Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
Obsługa i programowanie przemiennika częstotliwości
LS Industrial Systems serii iC5
do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
Instrukcja do ćwiczenia laboratoryjnego
Jarosław Guziński
Katedra Automatyki Napędu Elektrycznego WEiA
Politechnika Gdańska 2014
wersja 2.3
Uwaga: przed laboratorium należy zapoznać się z dokumentacją przemiennika
częstotliwości iC5 oraz dokumentacją programu Drive View 3.3:
1. Instrukcja obsługi przemiennika częstotliwości LG serii iC5, LG Industrial Systems /
LS Industrial System.
2. Instrukcja obsługi: Drive View Users Manual, LS Industrial System.
Dokumentacje dostępne sa w postaci plików PDF na stronie WWW laboratorium
1. Cel ćwiczenia
Celem ćwiczenia jest zapoznanie z obsługą programowaniem i działaniem
przemysłowych przemienników częstotliwości w zastosowaniu do napędu samobieżnego
małego pojazdu elektrycznego.
2. Opis ruchu pojazdu dwusilnikowego
Napędy pojazd można podzielić na pojazdy z kierownicą oraz pojazdy sterowane
różnicą kół. W pojazdach z kierownica stosuje się najczęściej jeden silnik napędzający koła
pojazdu przez mechanizm różnicowy. Pojazdy, w których kierunek jazdy sterowany jest
różnicą prędkości kół, są pozbawione kierownicy.
Sterowanie różnica prędkości kół wykorzystuje się w napędach jezdnych suwnic,
napędach robotów oraz małych pojazdów elektrycznych np. wózków inwalidzkich.
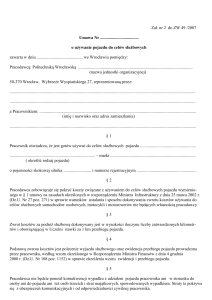
W pojeździe, którego kierunek jazdy realizowany jest przez zmianę prędkości kół
napędowych prędkość liniowa jest średnią prędkości obu kół:
v vP
vśr L
(1)
2
Różna prędkość silników napędzających koła powoduje jazdę pojazdu po łuku o
promieniu R. Pokazano to na rys. 1.
Zmiana kata skrętu zależy od różnicy prędkości kół;
v vL vP
(2)
Średnią prędkość pojazdu można opisać również zależnością:
r
vśr k L P
(3)
2
gdzie rk jest promieniem koła, natomiast L i P sa prędkościami Katowymi odpowiednio
lewego i prawego koła.
Średnia prędkość Katowa pojazdu można opisana jest zależnością:
r
śr k L P
(4)
l
gdzie l to rozstaw osi pojazdu.
1
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
Rys. 1. Ruch pojazdu po łuku
Promień skrętu pojazdu można określić na podstawie zależności wiążącej ruch liniowy i
obrotowy:
v
R śr
(5)
śr
Po uwzględnieniu (3) i (4) otrzymuje się zależność na promień skrętu pojazdu:
l L P
R
(6)
2 L P
Gdy prędkości obu kół są równe to promień skrętu dąży do nieskończoności. Oznacza
to, że pojazd porusza się prostoliniowo.
Przy założeniu, że koła napędzane są bezpośrednio, tj. bez użycia przekładni, zastępcze
momenty bezwładności sprowadzone na wał każdego z silników napędowych można opisać
następująco:
m p rk2
J zL J zP J s
Jk
(6)
2
gdzie Js jest momentem bezwładności silnika, mp jest masa pojazdu oraz J k jest momentem
bezwładności koła.
2
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
3. Układ sterowania pojazdem dwusilnikowym
Pojazd elektryczny może pracować w otwartym lub zamkniętym układzie regulacji z
zadawaniem prędkości lub momentu napędowego.
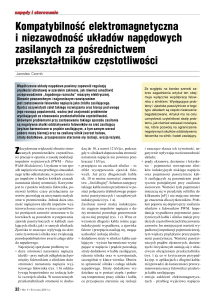
Na rys. 2 pokazano otwarty układ regulacji z zadawaniem prędkości.
Rys. 2. Otwarta struktura sterowania pojazdu dwusilnikowego z zadawaniem prędkości
(symbol * oznacza wielkość zadaną)
W strukturze sterowania z rys. 2 każdy z silników pracuje we własnej pętli regulacji
prędkości L oraz P. Dla każdej z tych niezależnych struktur zadawane są prędkości L *
oraz P*. Sygnał * jest wspólnym sygnałem zadanym prędkości natomiast * jest sygnałem
różnicy prędkości odpowiadającym kierunku jazdy.
