PROJEKTOWANIE
SYSTEMÓW
KOMPUTEROWYCH
WYKŁAD NR 2
PROCESORY KOMPUTEROWE
dr Artur Woike
Historia
mikroprocesorów
Procesor Viatron
• Termin „mikroprocesor” został wprowadzony przez
amerykańską firmę Viatron Computer Systems
(założona w 1967 r., zbankrutowała w 1971 r.).
• W 1968 r. stworzyła ona mały komputer o nazwie
System 21.
• Podstawowy zestaw składał się z mikroprocesora,
pamięci RAM, klawiatury, panelu kontrolnego,
9” monitora CRT i maksymalnie dwóch urządzeń
peryferyjnych (np. czytnika/perforatora kart,
kasetowego napędu magnetycznej pamięci
taśmowej).
Procesor Four-Phase Systems Inc.
• Four-Phase Systems Inc. była amerykańską firmą
komputerową założoną w 1969 r. (w latach 19811982 wykupiona przez Motorolę).
• W 1970 r. zaprojektowała ona 8-bitowy moduł
o nazwie AL-1.
• AL-1 zawierał osiem rejestrów i jedną jednostkę
arytmetyczno-logiczną.
• Z połączenia trzech modułów AL-1, trzech modułów
pamięci ROM i trzech układów „random logic”
powstawał 24-bitowy mikroprocesor.
• W 1995 r. Lee Boysal (twórca AL-1) zmontował
na potrzeby eksperymentu procesowego system
komputerowy zawierający pojedynczy moduł AL-1
jako mikroprocesor, moduł pamięci ROM, moduł
pamięci RAM i moduł I/O.
Grumman F-14 Tomcat
• Jest to ponaddźwiękowy, 2-miejscowy, 2-silnikowy
samolot myśliwski o zmiennej geometrii skrzydeł.
• Oblatany 21.12.1970 r., w użyciu od 1974 do 2006 r.
Garret AiResearch MP944
• Początki firmy Garret AiReseaech sięgają 1936 r.
• Firma wielokrotnie zmieniała nazwę (obecnie część
koncernu Honeywell International, Inc.), ale zawsze
zajmowała się techniką lotniczą.
• MP944 jest to mikroprocesor obsługujący centralę
aerometryczną w myśliwcu F-14 Tomcat.
• Prace projektowe rozpoczęto na zamówienie
Marynarki Wojennej USA w 1968, a zakończono
w 1970 r.
• MP944 był 20-bitowym układem obsługującym
przetwarzanie potokowe.
• W 1971 r. Ray Holt (jeden z twórców MP944) opisał
ten układ w artykule do branżowego czasopisma
„Computer Design”.
• Z uwagi na znaczne zaawansowanie konstrukcji
artykuł i projekt utajniono aż do 1997 r.
Texas Instruments TMS1000
•
•
•
•
•
Firmę Texas Instruments założono w 1951 r.
TMS1000 został zaprojektowany w 1971 r.
Oficjalnie zaprezentowany 17.09.1971 r.
Produkowany w latach 1974-1981.
Jest to pierwszy jednoukładowy komputer (pojedynczy
układ scalony zawiera procesor, pamięć RAM, pamięć
ROM, układy I/O oraz zegar taktujący).
• Texas Instruments posiada patent na mikroprocesor
(od 1973 r.) i na mikrokomputer jednoukładowy
(od 1978 r.).
• Po raz pierwszy wykorzystany
w kalkulatorze SR-16.
• Parametry techniczne:
•
•
•
•
•
•
Procesor 4-bitowy;
Częstotliwość taktowania 300 kHz;
Wyprodukowany w technologii 8 m;
32 B pamięci RAM i 1024 B pamięci ROM;
42 rozkazy;
8 rejestrów (dwa 6-bitowe, cztery 4-bitowe, jeden 2bitowy i jeden 1-bitowy).
Intel 4004
• Firma Intel (nazwa pochodzi od słów Integrated
Electronics) została założona w 1968 r.
• W 1969 r. firma Busicom (japoński producent
kalkulatorów) zamówił projekt układu scalonego
dla wysoko wydajnych kalkulatorów.
• Marcian Hoff, inżynier przydzielony do prac
projektowych, zaproponował realizację układu
w postaci 4-składnikowej architektury.
• W skład zaproponowanej architektury wchodziły
następujące moduły:
•
•
•
•
4-bitowa programowalna jednostka obliczeniowa;
Układ pamięci ROM do przechowywania programu;
Układ pamięci RAM do przechowywania danych;
Proste urządzenie I/O.
• Początkowo Busicom odrzucił propozycję takiego
układu i zażądał zaprojektowania układu scalonego
dedykowanego dla kalkulatorów.
• Intel 4004 został przedstawiony 15.11.1971 r.
• Był produkowany od 1971 do 1981 r.
• Jest uznawany za pierwszy powszechnie dostępny
mikroprocesor.
