własnych transformatora
Źródłem pobudzenia skokowego jest tu generator typu HP 33120A przełączony
w tryb generacji fali prostokątnej (okres przebiegu prostokątnego powinien być nieco dłuższy od długotrwałości przebiegu oscylacyjnego) do obserwacji odpowiedzi i pomiaru okresu oscylacji służy natomiast oscyloskop pomiarowy typu TAS 465 (w ikonce na rys. 2.1
ukazano przybliżony kształt odpowiedzi transformatora na wymuszenie impulsem prostokątnym).
Zadanie 2.2. Wyznaczenie charakterystyki amplitudowej w oparciu o modele
teoretyczne
Korzystając z danych pomiarowych otrzymanych w pomiarach identyfikacyjnych
wyznaczyć przebiegi charakterystyki amplitudowej w obszarze niskiej i wysokiej częstotliwości, zgodnie z uproszczonymi schematami zastępczymi transformatora dla tych zakresów.
15
Schematy te przedstawiono na rysunku 2.2
a)
b)
R1
L
LS
R1
R2
C
R2
Rys. 2.2. Schematy zastępcze transformatora w zakresie niskich (a) i wysokich (b)
częstotliwości
Poniżej podano, w notacji użytej na rysunkach, formuły teoretyczne opisujące transmitancje obu układów zastępczych.
Dla zakresu niskich częstotliwości (a) przyjmuje ona formę
R2
p
,
F ( p) NCz
R1 R2
R1 R2
p
R1 R2 L
natomiast w obszarze częstotliwości wysokich (b) opisuje ją wyrażenie
F p W Cz
R2
p L S CR 2 p L S CR1 R 2 R1 R 2
2
.
Transmitancje stanowią podstawę do opisu własności transformatora w domenie częstotliwości w formie charakterystyk amplitudowej F() i fazowej () oraz w dziedzinie
czasu jako charakterystyka impulsowa h(t) lub skokowa R(t). Zgodnie z założonym programem ćwiczenia przedmiotem zadań szczegółowych są dwie charakterystyki: amplitudowa i skokowa.
Proste procedury obliczeniowe prowadzą do następujących postaci charakterystyk
amplitudowych:
dla zakresu niskich częstotliwości (a)
Ro
RR
2 1 2
F
R
R
2
1
R1 R2
2
L2
1
2
,
dla zakresu wysokich częstotliwości (b)
2
F Ro
R1 R 2 L S CR2
2
2
LS CR1 R2
1
2 2
.
Obliczenia przeprowadzić korzystając z dostępnego w laboratorium komputera PC;
sporządzić wykresy cząstkowych funkcji F() oraz łącznej charakterystyki w pełnym
zakresie częstotliwości i dokonać ich wydruku.
16
Nieco bardziej złożone obliczenia pozwalają wyznaczyć charakterystyki skokowe R(t).
Według definicji stanowią one odpowiedź układu na wymuszenie skokowe 1H(t). Dostarczają one, stosownie do przyjętego schematu zastępczego, informacji o przenoszeniu czoła
wymuszenia (stromości i kształtu) względnie jego grzbietu. Na podstawie układu (rys. 2.2a)
stosunkowo prosto wyznaczyć można tzw. zwis (Z) przenoszonego impulsu prostokątnego.
Stanowi go spadek poziomu odpowiedzi skokowej Rt NCz w interwale rozciągłości czasowej ti takiego impulsu, przy czym
t
t
Rt NCz a exp a 1 ... ,
L R1 R 2
t
, a wynikająca stąd wartość zwisu wynosi Z a i .
R1 R 2
Odpowiedź skokowa układu według schematu zastępczego (rys. 2.2b) uwarunkowana
jest wartościami biegunów funkcji operatorowej F p W Cz Są one opisane ogólną zależgdzie
nością
p1, 2
2
k j
T
1 k 2 ,
w której parametr k reprezentuje współczynnik tłumienia uzależniony od wartości parametrów transformatora relacją
T R1
1
.
k
4 L S R 2 C S
Łatwo zauważyć, że dla dodatniej wartości wyrażenia podpierwiastkowego bieguny
stanowią parę rzeczywistą, zaś dla wartości ujemnych sprzężoną parę zespoloną. Przy jej
wartości zerowej istnieje natomiast tylko jeden, rzeczywisty biegun podwójny. Odpowiadające powyższym przypadkom tłumienia przyjęto odpowiednio zwać tłumieniem
podkrytycznym (k < 1), krytycznym (k = 1) i nadkrytycznym (k > 1). W konsekwencji dla
wyznaczonych w ten sposób wartości k odpowiedzi skokowe przyjmują istotnie odmienne
postaci.
W szczególności:
dla k < 1
t
t
2 kt
k
Rt a 1
sin 2 1 k 2 cos 2 1 k 2 exp
,
T
T
T
1
k
dla k = 1
t
t
Rt a 1 1 2 exp 2 ,
T
T
dla k > 1
4k 2
1
t
4 kt
Rt a 1 2
exp
exp
2
.
T
4k 1
kT 4k 1
17
Przebiegi odpowiedzi skokowej dla wyróżnionych warunków tłumienia przedstawiono
poglądowo na rysunku 2.3.
Vo
k<1
k=1
k>1
t
Rys. 2.3. Przykładowe przebiegi odpowiedzi skokowej transformatora przy różnych tłumieniach
Na podstawie wyników pomiarów identyfikacyjnych obliczyć wartość współczynnika
tłumienia jednego z transformatorów i stosownie do uzyskanego wyniku – korzystając
z grafiki komputerowej zobrazować przebieg odpowiedzi skokowej.
Zadanie 2.3. Eksperymentalne wyznaczenie charakterystyki amplitudowej
transformatora
Zestawić układ pomiarowy według rysunku 2.4. Stanowi on modyfikację układu z rysunku 2.1, w którym w miejsce pojemności C włączono rezystor obciążający Ro natomiast
generator przełączono w tryb generacji sygnału sinusoidalnego.
TAS 465
HP 33120A
Ro
TR
Rys. 2.4. Schemat układu do pomiaru charakterystyki amplitudowej transformatora
Pomiar charakterystyki należy przeprowadzić metodą „punkt po punkcie”, ze szczególnym zagęszczeniem punktów pomiarowych w początkowym i końcowym obszarze
pasma przenoszenia. Dla określenia tych obszarów skorzystać z wyników poprzednich
pomiarów i obliczeń numerycznych. Przyjąć amplitudę sygnału wejściowego na poziomie
kilku woltów.
18
Przedmiotem bezpośredniego pomiaru są w tym przypadku amplitudy sinusoidalnie
zmiennego sygnału wejściowego Vi~ oraz wyjściowego Vo~ . Pomiary te należy wykonać za pomocą dwukanałowego oscyloskopu pomiarowego dla dwóch skrajnie różnych
obciążeń transformatora (1 M i 100 ). Rezultaty pomiarów punktowych przedstawić
w ujęciu tabelarycznym oraz wykreślnie, odwzorowując współczynnik transformacji
(wzmocnienie) w dB oraz częstotliwość w skali logarytmicznej.
Zadanie 2.4. Pomiar charakterystyki przenoszenia transformatora
Celem tego pomiaru jest wyznaczenie przekładni napięciowej transformatora oraz
zakresu jego liniowej pracy. Należy go przeprowadzić w układzie z rysunku 2.3 dla częstotliwości f = 10 kHz, stosując w tym przypadku generator sinusoidalny o szerszym zakresie
napięć, a mianowicie generator RC typu PO-18. Wyznaczyć charakterystyki VoVi obu
transformatorów oraz sprawdzić czy ich przekładnie są równe jedności. Określić dopuszczalny poziom sygnału wejściowego, powyżej którego pojawiają się zniekształcenia.
Zadanie 2.5. Pomiar odpowiedzi transformatora na impuls prostokątny
Pomiar ten przeprowadzić w układzie zestawionym uprzednio do pomiaru okresu
drgań własnych, uwidocznionym na rysunku 2.1.
Zmierzyć czas narastania zbocza wiodącego i opadającego odpowiedzi na wymuszenie
impulsem prostokątnym o czasie trwania timp = 1s oraz zwis odpowiedzi przy długości
impulsu wymuszającego równej timp = 1ms. Pomiary te przeprowadzić dla dwóch znacząco różnych wartości oporności obciążenia transformatora, a mianowicie dla R2 =100 k,
oraz R2 = 100 . Przerysować odpowiedzi z ekranu oscyloskopu.
Wyposażenie stanowiska ćwiczeniowego
Moduł ćwiczeniowy zawierający dwa transformatory impulsowe
Multimetr cyfrowy LCR-Meter: Mod. CHY41
Generator wielofunkcyjny typu HP 33120A
Oscyloskop pomiarowy typu TAS 465 względnie TDS220
Generator sygnału sinusoidalnego: typ PO-18
Kable, przewody i elementy bierne
Ogólnie dostępny komputer klasy PC
Literatura pomocnicza
[1] Korbel K.: Układy elektroniki „Front-End”. Kraków, UWND AGH 2000
[2] Loveless E.C., Grossart J.: The use of pulse transformers with radiation detectors.
Conf. Proc. Nuclear Electronics II IAEA, Vienna 1962, 317
[3] Millman J., Taub H.: Pulse and digital circuits. N.Y., Toronto, London, McGraw-Hill
Book Company, Inc. 1956
19
ĆWICZENIE LABORATORYJNE 3
Filtr quasi-gaussowski (CR)m - (RC)n
Zakres ćwiczenia
Badanie własności filtracyjnych stacjonarnego, pojemnościowo-rezystywnego filtru
quasi-gaussowskiego.
Pomiary i obliczenia analityczne przepustowości widmowej filtru.
Obserwacja modyfikacji widm szumowych oraz przebiegów czasowych impulsów
„licznikowych” przez proste i złożone struktury filtrów RC dla różnych wartości ich
stałych czasowych.
Pomiary wartości średniej kwadratowej napięcia szumów oraz amplitudy odpowiedzi
na wymuszenie impulsem „licznikowym” [typu A exp b t ] w zadanych konfiguracjach filtru RC.
Wyznaczenie zależności poziomu szumów wyjściowych od stałej czasowej filtru dla
różnych konfiguracji filtru RC i dla różnych rodzajów szumu wejściowego (szum
biały, szum typu 1/f 2 , oraz ich suma).
Wyznaczenie zależności stosunku sygnału do szumu od wartości stałej czasowej zadanej konfiguracji filtru oraz zadanych przebiegów czasowych impulsu „licznikowego” i widma szumów.
Przedmiot ćwiczenia
Przedmiotem ćwiczenia jest zespół filtrów górno- i dolnoprzepustowych zmontowanych we wspólnym module ćwiczeniowym umożliwiającym realizacje zadanych
tematem ćwiczenia układów. Na rysunku 3.1 przedstawiono uproszczony schemat tego
modułu oznaczanego skrótowo na schematach układów pomiarowych, wg terminologii
anglosaskiej, symbolem DUT 1 (Device Under Test).
I DIFF
II INT
I INT
III INT
II DIFF
WE
1
P1/2
P1/3
P1/4
C
C
1
1
1
1
1
P1/5
P1/1
RA
RB
RC
RD
RE
1
C
2
C
3
C
P2
4
5
WY
6
220
Rys. 3.1. Schemat układu modułu ćwiczeniowego
20
Moduł ćwiczeniowy (DUT 1) zawiera dwa obwody różniczkujące i trzy obwody całkujące o identycznych, przełączanych wspólnie za pomocą przełącznika P-1, wartościach
stałych czasowych. Obwody te separowane są aktywnymi wtórnikami w konfiguracji
„super alfa”. Przełącznik kciukowy P-2 pozwala wybrać wyjściowy punkt pomiarowy,
stosownie do którego dokonuje się zarazem wyboru konkretnej konfiguracji filtru.
W szczególności w położeniu „1” WYJŚCIE modułu łączone jest bezpośrednio z jego WEJŚCIEM, pozwalając na obserwację i pomiar sygnałowych i szumowych wymuszeń
wejściowych. W położeniu „2” na WYJŚCIE modułu przekazywane są sygnały wyjściowe
pierwszego obwodu różniczkującego (I DIFF), podlegając w nim odpowiedniej modyfikacji. W kaskadzie z tym obwodem włączony jest trwale obwód pierwszego całkowania
(I INT), tworząc z nim filtr pasmowo-przepustowy CR-RC. Tę opcję ustala położenie przełącznika P-2 w pozycji „3”. Kolejne ustawienia tego przełącznika w pozycjach „4”, „5”
i „6” łączą poszczególne obwody odpowiednio w konfiguracje: CR-(RC)2, CR-(RC)3 oraz
(CR)2-RC.
Program ćwiczenia instrukcja szczegółowa
Zadanie 3.1. Pomiar przepustowości widmowej filtru
Przedmiotem pomiaru są charakterystyki amplitudowe różnych konfiguracji filtrów
wyznaczane w konwencjonalnym układzie wobulatora. W tym celu wykorzystano możliwości pomiarowe ANALIZATORA WIDMA [Tektronix - (7L5 + OPT25)].
Zestawić układ pomiarowy według rysunku 3.2, łącząc wejście filtru z wyjściem generatora sygnału o liniowo narastającej w czasie częstotliwości (OPT. 25), a wyjście wybranej
konfiguracji filtru z wejściem analizatora (7L5).
ANALIZATOR WIDMA
OPT 25
7L5
DUT 1
FILTR
„RC”
Rys. 3.2. Schemat układu do pomiaru charakterystyki amplitudowej filtrów
Ustawić przełączniki i pokrętła regulacyjne ANALIZATORA WIDMA (7L5 + OPT.25)
w wymienionych poniżej położeniach:
rozdzielczość (resolution) 300 Hz,
zakres (frequency span)
20 kHz/dz.,
poziom (reference level)
10 mV/dz.,
początek zakresu (dot frequency) 100 kHz,
szybkość przemiatania (sweep rate) max,
poziom sygnału wobulatora (tracking level) max.
21
Przeprowadzić serię pomiarów charakterystyk amplitudowych rozporządzalnych
konfiguracji filtrów dla dostępnych wartości stałych czasowych. Obserwowane na ekranie
ANALIZATORA 7L5 przebiegi charakterystyk skonfrontować z przykładowymi obliczeniami teoretycznymi.
Obliczenia takie przeprowadzić dla doraźnie wskazanego przypadku, wykorzystując
w tym celu wyposażenie komputerowe LABORATORIUM.
Zadanie 3.2. Obserwacja rozkładów widmowych szumów
Zestawić układ pomiarowy według schematu podanego na rysunku 3.3. W układzie
tym szumy z obu generatorów przekazywane są na układ badany (DUT 1) za pośrednictwem sumatora (MIESZACZA) mieszczącego się w module konstrukcyjnym
GENERATORA SZUMU CZERWONEGO (mianem szumu czerwonego przyjęto nazywać
szum o gęstości widmowej mocy odwrotnie proporcjonalnej do kwadratu częstotliwości
i oznaczać go symbolem 1/f 2).
Podłączenia obu źródeł szumu do sumatora należy dokonać, stosownie do potrzeb,
przy pomocy zewnętrznych połączeń kabelkami koncentrycznymi. Do wizualizacji i pomiaru rozkładów widmowych badanych szumów służy analizator widma Tektronix 7L5 .
GEN.SZUMU BIAŁEGO
ANALIZATOR WIDMA
7L5
DUT 1
GEN.SZUMU „1/f2”
+ MIESZACZ
FILTR „C-R” - „RC”
Rys. 3.3. Schemat układu do obserwacji rozkładów widmowych szumów
Dokonać obserwacji widm szumów w punktach węzłowych badanego układu FILTRU
(w pozycjach „1”, „2”, „3”, „4”, „5”, „6” przełącznika P-2) dla różnych (wybieranych
przełącznikiem P-1) wartości stałych czasowych w warunkach transmisji wyłącznie szumu
białego, samego szumu czerwonego, oraz sumy obu tych rodzajów szumu. W szczególności w pozycji „1” przełącznika P-2 ocenić wartość narożnej częstotliwości szumów
(noise-corner frequency), tj. częstotliwości, dla której poziomy obu składowych szumów są
takie same.
Bliższe informacje dotyczące generatorów szumu zamieszczono w dodatku A.
Zadanie 3.3. Badanie efektu „wybielania” szumu kolorowego
Zestawić układ pomiarowy według schematu podanego na rysunku 3.4. Podstawowy
moduł ćwiczeniowy (DUT 1) zastąpiono w nim prostym czwórnikiem różniczkującym
22
(DUT 2) o regulowanej w sposób ciągły stałej czasowej. Przy ustalonej wartości pojemności tego obwodu (C = 200 pF) zmianę wartości jego stałej czasowej umożliwia potencjometr
wieloobrotowy (helipot) o rezystancji regulowanej płynnie (w zakresie 0 4,7 k).
Celem tego zadania jest obserwacja widma szumów na wyjściu czwórnika C-R, na
wejście którego podano równocześnie szum biały i szum typu 1/f 2 (czerwony).
Zmieniając stopniowo wartość stałej czasowej obwodu różniczkującego uchwycić
moment „wybielania” złożonego szumu kolorowego.
GEN.SZUMU BIAŁEGO
ANALIZATOR WIDMA
7L5
DUT 2
GEN.SZUMU „1/f2”
+ MIESZACZ
CZWÓRNIK „C-R”
Rys. 3.4. Schemat układu do obserwacji efektu wybielania szumów
Odnotować wartość rezystancji helipotu i obliczyć przynależną jej wartość narożnej
szumowej stałej czasowej (noise-corner time-constant). Skonfrontować uzyskany rezultat
z wynikiem pomiaru narożnej częstotliwości szumów.
Zadanie 3.4. Pomiary poziomu sygnału i szumu
Zestawić układ pomiarowy zgodnie ze schematem podanym na rysunku 3.5.
SYNCHROSKOP
GEN.SZUMU BIAŁEGO
FILTR
GEN.SZUMU „1/f2”
+ MIESZACZ
TAS 465
„RC”
DUT 1
t
GEN.IMPULSÓW LICZNIKOWYCH
WOLTOMIERZ RMS
Rys. 3.5. Schemat układu do pomiaru stosunku sygnału do szumu
W układzie tym zespół generatorów szumu uzupełniono GENERATOREM
IMPULSÓW LICZNIKOWYCH o regulowanych parametrach sygnału: amplitudzie, czasie
narastania i czasie opadania. Sygnały wyjściowe filtru przekazywane są do dwóch rów-
23
noległych gałęzi pomiarowych: gałęzi pomiaru amplitudy przenoszonych impulsów licznikowych i wartości międzyszczytowej szumów (OSCYLOSKOP) oraz gałęzi pomiaru wartości średniokwadratowej szumów (WOLTOMIERZ RMS).
Podłączyć na wejście MIESZACZA (w module GENERATORA SZUMU CZERWONEGO) tylko GENERATOR SZUMU BIAŁEGO i dokonać następujących pomiarów:
wartości średniej kwadratowej napięcia szumów na wyjściach wszystkich możliwych do zrealizowania konfiguracji filtrów,
wartości międzyszczytowej napięcia szumów na wyjściu konfiguracji RC-CR.
Podłączyć na wejście MIESZACZA (jak uprzednio) wyłącznie generator szumu typu
1/f 2 (CZERWONEGO) i dokonać analogicznych pomiarów jak w przypadku pomiarów
szumu białego.
Podłączyć na wejście MIESZACZA tylko GENERATOR IMPULSÓW LICZNIKOWYCH
i dokonać pomiaru amplitudy impulsu licznikowego na wyjściach wszystkich możliwych
konfiguracji filtrów dla amplitudy impulsu wejściowego Vi max = 500 mV i czasu opadania to = 100 s, oraz czterech wartości czasu narastania tn = 0,05 s, 0,1 s, 0,2 s
i 0,5 s.
Rezultaty wszystkich pomiarów przedstawić tabelarycznie. Na ich podstawie obliczyć
wartości stosunku sygnału do szumu (całkowitego) SNR dla konfiguracji filtrów: CR-RC,
CR-(RC)2 oraz (CR)2-RC i wykreślić odnośne przebiegi zależności SNR = F().
Przeprowadzić pomiar sprawdzający poziomu szumu sumarycznego, podając na
wejście sumatora sygnał szumowy z obu generatorów szumu.
Obliczenia wartości SNR dla konfiguracji (CR)2-RC wykonać względem podstawowej
części impulsu bipolarnego.
Podłączyć na wejście MIESZACZA obydwa generatory szumów i generator impulsów
licznikowych. Dokonać obserwacji skażenia szumowego przenoszonych impulsów.
Przeszkicować obraz z ekranu oscyloskopu.
Wyposażenie stanowiska ćwiczeniowego
24
Moduł ćwiczeniowy: DUT 1 – FILTR (CR)m-(RC)n. (wkładka STANDARD 70)
Moduł ćwiczeniowy: DUT 2 CZWÓRNIK CR. (wkładka STANDARD 70)
Moduł GENERATORA SZUMU BIAŁEGO (wkładka STANDARD 70)
Moduł GENERATORA SZUMU 1/f 2 i MIESZACZA (wkładka systemu STANDARD)
Generator impulsów licznikowych typu RP1 (Berkeley Nucleonics Corporation)
ANALIZATOR WIDMA 7L5 + OPT.25 (Tektronix)
Woltomierz wartości średniej kwadratowej typu HP 3400 (Hewlett-Packard)
Oscyloskop pomiarowy typu TAS 465 lub TDS 220
Obudowa ZNN-41 systemu STANDARD (z zasilaczem niskiego napięcia)
Kable i przewody połączeniowe
Generator funkcji HP 33120A
Literatura pomocnicza
[1] Instrukcje obsługi aparatury pomiarowej używanej w ćwiczeniu
[2] Korbel K.: Profilaktyka i terapia antyszumowa układów elektroniki „Front-End”.
Kraków, Wyd. AGH 1997
[3] Korbel K., Dąbrowski W.: Filtracja sygnału w spektrometrycznym torze pomiarowym.
Filtry analogowe. Kraków, Wyd. AGH 1992
[4] Masny S.: Laboratoryjna aparatura techniki jądrowej na obwodach scalonych
„STANDARD”. Warszawa, OIEJ, Bibl. PTJ, Seria Aparatura i technika pomiarowa,
nr 80 (598), 1976
25
ĆWICZENIE LABORATORYJNE 4
Filtr aktywny wzmacniacza 1101
Zakres ćwiczenia
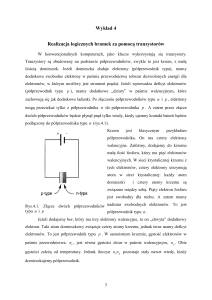
Badanie własności transmisyjnych dolnoprzepustowego filtru aktywnego (FA) w konfiguracji SallenaKeya:
pomiar charakterystyki amplitudowej filtru,
pomiar odpowiedzi filtru na wymuszenie impulsem o zaniku eksponencjalnym,
porównanie wyników pomiaru z przebiegami wyznaczonymi teoretycznie,
pomiary charakterystyk filtru złożonego CRFA.
Przedmiot ćwiczenia
Przedmiotem ćwiczenia jest układ filtru SallenaKeya w wersji zastosowanej we
wzmacniaczu kształtującym typu 1101 systemu CAMAC-POLON. Uproszczony schemat
tego układu przedstawiono na rysunku 4.1
CB
WE
R1
R2
WY
+1
CA
kV
Rys. 4.1. Schemat strukturalny filtru aktywnego SallenaKeya
Charakterystyki częstotliwościowe i impulsowe takiej konfiguracji kształtowane są
przez celowy dobór wartości parametrów elementów składowych.
W przypadku filtru wzmacniacza 1101 założono:
R = R1 = R2 = 1 k,
C = CB = 4CA (dobierane stosownie do zakresu),
kV = + 1,
przy czym iloczyn RC = i określa dominującą stałą czasową filtru.
W module ćwiczeniowym podstawową strukturę filtru uzupełniono wejściowym
wzmacniaczem szerokopasmowym (replikując w ten sposób wybrany fragment wzmacniacza 1101) oraz wejściowym obwodem różniczkującym CR umożliwiającym syntezę
filtru pasmowo-przepustowego.
26
Elementy te uwidoczniono na rysunku 4.2 przedstawiającym schemat modułu
ćwiczeniowego. W takiej też postaci zamieszczono go na płycie czołowej modułu.
-12V
10k
100
100
+12V
10n
CA
1k
_
1k
1k
BC179
HA2540
WE-1
22
+
Cd
WE-2
CB
-12V
d
WY
1k
BC179
Rd
100
10n
+12V
680
+20V
Rys. 4.2. Schemat modułu ćwiczeniowego z filtrem SallenaKeya
Warto tu przypomnieć, że w spektrometrycznym torze pomiarowym pierwotnym źródłem sygnału jest detektor promieniowania, stanowiący impulsowe źródło prądowe. Generowane w nim impulsy prądowe są wstępnie całkowane w stowarzyszonych inercyjnych
obwodach wejściowych toru pomiarowego, ulegając przekształceniu w proporcjonalne impulsy napięciowe. Traktując z kolei pierwotne impulsy prądowe jako impulsy dirakowskie
{ID(t) = Q(t)},sygnał na wejściu systemu filtracyjnego (na miarę poczynionego uproszczenia) przybiera postać ciągu impulsów heaviside’owskich {Vi(t) = Q/C H(t)}. Ta forma sygnału podlega procesowi filtracji.
Własności transmisyjne toru pomiarowego odnosić można zarówno do pierwotnego
(rzeczywistego) prądowego źródła sygnału, jak i do wtórnego (zastępczego) źródła napięciowego. Stąd też według pierwszego podejścia określana jest tzw. globalna charakterystyka impulsowa h(t), opisująca odpowiedź całego toru (od detektora do wyjścia) na jednostkowy impuls prądowy. W przypadku alternatywnym, wobec wyłączenia z toru pomiarowego układu wstępnego całkowania i wprowadzenia w jego miejsce zastępczego (wtórnego) źródła napięciowego, korzystamy z charakterystyki skokowej {R(t)} pozostałej części
toru. Dodajmy, że w konfiguracji {CR/FA} (obwód różniczkujący C-R i filtr aktywny) jest
ona równoważna odpowiedzi dolnoprzepustowego filtru aktywnego na wymuszenie impulsem o zaniku eksponencjalnym {Vi FA = 1 exp(t/RC)}. W szczególności dla badanego
układu filtru SallenaKeya opisuje ją funkcja
Rt
CR FA
3
4
t
exp
1 cos
3
RC
RC
t ,
zaś jego charakterystyka amplitudowa dana jest równaniem
F CR FA
RC
1
0,0625 RC 0,25 RC 1
4
2
1 RC 2
.
27
Program ćwiczenia instrukcja szczegółowa
Zadanie 4.1. Pomiar charakterystyki amplitudowej filtru aktywnego FA
Zestawić układ pomiarowy według rysunku 4.3. Dokonać orientacyjnych pomiarów
charakterystyk przejściowej (na częstotliwości 10 kHz)i amplitudowej (w rozporządzalnym
zakresie częstotliwości) wzmacniacza buforowego (przy wyłączonych CA i CB). Dobrać
wartości dołączanych pojemności CA i CB z warunku założonej wartości dominującej
stałej czasowej i = 1 s. Pomiary charakterystyk filtru przeprowadzić przy poziomie
sygnału wejściowego równym w przybliżeniu połowie zakresu dynamicznego układu.
HP 33120A
TDS 220
WE-1
DUT
WE-2
Rys. 4.3. Schemat układu do pomiaru charakterystyki amplitudowej
Właściwe pomiary charakterystyki amplitudowej filtru przeprowadzić przy racjonalnym pokryciu punktami pomiarowymi zakresu przenoszenia filtru; rzadszym w obszarze
płaskim, natomiast zagęszczonym przy końcu pasma przenoszenia.
W procedurze pomiarowej obejmującej wyłącznie dolnoprzepustowy filtr aktywny
FA, sygnał pomiarowy z generatora sygnału sinusoidalnie zmiennego ( HP 33120A) podać
na wejście bezpośrednie badanego układu, oznaczone symbolem WE-1. Powtórzyć taki
cykl pomiarowy dla wartości i = 2 s i 4 s.
Wykreślić przebiegi pomierzonych charakterystyk w ogólnie przyjętym sposobie
prezentacji (poziom w dB oraz częstotliwość w Hz).
Zadanie 4.2. Pomiar odpowiedzi FA na wymuszenie typu A exp( t/)
W poprzednio zestawionym układzie pomiarowym w miejsce generatora sygnału sinusoidalnie zmiennego włączyć generator impulsów o zaniku eksponencjalnym (typu RP-1
lub RP-2).
Nastawić następujące wartości parametrów sygnału:
amplituda
Vi = 100 mV,
czas narastania tr = 50 ns,
czas opadania
td = 1 s,
częstotliwość
f = 1 kHz.
28
Za pomocą oscyloskopu pomiarowego dokonać pomiaru następujących parametrów
odpowiedzi (impulsu wyjściowego):
amplitudy
Vo max,
czasu osiągnięcia maksimum tmax,
czasu osiągnięcia 1% Vmax
tre.
Pomiary przeprowadzić dla wartości i równych 1 s, 2 s i 4 s. Przerysować przebiegi odpowiedzi z ekranu oscyloskopu.
Zadanie 4.3. Pomiary charakterystyk filtru złożonego (CR)-(FA)
Przedmiotem pomiaru tego zadania ćwiczeniowego jest:
charakterystyka amplitudowa,
charakterystyka skokowa filtru.
Pomiary należy przeprowadzić w warunkach włączonego w tor sygnału (na wejściu)
dodatkowego obwodu górnoprzepustowego (CR). Obwód taki jest trwale wmontowany do
układu modułu ćwiczeniowego, a jego praktyczne włączenie w tor sygnału dokonywane
jest przez podanie sygnału pomiarowego na drugie wejście modułu oznaczone symbolem
WE-2.
Uzyskany w ten sposób filtr złożony jest filtrem pasmowo-przepustowym. Ze
względu na ustaloną a priori wartość stałej czasowej obwodu różniczkującego, równą
z założenia d = 1 s, wartość dominującej stałej czasowej filtru aktywnego (FA) należy
nastawić także równą i = 1 s.
Pomiar charakterystyki amplitudowej filtru złożonego należy przeprowadzić dokładnie według procedury zadania 4.1.
W pomiarze charakterystyki skokowej filtru złożonego przełączyć generator wielofunkcyjny HP 33120A w tryb generacji fali prostokątnej przy następujących wartościach
parametrów sygnału:
amplituda
częstotliwość
Vi = 100 mV,
f = 1 kHz.
