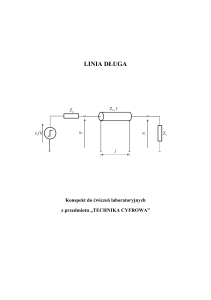
Linie długie.
1. Linie długą nazywamy linię za pomocą której przesyłamy energię prądów wielkiej
częstotliwości.
Kształtowanie impulsów w układach o stałych rozłożonych polega na wykorzystaniu
właściwości linii długich, tzn. takich elektrycznych linii dwuprzewodowych, w których
zarówno prąd, jak i napięcie są nie tylko funkcjami czasu ale i odległości
i = i (x,t)
u = u (x,t)
2. Parametry charakterystyczne linii długiej :
-
rezystancja jednostkowa R – iloraz łącznej rezystancji obu przewodów linii przez jej
długość
indukcyjność jednostkowa L – iloraz indukcyjności całkowitej obu przewodów linii
przez jej długość
pojemność jednostkowa C – iloraz pojemności między przewodami linii do jej
długości
upływność jednostkowa G – iloraz upływności między przewodami linii do jej
długości.
Impedancja falowa, zwana również impedancją charakterystyczną ZC
Lc
R j L
dla linii długiej ze stratami
G j C
L
dla linii długiej bez strat
C
Jeżeli impedancja obciążenia linii długiej Zobc=Zc to linia długa jest dopasowana
falowo. W takiej linii nie występują odbicia energii, a iloraz napięcia do prądu w
każdym punkcie linii jest równy impedancji falowej.
Impedancję falową linii długiej można również obliczyć, gdy znana jest impedancja
linii w stanie zwarcia Zz oraz w stanie jałowym Zo
Zc Z z Zo
ZC
-
Współczynnik przenoszenia, zwany również współczynnikiem propagacji lub
tamownością jednostkową
dla linii długiej ze stratami (1.1)
( R jL)(G jC) j
j LC j dla linii bez strat
gdzie:
- współczynnik tłumienia
( dla linii bez strat wynosi 0)
- współczynnik przesunięcia ( dla linii bez strat wynosi LC )
-
prędkość rozchodzenia się fali w linii długiej bez strat jest bliska prędkości światła
1
1
c
LC
r r
Wielkości , i ZC decydują o parametrach fal napięcia i prądu w linii długiej. Parametry
falowe , i ZC zależą od parametrów jednostkowych linii długiej czyli od R , L ,G , C oraz
od częstotliwości . Z zależności definicyjnej 1.1 wyznaczamy współczynniki tłumienia i
przesuwności :
1
( R 2 (L) 2 G 2 (C ) 2 RG 2 LC )
2
1
( R 2 (L) 2 G 2 (C ) 2 RG 2 LC )
2
0 RG
0 0
RC GL
2 LC
LC
przebieg stałych , w funkcji pulsacji
3. Schemat zastępczy linii długiej stratnej :
Równania linii długiej :
u
i
Ri L
x
t
i
u
Gu C
x
t
Rozwiązania tych równań :
2u
u
2u
(
RC
LG
)
RGu
0
t 2
t
x 2
2i
i
2i
LC 2 ( RC LG ) RGi 2 0
t
t
x
LC
dla linii bezstratnej R=G=0 równania przyjmują postać:
2u 2u
LC 2 2 0
t
x
2
i 2i
LC 2 2 0
t
x
są to równania fali płaskiej.
4. Rozpatrując następujący układ :
oraz wprowadzając oznaczenia :
Z Z0
g 1
współczynnik odbicia na wejściu linii
Z1 Z 0
Z Z0
L 2
współczynnik odbicia na wyjściu linii
Z2 Z0
=l/v opóźnienie linii – czyli czas potrzebny na przejście fali pierwotnej lub odbitej przez
całą jej długość
UWAGA:
W stanie ustalonym u1=u2
otrzymujemy wyrażenie na napięcie i prąd w linii :
x
s
l
_
u ( x, s ) E
g
( s)
x
s ( 2 )
l
Z0 e
Le
Z g Z 0 1 g L e 2 s
x
s
x
s ( 2 )
l
1
e l Le
(
x
,
s
)
E
(
s
)
g
i
Z g Z 0 1 g L e 2 s
_
które rozwijając w szereg geometryczny o ilorazie g Le 2 s można przedstawić w
postaci nieskończonej sumy :
-----------------------------------------------------------------------------------------------------x
x
x
x
_
s ( 2 )
s ( 2 )
Z0 s l
2 s ( 4 l )
l
l
(
x
,
s
)
E
(
s
)
e
e
e
e
...
