Politechnika Łódzka
Wydział Elektrotechniki, Elektroniki,
Informatyki i Automatyki
Instytut Elektroenergetyki
Zespół Trakcji Elektrycznej
ĆWICZENIE T3
BADANIE PRZEKSZTAŁTNIKA IMPULSOWEGO
W NAPĘDZIE SILNIKA SZEREGOWEGO PRĄDU STAŁEGO
Cel ćwiczenia: Zapoznanie się z działaniem przekształtnika impulsowego i zbadanie jego
podstawowych charakterystyk.
1.
Uwagi wstępne.
W klasycznych rozwiązaniach lokomotyw prądu stałego rozruch silników lokomotywy
dokonywany jest za pomocą oporów rozruchowych, w których tracona jest pewna energia, a co
wpływa na ogólne zużycie energii dla celów trakcyjnych. Wzrost zużycia energii spowodowany
stratami rozruchowymi osiąga w ruchu podmiejskim do 15 %, w ruchu pasażerskim do 4 %
i w ruchu towarowym do 5 % ogólnego zużycia energii na cele trakcyjne.
Nowe rozwiązania elementów półprzewodnikowych stwarzają możliwości techniczne
wyposażenia lokomotyw w układy rozruchu impulsowego, eliminujące rezystory rozruchowe
i kłopotliwą, skomplikowaną aparaturę stycznikową. Straty energii w układzie rozruchu
impulsowego mogą być oceniane tylko w przybliżeniu, ze względu na złożoność problemu i będą
zależały od wykonania technicznego i technologii przyrządów półprzewodnikowych. Biorąc pod
uwagę parametry obecnie produkowanych elementów, a w szczególności wartości spadków napięć
w okresie przewodzenia można ocenić, że straty w układach impulsowych wynoszą od 1 do 2%
energii pobieranej dla celów trakcyjnych.
Rozruch oporowy wymaga przełączeń w obwodzie głównym lokomotywy dokonywanych
za pomocą styczników, które muszą przerywać prądy o znacznych wartościach. W układach tych
praktycznie niemożliwa jest płynna zmiana prędkości, pojawiają się skoki siły podczas
przechodzenia z jednej charakterystyki na drugą, a poza tym występuje duży wpływ wahań napięcia
sieci trakcyjnej na pracę silników trakcyjnych.
Przetwornice statyczne stwarzają także możliwość przetwarzania prądu stałego na prąd
trójfazowy o regulowanej amplitudzie i częstotliwości napięcia, co umożliwia wykorzystanie do
napędu silników asynchronicznych lub synchronicznych.
Szerokie wprowadzanie układów przekształtników statycznych w trakcji prądu stałego
spowodowane jest szeregiem zalet, jakimi się te układy charakteryzują:
-
niewielkie straty,
-
płynna, bezstykowa regulacja napięcia,
-
możliwość pracy w dowolnym punkcie charakterystyki trakcyjnej,
-
rzadsze występowanie poślizgu kół,
-
lepsze wykorzystanie siły przyczepności,
-
możliwość szybszego oddziaływania na obwód główny lokomotywy,
-
możliwość
łatwej
realizacji
hamowania
elektrycznego
lokomotywy
(oporowego,
rekuperacyjnego i oporowo-rekuperacyjnego),
-
uniezależnienie się od zmian napięcia w sieci trakcyjnej.
Zasada impulsowej regulacji napięcia silników trakcyjnych.
2.
Impulsowa regulacja napięcia a więc i prędkości silników trakcyjnych prądu stałego oparta
jest na dyskretnym przekształceniu energii prądu stałego, która dopływa do obwodu obciążenia
w postaci oddzielnych impulsów. Zmieniając czas trwania impulsu i czas przerwy, można zmieniać
wartość średnią napięcia na zaciskach silników trakcyjnych i tym samym, realizować płynny
rozruch bezoporowy i hamowanie elektryczne silników.
2.1. Regulacja napięcia silników przy pracy trakcyjnej.
Za najbardziej odpowiedni dla sterowania impulsowego silników trakcyjnych można uznać
tyrystorowy lub tranzystorowy przekształtnik impulsowy składający się z wejściowego indukcyjnopojemnościowego filtru Lf Cf , przerywacza P i wyjściowych elementów wygładzających , na który
składają się indukcyjność L0, dioda D0 i bocznik harmonicznych Rh (rys. 1).