Przerysować z ekranu oscyloskopu przebieg odpowiedzi filtru i porównać go z przebiegiem odpowiedzi samego filtru aktywnego (FA) na wymuszenie impulsem o zaniku
eksponencjalnym ze stałą czasową równą dominującej stałej czasowej filtru (uzyskanym
w pomiarze zadania 4.2).
Zadanie 4.4. Porównanie wyników doświadczalnych z obliczeniowymi
Podać ogólną postać transmitancji filtru SallenaKeya oraz wywodzące się z niej
funkcje charakterystyki impulsowej i amplitudowej.
29
Wyznaczyć funkcje odpowiedzi skokowej i charakterystyki amplitudowej filtru
złożonego. W oparciu o powyższe zależności teoretyczne, dla zadanych wartości elementów układu, zobrazować te przebiegi, korzystając z grafiki komputerowej. Sporządzić
wydruki charakterystyki i porównać je z odpowiednimi przebiegami wyznaczonymi eksperymentalnie.
Na gruncie znajomości topologii badanego układu oraz wartości elementów składowych wyznaczyć przebiegi tychże charakterystyk metodą analizy komputerowej (wg programu SPICE), sporządzić wydruki tych przebiegów i porównać je z charakterystykami
wyznaczonymi w poprzednich procedurach.
Wyposażenie stanowiska ćwiczeniowego
Moduł ćwiczeniowy: FILTR AKTYWNY WZMACNIACZA 1101
Generator sygnałów okresowo zmiennych: typ HP 33120A
Generator impulsów typu TAIL PULSE Mod. RP-1
Oscyloskop pomiarowy: typ TDS 220
Zasilacz niskiego napięcia: typ KB-60-01
Profesjonalny miernik automatyczny typu CHY 29 lub LCR-METER typu CHY 41
Komplet kondensatorów
Kable i przewody połączeniowe
Komputery z odpowiednim oprogramowaniem (w ramach ogólnego wyposażenia Laboratorium Elektroniki Jądrowej oraz Katedry Elektroniki Jądrowej)
Literatura pomocnicza
[1]
[2]
[3]
[4]
30
Białko M. (red.): Filtry aktywne RC. Warszawa, WNT 1979
Instrukcje obsługi aparatury pomiarowo-kontrolnej
Korbel K., Dąbrowski W.: Filtracja sygnału w spektrometrycznym torze pomiarowym. Filtry analogowe. Kraków, Wyd. AGH 1992
Sallen R.P., Key E.L.: A Practical Method of Designing RC-Active Filters. IRE Trans.
on Circuit Theory, CT-2, 74, 1955
ĆWICZENIE LABORATORYJNE 5
Układ wykrywania i odrzucania spiętrzeń (PUI/R)
Zakres ćwiczenia
Badanie własności układu wykrywania spiętrzeń w stochastycznym ciągu impulsów
oraz odrzucania impulsów skażonych tym efektem.
Pomiar parametrów znamionowych układu:
pomiar czasu rozdzielczego dla dwóch impulsów t res ,
pomiar interwału wykrywania (detekcji) spiętrzeń TD.
Ocena efektywności wykrywania i odrzucania spiętrzeń.
Przedmiot ćwiczenia
Przedmiotem ćwiczenia jest moduł doświadczalny układu „PUI/R” (Pile-Up Inspector/
Rejector). Rysunek 5.1 podaje ogólny schemat ideowy tego modułu, wyróżniający trzy
(oznaczone odpowiednio symbolami A, B i C) bloki funkcjonalne.
300pF
100k
1n
WE
+15 V
4
1n
100k
+ 24 V
3,5V
C
-15 V
50 ns
B
T1
100 pF
BF200
10n
120k
+5 V
1
15
14
2
3
8
16
3
2
13
SN74123
6
WY-A
WY-B
10k
1k
CX
1
2
A
RX
50k
T2
BF200
+5 V
5
3
11
10
5
R
J
K
Q
8
4
6
SN7470
1k 10n
7
200k
200k
T3
BF200
Cl
+5 V
12
KONTR. 1 (TD)
KONTR. 2
Rys. 5.1. Schemat ideowy modułu ćwiczeniowego
Podstawową jednostkę funkcjonalną modułu (blok A ) stanowi układ wykrywania
spiętrzeń w konfiguracji zaproponowanej przez C.J. Danielsa. Tworzy ją zespół cyfrowych
31
układów scalonych TTL składający się z monowibratora z impulsowym przedłużaniem
czasu regeneracji (SN 74123) oraz synchronicznego przerzutnika jednozboczowego JK
(SN 7470). Układ generuje sygnał identyfikujący i ewentualnie przedłuża go w przypadkach, gdy odległości kolejnych impulsów mieszczą się w tzw. interwale detekcji spiętrzenia. Długotrwałość tego interwału podyktowana jest szybkością zaniku impulsów
licznikowych i dopuszczalną dystorsją amplitud wywołaną ich wzajemnym nakładaniem.
W układzie ustalają ją wartości elementów biernych Rx i Cx, w obwodzie zewnętrznym
monowibratora. W tym sensie monowibrator pełni funkcję GENERATORA INTERWAŁU
DETEKCJI, przy czym rozciągłość czasowa generowanego impulsu identyfikującego
odpowiada ściśle interwałowi detekcji.
Monowibrator „wyzwalany” jest krótkimi impulsami startowymi przywiązanymi do czoła każdego impulsu licznikowego, a jego odpowiedź o czasie trwania TD przenoszona jest na wejście informacyjne J przerzutnika bistabilnego, przygotowując go z określonym opóźnieniem transmisyjnym do zmiany stanu
przewodzenia. Opóźnienie reakcji monowibratora zapobiega przełączaniu przerzutnika
równocześnie w momencie pobudzenia monowibratora. Może ono natomiast nastąpić
dopiero pod działaniem kolejnego impulsu startowego, mieszczącego się w obrębie czasowym
wygenerowanego w monowibratorze impulsu wyjściowego (tj. w interwale detekcji), który powoduje zarazem przedłużenie odpowiedzi monowibratorao wartość TD,
a w konsekwencji podtrzymanie w tym okresie zmienionego stanu przerzutnika
Dla zilustrowania podanego opisu fenomenologicznego na rysunku 5.2 przedstawiono
schematycznie przebiegi sygnałów w wyróżnionych punktach węzłowych układu.
1
t
2
T
3
T
t
D
t
4
5
t
6
t
Rys. 5.2. Diagramy przebiegów sygnałów w wybranych punktach układu
Układ wykrywania spiętrzeń (pile-up inspector) skojarzony z bramką liniową włączoną w tor sygnału spektrometru tworzy strukturę zwaną układem odrzucania spiętrzeń
(pile-up rejector). W module ćwiczeniowym zastosowano prostą bramkę równoległą na
tranzystorze T3 (blok B ). Z chwilą zmiany stanu przerzutnika podwyższony poziom na jego wyjściu Q wprowadza w stan nasycenia tranzystor T3 zwierając tym samym do masy tor
transmisji sygnału spektrometrycznego.
32
W celu uproszczenia zestawu pomiarowego moduł ćwiczeniowy wyposażono w układ
symulacji impulsów licznikowych (blok C ). W odpowiedzi na wejściowy stochastyczny
ciąg krótkotrwałych impulsów prostokątnych (ti = 60 ns, Vin – 3,5 V) „generuje” on analogiczny ciąg celowo wydłużonych impulsów o zaniku eksponencjalnym, symulujących
impulsy napięciowe sygnału spektrometrycznego. Przemiana kształtu i rozciągłości czasowej impulsów dokonywana jest w konwencjonalnym układzie pompy diodowej
współpracującej z integratorem aktywnym (UC7741). Uformowany w powyższym układzie sygnał przekazywany jest za pośrednictwem kaskady wtórników (T1 i T2) na wyjście
bezpośrednie WY-A oraz wyjście bramkowane WY-B. Umożliwiają one obserwację i pomiar odpowiednich ciągów impulsów wyjściowych. Dodatkowe gniazdo wyjściowe
(KONTR. 1) przewidziano dla pomiaru INTERWAŁU DETEKCJI. Na płycie czołowej
MODUŁU ĆWICZENIOWEGO dostępne jest również pokrętło potencjometru nastawczego
Rx obwodu ustalającego wartość czasu TD.
Program ćwiczenia instrukcja szczegółowa
Zadanie 5.1. Przygotowanie stanowiska pomiarowego
Dla wykonania zadań przewidzianych programem ćwiczenia niezbędne jest zestawienie zastępczego źródła stochastycznego ciągu impulsów na bazie rozporządzalnej,
konwencjonalnej aparatury pomiarowej.
Stosunkowo prostym w praktycznej realizacji układem generacji ciągu impulsów
o przypadkowym rozkładzie czasowym z możliwością płynnej regulacji ich średniej
częstotliwości repetycji jest tandem złożony z generatora szumu białego i dyskryminatora
progowego. Zasada pracy takiego układu oparta jest na charakterystycznym dla szumu
białego gaussowskim rozkładzie wartości chwilowych amplitud. Średnia częstotliwość
< f > przekroczenia przez szum zadanego poziomu Vprog opisana jest (patrz dodatek B)
zależnością
2
V
1 prog
f f 0 exp
,
2 V N rms
gdzie:
< f0 > tzw. pozorna częstotliwość procesu stochastycznego, tj. średnia wartość częstotliwości przejścia sygnału przez zero w kierunku jego narastania;
VNrms wartość średnia kwadratowa napięcia szumów.
Jeśli z generatorem szumu białego (GSB) skojarzyć dyskryminator progowy (DP), na
wyjściu takiego układu uzyskuje się pożądany stochastyczny ciąg impulsów standardowych
o średniej częstotliwości < f > uwarunkowanej poziomem dyskryminacji Vprog.
Według przedstawionej wyżej koncepcji zestawić tego rodzaju generator korzystając
z dostępnych MODUŁÓW FUNKCJONALNYCH, z rodziny wkładek systemu aparatury
jądrowej STANDARD-70.
33
Przeprowadzić obserwacje i pomiary testujące w układzie pomiarowym przedstawionym schematycznie na rysunku 5.3.
SYNCHROSKOP
GEN.SZUMU BIAŁEGO
TDS 220
GSB
DP-21
P-41
Rys. 5.3. Schemat układu do formowania i pomiarów ciągu impulsów przypadkowych
W szczególności:
Dokonać oceny charakteru ciągu impulsów na podstawie obserwacji oscylograficznej
na oscyloskopie z pamięcią (Tektronix TDS-220 lub 314), powtarzając kilkakrotnie
(w trybie pojedynczego wyzwalania podstawy czasu) obserwacje fragmentów generowanego ciągu.
Przeprowadzić serię pomiarów średniej częstotliwości impulsów generowanego ciągu
dla kilku wartości progu dyskryminacji.
W pomiarach posłużyć się techniką zliczania impulsów w założonym przedziale czasu, Wyniki pomiarów zestawić w tabelce oraz wykreślić w postaci charakterystyki
Vprog vs. ln < f >.
W ramach czynności przygotowawczych przetestować subukład symulacji impulsów
licznikowych (blok C) oraz ich tor transmisji do wyjścia WY-A (blok B). W tym celu
zestawić układ pomiarowy według schematu z rysunku 5.4
SYNCHROSKOP
DUT
PGP-6
TDS 220
PUI&R
Rys. 5.4. Schemat zestawu do formowania i pomiarów ciągu impulsów „licznikowych”
Oscylograf zapiąć na wyjście WY-A układu wykrywania spiętrzeń. Generator
impulsów przełączyć w tryb normalny (ciąg impulsów pojedynczych), a za pomocą jego
organów regulacyjnych nastawić następujące parametry generowanego ciągu impulsów:
34
szerokość impulsów
amplituda impulsów
polarność impulsów
częstotliwość ciągu
ti = 60 ns,
Vi = 3,5 V,
dodatnia,
f = 1 kHz.
Ustalić tryb pracy oscylografu i dobrać jego zakresy pomiarowe. Ocenić wierność
aproksymacji impulsu „licznikowego”. Dokonać pomiaru amplitudy obserwowanego impulsu, czasu jego narastania oraz stałej czasowej jego zaniku. Wyznaczyć wartość
szerokości t(1%) impulsu na poziomie 0,01 jego amplitudy.
Zadanie 5.2. Pomiar interwału detekcji spiętrzeń
W układzie pomiarowym z rysunku 5.4 przełączyć wejście oscylografu na gniazdo
wyjściowe KONTR 1 (TD) układu PUI&R. Dokonać pomiaru rozciągłości czasowej i poziomu odpowiedzi monowibratora SN 74123 na wymuszenie impulsem startowym pobieranym z generatora PGP-6. Przyjąć identyczne jak w poprzednim zadaniu pomiarowym
wartości parametrów sygnału generatora impulsów.
Dobrać zakresy pomiarowe i tryb pracy oscylografu. Za pomocą potencjometru nastawczego skorygować szerokość impulsu determinującego interwał detekcji spiętrzeń do
wartości TD = t (1%).
Zadanie 5.3. Sprawdzanie działania układu generacji sygnału wzbronienia
Do pomiaru wykorzystać ten sam zestaw pomiarowy jak w zadaniu poprzednim.
Stosownie do wymagań tego zadania podłączyć kanał I i II oscylografu odpowiednio do
gniazda WY-B oraz KONTR 1 badanego układu PUI&R oraz zmienić odpowiednio warunki pracy generatora PGP-6 i oscylografu TDS-220. Wyzwalanie podstawy czasu związać
z czołem impulsu ustalającego interwał detekcji spiętrzeń. W szczególności:
przełączyć generator impulsów PGP-6 w tryb generacji impulsów podwójnych,
przy zachowaniu poprzednich wartości ti oraz Vi zadać wartość odstępu impulsów
w parze (opóźnienie) równą ti = 0,5 ms oraz okres repetycji Ti = 5 ms.
Pomiar oscylograficzny odpowiedzi układu na wymuszenie parą impulsów przeprowadzić w trybie wyczekującej podstawy czasu synchroskopu.
Obserwując na ekranie oscylografu sygnały z wyjść WY-B i KONTR 1 układu
PUI&R stopniowo redukować wartość opóźnienia między impulsami ti aż do momentu „zetknięcia” impulsów interwału detekcji spiętrzeń. Stwierdzić czy momentowi
temu towarzyszy spowodowany wygenerowaniem impulsu wzbronienia zanik na wyjściu
WY-B drugiego impulsu pary. Dodatkowe wyjście kontrolne KONTR 2 umożliwia obserwację tego impulsu.
Zadanie 5.4. Obserwacje skutków spiętrzania impulsów
Obserwacji skutków spiętrzania impulsów dokonać w tym samym co uprzednio układzie pomiarowym. Manifestują się one na sygnałach, zarówno wejściowym, jak i wyjściowym układu PUI&R, odbieranych odpowiednio z jego gniazd WY-A oraz WY-B.
Dla przeprowadzenia obserwacji efektu spiętrzania na pierwotnym ciągu impulsów
licznikowych należy dokonać odpowiedniego przełączenia na wejściu kanału I oscyloskopu. Następnie, kontynuując zmniejszanie dystansu ti dzielącego parę impulsów gene-
35
ratora PGP-6 zaobserwować spiętrzanie impulsów na krawędzi opadającej poprzednika
(„na ogonie”) aż do nasunięcia drugiego impulsu „pary” na krawędź czołową impulsu
pierwszego. Opóźnienie ti jest wówczas równe czasowi narastania impulsów licznikowych tn.
Skutek dalszego zmniejszania odległości między impulsami „pary” można obserwować na sygnale wyjściowym układu. Należy zatem na wejście kanału I synchroskopu
doprowadzić sygnał z gniazda WY-B badanego układu. W miarę skracania interwału ti
nastąpi pogłębiająca się degradacja amplitudy wiodącego impulsu „pary” na skutek
obcinania go przez sygnał wzbronienia przed osiągnięciem wartości maksymalnej.
Przeszkicować obserwowane przebiegi ilustrujące ewolucję dystorsji przenoszonego impulsu. Sformułować i uzasadnić wnioski odnośnie ograniczeń działania układu.
Powyższe obserwacje można przeprowadzić również w warunkach równoczesnej
obserwacji obu sygnałów (z WY-A i WY-B), uzależniając wyzwalanie podstawy czasu
synchroskopu od sygnału z toru A.
Zadanie 5.5. Pomiar (inherentnego) czasu rozdzielczego dla pary impulsów
wejściowych
Do wykonania tego zadania posłużyć się również zestawem pomiarowym podanym na
rysunku 5.4. Obserwując na ekranie oscylografu sygnał wyjściowy układu PUI&R, stopniowo redukować wartość opóźnienia między impulsami pary wymuszającej, osiągając
kolejno stan „wygaszenia” drugiego impulsu pary, stopniowej degradacji i zaniku impulsu
pierwszego aż do momentu ponownego pojawienia się odpowiedzi na łączne wymuszenie
pokrywającej się niemal całkowicie pary wejściowej. Wyznaczona w ten sposób graniczna wartość opóźnienia tigr określa rozdzielczość czasową układu dla impulsów o skrajnie
niskim (zerowym) czasie narastania tn. W warunkach gdy tn > ti czas rozdzielczy podyktowany jest przez czas narastania impulsu licznikowego.
Zadanie 5.6. Ocena efektywności wykrywania/odrzucania spiętrzeń
Szkodliwym rezultatem wzajemnego nakładania się impulsów licznikowych jest
dystorsja widma amplitudowego ciągu tych impulsów. Jej wielkość i zasięg zależy zarówno
od stopnia przeciążenia częstotliwościowego (tj. od średniej częstotliwości impulsów), jak
też od charakteru impulsu (bez przerzutu lub z przerzutem).
Prostym sposobem jakościowej oceny działania układu odrzucania spiętrzeń jest porównanie spektrogramu ciągu obarczonego spiętrzeniami, uzyskanego w warunkach eliminacji spiętrzeń, z analogicznym spektrogramem zdjętym w warunkach braku odrzucania
spiętrzeń. Dla oceny skuteczności działania badanego układu PUI&R posłużyć się podanym wyżej sposobem. W tym celu należy dokonać pomiaru rozkładów amplitudowych
ciągu impulsów przypadkowych w podanych wyżej warunkach alternatywnych, dla dwóch
wartości średniej częstotliwości impulsów: < f1 > = 1 kHz i < f2 > = 100 Hz, korzystając
z (zestawionego uprzednio) układu pomiarowego podanego na rysunku 5.5
36
SYM.IMP.LICZN.
GEN.SZUMU
GSB
DP-21
GEN.IMP.PRZYPADKOWYCH
A-22
PUI
BR
P-41
ANALIZATOR AMPLITUDY
DUT
Rys. 5.5. Schemat zestawu pomiarowego do oceny efektywności działania układu PUI/R
Pomiary takie należy wykonać rutynową metodą „punkt po punkcie”, wykorzystując
w tym celu uwidoczniony na schemacie układu pomiarowego zestaw ANALIZATORA
AMPLITUDY. Dobrać czas akumulacji zliczeń w przeliczniku kierując się wymogiem uzyskania dokładności pomiaru na poziomie 1%. Szerokość okna analizatora przyjąć na poziomie 200 mV. Przy nastawianiu wartości częstotliwości ciągu impulsów przypadkowych
skorzystać z krzywej kalibracyjnej (Vprog ln < f >) wyznaczonej w ramach zadania 5.1.
Skomentować uzyskane rezultaty oraz przedstawić je tabelarycznie i graficznie.
Wyposażenie stanowiska ćwiczeniowego
Moduł ćwiczeniowy: UKŁAD WYKRYWANIA I ODRZUCANIA SPIĘTRZEŃ PUI&R
Moduł ćwiczeniowy: GENERATOR SZUMU BIAŁEGO GSB
Dyskryminator progowy DP-21 wkładka STANDARD 70
Obudowa systemu STANDARD 70 z zasilaczem niskiego napięcia
Przelicznik impulsów P-41 samodzielna jednostka systemu STANDARD 70
Generator impulsów PGP-6
Oscyloskop cyfrowy TDS-220 (Tektronix)
Analizator jednokanałowy A-22 wkładka systemu STANDARD 70
Kable i przewody połączeniowe
Literatura pomocnicza
[1] Daniels C.J.: An integrated circuit pile-up rejector. The Review of Scientific Instruments, vol. 46, No.1, 1975, 102
[2] Gillespie A.B.: Signal, Noise and Resolution in Nuclear Counter Amplifiers. Oxford,
London, New York, Paris, Pergamon Press 1953
[3] Gray T.S., Walker R.M.: Design of a retriggerable IC one-shot. IEEE Journal of Solid
State Circuits, vol. SC-5, No. 4, 1970, 141
[4] Instrukcje fabryczne pomocniczej aparatury elektronicznej.
[5] Korbel K.: Elektronika jądrowa. Cz. II. Układy elektroniki jądrowej. Kraków, Wyd.
AGH 1985
[6] Korbel K.: Monowibrator s impulsnym udlinienijem gienierirujemych impulsow. Pribory i Tiechnika Ekspierimienta, Nr 6, 113, 1968
37
ĆWICZENIE LABORATORYJNE 6
Pasywne układy przywracania poziomu zerowego (BLR)
Zakres ćwiczenia
Badanie efektu przesuwania poziomu podstawy impulsu przez czwórnik różniczkujący CR.
Badanie własności pasywnych układów przywracania poziomu zerowego (BLR Base Line Restorer).
Pomiar zależności przesunięcia linii podstawy impulsu Vo od częstotliwości repetycji f przy założonej szerokości impulsu ti.
Przedmiot ćwiczenia
Przedmiotem ćwiczenia są dwie wersje układów pasywnych przeznaczonych odpowiednio do minimalizacji efektu przesunięcia podstawy impulsów monopolarnych i bipolarnych. Pierwszą stanowi układ z diodą obcinającą, drugą natomiast układ dwudiodowy
według koncepcji Robinsona. Schematy obu tych konfiguracji, zmontowanych we wspólnym module ćwiczeniowym, przedstawiono odpowiednio na rysunku 6.1.
+12 V
b)
28 k
C6V2
30
BC159
a)
I1
1n
C
WE
1k
10
R
W
D2
D1
D
WY
WE
1n
I2
100k
WY
Uod
n.
100k
30
BC109
1k
56k
C6V2
10
- 12 V
C
Rys. 6.1. Schemat układów modułu ćwiczeniowego: a) prostego obcinacza diodowego; b) dwudiodowego restorera pasywnego w konfiguracji Robinsona.
38
Pierwszy z nich wyposażono w wyłącznik (W ) umożliwiający odłączenie diody
obcinającej (D), drugi natomiast w zespół gniazd dla ewentualnego pomiaru kontrolnego
prądów I1 i I2 obu tranzystorów.
Program ćwiczenia instrukcja szczegółowa
Zadanie 6.1. Badanie efektu przesunięcia linii zerowej w obwodzie C-R
Zestawić układ pomiarowy według schematu podanego na rysunku 6.2, wstawiając
jako blok oznaczony symbolem DUT układ z diodą obcinającą Wyłącznik W w gałęzi
diody przełączyć w pozycję „WYŁ”.
PGP-6
TDS 220
A
RP-1
B
DUT
Rys. 6.2 Schemat zestawu do badania przesunięcia linii zerowej w czwórniku C-R
Generator impulsów PGP-6 przełączyć w tryb generacji ciągu impulsów polarności
dodatniej o amplitudzie Vmax = 5 V i szerokości ti = 5 s. Obserwacje i pomiary przeprowadzić dla częstotliwości repetycji impulsów f = {1, 5, 10, 50 i 100} kHz.
Przedmiotem pomiarów oscyloskopowych jest kształt odpowiedzi czwórnika C-R oraz
przesunięcie linii zerowej VO ciągu impulsów (pomiar w kanale B oscyloskopu TDS 220).
Obydwa wejścia (A i B) oscyloskopu winny być przełączone w pozycję sprzężenia bezpośredniego (stałoprądowego).
Wyniki pomiarów zestawić w tabelce [ f VO ] oraz przedstawić w formie wykresu
zależności VO od log f .
Zadanie 6.2. Badania własności układu z diodą obcinającą (C-R-D)
Zakres tego zadania obejmuje badania odpowiedzi układu skracającego z diodą obcinającą (C-R-D) na trzy rodzaje impulsów wejściowych: monopolarnego impulsu o polarności dodatniej, monopolarnego impulsu o polarności ujemnej oraz impulsu bipolarnego.
W przypadkach impulsów monopolarnych badania należy przeprowadzić w układzie pomiarowym stosowanym w zadaniu 6.1 w warunkach włączonej diody obcinającej (z zamkniętym wyłącznikiem W ).
39
Zadanie 6.2a. Badanie odpowiedzi układu C-R-D na impulsy dodatnie
Wykonać serie pomiarów według programu zadania 6.1 dla ciągu monopolarnych impulsów, dodatnich.
Przerysować przebieg odpowiedzi układu.
Rezultaty pomiarów przesunięcia linii zerowej przedstawić w takiej samej formie jak
w zadaniu 6.1.
Zadanie 6.2b. Badanie odpowiedzi układu C-R-D na impulsy ujemne
Podać na wejście badanego układu ciąg impulsów o polarności ujemnej i małej częstotliwości repetycji (np. f = 1 kHz).
Zaobserwować przebiegi odpowiedzi układu dla różnych szerokości impulsów wejściowych.
Przerysować i skomentować kształt odpowiedzi.
Zadanie 6.2c. Badanie odpowiedzi układu C-R-D na impulsy bipolarne
Uzupełnić zestaw pomiarowy dodatkowym podzespołem funkcjonalnym służącym do
formowania impulsów bipolarnych. Stanowi go układ ze zwartą linią opóźniającą
o czasie opóźnienia TD = 2,5 s i impedancji charakterystycznej Z0 = 1 k. Schemat
zmodyfikowanego w ten sposób zestawu pomiarowego przedstawiono na rysunku 6.3.
PGP-6
TDS 224
A
B
SONDA
1k
DL
TD, Zo
DUT
Rys. 6.3. Schemat zestawu do obserwacji odpowiedzi obcinacza na impulsy bipolarne
Dokonać obserwacji przebiegów wejściowych i wyjściowych ciągu impulsów o amplitudzie V max = 5 V (dowolnej polarności), szerokości ti = 5 s i częstotliwości repetycji f = 1 kHz.
Przerysować obserwowane przebiegi i skomentować ich charakter.
Zadanie 6.3. Badanie własności układu Robinsona
40
Zewrzeć do masy gniazdo oznaczone symbolem „Uod” ustalając wartość spoczynkową napięcia wyjściowego na poziomie potencjału masy.
Sprawdzić rozpływ prądów w gałęziach zasilających źródeł prądowych włączając do
ich obwodów (w punktach oznaczonych symbolicznie „I1” i „I2”) mikroamperomierze o zakresie pomiarowym ok. 200 A. W razie potrzeby skorygować wartości prądów za pomocą potencjometru nastawczego w obwodzie emitera „górnego” źródła
prądowego (I1).
Wykonać serie pomiarów poziomu przesunięcia linii zerowej dla ciągu impulsów
monopolarnych i bipolarnych, odpowiednio w układzie z rysunku 6.2 lub 6.3, przyjmując następujące wartości parametrów sygnału wejściowego: Vm = 5 V, ti = 5 s
oraz f = {1, 5, 10, 50, 100} kHz.
Wyniki pomiarów przedstawić w formie tabelarycznej i wykreślnej.
Wyznaczyć doświadczalnie maksymalną częstotliwość impulsów, przy której przesunięcie poziomu zerowego nie przekracza założonej wartości (przykładowo 25 mV).
Rezultat pomiaru skonfrontować z wartością obliczeniową.
Wyposażenie stanowiska ćwiczeniowego
Moduł ćwiczeniowy: UKŁADY PRZYWRACANIA POZIOMU ZEROWEGO
Generator impulsów typu PGP-6
Oscyloskop typu TDS 224 z sondą pomiarową
Moduł ćwiczeniowy: LINIA OPÓŹNIAJĄCA
Zasilacz niskiego napięcia typu KB-60-01
Woltamperomierze uniwersalne
Kable i przewody połączeniowe
Przystawka formująca impulsy „licznikowe” (unipolarne i bipolarne)
Literatura pomocnicza
[1] Instrukcje pomocniczej aparatury pomiarowej
[2] Korbel K.: Elektronika jądrowa. Cz. II. Układy elektroniki jądrowej. Kraków, Wyd.
AGH 1985
[3] Kowalski E.: Elektronika Jądrowa. Warszawa, OIEJ, Dodatki do Postępów Techniki
Jądrowej, nr 76 (559), 1973
[4] Nicholson P.W.: Nuclear Electronics. London, New York, Sydney, Toronto John Wiley & Sons 1974
[5] Robinson L B.: Reduction of Baseline Shift in Pulse-Amplitude Measurements. Rev.
Sci. Instr., vol. 32, 1961, 1057
41
ĆWICZENIE LABORATORYJNE 7
Przedwzmacniacz ładunkowy
Zakres ćwiczenia
Pomiar podstawowych parametrów znamionowych przedwzmacniaczy ładunkowych;
zapoznanie się z odnośnymi przepisami normalizacyjnymi.
W zakres ćwiczenia wchodzą następujące procedury pomiarowe:
pomiar czułości ładunkowej (energetycznej) kq,
pomiar rozmycia szumowego 1/2 i rozdzielczości energetycznej (FWHMSi) przedwzmacniacza,
pomiar pojemnościowego przyrostu rozdzielczości energetycznej (FWHM).
pomiar pojemności dynamicznej Cdyn,
pomiar czasu narastania tn i opadania to odpowiedzi wzmacniacza.
Przedmiot ćwiczenia
Przedmiotem ćwiczenia jest laboratoryjny model przedwzmacniacza ładunkowego
w wersji z „rezystywną” pętlą ładunkowego sprzężenia zwrotnego. Jego schemat ideowy
przedstawiono na rysunku 7.1.
+14V
0.1
50
5k
2k2
2k7
18k
0.1
18k
2p
KONTR
2N3964
DŁ
1H
100
1n
2.2
T5
2N3505
330
C*
T1
WE
50
T4
T3
2N3964
T2
2N3823
0.1
470
2N2484
50
100
100
18k
1
WY
50
108
18k
0.1
5k6
2
2k7
50
100
-14V
0.1
Rys. 7.1. Schemat ideowy badanego przedwzmacniacza ładunkowego
Sekcję wejściową wykonano w układzie konwencjonalnym. Obejmuje ona w pierwszym stopniu tranzystor polowy JFET-T1 z obciążeniem dławikowym (DŁ) oraz w stopniu
drugim, tranzystor bipolarny T2 pracujący w układzie OB (ze wspólną bazą). Sekcję
42
wyjściową tworzy kaskada tranzystorów T3, T4 oraz T5 stanowiąca wzmacniacz o wzmocnieniu jednostkowym (kv = 0,9999), „bootstrapujący” rezystor obciążenia tranzystora T2.