g
L
g L
g L
u
Z g Z0
-----------------------------------------------------------------------------------------------------5.Wykresy Bergerona – metoda graficzna analizy stanów nieustalonych w linii
bezstratnej z obciążeniem rzeczywistym.
Za pomocą wykresów Bergerona można określić przebiegi prądu i napięcia na końcach
linii jak również w dowolnym jej punkcie. Ponadto możliwe jest analizowanie układu
pobudzanego napięciem eg(t) o dowolnym kształcie.
Zaletą metody graficznej jest możliwość uzyskania rozwiązania przy nieliniowym
charakterze obciążenia linii jak i nieliniowym charakterze źródła pobudzającego, a więc w
typowych warunkach pracy linii w układach wielkosygnałowych.
Przykład 1. ( z wykorzystaniem wykresów Bergerona)
Skok napięcia w chwili t=0 na początku linii wynosi
u1 (0 ) U M
Z0
Z 0 Rg
Fala napięciowa o amplitudzie u1 (0 ) (i prądowa i1 (0 ) ) wędruje ku obciążeniu. W chwili
t= następuje odbicie (mnożenie napięcia przez L ) oraz superpozycja fali padającej i odbitej.
Amplituda napięcia u2 w chwili tuż po odbiciu t= + wynosi :
RL Z 0
)
RL Z 0
W chwili t=2+ fala napięciowa o wartość u1(0+) L odbija się na wejściu i napięcie na
wejściu wynosi:
u 2 ( ) u1 (0 )(1 L ) u1 (0 )(1
u1 (2 ) u1 (0 )(1 L L g )
Przykład 2.
Dane :
R0 = 100 ; l/v=10s
Z2=300 ; Z1=60
e(t) ma kształt skoku o amplitudzie 64V
rys. do przykładu j.w.
Fale pierwotne napięcia i prądu obliczamy ze wzoru:
E ( s ) R0 1
E (s)
1
U 0 (s)
40 V
I 0 (s)
0,4 A
Z1 R0 s
Z1 R0 s
współczynniki odbicia :
g 0.25
L 0.5
Napięcie na początku linii określa wyrażenie :
u(0,t)=[1(t)40 + 1(t-20s)(20-5) + 1(t-40s)(-2,5+0,625) + ...] V
Napięcie na końcu linii :
u(l,t)=[1(t-10s)(40+20) + 1(t-30s)(-5-2,5) + 1(t-50s)(0,625+0,312) + ...] V
Napięcie w odległości 0,4l od jej początku :
u(0.4l,t)=[1(t-4s)40 + 1(t-16s)20 + 1(t-24s)(-5) + 1(t-36s)(-2,5) +1(t-44s)0,625 + ...] V
Wykresy do przykładu:
6. Kształt napięcia na końcach linii bezstratnej (pobudzanej skokiem
jednostkowym ze źródła o rezystancji wewnętrznej Z0) , obciążonej dwójnikami o charakterze
reaktancyjnym. Linia jest dopasowana na wejściu.
Przy obciążeniu reaktancyjnym pomocna jest metoda czoła i grzbietu, którą można
bezpośrednio zastosować dla dopasowania na wejściu (przy braku dopasowania jest ona
pomocna ale nie daje dokładnego rezultatu!!!).
Metoda „czoła i grzbietu” jest to metoda dzięki której można szybko i praktycznie bez
obliczeń określić odpowiedź większości układów na skok jednostkowy.
- W pierwszym kroku wyznaczamy
def
h(0) lim h(t )
t 0
tzn. amplitudę układu na czoło impulsu pobudzającego.
