ĆWICZENIE NR
1
POMIAR CZASU I CZĘSTOTLIWOŚCI
18.1. Cel ćwiczenia
Celem ćwiczenia jest poznanie metod pomiaru czasu i częstotliwości oraz
możliwości zastosowania niektórych typów częstościomierzy i czasomierzy.
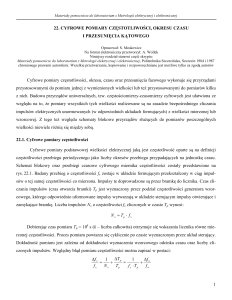
18.2. Podstawy teoretyczne pomiaru
Czas i częstotliwość to wielkości najczęściej mierzone zarówno w
badaniach naukowych i technice, jak i w życiu codziennym. Ze względu na ich
ziarnistą strukturę są one często wykorzystywane w cyfrowej technice
pomiarowej jako wielkości pośrednie przy pomiarach wielkości ciągłych (np.
przetworniki napięcie – częstotliwość U/f)
Istotną właściwością pomiarów będących przedmiotem ćwiczenia jest
możliwość korzystania z bardzo dokładnych wzorców tych wielkości, do
których zaliczamy atomowe rezonatory cezowe i powszechnie używane
rezonatory kwarcowe.
W roku 1967 przyjęto następującą definicję jednostki czasu:
„Sekunda jest to czas równy 9.192.631.770 okresów promieniowania,
odpowiadającemu przejściu między dwoma nadsubtelnymi poziomami stanu
podstawowego atomu cezu 133.”
Etalony czasu mają wyjątkową pozycję w metrologii, gdyż na tej samej
zasadzie co wzorce o najwyższej dokładności, tzn. wzorce pierwotne działają
również wzorce komercyjne (przenośne). Niedokładność pierwotnych,
cezowych wzorców częstotliwości wynosi 2 10 13 , a granice potencjalnych
możliwości oceniane są na 5 10 14 .
Powszechny dostęp do najdokładniejszych, laboratoryjnych, atomowych
wzorców częstotliwości jest możliwy dzięki propagacji częstotliwości
wzorcowej poprzez fale radiowe. Wiele laboratoriów czasu i częstotliwości
emituje drogą radiową sygnały wzorców częstotliwości. Do odbioru tych
sygnałów wykorzystywane są specjalizowane urządzenia odbiorcze.
W urządzeniach pomiarowych najczęściej stosowanym źródłem
częstotliwości wzorcowej jest rezonator kwarcowy. Względna, długotrwała
270
niestabilność częstotliwości (wyznaczona w odniesieniu do 30 dni) generatorów
kwarcowych osiąga wartość do 10-9.
18.2.1. Cyfrowy pomiar czasu
Do pomiaru interwału (przedziału) czasu stosuje się głównie metody
cyfrowe ze zliczaniem impulsów o częstotliwości wzorcowej. Podstawowym
blokiem czasomierza jest licznik elektroniczny. Czasomierz cyfrowy służy do
pomiaru odstępu czasu między dwoma impulsami elektrycznymi, z których
jeden rozpoczyna a drugi kończy zliczanie impulsów wzorcowych. Ogólny
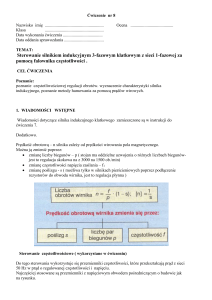
schemat blokowy cyfrowego miernika casu pokazano na rys. 18.1.