Struktura otwarta jest wrażliwa na zakłócenia związane z nierównomiernym
obciążeniem kół pojazdu. Zakłócenia oddziaływają niekorzystnie na tor jazdy pojazdu.
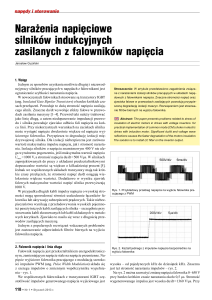
Korekta zakłóceń jest możliwa po zastosowaniu zewnętrznej pętli sprzężenia zwrotnego przez
wprowadzenie różnicowego regulatora prędkości – regulatora skrętu. Taka strukturę
sterowania pokazano na rys. 3.
3
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
Rys. 3. Struktura sterowania pojazdu dwusilnikowego z zadawaniem prędkości z
zastosowaniem regulatora skrętu
W układzie sterowania z rys. 3 uzyskuje się pełna kompensację zakłóceń. Zmiana
obciążenia dowolnego z kół, która wywołuje chwilową zmianę obciążenia powoduje reakcję
regulatora skrętu i odpowiednią zmianę sygnału wyjściowego u.
W większości pojazdów naturalnym sposobem pracy jest zadawanie momentu
napędowego a nie prędkości. Przy zadawaniu momentu prędkość pojazdu jest uzależniona od
aktualnego obciążenia. Kierujący pojazdem decyduje jak zmienić zadany moment aby
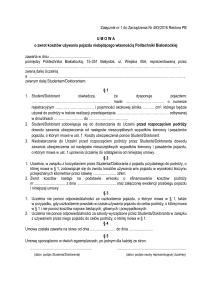
uzyskać pożądaną prędkość. Strukturę zamkniętego układu regulacji z zadawaniem momentu
napędowego przedstawiono na rys. 4.
4
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
Rys. 4. Struktura sterowania pojazdu dwusilnikowego z zadawaniem prędkości z
zastosowaniem regulatora skrętu
W strukturze z zadawaniem momentu oba silniki pracują w wewnętrznej pętli regulacji
momentu. Nadrzędny regulator koryguje zadane wartości momentu poszczególnych silników
ML* oraz MP* wprowadzając sygnał sterujący u.
Działanie układu regulacji z rys. 4 najwygodniej jest przeanalizować dla przypadku
zadanej jazdy na wprost. Wtedy zadany sygnał skrętu * =0 i jeśli aktualne prędkości kół są
identyczne to u=0 a zadane momenty są sobie równe ML*=MP*=M*. Chwilowa zmiana
prędkości jednego z kół, w wyniku nierównomiernego obciążenia, spowoduje wykrycie
różnicy prędkości przez regulator skrętu, co spowoduje wystąpienie niezerowego sygnału
u0 i nierówność zadawanych momentów ML*MP*M*. Zostanie zwiększony moment
silnika, którego prędkość spadła a zmniejszony moment silnika, którego prędkość jest
większa. Układ będzie dążył do wyrównania prędkości.
4. Dobór hamulca mechanicznego
W wielu napędach elektrycznych stosowane są hamulce mechaniczne, w których
moment hamujący powstaje pod wpływem sił tarcia. Hamulce mechaniczne stosowane są w
elektrycznych napędach dźwignicowych oraz trakcyjnych.
Ze względu na pełniona funkcję stosowane są:
hamulce awaryjne (bezpieczeństwa) – działające w przypadku awarii służące do
szybkiego zatrzymania mechanizmów, np. po przekroczeniu bezpiecznej
prędkości, przejechania poza ogranicznik końca jazdy, czy też świadomych
manipulacji maszynisty.
5
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
hamulce manewrowe (operacyjne) – do zatrzymania mechanizmów i utrzymania
ich w stanie zahamowanym.
Ze względu na sposób budowy można wyróżnić hamulce mechaniczne: klockowe
(szczękowe), taśmowe i tarczowe.
W większości przypadków hamulce mechaniczne w układach napędowych pozostają
normalnie zamknięte tj. zaciśnięte. Zapewnia to na trwałe zatrzymanie układu napędowego
przy braku zasilania elektrycznego.