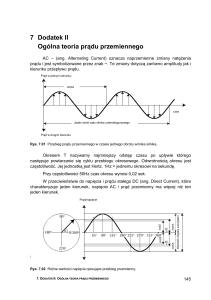
Przy dostatecznie dużej pojemności filtru wejściowego można pominąć pulsacje napięcia na
pojemności Cf i przyjąć, że przy pracy trakcyjnej (rys. 1.a) w okresie przewodzenia przerywacza
t 1 = T do zacisków silnika przyłożone jest napięcie zasilające U.
W
czasie
t 2=(1-)T
-
przerwy
w
przewodzeniu,
kiedy
pod
wpływem
siły
elektromotorycznej samoindukcji dławika L0 i uzwojeń silnika podtrzymywany jest prąd
w obwodzie silnika i diody bocznikującej D0 (dioda zerowa), napięcie Us obciążenia (i na
diodzie D0) jest równe zeru (rys. 1b). Wynika stąd, że wartość średnia napięcia przyłożonego do
silnika równa jest
2
T
t1
1
1
T
U S Udt Udt
U U
T 0
T 0
T
(1)
i jest liniowo zależna od parametru , nazywanego współczynnikiem wypełnienia (rys. 1c).
Pomijając straty w układzie, na podstawie równości mocy na wejściu i na wyjściu przekształtnika
impulsowego można przyjąć, że
U·I = Us·Is
(2)
I = ·Is.
(3)
oraz
Przy tym, w przypadku rozruchu silnika przy stałym prądzie Is, słusznym jest wykres
przedstawiony na rys. 1d.
+
a)
Lf
P
Lo
I
Is
A
Cf
U
Do
E
H
E
Us
Rh
F
b)
T
(1-)T
c)
1
U
t2
d)
U*
1
U s*
Us
t1
U*
Us*
0
I s*
I*
Is*
I*
1
0
1
T
Rys. 1. Zasada pracy układu regulacji impulsowej napięcia silnika szeregowego prądu stałego przy
pracy trakcyjnej. (U*=U/U; US*=US/U; IS*=IS/IS; I*=I/IS)
W procesie regulacji napięcia wyjściowego układu impulsowego współczynnik zmienia
się od minimalnej wartości min do maksymalnej max. Stosunek maksymalnego współczynnika
wypełnienia do minimalnego nazywamy zakresem regulacji.
Regulacja może być zrealizowana zarówno przez zmianę czasu przewodzenia przerywacza
T, jak również przez zmianę okresu cyklu impulsowania T, dlatego zależność okresu od
3
współczynnika wypełnienia określa sposób regulacji. Teoretycznie możliwe są różne sposoby
regulacji impulsowej napięcia silników trakcyjnych, ponieważ w zależności od konkretnych żądań
może być zadana dowolna funkcja T = f(). Najszersze zastosowanie spośród nich znalazły
regulacja ze stałym okresem impulsowania T = const i regulacja ze stałym czasem przewodzenia
impulsatora T = const. Pierwszy sposób regulacji nazywany jest szerokościowym, drugi częstotliwościowym. Stosuje się także kombinowany sposób regulacji, w którym w początku
regulacji utrzymuje się stały minimalny czas przewodzenia i stopniowo zmniejsza się okres T do
wartości zadanej, a w drugim etapie - okres impulsowania jest stały a zwiększa się czas
przewodzenia przerywacza.
2.2. Regulacja napięcia silników przy hamowaniu rekuperacyjnym.
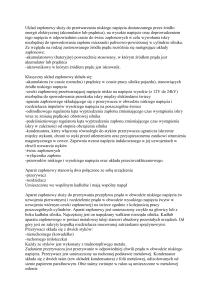
Przy impulsowym hamowaniu rekuperacyjnym (rys. 2a), odwrotnie niż przy pracy
trakcyjnej, napięcie na zaciskach silnika jest równe zeru w przedziale t1 = T (stan przewodzenia
przekształtnika) i równe jest napięciu U kondensatora wejściowego w przedziale czasu t 2 = (1-)·T,
kiedy prąd silnika pod wpływem siły elektromotorycznej samoindukcji dławika w obwodzie
obciążenia i uzwojeń silnika przepływa poprzez diody rozdzielające D (rys. 2b). Wynika stąd, że
wartość średnia napięcia przyłożonego do silnika równa jest Us = (1-)·U i jest liniowo zależna od
parametru (rys. 2c). Przy założeniu bezstratnego przekształcania energii wyznacza się wartość
średnią prądu oddawanego do sieci I = (1-)·Is (rys. 2d).