START
UKŁAD
STERUJĄCY
STOP
przepisz
WYŚWIETLACZ
tx
GENERATOR
WZORCA
fw
BRAMKA
LOGICZNA
zerowanie
fl
LICZNIK
Rys. 18.1. Schemat blokowy cyfrowego miernika czasu
Generator wzorca jest źródłem sygnału o częstotliwości wzorcowej fw
Wyście generatora połączone jest z wejściem bramki logicznej. Pomiar
rozpoczyna się w momencie, gdy na wejściu układu sterującego pojawia się
sygnał START, który zeruje licznik i otwiera bramkę co powoduje, że impulsy o
częstotliwości wzorcowej fw zliczane są w liczniku. Pomiar kończy impuls
STOP, który poprzez układ sterujący zamyka bramkę i odcina wejście licznika,
a następnie generuje sygnał przepisywania stanu wyjścia licznika do bufora
wyświetlacza. Jeśli licznik zliczył N impulsów, to przy częstotliwości
generatora wzorcowego fw zmierzony czas tx wyznacza zależność
tx
Nx
N x Twzorca
fw
(18.1)
Błąd systematyczny graniczny pomiaru czasu zgodnie ze znanymi zasadami
oblicza się ze wzoru
271
N f wzorca
N Twzorca
t x
tx
f wzorca
Twzorca
N
N
(18.2)
gdzie:
- błąd zliczania impulsów przez licznik,
N
Tw f w
- błąd generatora wzorca.
Tw
fw
txr
N
t
Tw
t1
Tw
w
t2
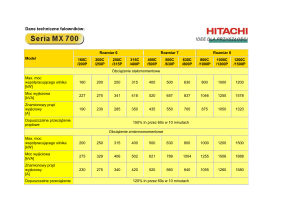
Rys. 18.2. Ilustracja mechanizmu powstawania błędu dyskretyzacji
Błąd zliczania impulsów przez licznik to błąd dyskretyzacji. Mechanizm
powstawania tego błędu ilustruje rys. 18.2. Przez czas otwarcia bramki tx
zliczane są imulsy wzorcowe fw co zgodnie z rys. 18.2 można zapisać
t x N 1Tw Tw Tw
(18.3)
gdzie:
0 11 i 0 1 - współczynniki określające przesunięcie między
chwilami otwarcia i zamknięcia bramki, a pierwszym i ostatnim impulsem
zegarowym.
Stosując metodę najgorszego przypadku, z zależności (18.1) i (18.3) można
wyznaczyć graniczne wartości błędu dyskretyzacji
t N 1)Tw
Gdy 0 to x
t x t x t xr Tw
(18.4)
272
t N 1Tw
Gdy 1 to x
t x t x t xr Tw
(18.5)
Zależnościami (18.4) i (18.5) widać, że czas wskazywany przez licznik
może być o jeden okres wzorca krótszy lub dłuższy od mierzonego. Jest to błąd
dyskretyzacji, który zgodnie z dotychczasowymi rozważaniami można opisać
następująco:
Błąd dyskretyzacji charakteryzuje przetwarzanie analogowo-cyfrowe
polegające na zliczaniu impulsów. Jest on związany z ograniczeniem liczby
stanów wyjściowego sygnału cyfrowego i powstaje na skutek braku
synchronizacji między momentami otwarcia i zamknięcia bramki logicznej, a
sygnałem częstotliwości wzorcowej. Błęd ten jest równy Tw .Wartość
względna błędu dyskretyzacji jest odwrotnie proporcjonalna do liczby
zliczonych impulsów N.
W skład całkowitego błędu czasomierza zliczającego wchodzi także błąd
wynikający z różnych opóźnień sygnałów sterujących na drodze od wejścia do
bramki. Jeżeli maksymalny błąd względny spowodowany opóźnieniami
oznaczymy top to całkowity błąd pomiaru czasu metodą cyfrową zgodnie ze
wzorem (18.2) określa wzór
1
f
gr t x w top
fw
N
(18.6)
Maksymalny, możliwy do pomierzenia w tym układzie przedział czasu
zależy od częstotliwości wzorcowej i pojemności zastosowanego licznika
t x max
N max
N max Tw
fw
(18.7)
gdzie:
Nmax – pojemność licznika.