Układ ten jest wzorowany na oryginalnym projekcie E. Coiantego.
Program ćwiczenia instrukcja szczegółowa
Zadanie 7.1. Pomiar czułości ładunkowej i energetycznej
Zestawić układ pomiarowy według schematu podanego na rysunku 7.2.
ORTEC 419
Co
KONTR
DUT
TAS 465
PRZEDWZMACNIACZ ŁADUNKOWY
z wbudowanym
„ADAPTOREM ŁADUNKOWYM”
Rys. 7.2. Schemat zestawu do pomiaru czułości ładunkowej przedwzmacniacza
Dla założonej wartości amplitudy sygnału wejściowego Vp pobieranego z generatora
impulsów wzorcowych ORTEC 419 dokonać pomiaru amplitudy odpowiedzi Vo max
przedwzmacniacza za pomocą synchroskopu pomiarowego TAS 465. Pomiar ten wykonać dla kilku różnych poziomów sygnału wejściowego mieszczących się w zakresie
liniowej pracy przedwzmacniacza (20 100 mV).
Wzmocnienie (czułość) ładunkowe wyznaczyć na podstawie definicji tej wielkości,
przy czym ładunek wejściowy iniekowany poprzez adaptor ładunkowy Qi określa prosty
związek
Q i Vi C 0 ,
gdzie:
C0 pojemność przelotowa adaptora ładunkowego,
Vp amplituda impulsu napięciowego generatora wzorcowego.
Na podstawie uzyskanych danych pomiarowych wyznaczyć wartość czułości energetycznej odniesionej do detektora krzemowego ( WSi = 3,6 eV/ parę e-h), zgodnie z relacją
ASi 4,44
Vo max
VpC0
[mV/MeV]
przy czym amplituda impulsu generatora wzorcowego Vp oraz impulsu wyjściowego
Vo max wyrażone są w mV, zaś pojemność adaptora ładunkowego C0 w pF.
43
Zadanie 7.2. Pomiar energetycznej zdolności rozdzielczej
Pomiar ten jest równoznaczny z pomiarem rozmycia szumowego przedwzmacniacza.
Międzynarodowe zalecenia normalizacyjne przewidują dwie metody pomiarowe: metodę
wielokanałowego analizatora amplitudy oraz metodę woltomierza wartości średniej
kwadratowej i oscyloskopu.
Stanowisko ćwiczeniowe wyposażone jest w aparaturę do pomiaru drugą z wymienionych metod. Schemat układu pomiarowego według tej metody podano na rysunku 7.3
ORTEC 450
ORTEC 419
KONTR
Co
DUT
TDS 220
Rys. 7.3. Schemat zestawu do pomiaru energetycznej zdolności rozdzielczej przedwzmacniacza
Procedura pomiarowa obejmuje dwa etapy. W pierwszym dokonuje się pomiaru
wartości średniokwadratowej napięcia szumów VN rms na wyjściu toru pomiarowego (tj. na
wyjściu wzmacniacza kształtującego) przy odłączonym generatorze impulsów wzorcowych. W drugim etapie, przy zachowaniu takich samych warunków pracy wzmacniacza
głównego, przeprowadzany jest pomiar amplitudy impulsu wyjściowego wzmacniacza
głównego Vo max stanowiącego odpowiedź na wejściowy impuls wzorcowy Vp. Pomiar ten
wykonywany jest za pomocą oscyloskopu pomiarowego.
Przeprowadzić kilka pełnych cykli pomiarowych dla różnych wartości stałych czasowych wzmacniacza głównego (kształtującego) w warunkach identyczności stałych
czasowych różniczkowania i całkowania.
Obliczyć wartości FWHMSi dla wybranych wartości stałych czasowych = d = i
korzystając z formuły
C0 V p VNrms
[keV],.
FWHM Si 0,053
Vo max
gdzie:
Vp, VN rms w mV,
C0 w pF,
Vo max w V.
Rezultaty pomiarów przedstawić w formie wykresu zależności FWHMSi od wartości stałej
czasowej .
Zadanie 7.3. Pomiar przyrostu pojemnościowego „rozmycia szumowego”
Pomiary przeprowadzić w tym samym układzie pomiarowym (rys. 7.3) dla szeregu
dołączanych na wejście (WE) przedwzmacniacza dodatkowych pojemności. Wykonać je
44
przy stałych czasowych wzmacniacza głównego równych d = i = 2 s. (Uwzględnić
wpływ pojemności szeregowej 1 nF w tej gałęzi przedwzmacniacza!).
Wyniki pomiarów zestawić tabelarycznie i przedstawić w formie wykresu zależności
rozmycia szumowego (FWHM) od pojemności wejściowej.
Zadanie 7.4. Wyznaczenie pojemności dynamicznej przedwzmacniacza
Podstawę do wyznaczenia wejściowej pojemności dynamicznej przedwzmacniacza
stanowią podstawowe formuły wynikające z analizy sygnałowej układu, a mianowicie:
Cdyn = (1+Kv) CF,
Kq
KV
V
o ,
C B 1 K V CT Qi
gdzie:
Cdyn wyznaczana pojemność dynamiczna,
CB układowa pojemność równoległa,
CF pojemność w pętli sprzężenia zwrotnego,
Kv
wzmocnienie sekcji ładunkowej w otwartej pętli,
Vo
napięcie wyjściowe przedwzmacniacza,
Qi
ładunek wejściowy iniekowany do wzmacniacza.
Cykl pomiarowy obejmuje dwie identyczne procedury pomiarowe w warunkach takiego samego wymuszenia (Qi = const); pierwszą bez dołączanej pojemności zewnętrznej
i drugą przy dołączonej dodatkowej pojemności wejściowej.
Oznaczając symbolem Vo1 napięcie wyjściowe otrzymywane w pierwszym przypadku tj. dla CB = 0 , zaś symbolem Vo2 napięcie wyjściowe w przypadku drugim, na
podstawie podanych wyżej zależności można wyznaczyć następującą formułę
C dyn C B
Vo 2
.
Vo1 Vo 2
Pomiary powyższe przeprowadzić w układzie podanym na rysunku 7.2
Przy dostatecznie dużej wartości współczynnika wzmocnienia napięciowego KV
czułość ładunkowa (wzmocnienie ładunkowe) z dobrym przybliżeniem można wyrazić jako
odwrotność pojemności CF. Na miarę tego przybliżenia można zatem wyznaczyć wartość
współczynnika KV , korzystając z formuły opisującej zależność pojemności dynamicznej od
KV i CF.
Wyznaczone w powyższych procedurach wartości KV i CF przy zadanej wartości
CB pozwalają ocenić zapas wzmocnienia przedwzmacniacza Kres.
Rezultaty pomiarów i odnośnych obliczeń zestawić w tabelce.
45
Zadanie 7.5. Pomiar czasu narastania i zaniku impulsu wyjściowego
Pomiarów dokonać w układzie zestawionym do pomiaru czułości ładunkowej (według rys. 7.2), odczytując z ekranu oscyloskopu współrzędne czasowe impulsu wyjściowego niezbędne dla obliczenia wartości wyznaczanych parametrów.
Czas narastania tn wyznaczyć według kryterium 10 i 90% amplitudy impulsu, natomiast czas zaniku to według kryterium spadku poziomu sygnału do 1% amplitudy.
Ze względu na subiektywność odczytów powtórzyć powyższe pomiary wielokrotnie
i wyznaczyć wartości oczekiwane zgodnie z zasadami opracowywania wyników pomiaru.
Wyposażenie stanowiska ćwiczeniowego
Przedwzmacniacz ładunkoczuły (DUT)
Wzmacniacz kształtujący: typ ORTEC 450 (Research Amplifier)
Oscyloskop pomiarowy: typ TDS 220
Woltomierz wartości średniokwadratowej: typ HP 3400 (RMS Voltmeter)
Generator impulsów wzorcowych typu ORTEC 419
Zasilacz niskiego napięcia: typ HP E3630A
Komplet pojemności zakapsułowanych w obudowie wtyku BNC
Literatura pomocnicza
[1]
Dąbek T., Korbel K.: Parametry przedwzmacniaczy ładunkowych i metody ich pomiarów. Raport INT 141/E, Kraków 1979
[2] Electrical Measuring Instruments Used in Connection with Ionizing Radiation. Draft
- Standard test procedures. Amplifiers and preamplifiers for semiconductor radiation
detectors. Genewa, International Technical Commission. Technical Committee
No. 45
[3] Korbel K.: Elektronika jądrowa. Cz. II. Układy elektroniki jądrowej. Kraków, Wyd.
AGH 1985
[4] Korbel K.: Układy elektroniki „Front-End”. Kraków, UWND AGH 2000
46
ĆWICZENIE LABORATORYJNE 8
Układy koincydencyjne
Zakres ćwiczenia
Pomiary podstawowych parametrów znamionowych układów koincydencyjnych.
Pomiar współczynnika wyboru układu koincydencyjnego.
Pomiar czułości koincydencji.
Wyznaczenie krzywej koincydencji opóźnionych; pomiar czasu rozdzielczego.
Pomiar czasu martwego.
Przedmiot ćwiczenia
Przedmiotem ćwiczenia są dwa rodzaje układów koincydencyjnych:
1)
trójkanałowy, równoległy układ Rossiego z kanałem koincydencyjno-antykoincydencyjnym;
2) układ mostkowy Schradera.
Schematy obu tych konfiguracji przedstawiono odpowiednio na rysunkach 8.1 i 8.2.
Układ Rossiego umożliwia trzy tryby pracy:
1)
2)
3)
praca w systemie koincydencji dwusygnałowej (2-kanałowej),
praca w systemie koincydencji trójsygnałowej (3-kanałowej),
praca w systemie koincydencyjno-antykoincydencyjnym.
W przypadku 1) i 3) przełącznik [ K-AK] jest utrzymywany w pozycji [KA], natomiast w przypadku 2) w położeniu [K]. Zasadniczy układ koincydencyjny, wykonany na tranzystorach T1 , T2 i T3 , jest uzupełniony stopniem wtórnikowym na tranzystorze T4.
AK
K
+7 V
1k
390 k
10k
10k
0.3
10k
WE1K
T4
0.3
WY
WE2K
47k
0.3
WE3
T1
T2
T3
100
K/AK
0.3
Rys. 8.1. Schemat układu koincydencyjnego/antykoincydencyjnego wg Rossiego
47
Układ Schradera wykonano w formie zmodyfikowanej z odbiorem sygnału z mostka
za pośrednictwem różnicowego wzmacniacza operacyjnego.
WE-1
R1
D1
500
WE-2
R
0.3
R2
D2
500
WY
R3
D3
1k
R
0.3
Rys. 8.2. Schemat układu koincydencyjnego wg Schradera
UWAGA
Przedstawione na rysunkach 8.1 i 8.2 konfiguracje stanowią podstawowe człony
funkcjonalne układów koincydencyjnych określane mianem UKŁADÓW WYBIERAJĄCYCH (UW ). Pełny układ koincydencyjny zawiera nadto regeneracyjny stopień
formujący, z reguły wykonany w formie monowibratora z progiem wyzwalania
(dyskryminatora progowego).
Program ćwiczenia instrukcja szczegółowa
Zadanie 8.1. Pomiar współczynnika wyboru
Zestawić układ pomiarowy według rysunku 8.3
PGP-6
TDS 220
„x”
DP-21
P-44
1
2
3
UW
Rys. 8.3 Schemat zestawu do badania własności układów koincydencyjnych
Za pomocą organów regulacyjnych generatora impulsów PGP-6 przełączyć tryb jego
pracy w pozycję IMPULSY POJEDYNCZE oraz nastawić następujące wartości parametrów generowanego sygnału:
48
dla układu Rossiego:
Vg = 2,0 V,
ti = 5,0 s,
f = 10 kHz;
dla układu Schradera:
Vg = + 2,0 V,
ti = 5,0 s,
f = 10 kHz.
Dokonać pomiaru amplitudy odpowiedzi UKŁADU WYBIERAJĄCEGO Vn dla warunku pełnej koincydencji, tj. przy podaniu impulsów generatora na oba wejścia układu,
oraz odpowiedzi Vn-1 dla przypadku krotności koincydencji k = (n 1).
Obliczyć według definicji wartość współczynnika wyboru .
W przypadku układu mostkowego Schradera poziom odpowiedzi Vn-1 można sprowadzić do zera poprzez staranne zrównoważenie mostka. Dokonuje się tego za pomocą
regulowanego rezystora R3. Ze względu na brak ścisłego pokrywania się charakterystyk
V-I diod wartość R3 zapewniająca zbalansowanie mostka zależy od amplitudy sygnału
wejściowego. Pomiar współczynnika wyboru przeprowadzić w warunkach niezupełnego
zrównoważenia.
Zadanie 8.2. Pomiar czułości koincydencji
Pomiar przeprowadzić w identycznym jak poprzednio układzie pomiarowym, przyjmując za początkowe wartości parametrów sygnału ustalone procedurą pomiaru współczynnika wyboru.
Poczynając od zadanego, początkowego poziomu sygnału wejściowego zmniejszać
stopniowo amplitudę impulsów generatora aż do momentu zaniku odpowiedzi układu
wybierającego. Ta graniczna wartość poziomu sygnału wyznacza czułość koincydencji
badanego układu. Podana procedura dotyczy bez żadnych uwarunkowań układu
koincydencyjnego Rossiego.
W układzie Schradera nie występuje efekt zaniku odpowiedzi członu wybierającego.
Czułość koincydencji można w tym przypadku wyznaczyć w pełnym układzie koincydencyjnym obejmującym prócz członu wybierającego UW również dyskryminator progowy. Dla wykonania pomiaru należy przenieść punkt obserwacji odpowiedzi z wyjścia
członu wybierającego na wyjście dyskryminatora DP-21 (punkt „x” na rys. 8.3)
Zadanie 8.3. Wyznaczanie krzywej koincydencji opóźnionych
Rozbudować układ pomiarowy do postaci podanej na rysunku 8.4. W układzie tym
zastosowano dwa identyczne generatory impulsów typu PGP-6, stanowiące rozdzielne
źródła sygnału obu kanałów układu koincydencyjnego. Pierwszy generator pracuje w systemie autogeneracji, dając na swym wyjściu impulsy pomiarowe i dostarczając nadto
49
impulsowego sygnału odniesienia dla wyzwalania drugiego generatora. Drugi generator
pracuje w trybie sterowania zewnętrznego, replikuje więc z regulowanym opóźnieniem
identyczny ciąg impulsów wejściowych dla drugiego kanału układu koincydencyjnego.
PGP-6 (I)
TDS 220
A
B
PGP-6 (II)
„x”
DP-21
1
2
3
P-44
UW
Rys. 8.4. Schemat zestawu do pomiaru krzywej koincydencji opóźnionych
Zespół generatorów PGP-6 dostarcza w rezultacie dwa czasowo powiązane ciągi impulsów umożliwiające wyznaczenie krzywej koincydencji opóźnionych.
Dwukanałowy synchroskop TDS 220 służy do pomiaru parametrów impulsów
(amplitudy, czasu trwania i wzajemnego opóźnienia) obu tych ciągów. Po ustaleniu
rekomendowanych wartości wymienionych parametrów wejście B oscyloskopu należy
przełączyć na wyjście układu wybierającego UW . Odpowiedź układu wybierającego podlega wówczas równoczesnej wizualizacji oscyloskopowej oraz rejestracji cyfrowej w przeliczniku P-44.
Pomiary przeprowadzić przy następujących wartościach parametrów sygnału:
dla układu Rossiego:
Vg = 2,0 V,
ti = 5,0 s,
f = 10 kHz;
dla układu Schradera:
Vg = + 2,0 V,
ti = 5,0 s,
f = 10 kHz.
Próg dyskryminacji dyskryminatora DP-21 ustawić na poziomie równym połowie
amplitudy odpowiedzi układu wybierającego uzyskiwanej w warunkach pełnej koincydencji.
Nastawić tryb pracy przelicznika P-44 w pozycji PRESET TIME (przedwybór czasu
zliczania) oraz wartość czasu zliczania tak równą 10 s.
50
Dokonać pomiaru ilości zliczeń N w założonym interwale akumulacji tak dla różnych wartości opóźnienia impulsów w jednym z kanałów układu wybierającego UW
(połączonym z generatorem II). Przedziały opóźnień dobrać z uwzględnieniem czasu trwania impulsów i pokryć je w miarę równomiernie dziesięcioma punktami pomiarowymi.
Przełączyć generatory impulsów w alternatywny tryb sterowania UW przez zamianę
połączeń generatorów z wejściami WE-1 i WE-2 i powtórzyć pomiary według podanego
wyżej przepisu. Wykreślić krzywą koincydencji opóźnionych i wyznaczyć wartość czasu
rozdzielczego.
W dodatku C podano alternatywną metodę wyznaczania czasu rozdzielczego układu
koincydencyjnego.
Układ pomiarowy z dwoma sprzężonymi generatorami umożliwia ciągłą regulację
czasu późnienia TD. Znana z podręczników, konwencjonalna metoda pomiaru krzywej
koincydencji opóźnionych korzysta z jednego tylko generatora oraz linii opóźniającej
z odczepami. Sposób ten, zilustrowany schematycznie na rysunku 8.5, charakteryzuje się
skokową zmianą czasu TD.
KANAŁ 1
PGP-6
KANAŁ 2
Z0
DL
Z0
Rys. 8.5. Konwencjonalny sposób realizacji opóźnienia impulsów wejściowych
stosowany w pomiarach krzywej koincydencji opóźnionych
Zadanie 8.4. Pomiar czasu martwego
Pomiaru tego parametru dokonać tylko dla układu Rossiego korzystając z zestawu
pomiarowego z rysunku 8.3. Jedyną zmianą jaką należy w tym przypadku wprowadzić
jest przeniesienie punktu „obserwacji” oscyloskopowej odpowiedzi układu koincydencyjnego z wyjścia układu wybierającego UW na wyjście dyskryminatora amplitudy
DP-21 (punkt „x” na schemacie).
Przełączyć generator PGP-6 w tryb generacji impulsów „podwójnych”. Nastawić następujące wartości parametrów impulsów generatora:
Vg = 2,0 V,
ti = 200 ns,
fg = 10 kHz.
Obserwując na ekranie oscyloskopu odpowiedź pełnego układu koincydencyjnego
(UW + DP-21), zwiększać stopniowo wzajemne przesunięcie czasowe generowanej pary
impulsów poczynając od wartości minimalnej aż do momentu pojawienia się odpowiedzi
wyraźnie replikującej formę wymuszenia. Dokonać pomiaru oscyloskopowego tego
dystansu czasowego pary impulsów wejściowych, który reprezentuje w istocie czas martwy
układu tm.
51
Zadanie 8.5. Sprawdzenie działania układu Rossiego w trybie koincydencji
3-kanałowej i antykoincydencji
Kierując się podanym wcześniej ogólnym opisem 3-kanałowego układu Rossiego
zaproponować sposób pomiaru w warunkach koincydencji trójsygnałowej oraz koincydencji dwusygnałowej ze wzbronieniem antykoincydencyjnym. Sprawdzić działanie układu w obu trybach pracy.
Wyposażenie stanowiska ćwiczeniowego
Moduł ćwiczeniowy: UKŁAD KOINCYDENCYJNY ROSSIEGO
Moduł ćwiczeniowy: UKŁAD KOINCYDENCYJNY SCHRADERA
Generatory impulsów typu PGP-6
Synchroskop pomiarowy typu TDS 220
Dyskryminator progowy typu DP-21
Przelicznik impulsów typu P-44
Zasilacz niskiego napięcia typu HP E3630 lub KB-60-01
Kable i przewody połączeniowe
Literatura pomocnicza
[1]
[2]
[3]
[4]
52
Korbel K.: Elektronika jądrowa. Cz. III. Układy i systemy elektroniki jądrowej. Kraków, Wyd. AGH 1987
Kowalski E.: Elektronika jądrowa. Warszawa, OIEJ 1973
Massalski J.M.: Detekcja promieniowania jądrowego. Warszawa, PWN 1959
Sanin A.A.: Elektroniczne przyrządy fizyki jądrowej. Warszawa, WN 1964
ĆWICZENIE LABORATORYJNE 9
Integratory liniowe
Zakres ćwiczenia
Praktyczne zaznajomienie się z podstawowymi konfiguracjami analogowych integratorów liniowych, pomiar ich współczynników konwersji, czasowej zdolności rozdzielczej, nieliniowości całkowej, oraz wyznaczenie nominalnego (roboczego) zakresu
pomiarowego.
Przedmiot ćwiczenia
Przedmiotem ćwiczenia są cztery konfiguracje konwerterów częstotliwość-napięcie
stosowane w komercyjnych układach analogowych integratorów impulsów. Dwie z nich
stanowią układy z iniekcją standardowych porcji ładunku do obwodu całkującego za
pośrednictwem kluczowanych źródeł prądowych. Kolejne dwie, to klasyczny układ
ElmoraSandsa oraz bardziej zaawansowany układ Cooke’aYarborough i Pulsforda, wykorzystujące do dozowania ładunku pompy diodowe. Wymienione dwie grupy układowe
zostały zmontowane w formie oddzielnych modułów ćwiczeniowych.
Rysunek 9.1 przedstawia schematy ideowe integratorów pierwszego typu w oryginalnych wersjach układowych zastosowanych odpowiednio w torze liniowym INTEGRATORA
LINIOWO-LOGARYTMICZNEGO ILL-41 systemu STANDARD-70 (układ A), oraz w INTEGRATORZE LINIOWYM typu 1301-A systemu CAMAC (układ B). Podstawowe struktury,
stanowiące właściwy przedmiot ćwiczenia uzupełniono – ujętymi w ramki – stowarzyszonymi subukładami funkcjonalnymi związanymi bądź z ekstrakcją sygnału wyjściowego (A) bądź z poprawą liniowości charakterystyki (B).
W obu konfiguracjach zastosowano identyczny sposób dozowania ładunku, polegający
na iniekcji do obwodu uśredniającego R-C standardowych impulsów prądowych o zadanej
amplitudzie i rozciągłości czasowej. W obu też układach zastosowano taki sam standaryzator długotrwałości impulsu prądowego, wykorzystując w tym celu monowibrator
scalony typu SN 74121N. Różnice dotyczą realizacji sterowanych źródeł prądowych.
W przypadku (A) funkcję tę pełni prosty, sterowany napięciowo stopień OE (T1A),
wspomagany obwodami ustalającymi stan jego odcięcia (dioda D1A i tranzystor T2A).
Wartość prądu tego źródła jest podyktowana przez wartości rezystorów (stałego R7A oraz
nastawczego RxA) w obwodzie emiterowym tranzystorów T1A i T2A. Alternatywne rozwiązanie (B) w charakterze źródła prądowego wykorzystuje stopień wzmacniający w kon-figuracji OB (tranzystor T2B) z regulacją poziomu w obwodzie emiterowym (sterowany dzielnik
T1B R2B, komutujący napięcie wejściowe stopnia T2B, oraz rezystor szeregowy RxB).
W odmienny sposób realizowany jest również pomiar odpowiedzi obu konwerterów.
Wersja (A) dokonuje go w systemie napięciowym przez pomiar napięcia na obwodzie
całkującym Ri-Ci, natomiast w wersji (B) przedmiotem bezpośredniego pomiaru jest prąd
w gałęzi rezystorowej tego obwodu. (w module ćwiczeniowym przewidziano możliwość
53
pomiaru napięcia na zaciskach obwodu całkującego – obwód pomiaru prądu w przypadku
braku zewnętrznego mikroamperomiera należy wówczas zewrzeć na krótko).
Dla zadanych elementami nastawczymi wartości parametrów wejściowych impulsów
prądowych (Ii, ti) relację między wymuszeniem (<f >) a odpowiedzią (<Vo>) wyznacza
równanie bilansu prądów obwodu całkującego (akumulatora z odpływem). Prowadzi ona do
prostej zależności liniowej
Vo Ri I i t i f ,
w której czynnik przed symbolem średniej częstości zliczeń stanowi podstawowy parametr
integratora liniowego zwany współczynnikiem konwersji (przemiany) kp.
+5V
RN
+24V
CN
+6V
34401 A
A)
10
14
13 12
11
10
9
1k
8
L
SN 74121N
1
2
3
4
5
6
7
Ci
10n
Ri
3M3
BFP519
1k2
WE
VM
1k
VM
<Vo >
200
2N2905A
6k98
VM
-24V
-24V
V
M
RxA
100
R3B 820
+24V
BZP630C12
R2B
1k
0.1
R7A
7k5
27p
-24V
B)
T2A
BAY55
BZYP 11
C6V2
30k
500
20k
+24V
+24V
2N3823
BFP519
T1A
D1A
<f>
+24V
H
BSYP07
R4B 100A
100k AM
10n
BSXP93
BFP519
BFP519
BSYP07
RxB
R1B
1k
T2B
T1B
BAYP 95
Ci
100
VM
VM
do –12V
<Vo> <I0>
Rys. 9.1. Schematy integratorów zmontowanych w module INTEGRATORY LINIOWE
I
Kolejny rysunek (rys. 9.2) przedstawia schematy ideowe pary konwerterów drugiej
grupy z iniekcją ładunku do obwodu uśredniającego za pośrednictwem pompy diodowej.
Podstawową wersję (układ C) według oryginalnej koncepcji ElmoraSandsa reprezentuje
tu układ stosowany w torze liniowym INTEGRATORA LINIOWO-LOGARYTMICZNEGO
typu ILL-21 wchodzącego w skład systemu aparatury jądrowej STANDARD-70. W stopniu
standaryzatora impulsów wejściowych wykorzystuje on monowibrator zrealizowany na
54
czterech bramkach logicznych układu scalonego UCY 7400N. Generowane w nim impulsy
po wzmocnieniu w konwencjonalnym stopniu OE przekazywane są do pompy diodowej
(kondensator dozujący Cd, dioda D2C oraz połączony w układzie diody tranzystor T1C)
iniekującej określone porcje ładunku do obwodu całkującego Ri – Ci. Formowana w tym
obwodzie odpowiedź napięciowa konwertera <Vo> jest w ogólności nieliniową funkcją
wymuszenia (tj. średniej częstości zliczeń <f>). Zależność tę opisuje charakterystyka
przenoszenia układu pompy diodowej
Vo Vi
f Ri C d
,
1 f Ri C d
która dla wartości
1
Ri C d
wykazuje akceptowalną w praktyce pomiarowej liniowość.
f
Dla uzyskania pożądanych, dostatecznie dużych wartości napięcia wyjściowego w warunkach ograniczenia zakresu pomiarowego do początkowej zaledwie części charakterystyki przenoszenia niezbędne jest odpowiednie zwiększenie napięcia impulsów wejściowych Vi. W omawianym układzie celowi temu służy właśnie stopień wzmacniający T1C.
Na schemacie pominięto rozbudowany układ elektronicznego woltomierza z odczytem
analogowym oznaczając go jedynie umownym symbolem graficznym.
+6V
C)
D1C
BAYP95
390
+24V
1T
240
14 13 12
11
10
9
8
10/60
BC527
UCY7400N
WE
1
2
3
4
5
6
7
Cd
BC211
100
390
1k2
<Vo>
Ri - Ci
1M
10
D2C
BAYP95
<f>
200
T2C
T1C
VM
34401A
D)
CiD
10
RiD
100k
+15V
Cd
100p
D2D
<Vo>
D1D
BAYP95
A 741
BAYP95
- 15V
10k
1k
34401A
VM
Rys. 9.2. Schematy integratorów zmontowanych w module INTEGRATORY LINIOWE
II
55
Wolną od niedostatków prostego układu z pompą diodową jest konfiguracja zaproponowana przez Cooke’aYarborough i Pulsforda, stanowiąca tandem pompy diodowej i całkującego wzmacniacza operacyjnego. W module ćwiczeniowym wykorzystano jej zmodyfikowaną „replikę” (układ D) wykonaną całkowicie na elementach i podzespołach
współczesnej techiki półprzewodnikopwej. Odpowiedź konwertera (<V o>) na wymuszenie
(<f>) opisana jest w tym przypadku zależnością
Vo Vi
f Ri C d
1 f Ri C d
1
kv
,
która przy odpowiednio wysokim wzmocnieniu napięciowym kv wzmacniacza sprowadza
się z dobrym przybliżeniem do związku liniowego. Współczynnik konwersji integratora
określony jest wówczas iloczynem Vi Ri Cd . Wersja ta korzysta z tego samego normalizatora impulsów, jaki użyto w integratorze ILL-21. Wobec inherentnie szerokiego zakresu
liniowego nie jest tu wymagane dodatkowe wzmacnianie impulsów.
Program ćwiczenia instrukcja szczegółowa
Zadanie 9.1. Pomiary charakterystyk przenoszenia integratorów
W układzie pomiarowym przedstawionym schematycznie na rysunku 9.3 dokonać
pomiaru charakterystyk przenoszenia wskazanych przez prowadzącego ćwiczenia konfiguracji układowych. Rekomendowany jako źródło sygnału wejściowego generator impulsów PGP-6 ustawić w trybie generacji impulsów pojedynczych. Ustalić polarność
impulsów oraz ich amplitudę zgodnie z wymaganiami dodatniej logiki TTL. Każdorazowo
nastawioną częstotliwość generowanych impulsów pomierzyć przy pomocy przelicznika
P-41, dobierając czas zliczania impulsów według kryterium 1% dokładności pomiaru.
KB-60-01
<Io>
PGP-6
<f>
A
DUT
<Vo>
34401A
P-41
Rys. 9.3. Schemat zestawu do pomiaru charakterystyk przenoszenia integratorów
56
Napięcia niezbędne do zasilania modułów ćwiczeniowych ustalić, korzystając z organów nastawczych zasilacza KB-60-01 i kierując się praktyczną wskazówką połączeń dla
obu grup integratorów, podaną na rysunku 9.4. W szczególności dla grupy pierwszej
(INTEGRATORY LINIOWE I.) odnośne połączenia ukazuje rysunek 9.4a. natomiast grupy
drugiej (INTEGRATORY LINIOWE II) – rysunek 9.4b.
a)
b)
+6V
+18V
+6V
+24V
-12V
-24V
-12V
+6V
+9V
+6V
V
+15 V
+9V
+24V
-15V
-15
Rys. 9.4. Układy połączeń zasilacza KB-60-01 do zasilania modułów ćwiczeniowych I i II
Właściwe pomiary poprzedzić pomiarami orientacyjnymi dla zgrubnego wyznaczenia
obszaru górnego zakrzywienia charakterystyki i określenia nominalnej wartości maksimum
odpowiedzi. Wartość tę, określającą zakres pomiarowy, przyjąć wstępnie równą około 90%
poziomu nasycenia.