Hamulce sterowane są elektrycznie za pomocą zwalniaków elektromagnetycznych lub
elektrohydraulicznych. Na rys. 5 pokazano układ hamulca szczękowego ze zwalniakiem
elektromagnetycznym.
Rys. 5. Hamulec szczękowy ze zwalniakiem elektromagnetycznym
Spotykane są zwalniaki na prąd stały i na prąd zmienny jedno- i trójfazowy. Zwalniak
elektromagnetyczny na prąd stały jest to cylindryczny elektromagnes przyciągający metalowy
rdzeń, który łączony jest z odpowiednią dźwignią hamulca mechanicznego. Widok zwalniaka
na prąd stały pokazano na rys. 6.
Jarzmo
Cewka
Ruchomy rdzeń
Rys. 6. Zwalniak na prąd stały
6
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
Przy prądzie przemiennym zwalniak ma budowę transformatora z rdzeniem
podzielonym na część nieruchomą, z osadzonymi na niej cewką lub cewkami, i częśc
ruchomą, połączoną przegubowo z dźwignią hamulca.
Dobór hamulca mechanicznego polega na wyznaczeniu momentu hamującego
potrzebnego do zatrzymania mechanizmu roboczego w założonym czasie. W przypadku
pojazdu elektrycznego o masie mp w celu wyznaczenia momentu hamującego należy obliczyć
energię kinetyczną Ek pojazdu podczas ruchu z prędkością maksymalną Vk:
2
m p * Vk
Ek
(1)
2
następnie należy założyć długość drogi hamowania s h i wyznaczyć czas hamowania:
2 * sh
th
(2)
Vk
oraz średnie opóźnienie:
V
ah k
(3)
th
Następnie należy określić moc traconą na kołach:
E
Ptr k
(4)
th
W przypadku pojazdu z dwoma hamulcami moc tracona w hamulcu jednego z kół wynosi:
P
Ptr 1 tr
(5)
2
Moment hamujący dla jednego koła wynosi:
P
M h1 tr1
(6)
k
gdzie k jest prędkością obrotową koła o średnicy D:
V
k tk
(7)
D
2
Ze względów bezpieczeństwa należy wybrać hamulec o przynajmniej o 50% większym
momencie hamującym:
M hk k M h1
(8)
gdzie k jest współczynnikiem przeciążalności k=1,5.
W karcie katalogowej hamulców należy poszukiwać hamulca o momencie hamującym
spełniającym warunek (8). Prędkość obrotowa hamulca musi mieścić się w zakresie prędkości
podanych w karcie katalogowej.
5. Stanowisko laboratoryjne
Widok stanowiska laboratoryjnego pokazano na rys. 7.
7
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
Rys. 7. Pojazd elektryczny z dwusilnikowym napędem z maszynami indukcyjnymi
Strukturę pojazdu przedstawiono na rys. 8.
DC
M
3
AC
Jazda do przodu
US
DC
M
3
AC
Rys. 8. Struktura układu napędowego pojazdu
Podstawowe dane pojazdu przedstawiono w tab. 1.
Tabela 1. Dane trójkołowego pojazdu elektrycznego
Masa
Prędkość maksymalna
Średnica koła
Rozstaw osi przy jeździe do przodu
Rozstaw osi przy jeździe do tyłu
Napięcie baterii akumulatorów
Pojemność baterii akumulatorów
Czas jazdy z maksymalną prędkością
m
Vk
Dk
lprzód
ltył
Uak
Qak
t
160 kg
60 km/godz.
0,44 m
0.8 m
1.2 m
300 V
5 Ah
15 min
8
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
Wykorzystywany w ćwiczeniu pojazd jest trójkołowcem z dwoma przednimi kołami
napędowymi. Trzecie, tylne kołem może się swobodnie skręcać. Takie rozwiązanie pozwala
na eliminacje skomplikowanego układu kierowniczego. Rozwiązanie konstrukcyjne
umocowania koła biernego jest takie, że w zależności od kierunku jazdy zmienia się rozstaw
osi, co zaznaczono w tab. 1.
Dwa elektryczne silniki indukcyjne napędzają bezpośrednio koła przednie bez użycia
przekładni mechanicznych. Główny układ sterowania zadaje prędkości obrotowe
poszczególnych silników. Różnica prędkości decyduje o kierunku jazdy.