Jeśli częstotliwość wzorca jest równa 10k Hz (k – liczba naturalna),
wówczas wynik pomiaru odczytuje się bezpośrednio w jednostkach czasu. W
273
rozwiązaniach praktycznych częstotliwość generatorów wzorcowych mieści się
w przedziale od 100 kHz do 100 MHz.
Poza opisanym podstawowym układem czasomierza cyfrowego stosowane
są układy o bardziej złożonej strukturze np. czasomierz z noniuszem do pomiaru
krótkich czasów.
18.3.3. Cyfrowy pomiar częstotliwości
Wyróżnia się dwie metody cyfrowego pomiaru częstotliwości: metodę
bezpośrednią i metodę pośrednią.
Metoda bezpośrednia polega na zliczaniu impulsów o mierzonej
częstotliwości fx we wzorcowym przedziale czasu Tw .Jeśli Tw=10ks (k – liczba
całkowita), to wynik wyrażony jest bezpośrednio w jednostkach częstotliwości.
W metodzie pośredniej zliczane są impulsy z generatora wzorca o
częstotliwości fw w czasie trwania pojedynczego okresu Tx badanego przebiegu.
Pomiar częstotliwości zostaje zastąpiony pomiarem okresu, z którego pośrednio
wyznacza się częstotliwość.
Sx
Sw/k
UKŁAD
STERUJĄCY
WEJŚCIOWY
UKŁAD
FORMUJĄCY
Sx
GENERATOR
WZORCA
Sw
DZIELNIK
CZĘSTOTLIWOŚCI
WZORCA (:k)
przepisywanie
WYŚWIETLACZ
Sf
zerowanie
BRAMKA
LOGICZNA
Sl
LICZNIK
BINARNY
Sw/k
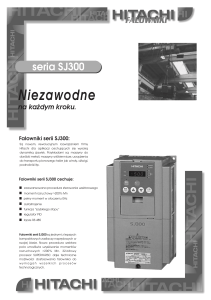
Rys. 18.3. Schemat blokowy układu czasomierza – częstościomierza.
Najczęściej konstruuje się mierniki, które mierzą zarówno częstotliwość jak
i okres (czas). Schemat blokowy cyfrowego częstościomierza – czasomierza
przedstawiono na rys. 18.3, a jego podstawowe bloki to:
Wejściowy układ formujący, którego zadaniem jest takie ukształtowanie
sygnału wejściowego, aby jego poziom był zgodny z zastosowanymi układami
cyfrowymi (układy TTL, CMOS itd.). Przykładem układu mogącego pełnić rolę
274
wejściowego układu formującego jest komparator w układzie detektora zera,
który pełni rolę interfejsu między częścią analogową i cyfrową układu.
Generator wzorca i nastawny dzielnik częstotliwości, które stanowią źródło
wzorcowego sygnału sterującego bramką logiczną. Wybór współczynnika
podziału dzielnika decyduje o wyborze podzakresu miernika.
Bramka logiczna i licznik stanowią część cyfrową układu. Wybór układów
zależy od przyjętej logiki i funkcji logicznej. Istotą tego bloku jest fakt, że
licznik zlicza impulsy, które pojawiają się na jego wejściu, gdy zachodzi
określona relacja logiczna między sygnałami wejściowymi bramki.
Logiczny układ sterujący pełni funkcję generatora sygnałów sterujących.
Sygnały zerowania licznika oraz przepisywania stanu licznika do bufora
wyświetlacza są generowane zgodnie ze stanami logicznymi sygnałów
wyjściowych układu formującego i dzielnika częstotliwości.
Dla ilustracji zasady działania częstościomierza – czasomierza na rys. 18.4,
pokazano przebiegi czasowe sygnałów w charakterystycznych punktach tego
układu.