Określone w ten sposób przedziały częstotliwości pokryć co najmniej dziesięcioma
równomiernie rozłożonymi punktami pomiarowymi. Wyniki pomiarów przedstawić tabelarycznie i wykreślnie w formie charakterystyk < V >(< f >) względnie < Io >(< f >).
UWAGA
W pomiarze napięcia wyjściowego integratora w konfiguracji (A) użyty w tym
celu woltomierz elektroniczny podłączyć w trybie „wiszącym” (zaciski H-L)
Zadanie 9.2. Wyznaczenie współczynników konwersji kp i nieliniowości całkowej i integratorów
Na podstawie uzyskanych rezultatów pomiarowych wyznaczyć:
wartość współczynnika konwersji dla założonego a priori zakresu pomiarowego,
nieliniowość całkową i dla tego zakresu,
wg kryterium zadanej wartości i (np. i = 1%) określić nominalny zakres pomiarowy
oraz przynależną mu wartość współczynnika konwersji.
Globalnym parametrem opisującym nieliniowość układu jest tzw. współczynnik
nieliniowości całkowej i. W domenie odpowiedzi napięciowej układu z mocy definicji
wyraża się on zależnością
def V
o
i
,
Vo max
57
gdzie:
Vo
maksymalne odchylenie charakterystyki przejściowej od idealizowanego
przebiegu liniowego,
Vo max maksymalna wartość nominalna odpowiedzi.
W praktyce metrologicznej upowszechniły się trzy sposoby określania odchyłki Vo
Zilustrowano je na rysunku 9.5.
<Vo>
<Vo>max
VoC
C
VoBC
VoA
B
C
A
<f>
<f>max
Rys. 9.5. Ilustracja ogólnych definicji liniowości przenoszenia układów
Największą popularność zyskał sposób, w którym Vo stanowi naturalną, maksymalną odległość punktów charakterystyki rzeczywistej i idealnej (VoA) leżących na
wspólnej rzędnej, przy czym referencyjną charakterystykę idealną reprezentuje prosta A
przechodząca przez skrajne punkty charakterystyki rzeczywistej. Drugi sposób przyjmuje za
odniesienie prostą B równoległą do A, stanowiącą symetralną punktów charakterystyki
rzeczywistej (VoB). Według tego sposobu wyznaczana jest nieliniowość całkowa urządzeń
systemu aparaturowego STANDARD. Najrzadziej stosowany, trzeci sposób, za reprezentatywną odchyłkę (VoC) przyjmuje odległość między punktem przecięcia stycznej do
charakterystyki rzeczywistej w „zerze” C z poziomem <Vo>max, a leżącym na wspólnej
rzędnej punktem charakterystyki rzeczywistej. Ze względu na niezgodność wartości i
wyznaczanych różnymi sposobami dane katalogowe odnośnych urządzeń zawierają z reguły informację jakim sposobem w danym przypadku się posłużono.
W ramach ćwiczenia należy dokonać wyznaczenia współczynnika nieliniowości
całkowej metodą graficzną według sposobu pierwszego. Prostą odniesienia jest w tym przypadku charakterystyka idealna wykreślona od początku układu współrzędnych do punktu
o współrzędnych < f >max i <Vo>max. Zauważmy, że współrzędne końcowe charakterystyki
idealnej determinują zarazem wartość współczynnika konwersji (przemiany) kp zgodnie
z oczywistą relacją
V
k p o max tg .
f max
W zadaniu tym posłużyć się metodą kolejnych przybliżeń, wyznaczając wartości
współczynnika nieliniowości całkowej przy stopniowo zawężanym zakresie pomiarowym.
58
Zadanie 9.3. Pomiar czasu rozdzielczego integratorów
Pomiar przeprowadzić w układzie podanym na rysunku 9.3. Przełączyć generator
impulsów PGP-6 w tryb generacji impulsów podwójnych (pary impulsów). Nastawić
częstotliwość repetycji impulsów na wartości odpowiadającej środkowi zakresu pomiarowego integratora. Pomiar rozpocząć od minimalnej odległości czasowej pary impulsów,
zwiększając ją stopniowo aż do momentu (skokowego) dwukrotnego wzrostu wskazań integratora. Odpowiadający temu momentowi odstęp czasowy pary impulsów określa wyznaczany czas rozdzielczy integratora.
Zadanie 9.4. Rekalibracja integratora
Dla zadanych parametrów znamionowych (zakres częstości zliczeń, stała czasowa)
obliczyć wartości elementów nastawczych wskazanej przez prowadzącego zajęcia konfiguracji integratora (z grupy drugiej), wmontować je do układu i sprawdzić doświadczalnie
uzyskane rezultaty.
Wyposażenie stanowiska ćwiczeniowego
Moduł ćwiczeniowy: INTEGRATORY LINIOWE I (A-B)
Moduł ćwiczeniowy: INTEGRATORY LINIOWE II (C-D)
Generator impulsów: typ PGP-6
Woltomierz cyfrowy: typ HP 34401 A
Mikroamperomierz laboratoryjny
Zasilacz niskiego napięcia typu KB-60-01
Przelicznik impulsów serii STANDARD 70: typ P-44
Podzespoły elektroniczne
Kable i przewody łączące
Literatura pomocnicza
[1] Instrukcja obsługi: Integrator linearno-logarytmiczny typ ILL-41. Warszawa, ZZUJ
POLON 1973
[2] Instrukcja obsługi: Integrator liniowo-logarytmiczny - typ ILL-21a. Zielona Góra,
ZZUJ POLON 1979
[3] Instrukcja obsługi: Integrator liniowy – typ 1301A. Warszawa, ZZUJ POLON 1976
[4] Instrukcje obsługi pomocniczej aparatury pomiarowej
[5] Korbel K.: Elektronika jądrowa. Cz.III. Układy i systemy elektroniki jądrowej. Kraków, Wyd. AGH 1987
59
ĆWICZENIE LABORATORYJNE 10
Integrator logarytmiczny A
Zakres ćwiczenia
Badanie własności integratorów o skali logarytmicznej z formowaniem charakterystyki przenoszenia za pomocą diody (złącza) półprzewodnikowej w obwodzie wejściowym oraz w pętli sprzężenia zwrotnego wzmacniacza operacyjnego.
Pomiar charakterystyki przejściowej [<Vo> fi ].
Pomiar dyspersji odpowiedzi w funkcji częstotliwości.
Pomiar szybkości reakcji integratora na skokową zmianę częstotliwości .
Przedmiot ćwiczenia
Przedmiotem ćwiczenia są dwie wersje układowe integratora logarytmicznego:
1) wersja z diodowym dwójnikiem wejściowym (konfiguracja Goodyeara),
2) wersja z diodą formującą w gałęzi ujemnego sprzężenia zwrotnego wzmacniacza operacyjnego.
Na rysunku 10.1 przedstawiono schemat ideowy pierwszej konfiguracji. Stanowi ona
emulację półprzewodnikową układu lampowego Goodyeara. Elementem kształtującym
charakterystykę konwersji integratora jest dioda półprzewodnikowa pracująca w reżymie
przewodzenia. Płynący przez nią prąd pozyskiwany z układu dozującego z pompą diodową
daje na niej spadek napięcia proporcjonalny do logarytmu średniej wartości częstotliwości
impulsów wejściowych. Uzyskanie „dobrej logarytmiki” przetwarzania uwarunkowane jest
ograniczeniami wnoszonymi przez układ pompy diodowej oraz wpływ rezystancji bocznikujących diodę logarytmującą.
CF
WE
Cd
D
R
R
_F
+
1
Vi
<f>
D2
C
DLOG
WY
<Vo>
R
Rys. 10.1. Schemat integratora logarytmicznego w konfiguracji Goodyeara
Alternatywnym sposobem wykorzystania dwójnika kształtującego do formowania charakterystyki logarytmicznej analogowego integratora impulsów jest włączenie go w pętlę
60
ujemnego sprzężenia zwrotnego wzmacniacza operacyjnego. Pod względem funkcjonalnym tego rodzaju konfiguracja stanowi tandem złożony z pompy diodowej oraz prądowo-napięciowego konwertera logarytmującego. Rysunek 10.2 podaje jej schemat ideowy.
CF
WE
Vi
<f>
D1
Cd
D2
DLOG
_
+
C
R
WY
<Vo>
Rys. 10.2. Schemat integratora logarytmicznego z aktywnym formowaniem charakterystyki
Program ćwiczenia instrukcja szczegółowa
Pomiary w zakresie dwóch pierwszych zadań przeprowadzić równolegle w układzie
pomiarowym przedstawionym schematycznie na rysunku 10.3.
VMRMS
TDS 220
VMDIGIT
HP33120A
VMANAL
DUT
Rys. 10.3. Schemat układu do pomiaru własności integratorów logarytmicznych
Wspólne dla obu zadań źródło sygnału stanowi generator sygnałów okresowych HP
33120A przełączony w tryb generacji fali prostokątnej. Jej amplitudę ustalić na poziomie
Vi = 5,0 V i kontrolować stale w trakcie pomiarów przy
pomocy oscyloskopu
pomiarowego TDS 220.
Cykl pomiarowy obejmuje liczny zespół pomiarów punktowych dla założonych, pokrywających obszar kilku dekad, częstotliwości sygnału wejściowego. Wartości częstotliwości w obrębie każdej dekady przyjąć według postępu 1-2-3-4-5-6-7-8-9.
61
Zadanie 10.1. Pomiar charakterystyki przejściowej integratorów [<Vo> fi ]
Dla podanych w programie ćwiczenia parametrów sygnału wejściowego dokonać pomiaru odpowiedzi integratorów (oznaczanych na schemacie symbolem DUT) za pomocą
woltomierzy stałoprądowych: cyfrowego (DIGIT) i wychyłowego (ANALOG). Można również w tym celu wykorzystać drugi kanał pomiarowy oscyloskopu.
Wyniki pomiarów zestawić w tabelce oraz sporządzić wykres zależności <Vo>
w funkcji logarytmu częstotliwości impulsów wejściowych fi.
W przedziale „dobrej logarytmiki” wyznaczyć metodą regresji liniowej funkcję wiążącą
te dwie wielkości.
Zadanie 10.2. Pomiar dyspersji odpowiedzi integratorów
Do pomiaru tej wielkości przewidziano w ćwiczeniu dwie możliwości:
1) pomiar za pomocą woltomierza wartości średniej kwadratowej ( VMrms),
2) pomiar metodą oscyloskopową składowej fluktuacyjnej odpowiedzi.
Korzystając z wyników pierwszego zadania obliczyć wartości względnego błędu
pomiaru odpowiedzi. Rezultaty pomiarów i obliczeń przestawić w ujęciu tabelarycznym
i wykreślnie.
Zadanie 10.3. Pomiar szybkości reakcji na skokową zmianę częstotliwości
Za miarę szybkości reakcji integratora przyjmiemy czas po upływie którego, poczynając od momentu zadziałania wymuszenia skokowego, poziom odpowiedzi osiągnie 90%
swej wartości ustalonej. Pomiar ten sprowadza się do rejestracji przebiegu procesu
przejściowego i odczytu wartości współrzędnej czasowej t90 . Na rysunku 10.4 podano
schemat układu pomiarowego wykorzystującego w charakterze rejestratora procesu nieustalonego oscyloskop cyfrowy ( TDS 220) pracującego w trybie zewnętrznego wyzwalania podstawy czasu (START-STOP).
HP 3004
TDS 220
VMRMS
START - STOP
HP 33120A
DUT
Rys. 10.4. Schemat zestawu do pomiaru szybkości reakcji integratora
Skokową zmianę częstotliwości impulsów wejściowych (od początkowej wartości
zerowej do aktualnie zadanej) uzyskujemy poprzez kolejno następujące odłączanie i przyłączanie do badanego integratora ciągu impulsów generatora PGP-6. Ponownego w tej
sekwencji przyłączenia należy dokonać w „zerowym” stanie ustalonym bezpośrednio po
62
uruchomieniu – sygnałem START biegu podstawy czasu oscyloskopu. Sygnał STOP
„zamraża” na ekranie zarejestrowany do tego momentu przebieg.
Pomiary należy przeprowadzić dla częstotliwości 10 Hz, 100 Hz, 1 kHz i 10 kHz.
Wyniki pomiarów przedstawić w tabelce oraz w formie wykreślnej zależności t90 od częstotliwości fi.
Wyposażenie stanowiska ćwiczeniowego
Moduł ćwiczeniowy: INTEGRATOR LOGARYTMICZNY A
Generator sygnałów okresowo zmiennych: typ HP 33120A
Woltomierz cyfrowy: typ HP 34401 A
WIELOZAKRESOWY WOLTOMIERZ ANALOGOWY
Woltomierz wartości średniej kwadratowej: typ HP 3004 A
Oscyloskop cyfrowy typ: TDS 220
Zasilacz niskiego napięcia: typ KB-60-01
Kable i przewody
Literatura pomocnicza
[1] Instrukcja obsługi: Integrator liniowo-logarytmiczny typ ILL-21. Zielona Góra, ZZUJ
POLON 1979
[2] Instrukcje obsługi pomocniczej aparatury pomiarowej
[3] Korbel K.: Elektronika jądrowa. Cz. III. Układy i systemy elektroniki jądrowej. Kraków, Wyd. AGH 1987
[4] Sanin A.A.: Elektroniczne przyrządy fizyki jądrowej. Warszawa, WNT 1967
63
ĆWICZENIE LABORATORYJNE 11
Integrator logarytmiczny B
Zakres ćwiczenia
Badania własności integratora logarytmicznego w układzie Cooke’aYarborough.
Pomiar charakterystyki konwersji <f> <Vo>.
Pomiar dyspersji odpowiedzi integratora.
Pomiar szybkości reakcji integratora na skok częstotliwości impulsów wejściowych.
Wyznaczenie charakterystyki globalnej na podstawie pomiarów charakterystyk subukładów.
Przedmiot ćwiczenia
Stanowiący przedmiot ćwiczenia moduł laboratoryjny jest repliką sekcji logarytmicznej integratora impulsów typu ILL-41 wchodzącego w skład systemu aparatury jądrowej
STANDARD. Schemat ideowy badanego układu integratora przedstawiono na rysunku 11.1.
WE
1M
0.1
1
0.1
10k
1M
1k
2k7
1
10n
1
47k
100k
315k
1M
1M
_
0.5
1n
200
WY
10k
1
080
+
10k
1M
10k
200
0.1
10k
1M
100
0.3
20n
1M
15
10n
Rys. 11.1. Schemat integratora logarytmicznego w układzie Cooke’aYarborough
Układ zawiera 6 strukturalnie identycznych subukładów wykonanych w formie
konwerterów częstotliwość-napięcie z pompami diodowymi, załączonych na wejście
wzmacniacza operacyjnego w trybie sumowania odpowiedzi cząstkowych. Celowo zróżni-
64
cowane wartości pojemności dozujących umożliwiają osiągnięcie „dobrej logarytmiki”
w obrębie 5 dekad częstotliwości (102 106 imp/min). Moduł ćwiczeniowy oprócz zasadniczego, wielotorowego układu integratora zawiera dodatkową, osobną komórkę z wymienialnymi kondensatorami dozującymi.
Program ćwiczenia instrukcja szczegółowa
Do pomiaru charakterystyk przenoszenia (konwersji sygnału) indywidualnych komórek integratora oraz jego pełnej konfiguracji zestawić układ pomiarowy podany
schematycznie na rysunku 11.2. Źródłem ciągu impulsów o nastawialnej częstotliwości
jest generator impulsów typu PGP-6. Nastawić wartość napięcia impulsów generatora na
poziomie Vi = 10 V, kontrolując ją bieżąco w trakcie pomiarów za pomocą oscyloskopu
TDS 220. Dobrać odpowiednio rozciągłość czasową impulsów wejściowych.
Konwencjonalne układy integratorów impulsów (w tym również, będący wzorem
modułu ćwiczeniowego, integrator typu ILL-41) wyposażone są z reguły w analogowe
(wychyłowe) mierniki poziomu odpowiedzi. W zestawie ćwiczeniowym obok tego sposobu indykacji odpowiedzi (miliwoltomierz VMANAL) przewidziano nadto pomiar za pomocą woltomierza cyfrowego (VMDIG) oraz oscyloskopu pomiarowego.
VMRMS
TDS 220
VMDIGIT
HP33120A
VMANAL
DUT
Rys. 11.2. Schemat zestawu do pomiaru charakterystyk przenoszenia integratora
Zadanie 11.1. Pomiar charakterystyki konwersji indywidualnych komórek
integratora
Przedmiotem pomiaru (DUT) jest w tym przypadku wyodrębniona na module ćwiczeniowym podstawowa komórka integratora z pompą diodową. Dokonać pomiaru charakterystyki konwersji sygnału komórki dla różnych wartości pojemności kondensatora
dozującego, dołączanego na zewnątrz modułu do gniazd oznaczonych na płycie czołowej
modułu symbolem „Cx”. Wartości tych pojemności przyjąć równe odpowiednim wartościom podanym na schemacie globalnym. Wykreślić przebiegi pomierzonych charakterystyk
w układzie współrzędnych Vof oraz Volog (f). Wyznaczyć wartości częstotliwości
impulsów wejściowych, przy których poziomy odpowiedzi są równe połowie swych wartości maksymalnych.
65
Zadanie 11.2. Pomiar charakterystyki konwersji pełnej konfiguracji
integratora impulsów
Na podstawie znajomości wartości elementów układowych oszacować maksymalną
wartość odpowiedzi integratora przy założonych parametrach sygnału wejściowego
(Vi = 10 V i f = fmax). Dokonać pomiaru charakterystyki konwersji sygnału w zakresie
częstotliwości od 10 Hz do 100 kHz. Wyniki pomiarów przedstawić w formie graficznej
w układzie współrzędnych <Vo> log <f>.
Zadanie 11.3. Pomiar dyspersji odpowiedzi integratora
Pomiary przeprowadzić również w układzie z rysunku 11.2, wykorzystując gałęzie
pomiarowe oznaczone liniami przerywanymi (oscyloskop TDS 220 i woltomierz wartości
średniej kwadratowej VMRMS). Należy je wykonać na poziomach odpowiedzi (< Vo>)
odpowiadających częstotliwościom impulsów wejściowych wyznaczających granice dekad
zakresu pomiarowego. Wyniki pomiarów zestawić w tabelce.
Zadanie 11.4. Pomiar szybkości reakcji na skokową zmianę częstotliwości
Miarą szybkości reakcji na skokową zmianę częstotliwości jest interwał czasu, po
upływie którego, licząc od momentu zadziałania wymuszenia skokowego, poziom odpowiedzi osiągnie 90% swej wartości ustalonej. Pomiar sprowadza się do rejestracji przebiegu procesu przejściowego i odczytu wartości współrzędnej czasowej t90. W tym celu należy zestawić układ pomiarowy według schematu podanego na rysunku 11.3.
VMRMS
TDS 220
HP 3004
START - STOP
PGP-6
DUT
Rys. 11.3. Schemat układu do pomiaru szybkości reakcji integratora
W charakterze rejestratora procesu nieustalonego użyć oscyloskop cyfrowy TDS 220
pracujący w trybie zewnętrznego wyzwalania podstawy czasu (opcja START-STOP).
Skokową zmianę częstotliwości impulsów wejściowych (od początkowej wartości zerowej
do aktualnie zadanej) uzyskujemy poprzez kolejno następujące odłączanie i przyłączanie do
badanego integratora ciągu impulsów generatora PGP-6. Ponownego w tej sekwencji przyłączenia należy dokonać w „zerowym” stanie ustalonym bezpośrednio po uruchomieniu –
sygnałem START biegu podstawy czasu oscyloskopu. Sygnał STOP „zamraża” na
ekranie zarejestrowany do tego momentu przebieg.
66
Pomiary należy przeprowadzić dla częstotliwości wyznaczających granice dekad zakresu pomiarowego integratora. Wyniki pomiarów zestawić w tabelce oraz przedstawić
w formie wykresu zależności czasu t90 od częstotliwości f.
Zadanie 11.5. Konstrukcja charakterystyki globalnej na podstawie
charakterystyk subukładów
Przedstawić na wspólnym wykresie zespół charakterystyk wyznaczonych w zakresie
zadania 11.1 oraz sumacyjną charakterystykę wypadkową. Porównać uzyskaną na tej
drodze charakterystykę globalną integratora z charakterystyką wyznaczoną w zadaniu 11.2.
Metodą regresji liniowej wyznaczyć parametry charakterystyki idealnej oraz określić
zakres „dobrej logarytmiki” integratora.
Wyposażenie stanowiska ćwiczeniowego
Moduł ćwiczeniowy: INTEGRATOR LOGARYTMICZNY - B
Generator impulsów: typ PGP-6
MILIWOLTOMIERZ
Woltomierz cyfrowy typ HP 34401 A
Woltomierz wartości średniej kwadratowej: typ HP 3004 A
Oscyloskop cyfrowy: typ TDS 220
Zasilacz niskiego napięcia: typ KB-60-01
Kable, przewody i komplet kondensatorów (CWYM)
Literatura pomocnicza
[1]
Instrukcja obsługi: Integrator linearno-logarytmiczny ILL-41. Warszawa, ZZUJ POLON 1973
[2] Korbel K.: Elektronika jądrowa. Cz. III. Układy i systemy elektroniki jądrowej. Kraków, Wyd. AGH 1987
[3] Sanin A.A.: Elektroniczne przyrządy fizyki jądrowej. Warszawa, WNT 1964
67
ĆWICZENIE LABORATORYJNE 12
Układy odbioru informacji czasowej
Zakres ćwiczenia
Badanie efektu wędrowania (ang. walk effect) i efektu drżenia (ang. jitter) w pomiarach techniką dyskryminacji na czole LED (ang. Leading Edge Discrimination)
Badanie efektu wędrowania i nieoznaczoności ekstrakcji informacji o czasie zdarzenia w pomiarach technikami dyskryminacji stałofrakcyjnej:
wierno-stałofrakcyjnej TCF (ang. True Constant Fraction)
dyskryminacji z kompensacją amplitudy i czasu narastania ARC (ang. Amplitude and Risetime Compensation).
Przedmiot ćwiczenia
Przedmiotem ćwiczenia są dwa rodzaje dyskryminatorów napięcia:
dyskryminator progowy,
dyskryminator stałofrakcyjny.
Pierwszy z wymienionych stanowi wkładkę (DP-21) systemu elektronicznej aparatury
jądrowej STANDARD drugi natomiast MODUŁ ĆWICZENIOWY wykonany również
w formie wkładki tego systemu.
Na rysunku 12.1 przedstawiono schematycznie podstawową część układu dyskryminatora progowego DP-21, zawierającą wtórnik sygnału wejściowego (WTWE) , wtórnik
napięcia progowego (WTPR) oraz komparator (KOMP) z histerezą, jak również regulowane
źródło napięcia progowego VPR.
WTWE BF519
RF = 75k
WE
SN 72710
WY
WTPR BF519
KOMPARATOR
=
do układu
formowania
VPR
Rys. 12.1. Uproszczony schemat dyskryminatora progowego
Rysunek 12.2 przedstawia z kolei schemat ideowy dyskryminatora stałofrakcyjnego.
Linia opóźniająca z odczepami DL o maksymalnym opóźnieniu transmisyjnym tD = 2s
umożliwia przełączenie układu w tryb pracy dyskryminatora wierno-stałofrakcyjnego
68
(TCF) względnie dyskryminatora stałofrakcyjnego z kompensacją amplitudy i czasu
narastania (ARC).
WE
WY
( )
DL
12k 100
100k
10
P-1 0
DL
10x200ns
1200Ω
10
k
1k
10
k
1k2
500
L1
15
SN 72710
7271
0
20
0
200
1,5
74121
69k
1k2
KONTR.
Rys. 12.2. Schemat ideowy dyskryminatora stałofrakcyjnego w module ćwiczeniowym
Obwód wejściowy dyskryminatora tworzą dwie gałęzie: dzielnik rezystorowy ( P-1),
oraz dopasowana linia opóźniająca (DL) z odczepami. Za ich pośrednictwem przekazywany jest sygnał na wejścia układu odejmującego (subtraktora). Uformowany w nim sygnał różnicowy kierowany jest z kolei do detektora przejścia przez zero, zrealizowanego
w układzie konwencjonalnym na komparatorze SN 72710. Zmiana stanu na wyjściu tego
komparatora pobudza monowibrator wyjściowy SN 74121, generujący impuls informacji
czasowej.
Trzy gniazda wyjściowe [DL, (), WY] pozwalają obserwować i mierzyć sygnał
w wybranych punktach układu, stosownie do zaleceń szczegółowego programu ćwiczenia.
Dla celów serwisowych, na płytce montażowej układu dostępny jest dodatkowy punkt
pomiarowy oznaczony na schemacie symbolem (KONTR).
Program ćwiczenia instrukcja szczegółowa
Zadania pomiarowe ćwiczenia dotyczą dwóch zagadnień:
1) wpływu czasu narastania impulsu wejściowego oraz jego amplitudy na opóźnienie
czoła, generowanego w odpowiedzi, standardowego impulsu wyjściowego (ang. walk
effect);
2) wpływu zakłóceń fluktuacyjnych (szumów) na nieoznaczoność tego opóźnienia (ang.
jitter).
Zadanie 12.1. Badanie efektu wędrowania w dyskryminatorze progowym
Zestawić układ pomiarowy według schematu podanego na rysunku 12.3. Symbolem
DUT oznaczono na nim badaną wkładkę dyskryminatora progowego DP-21. Należy ją
wstawić do (nieuwidocznionej na schemacie) „obudowy” systemu STANDARD, zawie-
rającej autonomiczny, stabilizowany zasilacz niskiego napięcia.
69
GL-3 (RP-1)
TAS 465
DUT
Rys. 12.3. Schemat układu do pomiaru efektu wędrowania
Wykonać serie pomiarów przesunięcia t odpowiedzi dyskryminatora na wymuszenie
impulsem wejściowym o różnych wartościach czasu narastania tn (0,5 s, 1,0 s, 2,0 s
i 5,0 s) oraz amplitudy Vm (2 V; 3 V; 4 V i 5 V), dla założonej wartości progu
dyskryminacji VPR = 1 V. Wyniki pomiarów przedstawić tabelarycznie, a na ich podstawie
wykreślić przebieg zależności t = f(tn) przy Vm .= const oraz t = f(Vm) przy tn = const dla
dowolnie wybranego zespołu danych pomiarowych.
Zadanie 12.2. Badanie efektu „drżenia” w dyskryminatorze progowym
Uzupełnić poprzedni zestaw pomiarowy miernikiem wartości średniej kwadratowej
napięcia (VMrms) oraz modułem ćwiczeniowym generatora szumów (GENSZ) według
schematu podanego na rysunku 12.4.
VMRMS
TAS 465
GENSZ
GL-3
DUT
Rys. 12.4. Schemat zestawu do obserwacji i pomiaru efektu drżenia
Dokonać obserwacji odpowiedzi dyskryminatora dla impulsu wejściowego o amplitudzie VM = 2,0 V i czasie narastania tn = 5s dla progu dyskryminacji Vpr = 1 V, przy różnym poziomie szumu VN rms. Przerysować obserwowane przebiegi i ocenić nieoznaczoności pomiarów „czasu aparaturowego”. (Badany efekt występuje wyraźniej w przypadku
użycia generatora fali trójkątnej, np. typ POF-10 lub HP 33120 A).
70
Zadanie 12.3. Badanie własności dyskryminatora wierno-stałofrakcyjnego
TCF
Badania przeprowadzić w układzie pomiarowym z rysunku 12.4. Dla założonej
wartości czasu narastania impulsu wejściowego tn (np. 1,5 s) dobrać wartość opóźnienia
sygnału tD w gałęzi odejmującej subtraktora, zapewniającej wierno-stałofrakcyjny tryb
pracy dyskryminatora. Za pomocą potencjometru P-1 nastawić założony (optymalny) stopień attenuacji sygnału (f) wejściowego w drugiej gałęzi wejściowej subtraktora.
Dokonać obserwacji sygnału w wyróżnionych punktach węzłowych dyskryminatora
i wykonać według programu poprzedniego zadania ćwiczeniowego pomiary następujących
parametrów znamionowych:
czasu aparaturowego,
nieoznaczoności czasu aparaturowego.
Rezultaty pomiaru przesunięcia czasowego odpowiedzi dyskryminatora zestawić w tabelce. Sformułować wnioski wynikające z tych pomiarów. Wyniki bezpośrednich pomiarów efektu drżenia skonfrontować z wartościami teoretycznie oczekiwanymi.
Zadanie 12.4. Badanie własności dyskryminatora stałofrakcyjnego typu
ARC
Skorygować układ do postaci odpowiadającej warunkom dyskryminacji z kompensacją czasu narastania i amplitudy (ARC). Przeprowadzić zespół obserwacji i pomiarów, analogiczny jak w przypadku dyskryminatora (TCF). Wyniki badań przedstawić
jak w zadaniu 12.3.
Wyposażenie stanowiska ćwiczeniowego
Wkładka dyskryminatora progowego typu DP-21
Moduł ćwiczeniowy DYSKRYMINATOR STAŁOFRAKCYJNY (wkładka STANDARD)
Generatory impulsów typu GL-3 (RP-1) oraz „fali trójkątnej” POF-10 (HP 33120A)
Oscyloskopy pomiarowe: analogowy TAS 465 oraz cyfrowy TDS 220
Woltomierz wartości średniej kwadratowej typu HP 304 A
Moduł ćwiczeniowy: GENERATOR SZUMU BIAŁEGO (wkładka STANDARD)
Obudowa z zasilaczem systemu STANDARD
Kable i przewody
Literatura pomocnicza
[1]
[2]
Instrukcja obsługi: Dyskryminator progowy typ DP-21. ZZUJ POLON, Warszawa
Instrukcje obsługi pomocniczej aparatury pomiarowej
[3] Korbel K.. Elektronika jądrowa. Cz. II. Układy elektroniki jądrowej. Kraków, Wyd.
AGH 1985
[4] Nicholson P.W.: Nuclear Electronics. London, New York, Sydney, Toronto, John
Wiley & Sons 1974
[5] Techniques for Improved Time Spectrometry. ORTEC Application Note AN-41
71
ĆWICZENIE LABORATORYJNE 13
Szeregowo-równoległa bramka liniowa
Zakres ćwiczenia
Pomiar parametrów znamionowych bramki:
współczynnika przenoszenia bramki Kon,
czasu narastania i opadania tn i to,
poziomu przesłuchu VSFT,
piedestału VPED.
Zestawienie prostego systemu pomiarowego z bramkowaniem sygnału.
Przedmiot ćwiczenia
Przedmiotem ćwiczenia jest układ szeregowo-równoległej, liniowej bramki transmisyjnej w konfiguracji zaproponowanej przez F.S. Gouldinga. Rysunek 13.1 przedstawia
jej pełny schemat ideowy.