W pojeździe zastosowano trójfazowe silniki indukcyjne produkcji firmy TAMEL typu
Sg 100L-6, dane silników przedstawiono w tab. 2.
Tabela 2. Dane silnika indukcyjnego Sg 100L-6
Moc znamionowa
Napięcie znamionowe
międzyfazowe
Połączenie uzwojeń stojana
Prąd znamionowy
Częstotliwość znamionowa
Liczba par biegunów
Prędkość znamionowa
Współczynnik mocy
znamionowy
Pn
2,2 kW
Un
300 V
Y – połączenie w gwiazdę
In
7,6 A
fn
50 Hz
p
3
nn
940 obr/min
0,73
cos n
Widok jednego z silników przedstawiono na rys. 9.
Rys. 9. Widok silnika indukcyjnego Sg 100L-6
Do zasilania silników zastosowano przemienniki częstotliwości LS Industrial Systems
typu Starvert SV-iC5 015-1F. Podstawowe dane techniczne przedstawia tab. 3.
Tabela 3. Podstawowe dane techniczne przemiennika częstotliwości LS typ SV-iC5 015-1F
Typ
Moc silnika
Dane
znamionowe
SV-iC5 015-1F
kW (KM)
Moc [kVA]
Prąd [A]
1,5 (2)
3,0
8
9
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
wyjściowe
Częstotliwość [Hz]
Napięcie [V]
Napięcie [V]
Dane znamionowe
Częstotliwość [Hz]
wejściowe
Prąd wejściowy [A]
Waga [kg]
0.1~400
3-fazowe 3x230
1-fazowe 200~230
50 ~ 60
16
1,9
Widok zewnętrzny przedstawia rys. 10.
Rys. 10. Widok przemiennika częstotliwości LS
Każdy z silników połączony jest z silnikiem tarczowym, którego zadaniem jest awaryjne
zatrzymanie pojazdu. Zastosowane hamulce sterowane są elektrycznie firmy FUMOOstrzeszów typ VET-32.25HLT-28-24. Z uwagi na sposób pracy są to luzowniki. W
luzownikach przy braku zasilania elektrycznego hamulec jest zaciśnięty, w celu zwolnienia
hamulca konieczne jest załączenie napięcia. Dane hamulców przedstawiono w tab. 4.
Tabela 4. Dane hamulca/luzownika VET-32.25HLT-28-24
Wielkość mechaniczna
Moment hamujący
Napięcie zasilania
Moc cewki
Średnica otworu na wałek
Nm
V
W
mm
32
25
24 (napięcie stałe)
37
28
Widok ogólny hamulca/luzownika przedstawia rys. 11.
10
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
Rys. 11. Widok hamulca/luzownika
6. Przemiennik częstotliwości iC5
Przemiennik częstotliwości serii iC5 jest układem energoelektronicznym składającym
się z niesterowanego, jednofazowego prostownika diodowego, oraz trójfazowego falownika
napięcia. Przekształtnik zasilany może być jednofazowo napięciem 230 V, 50Hz. Napięcie
wyjściowe trójfazowe miedzy przewodowe może zmieniać się w zakresie od 0 V do 230 V.
Częstotliwość napięcia wyjściowego może zmieniać się w zakresie od 0,1 Hz do 400 Hz.
Budowa przekształtnika została pokazana na rys. 12.
Rys. 12. Budowa przekształtnika iC5
Wyprowadzenia zacisków przekształtnika pozwalają na zasilanie napięciem stały
bezpośredni obwodu zasilania falownika napięcia. Możliwość taką wykorzystano w pojeździe
elektrycznym z baterią akumulatorów.
Na rys. 13. pokazano wyprowadzenia wszystkich zacisków falownika i zaznaczono ich
funkcje.
11
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
Rys. 13. Zaciski i funkcje przekształtnika iC5
Podczas zajęć laboratoryjnych przekształtniki są zasilane napięciem sieciowym 230V,
50Hz, tj, bateria akumulatorów pojazdu nie jest wykorzystywana. Ponieważ przekształtniki
iC5 nie są wyposażone w moduł hamowania z rezystorem hamującym to nie ma możliwości
pracy generatorowej maszyn. Dlatego konieczne jest ustawianie długich czasów zmniejszania
zadanej częstotliwości i prędkości silnika. Zbyt krótkie czasy mogą powodować wyłączenie
przekształtnika w wyniku zadziałania awarii ponadnapięciowej obwodu pośredniczącego DC.