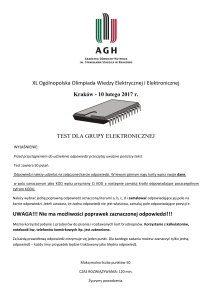
Rys 18.4a dotyczy bezpośredniego pomiaru częstotliwości, natomiast rys.
18.4b, tego rysunku, to przebiegi pojawiające się w układzie, gdy mierzony jest
okres (pośredni pomiar częstotliwości). Jak widać na rys. 18.4a, wejściowy
sygnał sinusoidalny Sx o mierzonej częstotliwości fx jest przetworzony w ciąg
odpowiednich impulsów Sf . Impulsy te podane są na jedno z wejść bramki
logicznej. Do drugiego wejścia bramki dołączony jest sygnał Sw/k. Zależnie od
ustawionego ręcznie lub automatycznie współczynnika podziału, drugi z
wejściowych sygnałów bramki stanowi krotność okresu generatora wzorca i
wynosi kTw .Czas ten stanowi o tym,ile impulsów o mierzonej częstotliwości
zostanie zliczonych przez licznik.
Można zapisać:
NT x kTw
(18.8)
skąd:
fx
fw
N
N
k
kTw
(18.9)
275
a)Bezpośredni pomiar częstotliwości
Sx
t
Sf
t
Tx
Sw/k
t
Tb
t
b)Pośredni pomiar częstotliwości
Sx
Sf
t
Tb
t
Tx
Sw
Tw
kTw
Sl
t
t
Sl
t
t
Rys. 18.4. Przebiegi czasowe sygnałów czasomierza
Oznaczenia sygnałów jak na rysunku 18.3. Tbramki oznacza czas otwarcia bramki i dla pomiaru
bezpośredniego jest równy kTwzorca, a dla pomiaru posredniego jest równy okresowi badanego
przebiegu Tx.
Błąd pomiaru można opisać wzorem
f x 1 Tw
to
fx N
Tw
(18.10)
gdzie poszczególne składniki są takie jak we wzorze (18.2).
W praktyce czas pomiaru kTw zawiera się w przedziale od 1 ms do 10 s.
Nadmierne wydłużenie tego czasu jest niecelowe, gdyż przy zmianach
częstotliwości badanego sygnału, wynik pomiaru będzie wartością średnią. Czas
zliczania impulsów kTw jest okresem uśredniania cyfrowego.
Górna granica częstotliwości mierzonej bezpośrednio wynika z
częstotliwości granicznej licznika, która wynosi ok. 250 MHz. Istnieją specjalne
techniki i rozwiązania układowe pozwalające na rozszerzenie górnej granicy
pomiaru częstotliwości metodą zliczania impulsów.
Przy pomiarach małych częstotliwości liczba zliczonych impulsów jest
mała, a więc rośnie względny błąd dyskretyzacji. W tej sytuacji dla
zmniejszenia tego błędu, celowym jest zastosowanie pomiaru pośredniego
276
poprzez pomiar okresu. Na rys. 18.4b przedstawiono przebiegi czasowe
sygnałów w układzie do pomiaru okresu. Przebieg o mierzonym okresie po
przetworzeniu w wejściowym układzie formującym doprowadzony jest do
układu bramki logicznej, którą otwiera na czas Tx. W czasie otwarcia bramki,
licznik zliczy N impulsów o okresie Tw. Zatem NTw=Tx, stąd
N
Tx
Tw
(18.11)
Błąd pomiaru można określić w sposób analogiczny do błędu pomiaru czasu
(wzór 18.2).