5k1
5k1
BC177
+15V
5k1
10k
BC177
15k
12k
WE
BC108
T6
BC108
T7
10k
T9
WY
BC177
T1
I7
I6
100
T8
5k
D1
620
BC108
T2
D2
15k
GATE
BC108
3k
BC108
T4
T3
51
100n PIEDEST
BC108
10k
T5
10k
5k1
I5
4k3
5k1
10k
-15V
Rys. 13.1. Schemat ideowy bramki szeregowo-równoległej wg Gouldinga
Bramka ta należy do kategorii bramek monopolarnych, przeznaczonych do transmisji
impulsów (sygnałów) polarności dodatniej. Podstawowymi jej elementami funkcjonalnymi
są dwa klucze tranzystorowe: szeregowy T1 oraz równoległy T2. Są one przełączane
72
komplementarną parą sygnałów formowaną w stopniu różnicowym T3,T4,T5 w odpowiedzi na zewnętrzny sygnał bramkujący. Sygnał ten podawany jest na bazę tranzystora T3 za
pośrednictwem sieci rezystorowej, umożliwiającej uzgodnienie potencjałów sprzęganych
galwanicznie obwodów źródła sygnału bramkującego i stopnia różnicowego. Tranzystory
T6, T7 i T5 pełnią funkcje źródeł prądowych, przy czym ich wydajności prądowe I6 , I7 oraz
I5 pozostają w relacji: I6 = I7 < I5. Dzięki temu nadwyżka prądu w gałęzi przewodzącej
(T3,T6 lub T4,T7), spływając przez przynależną diodę (D1 lub D2), daje na niej spadek
napięcia utrzymujący w stanie odcięcia odpowiednio tranzystor T1 (klucza szeregowego)
lub, w przypadku alternatywnym, tranzystor T2 (klucza równoległego). Oczywiście,
stanowi odcięcia jednego z kluczy tranzystorowych towarzyszy stan nasycenia drugiego
klucza, uwarunkowany skierowaniem do jego bazy pełnego prądu przynależnego źródła
prądowego.
W stanie spoczynkowym, tj. przy braku sygnału bramkującego, bramka – według założenia projektowego – pozostaje zamknięta. Klucz szeregowy jest wówczas rozwarty
(odcięty), zaś klucz równoległy zwarty. Taki stan zapewnia odpowiednie ustalenie
spoczynkowych wartości potencjałów baz tranzystorów T3 i T4 wymuszające przewodzenie
tranzystora T3. Otwarcie bramki następuje pod działaniem ujemnego sygnału bramkującego
(VB = - 3V) zmieniającego stan przewodzenia tranzystorów stopnia różnicowego i powodującego w dalszej konsekwencji odcięcie tranzystora T2 klucza równoległego i wprowadzenie w nasycenie tranzystora T1 klucza szeregowego.
W tor sygnału włączono nadto separatory wtórnikowe, wejściowy (T8) i wyjściowy
(T9), zapewniające właściwe dopasowanie układu do źródła sygnału i jego odbiornika.
Dodatkowa gałąź (PEDEST) w obwodzie emitera tranzystora T2 umożliwia wprowadzenie
napięcia kompensującego efekt piedestału.
Program ćwiczenia – instrukcja szczegółowa
Zadanie 13.1. Określenie zakresu dynamicznego bramki
i pomiar jej współczynnika przenoszenia
Dokonać wyznaczenia wartości współczynnika przenoszenia bramki KON uśrednionego na całym liniowym obszarze charakterystyki przejściowej. W tym celu zestawić układ
pomiarowy według schematu podanego na rysunku 13.2. Ustalić warunki pracy bramki
w trybie trwałego przewodzenia łącząc jej wejście (GATE) ze źródłem napięcia stałego
VG = 3,0 V.
Generator impulsów PGP-6, wykorzystywany w ćwiczeniu jako źródło sygnału
przełączyć w tryb generacji ciągu impulsów pojedynczych. Za pomocą organów regulacyjnych ustawić następujące wartości parametrów sygnału:
szerokość impulsów
timp = 1 s,
częstotliwość impulsów f = 1 kHz,
polarność impulsów dodatnia (odbiór z odpowiedniego gniazda wyjściowego).
73
Pomiar przeprowadzić standardową techniką „punkt po punkcie”, mierząc każdorazowo amplitudę sygnału (impulsów) wejściowego Vi i wyjściowego Vo bramki, oraz wyznaczając na bieżąco przebieg charakterystyki przenoszenia aż do zaobserwowania
znaczącego odstępstwa od liniowości. Metodą regresji liniowej wyznaczyć idealizowany
przebieg charakterystyki przenoszenia oraz określić nominalny zakres napięć wejściowych
według kryterium dopuszczalnej nieliniowości całkowej na poziomie 1%. Wyznaczyć dla
tego obszaru wartość współczynnika KON.
TDS 220
KB-60-01
-3V +15V -15V
PGP-6
GATE
VG
DUT
WY
WE
Rys. 13.2. Schemat zestawu do pomiaru zakresu dynamicznego oraz współczynnika
przenoszenia bramki liniowej
Zadanie 13.2. Pomiar czasu narastania bramki
Czas narastania bramki r określany jest definicyjnie tak samo, jak czas narastania
wzmacniacza. Zgodnie z definicją jest to zatem czas narastania odpowiedzi bramki na
wymuszenie skokowe. W praktyce pomiarowej zamiast sygnału skokowego posłużyć się
można sygnałem prostokątnym [typu (t)] dostatecznej szerokości i stromości zboczy.
Pozwala on nadto wyznaczyć szybkość zaniku odpowiedzi, poprzez pomiar czasu opadania d.
Pomiar obu tych parametrów należy przeprowadzić w tym samym co poprzednio,
układzie, stosując jako wymuszenie ciąg impulsów prostokątnych o częstotliwości
f = 10 kHz, o szerokości ti = 1s i maksymalnej amplitudzie znamionowej Vi max = + 4,0 V.
Korzystając z możliwości pomiarowych oscyloskopu cyfrowego ( TDS-220) dokonać
pomiaru czasów narastania i opadania zarówno impulsów wejściowych jak i wyjściowych
i na gruncie tych danych wyznaczyć wartości parametrów r i d.
Zadanie 13.3. Pomiar napięcia przesłuchu bramki
Zmodyfikować układ pomiarowy z rysunku 13.2, odłączając wejście sygnału bramkującego od źródła napięcia stałego (3,0V) i zwierając go na krótko do masy. W ten
sposób bramka zostaje wprowadzona trwale w stan odcięcia.
74
Podać na wejście sygnału informacyjnego ciąg impulsów prostokątnych o maksymalnie dopuszczalnej amplitudzie. Zaobserwować na oscyloskopie przebieg wyjściowy
i ewentualnie pomierzyć jego amplitudę (VFST).
Stosunek VFST do Vi max wyznacza zarazem wartość współczynnika przenoszenia
bramki w stanie jej odcięcia tj. KOFF.
Zadanie 13.4. Pomiar i kompensacja piedestału
Efekt piedestału uwarunkowany jest niezgodnością potencjałów na wyjściu bramki
w stanie pasywnym (odcięcia) i aktywnym (przewodzenia). Eksperymentalnie łatwo wyznaczyć jego wielkość obserwując i mierząc zmiany poziomu na wyjściu bramki przy okresowym przełączaniu jej stanu przewodzenia sygnałem bramkującym w warunkach zwartego wejścia sygnału informacyjnego (WE). Dla realizacji tego zadania ćwiczeniowego
przełączyć układ pomiarowy do postaci podanej schematycznie na rysunku 13.3.
KB-60-01
TDS 220
REG
01 V
+15V -15V
PGP-6
GATE
VG
DUT
WE
WY
Rys. 13.3. Schemat układu do pomiaru piedestału bramki liniowej
Generator impulsów PGP-6 przełączyć w tryb generacji unipolarnej fali prostokątnej
(ti = T/2) o amplitudzie nominalnej VG = 3,0 V i polarności ujemnej. Oscylograficzny
pomiar wysokości piedestału VPED przeprowadzić w warunkach otwartego wejścia (PED).
W przypadku stwierdzenia nadmiernego piedestału (powyżej 100 mV) dokonać próby jego
skompensowania napięciem (w przedziale < 01 V>) pobieranym z zasilacza ogólnego
(w sposób podany na schemacie).
Zadanie 13.5. Obserwacja efektu przenikania sygnału bramkującego
Duża stromość krawędzi impulsów bramkujących sprawia, że poprzez pasożytnicze
sprzężenia pojemnościowe te szybkie zmiany sygnału mogą przenikać na wyjście bramki
manifestując się w formie ostrych szpilek (ang. spikes) w momentach przełączania bramki.
Zaobserwować ewentualne występowanie tego efektu w trakcie pomiarów napięcia
piedestału. Przedstawić zwięźle wyniki dokonanych obserwacji.
75
Zadanie 13.6. Realizacja prostego systemu z bramkowaniem sygnału
Liniowe bramki transmisyjne są szeroko stosowane w różnych systemach selekcji
czasowej sygnału. Dobrymi przykładami ich wykorzystania w obszarze fizyki i techniki
jądrowej są spektrometryczne systemy pomiarowe z bezpośrednim uzależnieniem czasowym oraz z uzależnieniami koincydencyjnymi. Proponowana realizacja symuluje własności pierwszej grupy. Jej zadaniem jest wyodrębnienie fragmentu sygnału odległego od
chwili jego wzbudzenia w źródle o znany interwał czasowy.
Rysunek 13.4 przedstawia schemat blokowy takiego systemu pomiarowego, w którym
generator impulsów RP-1 symuluje przebieg sygnału generowanego w źródle.
KB-60-01
+15V -15V
PGP-6
TRIN
TDS 220
GATE
WY
DUT
RP-1
WE
TROUT
t
Rys. 13.4 Schemat prostego systemu transmisji sygnału z bramkowaniem
Załóżmy, że nośnikiem pożądanej informacji jest końcowy fragment tego przebiegu
opóźniony o t względem czoła sygnału (zawarty w zacienionym polu ikonki w bloku
RP-1) i tylko on powinien być przeniesiony przez bramkę. Konieczne jest zatem blokowanie toru transmisyjnego w okresie poprzedzającym wybraną część sygnału i następującym po jej zakończeniu. Funkcję tę spełnia, wyzwalana czołem sygnału źródła, bramka liniowa otwierana z opóźnieniem t na czas trwania wydzielonej frakcji sygnału. Pożądane
opóźnienie oraz długość interwału otwarcia bramki zrealizowano w układzie generacji sygnału bramkowania, wykorzystującym możliwości funkcjonalne generatora impulsów
PGP-6. Dla osiągnięcia postawionych wymagań rekomenduje się następujące ustawienia
generatorów RP-1 i PGP-6:
Generator RP-1
76
amplituda impulsów
czas narastania
czas opadania
częstotliwość
polarność
4,0 V,
0,1 s,
1,0 s,
10 kHz,
dodatnia;
Generator PGP-1
amplituda
3,0 V,
opóźnienie
1,5 s,
szerokość
10 s,
polarność
ujemna,
typ ciągu
impulsy pojedyncze,
tryb pracy – wyzwalanie zewnętrzne impulsami TROUT generatora RP-1.
Zadanie ma charakter jakościowy i polega na obserwacji przebiegów: pierwotnego,
generowanego w źródle (RP-1) i wtórnego uzyskiwanego na wyjściu bramki. Skomentować
wyniki tych obserwacji.
Wyposażenie stanowiska ćwiczeniowego
Moduł ćwiczeniowy: BRAMKA LINIOWA GOULDINGA
Zasilacz niskiego napięcia typu KB-60-01
Generator impulsów PGP-6
Generator impulsów licznikowych: TAIL PULSE GENERATOR typu RP-1 lub RP-2
Oscyloskop pomiarowy typu TDS-220
Kable i przewody łączące
Literatura pomocnicza
[1] Goulding F.S.: A Fast, High Performance Linear Gate, Rev. Sci. Instr., vol. 38, 1967
[2] Instrukcje obsługi pomocniczej aparatury pomiarowej
[3] Korbel K.: Elektronika jądrowa. Cz.III. Układy i systemy elektroniki jądrowej. Kraków, Wyd. AGH 1987
[4] Kowalski E.: Elektronika jądrowa. Warszawa, OIEJ, PTJ, Seria Aparatura i technika
pomiarowa, nr 76 (359), 1973
77
ĆWICZENIE LABORATORYJNE 14
Mostkowa bramka diodowa
Zakres ćwiczenia
Diagnostyka stałoprądowa bramki.
Pomiar parametrów znamionowych bramki.
Przedmiot ćwiczenia
Przedmiotem ćwiczenia jest uproszczona wersja konfiguracji mostkowej bramki transmisyjnej w układzie Avrahamiego, Grinberga i Seidmana, wykonana w formie laboratoryjnego MODUŁU ĆWICZENIOWEGO. Na rysunku 14.1 podano jej pełny schemat ideowy.
+7V
390
0.3
510
BC107
T3
C
BC177
T1
E
D1
WE
390
A
D2
A
D3
B
D4
1k2
WY
1k5
BC107
F
BC177
T4
D
T2
5k
1k
PIEDEST
75
0.3
560
3k
-7v
GATE
Rys. 14.1. Schemat ideowy mostkowej bramki diodowej
Układ ten stanowi jedną z wielu możliwych realizacji mostkowych bramek
diodowych. Ich centralnym podzespołem funkcjonalnym jest mostek pełnodiodowy lub
diodowo-rezystorowy. Stan przewodzenia na przekątnej transmisyjnej takich układów
wymuszany jest na ich drugiej przekątnej sygnałem bramkującym; z reguły parą sygnałów
(impulsów) komplementarnych, wprowadzających diody w sytuacjach alternatywnych
w stan głębokiego nasycenia względnie głębokiego odcięcia. W wersji będącej przedmiotem ćwiczenia dla uproszczenia układu dopuszczono asymetrię sygnału bramkującego.
78
Przybiera on odpowiednio wysoki poziom w przypadku dodatniej polaryzacji diod (dla
bramki przewodzącej), zapewniający ich wprowadzenie w stan głębokiego nasycenia.
Zamknięcie bramki następuje natomiast w rezultacie odłączenia źródła sygnału
bramkującego, tj. przy zerowej polaryzacji diod.
Formowanie sygnału przełączającego dokonywane jest w zespole komplementarnych
źródeł prądowych (T1-T2), przy czym ich zasilanie ze źródeł zasilania ogólnego uzależnione jest od stanu przewodzenia, sterowanej sygnałem GATE, zwory tranzystorowej
(T3-T4). W układzie przewidziano możliwość niewielkiej zmiany wydajności prądowej
jednego źródła prądowego (T2) dla ewentualnej kompensacji efektu piedestału. Służący
temu celowi potencjometr 5 k oznaczono na schemacie etykietką PIEDEST.
W pełni symetryczne konfiguracje mostkowe bramek diodowych oprócz zdolności
przenoszenia sygnału informacyjnego dowolnej polarności (impulsów dodatnich, ujemnych
i bipolarnych), charakteryzują się generalnie bardzo dobrymi własnościami. Jakiekolwiek
odstępstwa od zupełnego zbalansowania układu powodują mniejszą lub większą ich
degradację. Tak też prostota układowa badanej bramki okupiona została pogorszeniem jej
własności, w szczególności zaś wydatnym wzrostem efektu przesłuchu.
Program ćwiczenia – instrukcja szczegółowa
Zadanie 14.1. Pomiary stałoprądowe
Celem tych pomiarów jest wyznaczenie zależności potencjałów w zaznaczonych
węzłach bramki w funkcji napięcia sterowania bramki VG w jej stanie jałowym
(bez sygnału informacyjnego) oraz charakterystyki statycznej przenoszenia bramki
VWY= = f(VWE=) w warunkach jej otwarcia ustalonych zadaną (stałą) wartością nominalną
napięcia VG(ON) = 0. Układ pomiarowy dla wykonania pierwszego zadania ilustruje schematycznie rysunek 14.2.
PUNKTY POMIAROWE
WE
WY
34401A
DUT
GATE
+7V
-7V
V-540
VG
KB-60-01
Rys. 14.2. Schemat układu do statycznych pomiarów parametrów bramki
Wykorzystano w nim zestaw zasilaczy niskiego napięcia KB-60-01 zarówno do zasilania elementów aktywnych bramki (+ 7 V, – 7 V), jak również w charakterze regulowanego
źródła napięcia bramkującego VG. Oprzyrządowanie tej serii pomiarów stanowią dwa
wielozakresowe woltomierze cyfrowe: pierwszy do pomiaru napięcia bramkującego, a dru-
79
gi, podłączany stosownie do potrzeb ćwiczenia, do odpowiednich zacisków na płycie czołowej modułu ćwiczeniowego – do pomiaru istniejących w tych punktach napięć.
Pomiary przeprowadzić w zakresie napięć bramkujących od 0 do – 6,0 V z dobieranym poskokiem napięcia stosownie do wielkości wywoływanych nim zmian napięć
mierzonych. Rezultaty pomiarów przedstawić graficznie w formie zależności VC = f(VG),
VD = f(VG), oraz {VA – VB} = f(VG). Na podstawie ich przebiegów sformułować ewentualne
wnioski i uwagi. Odnotować dla sprawdzenia wartości napięć VE i VF.
Rysunek 14.3 pokazuje schemat układu do statycznego pomiaru charakterystyki
przenoszenia bramki. Korzysta on z tych samych urządzeń pomiarowych i zasilających,
jakie zastosowano w przypadku poprzednim. Przez zwarcie gniazda wejściowego ( GATE)
do masy wymusza się trwale stan przewodzenia bramki. W tak zdeterminowanych
warunkach należy przeprowadzić pomiary poziomu napięcia wyjściowego bramki VWY=
dla stopniowo zwiększanych wartości poziomu napięcia wejściowego VWE=. Pomiarami
objąć cały zakres nominalny napięć wejściowych (3 V + 3 V) z poskokiem poziomu
VWE= 0,2 V.
KB-60-01
VG
34401A
34401A
+7V
-7V
WY
WE
DUT
GATE
Rys. 14.3. Schemat zestawu do pomiaru charakterystyki przenoszenia bramki
Na podstawie uzyskanych wyników wykreślić charakterystykę przejściową
VWY= = ,f(VWE=) oraz wyznaczyć dla tych warunków wartość współczynnika przenoszenia
bramki KON=.
Zadanie 14.2. Pomiar opóźnienia otwarcia bramki tON
Zestawić układ pomiarowy według rysunku 14.4.
KB-60-01
TDS 220
VG
34401A
PGP-6
+7V
-7V
CH.1.
CH.2.
WE
DUT
GATE
WY
Rys. 14.4. Schemat zestawu do pomiaru opóźnienia bramki
80
Wejście transmisyjne bramki spolaryzować stałym napięciem o poziomie + 3,0 V,
a na wejście sterujące (GATE) podać z generatora impulsów PGP-6 uformowaną w nim
unipolarną falę prostokątną ujemnej polarności o amplitudzie VG = 2,0 V i okresie
Ti 2 s. Sygnał ten podać równolegle na kanał wiodący (z przywiązaną synchronizacją
podstawy czasu) oscyloskopu, a na jego kanał podporządkowany, sygnał wyjściowy bramki
VWY. Dokonać oscylograficznego pomiaru wzajemnego przesunięcia czasowego obu
obserwowanych przebiegów. Wielkość ta określa wyznaczany parametr bramki tON.
Zadanie 14.3. Pomiar poziomu przesłuchu bramki
Niniejsze zadanie ćwiczeniowe wykonać również w układzie pomiarowym z rysunku
14.4. Pomiar przeprowadzić w warunkach odcięcia bramki (VG = 2 V) dla dwóch
poziomów sygnału informacyjnego: maksymalnie dopuszczalnego (+/ 3,0 V) oraz połowy tej wartości. Skomentować wyniki pomiaru.
Zadanie 14.4. Pomiar czasu narastania tr i współczynnika przenoszenia
sygnałów impulsowych KON~
Zmodyfikować układ pomiarowy wykorzystywany w poprzednim zadaniu do postaci
przedstawionej na rysunku 14.5. (Podłączyć generator PGP-6 na wejście transmisyjne
bramki (WE), natomiast wejście sterujące (GATE) zewrzeć z masą)!
TDS 220
KB-60-01
+7V
PGP-6
-7V
CH.1.
CH.2.
WY
GATE
DUT
WE
Rys. 14. 5. Schemat zestawu do pomiaru czasu narastania i współczynnika przenoszenia bramki
W ten sposób bramka utrzymywana jest w stanie trwałego przewodzenia (VG = 0).
Standardową techniką 1090% przeprowadzić dwie serie pomiarów czasów narastania
odpowiedzi (VWY) bramki na wymuszenia (VWE) impulsami prostokątnymi polarności
dodatniej i ujemnej o amplitudzie równej odpowiednio 3,0 V.
W tym samym układzie dokonać pomiaru charakterystyki przejściowej VWY~ = f(VWE~)
dla sygnału impulsowego zadanego w formie bipolarnej fali prostokątnej. Generator impulsów należy w tym celu przełączyć w odpowiedni tryb pracy. Pomiary poziomu wymuszenia i odpowiedzi przeprowadzić za pomocą oscyloskopu pomiarowego TDS 220.
81
Wyniki pomiarów bezpośrednich zestawić w tabelce, a na ich podstawie wyznaczyć
wartość współczynnika KON~. Porównać uzyskaną wartość z rezultatem zadania 14.1
(KON=).
Zadanie 14.5. Pomiar i kompensacja piedestału
Efekt piedestału, to jest różnica poziomu jałowego bramki na wyjściu w jej alternatywnych stanach przewodzenia, powstaje w wyniku niedoskonałego zbalansowania układu.
Pomiar tej wielkości daje się więc zrealizować w prosty sposób na gruncie powyższego
określenia, mierząc skok potencjału na wyjściu bramki przy przełączaniu jej stanu pracy
nominalnym sygnałem bramkującym (VG(ON/OFF) ) w warunkach zerowego sygnału wejściowego (VWE = 0). Praktycznie należy wykorzystać w tym celu układ pomiarowy
z rysunku 14.4, odłączając tylko wejście transmisyjne bramki od źródła sygnału. W tym
przypadku przedmiotem obserwacji i pomiaru oscylograficznego będzie amplituda formowanej na wyjściu bramki odpowiedzi.
W razie stwierdzenia zbyt dużej wartości napięcia piedestału należy dokonać
kompensacji tej wielkości za pomocą przewidzianego w tym celu potencjometru
nastawczego (helitrimu dostępnego pod płytą czołową modułu od strony wyłącznika).
Uzyskane wyniki pomiarów porównać z rezultatami symulacji komputerowej
zamieszczonymi w dodatku D.
Wyposażenie stanowiska ćwiczeniowego
Moduł ćwiczeniowy: BRAMKA LINIOWA BIPOLARNA
Zasilacz niskiego napięcia typu KB-60-01
Generator impulsów PGP-6
Woltomierze cyfrowe typu HP 34401 A
Oscyloskop pomiarowy typu TDS-220
Kable i przewody łączące
Literatura pomocnicza
[1] Avrahami Z., Grinberg J., Seidman A.: A fast active linear gate. Nuclear Instruments
and Methods, vol. 95, 1971, 61
[2] Instrukcje obsługi konwencjonalnej aparatury elektronicznej używanej w ćwiczeniu
[3] Korbel K.: Elektronika jądrowa. Cz. III. Układy i systemy elektroniki jądrowej. Kraków, Wyd. AGH 1987
[4] Kowalski E.: Elektronika Jądrowa. Warszawa, OIEJ, Postępy Techniki Jądrowej,
Seria: Aparatura i technika pomiarowa, nr 76 (359), 1973
82
ĆWICZENIE LABORATORYJNE 15
Liniowa bramka transmisyjna 1105
Zakres ćwiczenia
Pomiar własności i parametrów znamionowych bramki:
pomiar współczynnika przenoszenia bramki KON,
pomiar nieliniowości całkowej i,
pomiar czasu narastania tn i opadania to odpowiedzi na wymuszenie impulsem (t),
pomiar napięcia przesłuchu VSFT,
pomiar napięcia piedestału VPED,
pomiar przenikania sygnału bramkującego VGFT.
Przedmiot ćwiczenia
Przedmiot ćwiczenia stanowi bramka liniowa systemu CAMAC-POLON typu 1105.
Konfiguracja ta jest wzorowana na prototypie zrealizowanym przez Battistę według
koncepcji Fairsteina. Jej uproszczony schemat ideowy przedstawia rysunek 15.1. Zasada
+ Vzas
Ro
WEINV
10p
1k2
8k06
WEN.INV PRZEŁĄCZNIK
T2
T1
POLARNOŚCI
T4
T3
18p
18p
22
22
2 x 2N3680
4k02
GATE
4k02
BF519
+ Vzas
T8
BSXP93
2k2
T5
T6
1k
680
BF519
1k8
17pF
1k
VK
T7
11k
WZM.WY.
W
Y
BF519
3k6
TRIG.
8k06
510
2k2
BZP630C16
- Vzas
Rys. 15.1. Schemat ideowy liniowej bramki transmisyjnej 1105
pracy tej bramki polega na sterowanym blokowaniu elementu aktywnego w torze transmisji
sygnału, co kwalifikuje ją do kategorii bramek aktywnych. Dwa identyczne stopnie różni-
83
cowe (T1, T2, T5 oraz T3, T4, T6) pracują przemiennie na wspólną rezystancję obciążenia Ro,
przełączane działaniem sygnału bramkującego. Dzięki temu, przy starannym ich zbalansowaniu, efekt piedestału zostaje maksymalnie zredukowany. Wysoką stabilność układu i liniowość przenoszenia sygnału zapewnia ujemne sprzężenie zwrotne obejmujące przełączane stopnie różnicowe oraz wyjściowy wzmacniacz operacyjny.
Program ćwiczenia instrukcja szczegółowa
Zadanie 15.1. Pomiar współczynnika przenoszenia i nieliniowości całkowej
bramki
W celu wyznaczenia wartości współczynnika przenoszenia bramki KON należy zdjąć
jej charakterystykę przejściową WEJŚCIE WYJŚCIE. Na jej podstawie należy również
określić zakres liniowości bramki oraz jej nieliniowość całkową i. Pomiary przeprowadzić
w układzie podanym schematycznie na rysunku 15.2.
ZAS.”CAMAC”
CFG 280
TDS 220
+6V -6V +24V -24V
CH.1
GATE
VG
DUT
CH.2
WY
WE
Rys. 15.2. Schemat układu do pomiaru podstawowych własności bramki
Generator funkcji (CFG 280) przełączyć w tryb generacji sygnału sinusoidalnie
zmiennego i nastawić jego częstotliwość na wartość f = 10 kHz.
Wybrać tryb pracy bramki ustawiając odpowiednio położenia przełączników
INV/NONINV oraz OPEN/CLOSED.
Na wejście bramkujące GATE INPUT badanej bramki podać z ogólnego zasilacza
niskiego napięcia (CAMAC) napięcie +6V, wprowadzając bramkę w stan otwarcia.
Sygnał z generatora funkcji podać na wybrane uprzednio wejście sygnałowe bramki
oraz na wejście drugiego kanału CH-2 oscyloskopu cyfrowego (TDS 220).
Wejście pierwszego kanału CH-1 tego oscyloskopu połączyć z wyjściem sygnałowym
bramki OUTPUT.
Dokonać pomiaru amplitud sygnału wyjściowego i wejściowego w zakresie od 0,5 do
12 V co 0,5 V. Wyniki zestawić w tabelce oraz w formie wykresu charakterystyki
przejściowej bramki. Metodą regresji liniowej wyznaczyć przebieg charakterystyki idealnej
84
oraz wartość współczynnika przenoszenia KON. Na tej podstawie wyznaczyć
współczynnika nieliniowości całkowej i.
wartość
Zadania 15.2. Pomiar czasu narastania r i czasu opadania d
Korzystając z tego samego zestawu pomiarowego, przełączyć generator funkcji w tryb
generacji ciągu impulsów prostokątnych [(t)]. Nastawić wartości amplitudy Vi max i czasu
trwania ti impulsów generatora odpowiednio równe: Vi max = 10 V oraz ti = 1s. Za pomocą oscyloskopu cyfrowego dokonać pomiaru czasów narastania i opadania zarówno
impulsów wejściowych, jak i wyjściowych. Ocenić opóźnienia wnoszone przez bramkę.
Zadanie 15.3. Pomiar napięcia przesłuchu bramki
W zestawie pomiarowym z rysunku 15.2 odłączyć wejście bramkujące INPUT GATE
od źródła napięcia zasilania (+6V) i zewrzeć je bezpośrednio z masą, ustalając w ten
sposób stan odcięcia bramki.
Dokonać pomiaru amplitudy sygnału wyjściowego, otrzymywanego w odpowiedzi na
sygnał wejściowy o maksymalnie dopuszczalnej amplitudzie równej 10 V. Przerysować
z ekranu oscyloskopu przebieg obserwowanego sygnału.
Zadanie 15.4. Pomiar piedestału i przenikania sygnału bramkowania
Zmodyfikować układ pomiarowy do postaci przedstawionej na rysunku 15.3 .
ZAS.”CAMAC”
TDS 220
CFG 280
+6V -6V +24V -24V
CH.1
GATE
DUT
CH.2
WY
WE
Rys. 15.3. Schemat układu do pomiaru piedestału i przesłuchu sygnału bramkującego
Generator funkcji przełączyć w tryb generacji fali prostokątnej, ustalając jej amplitudę
na poziomie +6V. W warunkach zwartego bezpośrednio do masy wejścia sygnałowego,
dokonać pomiaru przesunięcia poziomu na wyjściu bramki. Z mocy definicji określa ono
wartość napięcia piedestału.
Zaobserwować ewentualne przenikanie sygnału bramkującego w momentach
przełączania bramki. Opisać jego kształt oraz ocenić wysokość i czas trwania.
85
Wyposażenie stanowiska ćwiczeniowego
Moduł ćwiczeniowy: BRAMKA LINIOWA typ 1105
Generator funkcji typu CFG 280 lub generator wielofunkcyjny HP 33120A
Cyfrowy oscyloskop pomiarowy typu TDS 220
Zasilacz niskiego napięcia systemu CAMAC
Kable i przewody połączeniowe
Literatura pomocnicza
[1] Battista A.: Simple, High Performance Linear Gate for Nuclear Physics Applications.
Nucl. Instr. and Methods, vol. 80, 1970, 172
[2] Instrukcja obsługi: Bramka liniowa 1105. Warszawa, ZZUJ POLON 1974
[3] Korbel K.: Elektronika jądrowa. Cz. III. Układy i systemy elektroniki jądrowej. Kraków, Wyd. AGH 1987
86
ĆWICZENIE LABORATORYJNE 16
Stabilizator spektrometru
Zakres ćwiczenia
Ustawienie parametrów stabilizatora.