6. Obsługa przekształtnika
Obsługa przekształtnika jest możliwa lokalnie lub zdalnie odpowiednio przez
przyciski i potencjometr umieszczone bezpośrednio na obudowie układy lub przez program
DriveView uruchomiony na komputerze PC.
12
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
Obsługa lokalna
Przy obsłudze lokalnej wykorzystuje się przyciski RUN, STOP, pokrętło
potencjometru oraz wielofunkcyjny joystick. Dostęp do joysticka jest możliwy po
przesunieciu plastikowej pokrywy przekształtnika. Potencjometrem nastawia się, np. zadaną
prędkość, przycisk RUN mogą realizować komendy startu i zatrzymania silnika. Dodatkowo
na falowniku umieszczono wyświetlaczu i dwie diody LED do sygnalizacji pracy układu.
Podstawowe funkcje diod LED, ekranu i przycisków zamieszczono w tab. 5.
Tabela 5. Funkcje diod LED, ekranu i przycisków
EKRAN
FWD
Świeci się podczas ruchu do przodu
REV
Świeci się podczas ruchu do tyłu
Wyświetlacz
7-Segmentowy
Miga podczas błędu lub awarii
Wyświetla status pracy, wartość parametru, wybraną mierzoną wielkość
Przyciski
RUN
Polecenie uruchom
STOP/RST
STOP : stop operacji / RST : kasowanie błędu
JOYSTICK
Góra / Dół / Lewo / Prawo / Naciśnięcie
Góra
Dół
Lewo
Prawo
Prog/Ent
Potencjometr
Przechodzenie po parametrach do góry lub zwiększanie wartości
parametrów
Przechodzenie po parametrach w dół lub zmniejszanie wartości
parametrów
Przechodzenie po parametrach w lewo lub po cyfrach parametru w
lewo
Przechodzenie po parametrach w prawo lub po cyfrach parametru w
prawo
Ustawianie wartości parametru lub otwieranie kolejnego menu
Zmiana wartości częstotliwości
Menu przekształtnika składa się z czterech grup parametrów pokazanych na rys. 14.
Rys. 14. Grupy parametrów przekształtnika
13
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
Skrócony opis grup parametrów zawiera tab. 6.
Grupa napędu
(Drive group)
Grupa funkcyjna
FU1
Grupa funkcyjna
FU2
Grupa wejść/wyjść
I/O
Tabela 6 .Grupy parametrów przekształtnika
Parametry podstawowe jak zadawanie częstotliwości, czas
przyspieszania / zwalniania
Podstawowe parametry funkcyjne jak ustawienie częstotliwości
wyjściowej, napięcia, zabezpieczeń silnika i falownika
Parametry aplikacyjne jak tryb sterowania, operacja PID, ustawienie
parametrów dla drugiego silnika przy pracy grupowej itp.
Parametry do konstrukcji sekwencji takich jak ustawienie
wielofunkcyjnego terminala wejściowego, wyjściowego, wejść i
wyjść analogowych
Zmiana parametrów
Procedura zmiany parametrów przekształtnika jest następująca:
1. Po uruchomieniu falownika poruszanie się po grupach elementów realizuje Joystik
[◄] [ ►] .
2. Po przycisnieciu Joystika [●] następuje wejście do danej grupy parametrów.
3. Przesuwając [▲] lub [▼] przechodzi się po parametrach w danej grupie.
4. Przyciskając [●] wchodzi się do edycji parametru.
5. Naciśnięcie [◄] [ ►] powoduje podświetlenie zmienianej cyfry.
6. Naciśnięcie [▲] lub [▼] następuje zmiana wartość parametru.
7. Zatwierdzenie zmiany parametru wymaga dwukrotnego przyciśnięciu [●].
8. Wyjście z aktualnej grupy parametrów następuje po wybraniu [◄] lub [ ►].
Poruszanie się po funkcjach prezentuje rys. 15.
Poruszanie sie po grupach parametrów
wybierając [◄]
Poruszanie sie po grupach parametrów
wybierając [►]
Rys. 15. Poruszanie się po grupach parametrów
Podstawowymi parametrami potrzebnymi do uruchomienia falownika to drv i Frq. Drv służy
do ustalenia, w jaki sposób realizowany jest START/STOP falownika. Można wybrać opcję
startu z klawiatury (Keypad) lub poprzez układ zewnętrzny . Parametr Frq służy do wyboru,
w jaki sposób zadawana jest prędkość obrotowa silnika. Można wybrać regulację za pomocą
14
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
klawiatury (Keypad), potencjometru wbudowanego na falowniku (V0) lub sygnałami
analogowymi: napięciowym 0..10V (V1), prądowym 0…20mA (I) lub sumą tych sygnałów.