Dla pomiaru okresu bądź częstotliwości sygnału badanego należy wybrać tę
z metod, która da wynik obarczony mniejszym błędem. Wyboru właściwej
metody można dokonać z następującym rozumowaniem. Niech fw oznacza
częstotliwość generatora wzorcowego, a fx jest częstotliwością badanego
sygnału. Przy pomiarze pośrednim liczba zliczonych przez licznik impulsów
generatora wzorcowego wynosi
Np
fw
fx
(18.12)
Przy pomiarze częstotliwości z czasem otwarcia bramki równym kTw , gdzie
k to współczynnik podziału częstotliwości wzorcowej, liczba impulsów
zliczonych przez licznik jest równa
Nb
k
fw
(18.13)
Częstotliwość graniczną fo, dla której błędy dyskretyzacji obu metod są
sobie równe (Np=Nb), można wyliczyć z następującego wzoru
fo
1
k
fw
(18.14)
Dla uzyskania wyniku pomiaru obarczonego najmniejszym błędem, sygnał
o częstotliwości mniejszej od częstotliwości fo należy pomierzyć metodą
pośrednią, a sygnały o częstotliwości większej niż fo należy badać metodą
277
bezpośrednią. Dla częstotliwości fo błąd dyskretyzacji dla obu metod jest
1
jednakowy i wynosi
.
k
18.2.3. Częstościomierze niecyfrowe
W zależności od wartości mierzonej częstotliwości, kształtu i rodzaju
sygnału badanego oraz wymaganej dokładności pomiaru stosuje się
częstościomierze pracujące według różnych zasad są one stosowane głównie do
pomiaru częstotliwości w urządzeniach technicznych.
Częstościomierze ilorazowe
Ilorazowe mierniki ferrodynamiczne i magnetoelektryczne stosowane są do
pomiarów częstotliwości technicznych. Odchylanie organu ruchomego
przetwornika ilorazowego jest funkcją ilorazu dwóch prądów. Jeżeli jeden z
prądów lub obydwa uzależni się od częstotliwości, to odchylenie organu
ruchomego przetwornika ilorazowego będzie funkcją częstotliwości.
Na
rys.
18.5.
przedstawiono
schemat
częstościomierza
magnetoelektrycznego. Wartość prądu I1 zależy tylko od napięcia U, natomiast
prąd I2 zalezy dodatkowo od częstotliwości, gdyż w obwodzie tej cewki
włączony jest dławik L.
I2
I1
R
R
U
D
D
D
R
L
D
Rys. 18.5. Układ częstościomierza magnetoelektrycznego
Ponieważ odchylenie organu ruchomego przetwornika ilorazowego jest
funkcją ilorazu prądów I1/I2, zatem
278
L
R
F1 F ( f )
(18.15)
gdzie;
- odchylenie organu ruchomego miernika,
i f – odpowiednio mierzona pulsacja i częstotliwość,
L – indukcyjność dławika włączonego w obwód drugiej cewki miernika,
R – rezystancja w obwodzie pierwszej cewki.
Górna granica
zakresu częstościomierzy ilorazowych zależy od
zastosowanego przetwornika i wynosi kilkaset herców, a błąd pomiaru jest
większy od 1%. Mierniki te stosowane są np. w energetyce do pomiaru
częstotliwości sieci.
Częstościomierz integracyjny
Zasada
działania
częstościomierza
integracyjnego
polega
na
przeładowywaniu kondensatora z częstotliwością mierzoną i pomiarze prądu
ładowania i rozładowania kondensatora. Układ i przebiegi czasowe sygnałów
częstościomierza integracyjnego przedstawiono na rys. 18.6.
ux(t)
t
C
ux(t)
UKŁAD
WEJŚCIA
Uc
e(t)
D1 i(t)
e(t)
E
t
D2
uc(t)
t
i(t)
t
Rys. 18.6. Układ i przebiegi czasowe integracyjnego częstościomierza elektronicznego
279
W układzie wejściowym częstościomierza, napięcie o częstotliwości mierzonej
jest przetwarzane w napięcie prostokątne o takiej samej częstotliwości i
amplitudzie równej E. Kondensator C jest przeładowywany napięciem od –E do
+E i przeciwnie.
Różnica ładunków pojedynczego ładowania i rozładowania, która
przepływa przez miernik prądu – mikroamperomierz, jest równa q 2CE.