+
a)
Lf
Lo
D
I
Is
A
P
Cf
U
E
H
F
Us
Rh
E
b)
T
(1-)T
c)
1
U*
Us*
d)
U*
1
Us*
U
I*
Is*
I s*
I*
Us
t1
t2
0
1
0
1
T
Rys. 2. Zasada pracy układu regulacji impulsowej napięcia silnika szeregowego prądu stałego przy
hamowaniu z odzyskiem energii. (oznaczenia jak na rys 1)
4
2.3. Obwód główny impulsowej regulacji napięcia silników trakcyjnych.
Obwód główny układu impulsowej regulacji napięcia składa się ze źródła prądu stałego,
filtru wejściowego, przerywacza, filtru wyjściowego (np. dławika) i obciążenia.
Ponieważ przekształtnik impulsowy pobiera prąd w postaci oddzielnych impulsów,
konieczne jest umieszczenie na jego wejściu filtru o dużej mocy. W charakterze filtru wejściowego
najczęściej stosuje się filtr LC typu , składający się z szeregowo włączonego dławika i równolegle
włączonego kondensatora. Stosuje się również bardziej złożone filtry LC, w szczególności
podwójne. Pojemność filtru służy nie tylko do wygładzania prądu wejściowego (zmniejszenie
pulsacji), ale też zniesienia wpływu indukcyjności sieci trakcyjnej na przekształtnik.
Dla przekształcenia średnich i dużych mocy stosuje się głównie przekształtniki tyrystorowe
i tranzystorowe (tranzystory IGBT z izolowaną bramką). W przekształtnikach tych, w obwodach
prądu stałego konieczne są specjalne układy gaszące, wyłączające tyrystory układu. Istnieje wiele
układów gaszenia tyrystorów. Zwykle zawierają one kondensator komutujący i dławik, które
stanowią obwód drgający LC. Dla zmiany chwili gaszenia tyrystorów w wielu układach regulacji
impulsowej wykorzystywane są pomocnicze "gaszące" tyrystory i diody.
Filtr wyjściowy zwykle składa się z dławika wygładzającego i diody bocznikującej
obciążenie. W celu zmniejszenia strat magnetycznych w silnikach trakcyjnych i zmniejszenia
pulsacji ich siły elektromotorycznej uzwojenia wzbudzenia często bocznikowane są na stałe
włączonym rezystorem (bocznik harmonicznych) Rh (rys. 1 i 2) dającym niewielkie osłabienie pola
(rzędu 45%).
a)
+
Lf
Lo
T
i
Cf
U
is
A
Do
E
H
E
Us
iD0
Rh
F
-
5
b)
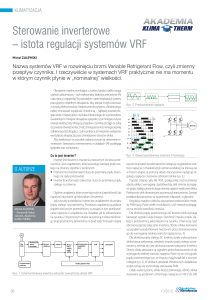
Rys. 3. Układ przekształtnika impulsowego z tranzystorem IGBT (a)
oraz przebiegi napięcia uS i prądu iS silnika (b).
Przykład obwodu głównego napędu silnika szeregowego z przekształtnika na tranzystorze
IGBT oraz przebiegi napięcia na silniku i jego prądu przy założeniu stałej wartości napięcia na
kondensatorze filtru wejściowego przedstawia rys. 3.
2.3.1 Przebiegi prądów w układzie przy pracy trakcyjnej.
Przebiegi prądów w układzie przekształtnika wyznacza się przy założeniu niezmiennej
prędkości obrotowej silnika i stałej jego sile elektromotorycznej E silnika.
Prąd silnika w obwodzie z rys. 3 opisują następujące równania różniczkowe:
-
gdy przewodzi tranzystor T
U E Ri s L
-
dis
dt
(4)
gdy przewodzi dioda D0 (T jest zablokowany)
E Ri s L
dis
dt
(5)
gdzie: R – rezystancja w obwodzie silnika,
L – suma indukcyjności w obwodzie silnika.