Możliwe jest też zadawanie sygnałów start/stop i prędkości przez łącze komunikacyjne
RS485. Ważniejsze warianty opisane są w tab. 7.
Tabela 7. Opcje sterowania falownikiem
Widok
na
ekranie
drv
Parametr
Tryb sterowania
napędem START /
STOP
Zakres
min/max
0÷3
Opis
0
Keypad - Start/Stop realizowany poprzez
przyciski na klawiaturze falownika.
1
Sterowanie
poprzez
zaciski
2
3
Frq
Metoda zadawania
częstotliwości
0÷7
Cyfrowa
2
3
4
5
Analogowa
8
Fx/Rx-1
FX - załączenie pracy do przodu
RX - załączenie pracy do tyłu
komunikacja poprzez RS 485
1
7
1
Fx/Rx-2
FX - praca falownika
RX - wybór pracy przód/tył
0
6
Nastawa
fabryczna
Klawiatura 1
Po przyciśnięciu przycisku ENTER
należy nastawić żądaną częstotliwość i
po przyciśnięciu jeszcze raz ENTER
falownik uzyska nową ustawioną
częstotliwość
Klawiatura 2
Po przyciśnięciu przycisku ENTER
można płynnie regulować
częstotliwość falownika przyciskami
góra/dół
V0
Sterowanie potencjometrem
znajdującym się na falowniku
V1
Sterowanie napięciowe zaciskiem V1 w
zakresie 0[V] ÷ 10[V]
I
Sterowanie prądowe zaciskiem I w
zakresie 0 ÷ 20[mA]
V0 + I
Równoczesne sterowanie
potencjometrem na falowniku V0 i
sygnałem prądowym I
V1 + I
Równoczesne sterowanie sygnałem
napięciowym V1 i sygnałem prądowym
I
V0 + V1
Równoczesne sterowanie
potencjometrem na falowniku V0 i
sygnałem napięciowym V1
0
Komunikacja ModBus-RTU
Parametr drC decyduje o kierunku obrotów silnika. W falowniku lewym R (ang. reverse)
natomiast w prawym F (ang. forvard).
15
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
9. Program ćwiczenia
Do każdego z falowników podłączony jest zewnętrzny potencjometr zadajnika oraz
przekaźnik sterujący praca hamulców awaryjnych.
Część 1 – programowanie z lokalnych paneli sterujących
1. Zapoznać się z budową stanowiska. Sporządzić szkic schematu elektrycznego
silnoprądowego i sterowniczego. Określić w jaki sposób sterowany jest przekaźnik.
2. Załączyć zasilanie i zapoznać się z obsługą i działaniem przy aktualnej konfiguracji.
3. Przeprowadzić inicjalizacje pracy falownika przez ustawienie fabrycznych wartości
parametrów.
4. Wprowadzić dane silnika
Parametr
H30
H31
H32
H33
H34
H36
H37
Tabela 8. Parametry silnika.
Opis
Moc silnika
Liczba biegunów silnika
Znamionowy poślizg silnika
Znamionowy prąd silnika
Prąd silnika bez obciążenia
Sprawność silnika
Bezwładność obciążenia
Wartość
1,5 kw
6
3
7,6
2
80
0
5. Skonfigurować układ do sterowania U/f przy zadawaniu start/stop z panelu
czołowego oraz zadawaniu częstotliwości:
a. przez wpisywanie wartości z panelu sterującego,
b. za pomocą potencjometru panelu sterującego,
c. za pomocą zewnętrznego potencjometru.
6. Skonfigurować układ tak aby uzyskać automatyczne załączenie i wyłączenie
przekaźnika przy starcie i zatrzymaniu silnika.
7. Przy zadanych częstotliwościach 5Hz, 10Hz, 25Hz i 50Hz odczytać, za pomocą
funkcji pomiarowych falownika, wielkości: prędkość obrotową silnika, prąd silnika,
napięcie silnika, napięcie na szynie DC, moc na wyjściu falownika.