Ponieważ, przeładowywanie następuje f razy w ciągu sekundy, więc prąd
płynący przez mikroamperomierz wynosi
I C E f
(18.16)
gdzie:
C – pojemność kondensatora,
E – amplituda przebiegu prostokątnego,
fx– mierzona częstotliwość.
Dokładność częstościomierza integracyjnego zależy od stałości amplitudy
napięcia prostokątnego. Zależnie od rodzaju układu formującego, błąd
częstościomierzy integracyjnych mieści się w granicach od 0,2% do 3%.
18.3. Wykonanie ćwiczenia
18.3.1. Wyznaczenie charakterystyk błędu częstościomierza
Zgodnie z instrukcją obsługi sprawdzić poprawność działania
częstościomierza-czasomierza. Sprawdzenie polega na pomiarze częstotliwości
wzorcowych, generowanych przez układ wewnętrzny miernika.
Układ połączeń
GENERATOR
MIERNIK
CZĘSTOTLIWOŚCI
Rys. 18.7. Schemat układu pomiarowego
Postępowanie podczas pomiaru
Podstawowym przyrządem pomiarowym używanym w ćwiczeniu jest
cyfrowy częstościomierz – czasomierz. Przed przystąpieniem do wykonywania
280
pomiarów należy zapoznać się z instrukcją obsługi tego przyrządu oraz spisać te
dane, które będą niezbędne do opracowania wyników pomiaru.
Wejście pomiarowe miernika połączyć z wyjściem generatora fali prostokątnej.
Następnie na generatorze nastawić częstotliwość równą 1Hz i zmierzyć jej
wartość za pomocą częstościomierza, stosując metodę bezpośrednią i pośrednią.
Pomiary wykonać przy wszystkich nastawach częstościomierza podanych w
tabeli 18.1 i 18.2. Wyniki pomiarów wpisać do odpowiednich kolumn tabel.
Następnie należy nastawić kolejną wartość częstotliwości generatora, zgodnie z
programem ćwiczenia i postępować jak uprzednio. Wyniki pomiarów wpisać do
tabeli 18.1 i 18.2.
Protokół wyników pomiaru
Pomiar częstotliwości metodą bezpośrednią
Tabela 18.1
Czas trwania
bramki
10s
1s
1
Hz
NASTAWA GENERATORA
10
100
1
10
100
Hz
Hz
kHz kHz kHz
1
MHz
`
Wskazania
miernika
Błąd wskazania
Wskazanie
miernika
Błąd wskazania
100 ms
Wskazanie
miernika
Błąd wskazania
10ms
Wskazanie
miernika
Błąd wskazania
281
Pomiar częstotliwości metodą pośrednią
Tabela 18.2
Częstotliwość
wzorca
1
Hz
NASTAWA GENERATORA
10
100
1
10
100
Hz
Hz
kHz kHz kHz
1
MHz
`
Wskazania
miernika T[ms]
Wartość
przeliczona f[kHz]
Błąd wskazania
[%]
Wskazanie
miernika T[ms]
Wartość
przeliczona f[kHz]
Błąd wskazania
[%]
Wskazania
miernika T[ms]
Wartość
przeliczona f[kHz]
Błąd wskazania
10 kHz
100 kHz
1 MHz
Wskazania
miernika T[ms]
Wartość
przeliczona f[kHz]
Błąd wskazania
[%]
10 MHz
Wzory i przykłady obliczeń
Dla pomiaru bezpośredniego (tabela 18.1) bezwzględny błąd wskazania
określa się jako różnicę między wartością zmierzoną a wartością poprawną,
którą przyjmuje się równą wartości nastawionej na generatorze
b%
f x f nast
100
f nast
(18.17)
Dla pomiaru pośredniego, tabela 18.2, błąd wskazania oblicza się ze wzoru
282
p%
f przel. f nast
f nast
100
(18.18)
w którym:
fprzel. – wartość częstotliwości obliczona ze wskazań miernika,
fnast – wartość częstotliwości nastawionej na generatorze.