Pomiar współczynnika stabilizacji S.
Pomiar względnej degradacji rozdzielczości .
Pomiar szybkości korekcji wzmocnienia SKW.
Pomiar zakresu stabilizacji D.
Przedmiot ćwiczenia
Przedmiotem ćwiczenia jest STABILIZATOR PIKU w układzie Grinberga, zestawiany
samodzielnie przez ćwiczących z rozporządzalnych wkładek aparatury systemu
STANDARD. Rysunek 16.1 podaje blokowy schemat takiego zestawu. Komercyjnie
dostępne bloki funkcjonalne uzupełniono w nim specjalnie zaprojektowaną wkładką
INTEGRATORA RÓŻNICOWEGO, wyposażając nadto blok ZASILACZA WYSOKIEGO
NAPIĘCIA ZWN-21 w obwód sterowania sygnałem napięciowym.
WL-41
do MCA
A-21 „Y”
WL-41
L.SCYNT.
EREF
A-21 „Z”
INT. RÓŻN.
ZWN21
ZWN-21
Rys. 16.1. Schemat blokowy zestawu stabilizatora spektrometru amplitudowego
Układ Grinberga wywodzi się z oryginalnej konfiguracji de Waarda. Dla monitoringu
globalnego wzmocnienia systemu (G) wykorzystuje on referencyjne, monoenergetyczne
źródło promieniowania o energii przewyższającej nominalny zakres pomiarowy spektrometru.
Dla przypomnienia zasady działania stabilizatora, na rysunku 16.2 przedstawiono
schematycznie łączny spektrogram analizowanego (mierzonego) promieniowania oraz
(zakreślone owalem) widmo promieniowania źródła referencyjnego. Oznaczono na nim
również położenie wierzchołka widma źródła referencyjnego (VpR) w warunkach
nominalnych, to jest dla założonej wartości globalnego wzmocnienia (G) toru spektro-
87
metrycznego. Replika napięcia VpR służy jako reper, względem którego w bloku formowania sygnału błędu monitorowane są, wywołane efektami destabilizującymi, ewentualne
przesunięcia piku referencyjnego.
<f>
VpR
E, Vo
ZAKRES POMIAROWY
Rys 16.2 Ilustracja wzajemnego usytuowania widma mierzonego i referencyjnego
Mechanizm formowania sygnału błędu zilustrowano poglądowo na rysunku 16.3.
Ukazuje on położenia piku referencyjnego w nominalnym stanie pierwotnym oraz w stanie
podwyższonego wzmocnienia. W pierwszym przypadku współrzędna napięciowa wierzchołka piku pokrywa się z zadaną wielkością referencyjną VpR. Z tego względu ilości
zliczeń NA i NB rejestrowane w kanałach pomiarowych A i B wobec symetrii piku są takie
same, a w konsekwencji ich różnica jest równa zero. Odpowiedzią integratora różnicowego
na ciągi impulsów obu kanałów jest w tym przypadku również zerowy sygnał wyjściowy;
stan pracy systemu pozostaje zatem niezmienny.
VpR
Vp0
POŁOŻENIE
PIK PRZESUNIĘTY
PIERWOTNE
NA NB
KANAŁY: A
B
Rys. 16.3. Ilustracja sposobu formowania sygnału korekcyjnego
Zauważmy, że kanały pomiaru ilości zliczeń są przywiązane do napięcia referencyjnego VpR, zaś ilości zliczeń (a dokładniej mówiąc – szybkości zliczeń) reprezentują
na diagramie powierzchnie pod obwiednią piku ograniczone szerokościami kanałów.
W przypadku drugim NB jest większe od NA, dając w efekcie sygnał niezrównoważenia,
wykorzystywany w stowarzyszonym bloku wykonawczym (efektorze) do odpowiedniej
korekcji wzmocnienia globalnego. W stanowiącej przedmiot ćwiczenia konfiguracji
funkcję efektora pełni wzmacniacz w pętli ujemnego sprzężenia zwrotnego stabilizowanego
zasilacza wysokiego napięcia.
88
Program ćwiczenia instrukcja szczegółowa
Zadanie 16.1. Przygotowanie zestawu do pomiarów
a)
b)
c)
d)
Zestawić układ pomiarowy według schematu podanego na rysunku 16.4.
W warunkach rozpiętej pętli autoregulacji (Klucz K rozłączony) nastawić, podaną
przez prowadzącego zajęcia, nominalną wartość wysokiego napięcia ( ZWN-21),
zasilającego fotopowielacz licznika scyntylacyjnego. (W razie braku specjalnych
dyspozycji przyjąć wartość VWN = 800V).
Ustawić na analizatorze A-21 „X” położenie piku VP(X) mierzonego rozkładu amplitudowego oraz szerokość kanału pomiarowego VKAN(X) . Proponowane wartości uzgodnić z prowadzącym zajęcia. (W razie braku specjalnych zaleceń przyjąć wartości:
VP(X) = 8,0V, oraz VKAN(X) = 0,2V).
Ustalić i nastawić w analizatorach „Y” i „Z” poziomy determinujące szerokości i położenia ich okienek pomiarowych. (Uzyskanie pożądanych, możliwie dużych szybkości
zliczeń w kanałach zapewniają wartości ich szerokości VKAN(Y-Z) oraz położeń ich
centroid: VP(Y) i VP (Z) odpowiednio na poziomie 0,6V, 7,7V i 8,3V).
ILL-21
L.SCYNT.
alternatywa:
MCA
A-21 „X”
WL-41
P- P-44
44
K
A-21 „Y”
INT.RÓŻN.
WL-41
A-21 „Y”
ZWN21
A-21 „Z”
34401A
ZWN-21
TDS 220
Rys. 16.4 Schemat blokowy zestawu ćwiczeniowego
e)
f)
Wstawić do uchwytu na obudowie licznika scyntylacyjnego wzorcowe źródło promieniowania (Cs-137).
Dobrać wartość wzmocnienia wzmacniacza impulsowego (WL-41) przy zadanych
wartościach stałych czasowych (i = d = 5 s) dla uzyskania maksimum wychylenia
wskaźnika analogowego w integratorze liniowym (ILL-21). (Przy zadanych przykładowo wartościach VWN, VP(i) oraz VKAN(i) warunki takie uzyskuje się dla położenia
przełącznika regulacji zgrubnej (COARSE) wzmocnienia [4 x 4 x 8]). Następnie doregulować precyzyjnie wzmocnienie za pomocą potencjometru regulacji drobnej
(FINE), kierując się wskazaniami woltomierza kontrolnego 34401A, zapiętego na
wyjściu INTEGRATORA RÓŻNICOWEGO, które powinny być sprowadzone do
89
(lokalnego) minimum. Skorygować położenie źródła promieniotwórczego aż do uzyskania częstości zliczeń w kanale piku VK(X) około 150 s-1.
Zadanie 16.2. Pomiar współczynnika stabilizacji S i względnej degradacji
rozdzielczości
Współczynnik stabilizacji spektrometru zdefiniowany jest jako stosunek względnych
przesunięć położeń wierzchołków pików widma źródła referencyjnego spowodowanych
takim samym zaburzeniem destabilizacyjnym w warunkach otwartej i zamkniętej pętli
autoregulacji (sprzężenia zwrotnego). Oznaczając symbolami VpR, VpO oraz VpS położenia
wierzchołków piku referencyjnego, odpowiednio, przed zadziałaniem czynnika destabilizującego oraz po jego zadziałaniu w warunkach otwartej (0) i zamkniętej (S) pętli
sprzężenia zwrotnego, formuła definiująca współczynnik stabilizacji S przyjmie postać
def
S
V pR V pO / V pR
V pR V pS / V pR
Rysunek 16.5 pokazuje – celowo przesadnie uwypuklone – relacje między wielkościami VpR, Vp0 oraz VpS.
VpR VpS
Vp0
<f>
Vo
Rys. 16.5 Ilustracja przesunięć piku referencyjnego przy załączonej (S)
i wyłączonej (0) autoregulacji
a)
W ustalonych w zadaniu 16.1b warunkach za pomocą subzestawu pomiarowego:
analizator A-21 „X” przelicznik P-44, wyznaczyć rozkład amplitudowy impulsów
uzyskiwanych w pomiarze promieniowania źródła kontrolnego. Przyjąć czas zliczania
t =100 s. (W przypadku dostępności analizatora wielokanałowego ( MCA) skorzystać z tej możliwości pomiaru).
b)
Wprowadzić „zaburzenie” wzmocnienia globalnego poprzez skokową zmianę napięcia
zasilania fotopowielacza VWN i w tak zmienionych warunkach wyznaczyć powtórnie
rozkład amplitudowy impulsów detektora.
c)
Włączyć działanie pętli autoregulacji (zewrzeć klucz K) i przywrócić początkowy stan pracy jak w zadaniu 16.2a, a następnie dokonać pomiarów według procedury podanej w zadaniu 16.2b.
90
d)
Z uzyskanych danych pomiarowych wyznaczyć położenia wierzchołków pików
(wartości VpR, VpS i Vp0) i zgodnie z zależnością definicyjną określającą współczynnik stabilizacji S obliczyć jego wartość.
e)
Wykreślić diagramy rozkładów amplitudowych na podstawie danych pomiarowych
i wyznaczyć wartości szerokości połówkowych pików E0 (przy wyłączonej autoregulacji) oraz ES (z zamkniętą pętlą autoregulacji). Wielkości te wyznaczają
kolejny parametr znamionowy stabilizatora zwany względną degradacją
rozdzielczości () zdefiniowany formułą
def
ES E0
.
E0
Korzystając z powyższej formuły wykonać stosowne obliczenia.
Zadanie 16.3. Pomiar szybkości korekcji wzmocnienia SKW
i zakresu stabilizacji D
Mianem szybkości korekcji wzmocnienia określony jest czas, w ciągu którego wprowadzona skokowo zmiana wzmocnienia ulega redukcji od 90% do 10% swej wartości początkowej. Eksperymentalnie parametr ten wyznaczany jest pośrednio przez pomiar czasu
reakcji układu na wprowadzone skokowo zaburzenie.
a)
Nastawić parametry pracy układu jak w zadaniu 16.2a.
b)
Włączyć oscyloskop z pamięcią na wyjściu integratora różnicowego.
c)
Wprowadzić skokowe zaburzenia wzmocnienia jak w zadaniu 16.2b i za pomocą
oscyloskopu z pamięcią zarejestrować przebieg nieustalony. Wyznaczyć stałą czasową
jego zaniku zan. Obliczyć wartość parametru SKW zgodnie z konwencją 90%10%
według której
0,46
SKW
.
zan
d) Powtarzając wielokrotnie pomiary według powyższej procedury przy systematycznie
zwiększanym stopniu destabilizacji, odnotować wartość zaburzenia wzmocnienia, przy
której nie uzyskuje się autoregulacji. Ta graniczna wartość skokowej zmiany wzmocnienia determinuje czwarty parametr znamionowy stabilizatora zwany zakresem
stabilizacji.
Informacje dotyczące sondy scyntylacyjnej i sposobu jej włączenia do systemu
stabilizatora podano w dodatku E, natomiast szczegóły adaptacji zasilacza WN oraz opis
techniczny INTEGRATORA RÓŻNICOWEGO zamieszczono w dodatku F.
91
Wyposażenie stanowiska ćwiczeniowego
Sonda scyntylacyjna SSU 70.2
Wzmacniacz liniowy typu WL-41
Analizatory jednokanałowe typu A-21 3 szt. (ew. MCA)
Zasilacz wysokiego napięcia typu ZWN-21 (uzupełniony obwodem sterowania
napięciowego)
MODUŁ ĆWICZENIOWY: INTEGRATOR RÓŻNICOWY
Przelicznik impulsów typu P-44
Integrator liniowy (lin-log) typu ILL-21
Obudowy aparatury STANDARD z zasilaczami NN. (3 szt)
Oscyloskop pomiarowy TDS 220
Woltomierz cyfrowy 34401A
Komplet kabli i przewodów połączeniowych
Kontrolne źródło promieniowania [137Cs - 1Ci]
Literatura pomocnicza
[1] Grinberg J., Sabbah B., Schuster M.: A peak stabilized single channel analyzer. Nuclear Instruments and Methods, vol. 82, 1970, 278
[2] Instrukcje fabryczne aparatury STANDARD, ZZUJ POLON
[3] Korbel K.: Elektronika jądrowa. Cz.III. Układy i systemy elektroniki jądrowej. Kraków, Wyd. AGH, 1987
[4] Masny S.: Laboratoryjna aparatura techniki jądrowej na obwodach scalonych STANDARD, Warszawa, OIEJ, Bibl. PTJ, seria: Aparatura i technika pomiarowa, nr 80
(596), 1976
[5] deWaard H.: Stabilizing Scintillation Spectrometers with Counting-Rate-Difference
Feed-back. Nucleonics, vol. 13, No. 7, 1955, 36
92
ĆWICZENIE LABORATORYJNE 17
Filtr niestacjonarny z integratorem bramkowanym
Zakres ćwiczenia
Badania efektu deficytu balistycznego.
Praktyczne zapoznanie z zasadą działania filtru niestacjonarnego z integratorem bramkowanym.
Pomiary podstawowych parametrów znamionowych filtru.
Dobór optymalnych warunków pracy filtru.
Przedmiot ćwiczenia
Przedmiotem ćwiczenia jest zestaw filtru niestacjonarnego obejmujący quasi-gaussowski prefiltr stacjonarny WZMACNIACZA LINIOWEGO WL-41 oraz MODUŁ
DEMONSTRACYJNY integratora bramkowanego. Tego rodzaju konfiguracja zalicza się do
kategorii filtrów niestacjonarnych z kluczowaniem, a ze względu na charakterystyczny
kształt jej funkcji wagi do klasy FILTRÓW TRAPEZOIDALNYCH.
Wymienione bloki funkcjonalne filtru umożliwiają dokonywanie niezależnej regulacji
fragmentów funkcji wagi odpowiedzialnych za rozdzielczość amplitudową i czasową.
W szczególności stromość krawędzi bocznych funkcji wagi, determinowana przez charakterystykę przenoszenia prefiltru (struktura, rząd i wartości stałych czasowych) decyduje
o wartości stosunku sygnału do szumu, natomiast rozciągłość jej płaskiego grzbietu, uzależniona od parametrów bramkowanego integratora (stała czasowa, interwał otwarcia
bramki), w istotny sposób wpływa na czas rozdzielczy filtru.
Walory filtru niestacjonarnego ujawniają się szczególnie w przypadku niestałości
czasu zbierania ładunku w detektorze, manifestującej się odpowiednim zróżnicowaniem
(rozmyciem) deficytu balistycznego. W technice filtracji stacjonarnej efekt ten powoduje
wzrost nieoznaczoności amplitudy, czyli pogorszenie rozdzielczości amplitudowej.
Warunkiem uniezależnienia dokładności pomiaru od wpływu czasu zbierania ładunku
w detektorze jest utrzymanie w tym interwale stałej wartości funkcji wagi filtru. W przypadku filtrów stacjonarnych warunek ten udaje się spełnić z niezbyt zadowalającym przybliżeniem kosztem znacznego zwiększenia ich stałej czasowej, co prowadzi w rezultacie do
niepożądanego, silnego wzrostu czasu rozdzielczego i związanych z tym szkodliwych
efektów.
Stanowiący przedmiot ćwiczenia filtr niestacjonarny pozwala uzyskać stałość funkcji
wagi w obrębie dowolnie nastawianego interwału czasowego. Nadto, po jego upływie zostaje natychmiast przywrócony stan początkowy, a poziom sygnału wyjściowego sprowadzony do zera. W ten sposób ustalony jest zarazem czas rozdzielczy filtru.
Na rysunku 17.1 przedstawiono schemat ideowy MODUŁU ĆWICZENIOWEGO z zaznaczonym skrótowo układem PREFILTRU STACJONARNEGO (WL-41). W strukturze
modułu zawarto aktywny integrator wykonany na scalonym wzmacniaczu operacyjnym
ULY7741, system bramkowania, obejmujący wejściową bramkę równoległą (T1) oraz –
sterowany za pośrednictwem prostego stopnia OE (T2) – klucz (T3) zwierający gałąź
93
sprzężenia zwrotnego wzmacniacza operacyjnego, jak również monowibrator (MW) zadający czas bramkowania integratora TBR.
-24V
24k
T1
510
BC179
2k
WE
SYGNAŁ
PREFILTR
LF 355
510
f
510
510
75
1k
2k
+5V
42k
2k
290
11
WE
TRIG.
180
i
10
+15V
10k
TBR
5
4k1
8k2
14
1
_
Q
2x2N4416
200k
1k
2k
6
1
1k2
Q
T2
KONTR
+5V
WY T3
-15V
10n
BC179
-15V
+15V
100
SN 74121
24k
-24V
10
-15V
Rys. 17.1. Schemat ideowy układu integratora bramkowanego
Program ćwiczenia instrukcja szczegółowa
Zadanie 17.1. Ustalenie optymalnych wartości parametrów
prefiltru stacjonarnego
Zestawić układ pomiarowy według schematu podanego na rysunku 17.2.
GEN.SZUMU BIAŁEGO
PREFILTR
GEN.SZUMU
„1/f2”
+ MIXER
ANAL.AMPL.IMP.
~
~//
WL-41
INTEGRATOR
A-21
ILL-21
t
GEN.IMPULSÓW LICZNIKOWYCH
Rys. 17.2. Schemat zestawu do pomiaru parametrów prefiltru stacjonarnego
94
W zestawie tym korzystamy z zastępczych źródeł sygnału i szumu, symulujących
detektor promieniowania wraz ze stowarzyszonym układem elektroniki front-end.
Jako źródło impulsów licznikowych należy użyć generator typu RP1 i za pomocą jego
organów nastawczych ustalić następujące wartości parametrów sygnału:
czas narastania
tn = 0,1 s,
stała czasowa zaniku
d = 10 s,
amplituda impulsu
Vi max = 2 V,
częstotliwość impulsów
f = 1 kHz.
Charakterystyczny dla naturalnych źródeł szumu detektora i elektroniki wejściowej
kształt rozkładu gęstości widmowej mocy szumu
2
2
w zestawie ćwiczeniowym symulowany jest przez dwa generatory szumów: GENERATOR
SZUMU BIAŁEGO i GENERATOR SZUMU typu (1/f 2). Mieszczący się w module GENERATORA SZUMU (1/f 2) układ MIESZACZA umożliwia sumowanie obu rodzajów szumu
wraz z symulującym sygnał detektora ciągiem impulsów licznikowych dostarczanych przez
generator RP-1.
a) Dokonać pomiaru rozmycia szumowego sygnału (FWHM)Vo na wyjściu wzmacniacza
dla rozporządzalnych wartości stałej czasowej filtru f . Posłużyć się metodą pomiaru
rozkładu amplitudowego impulsów, wyznaczając w pomiarach bezpośrednich położenie (amplitudę) i wysokość (szybkość zliczeń) „piku” oraz przynależną mu szerokość na połowie jego wysokości. Pomiaru poziomu szybkości zliczeń (w „piku” i na
połowie jego wartości na obu jego zboczach) dokonać za pomocą liniowego
INTEGRATORA IMPULSÓW ILL-21, zaś odpowiadające im wartości amplitud impulsów odczytać wprost z obrotowej skali helipotu ustalającego próg dyskryminacji
ANALIZATORA A-21.
b) Przy założeniu gaussowskiego kształtu piku obliczyć wartości średniego odchylenia
standardowego Vo oraz stosunku sygnału do szumu SNR. Wyniki pomiarów i obliczeń
przedstawić w formie wykresu SNR = f(f). Minimalną wartość SNR oraz warunkującą
ją wartość stałej czasowej f uznać za optymalne i przyjąć jako referencyjne
w dalszych procedurach obliczeniowych.
WN 2
Zadanie 17.2. Badanie efektu deficytu balistycznego prefiltru
Zjawisko deficytu balistycznego zostało szczegółowo omówione w dodatku G.
Przedstawiona tam analiza dotyczy najprostszego przypadku, gdy filtr pasmowo-przepustowy tworzą dwa układy formujące pierwszego rzędu: układ różniczkujący C-R i układ całkujący R-C. W badanym układzie filtru niestacjonarnego w charakterze prefiltru wykorzystano wzmacniacz spektrometryczny WL-41. Jego częstotliwości graniczne: górną i dolną
wyznaczają odpowiednio: prosty obwód różniczkujący pierwszego rzędu oraz dolnoprzepustowy filtr aktywny rzędu drugiego. Dla porównania uzyskanych wyników pomiarowych
z obliczeniami teoretycznymi należy zatem skorzystać z zaleceń literaturowych.
95
Zestawić układ pomiarowy według rysunku 17.3.
SYNCHROSKOP
GEN.IMPULSÓW
LICZNIKOWYCH
PREFILTR
RP-1
TDS 220
WL-41
t
~
~//
TRIG
Rys. 17.3. Schemat zestawu do badania efektu deficytu balistycznego
a)
Dla wyznaczonych w poprzednim zadaniu optymalnych wartości parametrów prefiltru
wyznaczyć eksperymentalnie deficyt balistyczny impulsów o dłuższych czasach narastania, a mianowicie:
tn = 0,5 s, 1,0 s i 2,0 s.
b)
Dla tych impulsów dobrać eksperymentalnie wartości stałej czasowej prefiltru, przy
których deficyt balistyczny zostaje praktycznie zlikwidowany, a następnie dokonać
pomiaru wartości przynależnych czasów rozdzielczych według kryterium spadku poziomu odpowiedzi (sygnału wyjściowego) do wartości 1% amplitudy.
Zadanie 17.3. Badanie własności pełnego układu filtru niestacjonarnego
a)
Zestawić złożony filtr niestacjonarny (prefiltr quasi-gaussowski + integrator bramkowany), włączając go do układu pomiarowego ukazanego schematycznie na rysunku
17.4. (Do wyzwalania GENERATORA IMPULSÓW BRAMKUJĄCYCH wykorzystać
impulsy TRIG-OUT generatora RP-1).
b) Wyznaczyć eksperymentalnie optymalne wartości interwału bramkowania integratora
według kryterium „zerowego” deficytu balistycznego oraz przebiegi odpowiedzi na
wymuszenia impulsami o różnych czasach narastania przy różnych wartościach interwału otwarcia bramki TBR.
c) Wykonać pomiary kontrolne rozmycia szumowego sygnału dla całego układu filtru,
oraz wyznaczyć wartość bezwzględnego SNRN i względnego stosunku sygnału do szumu N (odniesionego do filtru idealnego) w funkcji stałej czasowej prefiltru stacjonarnego. Parametry impulsu wejściowego przyjąć jak w zadaniu 17.1 programu
ćwiczenia. Wyznaczenie N przeprowadzić w sposób pośredni; najwpierw określić
R = SNRN /SNR (WL-41) przyjmując za referencyjny, stacjonarny filtr aktywny WL-41
a następnie, uwzględniając wartość SNR(WL-41) /SNR filtru stacjonarnego (0,842)
obliczyć N według oczywistej relacji
N = R [SNR(WL-41) /SNR ] = 0,842 R.
Rezultaty przeprowadzonych pomiarów oraz obliczeń przedstawić w formie wykresu
(SNR)N = f(f).
96
d)
Za pomocą oscyloskopu pomierzyć szerokość impulsu wyjściowego i skopiować
jego przebieg z ekranu oscyloskopu. Porównać uzyskany rezultat z analogicznym
wynikiem uzyskanym w pomiarach wykonanych w ramach zadania 17.2. Sformułować wnioski.
GEN.SZUMU BIAŁEGO
SYNCHROSKOP
TDS 220
PREFILTR + iNT.BR.
GEN.SZUMU
1/f2
+ MIESZACZ
SYGN.
~
~//
DUT
t
ANAL.AMPL.IMP.
IMP TRYG
GEN.IMPULSÓW LICZNIKOWYCH
INTEGRATOR
A-21
ILL-21
Rys. 17.4. Schemat zestawu do badania własności filtru niestacjonarnego
Wyposażenie stanowiska ćwiczeniowego
Moduł ćwiczeniowy: FILTR NIESTACJONARNY Z INTEGRATOREM BRAMKOWANYM (wkładka STANDARD 70)
Wzmacniacz liniowy typu WL-41
Analizator jednokanałowy typu A-21 (wkładka STANDARD 70)
Integrator liniowo-logarytmiczny typu ILL-21 (wkładka STANDARD 70)
Moduł ćwiczeniowy: GENERATOR SZUMU BIAŁEGO (wkładka STANDARD 70)
Moduł ćwiczeniowy: GENERATOR SZUMU 1/f 2 + MIESZACZ (wkładka STANDARD 70)
Obudowa systemu STANDARD 70 z zasilaczem niskiego napięcia ZNN-41
Generator impulsów licznikowych typu RP-1
Oscyloskop pomiarowy typu TDS 220
Kable i przewody połączeniowe
Literatura pomocnicza
[1] Dodatek A do instrukcji ćwiczeniowych
[2] Instrukcje obsługi pomocniczej elektronicznej aparatury pomiarowej
[3] Korbel K., Dąbrowski W.: Filtracja sygnału w spektrometrycznym torze pomiarowym.
Filtry analogowe, Kraków, Wyd. AGH 1992
[4] Masny S.: Laboratoryjna aparatura techniki jądrowej na obwodach scalonych STANDARD, Warszawa, OIEJ, Biblioteka PTJ, Seria: Aparatura i technika pomiarowa,
nr 80 (598), 1976
[5] Radeka V.: Trapezoidal filtering of signals from large germanium detectors at high
rates. Nuclear Instruments and Methods, vol. 99, 1972, 525
97
DODATEK A
Generatory szumów
Źródła szumów, niezbędne dla realizacji zadań przewidzianych programem ćwiczeń,
powinny charakteryzować się odpowiednio wysokim poziomem szumów oraz pożądanym,
założonym kształtem widma częstotliwościowego. Spełnienie tych wymagań osiąga się
poprzez dobór warunków pracy elementu szumogennego (który zwać będziemy „pierwotnym” źródłem szumu) oraz zastosowania dodatkowych układów wzmacniająco-formujących.
Spośród rozporządzalnych źródeł pierwotnych szczególnie wydajnymi okazują się
półprzewodnikowe diody stabilizacyjne ogólnie zwane diodami Zenera pracujące
w reżymie przebicia lawinowego. Tego typu diody zostały wykorzystane w układach generatorów szumu wykonanych specjalnie dla potrzeb ćwiczeń prowadzonych w Laboratorium Elektroniki Jądrowej. Rysunek A1 przedstawia schemat ideowy GENERATORA
SZUMU BIAŁEGO [GSB].
+24V
1n
33k
BZPC12
P
1M
10k
1k
36k
0.3
Д
814B
NE5539
510
0
1k
1n
-24V
300
1n
0.3
10k
BZPC12
WE GEN.
POF-10
BZP683
C6V2
200
300
WY do
oscyloskopu
WY B
470
1n
BZP683
C6V2
200
Rys. A1. Schemat ideowy generatora szumu białego
Pierwotnym źródłem szumu jest w nim dioda stabilizacyjna typu Д814В. Warunki jej
pracy wyznacza nastawiany potencjometrem P prąd zwrotny (ID 45 A), którego
wartość ustalono na podstawie globalnej charakterystyki szumowej diody w paśmie
<100 Hz5 MHz>. Szerokopasmowy wzmacniacz operacyjny NE5539 wzmacnia formowane na zaciskach diody (źródła prądowego) napięciowe widmo szumów do poziomu
VN rms 500 mV. Wyjście modułu wyposażono w dodatkowy, prosty obwód miksujący,
umożliwiający nakładanie szumu na impulsowe sygnały standardowe (opcja dla ćwiczenia
nr 12)
W innej konfiguracji zrealizowano GENERATOR SZUMU typu 1/f 2 (w żargonie technicznym zwanym szumem czerwonym). Ukazano ją na rysunku A2. Transformacja generowanego w diodzie DZ9V1 pierwotnego prądowego widma szumu na widmo
napięciowe dokonywana jest tu w układzie wielostopniowego wzmacniacza z obwodami
lokalnych sprzężeń zwrotnych. Własności transmisyjne wzmacniacza, obok wartości prądu
98
zwrotnego diody, decydują również o kształcie rozkładu widmowego szumów wyjściowych. Na drodze ich racjonalnego doboru uzyskano rozkład zadowalająco przybliżający (w ograniczonym paśmie) zależność 1/ f 2. Konstrukcyjnie omawiany generator związano z sumatorem aktywnym umożliwiającym syntezę sygnału złożonego z impulsowego
sygnału informacyjnego (WE-C) oraz dwóch zakłócających sygnałów szumowych (WE-A)
i (WE-B). Schemat tego subukładu funkcjonalnego zamieszczono również wspólnie ze
schematem generatora szumu, określając cały moduł ćwiczeniowy skrótem [ GSC+M]
GENERATOR SZUMU CZERWONEGO + MIESZACZ.
Obydwa moduły wykonano w formie wkładek systemu aparaturowego STANDARD.
+24V
+ 6V
4k7
200
A 733
22k
0,1
47
100
KV = -10
BZP
C-20
WY
10k
510
200
0,1
a)
- 6V
+ 6V
10
300
WE
CA 3450
10 ║0.1
WY
3 x 150
A
100
B
10 ║0.1
10
C
150
300
- 6V
b)
Rys. A2. Schematy: generatora szumu 1/f2 a) oraz sumatora aktywnego b)
(obydwa układy mieszczą siewe wspólnym bloku GSC+M)
Jak łatwo zauważyć, tor A sumatora przenosi sygnał z mniejszą (nastawialną) wagą niż
pozostałe dwa tory (B i C). W ten sposób zapewniono możliwość ustalania założonych
relacji między intensywnościami obu rodzajów szumu. Własności obu generatorów
ilustruje rysunek A3 przedstawiający widma szumów obu omawianych generatorów,
otrzymywane na wyjściu sumatora WY, po podaniu na jego wejścia A i B odpowiednio
szumu czerwonego i szumu białego. Słaby spadek intensywności szumu białego
spowodowany jest modyfikującym wpływem impedancji obciążenia. Na rysunku zaznaczono również charakterystyczny punkt przecięcia się obu rozkładów widmowych.
W punkcie tym gęstości widmowe mocy obu rodzajów szumu są równe, zaś przynależnej
99
mu współrzędnej częstotliwościowej nadano nazwę narożnej częstotliwości szumowej
(ang. noise corner frequency).