8. Załączyć funkcję oszczędzania energii ustawiając niezerową wartość parametru F40.
Określić związek między prądem silnika a napięciem wyjściowym falownika po
zastosowaniu tej funkcji dla różnych wartości parametru F40. W sprawozdaniu
wyjaśnić w jakich rodzajach układów napędowych oraz jakich stanach pracy układu
napędowego jest celowe ustawienie funkcji oszczędzania energii? Wyjaśnić jak
funkcja oszczędzania energii wpływa na strumień magnetyczny silnika oraz na
dynamikę regulacji momentu.
Część 2 – wykorzystanie komputera z programem DriveView
Falowniki połączone są z komputerem przez interfejs komunikacyjny szeregowy RS485.
Programowanie i sterowanie falownika przeprowadzić za pomocą programu komputerowego
DriveView.
1. Zapoznać się z budową stanowiska. Sporządzić szkic schematu elektrycznego.
2. Załączyć zasilanie układu i zapoznać się z obsługą i działaniem przy aktualnej
konfiguracji.
16
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
3. Przeprowadzić inicjalizację pracy falownika przez ustawienie fabrycznych wartości
parametrów.
4. Wprowadzić dane silnika i skonfigurować układ do sterowania U/f przy zadawaniu
start/stop oraz zadawania częstotliwości z panelu programu komputerowego PC.
5. Ustawić pracę przekaźników tak aby przy pracy silnika hamulce były zwolnione.
6. Sprawdzić za pomocą funkcji pomiarowych falownika jakie jest maksymalne
napięcie, które może pojawić się na wyjściu falownika.
7. Ustawić ograniczenie częstotliwości maksymalnej tak aby został zachowany stały
stosunek U/f przy dostępnym napięciu zasilania silnika. Stosunek U/f ma być zgodny
ze stosunkiem Un/fn napięcia i częstotliwości znamionowej silnika. Naszkicować
kształt charakterystyki U/f, która ma być realizowana w układzie falownika.
8. Przy zadanych częstotliwościach 5Hz, 10Hz, 25Hz i maksymalnej ustawionej
częstotliwości odczytać, za pomocą funkcji pomiarowych falownika, wielkości:
prędkość obrotową silnika, prąd silnika, napięcie silnika, napięcie na szynie DC, moc
na wyjściu falownika, moment silnika.
9. Ustawić najkrótsze czasy przyspieszania i hamowania.
10. Za pomocą programu komputerowego DriveView przeprowadzić rejestracje, przy
zmianie kierunku obrotów silnika i maksymalnej częstotliwości zadanej,
następujących wielkości:
częstotliwość zadana,
aktualna częstotliwość,
prędkość obrotowa silnika,
prąd silnika,
napięcie silnika,
napięcie na szynie DC,
moc na wyjściu falownika,
moment silnika.
Część 3 – konfiguracja do pracy ze sterowaniem wektorowym
1.
2.
3.
4.
5.
Przeprowadzić inicjalizacje pracy falownika przez ustawienie fabrycznych wartości
parametrów.
Wprowadzić parametry silnika z tab. 8.
Ustawić pracę przekaźników tak aby przy pracy silnika hamulce były zwolnione.
Przeprowadzić procedurę samodostrojenia parametrów silnika - Autotuning. Należy
przejść do H41 i zatwierdzić wartość 1 co umożliwi start procedury. Po
automatycznym zakończeniu procedury odczytać wyznaczone wartości Rs i Lσ,
które należy zanotować w sprawozdaniu.
W sprawozdaniu wyjaśnić jak w sposób pomiarowy i obliczeniowy można
wyznaczyć te parametry.
Skonfigurować funkcję hamowania prądem stałym – tab. 9.
W sprawozdaniu wyjaśnić zasadę działania hamowania prądem stałym silników
indukcyjnych oraz pokazać możliwe schematy połączeń silnika indukcyjnego do
tego typu hamowania. Wyjaśnić jak ten rodzaj hamowania może być
przeprowadzony przy użyciu falownika.
17
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
Tabela 9. Ustawienie parametrów dla funkcji hamowania prądem stałym
Parametr
F4
F8
F9
F10
F11
F12
F13
Opis
Tryb stopu
Częstotliwość od której aktywne jest
hamowanie
Czas opóźnienia hamowania
Napięcie hamowania
Czas hamowania
Napięcie początkowe hamowania
Czas początkowy hamowania
Wartość
1
5,9
0,1
40
1
50
0
6. Wybrać tryb sterowania wektorowego ustawiając parametr H40 na wartość 3.
7. Ustawić czas wzbudzania silnika w parametrze F14. W obu falownikach nastawiony
czas musi być taki sam i możliwie jak najkrótszy, np. 0,5 s.