Wykresy
Dla pomiaru bezpośredniego i pośredniego, wykreślić oddzielnie dla każdej
metody we wspólnym układzie współrzędnych charakterystyki błędu wskazania
w funkcji b f1 ( f ) f const , i p f 2 ( f w ) f
.
wconst.
18.3.2. Pomiar częstotliwości sieci zasilającej
Postępowanie podczas pomiaru
Do odpowiedniego wejścia częstościomierza dołączyć napięcie o
częstotliwości sieciowej i wartości dostosowanej do dopuszczalnej wartości
napięcia pomiarowego.
Wykonać 30 pomiarów, dobierając taki czas pomiaru (czas otwarcia
bramki), aby błąd wskazania był jak najmniejszy.
Na płycie czołowej miernika ustawić regulator „czas odczytu tak, aby było
możliwe notowanie kolejnych wskazań miernika ze stałym czasem repetycji
pomiarów.
Wyniki pomiarów zanotować w tabeli 18.3.
Protokół wyników pomiaru
Lp
fx[Hz]
1
2
Tabela 18.3
...............................
30
Wzory i przykłady obliczeń
Dla otrzymanych wyników pomiaru częstotliwości obliczyć wartość średnią
i odchylenie standardowe, a następnie obliczyć niepewności typu A.
283
Korzystając ze wzorów podanych w instrukcji miernika obliczyć błąd graniczny
i przyjmując równomierny rozkład błędów, wyznaczyć niepewność typu B.
Obliczyć niepewność całkowitą, przy współczynniku rozszerzenia równym 2.
Podać przykład obliczeń.
18.3.3. Pomiar czasu
Postępowanie podczas pomiaru
Do wejścia pomiarowego miernika, który zgodnie z instrukcją obsługi służy
do pomiaru czasu, dołączyć sygnał prostokątny z generatora o regulowanym
współczynniku wypełnienia. Współczynnik wypełnienia jest parametrem
charakteryzującym okresowe przebiegi impulsowe. Pomiar tego współczynnika
sprowadza się do pomiaru odpowiednich przedziałów czasu (rys. 18.8).
U
t2
t1
t
T
Rys. 18.8. Przebieg prostokątny i jego charakterystyczne odcinki czasu
Współczynnik wypełnienia określa zależność
a
t1
t
1
T t1 t 2
(18.19)
Miernikiem, częstościomierzem-czasomierzem należy zmierzyć czas
trwania impulsu ujemnego t2 i czas trwania impulsu dodatniego t1 oraz okres T.
Pomiar wykonać dla 100Hz dla różnych nastaw regulatora wypełnienia sygnału
generatora.
Wyniki pomiarów wpisać do tabeli 18.4.
284
Protokół wyników pomiaru
Lp
T
ms
t1
ms
t2
Tp=t1+t2
ms
ms
a
t1
T
ap
-
t1
-
Tabela 18.4
c
Tp
-
Wzory i przykłady obliczeń
Obliczyć niepewność całkowitą wyznaczania współczynnika a, typu A i
przyjąć rozkład równomierny błędów przyrządu. Podać przykład obliczeń.
Przyjąć współczynnik rozszerzenia równy 3.
Uwaga: opisać stosowaną aparaturę pomiarową i podać wartości
charakteryzujące jej właściwości.
18.4. Uwagi o wynikach pomiaru
18.5. Literatura
[1]
[2]
[3]
Kartaschoff P.: Częstotliwość i czas. WKiŁ, Warszawa 1985.
Oliver B.M., Cage J.M.: Pomiary i przyrządy elektroniczne. WkiŁ,
Warszawa 1978.
Syndenham P.H.: Podręcznik metrologii T.1. WNT,Warszawa 1988.