Zakładając ciągłość przepływu prądu silnika (rys. 3b) i przyjmując, że w chwili t0
pojawienia się impulsu napięcia prąd ma wartość najmniejszą Imin , a w chwili t1, gdy impuls
napięcia się kończy, wartość maksymalną Imax otrzymuje się rozwiązanie równań różniczkowych
(4) i (5) w postaci:
-
gdy przewodzi tranzystor T
iS ( t )
6
U E
t t0
t t0
1 exp(
) I min exp
(6)
R
-
gdy przewodzi dioda D0
iS ( t )
gdzie:
L
R
E
t t1
t t1
1 exp(
) I max exp
R
(7)
– stała czasowa elektryczna w obwodzie silnika,
Imax
– wartość minimalna prądu silnika Imin=iS(t0)=iS(t2),
Imin
– wartość maksymalna prądu silnika Imax=iS(t1).
Przy pracy ustalonej silnika otrzymuje się wartości prądów:
I max
U E
t t
T
t t U E
T
1 exp( 1 0 ) I min exp 1 0
1 exp(
) I min exp
R
R
I min
E
t t
E
(1 )T
t t
(1 )T
1 exp( 2 1 ) I max exp 2 1 1 exp(
) I max exp
R
R
Pamiętając, że t2-t0=T w wyniku rozwiązania powyższego układu równań otrzymuje się
następujące wartości prądów maksymalnego i minimalnego:
I max
I min
U 1 exp( T / ) E
R 1 exp( T / ) R
U exp( (1 )T / ) exp( T / ) E
R
1 exp( T / )
R
(8)
(9)
2.3.2 Tętnienia prądu silnika.
Tętnienia prądu silnika wyznacza się jako różnicę jego prądu maksymalnego i minimalnego:
U 1 exp( T / ) E U exp( (1 )T / ) exp( T / ) E
I S I max I min
R 1 exp( T / ) R R
1 exp( T / )
R
I S
U 1 exp( T / ) exp( (1 )T / ) exp( T / )
R
1 exp( T / )
I S
U 1 exp( T / ) 1 exp( (1 )T / )
R
1 exp( T / )
(10)
Wartość maksymalna tętnienia prądu występuje dla wartości =0,5 i wynosi
I S
max
U 1 exp( T / 2 )
R 1 exp( T / 2 )
(11)
Posługując się ostatnim wzorem trudno jest wnioskować o wpływie częstotliwości
impulsowania i indukcyjności obwodu silnika trakcyjnego na amplitudę wahań prądu IS. Jeśli
7
przyjąć, że stała czasowa silnika jest znacznie większa od okresu impulsowania T to podane
wyżej wzory da się przekształcić do prostszej postaci:
I S
I S
U T
U
(1 )
(1 )
R
L f
max
U T
R 4
(12)
(13)
Tętnienia prądu nie zalezą od siły elektromotorycznej E silnika a tylko od okresu
impulsowania i stałej czasowej obwodu silnika. Zmniejszenie tętnienia prądu można uzyskać
poprzez zwiększenie indukcyjności w obwodzie silnika lub zwiększenie częstotliwości
impulsowania przekształtnika ( czynnik
T
we wzorach 12 i 13). Wpływ tych parametrów oraz
wpływ współczynnika wypełnienia na tętnienia prądu obciążenia przedstawia rys. 4.
Rys. 4. Tętnienia prądu silnika w zależności od współczynnika wypełnienia
oraz stosunku stałej czasowej odbiornika do okresu impulsowania przekształtnika /T.
3. Badanie układu przekształtnika.
3.1. Układ pomiarowy
Układ przekształtnika zawiera elektroniczny układ sterujący, dla którego możliwy jest
podgląd napięcia ust włączającego tranzystor IGBT oraz część siłową obejmującą sam tranzystor
IGBT oraz dwie diody. Obciążeniem przekształtnika jest obwód RL oraz silnik szeregowy.
8
+
A1
A2
osc
A3
R
A
Rb
Z
A2
V1
V2
a)
B
ust
ON
OFF
b)
S
P
L
osc
osc
R
C
Rys. 5. Schemat układu pomiarowego.