• Parametry techniczne:
•
•
•
•
•
•
•
•
Procesor 4-bitowy;
Zbudowany z około 2300 tranzystorów;
Wyprodukowany w technologii 10 m;
Powierzchnia kości 12 mm2;
Szybkość około 92 kIPS;
Maksymalna częstotliwość taktowania 740 kHz;
Oddzielna pamięć dla danych i programu;
Pojedyncza multipleksowana szyna dla transferu 12bitowych adresów, 8-bitowych instrukcji i 4-bitowych
słów danych;
• Możliwość zaadresowania 640 B pamięci RAM i 4096 B
pamięci ROM;
• 46 rozkazów (41 rozkazów 8-bitowych i 5 rozkazów 16bitowych);
• 16 rejestrów 4-bitowych.
Budowa i zasada
działania procesora
Procesor i jego zadania
• Procesor jest inaczej nazywany centralną jednostką
wykonawcza (Central Processing Unit, CPU).
• Jest to układ scalony, którego przeznaczeniem jest
wykonywanie rozkazów.
• Procesor nadzoruje pracę wszystkich podzespołów
komputera.
• Zazwyczaj jest zorganizowany w postaci zespołu
współpracujących ze sobą bloków funkcjonalnych.
• Procesor pobiera wykonywane instrukcje z pamięci.
• Często przed wykonaniem instrukcje złożone
są rozkładane na ciągi rozkazów elementarnych
(mikrooperacji).
• Procesor rozdziela wykonanie przetwarzanych
rozkazów na swoje poszczególne podjednostki.
• Przykładowe rozkazy jakie mogą wykonywać
procesory:
•
•
•
•
•
Działania arytmetyczne;
Działania logiczne;
Instrukcje skoków;
Instrukcje warunkowe;
Kopiowanie danych (np. rejestr-rejestr, pamięć-rejestr).
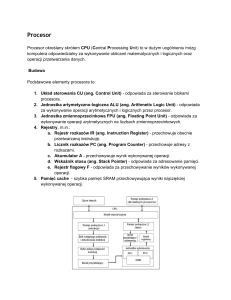
• Podstawowe moduły składowe procesora:
• Jednostka arytmetyczno-logiczna (Arithmetic Logic Unit,
ALU) – wykonuje podstawowe operacje logiczne oraz
działania na liczbach całkowitych.
• Rejestry (Registers) – przechowują np. adresy komórek
pamięci, dane, wyniki obliczeń, informacje o stanie
procesora.
• Jednostka zmiennoprzecinkowa (Floating-Point Unit,
FPU) – wykonuje obliczenia numeryczne na liczbach
zmiennoprzecinkowych oraz niektóre inne złożone
instrukcje obliczeniowe.
• Układy sterujące – zajmują się np. dekodowaniem
instrukcji, dostarczaniem danych z pamięci dla ALU i FPU,
przekazywaniem do pamięci wyników obliczeń.
• Pamięć podręczna (Cache) – przyspiesza dostęp
do pamięci komputera.
Schemat blokowy procesora
• Blok komunikacyjny (Bus Unit, BU):
• Potocznie nazywany szyną procesora;
• Odpowiada za współpracę z pamięcią przechowującą
instrukcje, dane i wyniki obliczeń.
• Zazwyczaj składa się z dwóch oddzielnych magistrali
dla adresów i danych.
• Zarządzanie szyną adresową i szyną danych odbywa się
za pomocą dodatkowych sygnałów kontrolnych
i sterujących.
• Kolejka rozkazowa (Prefetch):
• Aby zapewnić płynną pracę procesora kod programu jest
pobierany w większych porcjach.
• Wstępnie pobrane dane do wykonania oczekują
na wykonanie w kolejce.
• Oczekujący na wykonanie kod jest przechowywany
w postaci zakodowanej.
• Dekoder instrukcji (Instruction Unit, IU):
• Instrukcje przeznaczone do wykonania są dekodowane
w bloku dekodera.
• Często dekoder jest wspomagany przez dedykowaną
podręczną pamięć stałą ROM zawierającą słownik
tłumaczący zdekodowane instrukcje na sekwencje
elementarnych rozkazów.
• Jednostka wykonawcza (Execution Unit, EU):
• Zdekodowane rozkazy przekazywane są do jednostki
wykonawczej w celu ich wykonania.
• Rozkazy operujące na liczbach stałoprzecinkowych
(całkowitych) są przekazywane do wykonania w module
ALU.
• Blok sterujący (Control Unit, CU) odpowiada
za sterowanie pracą modułu ALU.
• Rozkazy operujące na liczbach zmiennoprzecinkowych
są przekazywane do wykonania w module FPU.
• Jednostka adresowania (Adressing Unit, AU):
• Rozkazy często zawierają odwołania do pamięci
operacyjnej (np. argumenty rozkazu).
• Wyniki instrukcji często trzeba zapisać w ściśle
określonym obszarze pamięci.
• W takich sytuacjach za dostęp do pamięci odpowiada
właśnie jednostka adresowania.
• Ze względu na konieczność stosowanie w dostępie
do pamięci dodatkowych mechanizmów technicznych
(np. stronicowania i segmentacji) potrzebna jest
wyspecjalizowana podjednostka zarządzania pamięcią
(Memory Management Unit, MMU).
Uwagi:
• Obecnie schemat może ulegać stopniowemu rozmyciu.
• Dla współczesnych mikroprocesorów nie zawsze daje się
zastosować tak wyraźny podział na wyspecjalizowane
bloki funkcjonalne.