6000
S [V/Hz1/2]
Generator GSC
4000
NAROŻNA
CZĘSTOTLIWOŚĆ
2000
SZUMOWA
Generator GSB
F [MHz]
0,00
0,0
1,0
2,0
3,0
Rys. A3. Rozkłady widmowe szumów generowanych przez GSB i GSC
W charakterze pierwotnych źródeł szumu zastosowano krzemowe diody stabilizacyjne
z dominującym udziałem lawinowego powielania nośników ładunku w procesie przebicia
odwracalnego. Efekt ten manifestuje się na charakterystyce prądowo-napięciowej diody
stabilizacyjnej gwałtownym wzrostem prądu wstecznego przy minimalnym wzroście napięcia polaryzacji zaporowej po przekroczeniu określonego jej poziomu. To graniczne napięcie nazwano napięciem przebicia Vb (ang. breakdown voltage). Określa go formuła
empiryczna
N / 10
Vb 60 Wg / 1,1
3
2
22
3
4,
gdzie:
Wg szerokość przerwy energetycznej półprzewodnika,
N – koncentracja domieszek.
Zmiana nachylenia charakterystyki I -V diody zachodzi w sposób ciągły, stąd też dla
określenia wartości napięcia znamionującej efekt przebicia przyjęto umownie napięcie, dla
którego prąd zwrotny osiąga wartość równą dziesiątej części dopuszczalnej wartości
maksymalnej.
Z punktu widzenia koncentracji domieszek, tego rodzaju diody zajmują pośrednie
miejsce między konwencjonalnymi diodami prostowniczymi a diodami Zenera. W szczególności dla złącz krzemowych charakterystyczny dla przebicia lawinowego obszar koncentracji domieszek zawiera się w granicach (5102021023) m-3, a odpowiadające im
napięcia przebicia mieszczą się w przedziale (1035) V. Wartości tych parametrów mają
istotny wpływ na poziom szumów generowanych w złączu w warunkach pracy na kolanie
zaporowej części charakterystyki diody.
W obszarze tym inicjowany jest proces przebicia złącza. W swym początkowym stadium ma on charakter pojawiających się przypadkowo, krótkotrwałych mikroprzebić, ujawniających się w formie prostokątnych impulsów prądowych o eksponencjalnym rozkładzie
rozciągłości czasowej i stałej amplitudzie.
100
W miarę wzrostu średniej wartości prądu wstecznego diody charakter impulsów
prądowych nie ulega zmianie, wydłuża się natomiast ich szerokość, a amplituda zdąża do
pewnej, określonej wartości maksymalnej. Z chwilą jej osiągnięcia zmienia się gwałtownie
charakter wyładowania z niestabilnego (impulsowego) na stabilne (ciągłe). Efekt ten poglądowo ilustruje rysunek A4 przedstawiający w uproszczeniu kilka przebiegów ciągów
impulsów prądowych mikroplazmy dla różnych wartości średnich prądu wstecznego
(I1 < I2 < I3 < I4 < I5).
I1
I2
I3
I4
I5
t
Rys. A4. Ewolucja impulsów prądowych mikroplazmy w funkcji <ID>
Zjawiska mikroprzebić mają swe źródła w niedoskonałościach (defektach) sieci krystalicznej, na których tworzą się mikroskopijne obszary (o średnicy kilku m), w których
osiągnięcie krytycznej wartości natężenia pola elektrycznego, warunkującego pełne rozwinięcie wyładowania lawinowego, zachodzi przy nieco niższym napięciu przebicia niż
w pozostałej objętości warstwy zubożonej złącza. Wykazuje ono wiele podobieństwa do
lawinowej jonizacji zderzeniowej w gazach. Z tego też względu przez analogię
mikroobszarom tym, o dużej gęstości prądu wyładowania, nadano nazwę mikroplazmy.
Zauważmy, że zapoczątkowanie jonizacji zderzeniowej, prowadzącej w konsekwencji
do wyładowania lawinowego, uwarunkowane jest fluktuacjami swobodnych nośników ładunku w warstwie zaporowej, te zaś produkowane są w różnych współbieżnych procesach
stochastycznych.
Do najważniejszych zaliczane są:
jonizacja termiczna,
proces generacyjno-rekombinacyjny,
emisja polowa (tunelowanie międzypasmowe),
jonizacja fotoelektryczna.
Zapłon mikroplazmy następuje więc z pewnym, uwarunkowanym statystyką tych
procesów, opóźnieniem losowym w stosunku do chwili osiągnięcia krytycznej wartości
pola elektrycznego. Również losowy charakter wykazuje czas życia mikroplazmy i związany z nim moment jej zgaśnięcia. Proces gaszenia mikroplazmy jest bardzo złożony.
Warunkują go głównie fluktuacje prądu mikroplazmy (amplituda i szybkość zmian) oraz
wartości jej lokalnych parametrów elektrycznych i termodynamicznych.
W rezultacie, w ograniczonym zakresie (średniej wartości) prądu wstecznego złącza
(50100 A) mikroplazma podlega sukcesywnemu, losowemu włączaniu (zapłonowi) i wyłączaniu (gaszeniu), którego efekt obserwowany jest w formie stochastycznego ciągu
101
prostokątnych mikroimpulsów prądowych. Taki charakter sygnału prądowego dał podstawę
do zaproponowania modelu oraz elektrycznego schematu zastępczego mikroplazmy. W tym
przedmiocie wysunięto szereg koncepcji szczegółowych. Za najbardziej zaawansowany
uznawany jest tzw. udoskonalony model mikroplazmy Haitza. Na rysunku A5 przedstawiono oparty na tym modelu elektryczny schemat zastępczy. Obok wielkości deskryptywnych mikroplazmy, jak rezystancja szeregowa RS ora ekstrapolowane napięcie przebicia
Vb tudzież zawartych w stochastycznym elemencie bistabilnym (kluczu S) funkcji
opisujących prawdopodobieństwa zapłonu (włączenia) p01 i zgaśnięcia (wyłączenia) p10
mikroplazmy w interwale jednosekundowym, uwidoczniono na nim również pojemność
własną mikroplazmy C i elementy zewnętrznego obwodu polaryzacji złącza (RL,, VG ).
IL
I
RL
S
Vb
V
C
VG
R
S
Rys. A5. Schemat zastępczy generatora mikroplazmy wg modelu Haitza
Istotnym krokiem w doskonaleniu modeli matematycznych mikroplazny okazała się,
podjęta przez Haitza, sugestia Shockleya, dotycząca pojęcia ekstrapolowanego napięcia
przebicia. Wielkość ta zdefiniowana jest na gruncie formuły Shockley’a określającej
(liniową) zależność odwrotności współczynnika powielania M od napięcia V w obszarze
napięć bardzo bliskich wartości napięcia przebicia Vb. Według tej koncepcji ekstrapolowane napięcie przebicia należy rozumieć jako teoretyczną wartość napięcia polaryzacji, jaka – przy hipotetycznym, idealizującym założeniu braku oddziaływań ograniczających – zapewniałaby osiągnięcie w procesie jonizacji zderzeniowej nieskończenie
wielkiej wartości współczynnika powielania nośników ładunku.
Na rysunku A6 przedstawiono dla przykładu, zaczerpnięty z prac Haitza, wykres
ilustrujący sposób wyznaczenia wartości ekstrapolowanej Vb . Uwidoczniono na nim przebieg dwóch charakterystyk pojedynczej mikroplazmy: charakterystyki powielania w procesie jonizacji zderzeniowej (a) oraz charakterystyki prądowo-napięciowej (b). Charakterystyka (b) pozwala wyznaczyć drugi podstawowy parametr modelu RS (tj. wartość
rezystancji szeregowej mikroplazmy), a także poprzez ekstrapolację jej odcinka liniowego
w obszar I 0 wyznaczyć wartość Vb
Nie wnikając w szczegóły warsztatu eksperymentalnego umożliwiającego pomiar tego
rodzaju charakterystyk, wypada choćby zasygnalizować, że dotyczą one zarówno technik
pomiarowych, jak i podlegających badaniom struktur, narzucając w obu dziedzinach bardzo
wyrafinowane wymagania. Łączne wykorzystanie specjalnych i konwencjonalnych technik
pomiarowych pozwala natomiast wyznaczyć wartości dwu pozostałych parametrów
modelu, tj. prawdopodobieństw włączenia (turn-on) mikroplazmy p01(I) oraz jej wyłączenia (turn-off) – p10 (I).
102
I
1/M
60A
0.06
b)
a)
0.04
40A
0.02
20A
V
0.00
21.6
21.8
Vb
22.0
22.2
22.4 [V]
Rys. A6. Ilustracja sposobu wyznaczania wartości ekstrapolowanej napięcia przebicia
Przedstawiony w zarysie model mikroplazmy dotyczy najprostszego przypadku dwupoziomowego przełączania bistabilnego. Bogata literatura przedmiotu dostarcza informacji
o bardziej złożonych mechanizmach przełączania, charakteryzujących się więcej niż dwoma poziomami impulsów prądowych. Złącza wykazujące taką własność przyjęto zwać
złączami o przewodzeniu wielostabilnym (ang. multistable conduction) względnie wielopoziomowym. Bliższe dane na ten temat znajdzie czytelnik w podanej w wykazie materiałów źródłowych obszernej publikacji K.C. Champlina. Do tej właśnie kategorii zaliczają się (praktycznie wszystkie) standardowe, komercyjnie dostępne, diody stabilizacyjne.
Ponadto zwykłe diody lawinowe zawierają dużą liczbę mikroplazm, przy czym część z nich
w zadanym punkcie pracy może znajdować się w stanie stabilnym a część w niestabilnym.
Z charakterem przewodzenia niestabilnego (dwu- lub wielopoziomowego) omawianych diod związany jest wysoki poziom szumów nadmiarowych. Jest on silnie zależny od
wartości napięcia przebicia, a nadto wykazuje nieregularną (nawet w obrębie tego samego
typu diody) zależność od prądu wstecznego. W ogólnym przypadku dyspersja szumów
diody osiąga szereg wyraźnie rozdzielonych maksimów (ang. noise peaks) i minimów (ang.
noise valleys) w miarę wzrostu prądu wyładowania lawinowego, a każdy z pików
szumowych związany jest jednoznacznie z występowaniem mikroplazmy.
Napięcie przebicia i natężenie prądu diody wywierają również istotny wpływ na
rozkład gęstości widmowej mocy generowanych szumów. Poprzez racjonalny dobór typu
diody stabilizacyjnej oraz wartości jej prądu wstecznego można w łatwy sposób zestawić
generator szumów o wysokiej wydajności i pożądanym kształcie widma. Główną wadą
tego rodzaju pierwotnych źródeł szumu, ograniczającą ich możliwości aplikacyjne, jest ich
duża wrażliwość termiczna.
Dla ilustracji omawianych własności diod stabilizacyjnych i ich wzajemnego porównania na rysunku A7 zestawiono charakterystyki szumowe kilku losowo wybranych konwencjonalnych diod o różnych wartościach napięcia stabilizacji (napięcia przebicia). Reprezentują one zależności wartości średniokwadratowych (dyspersji) globalnego szumu
VN rms w szerokim paśmie częstotliwości (BW = <020 MHz >) od prądu wstecznego
diody I.
103
12
80
VN rms
VN rms
1
[mV]
1 – dioda C-20
2 – dioda C-18
3 – dioda Д810
60
40
4 – dioda Д809
5 – dioda 9V1
6 – dioda 6V2
[mV]
8
4
2
5
4
3
20
6
0
0
100
200
300
400
I
I
500 [A]
0
100
200
300
400
500 [A]
Rys. A7. Charakterystyki szumowe różnych typów diod stabilizacyjnych
Jak łatwo zauważyć, pierwszy (najwyższy) pik szumowy wszystkich badanych egzemplarzy mieści się w przedziale prądu wstecznego <50100> A. Jest to jedyna prawidłowość dotycząca wszystkich typów diod. Położenie i amplituda kolejnych pików szumowych związane są prawdopodobnie z niekontrolowanymi w procesie wytwórczym parametrami materiałowymi i technologicznymi. W zakresie większych wartości prądu wstecznego, gdy wyładowanie lawinowe rozciąga się w sposób jednorodny na całe złącze,
intensywność szumów monotonicznie maleje. Stabilność wyładowania w tym obszarze
pozwoliła sformułować (podany przez Hinesa) dobrze pracujący opis teoretyczny, według
którego VN rms f -1.
Rysunek A8 ilustruje wpływ napięcia przebicia na charakter widma generowanych
szumów. Przedstawia on mianowicie przykładowe rozkłady gęstości widmowych mocy
S [V/Hz1/2]
80
60
C-20
40
20
9V1
f [MHz]
0
0.0
2.0
4.0
6.0
8.0
10.0
Rys. A8. Rozkłady widmowe szumów wybranych diod stabilizacyjnych
szumów generowanych przez diody o znacznie różniących się wartościach napięcia
przebicia, (20 V oraz 9 V) pomierzone przy prądzie wstecznym odpowiadającym maksimum natężenia szumu.
104
Literatura
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
Champlin K.S.: Microplasma Fluctuations in Silicon., J. Appl. Phys., vol. 30, Jul.
1959, 1039
Chynoweth A,G., Pearson G. L.: Effect of Dislocations on Breakdown in Silicon
p-n Junctions. J. Appl. Phys., vol. 29, Jul. 1958, 1103
Haitz R.H., Goetzberger A., Scarlett R.M., Shockley W.: Avalanche Effects in Silicon p-n junctions. I. Localized Photomultiplication Studies on Microplasmas.
J. Appl. Phys., vol. 34, Jun. 1963, 1581
Haitz R.H., Goetzberger A.: Avalanche Noise Study in Microplasmas and Uniform
Junctions. Solid-State-Electronics, vol. 6, Nov-Dec. 1963, 678
Haitz R.H.: Model for the Electrical Behaviour of a Misroplasma. J. Appl. Phys., vol.
35, May 1964, 1370
Haitz R.H.: Mechanisms Contributing to the Noise Pulse Rate of Avalanche Diodes.
J. Appl. Phys., vol. 36., Oct. 1965, 3123
Haitz R.H.:Noise of a Self-Sustaining Avalanche Discharge in Silicon: Low Frequency Studies. J. Appl. Phys., vol. 38, June 1967
Haitz R.H., Voltmer F.W: Noise of a Self-Sustaining Discharge in Silicon: Studies
at Microwave Frequencies., J. Appl. Phys., vol. 39, Jun. 1968, 3379
Hines M.E.: Noise Theory for the Read Type Avalanche Diode. IEEE Trans. on
Electron Dev., ED-13, No. 1, January 1966, 158
McIntyre R.J.: Theory of Microplasmas Instability in Silicon. J. Appl. Phys., vol. 32,
June 1961, 983
McIntyre R.J.: Multiplication Noise in Uniform Avalanche Diodes. IEEE Trans. on
Electron Dev. ED-13, No. 1, January 1966, 164
McKay K.G.: Avalanche Breakdown in Silicon. Phys. Rev., vol. 94, May 1954, 877
Rose D.J.: Microplasmas in Silicon. Phys. Rev., vol. 105, Jan 1957, 413
Senitzky B., Moll J.L.: Breakdown in Silicon. Phys. Rev., vol. 110, May 1958, 612
105
DODATEK B
Generator impulsów przypadkowych
Skonstruowany dla potrzeb ćwiczenia nr 5 generator impulsów o przypadkowym
rozkładzie czasowym stanowi tandem dwóch bloków funkcjonalnych:
generatora szumu białego,
dyskryminatora progowego.
Konfigurację tę przedstawiono na rysunku B1 ukazującym w widoku płyty czołowe
obu jednostek składowych.
GENERATOR SZUMU BIAŁEGO (GSB)
DYSKR. PROG. DP-21
REGUL.
WIDMA
WE IMP
WY
WY GENERATORA
WE
WY.
WYOBS
Rys. B1. Widok płyt czołowych wkładek tworzących układ generatora
impulsów o przypadkowym rozkładzie czasowym
Zasada pracy takiego układu oparta jest na charakterystycznym dla szumu białego
gaussowskim rozkładzie wartości chwilowych amplitud. Opisuje go funkcja prawdopodobieństwa p V pr przekroczenia poziomu (progu) Vpr
1 V pr
p V pr
exp
2 N
2 N
1
2
(B.1)
w której symbolem N oznaczono wartość średniego odchylenia standardowego napięcia
szumów (czyli jego wartości średniej kwadratowej VN rms).
Stowarzyszony z generatorem szumu dyskryminator progowy, w reakcji na każdy akt
przekroczenia zadanego poziomu dyskryminacji, wytwarza standardowy impuls wyjściowy
generując w rezultacie ciąg impulsów o statystyce sygnału wymuszającego i średniej częstotliwości <f > podyktowanej częstością przekraczania tego progu przez sygnał szumowy.
Traktując sygnał szumowy jako stochastyczny ciąg mikroimpulsów napięciowych
o zadanym przebiegu v(t) i średniej częstotliwości < f > jego wariancję (2N) określa drugie
twierdzenie Campbella-Francisa
2N V N2 rms f
vt
2
dt
(B.2)
0
W niespektrometrycznym torze pomiarowym szum wraz z sygnałem informacyjnym
(detektora) po odpowiednim kondycjonowaniu przekazywany jest do dyskryminatora
progowego, powodując losowo (w wyniku nakładania się tworzących go mikroimpulsów
106
szumowych) przekroczenie progu dyskryminacji i wygenerowanie fałszujących wynik
pomiaru impulsów szumowych. W pomiarach radiometrycznych efekt ten znany jest pod
nazwą fałszywych zliczeń.
Problematyka impulsów szumowych została podjęta i wyczerpująco rozwinięta przez
Rice’a w ramach ogólnej teorii szumów. Godnymi uwagi są również późniejsze, traktujące
o tych zagadnieniach, opracowania książkowe J.S. Bendata oraz A.B. Gillespiego. Według
ostatniej z wymienionych pozycji edytorskich przedstawiono poniższą analizę.
Jej celem będzie wyznaczenie średniej częstotliwości < f > impulsów szumowych. Skorzystajmy w tym celu z (wywodzącej się z (B.1)) zależności, określającej prawdopodobieństwo tego, iż w pewnym interwale < t, t dt > amplituda sygnału szumowego będzie
zawarta w przedziale <Vpr, Vpr - dVpr>
2
V
1
1 pr
p (V pr ,V pr dVpr )
exp
dV pr
(B.3)
2 V N rms
2V N rms
Analogiczne zależności można napisać dla szybkości zmian poziomu szumu dVNrms/dt
i poziomu dyskryminacji dVpr/dt , które dla skrócenia notacji oznaczać będziemy odpowiednio symbolami VNrms oraz Vpr.
Tak więc wariancja szybkości zmian poziomu szumu przyjmie postać:
2
V Nrms
f v t dt
2
(B.4)
0
a prawdopodobieństwo sytuacji, w której szybkość zmiany sygnału szumowego będzie za
warta w przedziale V Nrms
, V Nrms
dVNrms
, wyniesie
1 V pr
exp
2 V Nrms
2 V Nrms
1
2
dV
pr
(B.5)
Całka wyrażenia (B.5) po wszystkich dodatnich wartościach szybkości zmiany progu
dyskryminacji V2pr określa prawdopodobieństwo pVNrms zachowania przez nią w dowolnej chwili wartości dodatniej. Wynosi ono:
1
exp 1 V pr
p VNrms
2V
2 V Nrms
Nrms
2
dV
pr
(B.6)
0
Skojarzenie wyrażeń (B.3) i (B.6) prowadzi do wyznaczenia prawdopodobieństwa,
z którym sygnał szumu o dodatniej szybkości jego zmian będzie się mieścił w czasie t dt
w przedziale zawartym między Vpr, a Vpr dVpr. Określa go iloczyn
(B.7)
2
1 V 2
1
1 V pr
pr
dV pr exp
pV pr ,V pr dV pr pV pr
exp
dV
2 V pr
2 VNrms
2VNrms
VNrms
Nrms
0
107
Wreszcie dla dopełnienia warunku, aby sygnał szumu osiągnął poziom Vpr nie później niż
dt . Uwzględniając ten związek
w chwili t, zmiana progu dVpr winna się równać V pr
w równaniu (B.7), dochodzimy ostatecznie do wyrażenia określającego prawdopodobieństwo pV pr przechodzenia sygnału szumu przez poziom Vpr z prędkością dodatnią.
pV pr
dt
2V Nrms
V Nrms
exp
1 V pr
2 V Nrms
2
V pr exp
1 V pr
2 V Nrms
2
dV
pr
(B.8)
0
Całka w powyższym równaniu jest określona, a jej wartość jak łatwo obliczyć*)
2
wynosi VNrma
, Wobec tego równanie (B.8) sprowadza się do postaci
pV pr
VNrms
dt
exp
2VNrms
2
1 V pr
2 VNrms
(B.9)
Wynika stąd, że średnia częstotliwość odpowiedzi dyskryminatora na pobudzenie
sygnałem szumowym, czyli tzw. częstotliwość impulsów szumowych (równa prawdopodobieństwu pV pr w interwale jednej sekundy) wynosi
f
V Nrms
2V Nrms
1 Vpr
2 V
e Nrms
2
(B.10)
Czynnik przed eksponentą określa liczbę przejść sygnału szumowego przez poziom
zerowy w ciągu 1 sekundy w kierunku dodatnim nazywaną częstotliwością pozorną <fo>.
*) Obliczenie całki w równaniu (B.8)
Interesująca na całka oznaczona jest całką typu
x exp
1 x 2
dx .
2 w
0
Wprowadźmy w niej podstawienie: x = y (x =
2
1
y ), wobec czego dx
dy .
2 y
Daje ono w wyniku
y
1
1 y dy
y exp
exp
2
2
2 w 2 y 2
2w
dy 1 2 w 2 exp y
2 w2
2
0
0
Wielkość w2 jest odpowiednikiem wariancji V N2rms w równaniu (B.8).
108
w2 .
0
Dla ilustracji przedstawionej analizy na rysunku B2 przedstawiono przykładowy przebieg zależności średniej częstotliwości przewyższeń progu dyskryminacji przez szum
używanego w ćwiczeniu generatora GSB, zdjęty przy wartości prądu polaryzacji zaporowej
diody w obrębie pierwszego piku szumów.
<f>
[Hz]
106
105
<f> = F(Vprog)
104
103
102
10
Vprog
[V]
1
10-1
0
0.20
0.40
0.60
0.80
1.0
Rys. B2. Diagram zależności częstości przewyższeń progu dyskryminacji
przez szum generatora szumu białego (GSB)
Literatura
[1] Rice S.O.: Mathematical Analysis of Random Noise. Bell System Technical Journal,
vol. 23, 282332, July 1944; vol. 24, 46-156, January 1945
[2] Bendat J.S.: Principles and Applications of Random Noise Theory. New York, John
Wiley 1958
[3] Gillespie A.B.: Signal, Noise and Resolution in Nuclear Counter Amplifiers. Oxford,
London, New York, Paris, Pergamon Press 1953
[4] Hasse L., Spiralski L.: Szumy elementów i układów elektronicznych. Warszawa, WNT
1981
[5] Tichonow W.I.: Wybrosy słuczajnych processow. Uspiechy fiziczeskich nauk, T. 77,
nr 3, 1962, 449
109
DODATEK C
Wyznaczanie czasu rozdzielczego układów koincydencyjnych
metodą koincydencji przypadkowych
Bardzo rozpowszechnioną w radiometrii metodą wyznaczania czasu rozdzielczego r
układów koincydencyjnych jest tak zwana metoda koincydencji przypadkowych. Jest ona
oparta na większym od zera prawdopodobieństwie współczesności impulsów
pochodzących od różnych, wzajemnie niezależnych ciągów stochastycznych. Całkowita
niezależność genetyczna (źródłowa) tych ciągów dała asumpt do nadania zdarzeniom
koincydentnym miana koincydencji przypadkowych. W przypadku m-kanałowego układu
koincydencyjnego o czasie rozdzielczym r oraz średnich wartościach częstości zliczeń
(m )
równych odpowiednio n1, n2 , ..., nm częstotliwość koincydencji przypadkowych n KP
określona jest znaną formułą
( m)
n KP
m n1 n 2 ....... n m (rm1)
(C.1)
Dla najczęściej spotykanego w praktyce układu dwukanałowego (m = 2) sprowadza
się ona do prostej postaci.
( 2)
n KP
2 r n1 n 2
(C.2)
( 2)
pozwalającej przy pomierzonych wartościach częstości zliczeń ( n KP
, n1 i n 2 ) wyznaczyć
szukaną wartość czasu rozdzielczego
r
( 2)
n KP
(C.3)
2 n1 n 2
Rysunek C1 ilustruje schematycznie służący temu celowi układ pomiarowy. Zawiera
on dwa wzajemnie ekranowane radiacyjnie (względnie dostatecznie odległe) detektory promieniowania z przynależnymi radioemiterami, wzmacniacze kształtujące, badany układ
koincydencyjny oraz zespół rejestrów (przeliczników) rejestrujących liczby impulsów
w założonym interwale akumulacji.
DETEKTOR 1
n1
r
nKP
n
DETEKTOR 2
2
UKŁAD KOINCYD.
REJESTRY
Rys. C1. Schemat blokowy zestawu do pomiaru czasu rozdzielczego układu koincydencyjnego
110
W konfiguracji tej posłużono się fizycznymi generatorami ciągów impulsów przypadkowych (źródło promieniotwórcze + detektor) i w takim właśnie zestawie dokonywany
jest pomiar czasu rozdzielczego układu koincydencyjnego w ramach ćwiczeń w Laboratorium Radiometrii WFiTJ. Wyłącznie aparaturową alternatywę stanowić może układ
z dwoma niezależnymi elektronicznymi generatorami impulsów o losowym rozkładzie
czasowym.
Formuła (C.1) wywodzi się z ogólniejszej zależności wyprowadzonej dla zespołu m
stochastycznych ciągów impulsów o średnich częstościach zliczeń nk i różnych rozciągłościach czasowych k (dla k=1 ....., m). Poniżej przytoczono (za Kozodajewem) sposób
wyprowadzenia tej zależności.
Zgodnie z terminologią radiometrycznych pomiarów koincydencyjnych poszczególne
ciągi impulsów będziemy wiązać z kanałem pomiarowym; stąd więc indeks k określać
będzie numer kanału. Na rysunku C2 przedstawiono poglądowo usytuowanie na osi czasu
impulsów (przynależnych do rozważanych ciągów) spełniających warunek m-krotnej koincydencji.
dt
n1 1
1
2
3
n2 2
n3 3
ni i
i
nm-1 m-1
m -1
nm. m
m
t
Rys. C2. Diagramy usytuowania impulsów spełniających warunek koincydencji
Wydzielmy na tej osi czasu mały interwał dt, wielokrotnie mniejszy od najmniejszego
spośród wartości k i spróbujmy wyznaczyć prawdopodobieństwo zaistnienia na nim pełnej
(m-krotnej) koincydencji impulsów. Zauważmy, że dla dowolnie wybranego (i-tego)
kanału prawdopodobieństwo pojawienia się w tym interwale (dt) początku jednego z impulsów ciągu wynosi
pi = ni dt
(C.4)
Przypomnieć też wypada, że celem radiometrycznych pomiarów koincydencyjnych
jest w istocie pomiar równoczesności zdarzeń (aktów detekcji promieniowania) generujących ciąg impulsów elektrycznych. Oznacza to, że informacja o momencie zaistnienia
zdarzenia zawarta jest w czole generowanego impulsu. W konsekwencji na to, aby zaszła
koincydencja zdarzeń w pozostałych (oprócz i-tego) kanałach, początki impulsów winny
się mieścić odpowiednio w obrębie zaznaczonych (na lewo od dt) na rysunku C2 interwałów 1,2,3,...., m.
111
Z kolei, prawdopodobieństwo tego, aby w odpowiadającym k-temu kanałowi interwale
k pojawiło się czoło impulsu wynosi
p k 1 e k nk
(C.5)
W praktyce z reguły zachodzi nierówność k nk 1, wobec czego wyrażenie (C.5)
sprowadza się do prostszej postaci
1 – exp (-k nk) = k nk
(C.6)
Prawdopodobieństwo pojawienia się początku impulsu i-tego kanału w zadanym
interwale dt w przypadku, gdy we wszystkich pozostałych kanałach czoła impulsów
mieszczą się odpowiednio w interwałach 1,2,3, ....., m określa zatem iloczyn prawdopodobieństw
dt
i
ni dt k n k
k i
m
k nk
k 1
(C.7)
Analogiczna relacja zachodzi w sytuacji gdy w miejsce i-tego kanału przyjąć dowolny
inny kanał systemu koincydencyjnego. Wszystkie te konkurencyjne przypadki determinują
addytywnie łączne (cakowite) prawdopodobieństwo p zaistnienia w wybranym dowolnie
przedziale czasu dt pełnej (we wszystkich m kanałach) koincydencji. Wyraża je formuła
p
m
m
m
m
k n k dt k n k
i
k 1
i 1
i 1 i k 1
dt
1
(C.8)
Prawdopodobieństwo to wyrażone w relacji do średniej liczby koincydencji przypad(m )
kowych n KP
przybiera postać
( m)
p n KP
dt
(C.9)
Na tej podstawie możemy napisać
( m)
n KP
m
k nk
k 1
i i
1
m
k
k 1
1
i i k nk
(C.10)
W szczególnym przypadku, gdy długości impulsów (równoznaczne z czasami rozdzielczymi poszczególnych kanałów) są jednakowe i wynoszą , formuła powyższa sprowadza się do postaci
(m)
n KP
m ( m 1)
odpowiadającej tożsamościowo formule (C.1).
112
m
nk
k 1
(C.11)
Literatura
[1] Kałasznikowa W. I., Kozodajew M.S.: Detiektory elemientarnych czstic .Ekspierimientalmyje mietody jadiernoj fiziki. Kozodajew M. S. (red.) Moskwa, izdat. „Nauka”
1966
[2] Liwszic A. P.: O wierojatnosti n-sowpadienija. Radiotiechnika i Elektronika, T. II,
Nr. 8, 1957, 947
[3] Sielakin N. M.: Elementy tieorii słuczajnych potokow. Moskwa, Sowietskoje Radio,
1965
113
DODATEK D
Symulacje komputerowe bramki mostkowej
Cennym środkiem wspomagania instrumentalnej diagnostyki (testowania) układów
(urządzeń) elektronicznych jest szeroko stosowana w praktyce projektowania technika
symulacji komputerowej. Pozwala ona zweryfikować podawane w dokumentacji
technicznej (katalogach) dane znamionowe urządzenia względnie w przypadku ich braku
– uzyskać pożądane w tym zakresie informacje.