8. Ustawić funkcję forsowania momentu wpisując parametry F27=0, F28=15 i F29=15.
W sprawozdaniu wyjaśnić znaczenie parametrów F28 i F29.
9. Załączyć układ i sprawdzić działanie.
11. Za pomocą programu komputerowego DriveView przeprowadzić rejestracje,w
różnych stanach pracy takich wielkości jak:
częstotliwość zadana,
aktualna częstotliwość,
prędkość obrotowa silnika,
prąd silnika,
napięcie silnika,
napięcie na szynie DC,
moc na wyjściu falownika,
moment silnika.
W sprawozdaniu porównać zarejestrowane przebiegi uzyskane przy pracy ze sterowaniem
skalarnym (część 2 ćwiczenia) i sterowaniem wektorowym (część 3 ćwiczenia).
10. Zagadnienia
1. Opis ruchu pojazdu dwusilnikowego.
2. Wyjaśnić jak sterować kierunkiem jazdy pojazdu dwusilnikowego bez układu
kierowniczego.
3. Narysować i omówić działanie układu regulacji pojazdu dwusilnikowego z zadawaniem
prędkości w otwartej strukturze regulacji.
4. Narysować i omówić działanie układu regulacji pojazdu dwusilnikowego z zadawaniem
prędkości i zamkniętą strukturą regulacji.
5. Narysować i omówić działanie układu regulacji pojazdu dwusilnikowego z zadawaniem
momentu i zamkniętą strukturą regulacji.
6. Porównać właściwości otwartej i zamkniętej struktury regulacji prędkości i kierunku
jazdy pojazdu dwusilnikowego.
7. Omówić budowę, działanie i cel stosowania luzowników.
8. Omówić dobór hamulca do pojazdu elektrycznego.
9. Jaką rolę spełnia luzownik w badanym pojeździe i w jaki sposób jest sterowany przy
wykorzystaniu przekaźników?
10. Omówić możliwość konfigurację połączeń i możliwość sterowania przekaźnikiem
hamulca awaryjnego.
18
Programowanie falownika SV-iC5 do pracy w układzie napędowym dwusilnikowego pojazdu elektrycznego
11. Narysować i omówić budowę przekształtnika iC5. W jakim celu wyprowadzone są
zaciski P oraz P1?
11. Literatura
3. Koczara W.: Wprowadzenie do napędu elektrycznego, Oficyna Wydawnicza
Politechniki Warszawskiej, Warszawa 2012.
4. Zawirski K., Deskur J., Kaczmarek T.: Automatyka napędu elektrycznego,
Wydawnictwo Politechniki Poznańskiej, Poznań 2012.
5. Grunwald Z. (red): Napęd Elektryczny. WNT, Warszawa 1987.
6. Szklarski L., Dziadecki A., Strycharz J., Jaracz K.: Automatyka napędu elektrycznego.
Wyd. AGH, Kraków 1987.
7. Bisztyga K.: Sterowanie i regulacja silników elektrycznych. WNT, Warszawa 1989.
8. Tunia H., Kaźmierkowski M. Automatyka napędu przekształtnikowego. PWN,
Warszawa 1987.
9. Orłowska-Kowalska T: Bezczujnikowe układy napędowe z silnikami indukcyjnymi.
Wrocław, Oficyna Wydawnicza PW 2003.
10. Jakub Górski. Sterowanie napędem dwusilnikowym, praca dyplomowa magisterska,
Politechnika Gdańska, Wydział Elektrotechniki i Automatyki, Gdańsk 2006.
11. Hetmańczyk J.: Analiza wybranych struktur sterowania dwusilnikowego napędu z
bezszczotkowym silnikami prądu stałego. Autoreferat rozprawy doktorskiej, Wydział
Elektryczny Politechniki Śląskiej, Gliwice 2006.
12. Instrukcja obsługi przemiennika częstotliwości LG serii iC5, LG Industrial Systems /
LS Industrial System.
13. Instrukcja obsługi: SV-iC5 Users Manual, LS Industrial System.
14. Instrukcja obsługi: Drive View Users Manual, LS Industrial System.
19