Jednostka arytmetyczno-logiczna
• Jednostka arytmetyczno-logiczna (Arithmetic Logic
Unit, ALU) jest centralnym blokiem procesora.
• ALU zazwyczaj wykonuje następujące rozkazy:
• Operacje arytmetyczne (np. dodawanie, odejmowanie,
negacja liczby, zwiększanie lub zmniejszanie liczby o 1,
mnożenie, dzielenie, dzielenie modulo).
• Przesunięcia bitowe (np. o stałą lub zmienną liczbę
bitów).
• Operacje logiczne (np. AND, OR, NOT, XOR).
Oznaczenia:
• A, B – operandy (argumenty);
• F – wejście z jednostki kontrolnej CU;
• R – wyjście;
• D – status wyjścia.
Jednostka zmiennoprzecinkowa
• Pierwowzorem jednostki zmiennoprzecinkowej
(Floating-Point Unit, FPU) jest koprocesor.
• Koprocesor jest układem, którego zadaniem jest
wspomaganie pracy procesora przy wykonywaniu
obliczeń numerycznych.
• Koprocesory w formie zewnętrznych układów były
stosowane do architektury 80486 włącznie.
• Układ procesor-koprocesor jest traktowany jako
pojedynczy procesor o zwiększonej liczbie
dostępnych rejestrów, rozkazów i typów danych .
• Koprocesory nie mogą pracować samodzielnie
(bez procesora głównego).
• Począwszy od architektury 80486 rolę układu
zewnętrznego koprocesora przejęły wbudowane
w układ procesora jednostki zmiennoprzecinkowe.
• Jednostki zmiennoprzecinkowe zajmują się nie tylko
operacjami zmiennoprzecinkowymi, ale również
innymi bardziej skomplikowanymi obliczeniami
(np. operacjami wektorowymi).
Pamięć podręczna
• Najszybszą dostępną dla procesora pamięcią
są jego wewnętrzne rejestry.
• Procesory o coraz większych częstotliwościach
taktowania do optymalnej pracy wymagają coraz
szybszych pamięci komputerowych.
• Stosowana obecnie pamięć operacyjna typu DRAM
(Dynamic Random Access Memory) nie może
sprostać zapotrzebowaniu na dane współczesnych
procesorów.
• Pamięć podręczna (Cache) jest buforem pomiędzy
procesorem a pamięcią operacyjną
• Jest to pamięć o krótkich czasach dostępu.
• Duża i tania pamięć operacyjna jest wspomagana
przez szybką i małą (więc nie aż tak drogą) pamięć
podręczną.
• Rozwinięciem idei pamięci podręcznej jest kaskada
pamięci podręcznych.
• W kaskadzie każdy kolejny poziom (Level) jest
większy i wolniejszy od poprzedniego.
• W praktyce obecnie używa się maksymalnie trzech
poziomów pamięci podręcznej.
• Efektywne wykorzystanie pamięci podręcznej jest
możliwe dzięki dużej spójności kodu programów
przetwarzanych przez mikroprocesory.
• W procesorach opartych na architekturze NetBurst
(np. Pentium 4, Pentium D) nie było klasycznej
pamięci podręcznej poziomu 1 (zamiast tego była
implementowana pamięć podręczna dla wcześniej
zdekodowanych mikrooperacji).
• Czasami uwzględnia się pamięć podręczną
mikrooperacji jako poziom 0.
• Obecnie często pamięć podręczna poziomu 1 jest
rozdzielona na dwie oddzielne części (dla instrukcji
i dla danych).
• Pamięć podręczna poziomu 2 zazwyczaj jest
zunifikowana.
• Pamięć podręczna poziomu 3 najczęściej jest
wspólna dla wszystkich rdzeni procesora.
• Wpływ wielkości pamięci podręcznej na wydajność
jest złożony.
Techniki przetwarzania
rozkazów
Architektura typu RISC
• Termin RISC (Reduced Instruction Set Computer)
powstał w trakcie prac nad projektem procesora
IBM 801.
• Prace nad projektem IBM 801 rozpoczęto w 1974 r.
• IBM 801 osiągał wydajność rzędu 15 MIPS.
• Architektura RISC charakteryzuje się ograniczeniem
listy rozkazów procesora do niewielkiej liczby
bardzo szybko wykonywanych operacji.
• W założeniu większość rozkazów jest realizowanych
sprzętowo, a więc można ograniczyć konieczność
stosowania dekodera instrukcji.
• Szybkość przetwarzania rozkazów RISC jest duża.
• Tłumaczenie programu z instrukcji złożonych
na rozkazy RISC jest wykonywane przez kompilator.
• Procesor musi pobrać wcześniej przetłumaczony
kod programu z pamięci komputera.
• W naturalny sposób pojawia się zapotrzebowanie
na dużą przepustowość magistrali procesor-pamięć.
Architektura typu CISC
• Architektura CISC (Complex Instruction Set
Computer) jest stosowana np. we wszystkich
wersjach architektury x86 firmy Intel.
• Procesory projektowane w architekturze CISC
realizują coraz więcej rozkazów, które mogą być
coraz bardziej skomplikowane.