- następnie określamy asymptotyczną wartość
def
h() lim h(t )
t
tzn. odpowiedź układu w stanie ustalonym.
Obie te wartości można łatwo wyznaczyć, ponieważ dla czoła impulsu kondensatory mogą
być traktowane jako zwarcie, (indukcyjności jako rozwarcie), a dla grzbietu przy t
jako rozwarcie (indukcyjności jako zwarcie ).
- kolejnym krokiem jest wyznaczenie stałej czasowej , określającej szybkość zmian
napięć i prądów w układzie. Wartość wyznacza się , znajdując rezystancje obwodu
widzianą z zacisków elementu reaktancyjnego, przy zwartym wejściu (sterowanie
napięciowe) i rozwartym wyjściu (brak obciążenia)
Znając h(0) , h() , wyznaczamy odpowiedź jednostkową h(t)
t
h(t ) [h(0) h()]e h()
Rozpatrujemy 3 przykład z tabeli.
Od czasu t= następuje ładowanie kondensatora(dla t= C stanowi zwarcie) ze stałą czasową
(R||Z)C do wartości wynikającej z dzielnika Z i R (ponieważ dla t C stanowi rozwarcie).
7.Linie długie jako układ kształtujący impulsy.
Za pomocą linii długich można kształtować impulsy prostokątne o zadanym czasie trwania.
Zaletą tego sposobu kształtowania impulsów jest duża stabilność parametrów wytwarzanych
przebiegów, natomiast wadą stosunkowo duże wymiary układów, zwłaszcza w tych
przypadkach, gdy wymagany jest duży stosunek długości impulsu do czasu trwania zboczy.
Rozróżniamy trzy przypadki obciążenia :
1. Przypadek gdy RL = (linia rozwarta )
Współczynnik odbicia L 1 zatem upad=uodb i ipad=iodb
uL=2 upad
iL=0
a więc napięcie na końcu linii podwaja się po odbiciu, a prąd zanika do zera. Jest to
zjawisko pełnego odbicia fali bez zmiany znaku.
2. Przypadek gdy RL = 0 (linia zwarta )
Współczynnik odbicia L= -1. Fala odbija się ze zmianą znaku (upad=-uodb i ipad=-iodb )
Zatem uL=0
iL=2 ipad
a więc prąd na końcu zwartej linii podwaja się, a napięcie zanika do zera.
3. Przypadek gdy RL = R0 (linia dopasowana do obciążenia)
Współczynnik odbicia L=0, nie ma fali odbitej (uodb =0 iodb =0 ). W linii ustala się
stan stacjonarny.
Jeżeli rezystancja obciążenia jest skończona, nie ma dopasowania (RL R0) , wystąpi
częściowe odbicie fali. Możliwy jest przy tym dwojaki rodzaj niedopasowania.
Przy niedopasowaniu typu RL>RO fala odbita nie zmienia znaku (uL>upad ; iL<ipad ).
Przy niedopasowaniu typu RL<RO jest sytuacja odwrotna , fala odbija się ze zmianą znaku
wobec czego uL<upad ; iL > ipad.
Czwórniki dopasowujące
Bardzo często chcemy połączyć dwie linie długie o różnych impedancjach falowych tak aby
nie następowały odbicia (czyli aby linie były dopasowane). W tym calu używa się
specjalnych czwórników dopasowujących. Przykład takiego czwórnika przedstawia poniższy
rysunek:
Z1
Z2
R1
Z1
R2
Z1<Z2
Rezystancje R1 i R2 dobiera się w taki sposób aby rezystancja widziana od strony wyjścia linii
1 była równa Z1 czyli: Z1= R1 + (R2 || Z2), oraz rezystancja widziana od strony wejścia linii 2
była równa Z2, czyli: Z2= R2 || (R1 + Z1).
Współczynnik tłumienia powstały przez wprowadzenie czwórnika dopasowującego jest jak
następuje:
U 1wy R1 ( R2 || Z 2 )
V
dB 20 log V
U 2 we
R2 || Z 2