Wykaz przyrządów
Z
-
zasilacz napięcia stałego
V1, V2
-
woltomierz magnetoelektryczny
A1, A2, A3
-
amperomierz magnetoelektryczny
S
-
silnik szeregowy prądu stałego
P
-
prądnica szeregowa prądu stałego
Osc.
-
oscyloskop
3.2. Pomiar częstotliwości impulsowania przekształtnika.
Za pomocą oscyloskopu pomierzyć częstotliwość impulsów napięcia sterującego ust.
Wyznaczyć minimalny i maksymalny współczynnik wypełnienia .
T = ............,
min = ...... ,
f =..........Hz
max = .......
3.3. Pomiar charakterystyk prądowych i napięciowych przekształtnika oraz tętnień
prądu obciążenia w funkcji współczynnika wypełnienia .
Połączyć układ według schematu z rys. 5a.
Dla rezystancji R = ....... wskazanej przez prowadzącego laboratorium oraz indukcyjności
dławika L na zaczepie 4 pomierzyć wartości napięcia zasilającego, prądu zasilającego i obciążenia
oraz tętnienia prądu obciążenia dla współczynnika wypełnienia od 0,1 do 0,9. Tętnienia prądu
wyznaczyć na podstawie pomiaru oscyloskopem napięcia na boczniku R b. Współczynnik
wypełnienia wyznaczyć z kształtu napięcia wyjściowego.
9
U = ......... V
[-]
I
[A]
US
[V]
IS
[A]
ub
[ mV ]
IS
[A]
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
Pomiary powtórzyć dla tej samej rezystancji R oraz dla indukcyjności mniejszej niż
poprzednio.
3.4. Pomiar charakterystyk n=f(I) silnika w funkcji współczynnika wypełnienia .
Połączyć układ według schematu z rys. 5b.
Pomierzyć wartości prędkości obrotowej nS silnika szeregowego w funkcji prądu IS
( IS ≤ 10 A ) dla współczynników wypełnienia od 0,1 do 0,9. Współczynnik wypełnienia
wyznaczyć z kształtu napięcia wyjściowego lub napięcia sterującego.
U1 = ......... V,
= 0,1
n
[obr/min]
IS
[A]
n
[obr/min]
...
...
...
= 0,9
n
10
[obr/min]
IS
[A]
n
[obr/min]
4. Wykonanie sprawozdania.
W sprawozdaniu należy umieścić wyniki pomiarów z punktów 4.1 ÷ 4.3.
Dla punktu 4.2 przedstawić wykresy zależności US = f(), I1/IS = f() oraz IS = f().
Dla punktu 4.2 przedstawić wykresy zależności n = f(IS) dla wszystkich wartości .
Sprawozdanie winno zawierać wnioski.
5. Literatura.
1. Nowak M., Barlik R.: Poradnik inżyniera energoelektronika, WNT, Warszawa1998,
2. Tunia H., Winiarski B.: Energoelektronika, WNT, Warszawa 1994.
11
12
Częstotliwość impulsowania
T = ............,
f =..........Hz
min = ...... ,
max = .......
Charakterystyki prądowe i napięciowe przekształtnika oraz tętnienia prądu obciążenia.
U = ......... V,
L1
0,1
0,2
0,3
0,4
0,5
0,6
0,7
[-]
I
[A]
US
[V]
IS
[A]
ub
[ mV ]
I2
[A]
U1 = ......... V,
0,1
[-]
I
[A]
US
[V]
IS
[A]
ub
[ mV ]
IS
[A]
L2 L1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
0,8
0,9
Pomiar charakterystyk n=f(I) silnika w funkcji współczynnika wypełnienia .
U = ......... V,
IS
[A]
=0,1
n
[obr/min]
=0,2
=0,3
=0,4
=0,5
=0,6
=0,7
=0,8
=0,9
IS
[A]
n
[obr/min]
IS
[A]
n
[obr/min]
IS
[A]
n
[obr/min]
IS
[A]
n
[obr/min]
IS
[A]
n
[obr/min]
IS
[A]
n
[obr/min]
IS
[A]
n
[obr/min]
IS
[A]
n
[obr/min]
13




![T[ms] - ETI PG](http://s1.studylibpl.com/store/data/000981699_1-af2b03261cda5b808e2da237a492daef-300x300.png)