• Pojedynczy rozkaz może wymagać wykonania
szeregu działań.
• Czas wykonywania rozkazu CISC może być bardzo
długi (np. kilkadziesiąt cykli zegara).
• Programy napisane dla procesorów CISC mają
zwarty kod.
• Tłumaczenie programu na rozkazy wykonuje
dekoder, który przy takim podejściu musi być
obszerny.
• Pobieranie kodu programu przez procesor jest
ułatwione (w stosunku do architektury RISC).
Obecne architektury RISC i CISC
• Początkowo architektury RISC i CISC stanowiły
odrębne kategorie.
• Obecnie podział między nimi ulega rozmyciu.
• Procesory RISC często mają długie listy rozkazów.
• Niektóre rozkazy RISC mogą być skomplikowane.
• Obecne procesory CISC często posiadają jądro
pracujące w trybie RISC.
Przetwarzanie potokowe
• Przetwarzanie potokowe polega na podzieleniu
czasu pracy procesora nad pojedynczym rozkazem
na kilka faz (stopni).
• Potok (Pipeline) w tym samym czasie pracuje nad
wykonaniem kilku rozkazów.
• Każdy rozkaz znajduje się w innej fazie wykonania.
• W każdym cyklu zegara taktującego zostaje
wykonany 1 rozkaz.
• Liczba stopni potoku (Pipeline Stages) jest
nazywana głębokością potoku.
• Podczas przetwarzania potokowego mogą się
pojawić dwie sytuacje wyjątkowe:
• Wstrzymanie potoku (np. na skutek wystąpienia
wzajemnej zależności rozkazów lub konfliktu rejestrów).
• Oczyszczenie potoku (np. na skutek wystąpienia błędu).
• Zazwyczaj wyróżniamy 4 podstawowe fazy potoku:
•
•
•
•
Pobranie (Fetch, F);
Dekodowanie (Decode, D);
Wykonanie (Execute, E);
Zakończenie (Write-Back, WB).
• W konkretnej implementacji przetwarzania
potokowego podstawowe fazy mogą być
podzielone na mniejsze bardziej uszczegółowione
stopnie.
Przetwarzanie 64-bitowe
• O typie procesora zazwyczaj decyduje rozmiar
rejestrów ogólnego przeznaczenia.
• Niektóre procesory mają część rejestrów większych
od rejestrów ogólnego przeznaczenia.
• Współczesny rynek procesorów przeznaczonych
dla komputerów osobistych jest zdominowany
przez dwie firmy:
• Intel Corporation (założona w 1968 r.);
• Advanced Micro Devices (założona w 1969 r.).
• Obie firmy na przełomie XX i XXI w. prowadziły
prace koncepcyjne nad 64-bitową architekturą
dla mikroprocesorów.
• Intel opracował architekturę IA-64.
• Pierwsze procesory oparte na architekturze IA-64
(Intel Itanium) zadebiutowały na rynku w 2001 r.
• AMD opracowało architekturę AMD64 (oznaczaną
również x86-64), będącą rozszerzeniem 32-bitowej
architektury x86-32 firmy Intel).
• Pierwsze procesory oparte na architekturze AMD64
(procesory AMD K8, obecnie AMD Family 0Fh)
pojawiły się na rynku w 2003 r.
Architektura IA-64
Założenia koncepcyjne:
• Architektura x86 jest ograniczona.
• Zgodność z poprzednimi generacjami mikroprocesorów
i dostępnym dla nich oprogramowaniem komplikuje
strukturę i działanie nowych mikroprocesorów.
• Wsteczna zgodność utrudnia innowacyjność.
• Dla komputerów o dużej wydajności będzie dostępne
dedykowane dla nich oprogramowanie skompilowane
w sposób optymalny.
• Nie będzie dużego zapotrzebowania na wykonywanie
aplikacji skompilowanych dla architektury x86-32.
• Komputery o dużej wydajności nie muszą wykonywać
powszechnie dostępnego oprogramowania w sposób
maksymalnie wydajny.
• Przeciętny użytkownik nie potrzebuje możliwości danych
przez przetwarzanie 64-bitowego.
• Przeciętny użytkownik nie będzie zainteresowany
zakupem 64-bitowego mikroprocesora.
Efekt:
• Architektura IA-64 nie jest oparta na architekturze
x86-32.
• Architektura IA-64 nie jest zgodna z architekturą x86-32.
• Procesory produkowane w oparciu o architekturę IA-64
posiadały dodatkowy moduł sprzętowy emulujący
działanie procesora x86-32.
• Niewielka wydajność w aplikacjach przeznaczonych
dla architektury x86-32.
Architektura AMD64
Założenia koncepcyjne:
• Architektura x86-32 ma swoje ograniczenia.
• Dalszy rozwój architektury x86-32 pozwoli wiele z nich
usunąć.
• Zgodność z poprzednimi generacjami mikroprocesorów
i dostępnym dla nich oprogramowaniem jest zaletą.
• Przejście na w pełni 64-bitowe oprogramowanie będzie
dokonywane bardzo powoli.
• Komputery o dużej wydajności muszą jeszcze (przez jakiś
czas) wykonywać kod powszechnie dostępnych aplikacji
skompilowanych dla architektury x86-32 w sposób
maksymalnie efektywny.