Zadania ćwiczeń laboratoryjnych mieszczą się w zasadzie w sferze diagnostyki
instrumentalnej. Pożytecznym wydaje się zatem choćby na jednym przykładzie dokonać
konfrontacji uzyskanych tymi metodami wyników z rezultatami odnośnych obliczeń
symulacyjnych. Wybrano w tym celu stanowiący przedmiot ćwiczenia 14 stosunkowo
prosty układ mostkowej bramki liniowej. Rysunek D1 podaje dla przypomnienia ogólną
strukturę tego układu z zaznaczonymi węzłami (punktami) pomiarowymi .
T3
T1
C
I1K
A
D1
WE
D3
B
D2
WY
D4
I2K
T4
D
T2
VG
Rys. D1. Schemat diodowej bramki mostkowej
Przedmiotem symulacji komputerowej są dwa rodzaje charakterystyk statycznych oraz
charakterystyka dynamiczna bramki. Charakterystyki te przedstawiono odpowiednio na
kolejnych rysunkach. W szczególności rysunek D2 podaje statyczną charakterystykę
przenoszenia bramki (tj. zależności poziomu napięcia na wyjściu bramki Vo= od poziomu
wejściowego Vi=) dla bramki zamkniętej i otwartej Na rysunku D3 wykreślono natomiast
zależność potencjałów w wybranych węzłach układu Vk= (dla k = A,B,C,D) oraz wydajności sterowanych źródeł prądowych (I1K, I2K) od napięcia sterującego bramki VG.
114
5.0
4.0
BRAMKA OTWARTA
[V ]
3.0
2.0
NAPIĘCIE VO=
1.0
BRAMKA ZAMKNIĘTA
0.0
-1.0
-2.0
-3.0
-4.0
-5.0
-8.00
-4.00
0.00
NAPIĘCIE VG
4.00
8.00
[V ]
Rys. D2. Diagram symulacyjny charakterystyki statycznej bramki
8,0
VA
NAPIĘCIE Vk
[V ]
PRĄD I1,2
[mA]
6,0
I1k
4,0
2,0
VC
0,0
VD
-2,0
-4,0
i2k
VB
-6,0
-8,0
-8.0
-7.0
-6.0
-5.0
-4.0
-3.0
-2.0
-1.0
0.0
1.0
2.0
NAPIĘCIE STERUJĄCE VG [V ]
Rys. D3. Diagram symulacyjny zależności Vk(VG) oraz Ik(VG)
115
Rysunek D4 ilustruje z kolei (małosygnałowe) własności dynamiczne bramki. Podano na nim przebiegi sygnałów wejściowego i wyjściowego w dwu stanach przewodzenia
bramki – zamkniętej i otwartej.
SYGNAŁ WEJŚCIOWY V i (t)
200 mV
100 mV
0
48 s
49 s
50 s
CZAS t
51 s
52 s
51 s
52 s
SYGNAŁ WYJŚCIOWY VO(t)
200 mV
100 mV
0
-100 mV
topóźn
-200 mV
przesłu
48 s
ch 49 s
50 s
CZAS t
SYGNAŁ STERUJĄCY VG(t)
0
-1.5 V
BRAMKA ZAMKNIĘTA
BRAMKA OTWARTA
-3.0 V
48 s
49 s
50 s
CZAS t
51 s
52 s
Rys. D4. Diagramy symulacyjne ilustrujące własności dynamiczne bramki
DODATEK E
116
Sonda scyntylacyjna SSU-70
Scyntylacyjna Sonda Uniwersalna SSU-70 strukturalnie nie odbiega od konwencjonalnych konstrukcji detektorów scyntylacyjnych. Według założenia projektowego
przeznaczona jest do współpracy z różnego rodzaju aparaturą radiometryczną; zwłaszcza
z systemem aparaturowym STANDARD-70.
Zawiera ona trzy pomieszczone we wspólnej obudowie mechanicznej podzespoły
funkcjonalne:
1) scyntylator (wymienny),
2) fotopowielacz,
3) wzmacniacz wstępny.
W układzie przedwzmacniacza (o wzmocnieniu kv 30) zastosowano konfigurację
OE-OC z przeniesioną do odbiornika sygnału rezystancją obciążenia drugiego stopnia.
Tego rodzaju rozwiązanie pozwala ograniczyć liczbę kabli łączących sondę z urządzeniem
pomiarowo-rejestrującym, wykorzystując do zasilania przedwzmacniacza i transmisji
sygnału jeden wspólny kabel koncentryczny.
S12FS52A
24k
R dob. 560k
20k
+ WN
270k
7x560k
910k
2x6n8 10n
T1
4n7
15n
Sygn.
& NN
160
Połączenie zewnętrzne
T2
2k4
20
47
330
k
10k
BSXP87
50
WL-41
560
BSXP87
+24V
Sygn.
W
E
W
Z
M
15n
1k
Test
Rys. E1. Schemat przedwzmacniacza i zespołu gniazd wzmacniacza WL-41
Zamieszczona na rysunku E1 ikonka ukazuje sposób włączenia sondy do systemu stabilizatora spektrometru poprzez odpowiednie połączenia z obwodami zasilającymi i sygnałowymi bloku wzmacniacza WL-41. Celowi temu służy gniazdo BNC-75 oznaczone na
schemacie symbolem [Sygn.&NN]. Drugie gniazdo tego samego typu [Test] przeznaczone
jest do pomiarów sprawdzających poprawność działania przedwzmacniacza, natomiast
trzecie (wysokonapięciowe) współosiowe złącze typu C-5 [WN] służy do zasilania
obwodów fotopowielacza.
Literatura
117
[1]
Instrukcje obsługi:
Sonda Scyntylacyjna Uniwersalna typ SSU-70. Bydgoszcz, ZZUJ POLON,
Zakład Urządzeń Dozymetrycznych 1975.
Wzmacniacz Linearny WL-41. Warszawa, ZZUJ POLON, Zakład Aparatury
Elektronicznej 1973
[2] Korbel K.: Układy Elektroniki „Front-End”. Kraków, UWND, AGH 2000.
[3] Masny S.: Laboratoryjna aparatura techniki jądrowej na obwodach scalonych „Standard”. Warszawa, OIEJ, Bibl. PTJ, Seria Aparatura i technika pomiarowa, nr 80
(598) 1976.
118
DODATEK F
Subukłady systemu autoregulacji stabilizatora spektrometru
Przyjęty system stabilizacji spektrometru dokonuje – z założenia – korekcji globalnego wzmocnienia toru pomiarowego w pierwszym bloku funkcjonalnym spektrometru
(w liczniku scyntylacyjnym) poprzez regulację napięcia zasilającego fotopowielacz. W tym
celu niezbędne jest napięciowo sterowane źródło wysokiego napięcia. Konwencjonalne
zasilacze tego typu wyposażone są niemal wyłącznie w organa ręcznej regulacji napięcia
(przełączniki, potencjometry). Zachodzi zatem potrzeba ich odpowiedniej adaptacji.
W stosunkowo prosty sposób można jej dokonać w układzie zasilacza ZWN-21, doprowadzając napięcie sterujące (autoregulacji) na wejście sumujące wzmacniacza operacyjnego w układzie formowania napięcia odniesienia zasilacza. Sposób ten ilustruje rysunek
F1, na którym przedstawiono odnośny fragment schematu zasilacza ZWN-21. Jak łatwo
zauważyć działania adaptacyjne sprowadzają się do wmontowania do układu rezystora (R D)
oraz zamocowania na płycie czołowej zasilacza dodatkowego gniazda (oznaczonego
symbolem STER). Tak zmodyfikowany zasilacz zastosowano w stanowiącym przedmiot
ćwiczenia stabilizatorze spektrometru.
200k
47k
ZWN-21
400
+6V
RD
MAA-501
1k5
2xBAY95
5k3
10k
10
210
20k
25k
-24V
BLOK NAPIĘCIA ODNIESIENIA
1k5
Д814E
+24V
Rys. F1. Schemat bloku formowania napięcia odniesienia zasilacza stabilizowanego WN
Kolejny rysunek (rys. F2) przedstawia pełny (wraz z obwodami parametrycznych
stabilizatorów napięcia zasilania) schemat ideowy integratora różnicowego pełniącego
w układzie stabilizatora funkcję źródła napięcia sterującego. Dodajmy, że wartość oraz
polarność tego napięcia jest określoną funkcją stopnia i kierunku destabilizacji systemu.
Różnicowy pomiar szybkości zliczeń zrealizowano w prostej konfiguracji dwu identycznych integratorów liniowych z pompami diodowymi i indywidualnymi stopniami
standaryzującymi (uniwibratorami 74121) zapiętych na różnoimienne wejścia wzmacniacza
operacyjnego (A741). W obu torach przyjęto tylko jeden zakres pomiarowy ustalony
wartościami pojemności dozujących pomp diodowych (Cd = 1 nF) oraz elementów biernych
uniwibratorów determinujących szerokość generowanego impulsu standardowego.
119
Podobnie też w obu torach przyjęto taką samą wartość stałej czasowej integracji dobraną
stosownie do natężenia promieniowania zastosowanego w ćwiczeniu referencyjnego źródła
promieniowania.
74121
WE-II
1n
1M
+ 15 V
10
4
510
11
3
1k
100k
6
5
7
14
1M
22
3k3
8
-
-
WE-I
1k
5
6
4
10
3
11
7 14
+
1n
100k
510
1M
22
1M
-15V
C15V
1k
1k
47n
0.3
10k
-15 V
+5V
910
6
5
1
3k3
-24V
WY
4
741
3
+5V
74121
7
+24V
910
+15V
C15V
0,3
0,3
A209
+15V
0.3
+5V
0.3
Rys. F2. Schemat integratora różnicowego (z przynależnymi stabilizatorami)
Dla uzyskania pożądanego celu autoregulacji dyskryminatory różnicowe KANAŁU
DOLNEGO (X) i GÓRNEGO (Y) należy połączyć odpowiednio z wejściem WE-I i wejściem
WE-II INTEGRATORA RÓŻNICOWEGO. Takie połączenie realizuje stanowiącą podstawę
działania stabilizatora zasadę ujemnego sprzężenia zwrotnego. Zauważmy bowiem dla
przykładu, że spowodowany czynnikami destabilizującymi wzrost wzmocnienia toru spektrometrycznego przesuwa w skali napięciowej – jak to ukazano na rysunku F3 położenie
„piku” względem jego położenia nominalnego, obniżając częstość zliczeń w kanale dolnym
w daleko większym stopniu niż w górnym. Naruszenie równości szybkości zliczeń w obu
kanałach daje w wyniku sygnał korekcyjny powodujący odpowiednie zmniejszenie napięcia wyjściowego zasilacza ZWN-21 zasilającego fotopowielacz, a w konsekwencji
odpowiednią redukcję wzmocnienia globalnego.
VpR
Vp0
POŁOŻENIE PIERWOTNE
PIK PRZESUNIĘTY
NA NB
KANAŁY: A
B
Rys. F3. Ilustracja sposobu formowania sygnału korekcyjnego
120
Oznaczenia odnośnych wejść integratora różnicowego uwidoczniono na rysunku F4
przedstawiającym rozmieszczenie gniazd na płycie czołowej wkładki STANDARD, w której zmontowano ten układ.
INTEGRATOR RÓŻNICOWY.
WY
WE II
WE I
Rys. F4. Płyta czołowa integratora różnicowego
Własności zespołu IR-ZWN (integrator różnicowy zasilacz wysokiego napięcia)
ilustruje rysunek F5 przedstawiający zależność napięcia wyjściowego zasilacza VWN od
różnicy częstotliwości impulsów w obu kanałach stabilizatora piku (<f> = <fG>-<fD>)
808
VWN
[V]
804
806.3
803.4
800.6
800.1
800
801.2
797.7
796
794.2
RD=200k
792
-100
-50
0.0
50
100 <f>
[Hz]
Rys. F5. Charakterystyka układu regulacji WN
Literatura
[1] Instrukcja obsługi: Zasilacz Wysokiego Napięcia ZWN 21. Warszawa, ZZUJ POLON,
Zakład Aparatury Elektronicznej 1973
[2] Korbel K.: Elektronika jądrowa. Cz. III. Układy i systemy elektroniki jądrowej. Kraków, Wyd. AGH 1987
121
DODATEK G
Deficyt balistyczny
Spektrometria amplitudowa promieniowania jonizującego z natury swej zalicza się do
kategorii pomiarów balistycznych, w których sygnał wyjściowy jest proporcjonalny do
całkowitego ładunku zebranego na elektrodzie zbiorczej. Sygnał tego rodzaju przyjęto
właśnie określać mianem sygnału balistycznego.
Proces zbierania ładunku w detektorach promieniowania jonizującego przebiega w dobrze określonym przedziale czasu. W uproszczonej analizie formowania odpowiedzi zakłada się jednak na ogół, iż jest on nieskończenie krótki, co jest równoważne przyjęciu dirakowskiego charakteru indukowanego impulsu prądowego
I i (t ) I D (t ) QT (t )
(G.1)
Lepszym przybliżeniem kształtu rzeczywistego impulsu prądowego jest przebieg prostokątny (t). Możemy więc napisać
Q
(G.2)
I i* (t ) I D* (t ) T {H (t ) H (t t n )}
tn
Na całkowitej pojemności obciążenia detektora CT „pierwotne” impulsy prądowe dają
odpowiednie „wtórne” impulsy napięciowe Vi(t) oraz Vi* (t). Opisują je wyrażenia
Q
(G.3)
Vi (t ) T H (t )
CT
Vi* (t )
QT / CT
{t H (t ) (t t n ) H (t t n )}
tn
(G.4)
gdzie:
QT całkowity ładunek niesiony przez indukowany impuls prądowy,
tn czas narastania impulsu napięciowego, równy rozciągłości czasowej impulsu
prądowego (tj. czasowi zbierania ładunku).
Przebiegi opisane równaniami (G.1), (G.2), (G.3) i (G.4) przedstawiono wykreślnie na
rysunku G1.
a)
b) ID
ID
t
t
VD
VD
t
t0
t
t0
tn
Rys. G1. Idealizowane przebiegi impulsów prądowych ID(t) i napięciowych VD(t) detektora:
a) dla ID(t) = Q (t), b) dla ID(t) = Q {H(t) – H(t-tn)}
122
Obciążony zakłóceniami szumowymi impuls napięciowy podlega filtracji w mniej lub
bardziej rozbudowanych filtrach pasmowo-przepustowych. Dla prostoty dalszej analizy
przyjmiemy najprostszy filtr tego rodzaju typu (CR)(RC).
W warunkach filtracji suboptymalnej stałe czasowe obwodu różniczkującego (CR)
i całkującego (RC) takiego filtru d i i są identyczne. Stąd też transmitancję (przepustowość operatorową) tego filtru F (p) , kładąc = d= i , zapiszemy w prostej postaci
p
1
F p
(G.5)
p 1 2
W przypadku wymuszenia dirakowskiego otrzymujemy na wyjściu filtru impuls opisany w postaci operatorowej równaniem
Q 1
p
(G.6)
Vo ( p) T
CT p p p 1 2
którego transformata odwrotna daje jego przebieg czasowy
t
Vo (t )
QT t
e H (t )
CT
(G.7)
o wartości maksymalnej równej
Vo max (QT / C T ) e 1
(G.8)
W przypadku wymuszenia impulsem prostokątnym transformata laplace’owska napięcia wejściowego wynosi
Q / CT 1 e ptn
(G.9)
Vi* p T
tn
p2
Uzyskiwana na wyjściu filtru odpowiedź operatorowa Vo* ( p) przyjmie więc postać
Vo* p
QT / CT 1 e ptn
tn p p 1 2
(G.10)
odwzorowaniem której w dziedzinie czasu jest wyrażenie
Vo* t
t
QT / CT t
1 1 t t n
1
1
e
H
t
tn
e
t t n
H t t n
(G.11)
Wobec nieciągłości powyższej funkcji rozpiszemy ją na dwie części :
1) w przedziale od zera do tn
Vo t
0 t t n
t
QT / CT t
1 1 e H t
tn
(G.12)
123
2) w przedziale od tn do nieskończoności
t t n
t
QT / CT
t t t n
(G.13)
1 1 e 1 1
e
H t t n
t n t
tn
tn
wyrażenie powyższe sprowadzimy do bardziej zwięzłej postaci
Kładąc z kolei
Vo t
Vo*
t
t QT 1 1 t e 1 e e
t n t CT
(G.14)
W celu obliczenia wartości maksymalnej skorzystamy z normalnej procedury
analitycznej. Tak więc przyrównanie pierwszej pochodnej funkcji Vo* (t ) do zera
dVo* t
QT
e
dt
CT
t
1
1
1
t
e 1 e e 1 e 1 0
*
daje w wyniku wartość współrzędnej czasowej t max
*
t max
tn
(G.15)
e
(G.16)
(e 1)
a jej podstawienie do równania przebiegu czasowego napięcia wyjściowego prowadzi do
szukanej wielkości Vo*max
e
Vo*max
Q (e 1) e 1
T
e
CD
(G.17)
Nietrudno zauważyć, że zawsze Vo max Vo*max . Tę oczywistą relację ilustruje rysunek G2 przedstawiający we współrzędnych znormalizowanych przykładowe przebiegi
dwóch sygnałów balistycznych stanowiących odpowiedzi odpowiednio na wymuszenie
skokowe i na sygnał wejściowy o czasie narastania tn = 2.
0,4
Vo
QT / CT
(BD)
0,3
0,2
tw=2
0,1
0
0
2,0
4,0
6,0
8,0
10,0
t
Rys. G2. Ilustracja efektu deficytu balistycznego
124
Różnica amplitud obu sygnałów balistycznych zwana jest deficytem balistycznym,
oznaczanym według terminologii anglosaskiej symbolem BD (Ballistic Deficit).
def
BD
Vo max Vo*max
(G.18)
Bardziej instruktywnym pojęciem jest względny deficyt balistyczny
Ballistic Deficit) definiowany jako
def
RBD
Vo max Vo*max
Vo max
W szczególności dla zadanych wyżej warunków określa go zależność
RBD 1
e
e 1
exp
1
e 1
RBD
(Relative
(G.19)
(G.20)
W praktyce pomiarowej bardzo wygodna i dostatecznie dokładna okazuje się
przybliżona formuła wyprowadzona przez Baldingera i Franzena, dobrze pracująca w przypadkach symetrycznych względem swej centroidy przebiegów prądu wejściowego I i(t).
W przypadku quasi-gaussowskiego filtru suboptymalnego zawierającego pojedynczy
stopień górnoprzepustowy (różniczkujący) i N stopni dolnoprzepustowych (całkujących)
przybiera ona szczególnie prostą postać
RBD
N tn
24
2
N 2
24
(G.21)
Literatura
[1] Baldinger E., Franzen W.: Amplitude and Time Measurement in Nuclear Physics.
Seria „Advances in Electronics and Electron Physics”, vol. VIII, 256, New York,
N.Y., Academic Press Inc.: Publishers 1956
[2] Gillespie A.B.: Signal, Noise and Resolution in Nuclear Counter Amplifiers. Oxford,
London, New York, Paris, Pergamon Press 1953
[3] Goulding F.S., Landis D.A, Hinshaw S.M.: Large Coaxial Germanium Detectors –
Correction for Ballistic Deficit and Trapping Losses. IEEE Trans. Nucl. Sci., vol. 37,
No. 2, 1990
[4] Goulding F.S., Landis D.A.: Ballistic Deficit Correction in Semiconductor Spectrometers. IEEE Tans. Nucl. Sci., vol. 35, No 1, 1988, 119
[5] Korbel K., Dąbrowski W.: Filtracja sygnału w spektrometrycznym torze pomiarowym –
Filtry analogowe. Kraków, Wyd. AGH 1992
[6] Loo B.W., Goulding F.S.: Ballistic Deficits in Pulse Shaping Amplifier. IEEE Trans.
Nucl. Sci., vol. 35, No. 1, 1988, 114
125
DODATEK H
Pomiar impedancji wejściowej wzmacniacza
Standardowa metoda pomiaru impedancji wejściowej wzmacniaczy operacyjnych
korzysta z zależności (H.1) wiążącej stosunek napięć wejściowych Vi1 i Vi2, podanych
odpowiednio za pośrednictwem włączanej na wejściu rezystancji szeregowej R oraz bezpośrednio, dających na wyjściu taką samą wartość napięcia Vo.
[Vi1 / Vi 2 ] 2
1 [ R (2Ri R) / Ri2 ] ( R 2 / X i2 ]
(H.1)
Dla wykazania jej słuszności skorzystamy z zamieszczonego poniżej schematu układu
pomiarowego.
R
kV wzm
Vi1
Ri
Vi2
Ci
V0
Rys. H1. Schemat układu pomiarowego metodą standardową
Podstawę obliczeń stanowią równania obwodowe (H.2) i (H.3)
Vo1 Vi1 Fatt kVwzm
(H.2)
Vo 2 Vi 2 kVwzm
(H.3)
Z założenia metody pomiaru Vo1 Vo2 , wobec czego zachodzi równość
Vi1 Fatt Vo 2
czyli
Vi1 musi 1
Vi 2
Fatt
(H.4)
Dla zadanej konfiguracji dzielnika (attenuatora) jego transmitancja Fatt(p) wynosi
Fatt ( p)
Z i p
R Z i p
Ri /(1 pCi Ri )
R [ Ri /(1 pCi Ri )
R Ri
R
i
i analogicznie przepustowość widmową Fatt(j) opisuje równanie
Fatt ( j)
126
1
R Ri
R jRC i
i
R Ri
R
i
R Ri
R
i
1
pRCi
jRC i
2
2 R 2C 2
i
(H.5)
(H.6)
Oznaczając przez Xi reaktancję pojemności wejściowej wzmacniacza (Xi = 1/Ci)
łatwo dochodzimy do podanej uprzednio formuły (H.1)
Vi1
Vi 2
2
2
R ( 2 Ri R ) R 2
R
2R R 2
R2
1 2 R 2 C i2 1
2 2 1
2
Ri
Ri
Xi
Ri2
Xi
Ri
(H.7)
Praktyczna użyteczność tej metody ograniczona jest kilkoma warunkami. I tak, podstawowym warunkiem jej stosowalności jest wymaganie, aby wprowadzane przez nią
elementy „zewnętrzne” modyfikowały wyłącznie stopień podziału sygnału na wejściu
badanej struktury nie wpływając na jej własności transmisyjne. Warunku tego nie spełniają
układy z zamkniętą na wejściu pętlą sprzężenia zwrotnego. Drugim ważnym warunkiem
jest żądanie zgodności potencjałów spoczynkowych obwodu wyjściowego źródła sygnału
pomiarowego i obwodu wejściowego badanego wzmacniacza. W układach niespełniających tego wymogu konieczne jest wprowadzenie separacji pojemnościowej. W konsekwencji formuła (H.7) przestaje być słuszna. Formalnie można ją skorygować
uwzględniając w dzielniku napięcia również wprowadzoną pojemność szeregową C,
prowadzi to jednak do bardziej złożonej (H.8) postaci nieco kłopotliwej w praktycznym
użyciu.
Vi1
Vi 2
C Ri 2
2
CR C i Ri 2 4 {(CR) 2 (C i Ri ) 2 (CRi ) 2 2C i2 RRi 2C i CRi2 } 2 1
(H.8)
Na rysunku H2 przedstawiono schemat układu pomiarowego uwzględniający
pojemność separującą C. Formuła (H.8) korzysta z oznaczeń schematowych tego rysunku.
R
C
kV wzm
Vi1
Vi2
Ri
Ci
V0
Rys. H2. Schemat układu pomiarowego uwzględniającego separację pojemnościową
Metoda ta okazuje się również mało skuteczna w przypadkach bardzo wysokich oraz
bardzo niskich impedancji wejściowych. Wymienione ograniczenia wykluczają praktycznie
tę wersję metodyczną z bezpośredniego zastosowania w pomiarach badanych wzmacniaczy.
W przypadku bardzo małych wartości pojemności i rezystancji wejściowych oraz
umiarkowanej częstotliwości sygnału pomiarowego człon 2 R 2 Ci2 w równaniu (H.6)
staje się pomijalnie mały względem jedności. Wobec relatywnie dużej wartości (10 F)
pojemności separującej można ją również zaniedbać w uproszczonym schemacie
127
zastępczym, w rezultacie czego układ równań obwodowych (H.1) i (H.2) sprowadza się do
postaci:
Ri
(H.9)
Vo1 Vi1
kVwzm
R Ri
Vo2 Vi 2 kVwzm
(H.10)
Jego rozwiązaniem jest przybliżona formuła określająca wartość rezystancji wejściowej
Vi 2
(H.11)
Ri R
Vi1 Vi 2
Formułą (H.11) można się posłużyć dla wyznaczenia rezystancji wejściowej
wzmacniacza prądowego charakteryzującego się niskimi wartościami Ri i Ci.
Bardzo prostą formułę obliczeniową można uzyskać w alternatywnej metodzie pomiaru wykorzystującej impulsowe własności obwodu wejściowego. W tej wersji w charakterze
sygnału pomiarowego stosuje się pobudzenie skokowe, a bezpośrednio mierzoną wielkością jest stała czasowa zaniku odpowiedzi. Zasadę tej metody, którą określić można mianem
metody impulsowej, ilustruje rysunek H3.
C1
P
kV wzm
CS
C2
Ci
Ri
Vi
V0
C
Rys. H3. Schemat układu do pomiaru impedancji wejściowej metodą impulsową
Dla uproszczenia zapisu oznaczmy symbolem C działającą na wejściu, wypadkową
pojemność szeregową (złożoną z pojemności separującej CS i „wtrącanej” pojemności zewnętrznej CZ)
CZ C
C
CZ
(H.12)
CZ CS CZ CS
Transmitancja obwodu wejściowego przybiera w tej notacji postać
Fatt ( p)
128
Zi
X C Zi
Ri /(1 pCi Ri )
1 / pC [ Ri /(1 pCi Ri )]
C
p
C Ci
1
p
C C i Ri
(H.13)
zaś odpowiedź na wymuszenie skokowe E H(t) w dziedzinie czasu opisuje równanie
Vo t E
C
t
exp
C
C
C Ci
i Ri
(H.14)
Dla dwóch różnych wartości CZ otrzymujemy na tej podstawie układ dwóch równań
1 C1 Ci Ri
oraz
2 C 2 Ci Ri
(H.15)
pozwalających obliczyć wartości wyznaczanych parametrów Ri i Ci.
Metoda powyższa rekomendowana jest dla wzmacniaczy napięciowych, gdy duże
wartości Ri dają nawet przy małych wartościach Ci łatwo mierzalne wartości stałych
czasowych.
Literatura
[1] Badźmirowski K., Kołodziejski J., Spiralski L., Stolarski E.: Miernictwo elementów
półprzewodnikowych i układów scalonych. Warszawa, WKiŁ 1983
[2] Spiralski L., Kołodziejski J.: Mikroelektronika. Miernictwo układów scalonych. Warszawa, WKiŁ 1977
129
DODATEK I
Ilustracje poglądowe modułów oraz zestawów ćwiczeniowych
Moduły ćwiczeniowe wykonano w dwu wersjach:
w formie pokazanej na rysunku I1 (wersja podstawowa),
w formie wkładek systemu aparaturowego „STANDARD”.
Rysunek I1 przedstawia rozwiązanie konstrukcyjne podstawowej wersji modułu ćwiczeniowego. Stanowiący przedmiot ćwiczenia układ (DUT), zmontowany na uniwersalnej
płytce montażowej, zamocowany jest między dwoma płytami osłaniającymi, związanymi
wzajemnie za pośrednictwem słupków dystansowych. Płyta dolna stanowi podstawę modułu, na górnej (czołowej) natomiast zamieszczono schemat ideowy badanego układu, a na
jego tle zamontowano gniazda umożliwiające elektryczny dostęp do wybranych węzłów
układu.
Rys. I1. Wersja podstawowa modułu ćwiczeniowego
Do budowy drugiej wersji modułów wykorzystano elementy konstrukcyjne systemu
aparaturowego STANDARD, a stosownie do potrzeb, badane układy wyposażono w uzupełniające obwody zasilania. W tej również wersji wykonano kilka niekonwencjonalnych
pomocniczych bloków aparaturowych. Rysunki I2, I3 oraz I4 podają przykładowe zestawy
ćwiczeniowe w konwencji systemu STANDARD.
W ćwiczeniu 15 (Liniowa bramka transmisyjna 1105) w charakterze modułu ćwiczeniowego wykorzystano oryginalny blok systemu CAMAC dostosowany do indywidualnej
pracy poza kasetą.
130
131
WY
GENERATORA
REGUL.
WIDMA
WY.GEN.
MODUŁ GSC+M
B
C
WY.MIESZ.
WE MIESZ.
A
P-1
E
B
D
C
FILTR ( CR-RC)
A
P-2
WY
WE
WE
CZWÓRNIK RC
C
Rys. I2. Zestaw aparaturowy do badania FILTRU QUASI-GAUSSOWSKIEGO - (Ćwiczenie 3)
WE IMP
WYOBS
MODUŁ GSB
R
WY
132
WE
+
WY.d.
WE
WE
Start
WY.d.
Stop
mode
WY.a.
WY.d.
WY.a.
WY
reset
Power
Gate time / multip. Seconds / Pulse
WE
ANALIZATOR A-21
WY-SONDA-ZASIL
POL. WY. SIEĆ
REG
ZAKRES
ZAKRES
iINTEGRATOR ILL21
INTEGRATOR
ILL21
WE 1
WN
WY
.
INTEGR.RÓŻNIC
WY WN
ZWN-21
Rys. I3. Zestaw ćwiczeniowy do badania STABILIZATORA SPEKTROMETRU – (Ćwiczenie 16)
P-41
.
WY.a
ANALIZATOR A-21
REG. WZMOCNIENIA
STAŁA CZASOWA
ZAS.WN.
WE 2
STER
ZAKRESY
WE
WE 2
SCALER / TIMER
WE
ANALIZATOR A-21
-
WZMACNIACZ LINIOWY WL-41
WE 2
133
WE
+
WY.
WIDMA
REGUL.
WY.GEN.
MODUŁ GSC+M
REG. WZMOCNIENIA
B
C
WY.MIESZ.
WE MIESZ.
A
STAŁA CZASOWA
WE
ANALIZATOR
A-21
ANALIZATOR
A-21
WY-SONDA-ZASIL
POL. WY. SIEĆ
WY.d.
WY.a.
WY
ZAKRES
ZAKRES
INTEGRATOR ILL21
INTEGRATOR ILL21
WE
WE
i
[GI-F]
TRIG WY-Br. WY-Sygn. WE
TBR
FILTR z INTEGR.BRAMK.
Rys. I4. Zestaw ćwiczeniowy do badania FILTRU NIESTACJONARNEGO - (Ćwiczenie 17)
WYOBS
WE IMP
MODUŁ GSB
-
WZMACNIACZ LINIOWY WL-41