• Przeciętny użytkownik już niedługo zostanie postawiony
przed koniecznością wykorzystania możliwości danych
przez przetwarzanie 64-bitowe (np. w celu umożliwienia
efektywnej obsługi więcej niż 4 GB pamięci RAM).
Efekt:
• Całkowita zgodność z oprogramowaniem przeznaczonym
dla architektury x86-32.
• Brak emulacji architektury x86-32 (wbudowany tryb
Legacy Mode).
• Duża wydajność w aplikacjach przeznaczonych
dla architektury x86-32.
• Możliwość zaadresowania 1 TB pamięci RAM (przy
zastosowaniu 40-bitowej magistrali adresowej).
• Możliwość przydzielenia pojedynczemu procesowi
do 256 TB pamięci wirtualnej.
• Wbudowanie kontrolera pamięci w strukturę procesora
w celu skrócenia czasu dostępu do pamięci operacyjnej.
IA-64 czy AMD64?
• Ostatecznie na rynku komputerów osobistych
przyjęła się koncepcja firmy AMD.
• Architektura AMD64 jako rozwinięcie architektury
x86-32 ograniczyła konieczność stosowania
całkowicie nowego oprogramowania.
• Firma Intel (od zmodyfikowanej architektury
NetBurst) zaczęła wyposażać swoje procesory
w tryb zgodności z architekturą AMD64 (Enhanced
Memory 64-bit Technology, EM64T).
• Obecnie wszystkie nowe modele procesorów
są zgodne z architekturą AMD64.
Techniki przyspieszania
przetwarzania
Przetwarzanie superskalarne
• Procesor superskalarny posiada co najmniej 2
pracujące równolegle potoki.
• Równoległe potoki nie stanowią niezależnych
obiektów.
• Dołączenie drugiego i kolejnych potoków nie daje
gwarancji stałego wzrostu wydajności.
• Procesory superskalarne mogą zawierać wiele
modułów ALU i FPU.
• Niektóre potoki mogą być wyspecjalizowane
(wykonywanie wybranych rozkazów).
• FPU często traktuje się jako wyspecjalizowany
potok.
Przemianowywanie rejestrów
• Nie wszystkie rozkazy wykonywane przez procesor
dają się rozdzielić na równoległe potoki.
• Najczęstszą przyczyną konfliktów są odwołania
do tych samych rejestrów procesora.
• Przemianowywanie rejestrów (Register Renaming)
jest metodą polegającą na tymczasowym
podstawianiu dodatkowych rejestrów procesora
(pomocniczych) w sytuacji wystąpienia rozkazów
powodujących konflikt.
Przewidywanie skoków
• Do wykorzystania pełnej mocy obliczeniowej CPU
konieczny jest stały dopływ instrukcji do wykonania.
• W przypadku wystąpienia instrukcji warunkowej
nie wiadomo jak przebiegnie realizacja dalszej
części programu.
• Po rozstrzygnięciu warunku instrukcji typu „if”
(zazwyczaj w okolicach środka potoku) może się
okazać, że potok zawiera i przetwarza rozkazy
z niewłaściwej gałęzi kodu programu.
• Im dłuższy potok, tym więcej niewłaściwych
rozkazów może w nim wystąpić.
• Oczyszczenie potoku ze zbędnych instrukcji jest
czasochłonne i jest stratą czasu procesora.
• Występują dwa podstawowe podejścia:
• Przewidywanie dalszego biegu programu (Branch
Prediction);
• Podążanie wieloma ścieżkami rozgałęzienia (Multiple
Paths of Execution).
• Prawdopodobieństwo przewidzenia właściwej
gałęzi programu jest zawsze mniejsze od 1.
• Podążanie wieloma ścieżkami wymaga powielania
wielu modułów procesora, ponadto wielokrotne
zagnieżdżenia kodu szybko mogą wyczerpać każdą
dostępną ilość zasobów sprzętowych.
• Współczesne procesory w większości korzystają
z metody Branch Prediction.
Optymalizacja kodu programu
• Optymalizacja polega na próbie dopasowania kodu
programu do architektury i konstrukcji konkretnego
procesora (lub rodziny procesorów),
• Współczesne mikroprocesory projektuje się tak,
aby zmniejszać znaczenie optymalizacji kodu.
• Obecnie kod niezoptymalizowany często może być
wykonywany niewiele wolniej niż odpowiadający
mu kod zoptymalizowany.
Zarządzanie pamięcią
operacyjną
• Procesor musi przetwarzać dane przechowywane
w pamięci operacyjnej.
• Operacje wykonywane na pamięci mają charakter
dwukierunkowy (odczyt lub zapis).
• Zapis polega na przekazania słowa danych
do magistrali danych oraz jego adresu docelowego
na magistralę adresową.
• Odczyt polega na przekazaniu magistrali adresowej
adresu położenia żądanego słowa danych oraz
pobrania tego słowa danych z magistrali danych.
Magistrale adresowe w architekturze x86:
Typ procesora
Szerokość magistrali
procesowej
Ilość możliwej do zaadresowania
pamięci
16-bitowy
20-bitowa
1 MB
16-bitowy
24-bitowa
16 MB
32-bitowy
32-bitowa
4 GB
32-bitowy
36-bitowa
64 GB
64-bitowy
40-bitowa
1 TB
Tryby pracy procesora
Tryb rzeczywisty (Real Mode):
• Procesor 32-bitowy przełącza się w stan odwzorowujący
działanie jednostki 16-bitowej.
• Nie zapewnia ochrony pamięci przed jednoczesnym
wykorzystaniem przez inny proces.
• Nie zapewnia obsługi wielozadaniowości.
• Udostępnia 1 MB przestrzeni adresowej.
Tryb chroniony (Protected Mode):
• Zaprojektowany w celu ochrony procesów pracujących
w wielozadaniowym systemie operacyjnym.
• Umożliwia udostępnienie przestrzeni adresowej większej
niż 1 MB.
• Układy sprzętowe procesora (MMU) kontrolują
odwołania do pamięci operacyjnej.
• W procesorach obsługujących mechanizm stronicowania
tryb chroniony pozwala na całkowitą separację
procesów.
Tryb wirtualny procesora 8086 (Virtual 8086 Mode):
• Pozwala na uruchamianie programów przeznaczonych
dla trybu rzeczywistego w trybie chronionym.
• Każdy program widzi oddzielny wirtualny procesor 8086
pracujący w trybie rzeczywistym.
• Mechanizmy trybu chronionego kontrolujące dostęp
do zasobów i zapobiegające konfliktom pozostają
włączone.
Stronicowanie
• Stronicowanie (Paging) pozwala na ograniczenie
i kontrolę dostępu procesów do pamięci poprzez
użycie tzw. stron (mniejszych sekcji pamięci).
• Pozwala na przydzielenie każdemu procesowi
indywidualnej wirtualnej przestrzeni adresowej.
• Umożliwia wykorzystanie większej ilości pamięci
operacyjnej niż jest fizycznie dostępne w systemie
komputerowym.
Produkcja i podstawowe
parametry procesorów
Prawo Moore’a
• Gordon Moore (jeden z założycieli firmy Intel)
w 1965 r. zaobserwował, że ekonomicznie
opłacalna liczba tranzystorów w układach scalonych
podwaja się co około 18 miesięcy.
• Liczba ta była wielokrotnie korygowana ze względu
na występowanie różnych problemów fizycznych
i technicznych.
• Obecnie przyjmuje się, że liczba tranzystorów
w mikroprocesorach podwaja się co około 24
miesiące.
• Głównym powodem dla którego zachodzi prawo
Moore’a jest ciągły postęp technologiczny
w procesach produkcyjnych mikroprocesorów.
• Pomimo ciągłego rozwoju technologicznego
występują bariery fizyczne dla szerokości ścieżek
oraz przesyłania informacji w układach scalonych.
• Przewiduje się, że prawo Moore’a przestanie
zachodzić w niedalekiej przyszłości.
• Inna popularna wersja Prawa Moore’a (tak zwane
Rozszerzone Prawo Moore’a) mówi, że moc
obliczeniowa mikrokomputerów podwaja się
co około 24 miesiące.
Proces produkcyjny procesora
Etapy produkcji procesora z tranzystorami 3D
(litografia 22 nm stosowana przez firmę Intel)
1. Piasek kwarcowy:
• Podstawowym surowcem
(dwutlenek krzemu).
jest
piasek
kwarcowy
2. Oczyszczanie:
• Krzem musi zostać oczyszczony (podgrzewa się go w celu
utworzenia siatki krystalicznej w formie cylindra).
3. Cięcie i polerowanie:
• Monokrystaliczne cylindry krzemowe są przecinane
na wafle (plastry o grubości około 1 mm) i polerowane.
4. Lakierowanie:
• Na obracający się wypolerowany wafel nanoszona jest
emulsja światłoczuła.
5. Napromieniowanie:
• Emulsja jest wielokrotnie naświetlana (za pomocą
promieni UV i przy wykorzystaniu masek) oraz częściowo
usuwana.
• Następnie następuje trawienie chemiczne krzemu
(powstaje wtedy krzemowa baza tranzystorów).
6. Implementowanie:
• Ponownie nakłada się i naświetla emulsję światłoczułą,
a następnie wafel w odpowiednich miejscach
bombarduje się jonami (co zmienia jego właściwości
przewodzące) i usuwa pozostałą część emulsji.
7. Izolowanie:
• Tranzystor (pomarańczowy) powstaje na skutek
wielokrotnego powtarzanie kroków 5 i 6.
• Po utworzeniu tranzystor jest izolowany od innych
elementów za pomocą dwutlenku krzemu (przezroczysty
czerwony).
8. Galwanizowanie:
• Podczas galwanizacji tworzone są złącza tranzystorów.
• Nadmiar miedzi zostaje spolerowany.
9. Okablowanie:
• Do układu dodaje się okablowanie (połączenia pomiędzy
tranzystorami) zbudowane z kilku warstw metali.
10. Montaż:
• Oddzielony od wafla CPU łączy się ze złączem interfejsu
płyty głównej (zielony) i pokrywą odprowadzającą ciepło
(srebrny).
Rozmiar charakterystyczny
tranzystora
• Jest to parametr techniczny zaawansowania
procesu produkcyjnego oraz gęstości upakowania
tranzystorów w układach scalonych.
• Rozmiarem charakterystycznym tranzystora jest
nazywana minimalna długość kanału tranzystora.
• Im mniejszy rozmiar charakterystyczny tym większe
możliwe upakowanie i szybkość działania.
• Rozmiar charakterystyczny dla współczesnych CPU:
• AMD – obecnie 28 nm, 14 nm planowane w 2017 r.;
• Intel – obecnie 14 nm, 10 nm planowane w 2017 r.
Częstotliwość taktowania
• Taktowanie jest sposobem sterowania pracą układu
cyfrowego.
• Polega na generowaniu i dostarczaniu przez zegar
sygnału elektrycznego (zazwyczaj prostokątnego)
o określonej częstotliwości.
• Mikroprocesor wykonuje 1 podstawową operację
w każdym pojedynczym cyklu (takcie) zegara.
• Do wykonania pojedynczego rozkazu zazwyczaj
potrzebne jest wykonanie kilku podstawowych
operacji.
• Częstotliwość taktowania procesora (Clock Rate)
to podstawowy wskaźnik szybkości z jaką procesor
wykonuje podstawowe operacje.
• Częstotliwość taktowania jest wyrażona w Hercach
(Hz), czyli liczbie cykli przypadających na 1 sekundę.
• Porównywanie współczesnych mikroprocesorów
pod względem częstotliwości taktowania zazwyczaj
nie jest miarodajne.
• Częstotliwość taktowania współczesnych CPU:
• AMD – do 4,3 GHz;
• Intel – do 4,0 GHz.
Napięcie zasilające
• Właściwe napięcie zasilania wszystkich obecnych
procesorów jest dobierane automatycznie.
• Niewielkie podniesienie napięcia zasilającego zazwyczaj
poprawia nieco stabilność pracy procesora, ale
jednocześnie powoduje wzrost poziomu temperatury
struktury półprzewodnikowej mikroprocesora.
• Obwody zasilające jądro procesora są oddzielone
od obwodów zasilających magistrale.
• Układy wytwarzające napięcie zasilania dla CPU mogą
być montowane bezpośrednio na płycie głównej lub
jako dodatkowe moduły VRM (Voltage Regulator
Module).
Współczynnik TDP
• TDP (Thermal Design Power) to ilość wydzielanego
przez mikroprocesor ciepła, którą trzeba
odprowadzić za pomocą układów chłodzenia.
• Firma Intel rozumie TDP jako moc, którą procesor
pobiera i oddaje w postaci ciepła przy obciążeniu
realnymi programami.
• AMD rozumie TDP jako teoretyczną moc jaką CPU
mógłby pobierać i oddawać w postaci ciepła.
• Współczesne procesory posiadają mechanizmy
ograniczające w razie potrzeby pobór mocy.
Gniazdo procesora
• Początkowo mikroprocesory były wlutowywane
bezpośrednio na płytę główną.
• Uniemożliwiało to wymianę CPU na inny model.
• Gniazdo procesora jest to złącze na płycie głównej
przeznaczone do montażu procesora.
• Pełni ono rolę interfejsu pomiędzy procesorem
a pozostałymi podzespołami komputera.
• Dla danego typu gniazda mogą występować pewne
charakterystyczne cechy (np. kształt, napięcie,
częstotliwość taktowania magistrali systemowej).
• Gniazda procesora stosowane w komputerach
osobistych można podzielić na dwa typy:
• Slot (szczelina);
• Socket (gniazdo).
• Obecnie używa się gniazd typu socket.
• Procesor musi być zgodny z typem gniazda (między
innymi).
• Różnice pomiędzy gniazdami mogą być bardzo
subtelne.
• Niektóre gniazda posiadają wsteczną zgodność
z poprzednimi wersjami.
• Obecne gniazda procesorów są wyposażane
w mocowania typu ZIF (Zero Insertion Force).
Dodatkowe technologie
implementowane
w procesorach
Wielordzeniowość
• Procesor wielordzeniowy posiada więcej niż jeden
rdzeń fizyczny.
• Pierwsze wielordzeniowe procesory w architekturze
x86 zostały wprowadzone w 2005 r.:
• Seria AMD Opteron;
• Seria Intel Pentium Extreme Edition.
• Dwa sposoby tworzenia CPU wielordzeniowych:
• Integracja wielu rdzeni w jeden układ scalony.
• Oddzielne kości rdzeni są połączone w jednym
opakowaniu.
• Mogą być różne metody implementacji (np. rdzenie
mogą dzielić pamięć podręczną lub nie, mogą być
takie same lub różne).
• Przyrost wydajności procesora uzyskiwany poprzez
implementację dodatkowych rdzeni zależy w dużej
mierze od dostępnego oprogramowania.
Teraflops Research Chip
• 11.02.2007 r. Intel zaprezentował działający
wielordzeniowy CPU o nazwie Teraflops Research
Chip zbudowany z 80 rdzeni zintegrowanych
w jednym układzie scalonym.
• Jego rdzenie są prostsze od rdzeni stosowanych
w obecnych mikroprocesorach.
• Każdy rdzeń posiada 2 jednostki FPU.
• Rdzenie są połączone ze sobą za pomocą routerów
(każdemu rdzeniowi jest przypisany dedykowany
router).
• Został wyprodukowany w procesie technologicznym
65 nm.
• Zbudowany z około 100 mln. tranzystorów.
• Rozmiar kości to 274,5
Teraflops Research Chip
Częstotliwość
taktowania (GHz)
Napięcie
Teoretyczna wydajność
zasilające (V) (TFLOPS)
Pobór mocy (W)
3,16 GHz
0,95 V
1,01 TFLOPS
62 W
5,1 GHz
1,2 V
1,63 TFLOPS
175 W
5,7 GHz
1,35 V
1,81 TFLOPS
265 W
Pierwszy komputer, który przekroczył w testach
barierę 1 TFLOPS, to zbudowany w 1996 r. komputer
ASCI Red (około 10000 procesorów Pentium Pro
o częstotliwości taktowania 200 MHz, pobór mocy
około 500 kW).
Wielowątkowość
• Polega na możliwości jednoczesnego wykonywania
więcej niż jednego wątku sprzętowego na jednym
fizycznym rdzeniu.
• Implementacja firmy Intel to Hyper-Threading
Technology (zaprezentowana w 2002 r.).
• HTT polega na przypisaniu przez system każdemu
fizycznemu rdzeniowi dwóch wirtualnych rdzeni
logicznych i rozdzieleniu pomiędzy nie wątków
do wykonania (jeżeli jest to możliwe).
• Obecnie AMD nie implementuje odpowiednika
technologii HTT.
• Procesory AMD (od zaprezentowanej w 2011 r.
architektury Bulldozer) korzystają z technologii
Clustered Multi-Threading (CMT).
• CMT w wersji AMD polega na wykorzystaniu
do budowy CPU modułów (każdy moduł zawiera
dwie niezależne jednostki ALU i jedną 256-bitową
jednostkę FPU zbudowaną z połączenia dwóch
jednostek 128-bitowych).
• Każdy pojedynczy moduł jest traktowany jako
dwurdzeniowy ze względu na ALU.
• W zależności od rodzaju aktualnie wykonywanego
kodu moduł jest traktowany jako jednordzeniowy
lub dwurdzeniowy ze względu na FPU
• HTT jest odmianą technologii Simultaneous MultiThreading (SMT).
• Implementacja wielowątkowości typu SMT
dla mikroprocesorów AMD jest przewidziana
na 2017 r. (w architekturze Zen).
Mostek północny i południowy
• Mostek północny (Northbridge) i południowy
(Southbridge) są dwoma najważniejszymi układami
współpracującymi z procesorem.
• Procesor jest połączony z mostkiem północnym
za pomocą szyny systemowej (Front Side Bus, FSB).
• Mostek
północny
najczęściej
odpowiada
za komunikację CPU z pamięcią RAM, szybkimi
magistralami przeznaczonymi dla kart graficznych
(np. PCI-E) i mostkiem południowym.
• Czasami układ mostka północnego zawiera
zintegrowaną w nim kartę graficzną.
• AMD począwszy od serii procesorów Athlon64
(2003 r.) integruje pewne funkcje mostka
północnego (kontroler pamięci RAM) w CPU.
• AMD od 2011 r. w serii procesorów Accelerated
Processing Unit (APU) integruje układ graficzny
w CPU.
• Intel począwszy od układów architektury Nehalem
(2008 r.) integruje układy mostka północnego
w CPU.
• W architekturze Clarkdale (2010 r.) Intel integrował
układ graficzny i kontroler pamięci jako oddzielną
kość umieszczoną w jednym opakowaniu razem
z CPU.
• Począwszy od architektury Sandy Bridge (2011 r.)
Intel integruje układ graficzny, kontroler pamięci
i CPU w pojedynczej kości.
Instrukcje multimedialne
• Od 1997 r. Intel zaczął implementować w swoich
procesorach
zestawy
dodatkowych
rozkazów
multimedialnych (początkowo instrukcje MMX –
MultiMedia eXtensions, później SSE – Streaming SIMD
Extensions).
• Ostania dodana partia rozkazów ma numer SSE 4.2.
• AMD w 1998 r. zaczęło implementować własny
dodatkowy zestaw rozkazów multimedialnych 3DNow!
• W 2010 r. AMD wstrzymało implementację instrukcji
3DNow! w nowych modelach swoich CPU.
• Obecnie procesory AMD (w większości) mają
zaimplementowaną obsługę instrukcji MMX i SSE.
Automatyczne przetaktowywanie
• Od architektury Nehalem (2008 r.) Intel
w niektórych modelach procesorów implementuje
technologię automatycznego przetaktowywania
rdzeni nazywaną Turbo Boost.
• Turbo Boost automatycznie podwyższa lub obniża
częstotliwość taktowania poszczególnych rdzeni
CPU w zależności od warunków takich jak np.
aktualny pobór mocy ,współczynnik TDP oraz
maksymalna dopuszczalna częstotliwość zegara
taktującego.
• AMD w 2010 r. zaimplementowało w niektórych
swoich CPU technologię Turbo Core działającą
na podobnej zasadzie jak konkurencyjny Turbo
Boost.